Embed Size (px)
Citation preview

ESE319 Introduction to Microelectronics
12008 Kenneth R. Laker updated 15Nov09 KRL
Feedback Basics● Stability● Feedback concept● Feedback in emitter follower● One-pole feedback and root locus● Frequency dependent feedback and root locus● Gain and phase margins● Conditions for closed loop stability● Frequency compensation

ESE319 Introduction to Microelectronics
22008 Kenneth R. Laker updated 15Nov09 KRL

ESE319 Introduction to Microelectronics
32008 Kenneth R. Laker updated 15Nov09 KRL
F
F
F
F
F
Operational Amplifier From Another View
ΓF
vf
vovi A
AA
A
A
A A
AA

ESE319 Introduction to Microelectronics
42008 Kenneth R. Laker updated 15Nov09 KRL
Feedback Block Diagram Point of View
A
β
-+vi vo
vo=A
1AFv i
Fundamental feedback equation
Fundamental block diagram We can split the idealop amp and resistivedivider into 2 separateblocks because theydo not interact with, or“load,” each other.
1. The op amp output isan ideal voltage source.
2. The op amp input draws no current.
F
vf

ESE319 Introduction to Microelectronics
52008 Kenneth R. Laker updated 15Nov09 KRL
Comments on the Feedback Equation
Acl=vo
v i= A1AF
The quantity loop-gain and A
cl = closed-loop gain.
AF≫1(and the system is stable – a topic to be discussed later!) the closed-loop gain approximates and is independent of “A” !
AF
1/F
The quantity A = open-loop gain and = feedback gain.
If the loop gain is much greater than one, i.e.
F
A=vo
vi
A
β
-+vi vo
F
vf
F=v f
vo
Av−cl=vo
vi≈ 1F
|v f =0

ESE319 Introduction to Microelectronics
62008 Kenneth R. Laker updated 15Nov09 KRL
Feedback in the Emitter FollowerEmitter current equation:
ie=1
Rs
1r eRE
v i
Create an “artificial” feedback equation, multiply numerator & denominator by :
vo=
RE 1Rs
1RE 1
R s
reRE RE
v i=A
1AFvi
1/Rsib
ie
ib
vo=RE ie=RE
R s
1reRE
vi

ESE319 Introduction to Microelectronics
72008 Kenneth R. Laker updated 15Nov09 KRL
Emitter Follower Emitter CurrentThe forward gain open-loop term, A:
A=RE 1
Rs
The feedback term, :
F=reRE
RE
If the “loop gain” is large,
vo≈1F
vi=RE
r eREv i
F
AF≫1
ib i
b
ie
Dependence on is eliminated.
vo=
RE 1Rs
1RE 1
R s
reRE RE
v i=A
1AFvi
AF=RE 1
Rs
reRE
RE=1
r eRE
Rs≫1

ESE319 Introduction to Microelectronics
82008 Kenneth R. Laker updated 15Nov09 KRL
Loop Gain Sensitivities For:Open-loop gain:dAcl
dA= 1
1AF 2
dAcl
Acl=
1
1AF 21AF
AdA
dAcl
Acl= 1
1AF dAA
0
Feedback gain:dAcl
d F=
−A2
1AF 2
dAcl
Acl=
−A2
1AF 21AF
Ad F
dAcl
Acl=
−AF
1AF d F
F−
d F
F
High loop gain makes system insensitive to A, but sensitive to !
Acl=A
1AF
F
AF ∞ AF ∞

ESE319 Introduction to Microelectronics
92008 Kenneth R. Laker updated 15Nov09 KRL
Feedback - One-pole A(s)
Consider the case where:
As=a K 0
sa
A
β
-+vi vov
f
F
Acl=vo
v i=
A1AF
Acl s ,F =
a K 0
sa
1F a K 01
sa
=a K 0
saF a K 0
open-loop pole
closed-loop pole
Where and K0 are positive real quantities.F
X-a
j
s= j
F=0
∞F
Root Locus Plot for Acl s ,F
stable for all ΓF!
pole(s) of Acl(s) are the roots of 1 + AΓF = 0, or
AsF=−1=1∗e j± 2k for k = 0, 1, ...

ESE319 Introduction to Microelectronics
102008 Kenneth R. Laker updated 15Nov09 KRL
Feedback - One-pole A(s) cont.As=
a K 0
saAcl s=
a K 0
saF a K 0= N s
D s
GBW OL=GBW CL=a K 0
a
Kω
Gain - dB
- 20 dB/dec
20 log10K 0
1F K 0
a1F K 00
- 20 dB/dec
20 log10 K 0
frequency (ω)
open-loop (OL) closed-loop (CL)

ESE319 Introduction to Microelectronics
112008 Kenneth R. Laker updated 15Nov09 KRL
One-pole Feedback - Root LocusAcl s=
a K 0
saF a K 0=
N sD sAs=
a K 0
saD s=saF a K 0=0Pole of A
cl(s):
saF a K 0=0⇒F a K 0
sa=−1=1∗e j ±2k
F1 a K 0
∣r1a∣=1−sr1 =± 2k and
x
r1
|r1+a|
-a
r1a
-ax
12
r1a=0≠± 2k1
r1a=
∞F K0≥ 0 Not allowed
r1r
1
j
js= j
2
for k = 0, 1, ...
AsF=−1=1∗e j± 2k
r1 is a root of D(s) = 0 or 1 + A(s)Γ
F = 0 iff
or s=−aF a K 0
for p.r. ΓF1

ESE319 Introduction to Microelectronics
122008 Kenneth R. Laker updated 15Nov09 KRL
Frequency-Dependent FeedbackConsider the case where the open-loop gain is:
As=K sasb sc abc
dc Gain: Ass=0=K 0a0b0c
=K abc
=K 0
A sketch of the Bode plot would look something like:
a b c
Kω
20 log10
|A(s)| - dB
+ 20 dB/dec
- 20 dB/dec
open-loop (OL)
20 log10 K 0
As=K sasb sc
abc

ESE319 Introduction to Microelectronics
132008 Kenneth R. Laker updated 15Nov09 KRL
Frequency-Dependent Feedback

ESE319 Introduction to Microelectronics
142008 Kenneth R. Laker updated 15Nov09 KRL
Acl s =K 0
sasb sc
1F K 0sa
sbsc
=K 0sa
sb scF K 0sa
-a-b-cx x o
j
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
abc

ESE319 Introduction to Microelectronics
152008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?

ESE319 Introduction to Microelectronics
162008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?

ESE319 Introduction to Microelectronics
172008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?

ESE319 Introduction to Microelectronics
182008 Kenneth R. Laker updated 15Nov09 KRL
-a-b-cx x ol
“ri”
j
Acl s =K 0
sasb sc
1F K 0sa
sbsc
=K 0sa
sb scF K 0sa
Acl(s) IS stable for all ΓF!
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
1. zeros of Acl(s) = zeros of A(s) and are independent of feedback
2. poles of Acl(s) ≠ poles of A(s) are a function of the feedback
abc

ESE319 Introduction to Microelectronics
192008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
As=K 0bc
sb sc
Acl s=K 0bc
sbscF K 0bc=
N sD s
b c
Kω
20 log10
|A(s)| - dB
- 20 dB/dec
- 40 dB/dec
-b-cX X
20 log10 K 0
j
two-pole bc

ESE319 Introduction to Microelectronics
202008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
As=K 0bc
sb scAcl s=
K 0bcsbscF K 0bc
=N sD s
-b-cX X
∞F ≥ 0
jcomplex conjugate poles of A
cl(s)
Av(s) IS stable for all ΓF!
bc

ESE319 Introduction to Microelectronics
212008 Kenneth R. Laker updated 15Nov09 KRL
As=K 0bcd
sb scsd Acl s=
K 0bcdsbscsd F K 0bcd
= N sD s
-b-cX XX-d
j
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
bcd

ESE319 Introduction to Microelectronics
222008 Kenneth R. Laker updated 15Nov09 KRL
What's the Root Locus for Acl(s)?
Is Acl(s) Stable for all Γ
F?
As=K 0bcd
sb scsd Acl s=
K 0bcdsbscsd F K 0bcd
= N sD s
-b-cX XX-d
Acl(s) NOT stable for all ΓF!
jbcd

ESE319 Introduction to Microelectronics
232008 Kenneth R. Laker updated 15Nov09 KRL
The Root Locus MethodThis graphical method for finding the roots of a polynomialis known as the root locus method. It was developed beforecomputers were available. It is still used because it givesvaluable insight into the behavior of feedback systems asthe loop gain is varied. Matlab (control systems toolbox) will plot root loci.
In the frequency-dependent feedback (two-pole & one-zero) example, we noted that increasing feedback increases the CL bandwidth – i.e. the low & high frequency break points moved in opposite directions as ΓF increases. Higher ΓF , as a trade-off, reduces the closed-loop mid-band gain.

ESE319 Introduction to Microelectronics
242008 Kenneth R. Laker updated 15Nov09 KRL
GM
oscillation or instability
Acl j=V o jV i j
=A j
1A j F
F
F
F
F
F
F
loop-gain
mutually consistent stability conditions
20log∣A j∣F
A jF=1 e j±2k
∣A j180∣F1
20 log∣A j180∣F0dB
j1=arg [A j1F ]−180o
GM=0dB−20 log10∣A j180∣F

ESE319 Introduction to Microelectronics
252008 Kenneth R. Laker updated 15Nov09 KRL
∣Acl j ∣
F
PM50o
(maximally flat response)
-12 dB/octave
ω (log scale)
Nor
mal
ized
gai
n (d
B)Acl j=
vo
v i=
A j1A jF

ESE319 Introduction to Microelectronics
262008 Kenneth R. Laker updated 15Nov09 KRL
70oPM55o
∣Acl j ∣
-12 dB/octave
(maximally flat response)
Nor
mal
ized
gai
n (d
B)

ESE319 Introduction to Microelectronics
272008 Kenneth R. Laker updated 15Nov09 KRL
Alternative Stability Analysis1. Investigating stability for a variety of feedback gains Γ
F by
constructing Bode plots for the loop-gain A(jω)ΓF can be tedious
and time consuming.
2. A simpler approach involves constructing Bode plots for A(jω) and Γ
F (or 1/Γ
F) separately.
20 log∣A jF∣=20 log∣A j∣−20 log 1F
A jF≫1⇒ Acl j=A j
1A jF≈1F
20 log∣A j∣=1=20 log 1
F⇒20 log∣A j1F∣=0dB⇒∣A j1F∣=1
RECALL:
when
closed-loop gain
20 logF=−20 log 1F

ESE319 Introduction to Microelectronics
282008 Kenneth R. Laker updated 15Nov09 KRL
Alternative Stability Analysis - cont.
stable iff20log 1/Γ
F > 60 dB
or20log Γ
F < -60 dB
orΓ
F < 0.001
.=20 log∣A jf ∣−20 log 1F
20log 1/ΓF = 60 dB
dB
100
80
60
40
20
0000
-90o
-180o
-270o
f1
20log∣A jf ∣
arg A jf 102 104 106 108
108106104102
A jf = 105
1 jf /1051 jf /1061 jf /107
20 log∣A jf F∣
f (Hz)
f (Hz)
zero PM & GM
f180
20 log∣A jf 1F∣=0
-40 dB /dec
-60 dB /dec
-20 dB /dec
f1 = f
180
=> f1 < f
180
20 log∣A jf F∣

ESE319 Introduction to Microelectronics
292008 Kenneth R. Laker updated 15Nov09 KRL
f180
f1
PM = GM = 0
20log 1/ΓF = 85 dB
f1 < f
180GM =25 dB
20 log∣A j f 1F∣=0
20 log∣A jf F∣=20 log∣A jf ∣−20 log 1F
A jf = 105
1 jf /1051 jf /1061 jf /107
jf 1=arg [A jf 1F ]−180o
φ(jf1) = -108o
PM =φ(jf1) + 180o = 72o stable!
20log∣A jf ∣

ESE319 Introduction to Microelectronics
302008 Kenneth R. Laker updated 15Nov09 KRL
PM = GM = 0
A jf = 105
1 jf /1051 jf /1061 jf /107
20 log∣A jf F∣=20 log∣A jf ∣−20 log 1F
-40 dB /dec
20log 1/ΓF = 50 dB 20 log∣A j f 1F∣=0
f180
GMGM = - 20 dB
φ(jf1) = -210o PM =φ(jf1) + 180o = -30o unstable!
20log∣A jf ∣

ESE319 Introduction to Microelectronics
312008 Kenneth R. Laker updated 15Nov09 KRL
Alternative Stability Analysis - cont.
stable iff20log 1/Γ
F > 60 dB
or20log Γ
F < -60 dB
orΓ
F < 0.001
-40 dB /dec
20 log∣AF∣
dB
100
80
60
40
20
0000
-90o
-180o
-270o
72o PM
stable
zero PM & GM 25 dB GM
20 log∣A jf ∣
arg A jf 102 104 106 108
108106104102
f (Hz)
f (Hz)
f1
φ(jf1) = -108o
-20 dB /dec
f180
A jf = 105
1 jf /1051 jf /1061 jf /107
20 log∣A jf F∣=20 log∣A jf ∣−20 log 1F
-60 dB /dec

ESE319 Introduction to Microelectronics
322008 Kenneth R. Laker updated 15Nov09 KRL
Alternative Stability Analysis - cont.
“Rule of Thumb” – Closed -loop amplifier will be stable if the 20log1/ΓF line intersects the 20log|A(j f)| curve on the -20 dB/dec segment.
Using “Rule of Thumb”:
PM45o=>
20log∣A jf ∣-20 dB /dec
-40 dB /dec
-60 dB /dec
stable
unstable
unstable
A jf = 105
1 jf /1051 jf /1061 jf /107
20 log∣A jf F∣=20 log∣A jf ∣−20 log 1F
f180
f1
arg (A(jf1) ΓF) arg (A(jf1) ΓF) > - 135o

ESE319 Introduction to Microelectronics
332008 Kenneth R. Laker updated 15Nov09 KRL
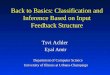
Rate of Closure (RC) RC=slope A j2 f dB/dec−slope 1
F
dB /dec
RECALL:“Rule of Thumb” – Closed-loop amplifier will be stable if 20log1/ΓF line intersects 20log|A(j f)| curve on the -20 dB/dec segment.
“Equivalent Rule of Thumb” – Closed-loop amplifier will be stable if
RC ≥−20dB /dec
RC = - 20 dB/dec – 0 dB/dec = - 20 dB/dec
RC = - 20 dB/dec – 0 dB/dec = - 40 dB/decRC = - 20 dB/dec – 0 dB/dec = - 40 dB/dec
argPM = 72o
100
20log∣A jf ∣

ESE319 Introduction to Microelectronics
342008 Kenneth R. Laker updated 15Nov09 KRL
Frequency Dependent Feedback
100
80
60
40
20
01 10 100 1k 10k 100k 1M 10M
Frequency (Hz)
dB A(j2πf)
1/Γ1(j2πf)
1/Γ2
1/Γ3
1/Γ4(j2πf)
RC=slope A j2 f dB/dec−slope 1F
dB /dec
RC1=−20dB /dec−20dB /dec =−40dB /dec
RC 2=−20 dB /dec−0dB /dec =−20 dB /dec
RC3 = - 40 dB/dec – (0 dB/dec) = - 40 dB/dec
RC4 = - 40 dB/dec – (-20 dB/dec) = - 20 dB/dec
“Equivalent Rule of Thumb” – Closed-loop amplifier will be stable if
RC ≥−20dB /dec
-20 dB /dec

ESE319 Introduction to Microelectronics
352008 Kenneth R. Laker updated 15Nov09 KRL
Frequency Compensation
frequency compensation – modifying the open-loop A(s) so that the closed-loop A
cl(s) is stable for any desired value of |A
cl(jf)| by extending the -20 dB/dec segment.
desired implementation - minimum on-chip or external components.
Ex: LM 741 op amp is frequency compensated to be stable with 60o PM for 20 log |A
cl(jf)| = 20 log 1/ΓF = 0 dB.
1/ΓF1/ΓF
1/ΓF
1/ΓF
20log∣A jf ∣

ESE319 Introduction to Microelectronics
362008 Kenneth R. Laker updated 15Nov09 KRL
Compensation – What if 1st pole is shifted lower?VCC
dB
100
80
60
40
20
0000
-90o
-180o
-270o
20log∣A jf ∣
102 104 106 108
108106104
-20 dB /dec
-40 dB /dec
-60 dB /dec
-60 dB /dec
-40 dB /dec
-20 dB /dec
20log∣Acomp jf ∣ 20log 1/ΓF1
= 85 dB
20log 1/ΓF2
= 45 dB
Acomp jf ≈ 105
1 jf /1031 jf /1061 jf /107
f (Hz)

ESE319 Introduction to Microelectronics
372008 Kenneth R. Laker updated 15Nov09 KRL
Frequency Compensation Using Miller EffectVCC C comp
C1 C2R1 R2V gm V I i
I i
V o
V o
C1=CC 1g m R2
R1=RB∥r
RC
R2=RC∥r o∥Rin2Rin2
C2
V o
I i=
s C comp−g mR1 R21s [C1 R1C2 R2C comp g m R1R2R1R2]s2[C1C 2C comp C1C2]R1 R2
.=sC comp−gmR1 R2
1 sp1c
1 sp2c
=
sC comp−gmR1 R2
1s 1 p1c
1 p2c
s2
p1cp2c
where p2c≫p1c
p1=1
R1C1
p2=1
R2C2
BJT Miller Capacitance
with Comp = 0
C comp

ESE319 Introduction to Microelectronics
382008 Kenneth R. Laker updated 15Nov09 KRL
Compensation Using Miller Effect - cont.V o
I i=
sC comp−gmR1 R2
1s 1 p1c
1 p2c
s2
p1cp2c
≈sC comp−gmR1 R2
1s 1p1c
s2 1p1c p2c
p2c≫p1cIf
V o
I i=
s C comp−gmR1 R21s [C1 R1C2 R2C comp gm R1R2R1R2]s2[C 1C 2C comp C1C2]R1 R2
and
p1c=1
C1 R1C2 R2C comp g m R1R2R1R2≈ 1
C comp gm R2R1
p2c= p1c p2c
p1c=
C1 R1C2 R2C comp gm R1R2R1R2[C1C2C comp C1C 2]R1R2
≈C comp g m
C comp C1C2≈
g m
C1C2
Ccomp C1C2≫C1C2
pole-splitting
assumption
Compensation Miller Capacitance
If

ESE319 Introduction to Microelectronics
392008 Kenneth R. Laker updated 15Nov09 KRL
Compensation Using Miller Effect - cont.
f p1c= p1c
2≈
12 [C comp gm R1 R2]
f p2c= p2c
2≈
gm
2 [C1C2]
A jf = 105
1 jf105
1 jf106
1 jf107
= 105
1 jff p1
1 jff p2
1 jff p3
Using Miller effect compensation: fp1
-> fp1c
<< fp1
and fp2
-> fp2c
>> fp2
Also fp3
, determined by another stage, is unaffected by the compensation => fp3c
= fp3
Acomp jf = 105
1 jff p1c
1 jff p2c
1 jff p3
(pole-splitting)
f p1=p1
2=
1R1C1
f p2=p2
2=
1R2C 2

ESE319 Introduction to Microelectronics
402008 Kenneth R. Laker updated 15Nov09 KRL
Miller Compensation Example
Design Objective: determine Ccomp s.t. fp1c = 100 Hz and compute fp2c.
Given:A jf = 105
1 jfR1C1
1 jfR2C 2
1 jf107
=
105
1 jff p1
1 jff p2
1 jf107
=
105
1 jf105
1 jf106
1 jf107
f p2c=gm
2C1C2≈61MHz
Acomp jf = 105
1 jf102
1 jff p2c
1 jf107
= 105
1 jff p1c
1 jff p2c
1 jf107
where C1 = 100 pF, C
2 = 5 pF, g
m = 40 mS, R
1 = 100/2π kΩ and R
2 = 200/2π kΩ
f p1c=100Hz≈ 12 [C comp gm R1 R2]
=22
2 [C comp 40x10−31052x105]
⇒C comp=78.5 pF

ESE319 Introduction to Microelectronics
412008 Kenneth R. Laker updated 15Nov09 KRL
Compensation Using Miller Effect - cont.dB
100
80
60
40
20
000
20log∣A jf ∣
102 104 106 108
-20 dB /dec
-40 dB /dec
-60 dB /dec
-60 dB /dec -40 dB /dec
-20 dB /dec20log∣Acomp jf ∣
20log 1/ΓF = 0 dBf (Hz)
0
-90o
-180o
-270o
108106104
1-pole roll-off !
Acomp jf ≈ 105
1 jf102
1 jf6.1∗107
1 jf107
PM45o for∣Acl jf ∣= 1F≥1
A jf = 105
1 jf105
1 jf106
1 jf107
Acomp jf

ESE319 Introduction to Microelectronics
422008 Kenneth R. Laker updated 15Nov09 KRL
SummaryFeedback has many desirable features, but it can createunexpected - undesired results if the full frequency-dependent nature (phase-shift with frequency) of the feedback circuit is not taken into account.
Feedback can be used to convert a well-behaved stable circuitinto an oscillator. Sometimes, due to parasitics, feedback inamplifiers results in unexpected oscillations.
The root-locus method was used to show how feedback cancreate the conditions for oscillation and instability.