-
8/12/2019 Feedback Controllers R12
1/21
-
8/12/2019 Feedback Controllers R12
2/21
-
8/12/2019 Feedback Controllers R12
3/21
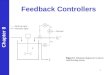
S T I R R E D-T A N K H E A T E R
-
8/12/2019 Feedback Controllers R12
4/21
WHY PROCESS TO BE CONTROLLED?
-
8/12/2019 Feedback Controllers R12
5/21
Safety
Environmental friendly
Operator friendly
To improve product quality
To increase production rate
Highly integrated plant with small
surge capacities
-
8/12/2019 Feedback Controllers R12
6/21
Tougher competition
To make profitable
Reduced raw material cost
Extended equipment life
Most economical operating
conditions
Reduced energy consumption
-
8/12/2019 Feedback Controllers R12
7/21
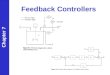
Typical Response to a step change in load variable
0 Time
PV
No control
P control
PIPI
PID
0 Time
Increasing Kc
No control (Kc= 0)
Typical process responses P control: effect of KC
Time0
Increasing TI
Time0
Increasing kc
PI control : effect of TI
PV
PVPV
PI control : effect of KC
SPSP
SP SP
-
8/12/2019 Feedback Controllers R12
8/21
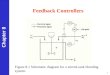
Typical Response to a step change in load variable
Time0
TDIncreasing
PID Control: effect of TD
PV SP
Increasing TDfrom zero
Improves speed of response by Reducing
maximum deviationresponse time
oscillation
-
8/12/2019 Feedback Controllers R12
9/21
LV Simple PID Position Algorithm
Algorithm: Parallel PID controller
DnInpnn mmmm
t
t
Ip dt
deTdtte
TteKtm
D
0
)()(
1)()(
11
nnD
n
k
kI
nn eet
Te
T
tem
-
8/12/2019 Feedback Controllers R12
10/21
LV Simple PID Position AlgorithmCont.
Controller Inputs
PV = Process Variable
SP = Set Point
tn = Most recent sampling start instant
nt
t
-
8/12/2019 Feedback Controllers R12
11/21
LV Simple PID Position AlgorithmCont.
Controller Tuning Parameters
P= Kp =Proportional component
I = 1
/TI
=Integral component
D= TD=Derivative component
mmax
= Upper limit of controller output
mmin= Lower limit of controller output
nt
-
8/12/2019 Feedback Controllers R12
12/21
LV Simple PID Position Algorithm Cont.
Error
nnn PVSPe
Deviation Error
1_nnn
eee
-
8/12/2019 Feedback Controllers R12
13/21
LV , P--- Controller
nnppn ePeKm
-
8/12/2019 Feedback Controllers R12
14/21
LV, I Controller
n
k
k
I
In eT
tm1
n
I
nIIn e
T
tmm
)1(
I
n
nIIn
T
temm
)1(
teImmnnInI
)1(
WhereI
TI
1
-
8/12/2019 Feedback Controllers R12
15/21
LV, D Controller
t
eTm nDDn
t
eDm nDn
WhereDTD
-
8/12/2019 Feedback Controllers R12
16/21
LV Simple PID Controller Cont
DnInpnn mmmm
Controller Output
Controller Output Limiting
minmmnIf Then minmmn
If maxmmn Then maxmmn
nn mm
Otherwise
-
8/12/2019 Feedback Controllers R12
17/21
LV Simple PID Controller Cont
Normalization of Output
IfThen
Otherwise
minmax mm
maxm
mm
n
n
minm
mm
n
n
-
8/12/2019 Feedback Controllers R12
18/21
LV Simple PID Position Algorithm
A
1_nnn ttt
Input Parameters : PV, SP, tn
Tuning Parameters: P, I, D, mmax,mminParameter Initialization:
mI0=0,mD0=0
IS1msect
1msect
+ +
A
No Yes
-
8/12/2019 Feedback Controllers R12
19/21
LV Simple PID Position AlgorithmCont.
nnn PVSPe
nppn eKm
teImm nnInI )1( 1_nnn eee
t
eDm n
Dn
nDnInpn mmmm
A
B
-
8/12/2019 Feedback Controllers R12
20/21
LV Simple PID Position Algorithm Cont.
Controller Output Limiting
IS
No
Yes
IS
No
B
minmmn
maxmmn minmmn
Yes
maxmm
n
+ +
+
BBB
C
-
8/12/2019 Feedback Controllers R12
21/21
LV Simple PID Position Algorithm Cont.
Normalization of Output
No IS
B
Yes
+ +
BBC
minmax mm
maxm
m
m n
n
minm
mm nn