Embed Size (px)
Citation preview

“Fertibot”
Mike AmbriscoAndrew Bourgeois
Eric HallAaron Minard

Background
Robots in agriculture are emerging
A prototype of the Precision-Ag-in-a-Box sensor suite
gathered data during the field tests.
Disease detecting robots
John Deere and NREC building a fleet of robots for testing
Testing during day and night
National Robotics Engineering CenterIntegrated Auomation for Sustainable Specialty Crops
http://www.rec.ri.cmu.edu/usda/index.html

Problem
Develop an automated robotic system that can distribute 8oz of a granulated fertilizer uniformly around the perimeter at the edge of an apple tree canopy.

Design Solutions
Distribution• “Water Wheel” • Weight SensorsNavigation• Geo-Magnetic CompassFinding the Tree Canopy• Ultrasonic Sensors

Actual Solutions
Distribution• Conveyor• Per degree of travelNavigation• Magnetic Field SensorFinding the Canopy• Ultrasonic Sensors

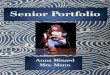
System Diagram

Programming Overview


Wiring Schematic

Programming State Diagram

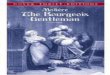
Sensors We Are Using
Magnetic Field Sensor Ultrasonic Distance Sensor
Detects the Earth’s magnetic field Strength along X axis and along Y axis.
Detects distance from an object by sending a ping and measuring the return time.
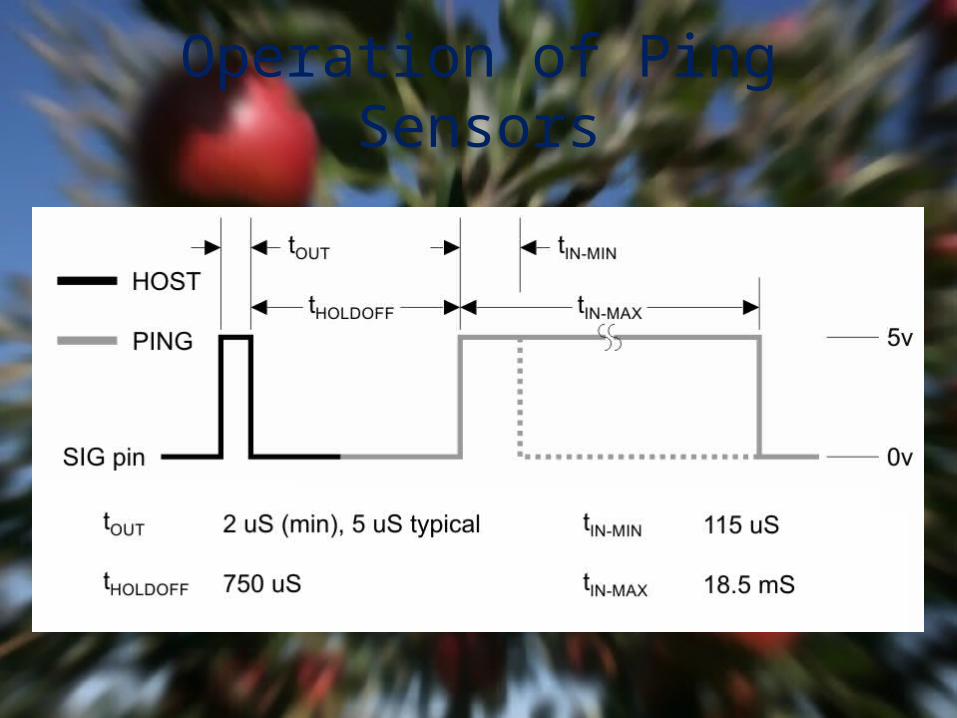
Operation of Ping Sensors

Control of Ping Sensors

Mechanical

Personal Assignments
Mechanical SystemsManager: Andrew BourgeoisAssistants: Mike Ambrisco, Eric Hall, Aaron Minard
Sensor Design and ConfigurationManager: Aaron MinardAssistants: Eric HallTroubleshooting: Andrew Bourgeois
Electrical and Software DesignManager: Andrew Bourgeois, Aaron MinardAssistants: Eric Hall, Mike Ambrisco
Documentation and ResearchEvery member of Team Blue contributed in the research and documentation of the
project.

Time LineCategory Sub Category Week 1 Week 2 Week 3 Week 4 Week 5 Week 6 Week 7 Week 8
Reasearch - X X X X
Discussion - X X X X X X X X
Design - X X X X X X X
Prototypes - X X X
Cad Design - X X X X X
Fabracation -
- Hopper X X X
- Base Frame X X X
- Brackets X X X X X
- Feeder X X X
- Drive System X X

BudgetItem Quantity Cost Total Cost Paid For
12V Motors 2 $17.50 $35.00 $0.00
Motor Controller
1 $119.99 $119.99 $0.00
Conveyer Controller
1 $18.95 $18.95 $0.00
Micro/ accessories
1 $15.00 $15.00 $0.00
Ping Sensors 4 $30.00 $120.00 $0.00
Compass 1 $30.00 $30.00 $0.00
Materials 1 - - $15.00
T-Slotted Aluminum Extrusion
8 ft $26.38 $26.38 $0.00
T-Nuts and Cap Screws
74 $1.85/4 $34.23 $0.00
Totals $414.55 $15.00

Questions?

DocumentationAll paper documents can be found in the Team Blue notebook