Embed Size (px)
DESCRIPTION
Feedback: 8.8 The Stability Problem. 1. 8.8.1 Transfer Function of the Feedback Amplifier. Figure 8.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals. - PowerPoint PPT Presentation
Citation preview

1
Feedback: 8.8 The Stability Problem

Microelectronic Circuits - Fifth Edition Sedra/Smith 2Copyright 2004 by Oxford University Press, Inc.
Figure 8.1 General structure of the feedback amplifier. This is a signal-flow diagram, and the quantities x represent either voltage or current signals.
1f
A sA s
A s s
1f
A jA j
A j j
8.8.1 Transfer Function of the Feedback Amplifier

Microelectronic Circuits - Fifth Edition Sedra/Smith 3Copyright 2004 by Oxford University Press, Inc.
jL j A j j A j j e
Suppose that there is a frequency, , for which 180 180
180 180 1j je e 180
1f
A jA j
A j j
Then
8.8.1 Transfer Function of the Feedback Amplifier
Loop Gain:

Microelectronic Circuits - Fifth Edition Sedra/Smith 4Copyright 2004 by Oxford University Press, Inc.
1f
A jA j
A j j
If , then 1A j j fA j A j
(Armstrong’s “regeneration”)
If , then 1A j j fA j (Armstrong’s “oscillation”)
8.8.1 Transfer Function of the Feedback Amplifier

Microelectronic Circuits - Fifth Edition Sedra/Smith 5Copyright 2004 by Oxford University Press, Inc.
8.9.1 Stability and Pole Location
A quick review

Microelectronic Circuits - Fifth Edition Sedra/Smith 6Copyright 2004 by Oxford University Press, Inc.
Figure 8.29 Relationship between pole location and transient response.
2 coso n n ot j t j t tnv t e e e e t

Microelectronic Circuits - Fifth Edition Sedra/Smith 7Copyright 2004 by Oxford University Press, Inc.
8.9.2 Poles of the Feedback Amplifier
Recall the closed loop transfer function (transfer function with feedback):
1f
A sA s
A s s
Poles:
1 0A s s

Microelectronic Circuits - Fifth Edition Sedra/Smith 8Copyright 2004 by Oxford University Press, Inc.
8.9.3 Amplifier with a Single-Pole Response
Simple example: suppose an amplifier without feedback has a single pole at :
0
1 P
AA s
s
With negative feedback, we saw earlier that, assuming constant, the amplifier gain is:
0 0
0
1
1 1fP
A AA s
s A
Ps

Microelectronic Circuits - Fifth Edition Sedra/Smith 9Copyright 2004 by Oxford University Press, Inc.
0 0
0
1
1 1fP
A AA s
s A
The feedback has moved the pole along the axis from to .P 01P A
8.9.3 Amplifier with a Single-Pole Response

Microelectronic Circuits - Fifth Edition Sedra/Smith 10Copyright 2004 by Oxford University Press, Inc.
Let . When , 01P A
0 0 0 0
0 0
1 1
1 1 1fP P
A A A AA j
j A j A
s j
0 Pf
AA j
j
0 0 0
1P
P P
A A AA j
j j j
8.9.3 Amplifier with a Single-Pole Response

Microelectronic Circuits - Fifth Edition Sedra/Smith 11Copyright 2004 by Oxford University Press, Inc.
Summary: when , 01P A
0 Pf
AA j A j
j
8.9.3 Amplifier with a Single-Pole Response

Microelectronic Circuits - Fifth Edition Sedra/Smith 12Copyright 2004 by Oxford University Press, Inc.
Figure 8.30 Effect of feedback on (a) the pole location and (b) the frequency response of an amplifier having a single-pole open-loop response.
8.9.3 Amplifier with a Single-Pole Response

Microelectronic Circuits - Fifth Edition Sedra/Smith 13Copyright 2004 by Oxford University Press, Inc.
Figure 8.36 Bode plot for the loop gain A illustrating the definitions of the gain and phase margins.
1; 0dB
A A
180 Instability:
1020logdB
A A j j
AND
8.10.1 Gain and Phase Margins

Microelectronic Circuits - Fifth Edition Sedra/Smith 14Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Typical phase margin design value:45
Value of phase margin affects shape of closed- loop gain versus frequency plot.

Microelectronic Circuits - Fifth Edition Sedra/Smith 15Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Example: suppose0;
0 1A
0 0 0
0 0
1
1 1f
A j A AA j
A j A A
00;A j A real
Closed loop gain at low frequencies:

Microelectronic Circuits - Fifth Edition Sedra/Smith 16Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Suppose
1 1A j for some frequency 1 .
1 1
1 1
j j jA j A j e e e
where 0
1
1 jA j e
. Thus, we can write

Microelectronic Circuits - Fifth Edition Sedra/Smith 17Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
phase margin = 180
phase margin = 180
180 phase margin

Microelectronic Circuits - Fifth Edition Sedra/Smith 18Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Closed loop gain at frequency :1
1
1 1
1
1;
1j
f
A jA j A j e
A j
1
11
1 11
jj
f jj
ee
A jee

Microelectronic Circuits - Fifth Edition Sedra/Smith 19Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Magnitude of the closed loop gain at frequency :1
1
1 1 1 1
1 1 1
jj
f j j j
eeA j
e e e
For a phase margin of 45
180 phase margin = 180 45 135

Microelectronic Circuits - Fifth Edition Sedra/Smith 20Copyright 2004 by Oxford University Press, Inc.
8.10.2 Effect of Phase Margin on Closed-Loop Response
Magnitude of the closed loop gain at frequency :1
1 135
1 1 1 1 1 1
0.76541 1f j j
A je e
1
1.31fA j
Thus the gain peaks at 131% of its value at low frequencies with a phase margin of 45.

Microelectronic Circuits - Fifth Edition Sedra/Smith 21Copyright 2004 by Oxford University Press, Inc.
Af (omega1) = factor / beta
0
2
4
6
8
10
12
14
0 50 100 150 200 250 300 350 400
phase margin, degrees
8.10.2 Effect of Phase Margin on Closed-Loop Response

Microelectronic Circuits - Fifth Edition Sedra/Smith 22Copyright 2004 by Oxford University Press, Inc.
Construct a Bode plot for rather than for .AA
10 1020log 20logdB
A A A
10 1020log 20logdB
A A
10 10
120log 20log
dBA A
8.10.3 An Alternative Approach for Investigating Stability (Bode)

Microelectronic Circuits - Fifth Edition Sedra/Smith 23Copyright 2004 by Oxford University Press, Inc.
Example:
5
5 6 7
10
1 10 1 10 1 10A
j f j f j f
1 5 1 6 1 7tan 10 tan 10 tan 10f f f
8.10.3 An Alternative Approach for Investigating Stability (Bode)

Microelectronic Circuits - Fifth Edition Sedra/Smith 24Copyright 2004 by Oxford University Press, Inc.
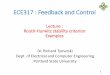
Figure 8.37 Stability analysis using Bode plot of |A|.
8.10.3 An Alternative Approach for Investigating Stability (Bode)8.10.3 An Alternative Approach for Investigating Stability (Bode)
50
60
85
1020log 1f dBA
55.62 10
31.00 10
33.15 10

Microelectronic Circuits - Fifth Edition Sedra/Smith 25Copyright 2004 by Oxford University Press, Inc.
8.10.3 An Alternative Approach for Investigating Stability (Bode)• Note that instability occurs for smaller
values of .
• Result that we will not prove:– If the horizontal line intersects
the curve on a segment for which the slope is –20 dB/decade, then the phase margin will be a minimum of 45º.
fA
1020log 1 1020log A

Microelectronic Circuits - Fifth Edition Sedra/Smith 26Copyright 2004 by Oxford University Press, Inc.
8.11 Frequency Compensation
• Frequency compensation modifies the open-loop transfer function of an amplifier (with three or more poles) so that the closed-loop transfer function is stable for any value chosen for the closed-loop gain.
A s
fA s

Microelectronic Circuits - Fifth Edition Sedra/Smith 27Copyright 2004 by Oxford University Press, Inc.
8.11 Frequency Compensation: Theory• The simplest method of frequency
compensation modifies the original open-loop transfer function, , by introducing a new low frequency pole at to form a new open-loop transfer function,
, which has a slope of –20 dB/decade at the intersection of the curve and the curve. 1020log 1
1020 log 'A j
A j
'A j
D

Microelectronic Circuits - Fifth Edition Sedra/Smith 28Copyright 2004 by Oxford University Press, Inc.
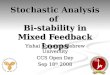
Figure 8.38 Frequency compensation for = 102. The response labeled A is obtained by introducing an additional pole at fD.
8.11 Frequency Compensation: Example:
Stability for closed-loop gains of 40 dB or higher by adding a new pole at .D

Microelectronic Circuits - Fifth Edition Sedra/Smith 29Copyright 2004 by Oxford University Press, Inc.
Figure 8.38 Frequency compensation for = 102. The response labeled A is obtained by introducing an additional pole at fD.
8.11 Frequency Compensation: Difficulty:
Stability achieved, but high open-loop gain, and hence the benefits of negative feedback, only for: 210f Hz

Microelectronic Circuits - Fifth Edition Sedra/Smith 30Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
The Miller effect allows shiftingto and shifting to a higher frequency. Stability and high open-loop gain for
1Pf
'Df2Pf
310f HzFigure 8.38 Frequency compensation for = 102. The response labeled A is obtained by introducing an additional pole at fD. The A response is obtained by moving the original low-frequency pole to f D.

Microelectronic Circuits - Fifth Edition Sedra/Smith 31Copyright 2004 by Oxford University Press, Inc.
Figure 8.40 (a) A gain stage in a multistage amplifier with a compensating capacitor connected in the feedback path and (b) an equivalent circuit. Note that although a BJT is shown, the analysis applies equally well to the MOSFET case.
8.11.3 Miller Compensation and Pole Splitting

Microelectronic Circuits - Fifth Edition Sedra/Smith 32Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
Node equations:
11
0Bi B f B C
VI s C V s C V V
R
22
0Cf C B m B C
Vs C V V g V s C V
R
B:
C:
Transresistance amplifier:

Microelectronic Circuits - Fifth Edition Sedra/Smith 33Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
Collect terms:
11
0Bi B f B C
VI s C V s C V V
R
22
0Cf C B m B C
Vs C V V g V s C V
R
B:
C:
11
1B f C f iV sC sC V sC I
R
22
10B f m C fV s C g V s C s C
R

Microelectronic Circuits - Fifth Edition Sedra/Smith 34Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
MATLAB: %Declare symbolic variables
syms s R1 R2 C1 C2 Cf gm Ii Vb Vc Vo A b x
%Define equations: Ax = b
A=[1/R1+s*(C1+Cf) -s*Cf; gm-s*Cf 1/R2+s*(Cf+C2)];
b=[Ii; 0];
%Solve the equations:
x=A\b;
Vo=x(2);
Vo=simplify(Vo)

Microelectronic Circuits - Fifth Edition Sedra/Smith 35Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
MATLAB:Vo = R1*Ii*R2*(-gm+s*Cf)/
(s*R1*Cf*R2*gm+1+s*R1*C1+s*R1*Cf+s*R2*Cf+s^2*R2*Cf*R1*C1+s*R2*C2+s^2*R2*C2*R1*C1+s^2*R2*C2*R1*Cf)
1 221 1 1 2 2 1 2 1 2 1 2 1 2 1 2
sC g R RV f moI s C R C R C g R R R R s C C C C C R Ri f m f
21 1 1 2 2 1 2 1 2 1 2 1 2 1 2D s s C R C R C g R R R R s C C C C C R Rf m f

Microelectronic Circuits - Fifth Edition Sedra/Smith 36Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
21 1 1 2 2 1 2 1 2 1 2 1 2 1 2D s s C R C R C g R R R R s C C C C C R Rf m f
(3 capacitors, 2 poles? Miller’s Theorem.)
21 1
1 1 1' ' ' ' ' '
1 2 1 2 1 2
s s sD s s
P P P P P P
Suppose one pole is dominant: ' '1 2P P
2
1' ' '
1 1 2
s sD s
P P P

Microelectronic Circuits - Fifth Edition Sedra/Smith 37Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
21 1 1 2 2 1 2 1 2 1 2 1 2 1 2D s s C R C R C g R R R R s C C C C C R Rf m f
By comparison:
2
1' ' '
1 1 2
s sD s
P P P
1'
11 1 2 2 1 2 1 2
P C R C R C g R R R Rf m
'ln ln1 1 1 2 2 1 2 1 2C R C R C g R R R RP f m
Prepare for logarithmic differentiation:

Microelectronic Circuits - Fifth Edition Sedra/Smith 38Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
'ln ln1 1 1 2 2 1 2 1 2C R C R C g R R R RP f m
Logarithmic differentiation:
'
1 1 2 1 21 0'
1 1 2 2 1 2 1 21
g R R R Rd mPdC C R C R C g R R R Rf f mP
Thus, , so the Miller capacitor lowers the frequency of the lower frequency pole.
'1
0d PdC f

Microelectronic Circuits - Fifth Edition Sedra/Smith 39Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole SplittingWhat about ?
By comparison:
'2P
21 1 1 2 2 1 2 1 2 1 2 1 2 1 2D s s C R C R C g R R R R s C C C C C R Rf m f
2
1' ' '
1 1 2
s sD s
P P P
11 2 1 2 1 2' '
1 2
C C C C C R RfP P
1'
2 '1 1 2 1 2 1 2
PC C C C C R RP f

Microelectronic Circuits - Fifth Edition Sedra/Smith 40Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
Prepare for logarithmic differentiation:
1'2 '
1 1 2 1 2 1 2P C C C C C R RP f
' 'ln ln ln ln2 1 1 2 1 2 1 2C C C C C R RP P f
' '
1 12 1 1 2' '
1 2 1 22 1
d d C CP PdC dC C C C C Cf f fP P
'
1 1 2 1 22 1 2'
1 2 1 21 1 2 2 1 2 1 22
g R R R Rd C CmPdC C C C C CC R C R C g R R R Rf ff mP

Microelectronic Circuits - Fifth Edition Sedra/Smith 41Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
'
1 1 2 1 22 1 2'
1 2 1 21 1 2 2 1 2 1 22
g R R R Rd C CmPdC C C C C CC R C R C g R R R Rf ff mP
'1 2 1 2 1 22
'1 2 1 21 1 2 2 1 2 1 22
C C g R R R R C C Cdf f m fPdC C C C C CC R C R C g R R R Rf ff mP
Note:
1 2 1 21
1 1 2 2 1 2 1 2
C g R R R Rf m
C R C R C g R R R Rf m
11 21
1 1 21 2 1 2 11 2
C C CfC CC C C C Cf
C C Cf

Microelectronic Circuits - Fifth Edition Sedra/Smith 42Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
'1 2 1 2 1 22
'1 2 1 21 1 2 2 1 2 1 22
C C g R R R R C C Cdf f m fPdC C C C C CC R C R C g R R R Rf ff mP
For the Miller effect to be large, :2g Rm
'1 22 1 0
'1 2 1 22
C C C Cdf fPdC C C C C Cf fP
'2 0
d PdC f

Microelectronic Circuits - Fifth Edition Sedra/Smith 43Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole Splitting
The Miller effect can split the two poles, pushing the frequency of the lower one lower and pushing the higher frequency higher.
Shifting the lower frequency pole gives stability without the addition of an extra pole.

Microelectronic Circuits - Fifth Edition Sedra/Smith 44Copyright 2004 by Oxford University Press, Inc.
8.11.3 Miller Compensation and Pole SplittingShifting the higher frequency pole shifts the – 20 dB/decade segment to the right and thus gives broader bandwidth.