Embed Size (px)
Citation preview

FAULT-TOLERANCE-ORIENTED TOPOLOGY, ROUTING AND WAVELENGTHASSIGNMENT OPTIMIZATION FOR WDM ALL-OPTICAL NETWORKS
By
DEXIANG WANG
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFDOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
2011

c⃝ 2011 Dexiang Wang
2

To my family
3

ACKNOWLEDGMENTS
All the works presented in this dissertation are under the guidance of my advisor Dr.
Janise McNair. Her wisdom, generosity, and encouraging smile have been supporting
me through one-after-another tough times that I encountered during this long process as
a Ph.D. pursuer. Hereby, although way far from sufficient, I want to express my sincere
gratefulness for every encouragement that she gave to me, every piece of guidance
that she offered me, and every step of progress that she helped me achieve. The spirits
that I learned from her in so many aspects of scholarship will be carried on and play a
priceless role throughout my future career.
I also want to thank all other members of my Ph.D. supervisory committee: Dr.
Alan George, Dr. Huikai Xie, and Dr. My Thai, for their academic advices and support
on my Ph.D. proposal and dissertation. I started my research under Dr. Alan George
on a green-internet project where I identified my interests of research in computer
networks. Dr. Huikai Xie shared his knowledge with me in fundamental principles of
fiber-optic communications, which formed my essential understanding in the area of
optical communication networks. Dr. My Thai brought me into the area of approximation
algorithms and optimization theory. The knowledge that I learned from her facilitated
solving many problems in this dissertation.
Along the entire way of producing this dissertation, I received numerous helps from
so many people at different times in different ways that there is no way to enumerate all
my thanks. Last but not least, my special thanks go to all the members of the Wireless
And Mobile Systems (WAM) Laboratory: Dr. Dawood Al-Ari, Arvindhan Kumar, Madhan
Sivakumar, Gustavo Vejarano, Xiaoyuan Li, Obulapathi Challa, Seshupriya Alluru,
Gunjan Gupta, Jing Qin, Xiang Mao, Jose Almodovar-Faria, JinJing Pan, Paul Muri,
Ritwik Dubey, Gokul Bhat, and Joey Makar, for so many beneficial discussions and
advices that they offered me on a daily basis.
4

TABLE OF CONTENTS
page
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.2 Dissertation Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 TORUS-BASED FOUR-WAY DISJOINT-LIGHTPATHS COMMUNICATIONFOR AVIONIC WDM LANS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Related Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1.1 Topological Options . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1.2 Fault Tolerance in WDM Optical Networks . . . . . . . . . . . . . . 182.1.3 Routing and Wavelength Assignment (RWA) . . . . . . . . . . . . . 19
2.2 Contributions and Chapter Organization . . . . . . . . . . . . . . . . . . . 202.3 Network Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 SAE Requirements and Evaluation Metrics . . . . . . . . . . . . . 202.3.2 Torus-Based Architecture . . . . . . . . . . . . . . . . . . . . . . . 212.3.3 Single-Wavelength Lightpaths . . . . . . . . . . . . . . . . . . . . . 22
2.4 Non-Overlapping Lightpath Setup Algorithm: Four-way OptimaL Disjointrouting (FOLD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.1 Scenario 1: X-Y Routing . . . . . . . . . . . . . . . . . . . . . . . . 252.4.2 Scenario 2: X Routing . . . . . . . . . . . . . . . . . . . . . . . . . 272.4.3 Scenario 3: Y Routing . . . . . . . . . . . . . . . . . . . . . . . . . 292.4.4 Destination Group . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.5 Wavelength Allocation and Reuse (WAR) . . . . . . . . . . . . . . . . . . 302.5.1 A Lower Bound (Ideal Wavelength Utilization) . . . . . . . . . . . . 302.5.2 Wavelength Allocation and Reuse (WAR) Algorithm . . . . . . . . . 32
2.6 Controller Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.7 Performance Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.7.1 Probabilistic Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 462.7.2 Network Capacity Analysis . . . . . . . . . . . . . . . . . . . . . . . 51
3 TRADEOFF STUDY ON FAULT TOLERANCE CAPACITY AND RESOURCEUTILIZATION FOR THE TORUS-BASED ALL-OPTICAL WDM LANS . . . . . 54
3.1 Wavelength Assignment Schemes . . . . . . . . . . . . . . . . . . . . . . 55
5

3.2 Failure Recovery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.3 Reliability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.4 Simulation and Numerical Results . . . . . . . . . . . . . . . . . . . . . . 61
4 CIRCULANT-GRAPH-BASED FAULT-TOLERANT ROUTING FOR ALL-OPTICALWDM LANS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.2 Fault-Tolerant Routing Algorithm . . . . . . . . . . . . . . . . . . . . . . . 67
4.2.1 Circulant Network Architecture . . . . . . . . . . . . . . . . . . . . 684.2.2 Node-Disjoint Lightpaths Setup . . . . . . . . . . . . . . . . . . . . 69
4.3 Network Resource Utilization . . . . . . . . . . . . . . . . . . . . . . . . . 744.4 Network Reliability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5 TOPOLOGICAL OPTIMIZATION FOR SPARE-SHARING-BASED WAVELENG-TH-ROUTED ALL-OPTICAL NETWORKS . . . . . . . . . . . . . . . . . . . . . 80
5.1 Spare-Sharing-Based Topological Optimization . . . . . . . . . . . . . . . 815.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.3 Contributions and Chapter Organization . . . . . . . . . . . . . . . . . . . 845.4 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.4.1 Matrix-Based Representation . . . . . . . . . . . . . . . . . . . . . 855.4.2 Integer Linear Program Formulation . . . . . . . . . . . . . . . . . 885.4.3 K-Shortest Disjoint Routing Based Formulation . . . . . . . . . . . 915.4.4 Problem Size Exemplification . . . . . . . . . . . . . . . . . . . . . 93
5.5 A Greedy Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.5.1 The Underlying Idea . . . . . . . . . . . . . . . . . . . . . . . . . . 945.5.2 Data Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.5.3 The Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.5.4 Performance Comparison . . . . . . . . . . . . . . . . . . . . . . . 975.5.5 Approximation Ratio Analysis for Working Paths Allocation under
Adequate Wavelength Provision . . . . . . . . . . . . . . . . . . . . 1005.5.6 Complexity and Memory Requirement Analysis . . . . . . . . . . . 101
5.6 Enhanced Heuristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.6.1 Drawbacks of the Greedy Approach . . . . . . . . . . . . . . . . . 1025.6.2 Two Initial Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . 1035.6.3 Solution Perfection (PER) . . . . . . . . . . . . . . . . . . . . . . . 106
5.7 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.7.1 Performance Comparison . . . . . . . . . . . . . . . . . . . . . . . 1075.7.2 Performance Indicator . . . . . . . . . . . . . . . . . . . . . . . . . 112
6 ORDERED-PATH-ENUMERATION-BASED CANDIDATE ROUTING: A FACILI-TATING APPROACH TO SOLVING RWA PROBLEMS FOR OPTICAL NET-WORKS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
6.1 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1176.2 Contributions and Chapter Organization . . . . . . . . . . . . . . . . . . . 118
6

6.3 Ordered Path Enumeration . . . . . . . . . . . . . . . . . . . . . . . . . . 1186.3.1 Definition of Terminologies . . . . . . . . . . . . . . . . . . . . . . . 1186.3.2 Theorems regarding Ordered Path Enumeration . . . . . . . . . . . 1196.3.3 The Ordered Path Enumeration Algorithm . . . . . . . . . . . . . . 1236.3.4 Container Cover Minimality Detection . . . . . . . . . . . . . . . . . 1236.3.5 Potential Algorithmic Advantages . . . . . . . . . . . . . . . . . . . 125
6.4 Application I: Wavelength Utilization Minimization for RWA with Shared--Path Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1256.4.1 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . 1266.4.2 Candidate Routing . . . . . . . . . . . . . . . . . . . . . . . . . . . 1266.4.3 Problem Formulations . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.4.3.1 Notations Used in Three Formulations . . . . . . . . . . . 1296.4.3.2 The Original Formulation . . . . . . . . . . . . . . . . . . 1306.4.3.3 k-Shortest Disjoint Routing Based Formulation . . . . . . 1326.4.3.4 Candidate Routing Based Formulation . . . . . . . . . . . 1336.4.3.5 Formulation Comparison . . . . . . . . . . . . . . . . . . 133
6.4.4 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 1356.5 Application II: Topological Optimization for Shared-Path Protection RWA . 136
6.5.1 Problem Description . . . . . . . . . . . . . . . . . . . . . . . . . . 1366.5.2 Candidate Routing . . . . . . . . . . . . . . . . . . . . . . . . . . . 1376.5.3 Problem Formulations . . . . . . . . . . . . . . . . . . . . . . . . . 138
6.5.3.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . 1386.5.3.2 The Original Formulation . . . . . . . . . . . . . . . . . . 1386.5.3.3 k-Shortest Disjoint Routing Based Formulation . . . . . . 1396.5.3.4 Candidate Routing Based Formulation . . . . . . . . . . . 1396.5.3.5 Formulation Comparison . . . . . . . . . . . . . . . . . . 140
6.5.4 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
7 CONCLUSIONS AND FUTURE WORK . . . . . . . . . . . . . . . . . . . . . . 142
7.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1427.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
APPENDIX
A OPTIMALITY PROOF OF THE PROPOSED NON-OVERLAPPING LIGHTPATHSSETUP ALGORITHM (FOLD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
B DERIVATION OF LS EXPRESSIONS . . . . . . . . . . . . . . . . . . . . . . . 151
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
7

LIST OF TABLES
Table page
2-1 Summary of LS,D expressions for different cases . . . . . . . . . . . . . . . . . 31
2-2 Summary of LS expressions for different N . . . . . . . . . . . . . . . . . . . . . 32
2-3 Summary ofWWAR expressions for different torus sizes . . . . . . . . . . . . . 44
2-4 Wavelength requirement for varied torus sizes . . . . . . . . . . . . . . . . . . 45
3-1 Spare wavelength requirements . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5-1 Basic notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5-2 Problem size exemplification: number of variables . . . . . . . . . . . . . . . . 93
5-3 Problem size exemplification: number of constraints . . . . . . . . . . . . . . . 94
5-4 Topological cost comparison among k-shortest path based ILP and the greedyapproach for a randomly generated network with 6 nodes and 6 wavelengthson each link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6-1 Problem size comparison among formulations: number of variables . . . . . . 134
6-2 Problem size comparison among formulations: number of constraints . . . . . 134
6-3 Route processing time comparison (in second, running on a Windows machinewith a 3GHz processor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6-4 Average candidate route disjointedness comparison (averaged over flows) . . . 135
8

LIST OF FIGURES
Figure page
2-1 A 4× 4 torus backbone connected via optical fibers . . . . . . . . . . . . . . . 22
2-2 General non-overlapping lightpath setup algorithm . . . . . . . . . . . . . . . . 24
2-3 Source-destination positional relationship . . . . . . . . . . . . . . . . . . . . . 24
2-4 Lightpaths setup for X-Y routing . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2-5 Case I’ lightpaths setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2-6 Case II’ lightpaths setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2-7 Summary of lightpaths setup cases in the destination group (N odd) . . . . . . 29
2-8 Summary of lightpaths setup cases in the destination group (N even) . . . . . 30
2-9 WAR demonstration for the 3× 3 torus . . . . . . . . . . . . . . . . . . . . . . . 33
2-10 WAR demonstration for the 4× 4 torus . . . . . . . . . . . . . . . . . . . . . . . 34
2-11 Grouping lightpaths . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2-12 Group mirroring lightpaths . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2-13 New lightpath setup cases with consideration of WAR (N is odd) . . . . . . . . 38
2-14 New lightpath setup cases with consideration of WAR (N is even) . . . . . . . . 39
2-15 WAR algorithm performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2-16 Reception structure of the controller . . . . . . . . . . . . . . . . . . . . . . . . 46
2-17 Network unreliability analysis for a 4× 4 torus . . . . . . . . . . . . . . . . . . . 49
2-18 TTUR distribution for a 4× 4 torus (f = 0.1) . . . . . . . . . . . . . . . . . . . . 49
2-19 Conditional probabilities of connection failures for a 4× 4 torus . . . . . . . . . 50
2-20 Effects of network failures on network capacity . . . . . . . . . . . . . . . . . . 52
2-21 Average capacity degradation comparison between the proposed 4-lightpathscommunication and single-lightpath communication . . . . . . . . . . . . . . . 53
3-1 Examples of 4 disjoint lightpaths setup between different S-D pairs in a 4 × 4torus (the lightpath in dark red is the working path and the three lightpaths inolive green are spare paths) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3-2 Wavelength assignment for two spare sharing schemes . . . . . . . . . . . . . 56
9

3-3 Total numbers of wavelengths required for four WA schemes . . . . . . . . . . 57
3-4 Lightpath state transition diagram for resource-shared WA schemes . . . . . . 58
3-5 An example of spare lightpath re-enabling in a 4× 4 torus . . . . . . . . . . . . 59
3-6 Connection unreliabilities in the 4× 4 torus . . . . . . . . . . . . . . . . . . . . 62
3-7 Conditional network unreliabilities in the 4× 4 torus . . . . . . . . . . . . . . . 63
3-8 Conditional network capacity in the 4× 4 torus . . . . . . . . . . . . . . . . . . 64
3-9 Conditional blocking/success rates in the 4× 4 torus . . . . . . . . . . . . . . . 65
4-1 Circulant-graph-based network architecture and examples of fault-tolerantrouting via establishing node-disjoint lightpaths . . . . . . . . . . . . . . . . . . 68
4-2 Fault-tolerant routing for destination nodes with modulo index difference fromthe source node byW , greater thanW , and smaller thanW . . . . . . . . . . 70
4-3 Last D node-disjoint lightpaths setup for Scenario I and II (the “last-stop” nodegroup and associated routing links are colored green) . . . . . . . . . . . . . . 72
4-4 Link utilization for different destinations with respect to variedW (N = 16) . . . 76
4-5 Wavelength requirement with respect to variedW for all-node simultaneouscommunication (N = 16) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4-6 Disconnection probability change with fL and fN (N = 16,W = 2,S = 0,D = 8) . 78
4-7 Disconnection probability change with fL for variedW (N = 16,S = 0,D = 8) . . 78
4-8 Disconnection probability distribution across the network (N = 16,W = 2,fL =0.1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5-1 Topological solutions without and with spare sharing . . . . . . . . . . . . . . . 81
5-2 Validity demonstration of spare sharing . . . . . . . . . . . . . . . . . . . . . . 82
5-3 Element value transition diagram for WAMW. . . . . . . . . . . . . . . . . . . . 96
5-4 Element value transition diagram for WAMB. . . . . . . . . . . . . . . . . . . . 96
5-5 Pseudo code of the greedy approach . . . . . . . . . . . . . . . . . . . . . . . 98
5-6 Solving process for the three ILP instances without reaching optimality afterrunning MOSEK for 8 hours . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5-7 Original greedy approach solution. . . . . . . . . . . . . . . . . . . . . . . . . . 103
5-8 Link potential based greedy search solution . . . . . . . . . . . . . . . . . . . . 104
10

5-9 Largest ratio first based search solution . . . . . . . . . . . . . . . . . . . . . . 107
5-10 Pseudo code of the perfection algorithm (PER) . . . . . . . . . . . . . . . . . . 108
5-11 Locations of 16 US major cities . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5-12 Performance improvements from greedy solutions due to heuristic algorithmsfor varied wavelength provisions . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5-13 Convergence process of the perfection algorithm taking three different initialsolutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5-14 Weighted wavelength/link utilization for working and backup lightpaths in theLRF+PER induced topological solutions . . . . . . . . . . . . . . . . . . . . . . 111
5-15 Solution performance indication for the network with 5 wavelengths provision . 113
5-16 Weighted wavelength utilization / average bending factor distribution for variedtopological solutions in the networks with 5, 10, 15, 20, and 25 wavelengthsprovision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6-1 Pseudo code of the ordered path enumeration algorithm . . . . . . . . . . . . . 124
6-2 NSF network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6-3 Pseudo code of the candidate routing scheme . . . . . . . . . . . . . . . . . . 128
6-4 Solution optimality comparison between k-shortest disjoint routing and 3-can-didate routing after running MOSEK for 8 hours . . . . . . . . . . . . . . . . . . 136
6-5 Solution optimality comparison between k-shortest disjoint routing and 4-can-didate routing after running MOSEK for 8 hours . . . . . . . . . . . . . . . . . . 136
6-6 Solution performance comparison between k-shortest disjoint routing and 4-can-didate routing after running MOSEK for 8 hours . . . . . . . . . . . . . . . . . . 141
6-7 Solution performance comparison between k-shortest disjoint routing and 5-can-didate routing after running MOSEK for 8 hours . . . . . . . . . . . . . . . . . . 141
A-1 Non-optimality demonstration for a greedy disjoint routing solution . . . . . . . 146
A-2 Path augmentation based 2-shortest disjoint routing . . . . . . . . . . . . . . . 147
A-3 “Progressive” and “regressive” links . . . . . . . . . . . . . . . . . . . . . . . . 148
11

Abstract of Dissertation Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of theRequirements for the Degree of Doctor of Philosophy
FAULT-TOLERANCE-ORIENTED TOPOLOGY, ROUTING AND WAVELENGTHASSIGNMENT OPTIMIZATION FOR WDM ALL-OPTICAL NETWORKS
By
Dexiang Wang
December 2011
Chair: Janise Y. McNairMajor: Electrical and Computer Engineering
Wavelength-routed all-optical communication technologies have immense
potential to become a qualified solution to next-generation communication networks
satisfying both long-haul networking and special local communication requirements,
as in avionic communication systems, due to its efficient one-shot data delivery, wide
bandwidth provision, magneto-electrical interference resistance, light-weight signal
carrying medium (fibers), etc. However, fiber optic components are susceptible to a
range of operating faults, such as stability issues in both mechanical placements and
electro-optic operations, especially under hazardous operating conditions. Therefore,
it becomes more than desirable to propose efficient fault-tolerant network architectures
and protocols to meet varied fault-tolerance requirements under certain resource
provision limits.
This dissertation is dedicated to studying optimal resource (in form of wavelengths
and optical links) allocation problems in designing different types of fault-tolerant
Wavelength Division Multiplexing (WDM) network architectures and then searching
for best solutions. A range of classic topologies, such as torus and circulant graphs,
are studied on which optimal fault-tolerant routing algorithms are developed. The
Wavelength Assignment (WA) problem is investigated in depth and a Wavelength
Allocation and Reuse (WAR) algorithm for the two-dimensional N × N torus of arbitrary
sizes is developed which performs close to the best possible solution (lower bound).
12

Spare sharing technology, in favor of reducing redundant resource utilization, is also
studied in fault-tolerant architecture design and different levels of spare sharing are
proposed on the torus topology to evaluate the tradeoff between network connection
reliability and resource utilization. Circulant graph, featuring scalable network sizes and
flexible connectivity, is exploited and a node-disjoint routing algorithm for arbitrary sizes
and connectivity degrees of the circulant graph is proposed to facilitate the multi-level
fault-tolerant implementation of all-optical Local Area Networks (LANs).
From another perspective of fault-tolerant WDM architecture design, topological
optimization under certain resource provision constraints is studied, in which a
number of Integer Linear Programs (ILPs) are developed to model the problem in
varied granularities. Based on the drawbacks analysis of the greedy approach, a
two-phase heuristic algorithm is proposed that jointly considers the routing and
wavelength assignment problems. Numerical simulations show that the proposed
heuristic algorithm performs much better than the traditional method for the Routing
and Wavelength Assignment (RWA) problems in which the routing and wavelength
assignment are treated consecutively in a separate fashion.
This dissertation also touches upon a fundamental problem: ordered path
enumeration (or k-shortest path enumeration). Based on a series of graph-theoretical
derivation, a new ordered path enumeration algorithm is proposed to help form a
pool of possible paths for the flow requests. Then a problem-aware candidate routing
scheme is developed to select candidate routes from the pool of enumerated paths.
This ordered-path-enumeration-based candidate routing method is examined on two
shared-path-protection RWA problems and the numerical results indicate its great
performance advantage over the traditional k-shortest disjoint routing based method.
13

CHAPTER 1INTRODUCTION
In this chapter, the motivation of investigating the fault-tolerance-oriented resource
allocation optimization problems in the context of WDM all-optical networks is presented.
Then the organization of this dissertation follows.
1.1 Motivation
The technological advance in the area of fiber optic communication especially on
optical switching techniques makes it possible to design WDM all-optical networks that
eliminate all intermediate Optical-Electrical-Optical (OEO) conversions and queuing
process such that the data can be delivered from its source to its destination in a
one-shot fashion [6, 13, 19, 48]. Together with the traditional bandwidth advantage of the
optical networks, all-optical networks enable design of a next-generation communication
architecture that is targeted to satisfy many time-critical and bandwidth-demanding
applications.
Due to many advantages that WDM optical networks can provide, besides
their use in traditional long-haul communication networks, they are expanding their
applications into many other fields where other types of communication technologies
were being used. For example, US NAVY is trying to establish new Society of
Automotive Engineering (SAE) standards for fiber-optic-networks-based avionic onboard
communication systems that were operating via traditional copper-based electrical
communication [29, 39, 44, 45, 63]. The new fiber optic communication based network
design can greatly help lower equipment Size, Weight and Power (SWaP) [11], improve
magneto-electrical interference resistance and provide a much higher communication
bandwidth [18, 43].
Although the wavelength-routed all-optical networks open up a range of
opportunities for applying all-optical technologies to next-generation network design,
it is still not easy to reach an optimal design solution without deep understanding on
14

resource allocation problems due to the challenge from the limited wavelength resource
and wavelength-dependent implementation cost in the switching fabrics.
In addition, the solutions to modern communication networks are facing stronger
and stronger fault tolerance requirements especially for those applications with stringent
time limit of data delivery under harsh environmental conditions or the risk of disasters
[3, 18].
Therefore, resource-utilization-efficient design solutions that also have to satisfy the
fault tolerance requirements are needed in developing qualified all-optical architectures,
routing and failure recovery protocols, and wavelength assignment algorithms.
This dissertation is dedicated to exploiting efficient ways to address those design
challenges via a comprehensive study on routing, wavelength allocation and topological
optimization under a variety of fault tolerance demands.
1.2 Dissertation Organization
This dissertation is organized into 7 chapters. The motivation of investigating
routing, wavelength assignment, and topology optimization problems in all-optical
WDM networks is presented in this chapter. Through Chapters 2 to 6, the focuses
of discussion are moved to solving above resource-allocation-related problems, for
various applications, in great detail. Chapter 7 concludes this dissertation by highlighting
findings, contributions, and future research goals on this very topic of the dissertation.
The main body of this dissertation is as follows.
Chapter 2 is centered around the torus topology focusing on developing the
Four-way Optimal Link-Disjoint routing algorithm (FOLD) and the Wavelength
Allocation and Reuse (WAR) algorithm in order to enable a fault-tolerant all-terminal
communication architecture with the minimum wavelength requirement for the
next-generation avionic onboard communication systems.
Chapter 3 proposes four wavelength assignment schemes for the 3 redundant
lightpaths (spare lightpaths) out of the 4 link-disjoint paths developed in Chapter
15

2. A enhanced failure recovery algorithm is proposed to facilitate communication
switches upon failure occurrence. A tradeoff between spare resource allocation and fault
tolerance performance is discerned via an exhaustive simulation over a 4× 4 torus.
Chapter 4 studies the fault-tolerance potential of the circulant graphs via exploiting
node-disjoint routing in a circulant graph of an arbitrary size and connectivity degree.
A node-disjoint routing algorithm that fully leverages the circulant graph connectivity is
proposed for all possible source and destination positions.
In Chapter 5, a spare-sharing-based topological optimization problem is identified
and addressed, which targets to find a low-cost topological solution to adapt the network
topology over the disastrous network attacks (earthquakes, hurricanes, floods, etc.)
The problem is formulated in different forms of Integer Linear Programs (ILPs) and it
is shown that the traditional routing and wavelength assignment decomposition based
method does not perform well for this problem. A two-phase heuristic algorithm, based
on drawback analysis of the greedy approach, is proposed and simulation results
demonstrates its performance and computational advantages over the traditional
methods that are used for solving the RWA-related problems.
In Chapter 6, a new ordered path enumeration algorithm is formally proposed along
the way of a series of theoretical derivations. Based on the pool of enumerated paths,
a candidate routing scheme is developed to identify a set of candidate routes for each
flow request that fit specific problems’ nature. Finally, two shared-path-protection-based
RWA problems are tested and numerical results show great performance advantages
of the ordered-path-enumeration-based candidate routing over the traditional k-shortest
disjoint routing based method.
16

CHAPTER 2TORUS-BASED FOUR-WAY DISJOINT-LIGHTPATHS COMMUNICATION FOR
AVIONIC WDM LANS
Optical Networking with Wavelength Division Multiplexing (WDM) has immense
potential to satisfy the future needs of both military and commercial communication
systems, due to its high bandwidth provision, low electromagnetic interference, and light
weight [24]. In recent years, there has been an interest in replacing copper with optical
fiber in avionic systems. However, fiber optic components are susceptible to faults
due to their operational uncertainty. In addition, hazardous working conditions make
time-critical communication even vulnerable [18]. The Society of Automobile Engineers
(SAE) has specified various design Requirements for Optical Networks in Avionic
(RONIA) onboard communication, which are briefly listed in Section 2.3. Therefore,
there is a need to design appropriate communication network architectures that are able
to offer both fault tolerance and efficient data delivery to leverage the advantageous
features of WDM technologies.
In this chapter, we focus on the requirements of communication latency and fault
tolerance. We propose setting up multiple (4) non-overlapping1 lightpaths on the torus
toplogy to enable both one-shot data transimission and lightpath-switching-based
failure recovery controlled purely on the receiver side. We first develop an efficient
non-overlapping lightpaths setup algorithm (called FOLD (Four-way OptimaL Disjoint
routing)) and prove its optimality in terms of optical link resource utilization. Then, based
on FOLD, a wavelength allocation and reuse (WAR) scheme enforcing wavelength
continuity is proposed to minimize the wavelength utilization for all-to-all communication.
1 In this chapter, the lightpaths are non-overlapping as long as they are link-disjoint.
17

2.1 Related Works
2.1.1 Topological Options
Regarding the topological choice in avionic network architecture design, various
optical architectures that encompass a wide range of topologies and routing protocols
have been proposed in [43]. However, most of them do not provide the high-level
connectedness, which is required to achieve high-level fault tolerance [61]. Physically
based on a torus topology, [66] develops different types of logical topologies using a
k-hop routing model. [64] and [51] discuss the routing and wavelength allocation (RWA)
problems under the ring topology. However, these papers provide very limited or no
support against network failures. In [60], we propose a preliminary non-overlapping
four-lightpaths setup algorithm on the torus structure. However, that work does not detail
routing and wavelength allocation for tori of arbitrary sizes, which will be fully addressed
in this chapter.
2.1.2 Fault Tolerance in WDM Optical Networks
With respect to fault-tolerance-oriented studies for WDM optical networks, [41]
provides a comprehensive classification of general mesh-network-based fault-tolerant
technologies. It concludes that path-based protection outperforms link-based protection
in terms of resource utilization, and that dedicated-path protection outperforms
shared-path protection in terms of connection reliability however with the cost of
higher resource utilization. [53] discusses the capacity provisioning bounds for one
failure recovery in torus-based networks and develops both link-based and path-based
restoration strategies. Actually, all restoration-based strategies require non-negligible
processing time on fault detection and resource reallocation. Therefore they may not
meet the requirements of time-critical communication, as of avionic communication.
[62] raises the idea of lightpath diversity to enable a much faster failure response, in
which the source delivers multiple copies of data to the destination by splitting the
light onto multiple independent lightpaths. However, it does not discuss any lightpath
18

setup algorithms based on concrete topologies. Moreover, since the replacement of
the failed links is almost impossible during missions of flight, and more than one failure
can happen during a short period especially under hazardous operating conditions, all
“1+1”-based or ”1:1”-based2 protections that are well-studied in the literature as in [41],
[21] and [37] may not fit the fault-tolerant needs of avionic communication. Therefore, a
dedicated multi-path protection design, as proposed in this chapter, becomes desirable.
2.1.3 Routing and Wavelength Assignment (RWA)
Concerning routing and wavelength assignment (RWA) algorithms, [67] provides
a general integer linear program (ILP) formulation for the RWA problems and offers
solutions by decoupling the problem into the routing (R) part and wavelength assignment
(WA) part. [26] and [9] propose an RWA algorithm for single-lightpath all-to-all
communication under the torus topology. It achieves optimal wavelength utilization
(demanding N3/8 wavelengths) for a 2-dimensional torus when the one-dimensional size
of the torus, N, is even. It is also shown in [47] that, for an odd N in the 2-dimensional
torus, there exists an optimal RWA scheme requiring N(N2 − 1)/8 wavelengths. Due to
the routing complexity of 4-lightpath setup for any communication pair under the torus
topology, the RWA problem become much harder and it is the focus of this chapter.
[31] discerns the tradeoff of data delivery efficiency and wavelength utilization between
the one-shot all-optical architecture and the multi-hop optical/electrical architecture.
It offers a general multi-hop routing algorithm pursuing balance between fast delivery
and wavelength utilization. [46] develops on-line RWA algorithms for bidirectional ring
and torus architectures, which attempts to minimize average blocking probability for
a new traffic session given a fixed number of wavelengths. However, the algorithm is
2 In the literature, “1+1” refers to the protection scheme consisting of two dedicated lightpaths for eachprotected flow, whereas “1:1” corresponds to the protection scheme in which the secondary (backup) light-path can be used for low-priority traffic transmission until a failure along the primary (working) lightpathoccurs [35] [14].
19

centralized in nature and requires correct knowledge of the instantaneous RWA over the
entire network. Hence it is not suitable for distributed network implementation.
2.2 Contributions and Chapter Organization
In this chapter, we apply the idea of redundant lightpaths, as in [62], to protect the
network against failures and to achieve fast failure recovery and zero data loss. Because
of its connectivity richness and symmetry, the torus topology is explored. The former
one is used to develop disjoint lightpaths and the latter one is explored when developing
the WAR algorithm.
The major contributions of this chapter include: 1. A torus-based 3-critical-fault-free
WDM backbone architecture that can satisfy requirements of both data delivery
effectiveness and high-level fault tolerance. 2. An optimal 4-lightpaths setup algorithm
(called FOLD) with efficient wavelength allocation and reuse for all-to-all communication
in an arbitrary N × N torus. 3. A comprehensive probabilistic and network capacity
analysis for fault tolerance performance demonstration.
The rest of this chapter is organized as follows: Section 2.3 defines the network
architecture. Section 2.4 describes the non-overlapping lightpaths setup algorithm.
Section 2.5 discusses WAR for all-to-all communication. The controller implementation
is described in Section 2.6. Section 2.7 provides the fault tolerance performance
analysis of the proposed architecture and summarizes this chapter.
2.3 Network Architecture
2.3.1 SAE Requirements and Evaluation Metrics
The SAE design requirements for optical avionic communication systems are
specified briefly as follows [23, 24]:
• Transparency and High Bandwidth - the WDM LANs are expected to supportsvariety of signal protocols for both legacy and new applications without anycompatibility issue
• Scalable and Secure - scalable and reconfigurable systems with potentialMulti-Level Security (MLS) support
20

• Flexible Networking - WDM LANs can be operated with simple control &management to enable ease of use and ease of future network capacity upgrade
• Fault Tolerant - reliability provision by redundancy and diversity
• Reduce Size, Weight and Power (SWaP) - compact, low power and low cost WDMsystems
The focus of this work is primarily on the fault tolerance requirements of SAE
specification, for which we propose a torus-based multi-lightpath architecture with ability
to tolerate up to 3 critical fiber link failures.
Along with the SAE requirements for avionic WDM LANs, there are a set of metrics
for practical or performance evaluation of the proposed architecture design.
• Recovery Speed. Our work applies dedicated redundant lightpaths protection andhence failure recovery is based on switching reception among disjoint lightpaths,which leads to very fast recovery.
• Reconfiguration (after failure). In our work, no reconfiguration is needed duringfailure recovery because all dedicated lightpaths are set up in advance in thedesign phase and no switching logic needs to be reconfigured.
• Latency. Latency is negligible in our case, because lightpath communicationeliminates Optical-Electrical-Optical (OEO) conversion and queuing process alongthe data delivery path.
• Capacity of Fault Tolerance. Up to 3 critical link failures are supported due to the 4non-overlapping lightpaths setup proposed in this work.
• Size, Weight and Power (SWaP). Our work is expected to be much morecapacity/size-, capacity/weight-, and capacity/power-efficient than the traditionalcopper wiring based avionic systems due to the weight advantage of the fibers andrecent technological advance in optical switching device [11].
2.3.2 Torus-Based Architecture
Due to the advantages mentioned above, the torus is explored as the basic
backbone topology, on which all follow-on architectural and protocol designs are based.
21

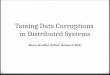
Without loss of generality, take the 4 × 4 torus as an example. 16 controllers3 , as
shown in Figure 2-1, are connected via optical fibers carrying WDM signals in a circular
fashion in both row (or X) and column (or Y) directions. Neighboring controllers are
bridged via two unidirectional fibers (Figure 2-1 only shows the connection instead of
two separate links) in order to allow for bidirectional communications. Each controller
has 4 input/output ports connecting 4 neighbors from the east, south, west and north
directions respectively. 11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
Figure 2-1. A 4× 4 torus backbone connected via optical fibers
2.3.3 Single-Wavelength Lightpaths
Time-critical communication has requirements of minimum queuing and
transmission delay, as well as reliable protection against network faults, all of which
require multiple lightpaths to be set up between each source-destination (S-D)
pair. Depending on whether wavelength converters are used in the controllers, a
lightpath can either take on a single wavelength or multiple wavelengths on different
links along the path. The use of wavelength converters can lead to better routing
flexibility and eventually better wavelength utilization, but it also results in extra
3 Here we use ”controller” instead of ”node” because the architecture discussed in this chapter is de-signed for backbone use. Different types of second-tier networks may be connected to the backbone viathe ”controller”.
22

considerable photoelectric device cost. Current optical technologies either rely on
optical-electrical-optical (OEO) conversion or semiconductor optical amplifier (SOA) to
implement wavelength conversion [40]. The former technology introduces OEO delay
while the latter one is still facing stability issues and some operational constraints. In this
work, we enforce single wavelength allocation on a lightpath, which leads to a low-cost
controller design. However, as a result, the design difficulty is moved from the hardware
level to the routing and wavelength allocation level. Next, we describe the lightpaths
setup algorithm to establish four non-overlapping lightpaths for all S-D pairs in an N × N
torus, which enables the network to tolerate at least three critical link failures.
2.4 Non-Overlapping Lightpath Setup Algorithm: Four-way OptimaL Disjointrouting (FOLD)
Assume the optical links fail in an independent fashion with a failure probability f .
The normal operation probability p is thereby 1 − f . Then, given that the four lightpaths
are link-disjoint, the probability of an S-D pair being disconnected is calculated by
Pdisconnection = [1− (1− f )l1][1− (1− f )l2][1− (1− f )l2][1− (1− f )l2]
= (1− pl1)(1− pl2)(1− pl3)(1− pl4),(2–1)
where l1, l2, l3 and l4 denote the lengths of the four non-overlapping lightpaths in number
of hops.
From equation (2–1) we observe that shorter-length lightpaths can lead to a
lower disconnection probability. Besides, from the perspective of resource utilization,
a lightpaths setup that requires the lower number of optical links leads to the lighter
link utilization. Since both of the above design concerns agree on developing short
lightpaths, we propose a greedy approach to set up the four non-overlapping lightpaths.
The general description of the algorithm is listed in Figure 2-2.
Since the network architecture includes two opposite unidirectional optical links for
each one-hop connection, the reverse lightpaths setup from the destination to the source
23

Algorithm1. Initialization: keep all the optical links in the torus structure, S ← Φ, i ← 1 (S is the
lightpath set and i is the iteration indicator of the algorithm)2. While i ≤ 4, do 3:3. Find the shortest path, Path(i), from the source to the destination in the current
torus structure, S ← S ∪ Path(i), remove all the links in Path(i) from the torusstructure, i ← i + 1, go to 2
4. Output S
Figure 2-2. General non-overlapping lightpath setup algorithm
can be obtained by reversing the lightpaths setup from the source to the destination. As
such, the lightpaths setup algorithm works for bi-directional communication.
S
D
dX
d Y
N
Figure 2-3. Source-destination positional relationship
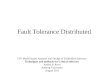
In order to specify in detail how the algorithm works for the torus topology, we first
introduce several notations. As shown in Figure 2-3, dX and dY are the horizontal and
vertical distances from a source to a destination, and N is the one-dimensional size of
the torus topology. If the source and the destination are located in the different rows and
different columns, we call the routing X-Y routing (Scenario 1). If they are in the same
row, we call the routing X routing (Scenario 2), and if they are in the same column, we
call the routing Y routing (Scenario 3).
24

2.4.1 Scenario 1: X-Y Routing
Use the traditional shortest X-Y routing to find the first lightpath of the length
dX + dY , then use the traditional shortest Y-X routing to find the second lightpath of
the length dY + dX . The rules for the first and second lightpaths setup are the same
regardless of relative S-D positions and the torus size. However, depending on the
magnitude relation among dX , dY and N, the rule of developing the third and fourth
lightpaths varies. We illustrate all four cases in Figure 2-4 and describe them below in
terms of setting up the third and fourth lightpaths.
S1
S2 S
D D1
D2
A Case I
S
D
B Case II
S1 S2
S
D
D2 D1
C Case III
S1 S
S2 D2
D D1
D Case IV
Figure 2-4. Lightpaths setup for X-Y routing
25

Case I (Figure 2-4(A)): 1 ≤ dX ≤ ⌊(N−4)/2⌋ and 1 ≤ dY ≤ ⌊(N−4)/2⌋. Move from
the source vertically and horizontally by one hop along the opposite directions of the
second and first lighpaths, respectively, to the neighbor controllers S1 and S2, then move
from the destination horizontally and vertically by one hop along the same directions of
the second and first lightpaths to the neighbor controllers D1 and D2, then route S1 to D1
using shortest X-Y routing and S2 to D2 using shortest Y-X routing to obtain the third and
fourth lightpaths of the same length dX + dY + 4.
Case II (Figure 2-4(B)): dX > ⌊(N − 4)/2⌋ and dY > ⌊(N − 4)/2⌋. Move from the
source horizontally along the opposite direction of the first lightpath until the controller
in the column next to that of the destination is reached. Then move vertically using
shortest Y routing to the controller right next to the destination. Close the route by the
last hop to form a lightpath of the length N − dX + dY . Similarly, move from the source
vertically along the opposite direction of the second lightpath until the controller in the
row next to that of the destination is reached, then move horizontally using shortest X
routing to the controller right next to the destination, and close the route by the last hop
to form another lightpath of the length N − dY + dX . The third lightpath is the shorter
one while the fourth lightpath is the longer one of these two lightpaths, depending on
magnitude of dX and dY .
Case III (Figure 2-4(C)): dX > ⌊(N − 4)/2⌋ and 1 ≤ dY ≤ ⌊(N − 4)/2⌋. Use
the technique for routing the first lightpath in case II to form the third lightpath of length
N − dX + dY . For the fourth lightpath, move from the source vertically by one hop along
the opposite direction of the second lightpath to its neighbor S1, then go horizontally
by one hop along the shortest X routing direction to S2. Make a vertical turn and route
along the shortest Y routing direction over the row of the destination by one hop to D2.
Switch the route into horizontal direction along the shortest X routing direction to the
neighbor of the destination D1, and finally close the route by the last one hop to the
destination with the lightpath length dX + dY + 4.
26

Case IV (Figure 2-4(D)): 1 ≤ dX ≤ ⌊(N − 4)/2⌋ and dY > ⌊(N − 4)/2⌋. Use the
technique for routing the second lightpath in case II to form the third lightpath of length
N − dY + dX . For the fourth lightpath, move from the source horizontally by one hop
along the opposite direction of the first lightpath to its neighbor S1. Go vertically by one
hop along the shortest Y routing direction to S2. Make a vertical turn and route along the
shortest X routing direction over the column of the destination by one hop to D2. Switch
the route into the vertical direction along the shortest Y routing direction to the neighbor
the destination D1. Finally, close the route by the last one hop to the destination with the
lightpath length dX + dY + 4.
2.4.2 Scenario 2: X Routing
Use the traditional shortest X routing to find the first lightpath with length dX . The
rule of setting up the first lightpath is the same for all cases in Scenario 2 regardless of
relationship between dX and N. However, the setup is different for the second, third and
fourth lightpaths as described below. S4 D4
S1 D1
S3 S D S3
S2 D2
Figure 2-5. Case I’ lightpaths setup
27

Case I’ (Figure 2-5): 1 ≤ dX ≤ ⌊(N − 8)/2⌋. Move from the source vertically
by one hop towards the north to S1, route along the shortest X routing direction to the
north neighbor of the destination D1, and close by the last hop the route with length
dX + 2 to form the second lightpath. Route the path symmetrically towards the south to
form the third lightpath with the length dX + 2. We call these two paths mirroring paths.
Finally, move from the source along the opposite direction of the first lightpath by one
hop to the neighbor S3, turn to the north by two hops to S4, switch into the horizontal
direction along the shortest X routing direction over the column of the destination by one
hop to D4, and then turn to the south and move by two hops to the east neighbor of the
destination D3. Close the route by the last hop to form the fourth lightpath with the length
dX + 8.
S D
Figure 2-6. Case II’ lightpaths setup
Case II’ (Figure 2-6): dX > ⌊(N − 8)/2⌋. Use the technique above to form the two
symmetrical lightpaths of the length dX + 2. Then move from the source horizontally
along the opposite direction of the first lightpath to the destination to form another
lightpath of the length N − dX . We call this path the complementary path. If dX + 2 is
28

smaller than N − dX , the first two lightpaths of the length dX + 2 are the second and third
lightpaths and the one of the length N − dX is the fourth lightpath. Otherwise, the order
is reversed accordingly.
2.4.3 Scenario 3: Y Routing
This is exactly the mirrored scenario of Scenario 2 except the main routing direction
is the Y direction and dX is replaced with dY . Corresponding to Cases I’ and II’, we
introduce Cases I” and II” for this scenario (routing is not shown).
Theorem 2.1. The above 4-way non-overlapping lightpaths setup reaches optimal
link-disjoint routing in terms of the total number of links used.
Proof: See Appendix A for proof. dX=(N-1)/2
dy =
(N-5)/2
dy =
(N-1)/2
Case I’ Case II’
S D D D D
D D D D D D D D
D
D D D D D D D D D
D D D D D D D D D
D D D D D D D D D
Case I Case I
dX=(N-1)/2
dX=(N-3)/2
dX=(N-7)/2
Case III
Case II
Case IV
Case IV Case II
Case III
Case I’’
Case II’’
Figure 2-7. Summary of lightpaths setup cases in the destination group (N odd)
2.4.4 Destination Group
We define a destination group with respect to a source as a group of destinations,
as shown in Figures 2-7 and 2-8, which uniquely contribute to the complete set of S-D
combinations, of cardinality N2(N2−1)/2, in an N×N torus. All the lightpath setup cases
can be summarized into the destination group. According to the relationship among dX ,
dY and N, the destination group can be partitioned into subgroups corresponding to
Cases I, II, III, IV, I’, II’, I” and II” as shown in the dashed line surrounded areas in Figure
2-7 and Figure 2-8.
29

S D D D D
D D D D D D D
D
D D D D D D D D
D D D D D D D D
D D D D D
Case I Case I
dX=N/2
dX=N/2-1
dX=N/2-3 dX=N/2-1
Case II Case II
Case III Case III
Case IV
Case IV
Case I’ Case II’
Case I’’
Case II’’
dy =
N/2-2
dy =
N/2
Figure 2-8. Summary of lightpaths setup cases in the destination group (N even)
In the next section, we propose a wavelength allocation and reuse scheme for torus
all-to-all 4-way communications with a target to minimize wavelength utilization.
2.5 Wavelength Allocation and Reuse (WAR)
A naive way to allocate wavelengths is to assign a separate wavelength to each S-D
pair, such that the four non-overlapping lightpaths for one S-D pair take on the same
wavelength. As a result, the number of wavelengths required for all S-D communications
is given by the number of S-D pairs of a torus of size N × N:
Wnaive =N2(N2 − 1)
2. (2–2)
However, the four non-overlapping lightpaths are not necessarily associated with the
same wavelength. An efficient wavelength allocation algorithm can allow reuse of the
same wavelength on multiple lightpaths of different S-D pairs, with the goal of achieving
better wavelength utilization.
We define link wavelength (LW) as the wavelength associated with a specific optical
link. An LW is identified by both the link index and the associated wavelength.
2.5.1 A Lower Bound (Ideal Wavelength Utilization)
We first calculate a lower bound, i.e. the lowest possible number of wavelengths
required when all lightpaths for all S-D pairs are set up and no link wavelength is left idle.
30

This lower bound can be expressed as
WLower bound =Lall−to−all2N2
, (2–3)
where Lall−to−all is the total number of LWs required for all-to-all communication using
the optimal lightpaths setup algorithm proposed in Section 2.4, and 2N2 is the number of
LWs that one wavelength can provide throughout an N × N torus.
Table 2-1. Summary of LS,D expressions for different casesLS,D ExpressionsLS,D(I ) 4(dX + dY + 2)LS,D(II ) 2(N + dX + dY )LS,D(III ) N + 2(2dY + dX + 2)LS,D(IV ) N + 2(2dX + dY + 2)LS,D(I ′) 4(dX + 3)
LS,D(II ′) N + 2(dX + 2)
LS,D(I ′′) 4(dY + 3)
LS,D(II ′′) N + 2(dY + 2)
We define the total number of LWs required for an S-D pair as LS,D , which includes
the total number of hops on the four lightpaths of the S-D pair. Table 2-1 provides a
summary of LS,D expressions derived based on the proposed non-overlapping lightpaths
setup algorithm (FOLD), with respect to different cases of the source and the destination
locations. Then Lall−to−all can be calculated as
Lall−to−all =∑S,D
LS,D = N2 × LS , (2–4)
where LS is the number of LWs required for a specific source to set up the 4-lightpath
connections to all the destinations in its destination group (see Figures 2-7 and 2-8).
N2 × LS makes the equality hold due to the symmetric characteristic of the torus
structure, which puts an even position to all the sources regardless of their positions in
the torus structure. The calculation of LS is:
LS =∑D
LS,D , (2–5)
31

where the expressions of LS with respect to various ranges and parities of N are listed in
Table 2-2. The detailed derivation of those expressions is provided in Appendix B.
Table 2-2. Summary of LS expressions for different NLS ExpressionsLS (2 ≤ N ≤ 5, N is odd) (3N3 − 2N2 + 7N − 8)/2LS (2 ≤ N ≤ 5, N is even) (3N3 − 2N2 + 8N − 8)/2LS (6 ≤ N ≤ 9, N is odd) (2N3 + 9N2 − 28N + 17)/2LS (6 ≤ N ≤ 9, N is even) (2N3 + 9N2 − 26N + 16)/2LS (N ≥ 10, N is odd) (N3 + 4N2 − 5N − 32)/2LS (N ≥ 10, N is even) (N3 + 4N2 − 4N − 32)/2
After calculating LS , we can use equations (2–3) and (2–4) to calculateWLower bound
for an N × N torus.
We note that due to the structural symmetry of the N × N torus, all the links have
the same set of positional relations to each controller in the network. In addition, all
the controllers have the same lightpath setup scheme. Therefore, the total number
of lightpaths arranged on each link is the same throughout the whole network, which
means that the number of wavelengths required for the wavelength-convertible torus
network is alsoWLower bound .
Next, we show how the wavelengths, for different torus sizes, are assigned to all the
lightpaths to which wavelength continuity is enforced.
2.5.2 Wavelength Allocation and Reuse (WAR) Algorithm
In order to minimize wavelength utilization and however to maintain wavelength
continuity on all the lightpaths, we need to find the best lightpaths arrangement on each
wavelength, which leads to the best resource utilization. The following discussion is
organized in the order of increasing torus sizes.
N = 2: Wavelength allocation for the 2 × 2 torus is trivial, i.e., the naive way
to allocate the wavelengths described at the beginning of this section can achieve
optimality (6 wavelengths). So we start description of the proposed WAR algorithm from
the 3× 3 torus as shown in Figure 2-9.
32

A
B
C
D
E
F
Figure 2-9. WAR demonstration for the 3× 3 torus
N = 3: In total there are 36 S-D pairs for the 3 × 3 torus, half of which require X-Y
routing and another half of which require X or Y routing. For the S-D pairs requiring
X-Y routing, Figure 2-9(A) shows the arrangement of two of four lightpaths (in red)
for each of 3 S-D pairs (horizontally circulated) on one wavelength, and Figure 2-9(B)
shows the arrangement of the other two lightpaths (in red) for each of 3 S-D pairs
(vertically circulated) on another wavelength. As observed in Figure 2-9(A) andure
2-9(B), an unallocated ring (in blue) is left unallocated on each wavelength. If we
rotate the arrangement in Figure 2-9(A) vertically twice and rotate the arrangement in
Figure 2-9(B) horizontally twice, followed by a reversion of all above arrangements, we
can accommodate the lightpaths setups for all X-Y routing S-D pairs (18 pairs) on 12
wavelengths and there will be in total 12 unallocated rings on different wavelengths
left evenly distributed in the torus structure, which can be used to arrange two
complementary lightpaths for 6 X-routing and 6 Y-routing S-D pairs as shown in blue
in Figures 2-9(A) and 2-9(B). For the X-routing S-D pairs, the other two lightpaths
are shown in Figures 2-9(C) and 2-9(D) respectively (in red) for 3 S-D pairs. There is
still room for arranging 4 mirroring lightpaths of Y-routing S-D pairs shown in blue in
Figures 2-9(C) and 2-9(D). As we rotate the arrangements shown in Figures 2-9(C) and
2-9(D) horizontally twice, all requirements for arranging the mirroring lightpaths of all 9
X-routing S-D pairs and 6 Y-routing S-D pairs are satisfied. Arrangement of mirroring
lightpaths for the rest 3 Y-routing S-D pairs can be made on 2 extra wavelengths as
shown in Figures 2-9(E) and 2-9(F). Thereby, 2 × 3 + 2 additional wavelengths are
33

used to the 12 wavelengths discussed previously. Finally one last wavelength is needed
to provide 6 rings to accommodate 6 pairs of complementary lightpaths that the 12
wavelengths cannot. Following this approach, in total, 21 wavelengths (WWAR(3×3) = 21)
are required to enable all-to-all communications for the 3 × 3 torus, compared with
WLower bound(3×3) = 19 andWNaive(3×3) = 36 as calculated by equations (2–2) and (2–3).
A
B
C
D
E
F
G
H
I
J
Figure 2-10. WAR demonstration for the 4× 4 torus
N = 4: For the 4 × 4 torus, there are in total 120 S-D pairs, 72 of which require X-Y
routing, 24 of which require X routing and the rest 24 of which require Y routing. Figures
2-10(A) and 2-10(B) show how to arrange four lightpaths (in red) on two wavelengths
for the source and the destination one hop away from each other in both X and Y
directions. By circularly rotating and reversing the arrangements, we can enable
4-lightpaths connections for all such S-D pairs (32 pairs in total) using 2 × 4 × 2 = 16
wavelengths and there are 32 unallocated rings evenly distributed throughout the torus
structure on the 16 wavelengths. Figures 2-10(C) and 2-10(D) show how to arrange four
lightpaths on two wavelengths for the source and the destination one hop away from
each other in one direction and two hops away from each other in the other direction.
Similarly, by rotating horizontally and mirroring along the diagonal the arrangements,
34

we can enable the 4-lightpaths setup for all those S-D pairs (32 pairs in total) using
2 × 4 × 2 = 16 wavelengths with 16 unallocated rings evenly distributed across
the torus. The 8 S-D pairs with the source and the destination two hops away from
each other in both X and Y directions can have the 4-lightpaths setups as shown in
Figures 2-10(E) and 2-10(F). By rotating horizontally by one hop, the lightpaths setup
for those 8 S-D pairs is made using 4 fully utilized wavelengths. The 32 + 16 = 48
evenly distributed unallocated rings can be used for arranging the complementary
lightpaths of the 48 S-D pairs which require X or Y routings. The two mirroring lightpaths
of those 48 S-D pairs can be arranged as shown in Figures 2-10(G), 2-10(H), 2-10(I)
and 2-10(J). Figures 2-10(G) and 2-10(H) show how the two mirroring lightpaths are
arranged for the source and destination two hops away from each other in X direction
via routing the second lightpath with the same length in the opposite X direction. By
rotating horizontally by one hop and mirroring along the diagonal the arrangements,
all the mirroring lightpaths for 2-hop-away (both horizontally and vertically) S-D pairs
(16 pairs in total) can be arranged on 8 wavelengths, on which one mirroring lightpath
for 32 one-hop-away S-D pairs can also be arranged as shown. The other mirroring
lightpath setup can be finalized as shown in Figures 2-10(I) and 2-10(J), together
with their mirrored setups along the diagonal, which in total requires 4 wavelengths.
Therefore, the 4-lightpaths setup for 4 × 4 torus all-to-all communications can be
enabled by 16 + 16 + 4 + 8 + 4 = 48 wavelengths (WWAR(4×4) = 48), compared with
WLower bound(4×4) = 46 andWNaive(4×4) = 120.
N ≥ 5: When N grows large, all routing cases (I, II, III, IV, I’, II’, I” and II”) will
appear. Instead of illustrating the WAR algorithm for each torus size, starting from the
5 × 5 torus, we develop a general method to deal with lightpaths arrangement in light of
the following observations.
As shown in Figure 2-11(A), the third lightpaths (in red) of N Case-I-routing S-D
pairs can be piled up along the diagonal direction together with the second lightpaths (in
35

N-dX-dY-2
N-d
X-d
Y-2
dY
d X
A
|dX-dY|
|dX -d
Y |
B
N-dX-dY-2 dY+2
N-d
X-d
Y-2
d X
-2
C
N-2dX
N-2
d Y
D
N-dX-dY
N-d
X-d
Y
E
F
Figure 2-11. Grouping lightpaths
36

blue) of other N S-D pairs on the same wavelength, which are formed by interchanging
dX and dY of the first N S-D pairs. Similarly the fourth lightpaths and first lightpaths can
be arranged together on one wavelength for above S-D pairs of Case I.
As shown in Figure 2-11(B), the third lightpaths (in red) of N S-D pairs (dX > dY )
in cases II or III can be piled up along the diagonal direction together with the third
lightpaths (in blue) of other N S-D pairs (dX < dY ) in cases II or IV on the same
wavelength as shown in Figure 2-11(B).
As shown in Figure 2-11(C), the fourth lightpaths of N S-D pairs in case III can be
piled up diagonally, and the fourth lightpaths of N S-D pairs in case IV can be piled up
similarly by mirroring above setup along the diagonal direction.
For all the X-Y routing cases (I, II, III, IV), the first and second lightpaths of N
S-D pairs of the same positional relationship can be piled up together on the same
wavelength circularly in the diagonal direction as shown in Figure 2-11(D), and the first
lightpaths of N S-D pairs can be piled up together with the second lightpaths of N S-D
pairs of diagonally mirrored positional relation to the former N S-D pairs as shown in
Figure 2-11(E).
For each destination controller with one dimension distance of N/2 from the source
(in Cases II, III, IV) when N is even, if the fourth lightpath can be routed as in Case II,
then N fourth lightpaths (in red) can be piled up together with N second lightpaths (in
blue) for the same set of S-D pairs on one wavelength, as shown in Figure 2-11(F).
We call those destination controllers edge controllers. Hence, we can group those
destination controllers into Case II to achieve higher wavelength utilization through
trading the disjoint routing optimality for those destinations.
Similarly, when N is odd, we group the four destination controllers right above and
besides two bottom corner destination controllers in the destination group into their
neighboring partitions (Cases III and IV), in order to make their fourth lightpaths piled up
in the way shown in Figure 2-11(C).
37

N-dX
Figure 2-12. Group mirroring lightpaths
Finally, for the source and destination located in the same row or column, a full ring
can accommodate the two complementary lightpaths and N mirroring lightpaths can be
piled up in a way shown in Figure 2-12. Since efficient arrangement of multiple fourth
lightpaths for the S-D pairs (refer to Figure 2-5) of cases I’ and I” is almost impossible,
we apply the complementary routing for Cases II’ and II” to the S-D pairs of cases I’ and
I”. D
S D D D D
D D D D D D D D D
D D D D D D D D D
D D D D D D D D D
D D D D D D D D D
Case I Case I
dX=(N-1)/2
dX=(N-3)/2
dX=(N-5)/2
Case II Case II
Case III Case III
Case IV Case IV
Case II’
dy =
(N-5)/2
dy =
(N-1)/2
Case II’’
dX=(N-1)/2
D
D D
D
D
D
D
2N wls 2.5N wls N wls
Figure 2-13. New lightpath setup cases with consideration of WAR (N is odd)
Hence, new routing diagrams considering wavelength allocation and reuse on the
destination group for both parities of N become Figures 2-13 and 2-14. Different dashed
38

2N wls 2.5N wls N wls
S D D D D
D D D D D D D D
D D D D D D D D
D D D D D D D D
D D D D D
Case I Case I
dX=N/2
dX=N/2-1
dX=N/2-2
dX=N/2-1
Case II Case II
Case III
Case IV Case IV
Case II’
Case II’’
dy =
N/2-2
dy =
N/2
Case III
Figure 2-14. New lightpath setup cases with consideration of WAR (N is even)
line covered areas represent the different routing cases described in Section 2.4. Next,
we show the general WAR algorithm for N ≥ 5 in following procedures.
Firstly, for each destination controller in the partition of Case I, two wavelengths
are needed to arrange four lightpaths of N such S-D pairs of the same positional
relationship along the diagonal direction (as shown in Figure 2-11(A)), and after rotating
the arrangement along either X or Y direction N times all N2 S-D pairs of such positional
relationship are arranged with 4 lightpaths set up on 2N wavelengths.
For each destination controller in the partition of case II on the diagonal, Figure
2-11(B) can be applied to arrange N third and N fourth shortest lightpaths on one
wavelength, and the N first and N second shortest lightpaths can be arranged on one
wavelength in the way shown in Figure 2-11(E).
For the edge controllers when N is even, two wavelengths are needed to pile four
lightpaths up for N such S-D pairs of the same positional relationship, where the second
and fourth shortest lightpaths are arranged using Figure 2-11(F), two third shortest
lightpaths coming from two S-D pairs mirroring each other along the diagonal can be
arranged on one wavelength using Figure 2-11(B) and two first shortest lightpaths
coming from two S-D pairs mirroring each other along the diagonal can be arranged on
39

one wavelength using Figure 2-11(E). Hence, in general, we need 2N wavelengths to
complete lightpaths setup for N2 S-D pairs of such positional relations.
For the destination controllers in the area of cases III and IV, we notice that the
fourth shortest lightpath in general cannot be piled up with other lightpaths so only N of
them occupy one wavelength as shown in Figure 2-11(C), although the first and second
shortest lightpaths can be piled up together onto one wavelength as shown in Figure
2-11(D) and the third shortest lightpath for the destination controller in case III can be
piled up with the third shortest lightpath for the destination controller in case IV as shown
in Figure 2-11(B). Therefore, in general 2.5N wavelengths are needed to set up four
lightpaths for all such N2 S-D pairs.
Secondly, we observe that the unused links for the destination controllers in case I
can accommodate the same amount of arrangement for other destination controllers in
case I. For example, after two lightpaths arrangement for the destination controller with
dX = 1 and dY = 1 we can have N − dX − dY − 2 = N − 4 connected unused links
in both X and Y directions, which can accommodate another two lightpath arrangement
for the destination controller with dX = (N − 5)/2 and dY = (N − 7)/2 (when N is odd)
or with dX = (N/2) − 3 and dY = (N/2) − 3 (when N is even). As a result, in fact we
only need one wavelength to arrange four lightpaths of N S-D pairs with the destination
controllers colored in olive green. Besides, when N is odd, in Case III or IV, for the two
destination controllers by two hops away from the diagonal, the fourth shortest lightpaths
can be piled up with the first or the second shortest lightpaths (since dX = dY + 2 or
dY = dX + 2), so the wavelength requirement for these destination controllers decreases
form 2.5N to 2N for N2 such S-D pairs. The areas in different colors in Figures 2-13 and
2-14 indicate different number of wavelengths required in the WAR algorithm.
Finally, we need to deal with the lightpaths arrangement for the destination
controllers in the same row or column of the source controller. Since there are many
unallocated links left during lightpaths setup for X-Y routing S-D pairs, many lightpaths
40

for those X or Y routing destination controllers can be arranged on those unallocated
links.
While N is odd:
N ≥ 11: The unallocated links (as shown in Figure 2-11(E)) for the first shortest
lightpath for the destination controller of coordinates (dX = (N − 3)/2, dY = 1) and
the second shortest lightpath for the destination controller of coordinates (dX = 1,
dY = (N − 3)/2) can accommodate N mirroring lightpaths in the diagonal direction (as
shown in Figure 2-12) for the destination controller of coordinates (dX = (N − 1)/2,
dY = 0), the other half of the mirroring lightpaths can be arranged together similarly with
other two lightpaths for above two destination controllers. In addition, the unallocated
links (as shown in Figure 2-11(A)) on two allocated wavelengths for the destination
controllers of coordinates from (dX = (N − 5)/2, dY = 1) to (dX = (N − 5)/2,
dY = (N − 5)/2) can accommodate two mirroring lightpaths of the destination controllers
of coordinates from (dX = (N − 3)/2, dY = 0) to (dX = 2, dY = 0). The last two
mirroring lightpaths for the destination controller (dX = 1, dY = 0) can be arranged with
the first and second shortest lightpaths for two destination controllers of coordinates
(dX = (N − 1)/2, dY = (N − 3)/2) and (dX = (N − 3)/2, dY = (N − 1)/2) separately.
Following the same idea, we can use the unallocated links for the corresponding
destination controllers in the left half to accommodate two mirroring lightpaths for the
destination controllers of coordinates from (dX = 0, dY = 1) to (dX = 0, dY = (N − 1)/2).
For the two complementary lightpaths of the length from 1 to N − 1, we explore the
unallocated links for the first and second shortest lightpaths arranged in the way shown
in Figure 2-11(D) for the destination controllers of case III and IV. We observe that,
except for the lightpath of length N − 1, all the lightpaths can be arranged using those
unallocated links. The unarranged lightpaths (of length N−1) need extra N wavelengths.
41

So, the total number of wavelengths required to arrange all lightpaths is
WWAR =
N − 72× N − 5
2× 2× 1 + N − 5
2× 2× 2
+
[(N − 12
)2−(N − 52
)2]× 2× 2.5− 12× 0.5
× N + N
=1
2N(N2 + 12N − 55) .
(2–6)
N = 9: Now the first and second shortest lightpaths to the destination controllers of
coordinates (dX = (N − 3)/2, dY = (N − 7)/2) and (dX = (N − 7)/2, dY = (N − 3)/2)
need to be arranged in the way shown in Figure 2-11(E) in order to accommodate X
or Y routing lightpaths, so wavelength requirement becomes 2.5 for these destination
controllers andWWAR becomes
WWAR =
N − 72× N − 5
2× 2× 1 + N − 5
2× 2× 2
+
[(N − 12
)2−(N − 52
)2]× 2× 2.5− 8× 0.5
× N + N
=1
2N(N2 + 12N − 51) .
(2–7)
N = 7: Similarly since the first and second shortest lightpaths to the destination
controllers of coordinates (dX = (N − 5)/2, dX = (N − 1)/2) and (dX = (N − 1)/2,
dY = (N−5)/2) need to be arranged in the way shown in Figure 2-11(D), the wavelength
requirement for these destination controllers becomes 2.5 and henceWWAR becomes
WWAR =
N − 72× N − 5
2× 2× 1 + N − 5
2× 2× 2
+
[(N − 12
)2−(N − 52
)2]× 2× 2.5− 4× 0.5
× N + N
=1
2N(N2 + 12N − 47) .
(2–8)
N = 5: Since destination controllers of coordinates (dX = (N − 3)/2 = 1, dY = 1)
and (dX = 1, dY = (N − 3)/2 = 1) become the same controllers, the unallocated links
of the arrangement of the first and second shortest lightpaths for this controller can only
42

accommodate N mirroring lightpaths in the diagonal direction (as shown in Figure 2-12)
for the destination controller of coordinates (dX = (N − 1)/2 = 2, dY = 0), extra 2N
wavelengths are needed to accommodate the other half of above mirroring lightpaths.
HenceWWAR becomes
WWAR =
N − 72× N − 5
2× 2× 1 + N − 5
2× 2× 2
+
[(N − 12
)2−(N − 52
)2]× 2× 2.5− 8× 0.5
× N + N + 2N
=1
2N(N2 + 12N − 43) .
(2–9)
While N is even and N ≥ 6:
Similar to the method for N being odd, we use the unallocated links for the
destination controllers of coordinates (dX = (N/2)− 1, dY = 1), (dX = (N/2)− 2, dY = 1)
through (dX = (N/2) − 2, dY = (N/2) − 2) to accommodate the two mirroring lightpaths
for the destination controllers of coordinates from (dX = (N − 2)/2, dY = 0) to (dX = 1,
dY = 0). However, the lightpaths for the destination controller (dX = N/2, dY = 0) are
left without being arranged, so together with the lightpaths for the destination controller
(dX = 0, dY = N/2), extra 2N wavelengths are needed to arrange those lightpaths. In
addition, 3N wavelengths are needed to arrange 3 complementary lightpaths with length
N − 1, N − 2 and N − 3 for the destination controllers in the same row or column of the
source by 1, 2 and 3 hops away. ThenWWAR becomes
WWAR =
2×
(N − 62
)2× 1 + 2×
[(N − 12
)2−(N − 62
)2]× 2
+N − 42× 4× 0.5
× N + 2N + 3N
=1
2N(N2 + 10N − 32) .
(2–10)
The expressions ofWWAR with respect to different torus sizes are listed in Table
2-3. Based on theWWAR expressions, we can plot the number of wavelengths required
for all-to-all communications with comparison amongWNaive ,WWAR andWLower bound ,
43

Table 2-3. Summary ofWWAR expressions for different torus sizesWWAR ExpressionsWWAR (N = 2) 6WWAR (N = 3) 21WWAR (N = 4) 48WWAR (N = 5) N(N2 + 12N − 43)/2WWAR (N = 7) N(N2 + 12N − 47)/2WWAR (N = 9) N(N2 + 12N − 51)/2WWAR (N ≥ 11, N is odd) N(N2 + 12N − 55)/2WWAR (N ≥ 6, N is even) N(N2 + 10N − 32)/2
as shown in Figure 2-15. The numerical details for tori with one-dimensional size
ranging from 2 to 10 are shown in Table 2-4. From the results, we can observe the great
wavelength saving via using the proposed WAR algorithm and thatWWAR is actually very
close to the lower boundWLower bound . It is also noticed that WAR performs better when
N is even than when N is odd, mainly due to the lightpath arrangement easiness for an
even N as shown in Figure 2-14. For the tori in small sizes, such as 2×2, 3×3, 4×4, the
WAR-derived results are equal or very close to the best possible results (lower bounds).
This hence can lead to elimination of wavelength converters from the controller design
without noticeable wavelength utilization degradation.
0 5 10 15 20 25 300
2000
4000
6000
8000
10000
12000
14000
16000
18000
One Dimension Size (N) in NxN Torus
Num
ber
of w
ls R
equi
red
for
All−
to−
All
Com
mun
icat
ions
NaiveWARLower bound
Figure 2-15. WAR algorithm performance
44

Table 2-4. Wavelength requirement for varied torus sizesN WLower bound WWAR WNaive2 6 6 63 19 21 364 46 48 1205 88 105 3006 154 192 6307 237 301 11768 352 448 20169 488 621 324010 664 840 4950
We note that the number of wavelengths approaches an unusually large number
(ten thousand when the dimension size N is above 25,) which may seem unrealistic.
These results are academically informative. However, the research project that this
chapter is based upon is limited to a more realistic sized 4 × 4 torus, which supports
16 backbone controllers and requires 48 wavelengths on each one-hop connection, or
N = 4 in Table 2-4 [45].
2.6 Controller Implementation
The actual controller implementation needs to integrate functionalities of the
controller as the source, destination and intermediate router together. As a data source,
data targeting to a specific destination need to be modulated onto wavelengths allocated
by the WAR algorithm and then multiplexed with all “pass-through” wavelengths before
being sent. As an intermediate router, all-optical 1 × 3 switches can be used to switch
the signal from a specific input port to any of the remaining 3 output ports based on the
lightpaths setup. The use of all-optical switches eliminates OEO conversion along all
lightpaths and hence enables efficient one-shot transmission. Finally, as a data sink,
the specific wavelengths are dropped based on the WAR algorithm again from all 4
receiving directions. The controller reception structure is shown in Figure 2-16.
In the fault-free case, 4 copies of demodulated data are buffered and the one
received from the shortest lightpath is passed onto the application layer for processing.
45

123..
Choose the buffer to read
To the Application layer
123..
123..
123..
LSN update
Msg ID(for packet retirement)
Figure 2-16. Reception structure of the controller
Upon data reception by the application layer, the data received from the remaining 3
directions are deleted from the corresponding buffers.
Upon occurrence of a link failure, a special type of message called Link Status
Notification (LSN) will reach each controller through broadcast from the detecting
controller. The controller then can make decision of whether or not to switch its receiving
direction based on knowledge of the lightpaths setup.
2.7 Performance Analysis
In this section, we first introduce probabilistic models to analyze network connection
reliabilities for the proposed architecture. Then we show the impact on network
throughput caused by a series of network faults to provide additional insight on the
network fault tolerance performance.
2.7.1 Probabilistic Analysis
The fault tolerance metrics used are two-terminal reliability (TTR), one-to-all-others
reliability (OAR) and all-terminal reliability (ATR) for comprehensive analysis. TTR
indicates communication reliability for a single S-D pair. OAR signifies the ”broadcast”
reachability from a specific source, while ATR reflects the functioning possibility of the
whole network.
To carry out the probabilistic analysis, we associate the probability of failure (f ) to
each one-hop connection between neighboring controllers. Under the assumption of
46

independent one-hop connection failure with identical probability, general approaches to
calculating probabilities of TTR, OAR and ATR are as follows.
The probability of two-terminal reliability is
PTTR = 1−e∑
i=λSD
CSDi fi(1− f )e−i , (2–11)
where f is the uniform probability of failure for all one-hop connections, e is the number
of one-hop connections in the network, λSD is the minimum number of one-hop
connection failures required to disconnect the S-D pair and CSDi is the number of
failure sets with respect to the source (S) and destination (D) of cardinality i .
The probability of one-to-all-others reliability is
POAR = 1−e∑i=λS
CSi fi(1− f )e−i , (2–12)
where λS is the minimum number of one-hop connection failures required to disconnect
the source from at least one controller in the rest of the network and CSi is the number of
failure sets of cardinality i with respect to the source (S).
The probability of all-terminal reliability is:
PATR = 1−e∑i=λ
Ci fi(1− f )e−i , (2–13)
where λ is the minimum number of one-hop connection failures required to disconnect
any S-D pairs and Ci is the number of failure sets of cardinality i with respect to any S-D
pairs.
Instead of showing TTR, OAR and ATR, this chapter presents analysis of
two-terminal unreliability (TTUR), one-to-all-others unreliability (OAUR) and all-terminal
unreliability (ATUR), which take on complementary probabilities of TTR, OAR and ATR
respectively. The lower the above probabilities, the better the network reliability can be
achieved.
47

The general calculation approaches to calculating probabilities of network
connectedness, as shown in equations (2–11), (2–12) and (2–13), have been proved to
belong to NP-hard problems [61]. Researchers usually apply bounding techniques or
use Monte Carlo sampling methods to obtain reliability measures. However, with respect
to the proposed non-overlapping 4-lightpaths setup algorithm (FOLD) and fault tolerance
protocol, the TTUR probability can be calculated by a simple closed-form expression.
For the two-terminal connectedness, it can be shown that only after all four
lightpaths are blocked can the S-D pair lose connectivity. Hence, the probability of
TTUR is given by the same expression as in equation 2–1, rewritten as follow
PTTUR = (1− pl1)(1− pl2)(1− pl3)(1− pl4) . (2–14)
Due to the symmetric nature of the torus structure, there is no difference for
selection of the source controller, so we fix the source at the controller 11 and take a
4 × 4 torus as an example of analysis (refer to Figure 2-1 for controller indices). Figure
2-17 shows the probabilities of two-terminal disconnection (PTTUR) of 11 from 12 and
from 33, which are two extreme cases in terms of the distance between the source
and the destination in a 4 × 4 torus. It can be observed that the connection reliability
gets greatly improved by comparing with the probability of one path failure (such as the
path between 11 and 33). The distribution of PTTUR from the controller 11 across the
network to all other controllers is given in Figure 2-18, which provides insight on relative
positional impact of the source and the destination in a torus on TTUR.
With respect to the one-to-all-others and the all-terminal reliability analysis, following
equations (2–12) and (2–13), for all possible combinations of one-hop connection
failures, the one-to-all-others connectivity and the all-terminal connectivity are examined
under the proposed lightpaths setup. An exhaustive calculation of POAUR and PATUR
for a 4 × 4 torus is carried out and the results are shown in Figure 2-17. The results
show that the proposed fault-tolerant architecture offers good reliability even for
48

10−2
10−1
100
10−8
10−6
10−4
10−2
100
Probability of Link Failure (f)
Pro
babi
lity
of D
isco
nnec
tion
One path failure between 11 and 33All−terminal11 to all othersTwo−terminal between 11 and 33Two−terminal between 11 and 12
Figure 2-17. Network unreliability analysis for a 4× 4 torus
Figure 2-18. TTUR distribution for a 4× 4 torus (f = 0.1)
all-terminal connectivity under regular failure stress (f ≪ 0.1). It is expected that
the one-to-all-others connectivity is less reliable than the two-terminal connectivity and
the all-terminal connectivity is least reliable.
Sometime people may be concerned about the chance of connection sustenance
upon occurrences of a number of one-hop connection failures. The conditional PTTUR ,
POAUR and PATUR on a fixed number of one-hop connection failures are given by
49

equations (2–15), (2–16) and (2–17):
PTTUR |n one−hop connection failures =CSDn(en
) (2–15)
POAUR |n one−hop connection failures =CSn(en
) (2–16)
PATUR |n one−hop connection failures =Cn(en
) (2–17)
where(en
)is the number of combinations of n one-hop connections out of the one-hop
connection set of cardinality e. The meanings of rest items in above formulae are
the same as they are in equations (2–11), (2–12) and (2–13). Figure 2-19 shows the
results for those conditional evaluations of connection reliability. The results testify our
architecture design against any 3 critical cuts without loss of any network connectivity.
The results also show the trends of conditional reliability variation with the number of
failed one-hop connections. It can be observed that there is a big probability (> 0.8) for a
two-terminal connection to survive over even 8 one-hop connection failures.
Figure 2-19. Conditional probabilities of connection failures for a 4× 4 torus
50

2.7.2 Network Capacity Analysis
Not only is the connection reliability affected by the network faults, but also the
network capacity, because the blocked transmissions will degrade the network capacity.
We define the network capacity as the sum of communication capacities of all S-D
pairs. Assume the communication is operated via optical lasers with a transmission
rate of 1 Gbps. Then the network capacity simply equals the product of the number of
communication pairs and the bidirectional transmission rate (2 Gbps) in the failure-free
case. Here we consider all-to-all communication and hence the failure-free network
capacity is given by
Tfault−free =N2(N2 − 1)
2C , (2–18)
where C is the bidirectional transmission rate.
The network capacity upon a number of one-hop connection failures can be
measured in terms of average degraded network capacity, best-case degraded network
capacity and worst-case degraded capacity. The average degraded network capacity is
the expected network capacity under a certain number of one-hop connection failures
(n) that can evenly take place across the network. It is defined by
Tavg | n failures = Tfault−free − C(en)∑i=1
Di(en
) , (2–19)
where Di is the number of disconnected S-D pairs caused by the i th n one-hop
connection failure combination.
The worst-case degraded capacity under n one-hop connection failures is defined
by
Tworst | n failures = Tfault−free − C ·maxiDi , (2–20)
where the index i varies from 1 to(en
).
51

The best-case degraded capacity under n one-hop connection failures is defined by
Tbest | n failures = Tfault−free − C ·miniDi . (2–21)
We still use the 4 × 4 torus to exemplify the fault impact on network capacity and
demonstrate fault tolerance performance of the proposed architecture. The calculation of
all degraded network capacities in equations (2–19), (2–20) and (2–21) is via exhaustive
failure enumeration and connection check due to the acceptable size of the selected
torus.
Figure 2-20. Effects of network failures on network capacity
Figure 2-20 shows how the network capacity degrades with the number of one-hop
connection failures under the proposed 4-lightpaths protective architecture. First, it
is proved again that the network can survive over 3 arbitrary faults without loss of
network capacity. Second, the huge gap between the best-case capacity and worst-case
capacity indicates the great impact of positional difference of failures on the network
capacity. Besides, the best-case and worst-case capacities also serve as bounds when
predicting the network capacity under a given number of connection failures. Last,
on average, the network can still maintain 92% of its original capacity after 8 one-hop
connections fail, which count for 25% of one-hop connections in the network.
52

Figure 2-21. Average capacity degradation comparison between the proposed4-lightpaths communication and single-lightpath communication
Figure 2-21 shows how different the network capacity degrades for the proposed
4-lightpaths architecture and the 1-lightpath architecture with the routing and wavelength
assignment proposed by [9] respectively. The advantage of 4-way protection against
network capacity degradation is evident as shown in the figure especially for a small
number of one-hop connection failures, which is the normal case when a network
operates.
In this chapter, we propose a torus-based fault-tolerant all-optical architecture
that applies four optimal non-overlapping lightpaths to achieve a fast 3-failures-free
protection. In order to minimize wavelength utilization, we also propose a wavelength
allocation and reuse scheme via a comprehensive discussion over varied sizes of torus.
Besides efficient data delivery via lightpath communication and fast failure recovery via
redundant non-overlapping lightpaths protection, the proposed network architecture
shows a huge fault tolerance performance improvement that is demonstrated via
comprehensive connection reliability and network capacity analysis. All in all, the
architecture proposed in this chapter has a great potential to become a satisfying
solution to modern avionic communication systems.
53

CHAPTER 3TRADEOFF STUDY ON FAULT TOLERANCE CAPACITY AND RESOURCE
UTILIZATION FOR THE TORUS-BASED ALL-OPTICAL WDM LANS
In the last chapter, we discuss the torus-based fault tolerance scheme for
all-terminal communications, in which an optimal 4-way fault-tolerant routing algorithm
(FOLD) is proposed and a wavelength allocation and reuse (WAR) scheme is developed
to allocate wavelength resources to disjoint lightpaths in a dedicated fashion. Actually,
the wavelengths allocated to the protective (spare) lightpaths have potential to be shared
by those lightpaths and that results in a lower level of spare wavelength utilization. In
this chapter, we examine the wavelength efficiency in fault tolerance by comparing
the dedicated wavelength assignment schemes with shared wavelength assignment
schemes.
The main contributions of this chapter are as follows: 1. a tradeoff study is
conducted to examine the protection efficiency of spare wavelengths for four Wavelength
Assignment (WA) schemes spanning from no protection, through shared protections, to
dedicated protection in the spare wavelength utilization spectrum; 2. two spare sharing
schemes are developed to allocate wavelength resources to spare lightpaths in order to
lower the overall spare wavelengths demand; 3. a comprehensive reliability evaluation
framework is exhibited and extensive simulation results provide insight into the essential
performance-cost tradeoff of fault tolerance and protective resource allocation.
The rest of this chapter is organized as follows. Section 3.1 describes four WA
schemes for all-to-all communications spanning from the lowest end to the highest end
of the spare wavelength utilization spectrum. The failure recovery scheme is illustrated
in Section 3.2. Section 3.3 provides mathematical formulations of network reliabilities.
Section 3.4 describes simulation techniques, shows simulation results, and concludes
this chapter.
54

3.1 Wavelength Assignment Schemes
In this section, we develop four WA schemes along the spare wavelength utilization
spectrum, each of which protects the network at a different level. The first WA scheme
does not assign any protective wavelengths to spare lightpaths and hence provides no
protection to failed connections. Hence, this WA scheme only needs to consider WA
for working paths. As indicated in the last chapter, there exist optimal single-lightpath
RWA solutions for both parities of N in a N × N torus (demanding N3/8 and N(N2 − 1)/8
wavelengths for even and odd N respectively). In the optimal RWA solution, each
lightpath is routed via its shortest path and all the wavelengths allocated are fully
occupied. Since no spare wavelength is allocated in this WA scheme, we label this WA
scheme ”No Spare” (NS).
The second WA scheme, in addition to allocating wavelengths to working paths in
the way as described in the first WA scheme (NS), groups all the spare paths of all S-D
pairs, as depicted in Figure 3-1 in green, onto one single spare wavelength. Since this
very spare wavelength is intensively shared by all spare paths of all S-D pairs, high-level
resource contention is expected during failure-recovery-induced lightpath switches.
However, since there are three alternative disjoint paths that are possible to take over
the communication, the probability of a successful switch is higher than the traditional
”1:1”- or ”1+1”-based protection, which is an advantage of four-way disjoint routing
in fault tolerance. We label this WA scheme ”Single Spare” (SS). This WA scheme is
illustrated in Figure 3-2(A).
The third WA scheme, instead of allocating only one spare wavelength to the entire
group of spare paths, assigns one spare wavelength to a subgroup of the spare paths
that belong to the S-D pairs whose working paths are allocated on the same wavelength
(working wavelength). Due to lowered contention level on the spare wavelengths, the
successful switching probability is expected to be higher than the second WA scheme
(SS). Besides, this WA scheme can tolerate one arbitrary link failure because the
55

A Source and destination in dif-ferent dimensions
B Source and destination in thesame dimension
Figure 3-1. Examples of 4 disjoint lightpaths setup between different S-D pairs in a 4× 4torus (the lightpath in dark red is the working path and the three lightpaths inolive green are spare paths)
A Single Spare (SS)
B Spare Working Interleaving (SWI)
Figure 3-2. Wavelength assignment for two spare sharing schemes
communications carried on the working lightpaths affected by the link failure can be
individually switched to one of their link-disjoint spare paths without resource conflicts.
We label this WA scheme ”Spare Working Interleaving” (SWI) and this scheme is
illustrated in Figure 3-2(B).
The fourth WA scheme, by allocating dedicated wavelengths to each working and
spare lightpaths , avoids resource conflicts resulting from the failure-recovery-induced
switches. Thereby, the network will be able to tolerate at least three arbitrary link
failures without loss of any connections. The RWA solution to this dedicated four-way
all-terminal communication is described in the last chapter for all possible sizes of an
56

N×N torus. Although the solution achieves good optimality, the total wavelength number
required is more than 4 times of that for pure-working-path communication (in the ”No
Spare” scheme), which only requires 8 wavelengths for the 4 × 4 torus. The gain in fault
tolerance capacity may not balance the spare wavelength expenditure. We label this WA
scheme ”DEDICATED”. Figure 3-3 shows the total numbers of wavelengths required for
the four WA schemes when N varies. Table 3-1 summarizes the number of protective
(spare) wavelengths required by the four WA schemes described above for the N × N
torus.
1 2 3 4 5 6 7 80
50
100
150
One dimension size (N) in an NxN torus
Tot
al n
umbe
r of
wav
elen
gths
req
uire
d
NSSSSWIDedicated
Figure 3-3. Total numbers of wavelengths required for four WA schemes
Table 3-1. Spare wavelength requirementsWA scheme NS SS SWI DEDICATED
Number or equivalent numberof protective wavelengthsfor a N × N torus
0 1
N is even:N3/8N is odd:N(N2 − 1)/8
N is even:W ∗WAR − N3/8N is odd:W ∗WAR − N(N2 − 1)/8
∗ WWAR is the number of wavelengths allocated for dedicated 4-way protection. Theexpressions ofWWAR for different N can be found in Table 2-3. In general,WWAR is morethan 4 times of the wavelength number required by pure-working-path communicationespecially when N goes large.
57

3.2 Failure Recovery
The first WA scheme does not involve any fault tolerance support while the fourth
WA scheme simply makes the destination independently switch reception from among
the four dedicated lightpaths. The complicacy of failure recovery only comes from the
second and third WA schemes because of the need to handle the resource conflicts
among spare lightpaths. ! " !#!Figure 3-4. Lightpath state transition diagram for resource-shared WA schemes
Figure 3-4 shows possible state transitions of lightpaths, which are essentially
triggered by failure recovery. The transition between SPARE and UNAVAIL may result
from resource conflicts, for which an example is demonstrated in Figure 3-5, where the
spare lightpath from 31 to 33 experiences two state transitions, SPARE→ UNAVAIL and
UNAVAIL→ SPARE, successively.
Once a failure occurs to a link, more than one working lightpath can be affected.
The order of selecting failed working paths for recovery makes difference to the fault
tolerance results because of the resource conflicts among their spare paths. We
examine two selection strategies as follows.
• RANDOM: randomly select a working lightpath for recovery from the pool ofaffected working lightpaths
• SHORTEST: select the working lightpath with the shortest spare lightpath
58

A blocked spare lightpath (31→ 33)
B Re-enabled spare lightpath
C
Figure 3-5. An example of spare lightpath re-enabling in a 4× 4 torus
3.3 Reliability Analysis
We evaluate the fault tolerance performance of all four WA schemes via measuring
the connection reliabilities and the under-failure network capacity.
The connection reliabilities are equivalently captured by the probability of their
complementary events, connection unreliabilities, as defined as follows.
• Two-Terminal UnReliability (TTUR), One-to-All-others UnReliability (OAUR), andAll-Terminal UnReliability (ATUR):
PTTUR =
e∑i=λSD
(ei)∑k=1
CSDkP iif i(1− f )e−i , (3–1)
POAUR =
e∑i=λS
(ei)∑k=1
CSkP iif i(1− f )e−i , (3–2)
and
PATUR =
e∑i=λ
(ei)∑k=1
Ck
P iif i(1− f )e−i , (3–3)
• Conditional TTUR, OAUR, and ATUR on a given number (n) of bidirectional fiberlink (bilink) failures:
59

PTTUR | n bilink failures =
(en)∑k=1
CSDkPnn
, (3–4)
POAUR | n bilink failures =
(en)∑k=1
CSkPnn, (3–5)
and
PATUR | n bilink failures =
(en)∑k=1
CkPnn. (3–6)
The notations used in the above six equations are explained as follows. f is the
uniform bilink failure probability. e is the total number of bilinks in the torus. λSD , λS ,
and λ are the minimum numbers of bilink failures required to disconnect a specific S-D
pair, the source (S) from any of other controllers, and any S-D pair, respectively.(ei
)is the number of combinations of i bilink failures coming from e possible bilinks. P ii is
the number of permutations for the selected i bilink failures. CSDk , CSk , and Ck are the
numbers of bilink failure permutations disconnecting a specific S-D pair, the source (S)
from any of other nodes, and any S-D pair, respective, for the k th failure combination.
In order to evaluate the impact of bilink failures on the network capacity, we
calculate the average network capacity conditioned on a number of bilink failures as
follows.
Tavg | n bilink failures = Tfault−free − C ·1
Pen
Pen∑i=1
Di (3–7)
Tfault−free is the fault-free network capacity, which is actually the sum of capacities
of all source-destination pairs. C is the full transmission rate for a S-D pair (1 Gbps
assumed in the simulation that follows). Di is the number of disconnected S-D pairs for
the i th permutation of n bilink failures.
60

3.4 Simulation and Numerical Results
All of above reliability performance metrics involve counting the number of bilink
failure permutations that result in disconnections. We again resort to the Monte-Carlo
sampling technique to uniformly generate 100, 000 random bilink failure permutations
when the cardinality of the bilink failure set exceeds 5. We then approximate the
calculations of the above equations using Monte-Carlo samples triggered simulation. A
4 × 4 torus is selected as the example network and numerical results are reported as
follows.
Figure 3-6 shows the connection unreliability difference among different WA
schemes and path selection orders. The difference is evident because of the quantity
difference in spare resource provision. Also observed is that the path selection order
makes difference in the second WA scheme (SS) but makes negligible difference in the
third WA scheme (SWI). This is because resource contention in SS is much severer
than in SWI such that selection of shorter spare paths makes the spare resources
more efficiently utilized. However, SHORTEST selection favors the S-D pair with a
shorter spare lightpath while disfavors the S-D pair with a longer spare lightpath. This is
observed in Figures 3-6(A) and 3-6(B) for which the shortest spare lightpaths of the S-D
pairs 11 → 22 (refer to Figure 3-1 for node indexing) and 11 → 33 are of length 2 and
4. The conditional connection unreliabilities, on a number of bilink failures, are shown
in Figure 3-7. Besides the similar trend observed from unconditional unreliabilities, it
is confirmed that the SWI and DEDICATED WA schemes make the network able to
tolerate one and three arbitrary bilink failures, respectively.
Figure 3-8(A) shows the difference of capability in maintaining network capacity
upon a certain number of bilink failures among different WA schemes. Further insight
into the wavelength efficiency can be obtained in Figures 3-8(B) and 3-8(C). The former
one shows the comparison of per-wavelength capacity among different WA schemes.
The latter one shows the comparison of per-spare-wavelength capacity gain, which is
61

A PTTUR (11→ 22) B PTTUR (11→ 33)
C POAUR (from 11)
Figure 3-6. Connection unreliabilities in the 4× 4 torus
defined as the ratio of the overall capacity gain (from that of WA scheme NS) to the
number of spare wavelengths. The number of spare wavelengths for a 4 × 4 torus is
0, 1, 8, and 48 for the four WA schemes respectively. From Figure 3-8(B), we observe
that, although the DEDICATED scheme achieves the best overall capacity protection
(as shown in Figure 3-8(B)), it is the least cost-efficient WA option. From Figure 3-8(C),
we observe that SS is the most spare-resource-efficient WA scheme since the only
spare wavelength is maximally utilized due to the highest-level failure-recovery-induced
switching demand on it.
62

A Conditional PTTUR (11→ 22) B Conditional POAUR (from 11)
C Conditional PATUR
Figure 3-7. Conditional network unreliabilities in the 4× 4 torus
The underlying reason for the performance difference among different WA schemes
is revealed by Figure 3-9. Figure 3-9(A) shows the average switch blocking rate
conditioned on a number of bilink failures, which is defined as the ratio of the number of
unsuccessful failure-recovery-induced switches (no available lightpath for switch) to the
total number of switching trials. Reversely, Figure 3-9(B) shows the successful switching
rate contributed, on average, by a spare wavelength. This, from another perspective,
indicates the wavelength efficiency in tolerating failures. The comparison shown in
63

A Average network capacity (Gbps) B Average per-wavelength capacity (Gbps/wl)
C Average per-spare-wavelength capacity gain(Gbps/wl)
Figure 3-8. Conditional network capacity in the 4× 4 torus
Figure 3-9(B) among different WA schemes has an indication similar to the comparison
shown in Figure 3-8(C) in wavelength efficiency.
This chapter proposes and examines four WA schemes on the torus topology,
three of which provide fault tolerance support in different degrees. The pure
working-lightpath-oriented WA scheme demands no spare wavelength provision
and however supports no failure protection. The dedicated 4-way protection WA
scheme provides the highest level of fault tolerance but does not efficiently leverage
the spare wavelengths. In the middle of the spare wavelength utilization spectrum, the
64

A Blocking rate (%) B Per-spare-wavelength success rate (%/wl)
Figure 3-9. Conditional blocking/success rates in the 4× 4 torus
two spare-resource-sharing WA schemes provide reasonable balance between spare
resource utilization and fault tolerance capacity in the sense of wavelength-protection
efficiency in supporting failure-recovery-induced switches and maintaining network
capacity.
65

CHAPTER 4CIRCULANT-GRAPH-BASED FAULT-TOLERANT ROUTING FOR ALL-OPTICAL WDM
LANS
Alluring features of the all-optical WDM network, such as huge bandwidth provision,
negligible transmission latency, and resistance to electromagnetic interference, identify
the all-optical WDM network itself a promising design option for the next-generation
mission-crucial local area networks (LANs), such as avionic onboard communication
systems. However, the combination of the hazardous working condition and operational
uncertainty of fiber-optic devices makes the communication subject to faults. Hence,
it becomes critical to equip the communication system with qualified fault tolerance
capability in the network design phase.
4.1 Related Work
In the recent literature, redundant lightpaths protection becomes a fault-tolerant
solution that can meet the fast recovery requirement. In [62], the authors focus on
physical layer issues such as the model of combining signals from different lightpaths,
optimality of the decision rule and error probability bound. At the network layer, our
previous work studies the routing and wavelength allocation issues based on a 2-D
torus topology [60]. However, the 2-D torus topology puts certain restrictions both on
the number of supported nodes and on the network connectivity, because the number
of supported nodes has to be a product of two integers (numbers of nodes in a row
and a column respectively) and each node is of a connection degree 4. Therefore no
more than 4 disjoint lightpaths can be established simultaneously. In [61], a reliability
analysis model is constructed for the all-optical network over various network topologies:
circulant, Harary, Cages and Moore graphs. It concludes that circulant graphs are
principal candidate topologies. However, its reliability analysis is purely based on
associating a failure probability onto each link and does not consider any routing issues.
In this chapter, we focus on circulant graphs and explore their fault-tolerant
potentials. In [32], a directed circulant graph is studied and an algorithm is provided
66

for establishing n node-disjoint paths between a node pair. However, the algorithm
puts a limitation on the number of supported nodes and on the network connectivity.
In this work, instead of the directed graph, we consider undirected graph and hence
double the network connectivity and fault-tolerance capacity. In addition, we relax the
limitations on the number of supported nodes and on the network connectivity. In other
words, any number of supported nodes and node degree can be accommodated in
our architecture. In [16], based on a circulant graph containing k redundant nodes, a
k-fault-tolerant solution is proposed to maintain isomorphism of the original graph under
any k node failures. This design applies only for parallel computing processors because
the computation can be switched between any two processors after one of them fails.
However, in our architecture we assume each node is positionally tied to a data source
or sink and hence arbitrary functional switch between nodes is almost impossible.
The major contributions of this chapter are follows: 1. we propose a
circulant-graph-based all-optical WDM LAN architecture; 2. we develop a fault-tolerant
routing algorithm that fully explores the circulant graph connectivity via setting up a
maximum number of node-disjoint lightpaths; 3. we analytically calculate network
resource utilization measured by the numbers of required links and wavelengths; and 4.
we derive a reliability model combining effects of both node and link failures.
The rest of this chapter is organized as follows: Section 4.2 defines the network
architecture and describes the node-disjoint lightpaths setup algorithm. Based on
the lightpaths setup, network resource utilization is analyzed in Section 4.3. Section
4.4 provides a probabilistic model and shows the network-reliability related numerical
results, followed by a chapter summary in the end.
4.2 Fault-Tolerant Routing Algorithm
In this section, we describe the circulant-graph-based all-optical network
architecture that offers flexibility in the number of supported nodes and network
67

connectivity. Then based on the architecture definition, we develop a node-disjoint
lightpath setup algorithm to fully explore fault-tolerance capability.
4.2.1 Circulant Network Architecture A C12(1, 2, 3)
D S
B 6 node-disjoint lightpathsbetween nodes 0 and 3
D S
C 6 node-disjoint lightpathsbetween nodes 0 and 6
D S
D 6 node-disjoint lightpathsbetween nodes 0 and 1
Figure 4-1. Circulant-graph-based network architecture and examples of fault-tolerantrouting via establishing node-disjoint lightpaths
A circulant graph CN(A), where N is a positive integer and A ⊆ a | 1 ≤ a ≤ ⌊N/2⌋,
is a graph of N vertices1 in which the i th vertex is adjacent to the (i + j)th and (i − j)th
vertices2 for each j in set A. For instance, CN(1, ..., ⌊N/2⌋) corresponds to a complete
graph and CN(1) represents a ring. Thereby we define the circulant-graph-based
1 We index the N vertices from 0 to N − 1 clockwise.
2 If (i + j) or (i − j) is beyond the range (0,N − 1), their modulo values (by N) should be taken.
68

all-optical architecture as follows: 1. replace all vertices by data delivery and reception
nodes; 2. replace all edges by two unidirectional optical fibers running in opposite
directions. Each node has direct optical connections to 2|A| other nodes3 . Since
transmission latency is negligible in all-optical networks which deliver data through
all-optically-switched lightpaths, the graph diameter is not a great concern and hence we
fix the offset set A = 1, ...,W , whereW ∈ 1, ..., ⌊N/2⌋. The value ofW depends on
fault-tolerance requirement (the number of disjoint lightpaths). A circulant-graph-based
architecture example is shown in Figure 4-1(A), in which 12 nodes are connected in a
circulant fashion and every node has 6 direct optical connections to its index-closest
neighbors.
4.2.2 Node-Disjoint Lightpaths Setup
Since in the network architecture described above each node can simultaneously
send and receive data through its 2W neighboring nodes4 , there may exist 2W disjoint
paths for any communication pairs. We assume that the destination node uses the same
lightpath in reverse to reach the source so ”directed lightpath” can be simply replaced
by ”lightpath”. In this section we develop a 2W -node-disjoint-lightpaths setup algorithm
for any source and destination. Due to the symmetric nature of circulant graphs, in our
discussion we fix the source at node 0 and vary the destination node index from 1 to
⌊N/2⌋. According to the positional relationship between the destination node (indexed
by D) and the node indexed byW , the discussion on fault-tolerant routing falls into
following three cases respectively.
3 If N is even and A = 1, ...,N/2 (a complete graph), the number of direct connections from node ibecomes 2|A| − 1 because node (i + N/2) and node (i − N/2) are actually the same node.
4 For a complete graph containing a even number of nodes in whichW = N/2, the number of neigh-boring nodes of each node becomes 2W − 1. The fault-tolerant routing in this case is trivial to discussbecause any source can take one-hop direct connection and other 2W − 2 two-hop node-disjoint con-nections to reach any destination regardless of the source and destination positions. Hence the followingdiscussion only focuses on circulant graphs in which each node has exactly 2W neighbors.
69

D=W
S=0
A
D>W
S=0
B
D<W S=0
C
Figure 4-2. Fault-tolerant routing for destination nodes with modulo index difference fromthe source node byW , greater thanW , and smaller thanW
Case 1: D = W . As shown in Figure 4-2(A), the firstW node-disjoint lightpaths can
be set up clockwise as follows:
0→ 1→ D
0→ 2→ D
...
0→W − 1→ D
0→ D
OtherW node-disjoint lightpaths are set up counter-clockwise as follows:
0→ N − 1→ N − 1−W → ...→ N − 1− (⌈N−1−WW⌉ − 1)W →W
0→ N − 2→ N − 2−W → ...→ N − 2− (⌈N−2−WW⌉ − 1)W →W
...
0→ N −W → N −W −W → ...→ N −W − (⌈N−W−WW
⌉ − 1)W →W
The idea of routing aboveW lightpaths is to make each lightpath stride over
the maximum number of nodes at each hop without hitting the same node that other
lightpaths may choose to pass through. The maximum striding can also minimize
the number of hops needed, which corresponds to a resource saving and connection
reliability improvement under certain link or node reliability. Obviously above 2W
lightpaths are node-disjoint and valid paths because there is no node overlap between
70

different paths except at the source and the destination. Figure 4-1(B) shows an
example of lightpaths setup for Case 1.
Case 2: W < D ≤ ⌊N/2⌋. As shown in Figure 4-2(B), firstW node-disjoint
lightpaths can be set up clockwise as follows:
0→ 1→ 1 +W → ...→ 1 + (⌈D−1W⌉ − 1)W → D
0→ 2→ 2 +W → ...→ 2 + (⌈D−2W⌉ − 1)W → D
...
0→W →W +W → ...→W + (⌈D−WW⌉ − 1)W → D
The otherW node-disjoint lightpaths are set up counter-clockwise as follows:
0→ N − 1→ N − 1−W → ...→ N − 1− (⌈N−1−DW⌉ − 1)W → D
0→ N − 2→ N − 2−W → ...→ N − 2− (⌈N−2−DW⌉ − 1)W → D
...
0→ N −W → N −W −W → ...→ N −W − (⌈N−W−DW
⌉ − 1)W → D
Similarly, above 2W lightpaths are also node-disjoint and valid paths. Figure 4-1(C)
shows an example of lightpath setup for Case 2.
Case 3: 0 < D < W . As shown in Figure 4-2(C), first 2W − D node-disjoint
lightpaths can be set up as follows:
0→ 1→ D
0→ 2→ D
...
0→ D
0→ D + 1→ D
...
0→W → D
0→ N − 1→ D
...
0→ N − (W −D)→ D
71

The first D paths are purely clockwise routed, followed byW − D clockwise
/counterclockwise routed paths and then byW − D counterclockwise/clockwise routed
paths.
Finally, the remaining D node-disjoint lightpaths can be developed in a way such
that each lightpath tries the biggest stride counter-clockwise until hits the group of nodes
indexed fromW + 1 toW + D. Then the direct connections from that group of nodes
to destination node D finalize the lightpaths setup. There are two scenarios in which
the D lightpaths hit the group of nodes indexed fromW + 1 toW + D in different ways,
as shown in Figures 4-3(A) and 4-3(B) respectively. The lightpaths setup is detailed as
follows.
D<W S=0
A
D<W S=0
B
Figure 4-3. Last D node-disjoint lightpaths setup for Scenario I and II (the “last-stop”node group and associated routing links are colored green)
Scenario I: [N − (W +D + 1)]%W ≤ [(N −W +D − 1)− (W +D + 1)]%W .
“%” is the modulo operator. The left-hand side represents the index distance that
the lightpath taking the biggest stride (W ) in its first hop, named as heading lightpath,
has from the nodeW + D + 1 before hitting the node group (indexed fromW + 1 to
W + D). The right-hand side represents the index distance that the lightpath taking the
smallest stride (W − D) in its first hop, named as tailing lightpath, has from the node
72

W + D + 1 before hitting the node group (indexed fromW + 1 toW + D). The equality
holds when D = 1, i.e., the heading lightpath becomes the same as the tailing lightpath.
We term the first distance as H and the second distance as T . This scenario states that
the last closest counterclockwise touch before hitting the node group is from the heading
lightpath and a stride of H + D will make all D lightpaths uniquely hit one node in the
node group. The D lightpaths are then developed as follows.
0→ N−W+D−1→ ...→ N−W+D−1−(⌈ (N−W+D−1)−(W+D)W
⌉−1)W →W+D → D
0 → N −W + D − 2 → ... → N −W + D − 2 − (⌈ (N−W+D−2)−(W+D−1)W
⌉ − 1)W →
W +D − 1→ D
...
0→ N −W → ...→ N −W − (⌈ (N−W )−(W+1)W
⌉ − 1)W →W + 1→ D
Scenario II: [N − (W +D + 1)]%W ≥ [(N −W +D − 1)− (W +D + 1)]%W .
This scenario states that the heading lightpath will run into the node group together
with other D −T − 1 successive lightpaths. The remaining T lightpaths can take a stride
of index distance D to uniquely hit the rest T nodes in the node group. The detailed D
lightpaths setup is as follows.
0→ N−W+D−1→ ...→ N−W+D−1−(⌈ (N−W+D−1)−(W+D)W
⌉−1)W →W+T → D
...
0 → N −W + D − T → ... → N −W + D − T − (⌈ (N−W+D−T )−(W+D)W
⌉ − 1)W →
W + 1→ D
0→ N−W +D−T−1→ ...→ N−W +D−T−1−(⌈ (N−W+D−T−1)−(W+D)W
⌉−1)W →
W +D → D
...
0→ N −W → ...→ N −W − (⌈ (N−W )−(W+D)W
⌉ − 1)W →W + T + 1→ D
From the discussion of 2W lightpaths development for case 3, it can be concluded
that they are also node-disjoint and valid paths. Figure 4-1(D) shows an example of
lightpath setup for Case 3.
73

Theorem 4.1. The circulant graph CN(1, ...,W ), whereW ∈ 1, ..., ⌊N/2⌋, is
both a 2W (or 2W − 1 for a complete graph consisting of an even number of vertices)-
edge-connected and a 2W (or 2W − 1)-vertex-connected graph.
Proof: The above redundant lightpath setup algorithm shows that there exist
2W (or 2W − 1) edge-disjoint paths between any pairs of nodes, so the removal of
arbitrary 2W − 1(or 2W − 2) edges cannot disconnect any node pairs and therefore
CN(1, ...,W ) is 2W (or 2W − 1)-edge-connected. In addition, since the 2W (or 2W − 1)
paths are also vertex-disjoint, which means no two paths share any nodes except the
source and destination, the removal of arbitrary 2W − 1(or 2W − 2) nodes cannot
disconnect any node pairs in the remaining graph and hence CN(1, ...,W ) is also
2W (or 2W − 1)-vertex-connected. 2
Therefore, based on above node-disjoint lightpaths setup algorithm, a
circulant-graph-based all-optical architecture can be established to satisfy
communication latency and fault tolerance requirements for designated numbers of
nodes and tolerable network faults (link or node faults).
4.3 Network Resource Utilization
In this section, we calculate link resource utilization for any source-destination
pairs with varied fault tolerance support indicated byW . Based on the results, we
derive wavelength requirement for all node pairs’ simultaneous communications
given wavelength conversion is provided, which is also the lower bound of achievable
wavelength number under the wavelength-continuity constraint.
The number of links through which 2W disjoint lightpaths connecting S and D pass
is the sum of the lengths of individual lightpaths as follows
LSD =
2W∑i=1
LiSD . (4–1)
Based on the disjoint lightpaths setup algorithm described in Section 4.2, LSD can
be further analytically derived by cases and scenarios defined in Section 4.2 as follows.
74

For non-complete CN(1, ...,W ):
LSD =W
⌊N −WW
⌋+ (N −W )%W + 3W − 2, for D =W (4–2)
LSD =W
(⌊N −DW
⌋+
⌊D
W
⌋)+ ((N −W )%W +D%W ) + 2W − 2, for D >W (4–3)
LSD =
⌈N − (W +D)
W
⌉D + 4W −D − 1, for D <W (Scenario I) (4–4)
LSD =
⌈N − (W + 1)
W
⌉D + [N − (W + 1)]%W + 4W − 2D − 1, for D <W (Scenario II)
(4–5)
For complete CN(1, ...,W ),
LSD = 2(N − 1)− 1, for all D (4–6)
Since CN(1, ...,W ) is symmetric in nature and the proposed lightpaths setup
algorithm applies to all sources regardless of their positions, the number of times that
the lightpaths developed for all-node communication pass through each link is the
same, which is also the number of required wavelengths for all-node simultaneous
communication given wavelength conversion is offered. Hence, the required wavelength
number is given by
V =
∑all S−D pairs LSD
NW=N2
∑all D LSD
NW=
∑all D LSD2W
, (4–7)
where NW is the number of links in CN(1, ...,W ).
Figure 4-4 shows the required numbers of links from the source (indexed by 0) to all
possible destinations in C16(1, ...,W ) with respect to differentW . First, it is observed
that the link requirement distribution across different destinations is fairly flat except for
the destinations index-close to the source. Secondly, also observed is that link utilization
increase for the same destination withW is comparably slow to the increase ofW
itself, which is due to larger strides that the source can take towards the destination if
W is increased. This unparallel increase actually results in a wavelength requirement
75

Figure 4-4. Link utilization for different destinations with respect to variedW (N = 16)
Figure 4-5. Wavelength requirement with respect to variedW for all-node simultaneouscommunication (N = 16)
decrease for all-node simultaneous communication as shown in Figure 4-5 Since the
number of available wavelengths ties with the complexity of the node structure, such
as the size of MUX/DEMUX and switching matrix, densely-connected CN(1, ...,W )
offers extra benefit in wavelength requirement besides network reliability gain. Further
wavelength reduction might resort to traffic grooming techniques, which is a subject of
future work.
76

4.4 Network Reliability Analysis
Both nodes and links may be subject to faults. We model the network faults via
associating a failure probability fN to each node and another failure probability fL
to each link under an assumption that all nodes and links fail in an independent
fashion. In addition, it is also assumed that a node failure will block all incoming and
outgoing communications. Thereby the probability of disconnection for a specific
source-destination pair can be derived as following:
PS/D disconnection = P(S/D disconnection | no fault on S and D) · P(no fault on S and D)
+ P(S/D disconnection |faulty S or D) · P(faulty S or D)
(4–8)
The four terms in the above equation are as follows:
P(S/D disconnection | no fault on S and D) =2W∏i=1
[1.0− (1.0− fL)L
iSD(1.0− fN)(L
iSD−1)
](4–9)
P(no fault on S and D) = (1.0− fN)2 (4–10)
P(S/D disconnection |faulty S or D) = 1.0 (4–11)
P(faulty S or D) = 1.0− (1.0− fN)2 (4–12)
Figure 4-6 shows how the disconnection probability for the source-destination pair
(0 → 8) in C16(1, 2) varies with different fN and fL. It can be observed that fN plays a
bigger role than fL in the disconnection probability because both source and destination
nodes are subject to node failures while the pressure of link failures is mitigated by
multiple disjoint lightpaths. The effects of differentW values on the connection reliability
can be observed in Figure 4-7 in which all nodes are assumed to be fault-free (fN = 0).
77

10−2
10−1
100
10−2
10−1
100
10−2
10−1
100
Probability of Node Failure (f−n)
Probability ofLink Failure (f−l)
Pro
babi
lity
of D
isco
nnec
tion
Figure 4-6. Disconnection probability change with fL and fN(N = 16,W = 2,S = 0,D = 8)
Figure 4-7. Disconnection probability change with fL for variedW (N = 16,S = 0,D = 8)
The disconnection probability decreases almost proportionally to the increase ofW in
the logarithmic scale, which demonstrates vast fault-tolerance performance improvement
by increasing network connectivity. The disconnection probability distribution for a
source with respect to all destinations across the network is shown in Figure 4-8. It
can be observed that the destinations with closer indices to the source are of higher
connection reliability because they can be routed to through more 2-hop lightpaths and
78

hence require a lower number of links in their disjoint lightpath setups, as shown in
Figure 4-4.
Figure 4-8. Disconnection probability distribution across the network(N = 16,W = 2,fL = 0.1)
In this chapter, we propose a circulant-graph-based all-optical WDM network
architecture and develop a node-disjoint fault-tolerant routing algorithm that offers
flexible fault-tolerance options. Both node failure and link failure are modeled and
probabilistic analysis results show evident reliability improvement with moderate link
resource increase. In future, we plan to develop a wavelength assignment method for all
node pairs’ communication with the proposed fault-tolerant routing algorithm under the
wavelength-continuity constraint.
79

CHAPTER 5TOPOLOGICAL OPTIMIZATION FOR SPARE-SHARING-BASED
WAVELENGTH-ROUTED ALL-OPTICAL NETWORKS
Wavelength Division Multiplexing (WDM) provides huge bandwidth potential
and design flexibility by arranging wavelengths to serve different traffic flows on the
same communication link. Wavelength-routed all-optical networks offer instantaneous
communication by avoiding the slow Optical-Electrical-Optical (OEO) conversion and
intermediate queuing in all switching nodes along the transmission path (lightpath). The
restriction of wavelength continuity throughout the path can be imposed to eliminate
wavelength conversion cost in the switching node [40]. However, the restriction also
increases Routing and Wavelength Assignment (RWA) difficulty [40]. In addition, in order
to protect the network against failures, it is desirable to design a fault-tolerant network
in which an arbitrary link failure can be tolerated without the loss of any communication
sessions.
In this chapter, we attempt to develop a low-cost one-link-failure-free network
topology that obeys wavelength continuity and is able to accommodate a required
number of traffic flows with a uniform number of wavelengths available on each link.
Although the resulting topological solution can be the choice of physical deployment,
it would also be applied to redefine the logical fiber-communication topology on the
existing physical infrastructure once single or multiple disastrous attacks (earthquakes,
hurricanes, floods, as well as electromagnetic pulses) happen to certain parts of the
network [3]. We call this topological adaptation to hazardous physical attacks, which
potentially affect a large geographical area. The traditional small-scale protections,
such as Shared Risk Link Group (SRLG) based schemes [20] [49], may not be fully
capable of tiding the communication over those unpredictable large-scale disasters. The
topological adaptation can be achieved by solving a topological optimization problem,
as studied in this chapter, according to the changed network resource provision. We
propose the use of the topological adaptation to respond to large-scale disaster-induced
80

resource outage and leverage the traditional shared-path-based protection to tolerate
normal single fiber link failures. Thereby, two protection levels addressing different
failure scales can be realized.
5.1 Spare-Sharing-Based Topological Optimization
Spare sharing provides opportunities to save wavelength and link resources [34]
[52], which results in a lower-cost topological solution. As shown in Figure 5-1, there
are two bidirectional flows A ↔ D and B ↔ D. Given only one wavelength, if no spare
sharing is applied, the topological solution to accommodate two working and two backup
paths must include links B − E and D − E (as shown in Figure 5-1(A)). However, the use
of these two links can be avoided by allowing the two backup paths to share the links
B − C and C −D (as shown in Figure 5-1(B)). B
A
D
C
E
A Without spare sharing
B
A
D
C
E
B With spare sharing
Figure 5-1. Topological solutions without and with spare sharing
As described in many shared-path protection based works [41] [21] [37], the routing
and wavelength assignment for the working and backup paths has to obey the following
rules:
1. The working path and its backup path for any flow request must be link-disjoint
2. No wavelength on the same link can be shared neither between two working
paths nor between a working path and a backup path
3. No two backup paths can share the same wavelength on the same link if their
working paths join each other anywhere in the network
The first rule ensures that at least one path (working or backup), for any flow,
can survive over any one link failure. The second rule avoids collision between two
81

working paths as well as enables a valid switch from a working path to its backup path
by guaranteeing availability of the backup path. The third rule prevents any two switches
from conflicting on their backup paths when a link failure disables two working paths.
The above rules on spare sharing can be demonstrated in Figure 5-2. Figure 5-2(A) is
a valid spare sharing example (on link B → E ) because the two working paths of flow
B → C and flow A → E are link-disjoint and hence any link failure over the network
cannot trigger both flows to switch. Figure 5-2(B) is an invalid spare sharing example
because the failure on link A → D would force both flows to switch and collision will
happen on their backup paths if the two backup paths share the same wavelength on
links A → B and B → C . Therefore, two separate wavelengths have to be used on the
two backup paths. B
A
D
C
E
A Valid spare sharing
B
A
D
C
E
B Invalid spare sharing
Figure 5-2. Validity demonstration of spare sharing
In general, the routing and wavelength assignment (RWA) problem without
involving fault protection is NP-complete [42]. When fault protection is considered,
the problem becomes even harder because the feasible solutions have to account
for backup resource allocation and are subject to more complicated constraints, as
shown in Integer Linear Program (ILP) formulations in Section 5.4. We anticipate
that the topological optimization problem studied in this chapter is NP-hard because
many of its sub problems have been shown to be NP-complete. For example, the
wavelength assignment in a Static Lightpath Establishment (SLE) problem is shown to
be equivalent to graph coloring and hence is NP-complete [13]. Besides, the routing
and wavelength assignment for a single working and backup path pair satisfying
82

spare-sharing constraints is also NP-complete [38] [57]. The studied topological
optimization problem requires all flow requests to be equipped with valid working and
backup path pairs at the lowest topological cost, and it hence is computationally more
complicated. The topological cost is defined as the total cost of the group of bidirectional
links included in the final topology.
5.2 Related Work
Past research on fault-tolerance-oriented topological optimization problems mainly
focused on minimization of total link cost on a general graph constrained on satisfaction
of either k-connectivity or a connection reliability threshold. The applied methods are
branch & bound based decomposition as in [27], approximation algorithms as in [68], or
evolutionary algorithms as in [55]. However, with respect to the topological optimization
for wavelength-routed all-optical networks, previously no specific work was involved to
the best of authors’ knowledge.
In the context of wavelength-routed WDM networks, the RWA problem has been
extensively studied [67] [7]. Since then, more and more focuses are given to fault
tolerance enhanced RWA problems. [41] provides a comprehensive classification in fault
tolerance schemes and shows the tradeoff among resource utilization and connection
reliability. [33] focuses on developing a set of traffic-pattern-aware link-disjoint
lightpaths to achieve lower connection blocking probability. [36] exploits primary-backup
multiplexing technique to allow a primary lightpath share wavelengths with one or
more backup lightpaths, in order to increase the number of established lightpaths at
the cost of reduced recovery guarantee. [56] applies flow aggregation to developing
computationally less complicated ILP formulations. However, the problems addressed
by those papers are based on a predetermined network topology and no topological
change can be made. Besides, in [41], the goal is to minimize the resource capacity
utilization defined as the total number of wavelength links. The optimum solution to the
problem may lead to very different wavelength requirements on different links. In our
83

work, we consider uniform wavelength provision on each link, which will render design
uniformity to the MUX/DEMUX logics for each node. Moreover, most of previous works
use a set of alternative routes that are predetermined in order to control the problem
size [41] [21] [37] [36]. However, we show, in Section 5.5, this decomposition does not
fit the nature of the topological optimization well and hence cannot lead to satisfying
performance. We jointly consider routing and wavelength assignment in one problem
whose optimal solution will perform better than the one without routing being considered
simultaneously.
5.3 Contributions and Chapter Organization
The major contributions of this chapter are listed as follows. First, we develop an
ILP model considering both routing and wavelength assignment, which fully exploits
the best possible solution to the studied spare-sharing-based topological optimization
problem. Second, we discern that applying traditional formulations, which base the
solutions on a set of predetermined alternative routes, cannot result in convincing
solutions by comparing to the greedy approach. Thirdly, we propose a two-phase
heuristic algorithm based on observation of the drawbacks of the greedy approach and
experimentally exhibit the efficiency of the algorithm.
The rest of this chapter is organized as follows: Section 5.4 provides an original ILP
formulation and a decomposed ILP formulation which is based on a set of k-shortest
disjoint routes. The performance of the decomposed ILP formulation is compared with
a greedy approach developed in Section 5.5. In Section 5.6, we propose a two-phase
heuristic algorithm to improve the performance of the greedy approach. The numerical
results and algorithm performance analysis are discussed in Section 5.7, where a
chapter summary is also provided.
5.4 Problem Formulation
In this section, to provide high-level insight in design constraints and objective,
we first introduce a matrix-based representation for the topological optimization
84

problem, considering both routing and wavelength assignment, for spare-sharing-based
wavelength-routed all-optical networks. Then, an equivalent ILP is developed to
model the problem in a form that can be processed by professional solvers such as
MOSEK1 . Finally, a k-shortest disjoint routing based ILP formulation that only considers
route selection and wavelength assignment is developed. The decomposition of the
problem into routing and wavelength assignment is also the traditional way to solve the
RWA-related problems [41].
5.4.1 Matrix-Based Representation
Table 5-1. Basic notationsNotation DefinitionN Number of nodesL Number of directed links in the complete graph of N nodes, i.e. N(N − 1)F Number of flow requestsW Number of provided wavelengths
The basic network parameters are listed in Table 5-1, based on which the following
parameterized matrices are defined.
P = [pij ]F×L and Q = [qij ]F×L
P and Q are flow-link incidence matrices for the working and backup paths respectively,
in which pij and qij indicate whether flow i passes through link j or not for the working
path and backup path respectively by taking on 1 or 0.
A = [aij ]W×F and B = [bij ]W×F
A and B are wavelength-flow incidence matrices for the working and backup paths
respectively, in which aij and bij indicate whether wavelength i is assigned to flow j or not
1 MOSEK is a large-scale mixed-integer linear program solver using a combination of the interior point,branch and cut technologies [1] [2].
85

for the working path and backup path by taking on 1 or 0.
D = [dij ]F×N
D is the flow-node incidence matrix in which dij = 1 if node j is the source of flow i and
dij = −1 if node j is the destination of flow i . Otherwise dij = 0. For a specific problem, D
is known and indicated by the flow setup.
G = [gij ]N×L
G is the node-link incidence matrix for a graph of N nodes and L directed links
(complete graph), in which gij = 1 if node i is the tail of link j , gij = −1 if node i is
the head of link j and gij = 0 if node i is not incident to link j .
In light of the above matrix definitions, the spare-sharing-based routing and
wavelength assignment rules together with path validity can be paraphrased equivalently
using the following matrix-based constraints:
1. Path validity for working and backup paths.
P × GT = D (5–1)
Q × GT = D (5–2)
“×” is a regular matrix multiplication operator.
2. Disjointedness of working and backup paths.
P +Q ≤ 1F×L (5–3)
1 is a F × L matrix in which all elements are 1.
3. Conflict avoidance between paths.
86

a. Working/working and working/backup conflict avoidance.
A× P + B ⊙Q ≤ 1W×L (5–4)
where “⊙” works as a regular matrix multiplication operator except that it uses
Boolean addition in which 1 + 1 = 1 when calculating elements in the resulting matrix.
b. Conflict avoidance between backup paths.
Here we introduce two matrices as below:
C = [cij ]F×F = P ⊙ PT
C is called the working path conflict matrix in which cij = 1 when the working path of
flow i joins the working path of flow j at least on one link.
Cij = [cijkm]F×L
Cij is induced from C and called the conflict possession matrix with respect to flow i
and flow j , where cijkm = 1 if k = i or j and cij = 1. Otherwise cijkm = 0. Therefore, the
backup/backup conflict avoidance is governed by the following inequality:
B × (Cij ∗Q) ≤ 1, for all i = j (5–5)
where “∗” is an element-to-element multiplication operator and Cij ∗Q represents the
induced flow-link incidence matrix in which only the path information of the two conflicted
flows is kept.
Finally, the objective function can be formulated through the last two steps as
follows:
T = max |G | (5–6)
minS · T (5–7)
87

where “max | |” operation selects all the links that are allocated in topology formation
and forms a link existence vector in which the existence of a link is denoted by 1 or
0. S is the link cost vector in which each element represents the cost of selecting the
corresponding link. The optimization goal is therefore to minimize the inner product S ·T ,
which corresponds to the topological cost.
5.4.2 Integer Linear Program Formulation
The matrix-based representation discussed in Section 5.4.1 fully considers routing
and wavelength assignment issues, and hence its optimal solution leads to the lowest
possible topological cost. Equivalent to the matrix-based representation, the topological
optimization problem can also be formulated into an integer linear program as follows.
Constants:.
• N: Number of nodes
• W : Number of provided wavelengths on each link
Indices:.
• i , j , k : Node index taking integers from 0 to N − 1
• s : Source node index taking integers from 0 to N − 1
• d : Destination node index taking integers from 0 to N − 1
• w : Wavelength index taking integers from 0 toW − 1
• b: Bidirectional link index taking integers from 0 to N(N − 1)/2− 1
Data:.
• cb: Cost of the bidirectional link b
Decision variables (integer):.
• x sdwij : Represent whether flow request s → d routes its working path throughwavelength w on unidirectional link i → j by taking on 1 or 0
• y sdwij : Represent whether flow request s → d routes its backup path throughwavelength w on unidirectional link i → j by taking on 1 or 0
88

Auxiliary variables (integer):.
• λsdw1 , λsdw2 : Represent whether the working and backup paths of flow s → d ,
respectively, take on wavelength w by taking on 1 or 0
• zb: Represent whether the working or backup path of any node pair passesthrough bidirectional link b by taking on 1 or 0
Model:.
min∑b
cbzb (5–8)
subject to following constraints:
1. Path validity and wavelength continuity for working and backup paths.
∑i
x sdwij −∑k
x sdwjk =
−λsdw1 , if s = j
+λsdw1 , if d = j
0, O.W .
(5–9)
∑i
y sdwij −∑k
y sdwjk =
−λsdw2 , if s = j
+λsdw2 , if d = j
0, O.W .
(5–10)
∑w
λsdw1 = 1 (5–11)
∑w
λsdw2 = 1 (5–12)
where λsdw1 and λsdw2 represent whether the working and backup paths of flow s → d
takes on wavelength w by taking on 1 or 0.
2. Link disjointedness between working and backup paths for the same flow
request.
89

∑w
x sdwij +∑w
y sdwij ≤ 1 (5–13)
3. Conflict avoidance between paths.
a. Working/working and working/backup conflict avoidance.
∑sd
x sdwij + y sdwij ≤ 1 (5–14)
b. Backup/backup conflict avoidance.∑w
x s1d1wi1j1+∑w
x s2d2wi1j1+ y s1d1wi2j2
+ y s2d2wi2j2≤ 3
s1d1 = s2d2 and i1j1 = i2j2
(5–15)
Equation (5–14) indicates that, on any wavelength of any link, either only one
working path or several backup paths are allowed to be allocated, which enforces
rules 2 and 3 mentioned in Section 5.1. Equation (5–15) makes the rule 4 hold in
which two backup paths cannot take the same wavelength on the same link (then
y s1d1wi2j2+ y s2d2wi2j2
= 2) if the corresponding two working paths join each other anywhere
(∑w xs1d1wi1j1
+∑w xs2d2wi1j1
= 2).
4. Inclusion of all bidirectional links, through which either working or backup paths
are arranged, into the final link set on which the topological cost is calculated.
x sdwij ≤ zb , x sdwji ≤ zb (i < j) (5–16)
and
y sdwij ≤ zb , y sdwji ≤ zb (i < j) (5–17)
b = i · N + j − (i + 2)(i + 1)2
, i < j
90

5.4.3 K-Shortest Disjoint Routing Based Formulation
Since the traditional way in the literature to solve the RWA-related problems (usually
based on a fixed topology) is to decompose the problem into the routing part and
the wavelength assignment part. In the routing part, k-shortest disjoint routing based
alternative routes are often applied. Although this problem decomposition shrinks the
feasible solution space (because of limited routing choices), the size of the problem
can be reduced to certain degree such that a small-scale problem may be optimally
solved. In order to evaluate the feasibility of decomposition to the studied topological
optimization problem, we develop a k-shortest disjoint routing based ILP as follows.
Constants:.
• W : Number of provided wavelengths on each link
• F : Number of flow requests
• K : Number of link-disjoint routes developed by the k-shortest path algorithm foreach node pair in the complete graph of N nodes
Sets:.
• Rl : Set of all possible routes passing through the unidirectional link l given by thek-shortest path algorithm for all node pairs
• R′
b: Set of all possible routes passing through the bidirectional link b given by thek-shortest path algorithm for all node pairs
Indices:.
• i : Node pair index taking integers from 0 to F − 1
• w : Wavelength index taking integers from 0 toW − 1
• r : Route index for a specific node pair taking integers from 0 to K − 1
• l : Unidirectional link index taking integers from 0 to N(N − 1)− 1
• b: Bidirectional link index taking integers from 0 to N(N − 1)/2− 1
Data:.
• cb: Cost of the bidirectional link b
91

Decision variables (integer):.
• uwir : Represent whether the working path of node pair i takes on route r onwavelength w by taking on 1 or 0
• vwir : Represent whether the backup path of node pair i takes on route r onwavelength w by taking on 1 or 0
Auxiliary variables (integer):.
• zb: Represent whether the working or backup path of any node pair passesthrough bidirectional link b by taking on 1 or 0
Model:.
min∑b
cbzb (5–18)
subject to following constraints:
1. Path validity and wavelength continuity (automatically satisfied ).
2. Link disjointedness between working and backup paths for the same flow
request.
∑w
uwir +∑w
vwir ≤ 1 (5–19)
∑r
∑w
uwir = 1 (5–20)
∑r
∑w
vwir = 1 (5–21)
3. Conflict avoidance between paths.
a. Working/working and working/backup conflict avoidance (on each unidirectional
link l , no wavelength w can be shared among more than one working paths or between
working and backup paths).
92

∑(i ,r)∈Rl
uwir + vwir ≤ 1, for (i , r) ∈ Rl (5–22)
b. Backup/backup conflict avoidance (for an unidirectional link l1, through which the
working paths of two node pairs i1 and i2 pass, the backup paths of these two node pairs
cannot share any wavelength w on any unidirectional link l2).
∑w
uwi1r1 +∑w
uwi2r2 + vwi1r3+ vwi2r4 ≤ 3
i1 = i2 , r1 = r3 and r2 = r4
(i1, r1) ∈ Rl1, (i2, r2) ∈ Rl1, (i1, r3) ∈ Rl2, (i2, r4) ∈ Rl2
(5–23)
4. Inclusion of all bidirectional links, through which either working or backup paths
are arranged, into the final link set on which the topological cost is calculated.
uwir ≤ zb , if (i , r) ∈ R′
b (5–24)
and
vwir ≤ zb , if (i , r) ∈ R′
b (5–25)
Table 5-2. Problem size exemplification: number of variablesNumber of flows 5 10 15 20 25 30
k = 2 135 255 375 495 615 735k = 3 195 375 555 735 915 1095k = 4 255 495 735 975 1215 1455k = 5 315 615 915 1215 1515 1815
Original ILP 1875 3735 5595 7455 9315 11175
5.4.4 Problem Size Exemplification
In order to provide insight in the size of the original problem formulated in Section
5.4.2 and the decomposed problem formulated in Section 5.4.3, we use an exemplar
network in which there are 6 nodes with 6 wavelengths on each unidirectional link, and
93

Table 5-3. Problem size exemplification: number of constraintsNumber of flows 5 10 15 20 25 30
k = 2 218 550 864 1190 1564 1872k = 3 379 1004 1779 2584 3473 4458k = 4 600 1830 3594 5352 7656 10284k = 5 947 3148 6783 10688 15649 21630
Original ILP 107620 476240 1105860 1996480 3148100 4560720
the bidirectional link costs are randomly generated between any pairs of nodes. For
each node pair, there are at most 5 link-disjoint routes and at least 2 link-disjoint routes
are needed for a flow request to route its working and backup paths. The numbers
of decision and auxiliary variables are shown in Table 5-2 whereas the numbers of
constraints are listed in Table 5-3 for different formulations and flow numbers. From the
tables we observe that the original ILP is of a huge size even for a small network, which
makes solving it almost unaffordable for any modern ILP solver [41] [7]. Comparably the
k-shortest disjoint routing based ILP formulations holding a few thousand variables and
constraints for a small network have better potential to be solved by an ILP solver.
5.5 A Greedy Approach
In this section, we develop a greedy approach to solve the topological optimization
problem which can be implemented by a low-order polynomial-time algorithm.
5.5.1 The Underlying Idea
We treat the potential network resource (links and wavelengths in the
completely-connected network) as a number (W ) of wavelength-associated graphs
on which wavelength-routed lightpaths can be established. For the studied topological
optimization problem, the goal is to find a group of bidirectional links that can
accommodate all flow requests at a cost as low as possible while satisfying all design
constraints specified in Section 5.1. The idea of the greedy approach is to, at each
iteration, search for and arrange a flow request which leads to minimum topological cost
increase until all flow requests are accommodated. The greedy approach makes the
94

path search tend to reuse those links that have been allocated but still hold assignable
wavelengths.
With respect to the order of working path and backup path arrangement, we choose
to arrange all the working paths before the backup paths are established. This is
because, under the spare-sharing scheme, the working paths dominate the resource
utilization and therefore, following the intuition, lower working paths resource utilization
is directly related to a better overall topological cost. Hence the resource allocation
priority should be given to working paths. Another advantage of prioritizing working
paths arrangement is that this can help working paths to pick up relatively short routes,
which makes working paths less vulnerable to link failures although this is not explicitly
included in the problem specification.
5.5.2 Data Structures
Wavelength-associated Adjacency Matrices for Working lightpaths (WAMW ): an
adjacency matrix tagged by a specific wavelength that contain elements indicating
assignment availability and cost of corresponding links on that specific wavelength for
working lightpath search. There are three possible values on which an element can take
during algorithm operation:
• Original cost: the real cost to set up a bidirectional link between two nodes,meaning that the link carrying this very wavelength has not been selected forrouting any path.
• Infinity: this value indicates that the wavelength on that specific unidirectional linkhas already been allocated and hence is not be available for allocation.
• Zero: this value indicates that a bidirectional link carrying this very wavelength hasalready been selected for routing some paths but this specific wavelength has notbeen allocated and is still available for allocation with no topological cost increase.
The algorithm starts with allWAMW s equal to the original adjacency matrix
in which each element takes on the cost of the original bidirectional link. As the
algorithm operates, the value of a matrix element, corresponding to a specific link
95

and a wavelength, may transit among three values according to transition diagram
shown in Figure 5-3. Figure 5-3. Element value transition diagram for WAMW.
Wavelength-associated Adjacency Matrices for Backup lightpaths (WAMB): defined
in the same way as above for working lightpaths. The only difference is in the value
transitions in which a link wavelength allocation for a backup path does not switch the
value to infinity but to zero because a later backup path has potential to reuse this
wavelength given that the spare-sharing RWA rules are followed, as shown in Figure
5-4. Figure 5-4. Element value transition diagram for WAMB.
Conflict Table (CT ): a square matrix of F × F elements, where F is the number
of flows and each element indicates whether the two working lightpaths of the two
flows are link-disjoint or not by taking on value 1 or 0. This table can be incrementally
established by checking confliction between the newly allocated working path and
allocated working paths.
96

5.5.3 The Algorithm
For each iterative working lightpath search, the Dijkstra shortest path algorithm is
applied directly on each of WAMWs and the ”shortest” path (corresponding to the one
leading to lowest cost increase) among all wavelengths is picked for candidacy among
all unsatisfied flow requests in that very iteration.
For each iterative backup lightpath search, the similar procedure as above for
working lightpath search is used except that the adjacency matrices on which the
Dijkstra algorithm works are not the WAMBs directly but are constructed from WAMBs
in the following way: make a copy from the WAMB on the corresponding wavelength,
set to infinities the elements corresponding to the unidirectional links through which
the under-search backup lightpath’s working lightpath passes, and also set to infinities
the elements of unidirectional links if they have already been allocated to other backup
lightpaths whose working lightpaths are not link-disjoint with the under-search backup
lightpath’s working lightpath (using Conflict Table). The pseudo code of the algorithm is
shown in Figure 5-5.
5.5.4 Performance Comparison
Table 5-4. Topological cost comparison among k-shortest path based ILP and thegreedy approach for a randomly generated network with 6 nodes and 6wavelengths on each link
Number of flows 5 10 15 20 25 30
k = 2 43.39∗ 51.67∗ 71.96∗ 79.36∗ 79.36∗ 87.08∗
k = 3 37.32∗ 42.61∗ 53.16∗ 53.16∗ 53.16∗ 53.16∗
k = 4 37.32∗ 40.14∗ 40.14∗ 45.76∗ 45.76∗ 45.76∗
k = 5 36.66∗ 40.14∗ 43.89∗ 45.76∗∗ 45.76∗∗ 45.76∗∗
Greedy 25.15 25.15 32.54 44.88 44.88 52.60Greedy+PER 20.99 20.99 32.54 32.54 35.82 41.21
∗ Optimal solutions for k-shortest disjoint routing based ILP formulations∗∗ The best results (all within 3.08% relative gap to the best possible solutions) after running MOSEK for 8hours. The solving process is shown in Figure 5-6 that demonstrates the converging process of both theobjective function value and the relative gap for the three ILP instances
97

Algorithm: GreedySearch1. procedure GreedySearch(WAMWs,WAMBs)2. //Search for working lightpaths3. for i = 0 to F − 14. LowestCostW ←∞5. for j = 0 to F − 16. if the j th flow request is not satisfied7. for k = 0 toW − 18. run Dijkstra’s algorithm onWAMWs[k ]9. if resulting cost < LowestCostW
10. LowestCostW ← resulting cost11. set flow j as candidate flow and record resulting path and wavelength k12. end if13. end for14. end if15. end for16. mark the candidate flow as satisfied17. update elements ofWAMWs andWAMBs corresponding to links on the
allocated path according to transition diagram in Figure 5-318. end for19. form the working path conflict table CT20. //Search for backup lightpaths21. for i = 0 to F − 122. LowestCostB ←∞23. for j = 0 to F − 124. if the j the flow request is not satisfied25. for k = 0 toW − 126. construct adjacency matrix as described in Section 5.5.327. run Dijkstra’s algorithm on the constructed adjacency matrix28. if resulting cost < LowestCostB29. LowestCostB ← resulting cost30. set flow j as candidate flow and record resulting path and wavelength k31. end if32. end for33. end if34. end for35. mark the candidate flow as satisfied36. update elements ofWAMBs corresponding to links on the allocated path
according to transition diagram in Figure 5-437. end for38. output all developed working and backup lightpaths39. end procedure
Figure 5-5. Pseudo code of the greedy approach
98

Figure 5-6. Solving process for the three ILP instances without reaching optimality afterrunning MOSEK for 8 hours
Table 5-4 shows the performance comparison between the greedy approach and
the k-shortest disjoint routing based ILP formulations2 for the network exemplified
in Section 5.4.4. The k disjoint routes for each flow request are developed using the
path-augmentation-based disjoint routing algorithm which generates k link-disjoint routes
between a node pair with minimum total link cost [54] [65] [22]. Due to the overwhelming
size of the original ILP as shown in Section 5.4.4, the corresponding extremely large
memory requirement makes solving the original ILP formulation almost impossible. The
results listed in the last row are from an algorithmic combination of the greedy approach
and a solution perfection process (PER) which will be discussed in the next section.
First, we observe that, in general, the higher number of alternative routes (k) leads
to lower topological cost because the flow requests can have more choices in picking
2 All the k-shortest disjoint routing based ILP instances are solved by MOSEK 5.0.0.90 on the NEOSserver with 8 hours running time limit.
99

routes for their working and backup paths. The only exception happens to the instance
with 15 flow requests in which 5 alternative routes result in a higher topological cost
than 4 alternative routes. This is because the 4 alternative routes are not necessarily
a subset of the 5 alternative routes between a node pair and hence the solution space
for 4-shortest routing based ILP is not necessarily a subset of that for 5-shortest routing
based ILP. Actually, by the definition of k-shortest disjoint routing, the total cost of 4
shortest disjoint routes should be lower than or at most equal to the cost of any of 4
disjoint routes out of the 5 shortest disjoint routes, which also makes this exception
possible. Second, we can observe that the solutions of the greedy approach on average
are much better than those of k-shortest disjoint routing based ILP formulations. The
reason for that is the k shortest routes are developed based on a connectivity-rich
topology (usually a complete graph if any two nodes can have a direct connection) than
the topology assumed to be fixed by most of previous works. Thereby the disjoint routes
developed for different node pairs may have less chance of being overlapped and hence
a higher number of links are expected to be included into the topological solution. This
shows that the traditional alternative routes based methods are not efficient in solving
the topological optimization problem. Lastly, by taking the greedy solution as an initial
solution, a perfection process can improve the results to a great extent, showing that
there still exists considerable improvement space, which will be further explored by
heuristics discussed in the next section.
5.5.5 Approximation Ratio Analysis for Working Paths Allocation under Ade-quate Wavelength Provision
Since in general the working paths dominate resource utilization compared
with the backup paths, as shown in Section 5.7, we derive an approximation ratio
analysis for resource allocation of working paths to capture the optimality of the greedy
approach. We assume that there are adequate wavelengths on each links, i.e., at least
F wavelengths are provided. The optimal topological cost is denoted by OPT . The
100

topological cost of the greedy solution is denoted by Costgreedy . Let P1, P2, ..., PF be the
working paths that the greedy approach develops for the F flow requests in the order
of being generated. For path Pi , we define Price(Pi) as the topological cost increase
after generating working path Pi . We also define the optimal topological cost increase to
generate working paths for the rest flow requests after P1, ..., Pi−1 have been developed
by the greedy approach as OPT ′
i . Since Cost(Pi) leads to the optimal cost increase for
the working path Pi , we have
Price(Pi) ≤ OPT′
i . (5–26)
In addition, since OPT ′
i is the optimal cost increase for the subset of flow requests i ,
..., F under the cost-reduced graph (the costs of the links on which the paths developed
by the greedy approach are reduced to 0), we also have
OPT′
i ≤ OPTi ≤ OPT , (5–27)
where OPTi represents the induced topological cost of flow requests i , ..., F in the
optimal solution.
Hence, finally we have
Costgreedy =
F∑i=1
Price(Pi) ≤F∑i=1
OPT′
i ≤F∑i=1
OPTi ≤F∑i=1
OPT = F ·OPT (5–28)
and
CostgreedyOPT
≤ F (5–29)
5.5.6 Complexity and Memory Requirement Analysis
By observing the structure of the algorithm, we find that, when an O(N2) Dijkstra’s
algorithm is applied, the computational complexity of the algorithm is O(F 2WN2), where
F is the number of flow requests,W is the number of available wavelengths and N is the
101

number of nodes. With respect to the memory requirement, a working space in the order
of O(WN2 + F 2) is needed for algorithm operation which comes from two dominating
data structures: wavelength-associated adjacency matrices and the conflict table.
5.6 Enhanced Heuristics
In the section, we first identify two drawbacks of the greedy approach that may
prohibit it from achieving better performance in certain scenarios. Based on the
drawback analysis, we propose two approaches featuring different initial solution
generation to the topological optimization problem. Then, we develop a perfection
process working on the generated initial solutions with the goal of lowering the
topological cost of the initial solutions. The combination of the initial solution generation
and the perfection process forms the proposed heuristic algorithm as the first and the
second phases respectively.
5.6.1 Drawbacks of the Greedy Approach
Since the greedy approach, described in Section 5.5, only pursues the
iteration-wide optimality, there exists potential for it to lose global optimality. Figure
5-7(A) shows a network that still has two flow requests (A → C and B → D) to which
resource needs to be assigned. We assume that all the links missing in the figure either
run out of wavelength resource or cost too high to be considered. The dashed links refer
to those links on which no wavelength is assigned to any flow. The solid links represent
those links that have been assigned but still hold available wavelengths. We also
assume that each link in the figure has at least 2 available wavelengths for allocation.
There are two values on each link. The first indicates the current cost increase by
routing through the corresponding link and the second (in the parentheses) indicates the
original cost of the bidirectional link.
The greedy approach will find route A → C for flow request A → C and then find
route B → A→ C → D for flow request B → D, as shown in Figure 5-7(B), which results
in cost increase 17 + 8 + 8 = 33. However, if we make the flow A → C take on the route
102

B A
D C
E
F
8(8)
8(8)
17(17) 17(17) 18(18)
0(1) 0(1)
0(1) 0(1)
A
B A
D C
E
F
0(8)
0(8)
0(17) 17(17) 18(18)
0(1) 0(1)
0(1) 0(1)
B
Figure 5-7. Original greedy approach solution.
A → E → F → C and make the flow B → D take on the route B → E → F → D,
the cost will be only increased by 18. This example illustrates myopia of the greedy
approach under certain scenario.
Besides potential miss of global optimality, the greedy approach tends to route
paths in a “zigzag” way in order to reuse those allocated links as shown in Figure
5-7(B) in routing flow request B → D. Such a routing fashion makes the routes more
likely be “twisted” together, which not only potentially leads to higher overall resource
consumption but also renders difficulty to improving the solution in dissolving the
“twisted” situation. For example, the two routes coupled on link A → C are not easy
to be “moved” to their optimal positions compared with the scenario in which they are
separate and routed close to their shortest paths. The way to “move” (or reroute) paths
will be discussed in Section 5.6.3.
5.6.2 Two Initial Solutions
In order to assist the routing process of the original greedy approach to identify
right paths for routing flow requests, we propose using the link potential ρl , a numerical
factor ranging from 0 to 1, to evaluate the potential that a link should be included into
the topological solution. The underlying idea is that the link, by routing through which
the paths are closer to their shortest paths in length, should have higher potential to be
103

picked for allocation. As we can see in Figure 5-7(A), although flow A→ C favors picking
link A → C , flow B → D does not because route B → A → C → D is much longer
than the shortest route (B → D) of flow B → D. However, link E → F can balance the
closeness requirement of both flow A → C and flow B → D to their shortest paths. If
link E → F can be picked for routing flow A → C , the resulting routes of the two flow
requests will become optimal, as shown in Figure 5-8(B). B A
D C
E
F
(8)
(8)
136/33 27/10
0(1) 0(1)
0(1) 0(1)
136/33 (17) (18) (17)
A
B A
D C
E
F
(8)
(8)
(17) (17) 0(18)
0(1) 0(1)
0(1) 0(1)
B
Figure 5-8. Link potential based greedy search solution
We first define flow-associated link potential, ρfl , as the ratio of the original path cost
pcf of routing the flow in the original network to the original path cost pc ′f of routing the
flow through the unidirectional link l under current network resource condition. pc ′f can
be decomposed into three parts: the cost of routing the flow from its source to the tail
node of link l pc ′f 1, the cost of link l cl , and the cost of routing the flow from the head
node of link l pc ′f 2 to the destination.
ρfl =pcf
pc′f
=pcf
pc′f1+ cl + pc
′f2
(5–30)
We define link potential, ρl , as the average of ρfl over flows that still wait for routing
and resource allocation, as following
ρl =1
F ′
∑f
ρfl , (5–31)
104

where F ′ represents the number of unassigned flow requests. Since pcf is the shortest
path cost in the original network, ρfl is a value smaller than or at most equal to 1, so is
ρl . Intuitively, ρl with a higher value indicates link l , on average, is closer to the shortest
paths of unassigned flow requests and hence should have higher potential to be
selected. This is because the close-to-shortest routes can help save network resource
and, combined with the greedy search, eventually may lead to a lower topological cost.
In the shortest path search algorithm, the link with lower cost has higher potential to
be selected into the shortest path. Hence, we define link cost coefficient, αl , as
αl = 1− ρl (5–32)
and use the product of αl and the link current cost to replace the link cost used in the
greedy search algorithm. In this way, we integrate the use of link potential into the
greedy search algorithm and we call the new algorithm link potential based greedy
search. Still take the network shown in Figure 5-7(A) for example, under the current
network resource condition, flow A → C costs 17 and flow B → D costs 33 to route
through link A → C . The shortest path costs of both flow A → C and flow B → D
are 17 in the original network. Hence ρA→C = (17/17 + 17/33)/2 = 25/33 and
αA→C = 1 − 25/33 = 8/33. The cost of link A → C is replaced with 178/33 = 136/33.
Follow the same process, the costs of link B → D and link E → F are replaced with
136/33 and 27/10 respectively. The updated network with new link costs is shown in
Figure 5-8(A). The costs of the rest links are not shown because they do not affect the
routing decisions. Apply the greedy algorithm onto the new network shown in Figure
5-8(A). Then route A → E → F → C becomes the decision route instead of the original
route A → C . After that flow B → D would pick up route B → E → F → D, instead of
route B → A → C → D, because of zero cost increase. The resulting routes are shown
in Figure 5-8(B), which is optimal for the two flow requests.
105

With respect to the second drawback identified in Section 5.6.1, we propose another
modification on the original greedy search algorithm with the aim to avoid generating
“zigzag” paths. Instead of trying to change the link costs as in link potential based
greedy search, at every iteration, the algorithm selects the flow request that leads to the
largest path ratio. Path ratio is defined, with respect to a specific flow request, as the
ratio of the shortest path cost in the original network to the cost of the shortest route
developed in the greedy search algorithm on the current network. This flow selection
order tends to select the route that is close to its shortest path in length and hence can
avoid generation of those “zigzag” paths to a great extent. We call this modified search
largest ratio first (LRF) search.
Take the example as shown in Figure 5-9(A), we assume wavelength resource on
link A → C are all assigned and hence link A → C is not shown in the figure. The
original greedy approach will find route A→ G → C with cost increase 9 for flow request
A → C and then route flow request B → D through B → A → G → C → D, as shown
in Figure 5-9(B). The resulting two routes are closely coupled together on many links
away from their shortest paths. However, LRF search will select route B → D for flow
request B → C and then route flow request A → C through A → G → C , as shown in
Figure 5-9(C). This is because, instead of pursuing minimum cost increase, LRF search
renders priority to selecting the route closer to its shortest path. Although LRF search
induced routing leads the cost to be increased higher (by 17 + 9 = 26) than the original
greedy search (by 9 + 8 + 8 = 25), the potential to move the two loosely coupled routes
to their optimal positions would be higher. The detailed routes “moving” procedure will
be discussed in the next subsection.
5.6.3 Solution Perfection (PER)
The solutions generated by the original greedy approach, link potential based
greedy search, and LRF search can be used as initial solutions and we propose
a solution perfection process working on those initial solutions. The initial solution
106

B A
D C
E
F
8(8)
8(8)
0(9)
17(17) 18(18)
0(1) 0(1)
0(1) 0(1)
G
9(9)
A
B A
D C
E
F
0(8)
0(8)
0(9)
17(17) 18(18)
0(1) 0(1)
0(1) 0(1)
G
0(9)
B
B A
D C
E
F
8(8)
8(8)
0(9)
0(17) 18(18)
0(1) 0(1)
0(1) 0(1)
G
0(9)
C
Figure 5-9. Largest ratio first based search solution
generation and the perfection process are two phases of the heuristic algorithm
proposed in this section.
The idea of the perfection process is trying to reroute all the flows passing through
a specific bidirectional link by leveraging the rest of unassigned network resource. If the
rerouted solution leads to a lower topological cost, the rerouted solution becomes
the new solution. This process will continue on another bidirectional link until no
improvement can be achieved by rerouting the flows on whichever bidirectional link.
The pseudo code of the perfection algorithm is listed in Figure 5-10.
5.7 Results
In this section, we evaluate the performance of the proposed heuristic methods
proposed in the last section. The advantage of applying spare sharing techniques in
resource saving is also shown. Finally, by defining performance indicator, we reveal the
underlying reason for performance different resulting from varied algorithm options.
5.7.1 Performance Comparison
We use an exemplar network in which 16 US major cities, as shown in Figure 5-11,
are treated as nodes and the bidirectional link costs are assigned to be proportional
107

Algorithm: Perfection1. procedure Perfection(init solution,WAMWs,WAMBs, CT )2. current solution ← init solution3. do4. improvement ← 05. for each assigned bidirectinal link l6. TWAMWs ←WAMWs, TWAMBs ←WAMBs, TCT ← CT7. release wavelength resource along working and backup paths passing
through bidirectional link l by updating TWAMWs and TWAMBs8. reroute the working paths through rest of network, update TWAMWs,
TWAMBs, and TCT9. reroute the backup paths following all spare-sharing constraints through rest
of network, update TWAMWs and TWAMBs10. if rerouting is successful11. calculate resulting topological improvement12. if resulting improvement > improvement13. improvement ← resulting improvement14. update current solution15. end if16. end if17. end for18. if improvement > 019. WAMWs ← TWAMWs,WAMBs ← TWAMBs, CT ← TCT20. end if21. while improvement > 022. output current solution23. end procedure
Figure 5-10. Pseudo code of the perfection algorithm (PER)
to the distance between cities 3 . Each node is required to establish communication
to all other nodes in the network, which indicates the number of flows requests is
16× (16− 1) = 240.
3 In case of disaster-induced link failures, the corresponding link costs are set to infinity in order to re-flect the changed network resource condition. Thereby the resulting topology solution will avoid utilizingany of the links affected by the disaster. In this chapter, focusing purely on performance comparison forthe topological optimization problem among different algorithms, we do not model and consider a specificset of link failures. This will be the focus of future work.
108

Figure 5-11. Locations of 16 US major cities
We test the above problem configuration via the original greedy approach (Greedy),
link potential based greedy search (Potential), largest ratio first search (LRF), and
the combinations of those approaches and the perfection process (Greedy+PER,
Potential+PER, and LRF+PER). The solutions of the approaches other than the original
greedy approach are compared with the initial greedy solutions and their improvements,
defined as
ImprovementX =Topological Costgreedy − Topological CostX
Topological CostX, (5–33)
are recorded, where X represents the approach used for comparison. The results, with
different wavelength provision, are shown in Figure 5-12. As we can observe, except
the solutions of LRF, all other approaches in general lead to better performance than
the original greedy approach. In terms of initial solutions, link potential based greedy
search on average produces the lowest-cost topological solutions. With respect to the
final solutions, all PER-induced solutions are much better than their corresponding
initial solutions. The LRF+PER induced solutions, with improvement of 20% 30% from
the greedy solutions, outperform all other solutions although the initial LRF-induced
solutions are worse than the corresponding greedy solutions. This is because the initial
109

LRF-induced solutions are better shaped in terms of ”twisting” condition, which makes
the PER easier to reroute the flows to their optimal positions.
Figure 5-12. Performance improvements from greedy solutions due to heuristicalgorithms for varied wavelength provisions
Figure 5-13. Convergence process of the perfection algorithm taking three differentinitial solutions
Figure 5-13 demonstrates the convergence process of the perfection algorithm
taking the Greedy, Potential, and LRF solutions as initial solutions for the problem
configuration with 5 wavelengths available on each link. It shows that Potential can
produce the lowest initial solution whereas the initial solution of LRF is very costly and
110

however it has higher potential to be “perfected” by running the perfection algorithm after
a large number of iterations.
Figure 5-14. Weighted wavelength/link utilization for working and backup lightpaths inthe LRF+PER induced topological solutions
Figure 5-14 illustrates the benefit of applying spare sharing techniques in resource
saving. The weighted wavelength/link utilization is defined as
U =
∑l
∑w O
lw · Cl∑
lW · Cl, (5–34)
where Cl is the cost of the unidirectional link l and O lw indicates if the wavelength w on
link l is occupied or not by taking on 1 or 0. This utilization takes on value between 0 and
1, and the higher value indicates more efficient resource utilization. Since on wavelength
on the same link can be shared between working and backup paths, the total weighted
resource utilization can be decomposed into working path utilization and backup path
utilization, as indicated by the blue and red bars in Figure 5-14. The advantage that
the backup paths can share wavelengths among each other makes backup resource
utilization extremely low compared with resource utilized by working paths, especially
considering the fact that the working paths are routed before the backup paths and
hence they can take comparably shorter routes. The trend that the backup resource
111

utilization is increased with the number of available wavelengths is observed. This
is because the network topology becomes “thinner” (including less number of links
when increasing the number of wavelengths, as shown in Figure 5-14) and the spare
sharing constraints start playing a heavier role in routing the backup paths. For the
same reason, the narrower routing choices for both working and backup paths make the
overall wavelength/link utilization decrease with the number of wavelengths.
5.7.2 Performance Indicator
In order to better discern how differently algorithms perform, we identify two
essential factors that can indicate the solution performance for the topological
optimization problem. One is the weighted resource utilization U as defined in the
last subsection and another is average bending factor B, defined as
B =1
2F
(∑f
pcfpwf+∑f
pcfpbf
), (5–35)
where pcf is the shortest path cost of flow f , pwf is the solution working path cost of flow
f , and pbf is the solution backup path cost of flow f . The average bending factor shows
how far on average the solution paths deviate (or “bend”) from their shortest paths.
A value close to 1 signifies that the solution paths are in cost close to their shortest
paths and hence are individually cost-efficient in wavelength utilization, whereas a value
towards 0 indicates the solution paths are costly routed.
Intuitively, an ideal topological solution (best-possible or lower-bound solution)
would fully utilize the wavelength in the solution topology with all paths routed through
their shortest paths. Hence, a topological solution having high wavelength utilization
and high average bending factor simultaneously would lead to good performance (low
topological cost.) Thereby we define performance indicator of the topological solutions
as
PI = B · U . (5–36)
112

Figure 5-15. Solution performance indication for the network with 5 wavelengthsprovision
The validity of this definition (logical correspondence between PI values and
topological costs) is verified by observing Figure 5-15 in which the performance indicator
values and topological costs resulting from different algorithms are shown. As observed,
the highest PI appears with the LRF+PER induced solution that leads to the best
performance, whereas the lowest PI happens on the initial solution of LRF that is
worst-performed among the comparing approaches. PI corresponding to the initial
greedy solution is the lowest, indicating the highest topological cost of the initial greedy
solution. Also observed is that all PIs corresponding to PER-enhanced solutions are
higher than PIs of their initial solutions.
Figure 5-16 shows more details on how the topological solutions from different
algorithms are distributed with respect to weighted wavelength utilization and average
bending factor. In general, the LRF induced solutions have higher average bending
factors. The reason for LRF+PER to perform the best is in that its solutions score high
in both weighted wavelength utilization and average bending factor compared with other
algorithms. The PER induced improvement for the greedy search and link potential
113

Figure 5-16. Weighted wavelength utilization / average bending factor distribution forvaried topological solutions in the networks with 5, 10, 15, 20, and 25wavelengths provision
based greedy search is because the PER process improves the wavelength utilization
by rerouting paths without degrading the “bending” situations.
In this chapter, we focus on understanding the complexity of the topological
optimization problem for spare-sharing based all-optical networks by studying its ILP
formulation. Next, due to computational difficulty of solving reasonably large problems
through ILP formulation, our effort is dedicated to searching algorithmic solutions
to the problem. We first develop a greedy search algorithm whose performance is
verified to be better than the traditional RWA methods based on routing and wavelength
assignment decomposition. Then we propose a two-phase heuristic algorithm in which
two different initial solution search approaches are developed. Through exhibiting results
on an exemplar network, the goodness of the proposed heuristic algorithm is verified by
comparing with the greedy solutions. Finally, a metric, performance indicator, is defined
114

and verified to reveal the underlying reason of performance difference from varied
algorithms.
115

CHAPTER 6ORDERED-PATH-ENUMERATION-BASED CANDIDATE ROUTING: A FACILITATING
APPROACH TO SOLVING RWA PROBLEMS FOR OPTICAL NETWORKS
As the study of routing and wavelength assignment (RWA) problems migrates from
solving single lightpath establishment problems to dealing with protective (spare)
lightpath setup in order to tolerate network faults, the hardness of solving those
problems rises dramatically. This is not only because of the extra decision variables
created for the protective lightpaths, but also due to much more complicated constraints
generated to avoid resource conflict and enforce path-disjointedness between the
working and spare lightpaths. The combined effect is the creation of huge constraint
matrices associated with the optimization models for those RWA problems, which
severely challenges the capacity of storage systems and the computational power of
current state-of-the-art machines.
To relax the hardness of fully solving those problems to their global optimality,
researchers traditionally decouple the problems into the routing part and the wavelength
assignment part [41, 67]. By potentially sacrificing the global optimality, the size of
two subproblems can be well controlled for networks of a moderate size. Actually,
often for a specific RWA problem, there exists an intrinsic coupling relation between
the routing part and the wavelength assignment part in order for the problem to be
solved close to its global optimality. In this chapter, we are especially interested in
those RWA problems that are designed to protect the network in a shared-path fashion
[21, 36–38, 41, 57]. The routing parts of those problems are traditionally solved by
searching for a set of link-disjoint paths as routing candidates, because otherwise the
working and spare lightpaths would be subject to simultaneous failures induced by the
fault on the link shared between them. Then the wavelength assignment part takes
those routing options as working and spare lightpath candidates for best wavelength
resource arrangement. The classic link-disjoint path search widely applied in the
116

literature is k-shortest link-disjoint routing [22, 54], which finds k link-disjoint paths (if
exist) in a directed graph with the lowest total link cost.
However, we will show in this chapter that the paths developed by k-shortest
link-disjoint routing may not best fit the coupling relation between the two subproblems
because of two major reasons: (1) the amount of disjoint paths developed may not
be enough for less-densely connected networks, and (2) the sets of disjoint paths
for different flow requests may not be the best options for the problem as a whole.
In fact, in order to find the best set of candidate routes, the set of possible paths for
routing selection has to be sufficiently large. In this chapter, we propose a new path
enumeration algorithm which can find a pre-described number of paths in an increasing
order of cost for a specific node pair. Based on the pool of enumerated paths, certain
selection rules are applied to form candidate routing sets of a proper size for wavelength
assignment optimization.
6.1 Related Work
The shared-path protection scheme has been investigated in many works, such as
in [21, 36–38, 41, 57], with different problem setups. Both mathematical programming
based formulations [37, 41] and algorithmic heuristics [21, 36, 38, 57] have been applied
to solve the problem. It has been proved in [38] that establishing a single working/spare
lightpath pair is an NP-complete problem. Fully solving the RWA problem for all flow
requests becomes prohibitive even for a small-size network. Hence, k-shortest disjoint
routing is widely applied as the routing solution [41]. However, in [33], the authors
observe that the lack of awareness of the real traffic pattern by k-shortest disjoint routing
leads to a poor connection success rate. It is indicated that the candidate routing set
should be developed in a problem-dependent fashion.
The study on path enumeration (commonly called k-shortest path enumeration)
dates back to Yen’s and Lawler’s algorithms [30, 65]. The basic idea of those algorithms
is to partition the searching space (all un-enumerated paths) into mutually exclusive
117

subsets based on the enumerated paths, and the next enumerated path is picked as
the shortest one from among all those subsets. [12] provides a comparative study over
seventy related works and concludes Lawler’s method gives the best performance
when considering only acyclic paths and directed graphs. Cyclic-path-allowed path
enumeration is studied in [15]. A more recent work in [25] leverages the replacement
paths algorithm and applies it to work with the shortest path branching structure, which
leads to a factor-Θ(n) improvement when the replacement paths rarely fails. [50, 58]
further consider path enumeration under a set of constraints.
6.2 Contributions and Chapter Organization
The major contributions of this chapter are as follows. First, we formally propose a
new path enumeration algorithm based on a series of theoretical derivation. Second, we
develop a candidate routing scheme to find candidate routing sets that best fit specific
problems. Third, by formulating and solving two concrete RWA problems, we numerically
show evident potential of the path-enumeration-based candidate routing in improving
resource allocation performance.
The rest of this chapter is organized as follows: Section 6.3 describes the proposed
ordered path enumeration algorithm. The candidate routing scheme is discussed in
Sections 6.4 and 6.5, where two specific RWA problems are studied for performance
illustration.
6.3 Ordered Path Enumeration
This section formally describes the ordered path enumeration algorithm that we
propose to develop a pool of possible paths for candidate routes selection.
6.3.1 Definition of Terminologies
Network : denoted by G(N,L), where N is a set of nodes and L is a set of directed
links composing the network.
Ordered Path Container : denoted by Pk(s, d), a sequence of k shortest paths
connecting the source s and the destination d in an increasing order of cost (or length)
118

in which the first path p1 is indeed the shortest path among all possible paths, the
second path p2 is the second shortest path, ..., and the k th path pk is the k th shortest
path. We call it container for short in the rest of the chapter if the context is clear. We
also assume that all the paths in Pk(s, d) are loop-free because it is of no benefit
to consider the paths with loops for the resource allocation problems studied in this
chapter.
Ordered Path Container Cover : denoted by C(Pk(s, d)), a group of directed links
whose removal from the network leads all the paths in the container Pk(s, d) to be
broken. We call it container cover in the rest chapter if the context is clear.
Minimal Ordered Path Container Cover : denoted by C(Pk(s, d)), a group of directed
links that is an ordered path container cover but is not an ordered path container cover
anymore if any link in the group is removed.
Complete Minimal Container Cover Set: denoted by S(Pk(s, d)), the complete set
of all possible C(Pk(s, d)) that contain minimal numbers of directed links to cover the
ordered path container Pk(s, d).
Complete Covering Link Set: denoted by L(Pk(s, d)), the complete set of directed
links that cover at least one path in Pk(s, d) (i.e., the set of directed links taken by the
paths in Pk(s, d)).
6.3.2 Theorems regarding Ordered Path Enumeration
Theorem 6.1. (k-shortest Path Enumeration) Given the ordered path container
Pk(s, d), Pk+1(s, d) can be formed by adding the (k + 1)th shortest path that is ob-
tained by selecting the shortest path among shortest paths of the networks induced by
removing all links in C(Pk(s, d)) from the original network G(N,L).
Proof: Assume that pk+1 is the (k + 1)th shortest path from s to d in the original
network. According to the uniqueness of path pk+1 and the assumption that all the paths
considered are loop-free, along each path in Pk(s, d) there must be at least one link
not belonging to path pk+1. Then we group those links into a set which by definition
119

becomes an container cover C(Pk(s, d)). Clearly, there must exist a minimal container
cover C(Pk(s, d)) as a subset of C(Pk(s, d)). Since pk+1 is a valid path in the network
induced by C(Pk(s, d)), in which however all paths in Pk(s, d) are not valid, and pk+1
is the (k + 1)th shortest path in the original network, pk+1 must be the shortest path of
the network induced by C(Pk(s, d)). In other words, the (k + 1)th shortest path pk+1
can be found among the shortest paths of the networks induced by all C(Pk(s, d)) of
S(Pk(s, d)). 2
Theorem 6.1 indeed shows a way to enumerate the paths for a specific
source-destination pair, starting from the first shortest path, in an increasing-cost
order.
Lemma 6.1. Any minimal container cover C(Pk+1(s, d)) in S(Pk+1(s, d)) must
contain a subset that is a minimal container cover C(Pk(s, d)) in S(Pk(s, d)).
Proof (by contradiction): If C(Pk+1(s, d)) does not contain any subset that is a
C(Pk(s, d)), the first k shortest paths then cannot be covered by C(Pk+1(s, d)) and
therefore C(Pk+1(s, d)) is not even a valid container cover, which is a contradiction to the
definition of C(Pk+1(s, d)). 2
This lemma implies that all C(Pk+1(s, d)) can be developed by expanding
C(Pk(s, d)) in S(Pk(s, d)).
Lemma 6.2. The cardinality of any minimal container cover C(Pk+1(s, d)) is at most
greater than the cardinality of its contained minimal container cover C(Pk(s, d)) by 1.
Proof (by contradiction): Assume that the cardinality difference is greater
than 1, which means that there are more than 1 link in C(Pk+1(s, d)) that are not
included in C(Pk(s, d)). Since all first k shortest paths are already covered by the
links in C(Pk(s, d)) and at most one extra link is needed to cover the (k + 1)th path,
C(Pk+1(s, d)) will not be a minimal cover , which contradicts its definition. 2
Lemma 6.3. Any minimal container cover C(Pk+1(s, d)) can only contain one
C(Pk(s, d)).
120

Proof: If C(Pk+1(s, d)) is the same as C(Pk(s, d)), the proof becomes trivial.
If C(Pk+1(s, d)) is not the same as C(Pk(s, d)), according to lemma 6.2, C(Pk(s, d))
can be different from C(Pk+1(s, d)) that contains it by at most one link. Assume that
there are more than one C(Pk(s, d)) contained in C(Pk+1(s, d)) and we name two
of them C1(Pk(s, d)) and C2(Pk(s, d)). Then the cardinality of C1(Pk(s, d)) and
C2(Pk(s, d)) must be |C(Pk+1(s, d))| − 1. Moreover, since neither C1(Pk(s, d))
nor C2(Pk(s, d)) can contain a link covering the (k + 1)th shortest path (otherwise
C(Pk+1(s, d)) is not a minimal container cover ), there is no way to develop C(Pk+1(s, d))
from C1(Pk(s, d)) or C2(Pk(s, d)) by adding only one link unless C1(Pk(s, d)) is the same
as C2(Pk(s, d)). 2
In light of lemmas 6.1, 6.2, and 6.3, we have a formal mechanism to derive the
complete minimal container cover set via container cover expansion, as stated in
theorem 2.
Theorem 6.2. (Container Cover Expansion) Given S(Pk(s, d)), S(Pk+1(s, d))
can be developed from all C(Pk(s, d)) of S(Pk(s, d)) as follows: keep a C(Pk(s, d)) in
S(Pk+1(s, d)) if it can cover the (k + 1)th shortest path or expand a C(Pk(s, d)) that
cannot cover the (k + 1)th shortest path by trying to include one link on the (k + 1)th
shortest path. According to whether the link belongs to the complete covering link set
L(Pk(s, d)), there are two cases:
1. If the link does not belong to L(Pk(s, d)), include it into C(Pk(s, d)) forming a
C(Pk+1(s, d)).
2. If the link does belong to L(Pk(s, d)), include it to form a C(Pk+1(s, d)) if the
resulting container cover is minimal.
Proof: According to lemmas 6.1 and 6.2, all C(Pk+1(s, d)) can be developed from
C(Pk(s, d)) by adding at most one link. According to lemmas 6.2 and 6.3, no two distinct
C(Pk(s, d)) can be expanded to the same C(Pk+1(s, d)), which means there will be no
redundant expansion in developing S(Pk+1(s, d)).
121

With respect to the expansion from a C(Pk(s, d)) to a C(Pk+1(s, d)), since adding
any link that is not on the (k + 1)th path will not help form a C(Pk+1(s, d)), checking
through the links on the (k + 1)th path is enough to find all possible C(Pk+1(s, d))
expanded from a specific C(Pk(s, d)).
If the added link on the (k + 1)th shortest path does not belong to L(Pk(s, d)),
then it cannot cover any path in Pk(s, d). Taking out any link from C(Pk(s, d)) will leave
Pk(s, d) not fully covered. Therefore the expanded link set by including such a link is a
valid C(Pk+1(s, d)).
If the added link on the (k + 1)th shortest path does belong to L(Pk(s, d)), it
may cover some path(s) in Pk(s, d). Taking out some link from C(Pk(s, d)) may leave
Pk(s, d) still fully covered. If not, the expanded link set is a valid C(Pk+1(s, d)). 2
Theorem 6.2 actually describes a formal way to build up S(Pk+1(s, d)) from
S(Pk(s, d)) through independent expansions on each C(Pk(s, d)) in S(Pk(s, d)).
Theorem 6.3. If the (k + 1)th shortest path has a unique cost in the ordered path
spectrum (a sequence of all possible paths), the minimal container cover expansions
from S(Pk(s, d)) to S(Pk+1(s, d)) only happen on C(Pk(s, d)) that leads to generation
of the (k + 1)th shortest path by removing all the links in C(Pk(s, d)) from the original
network G(N,L).
Proof (by contradiction): Assume an expansion happens on a C(Pk(s, d)) that
does not lead to generation of the (k + 1)th shortest path but another path p. According
to the process of ordered path enumeration and the cost uniqueness of the (k + 1)th
shortest path, path p must have a higher cost than the (k + 1)th shortest path. Since
by assumption the C(Pk(s, d)) does not cover the (k + 1)th shortest path (because it
is expanded to cover the (k + 1)th shortest path), path p cannot be the shortest path
induced by C(Pk(s, d)), which contradicts path p’s definition. 2
Theorem 6.3 provides insight in the scope of minimal container cover expansions
after a new path is enumerated.
122

Theorem 6.4. All the C(Pk(s, d)) that lead to generation of a shortest path with
a cost greater than the cost of the (k + 1)th shortest path will not be expanded when
developing S(Pk+1(s, d)).
Proof (by contradiction): Assume such a C(Pk(s, d)) gets expanded when
developing S(Pk+1(s, d)), which means the C(Pk(s, d)) cannot cover the (k + 1)th
shortest path. Since the shortest path generated by removing all the links in C(Pk(s, d))
has a greater cost than the (k + 1)th shortest path has, that path is not a valid shortest
path associated with C(Pk(s, d)). That is a contradiction. 2
Theorem 6.4 states that expansions, at each round of path enumeration, are well
bounded and hence wasted expansions are thereby avoided.
6.3.3 The Ordered Path Enumeration Algorithm
Based on the derivation of above theorems and lemmas, we formulate the ordered
path enumeration algorithm in Figure 6-1 1 2 , which enumerates K shortest paths
connecting s and d in network G(N,L). Theorem 6.4 can be applied in line 9 of the
algorithm to ease the condition check because C(Pk(s, d)) must cover pk+1 if the
shortest path cost of the network G(N,L\C(Pk(s, d))) is higher than the cost of pk+1.
6.3.4 Container Cover Minimality Detection
As indicated in line 24 in Figure 6-1, decision on minimality of the expanded
container cover C(Pk(s, d)) ∪ l is a necessary step to guarantee the minimality of and
to control the growth of the complete container cover set S(Pk+1(s, d)).
A naive way to examine the minimality of the expanded container cover
C(Pk(s, d)) ∪ l is by definition to check if any of its subsets formed by removing
one link in C(Pk(s, d)) can still cover all the paths in Pk(s, d) (there is no need to check
1 The set operator ”\” in line 11 refers to the relative complement, i.e., L\C(Pk(s, d)) , l | l ∈ L, l /∈C(Pk(s, d)).
2 The function call “shortest path( )” in line 11 can be saved by storing the shortest path and its cost innetwork G(N,L\C(Pk(s, d))) the first time when C(Pk(s, d)) is formed.
123

Algorithm: Ordered Path EnumerationInput: G(N,L), s , d , K //network, source, destination, required number of pathsOutput: paths[K ] // orderly enumerated paths
1. procedure Ordered Path Enumeration2. P0(s, d)← Ω, C(P0(s, d))← Ω3. L(P0(s, d))← Ω, S(P0(s, d))← C(P0(s, d))4. (paths[1], paths cost[1])← shortest path(G(N,L), s, d)5. k ← 06. while (k < K)7. S(Pk+1(s, d))← Ω, next cost ←∞8. for each C(Pk(s, d)) in S(Pk(s, d))9. if C(Pk(s, d)) covers paths[k + 1]
10. S(Pk+1(s, d))← S(Pk+1(s, d)) ∪ C(Pk(s, d))11. (path, cost)← shortest path(G(N,L\C(Pk(s, d))), s, d)12. if next cost > cost13. next cost ← cost, next path ← path14. end if15. else16. for each link l on paths[k + 1]17. if l /∈ L(Pk(s, d))18. S(Pk+1(s, d))← S(Pk+1(s, d)) ∪ C(Pk(s, d)) ∪ l19. (path, cost)← shortest path(G(N,L\l\C(Pk(s, d))), s, d)20. if next cost > cost21. next cost ← cost, next path ← path22. end if23. else24. if C(Pk(s, d)) ∪ l is a minimal container cover25. S(Pk+1(s, d))← S(Pk+1(s, d)) ∪ C(Pk(s, d)) ∪ l26. (path, cost)← shortest path(G(N,L\l\C(Pk(s, d))), s, d)27. if next cost > cost28. next cost ← cost, next path ← path29. end if30. end if31. end if32. end for33. end if34. end for35. L(Pk+1(s, d))← L(Pk(s, d)) ∪ l |l ∈ paths[k + 1]36. k ← k + 137. paths[k + 1]← next path38. end while39. end procedure
Figure 6-1. Pseudo code of the ordered path enumeration algorithm
124

the coverage of the (k + 1)th shortest path because it is covered by link l). When there
is such a subset found that is able to cover all the paths in Pk(s, d), we decide that
C(Pk(s, d))∪l is not minimal. Instead of checking coverage of all the paths in Pk(s, d),
a smarter way is to only check if link l can cover the paths that are uniquely covered by
the removed link (but not by any other link in C(Pk(s, d))). This unique coverage relation
needs to be maintained through the container cover expansion process, which is not a
complex operation and is not described in detail in the interest of space. There also exist
heuristic opportunities and the detailed discussion is skipped as well.
6.3.5 Potential Algorithmic Advantages
As we show in algorithm description, the minimal container cover expansion based
path enumeration features bounded expansions. Besides, each time the shortest path
call operates on a network different from its last call (before container cover expansion)
only by one link absence (such difference however is huge in Lawler’s method). Hence,
incremental implementation of the shortest path call is potentially possible.
6.4 Application I: Wavelength Utilization Minimization for RWA with Shared-PathProtection
As mentioned at the beginning of this chapter, one of the reasons for which
k-shortest disjoint routing may not perform well is that the network is less-densely
connected and hence not many disjoint paths can be developed. For example, in
the NSF network as shown in Figure 6-2, the average number of link-disjoint paths
developed by the k-shortest disjoint routing algorithm over all possible node pairs
is 2.32. However, for the RWA problem with shared-path protection, as studied in
[21, 36–38, 41, 57] and described afterwards, there should be two link-disjoint paths for
each flow request (one for the working lightpath and the other for the spare lightpath).
Hence, the pool of candidate routes given by k-shortest link-disjoint routing may not
provide enough routing choices for solving the problem to good optimality.
125

Figure 6-2. NSF network
6.4.1 Problem Description
Given a network G(N,L) and a group of flow requests, the problem is to find and
assign continuous wavelengths to a pair of working and spare lightpaths for each flow
request with a set of design rules. The objective of the solution is to minimize the total
wavelengths used throughout the network. The design rules are described as follows:
1. The working path and its spare path for any flow request must be link-disjoint;
2. No wavelength on any link can be shared neither between two working paths nor
between a working path and a spare path;
3. No two spare paths can share the same wavelength on any link if their working
paths join each other anywhere in the network.
Shared-path protection can effectively help lower the resource requirement for the
protective paths and it guarantees that the network can survive over one arbitrary link
failure.
6.4.2 Candidate Routing
Since the lack of routing choices caused by applying k-shortest disjoint routing
to a less-densely connected network potentially degrades the optimality in solving
the problem, more routing options need to be explored with the following three
considerations: (1) the candidate routes are expected to have short length for resource
saving; (2) the disjointedness relation among the candidate routes for a flow request
should be high enough for broader choices on selecting disjoint working/spare path pairs
126

among them; (3) the number of candidate routes needs to be moderately controlled in
order for the problem complexity to stay comparable to the k-shortest disjoint routing
based method.
We treat the paths in PK(s, d) developed by the proposed path enumeration
algorithm as vertices, and there is an undirected edge between two vertices if the two
paths that the two vertices represent are link-disjoint. We then call such graph path −
disjointedness graph, denoted by G(PK(s, d)). In addition, we sort all the vertices based
on their corresponding path costs. According to the three considerations described
above, our goal is to find a subgraph (containing a controlled number of vertices) in
G(PK(s, d)) that is as dense as possible and meanwhile contains vertices with costs as
low as possible.
With respect to the latest studies on dense subgraphs [4, 5, 17, 28], although
finding a subgraph of maximum density 3 without size constraints on it is shown to be a
polynomial-time problem [28], solving the size-constrained densest subgraph problem
remains NP-hard [5, 17]. In addition, those studies do not consider vertex costs in
selecting subgraphs. We propose a simple heuristic scheme to balance the density
and the cost considerations at the same time, which searches for a subgraph with a
pre-described number of vertices in G(PK(s, d)).
The idea is to start the search from the lowest-cost vertex. From there each time
we try to find a path that is of the lowest cost among all the unselected paths that are
link-disjoint with the path selected at the last round. If there is no such path available,
then the search backtracks returning to the most recent vertex along the search tree and
starts again. The merit of this method is that the search is always trying to find low-cost
paths and at the same time keeps a certain level of path disjointedness. Figure 6-3
3 The density of a subgraph on vertex set S is defined as d(S) , |E(S)|/|S | , where E(S) is the set ofedges in the subgraph induced by vertices in S .
127

shows the pseudo code of the candidate routing scheme, from which we can see the
algorithm is indeed a depth-first-search (DFS) traversal over a pre-described number of
vertices in a vertex-cost-sorted graph.
Algorithm: Candidate Routes SearchInput: PK(s, d), G(PK(s, d)), M // p1, ..., pK are sorted by costOutput: RM(s, d) // candidate route set of cardinality M
1. procedure Candidate Routes Search2. RM(s, d)← p13. set all elements of last visit[K ] to UNVISITED4. i ← 2, last visit[1]← DEADEND5. while(i ≤ M) // search for i th candidate path6. j ← index of the latest included path in RM(s, d)7. found ← NO8. while (j = DEADEND)9. for (k from 1 to K )
10. if ((pj , pk are link-disjoint) and (last visit[k ] ==UNVISITED))11. RM(s, d)← RM(s, d) ∪ pk // found a new path12. found ← YES, last visit[k ]← j // record the search tree13. break14. end if15. end for16. if (found == YES)17. break18. else19. j ← last visit[j ] // backtrack20. end if21. end while22. i ← i + 123. end while24. end procedure
Figure 6-3. Pseudo code of the candidate routing scheme
6.4.3 Problem Formulations
We provide three integer linear programming (ILP) formulations for the
shared-path-protection-based RWA problem. The first one provides an original
formulation that leaves the choices on routing and wavelength assignment fully open.
The second one limits the routing options to the paths developed by the k-shortest
128

link-disjoint routing algorithm. The third one applies candidate routing, as described
above, to create routing options.
6.4.3.1 Notations Used in Three Formulations
Constants:.
• N: Number of nodes in network G(N,L)
• L: Number of directed links in network G(N,L)
• F : Number of flow requests
• W : Number of provided wavelengths on each link
• Rf : Number of candidate routes provided to flow f , which depends on the routingscheme used
Indices:.
• i : Node index taking integers from 0 to N − 1
• l : Unidirectional link index taking integers from 0 to L− 1
• f : Flow index taking integers from 0 to F − 1
• r : Route index taking integer from 0 to Rf − 1
• w : Wavelength index taking integers from 0 toW − 1
Sets:.
• Rl : Set of all candidate routes of all flows passing through the unidirectional link l
• Lini : Set of unidirectional links terminating at node i
• Louti : Set of unidirectional links starting from node i
• C fr : Set of conflicting routes in flow f ’s candidate routing set that are notlink-disjoint with route r of flow f
Decision variables (integer):.
• x fwl , y fwl : Represent whether flow f routes its working and spare paths,respectively, through wavelength w on link l by taking on 1 or 0
129

• ufwr , v fwr : Represent whether the working and spare paths, respectively, of flow ftake route r through wavelength w by taking on 1 or 0
Auxiliary variables (integer):.
• λfw1 , λfw2 : Represent whether the working and spare paths of flow f , respectively,
take on wavelength w by taking on 1 or 0
• ewl : Represents whether wavelength w on link l is assigned (to either a working ora spare lightpath) by taking on 1 or 0
• Ew : Represents whether wavelength w is assigned anywhere in the network bytaking on 1 or 0
6.4.3.2 The Original Formulation
Model:.
min∑w
Ew (6–1)
subject to following constraints:
1. Working/spare path validity and wavelength continuity.
∑l1∈Lini
x fwl1 −∑l2∈Louti
x fwl2 =
−λfw1 , if s(f ) = i
+λfw1 , if d(f ) = i
0, O.W .
(6–2)
∑l1∈Lini
y fwl1 −∑l2∈Louti
y fwl2 =
−λfw1 , if s(f ) = i
+λfw1 , if d(f ) = i
0, O.W .
(6–3)
∑w
λfw1 = 1 (6–4)
∑w
λfw2 = 1 (6–5)
130

where s(f ) and d(f ) in (6–2) and (6–3) refer to the source and destination nodes of
flow f .
2. Working/spare path link disjointedness.
∑w
x fwl +∑w
y fwl ≤ 1 (6–6)
3. Conflict avoidance between paths.
a. Resource conflict avoidance on each wavelength link:
∑f
x fwl + yfwl ≤ 1 (6–7)
b. Spare/spare resource conflict avoidance on the same wavelength link:∑w
x f1wl1 +∑w
x f2wl1 + yf1wl2+ y f2wl2 ≤ 3
f1 = f2 and l1 = l2
(6–8)
Equation (6–7) indicates that, on any wavelength link, either only one working path
or multiple spare paths are allowed to be established, which enforces design rule 2
described in Section 6.4.1. Equation (6–8) makes design rule 3 hold in which two spare
paths cannot take the same wavelength link (then y f1wl2 + yf2wl2= 2) if the corresponding
two working paths join each other (then∑w xf1wl1+∑w xf2wl1= 2).
4. Wavelength link occupation accounting.
x fwl ≤ ewl (6–9)
y fwl ≤ ewl (6–10)
ewl ≤ Ew (6–11)
131

6.4.3.3 k-Shortest Disjoint Routing Based Formulation
Model:.
min∑w
Ew (6–12)
subject to following constraints:
1. Path validity and wavelength continuity (automatically satisfied since all
paths developed by k-shortest disjoint routing are valid paths).
2. Working/spare path link disjointedness.
∑w
ufwr +∑w
v fwr ≤ 1 (6–13)
∑r
∑w
ufwr = 1 (6–14)
∑r
∑w
v fwr = 1 (6–15)
3. Conflict avoidance between paths.
a. Resource conflict avoidance on each wavelength link:
∑(f ,r)∈Rl
ufwr + vfwr ≤ 1, for (f , r) ∈ Rl (6–16)
b. Spare/spare resource conflict avoidance on the same wavelength link:∑w
uf1wr1 +∑w
uf2wr2 + vf1wr3+ v f2wr4 ≤ 3,
f1 = f2, r1 = r3, and r2 = r4,
(f1, r1) ∈ Rl1, (f2, r2) ∈ Rl1, (f1, r3) ∈ Rl2,and (f2, r4) ∈ Rl2,
l1 = l2.
(6–17)
132

4. Wavelength link occupation accounting.
ufwr ≤ ewl , for (f , r) ∈ Rl (6–18)
v fwr ≤ ewl , for (f , r) ∈ Rl (6–19)
ewl ≤ Ew (6–20)
It should be noticed that, in above formulation, route index r ranges over all possible
routes developed by k-shortest disjoint routing, and it can vary from flow to flow because
of different local connectivity among node pairs in the network.
6.4.3.4 Candidate Routing Based Formulation
The candidate routing based formulation is essentially very similar to the k-shortest
disjoint routing based formulation except that the range of the route index r now
depends on the candidate routing set, and the disjointedness constraint formulated
in (6–13) is replaced by
∑w
ufwr +∑w
v fwr +∑
(f ,r)∈C fr
∑w
v fwr ≤ 1. (6–21)
The additional term∑(f ,r)∈C fr
∑w v
fwr added to the constraint expression is to avoid
selecting the working and spare paths that are not link-disjoint, which is not needed in
the k-shortest disjoint routing based formulation because all routes developed there are
link-disjoint.
6.4.3.5 Formulation Comparison
We compare above three formulations on the NSF network in the following aspects:
problem size, route processing time, and average candidate route disjointedness. For the
k-shortest disjoint routing based formulation, all the link-disjoint routes developed for
133

each flow are included for routing options. For the candidate routing based formulation,
the candidate routing sets of sizes 3 and 4, respectively, are considered for each flow.
Table 6-1. Problem size comparison among formulations: number of variablesNumber of flow requests 10 20 30 40 50
Original formulation 8190 15990 23790 31590 39390k-shortest disjoint routing based 850 1330 1790 2250 27103-candidate routing based 990 1590 2190 2790 33904-candidate routing based 1190 1990 2790 3590 4390
Table 6-2. Problem size comparison among formulations: number of constraintsNumber of flow requests 10 20 30 40 50
Original formulation 1280380 5372380 12276380 21992380 34520380k-shortest disjoint routing 3003 8017 14420 23703 349063-candidate routing based 4690 13180 25030 41310 584904-candidate routing based 9720 35040 70840 123020 185990
Table 6-3. Route processing time comparison (in second, running on a Windowsmachine with a 3GHz processor)
Number of flow requests 10 20 30 40 50
Original formulation 0 (no route search required)k-shortest disjoint routing based < 0.001 < 0.001 < 0.001 < 0.001 < 0.0013-candidate routing based 0.016 0.047 0.078 0.094 0.1254-candidate routing based 0.016 0.047 0.078 0.094 0.125
The problem size comparison is characterized in Tables 6-1 and 6-2, which record
the numbers of variables and constraints generated for different problem formulations
when 10 wavelengths are available on each link. As we can observe, the original
formulation leads to a huge problem size even for a small problem, which indeed
prohibits modern ILP solvers 4 from obtaining a valid solution. However, the sizes of
those candidate path based formulations are moderately controlled.
The route processing time is compared in Table 6-3, which is defined as the time
spent on generating routes for different formulations. For the candidate routing based
4 Modern ILP solvers can, depending on the problem structure, solve a problem with up to a few tensof thousands variables/constraints in general.
134

Table 6-4. Average candidate route disjointedness comparison (averaged over flows)Number of flow requests 10 20 30 40 50
k-shortest disjoint routing based 1.60 1.70 1.67 1.65 1.643-candidate routing based 2.30 2.35 2.33 2.30 2.284-candidate routing based 3.90 4.00 3.97 3.98 3.90
formulation, this time includes enumerating all possible paths for each flow on the NSF
network and running the candidate routing algorithm (listed in Figure 6-3). It is observed
that, although the candidate routing based formulation requires higher route processing
time, the time cost is on average still very low.
Table 6-4 shows the potential benefit of applying candidate routing by comparing
average candidate route disjointedness, which is defined as the average number of
link-disjoint path pairs in a candidate routing (or k-shortest disjoint routing) set over all
flow requests. This quantity indicates the flexibility in choosing a work/spare path pair
when solving the RWA problem. As observed from Table 6-4, candidate routing leads
to much higher flexibility in working/spare paths selection, which can be leveraged for
better solution optimality.
6.4.4 Numerical Results
We test the above ILP formulations and evaluate their performance by sending them
to an ILP solver MOSEK, a large-scale mixed-integer linear program solver applying a
combination of the interior point, branch and cut technologies [1]. Figures 6-4 and 6-5
shows the best results after running MOSEK on different formulations for 8 hours. We
can clearly observe the performance advantage of candidate routing over k-shortest
disjoint routing when the number of flow requests and the size of the candidate routing
set increase. On average, the performance improvement reaches 8.25% and 14.68%,
respectively, for 3-candidate routing and 4-candidate routing over the problem instances
with flow numbers from 20 to 50.
135

Figure 6-4. Solution optimality comparison between k-shortest disjoint routing and3-candidate routing after running MOSEK for 8 hours
Figure 6-5. Solution optimality comparison between k-shortest disjoint routing and4-candidate routing after running MOSEK for 8 hours
6.5 Application II: Topological Optimization for Shared-Path Protection RWA
Another reason for potential unsatisfactory performance of k-shortest disjoint
routing is that the routing set developed may not best fit the problem nature as we
discuss in this section.
6.5.1 Problem Description
The problem is similar to the problem discussed in the last section in the sense that
all the flow requests have to be addressed by allocating working/spare path pairs and
all the design rules described in Section 6.4.1 must hold. The difference in topological
optimization is that there is no fixed topology and the objective is to find the least-cost
136

topology that can accommodate all the flow requests. The topological cost is defined
as the sum of the costs of all bidirectional links that are allocated to flow requests. The
solution to this problem can be potentially used as a topological choice of initial network
deployment, or it can also be used for generating a new logic topology to adapt the
traffic over a new physical network condition, as we discuss in the last chapter.
6.5.2 Candidate Routing
The nature of the problem indicates, in order to use less link resources
(corresponding to having a lower-cost topology), the wavelengths on each assigned
link should be as fully utilized as possible and therefore the link resources can be
efficiently shared among the flows. Such indication implies that the candidate routes of
flows are expected to have high potential to overlap. However, the k-shortest disjoint
routing algorithm develops routing sets for each flow independently and no overlap
potential among the routing sets is considered.
We first define bidirectional link potential ρb as
ρb ,F∑f=1
Kf∑k=1
I fkb , (6–22)
where I fkb indicates whether the k th enumerated path of flow f passes through
bidirectional link b by taking on 1 or 0, F is the number of flow requests, and Kf is
the number of enumerated paths for flow f . Hence, ρb becomes a frequency counter
indicating the overlap potential of all possible paths on link b.
We then define path potential ρfk for enumerated paths as
ρfk , (∑b∈pfk
ρb · cb)/(∑b∈pfk
cb), (6–23)
where cb is the cost of bidirectional link b and pfk is the k th enumerated path (a set
of bidirectional links) of flow f . ρfk essentially can be treated as a score, averaged over
the links that path pfk passes through, indicating the path’s overlap potential with other
paths.
137

The candidate routing for the topological optimization problem takes similar
considerations as for the problem discussed in the last section except that, instead
of choosing short-length paths, the selected candidate routes are expected to have
high path potentials. Then the candidate routing selection scheme described in Figure
6-3 can still apply to the topological optimization problem with the only change that
the vertices in the path − disjointedness graph G(PK(s, d)) are sorted based on their
corresponding path potentials.
6.5.3 Problem Formulations
The three types of formulations corresponding to the ones in the last section are
shown after introducing several new notations.
6.5.3.1 Notations
Only the notations that uniquely apply to the topological optimization problem are
listed. The rest of notations can be referred to in the last section.
Indices:.
• l : Unidirectional link index ranging from 0 to N(N − 1)− 1
• b: Bidirectional link index ranging from 0 to N(N − 1)/2− 1
Sets:.
• Rb: Set of all candidate routes of all flows passing through bidirectional link b
Data:.
• cb: Cost of bidirectional link b
Auxiliary variables (integer):.
• zb: Indicates whether bidirectional link b is allocated by taking on 1 or 0
6.5.3.2 The Original Formulation
Model:.
min∑b
cb · zb (6–24)
138

subject to the following constraints 1-4:
Constraints 1, 2, and 3 are the same as those listed for the original formula-
tion in the last section. Constraint 4 is as follows.
4. Bidirectional link utilization accounting.
x fwl ≤ zb, b = ⌊l/2⌋ (6–25)
y fwl ≤ zb, b = ⌊l/2⌋ (6–26)
6.5.3.3 k-Shortest Disjoint Routing Based Formulation
Model:.
min∑b
cb · zb (6–27)
subject to the following constraints 1-4:
Constraints 1, 2, and 3 are the same as those listed for the k-shortest disjoint
routing based formulation in the last section. Constraint 4 is as follows.
4. Bidirectional link utilization accounting.
ufwr ≤ zb, for (f , r) ∈ Rb (6–28)
v fwr ≤ zb, for (f , r) ∈ Rb (6–29)
It should be noticed that there is no harsh limit on the cardinality of k-shortest
disjoint routing sets because the topology now is open for the problem discussed in this
section.
6.5.3.4 Candidate Routing Based Formulation
The candidate routing based formulation for the topological optimization problem
is very similar to the above k-shortest disjoint routing based formulation with the same
exception as described in the corresponding place of Section 6.4.3.4.
139

6.5.3.5 Formulation Comparison
Since the hard limit on the cardinality of k-shortest disjoint routing sets is removed,
we can apply the same number of candidate routes to both the k-shortest disjoint
routing based and the candidate routing based formulations. Therefore, the resulting
problem size is very close for the above two formulations while the problem size of
the original formulation is still overwhelming for any modern ILP solver. The route
processing time for all the candidate routing based ILP instances that take the first 100
enumerated paths into candidate routing selection is below 5 seconds on a network
described in the next subsection. In the interest of space, those comparison details are
not listed.
6.5.4 Numerical Results
The performance of the ILP formulations is shown in Figures 6-6 and 6-7, where the
best topological costs for the various traffic loads among 16 US major cities (as shown
in Figure 5-11) are illustrated. There are 10 wavelengths available on each link and the
link cost is assumed proportional to the distance between cities. We can observe that
(1) increase of the number of candidate routes helps achieving better optimality (as we
compare Figures 6-6 and 6-7), and (2) the candidate routing based formulation brings
down the topological cost induced by the k-shortest disjoint routing based formulation,
on average, by 14.14% and 14.92% for the 4-candidate routing and 5-candidate routing
respectively.
Although the apparent benefit of k-shortest disjoint routing (algorithmic easiness
and low link utilization) traditionally makes it an easy option for developing candidate
routes, the lack of awareness of the specific problems’ nature may lead the solutions
to deviate from their global optimality. Hence, in-depth exploration of possible routing
choices for the best fit to the problem is needed. In this chapter, we first formally
propose a new container-cover-expansion-based path enumeration algorithm and
then develop a candidate routing scheme with special consideration on the problem
140

Figure 6-6. Solution performance comparison between k-shortest disjoint routing and4-candidate routing after running MOSEK for 8 hours
Figure 6-7. Solution performance comparison between k-shortest disjoint routing and5-candidate routing after running MOSEK for 8 hours
nature. The numerical results show that a great performance benefit can be obtained by
applying such methods to two shared-path-protection-based RWA problems.
141

CHAPTER 7CONCLUSIONS AND FUTURE WORK
7.1 Conclusions
This dissertation carries out an in-depth study on fault-tolerant all-optical
communication networks involving many aspects of the resource-allocation-related
problems, which include routing, wavelength assignment, and topology optimization.
We start with a fault-tolerant routing and wavelength assignment problem under the
N × N torus structure, in which we propose an optimal non-overlapping lightpath setup
algorithm (FOLD) to establish 4 link-disjoint lightpaths for all source-destination pairs.
The development of an efficient wavelength assignment and reuse (WAR) scheme
follows which efficaciously fits lightpaths together into a low number of wavelengths. The
efficiency of the scheme is verified by showing a very small performance gap between
the scheme and the lower bound solution in which wavelength conversion is applied.
In the end, we validate the proposed fault-tolerance-enhanced torus architecture
with respect to the connection reliability and under-failure throughput degradation via
extensive simulation results. The observation from the numerical comparisons states
that, via applying the proposed fault-tolerant architecture,
• the network can tolerate up to 3 arbitrary critical link failures without loss of anyconnection,
• the connection reliability is improved by an order of more than 104 under theregular failure probability (≪ 102) in the 4× 4 torus,
• and the average network throughput can sustain over a much larger number offailures without evident degradation than the regular network architecture withoutfault-tolerance design enabled.
In order to reduce the wavelength utilization while keeping the fault-tolerance
feature, varied spare sharing schemes are developed and applied to the torus-based
architecture. The tradeoff between the capacity of fault tolerance and resource utilization
is demonstrated via a Monte Carlo sampling based simulation over a 4× 4 torus.
142

The other examined classic topology for fault-tolerance study is the circulant
graphs, in which any number of communication nodes and arbitrary connectivity can be
supported. In light of Menger’s theorem, we develop a node-disjoint routing algorithm
for all source-destination pairs in the circulant graphs of the form CN(1, ...,W ), in
which all the routes are analytically calculated with respect to the node indices. We
also provide a thorough resource utilization analysis and derive a probabilistic model
to capture both node and link failures’ effect to the connection reliability. A numerical
analysis based on a 16-node circulant graph shows:
• the link resource utilization does not vary much over different source-destinationpair locations for the same degree of network connectivity,
• and the connection reliability increase almost linearly in the logarithmic scale withthe increase of the degree of network connectivity, showing the vast fault tolerancepotential of the circulant graphs.
Besides developing fault-tolerant routing and wavelength assignment algorithm
based on the classic topologies, the study is also given to the problem that targets
to construct or define, upon disaster occurring certain part of existing network
infrastructure, a new fault-tolerant topology with the lowest cost. We name this
type of problems as the topological optimization or adaptation problems, which are
anticipated to be computationally NP-hard. The problem is formulated into two forms
of ILPs with different characterizing granularity. We show the lack of optimality of the
traditional solving method in which routing and wavelength assignment are treated as
two independent subproblems by comparing with a greedy approach. Finally, based
on the study of the problem nature, we propose a two-phase heuristics for the problem
and the numerical results show a vast topological cost improvement from the greedy
approach.
7.2 Future Work
Along the process of the fault-tolerance study with findings on many
resource-allocation-related problems, this dissertation is aware that there still exist
143

many facets of research worthy of further investigation and the focuses of the next-stage
effort may flow into following directions:
• In the torus-based non-overlapping lightpaths setup algorithm, the controllerdisjointedness is not explicitly emphasized although only Cases III and IVcan cause lightpaths to join at two controllers. In the future, either a clearanalytical analysis on the fault-tolerance performance difference betweenthe proposed FOLD and a controller-disjointedness-enforced design or acontroller-disjointedness-oriented RWA optimization could be studied.
• In the probabilistic study of the torus-based fault-tolerant architecture, a uniformlydistributed traffic pattern and failure pattern across the torus are assumed.However, the traffic pattern may not be distributed in this way and may even varywith time. The failure probability distribution may depend on the specific structuralor operational vulnerability of the avionic systems on the aircrafts. Hence, atraffic-pattern-aware or failure-distribution-aware routing and resource allocationadaptation study may need further study in order for the torus architecture to beexamined in more practical aspects.
• In the fault-tolerant routing study on the circulant graphs, we assume that theoffset A is restricted to take a set of continuous integers 1, ...,W . However,this restriction may not lead the proposed routing algorithm to optimality in linkresource utilization or connection reliability. Future study may be dedicated tooptimizing the integer offset A in CN(A) with the goal of maximizing connectionreliability or minimizing resource utilization by relaxing the elements of A to take onany integers in [1, ⌊N/2⌋].
• In the topological optimization problem, we anticipate its complexity to be NP-hardvia being aware that many of its subproblems are NP-complete. However, that isnot a rigorous statement without a strict proof. Proper well-known NP-completeproblems need to be identified for the topological optimization problem to bereducible to and then the NP-hard statement about the topological optimizationproblem can strictly hold.
• We provide a preliminary analysis on the approximation of the greedy approach tothe topological optimization problem. However, the analysis works only on workingpaths allocation and the resulting ratio is not tight enough to show the performanceof the greedy approach. There may still exist space of analysis to further tightenthe ratio and we expect to include both working and backup paths allocation intothe analysis.
• We formally propose a new ordered-path-enumeration algorithm. However, acomprehensive analysis on its algorithm efficiency is not fully conducted. Inthe future, we plan (1) to analyze the algorithm complexity by comparing it indetail with the well-known path enumeration methods such as Yen’s and Lawler’s
144

algorithms, and (2) to utilize the path enumeration to identify potential multipleoptimal k-shortest disjoint routing solutions that the current k-shortest disjointrouting algorithm cannot.
145

APPENDIX AOPTIMALITY PROOF OF THE PROPOSED NON-OVERLAPPING LIGHTPATHS
SETUP ALGORITHM (FOLD)
We base the optimality proof of the proposed non-overlapping lightpaths setup
algorithm (FOLD) on the k-shortest link-disjoint paths algorithm [10] [54] [22]. Here k is
equal to 4 with respect to FOLD.
In general, the greedy algorithm described in Figure 2-2 does not necessarily lead
to an optimal solution, as shown in Figure A-1. A pair of link-disjoint paths (in orange
and blue) generated via the greedy algorithm takes 3 + 6 = 9 links (as shown in Figure
A-1(A)), which is greater than the number of links that the optimal solution (as shown in
Figure A-1(B)) takes. A
S D
B C
E F G
H I J K L
A Greedy solution
A
S D
B C
D E F
H I J K L
B Optimal solution
Figure A-1. Non-optimality demonstration for a greedy disjoint routing solution
The optimal k-shortest link-disjoint paths algorithm is based on path augmentation
and it guarantees reaching optimality via finding one of optimal solutions if there are
many. The algorithm finds optimal k shortest link-disjoint paths by augmenting optimal
k − 1 shortest link-disjoint paths. Take 2-shortest link-disjoint paths as an example, as
shown in Fig. 22, to illustrate how the algorithm works.
Step 1: Find the shortest path P1 from the source to the destination, as shown in
Figure A-2(A);
Step 2: Replace P1 with −P1 (reverse the link direction and change the link weight
from +1 to −1), as shown in Figure A-2(B);
Step 3: Find a shortest path P2 from the source to the destination in the modified
graph, as shown in Figure A-2(C);
146

A
S D
B C
E F G
H I J K L
A
A
S D
B C
E F G
H I J K L
-1 -1 -1
B A
S D
B C
E F G
H I J K L
-1 -1
-1
C
A
S D
B C
E F G
H I J K L
-1 +1
D
Figure A-2. Path augmentation based 2-shortest disjoint routing
Step 4: Take the union of P1 and P2, remove from the union the link set that consists
of the P1 links whose reversed links appear in P2, then group the remaining links into
two link-disjoint paths P ′1 and P ′
2, which are an optimal 2-shortest link-disjoint paths, as
shown in Figure A-2(D).
We call the shortest path generated in Step 3 the augmenting path. Based on the
optimal 2-shortest link-disjoint solution just obtained, we can extend above procedures
to obtain an optimal 3-shortest link-disjoint solution by replacing P ′1 and P ′
2 with −P ′1
and −P ′2 and following similar steps to Steps 3 and 4. Then, any optimal k-shortest
link-disjoint paths can be obtained based on optimal (k − 1)-shortest link-disjoint paths.
From above description of the optimal k-shortest link-disjoint routing, we observe
that the greedy algorithm will perform the same as the optimal algorithm if the shortest
path generated in Step 3 does not overlap any paths in the optimal link-disjoint paths set
generated after the previous iteration.
Hence, if each greedy path developed in Section III can satisfy the above condition,
we can conclude that the proposed lightpaths setup algorithm (FOLD) can generate
optimal solutions for any S-D positional relation.
147

D
Figure A-3. “Progressive” and “regressive” links
To facilitate the proof of the above claim, we re-examine all the links in the torus
with respect to a destination (D), as shown in Figure A-3, in terms of their facilitation in
routing towards the destination. The links in orange indicate those links by taking which
the route gets close to the destination (we call them progressive links). The links in blue
indicate those links by taking which the route gets away from the destination (we call
them regressive links).
Regarding X-Y routing, since the first and second shortest paths are both the
shortest paths throughout the network, they are optimal 2-shortest disjoint paths. Then
we find optimal 3-shortest disjoint paths via augmenting the 2-shortest disjoint paths
by reversing the 2 paths and associating each reversed link with weight −1. It can be
observed that all reversed links on the 2 paths are regressive links for all cases (I, II,
III and IV) of S-D positional relationship. Although by taking any of those links a route
can gain −1 weight benefit, at least one ”turn-back” hop has to be paid for the route to
reach the destination. Hence, taking those reversed links leads to no benefit in routing
a shortest path as in Step 3 during path augmentation. Therefore, the augmenting path
does not need to take on any links on the 2-shortest paths and the first 3 greedy paths
generated by FOLD are optimal. For the fourth greedy paths, the discussion has to be
148

based on cases. For Cases II, III and IV, it can be observed that all reversed links on
the third shortest path are regressive links but possibly the link incident to the source
is not. According to the loop-free property of the path augmentation algorithm [15],
the augmenting path will not retake any links including the link incident to the source.
Therefore, the augmenting path for generating 4-shortest paths does not need to take
on any links on the 3-shortest paths, and all the four greedy paths are optimal. For
Case I, it can be observed that all reversed links on the third shortest path are either
regressive or incident to the source except one horizontal link at the up right corner
of the third greedy path (as shown in Figure 2-4(A)). We label the tail controller as D3
and the head controller as S3 incident to that link. However, the benefit of taking this
link is overwhelmed by the cost of routing from the source to D3 followed by routing
from S3 to the destination after removal of links on three optimal shortest paths. Hence,
the augmenting path can also be routed independently of the three optimal paths.
Accordingly, the four greedy paths proposed for all X-Y routing cases (I, II, III and IV) are
optimal.
Regarding X routing and Y routing, since the paths setup of Y routing is exactly
mirrored from that of X routing, we only need to consider the optimality of X routing
paths setup. Since all reversed links of the first shortest path are regressive, the
augmenting path can be routed independently without taking any links of the first
shortest path. If the two mirroring paths are the second and third shortest paths, since
all the reversed links on them are regressive but the two links incident to the source,
for the same reason mentioned, the augmenting paths can be routed independently
when developing the 3- and 4-shortest link-disjoint paths. If the complementary path is
the second shortest path, it can be observed that all reversed links on it are regressive.
Then, the augmenting path can also be routed independently. Therefore, the four greedy
paths are optimal link-disjoint paths for both X and Y routing.
149

Combining the discussion on X-Y, X and Y routing, it can be concluded that the
proposed non-overlapping lightpaths setup reaches optimality.
150

APPENDIX BDERIVATION OF LS EXPRESSIONS
The calculations of LS are derived as follows.
• While 2 ≤ N ≤ 5, only routing cases II, II’ and II” appear in each destination group
– N is odd
LS =
N−12∑
dX=1
[N + 2(dX + 2)] +
N−12∑
dY=1
[N + 2(dY + 2)] + 2
N−12∑
dX=1
N−12∑
dY=1
2(N + dX + dY )
=1
2(3N3 − 2N2 + 7N − 8)
(B–1)
– N is even
LS =
N2−1∑
dX=1
[N + 2(dX + 2)] + [N + 2(N/2 + 2)]/2
+
N2−1∑
dY=1
[N + 2(dY + 2)] + [N + 2(N/2 + 2)]/2
+ 2
N2−1∑
dX=1
N2−1∑
dY=1
2(N + dX + dY ) +
N2−1∑
dX=1
2(N + dX + N/2)
+
N2−1∑
dY=1
2(N + dY + N/2) + (N + N/2 + N/2)
=1
2(3N3 − 2N2 + 8N − 8)
(B–2)
• While 6 ≤ N ≤ 9, cases I, III and IV are included additionally in the destinationgroup
151

– N is odd
LS =
N−12∑
dX=1
[N + 2(dX + 2)] +
N−12∑
dY=1
[N + 2(dY + 2)]
+ 2
N−52∑
dX=1
N−52∑
dY=1
4(dX + dY + 2) +
N−12∑
dX=N−32
N−52∑
dY=1
[N + 2(2dY + dX + 2)]
+
N−52∑
dX=1
N−12∑
dY=N−32
[N + 2(2dX + dY + 2)] +
N2−1∑
dX=N−32
N2−1∑
dY=N−32
2(N + dX + dY )
=1
2(2N3 + 9N2 − 28N + 17)
(B–3)
– N is even
LS =
N2−1∑
dX=1
[N + 2(dX + 2)] + [N + 2(N/2 + 2)]/2
+
N2−1∑
dY=1
[N + 2(dY + 2)] + [N + 2(N/2 + 2)]/2
+ 2
N2−2∑
dX=1
N2−2∑
dY=1
4(dX + dY + 2) +
N2−1∑
dX=N2−1
N2−2∑
dY=1
[N + 2(2dY + dX + 2)]
+
N2−2∑
dX=1
N2−1∑
dY=N2−1
[N + 2(2dX + dY + 2)] +
N2−1∑
dX=N2−1
N2−1∑
dY=N2−1
2(N + dX + dY )
+
N2−2∑
dY=1
[N + 2(2dY + N/2 + 2)] +
N2−2∑
dX=1
[N + 2(2dX + N/2 + 2)]
+ 2[N + N/2 + (N/2− 1)] + 2[N + (N/2− 1) + N/2] + (N + N/2 + N/2)
=1
2(2N3 + 9N2 − 26N + 16)
(B–4)
• While N ≥ 10, cases I’ and I” join in the destination group
152

– N is odd
LS =
N−92∑
dX=1
4(dX + 3) +
N−12∑
dX=N−72
[N + 2(dX + 2)]
+
N−92∑
dY=1
4(dY + 3) +
N−12∑
dY=N−72
[N + 2(dY + 2)]
+ 2
N−52∑
dX=1
N−52∑
dY=1
4(dX + dY + 2) +
N−12∑
dX=N−32
N−52∑
dY=1
[N + 2(2dY + dX + 2)]
+
N−52∑
dX=1
N−12∑
dY=N−32
[N + 2(2dX + dY + 2)] +
N2−1∑
dX=N−32
N2−1∑
dY=N−32
2(N + dX + dY )
= N3 + 4N2 − 5N − 32
(B–5)
– N is even
LS =
N2−4∑
dX=1
4(dX + 3) +
N2∑
dX=N2−3
[N + 2(dX + 2)]
+1
2[N + 2(N/2 + 2)] +
N2−4∑
dY=1
4(dY + 3)
+
N2∑
dY=N2−3
[N + 2(dY + 2)] +1
2[N + 2(N/2 + 2)]
+ 2
N2−2∑
dX=1
N2−2∑
dY=1
4(dX + dY + 2) +
N2−1∑
dX=N2−1
N2−2∑
dY=1
[N + 2(2dY + dX + 2)]
+
N2−2∑
dX=1
N2−1∑
dY=N2−1
[N + 2(2dX + dY + 2)] +
N2−1∑
dX=N2−1
N2−1∑
dY=N2−1
2(N + dX + dY )
+
N2−2∑
dY=1
[N + 2(2dY + N/2 + 2)] +
N2−2∑
dX=1
[N + 2(2dX + N/2 + 2)]
+ 2[N + N/2 + (N/2− 1)] + 2[N + (N/2− 1) + N/2] + (N + N/2 + N/2)= N3 + 4N2 − 4N − 32
(B–6)
153

REFERENCES
[1] [Online], 2010. The MOSEK website.
URL http://www.mosek.com
[2] [Online], 2010. The NEOS website.
URL http://neos.mcs.anl.gov
[3] Agarwal, Pankaj K., Efrat, Alon, Ganjugunte, Shashidhara K., Hay, David,Sankararaman, Swaminathan, and Zussman, Gil. “Network Vulnerability to Single,Multiple, and Probabilistic Physical Attacks.” Military Communications Conference,2010. MILCOM 2010. IEEE. 2010, 1947 –1952.
[4] Andersen, Reid. “A local algorithm for finding dense subgraphs.” ACM Trans.Algorithms 6 (2010): 60:1–60:12.
URL http://doi.acm.org/10.1145/1824777.1824780
[5] Asahiro, Yuichi, Hassin, Refael, and Iwama, Kazuo. “Complexity of finding densesubgraphs.” Discrete Applied Mathematics 121 (2002): 15–26.
[6] Bala, K., Chung, F.R.K., and Brackett, C.A. “Optical wavelength routing, translation,and packet/cell switched networks.” Lightwave Technology, Journal of 14 (1996).3:336 –343.
[7] Banerjee, D. and Mukherjee, B. “A practical approach for routing and wavelengthassignment in large wavelength-routed optical networks.” Selected Areas inCommunications, IEEE Journal on 14 (1996).5: 903 –908.
[8] Barry, R.A. and Humblet, P.A. “Models of blocking probability in all-optical networkswith and without wavelength changers.” Selected Areas in Communications, IEEEJournal on 14 (1996).5: 858 –867.
[9] Beauquier, B. “All-to-all communication for some wavelength-routed all-opticalnetworks.” Networks (1999).33.
[10] Bhandari, R. “Optimal diverse routing in telecommunication fiber networks.”INFOCOM ’94. Networking for Global Communications., 13th Proceedings IEEE.1994, 1498 –1508 vol.3.
[11] Bowers, J. “Low power 3D MEMS optical switches.” Optical MEMS and Nanopho-tonics, 2009 IEEE/LEOS International Conference on. 2009, 152 –153.
[12] Brander, A. W. and Sinclair, M. C. “A Comparative Study of k-Shortest PathAlgorithms.” In Proc. of 11th UK Performance Engineering Workshop. 1995,370–379.
154

[13] Chlamtac, I., Ganz, A., and Karmi, G. “Lightpath communications: an approachto high bandwidth optical WAN’s.” Communications, IEEE Transactions on 40(1992).7: 1171 –1182.
[14] Choi, Don, Taylor, D., and Seibel, R. “Priority-based optical network protectionand restoration with application to DOD networks.” Military CommunicationsConference, 2003. MILCOM 2003. IEEE. vol. 1. 2003, 298 – 303 Vol.1.
[15] Eppstein, David. “Finding the k Shortest Paths.” SIAM J. Comput. 28 (1999):652–673.
URL http://dx.doi.org/10.1137/S0097539795290477
[16] Farrag, A.A. “Algorithm for constructing fault-tolerant solutions of the circulant graphconfiguration.” Frontiers of Massively Parallel Computation, 1995. Proceedings.Frontiers ’95., Fifth Symposium on the. 1995, 514 –520.
[17] Feige, Uriel, Peleg, David, and Kortsarz, Guy. “The Dense k-Subgraph Problem.”Algorithmica 29 (2001): 410–421.
[18] Gardner, R.D., Andonovic, I., Hunter, D.K., McLaughlin, A.J., Aitchison, J.S., andMarsh, J.H. “High performance photonic avionics networking using WDM.” MilitaryCommunications Conference Proceedings, 1999. MILCOM 1999. IEEE. 1999.
[19] Gerstel, O. “On the future of wavelength routing networks.” Network, IEEE 10(1996).6: 14 –20.
[20] Group, IETF Internet Working. “Inference of Shared Risk Link Groups.” InternetDraft [Online], 2001.
URL http://tools.ietf.org/html/draft-many-inference-srlg-02
[21] Guo, Lei, Cao, Jin, Yu, Hongfang, and Li, Lemin. “Path-based routing provisioningwith mixed shared protection in WDM mesh networks.” Lightwave Technology,Journal of 24 (2006).3: 1129 –1141.
[22] Guo, Yuchun, Kuipers, O, and Mieghem, Piet Van. “Link-disjoint paths for reliableQoS routing.” Intl. Journal of Communication Systems (2003): 779–798.
[23] Habiby, S.F. and Hackert, M.J. “Ronia results: WDM-based optical networks inaircraft applications.” Avionics, Fiber-Optics and Photonics Technology Conference,2008 IEEE. 2008.
[24] Habiby, S.F. and Vaidyanathan, R. “WDM Optical Backbone Networks in aircraftapplications: Networking challenges and standards progress.” Military Communica-tions Conference, 2009. MILCOM 2009. IEEE. 2009, 1 –6.
155

[25] Hershberger, John, Maxel, Matthew, and Suri, Subhash. “Finding the k shortestsimple paths: A new algorithm and its implementation.” ACM Trans. Algorithms 3(2007).
URL http://doi.acm.org/10.1145/1290672.1290682
[26] Hinrichs, Susan, Kosak, Corey, O’Hallaron, David R., Stricker, Thomas M., andTake, Riichiro. “An architecture for optimal all-to-all personalized communication.”Proceedings of the sixth annual ACM symposium on Parallel algorithms andarchitectures. SPAA ’94. New York, NY, USA: ACM, 1994, 310–319.
URL http://doi.acm.org/10.1145/181014.181427
[27] Jan, Rong-Hong, Hwang, Fung-Jen, and Chen, Sheng-Tzong. “Topologicaloptimization of a communication network subject to a reliability constraint.” Reliabili-ty, IEEE Transactions on 42 (1993).1: 63 –70.
[28] Khuller, Samir and Saha, Barna. “On finding dense subgraphs.” In ICALP 09. 2009,597–608.
[29] Kumar, A., Sivakumar, M., Wang, Dexiang, and McNair, J.Y. “Effect of trafficpatterns on optical time-division-multiplexed/WDM networks for avionics.” Avionics,Fiber-Optics and Photonics Technology Conference, 2008 IEEE. 2008.
[30] Lawler, E.L. Combinatorial optimization: networks and matroids. DoverPublications, 2001.
URL http://books.google.com/books?id=m4MvtFenVjEC
[31] Liang, Weifa and Shen, Xiaojun. “A general approach for all-to-all routing inmultihop WDM optical networks.” Networking, IEEE/ACM Transactions on 14(2006).4: 914 –923.
[32] Liaw, Sheng-Chyang, Chang, Gerald, Cao, Feng, and Hsu, D. “Fault-tolerant routingin circulant networks and cycle prefix networks.” Annals of Combinatorics 2 (1998):165–172. 10.1007/BF01608486.
URL http://dx.doi.org/10.1007/BF01608486
[33] Lin, Hwa-Chun, Wang, Sheng-Wei, and Hung, Meng-Lin. “Finding Routing Pathsfor Alternate Routing in All-Optical WDM Networks.” Lightwave Technology, Journalof (2008).
[34] Liu, Yu, Tipper, D., and Siripongwutikorn, P. “Approximating optimal spare capacityallocation by successive survivable routing.” Networking, IEEE/ACM Transactionson 13 (2005).1: 198 – 211.
156

[35] Maier, Guido, Pattavina, Achille, De Patre, Simone, and Martinelli, Mario. “OpticalNetwork Survivability: Protection Techniques in the WDM Layer.” Photonic NetworkCommunications 4 (2002): 251–269. 10.1023/A:1016047527226.
URL http://dx.doi.org/10.1023/A:1016047527226
[36] Mohan, G., Siva Ram Murthy, C., and Somani, A.K. “Efficient algorithms for routingdependable connections in WDM optical networks.” Networking, IEEE/ACMTransactions on 9 (2001).5: 553 –566.
[37] Ni, Wenda, Zheng, Xiaoping, Zhu, Chunlei, Li, Yanhe, Guo, Yili, and Zhang, Hanyi.“Achieving Resource-Efficient Survivable Provisioning in Service DifferentiatedWDM Mesh Networks.” Lightwave Technology, Journal of (2008).
[38] Ou, Canhui, Zhang, Jing, Zang, Hui, Sahasrabuddhe, L.H., and Mukherjee, B. “Newand improved approaches for shared-path protection in WDM mesh networks.”Lightwave Technology, Journal of 22 (2004).5: 1223 – 1232.
[39] Poulsen, H.N., Richards, D.H., Ramapanicker, A., and Blumenthal, D.J. “NetworkLayer Modeling of WDM Fiber Optic Network Architectures for AerospacePlatforms.” Avionics, Fiber-Optics and Photonics Technology Conference, 2007IEEE. 2007, 60 –61.
[40] Ramamurthy, B. and Mukherjee, B. “Wavelength conversion in WDM networking.”Selected Areas in Communications, IEEE Journal on 16 (1998).7: 1061 –1073.
[41] Ramamurthy, S., Sahasrabuddhe, L., and Mukherjee, B. “Survivable WDM meshnetworks.” Lightwave Technology, Journal of 21 (2003).4: 870 – 883.
[42] Ramaswami, R. and Sivarajan, K.N. “Routing and wavelength assignment inall-optical networks.” Networking, IEEE/ACM Transactions on 3 (1995).5: 489 –500.
[43] Reardon, C., Profumo, J., and George, A.D. “Comparative Simulative Analysis ofWDM Lans for Avionics Platforms.” Military Communications Conference, 2006.MILCOM 2006. IEEE. 2006, 1 –7.
[44] Report, NAVY STTR Phase I. “Wavelength Division Multiplexed (WDM) Fiber-OpticNetwork Architecture Analysis, Modeling, Optimization and Demonstration forAerospace Platforms.” Report period - september 13, 2005 through february 28,2006, University of Florida, 2006.
[45] Report, NAVY STTR Phase II. “Wavelength Division Multiplexed (WDM) Fiber-OpticNetwork Architecture Analysis, Modeling, Optimization and Demonstration forAerospace Platforms.” May 2007 through june 2008, University of Florida, 2008.
[46] Saengudomlert, P., Modiano, E., and Gallager, R.G. “On-line routing andwavelength assignment for dynamic traffic in WDM ring and torus networks.”Networking, IEEE/ACM Transactions on 14 (2006).2: 330 – 340.
157

[47] Schroder, H., Sykora, O., and Vrto, I. “Optical All-to-All Communication for SomeProduct Graphs (Extended Abstract).” Proc. of the 24th Seminar on Current Trendsin Theory and Practice of Informatics, SOFSEM’97, Lecture Notes in ComputerScience 1338. Springer Verlag, 1997, 555–562.
[48] Shankaranarayanan, N.K. “Wavelength-routed optical networks.” Lasers andElectro-Optics Society Annual Meeting, 1994. LEOS ’94 Conference Proceedings.IEEE. vol. 2. 1994, 107 vol.2.
[49] Shen, L., Yang, X., and Ramamurthy, B. “Shared Risk Link Group (SRLG)-DiversePath Provisioning Under Hybrid Service Level Agreements in Wavelength-RoutedOptical Mesh Networks.” Networking, IEEE/ACM Transactions on 13 (2005).4: 918– 931.
[50] Shi, Ning. “K Constrained Shortest Path Problem.” Automation Science andEngineering, IEEE Transactions on 7 (2010).1: 15 –23.
[51] Stefanakos, S. and Erlebach, T. “Routing in all-optical ring networks revisited.”Computers and Communications, 2004. Proceedings. ISCC 2004. Ninth Interna-tional Symposium on. 2004.
[52] Sue, C.-C. “Wavelength routing with spare reconfiguration for all-optical WDMnetworks.” Lightwave Technology, Journal of 23 (2005).6: 1991 – 2000.
[53] Sun, Jun and Modiano, Eytan. “Capacity Provisioning and Failure Recovery for LowEarth Orbit Satellite Networks.” International Journal on Satellite Communications(2003).21: 259–284.
[54] Suurballe, J. W. “Disjoint paths in a network.” Networks 4 (1974).2: 125–145.
[55] Szlachcic, E. “Fault Tolerant Topological Design for Computer Networks.” De-pendability of Computer Systems, 2006. DepCos-RELCOMEX ’06. InternationalConference on. 2006, 150 –159.
[56] Tornatore, M., Maier, G., and Pattavina, A. “WDM Network Design by ILP ModelsBased on Flow Aggregation.” Networking, IEEE/ACM Transactions on 15 (2007).3:709 –720.
[57] Tornatore, M., Ou, Canhui, Zhang, Jing, Pattavina, A., and Mukherjee, B. “PHOTO:an efficient shared-path-protection strategy based on connection-holding-timeawareness.” Lightwave Technology, Journal of 23 (2005).10: 3138 – 3146.
[58] van der Zijpp, N.J. and Catalano, S. Fiorenzo. “Path enumeration by finding theconstrained K-shortest paths.” Transportation Research Part B: Methodological 39(2005).6: 545 – 563.
URL http://www.sciencedirect.com/science/article/pii/S019126150400102X
158

[59] Wang, D. and McNair, J. “A Torus-Based 4-Way Fault-Tolerant Backbone NetworkArchitecture for Avionic WDM LANs.” Optical Communications and Networking,IEEE/OSA Journal of 3 (2011).4: 335 –346.
[60] Wang, Dexiang, Kumar, A., Sivakumar, M., and McNair, J.Y. “A Fault-TolerantBackbone Network Architecture Targeting Time-Critical Communication for AvionicWDM LANs.” Communications, 2009. ICC ’09. IEEE International Conference on.2009, 1 –5.
[61] Weichenberg, G., Chan, V.W.S., and Medard, M. “High-reliability topologicalarchitectures for networks under stress.” Selected Areas in Communications, IEEEJournal on 22 (2004).9: 1830 – 1845.
[62] Wen, Yonggang and Chan, V.W.S. “Ultra-reliable communication over unreliableoptical networks via lightpath diversity: system characterization and optimization.”Global Telecommunications Conference, 2003. GLOBECOM ’03. IEEE. vol. 5.2003, 2529 – 2535 vol.5.
[63] Whitlock, B.K., Poulsen, H.N., Richards, D.H., and Blumenthal, D.J. “Physical-layerModeling and Simulation of WDM Fiber Optic Network Architectures for AerospacePlatforms.” Avionics Fiber-Optics and Photonics, 2006. IEEE Conference. 2006, 26–27.
[64] Wuttisittikulkij, L., Leelanunnukul, S., Arreewanit, S., and Prapinmongkolkarn, P.“Routing and wavelength allocation in multi-wavelength all-optical ring networks.”Communications, 1999. ICC ’99. 1999 IEEE International Conference on. 1999.
[65] Yen, Jin Y. “Finding the K Shortest Loopless Paths in a Network.” ManagementScience 17 (1971).11: pp. 712–716.
URL http://www.jstor.org/stable/2629312
[66] Yuan, X., Melhem, R., and Gupta, R. “Performance of multihop communicationsusing logical topologies on optical torus networks.” Computer Communications andNetworks, 1998. Proceedings. 7th International Conference on. 1998, 494 –501.
[67] Zang, Hui, Jue, Jason P, and Mukherjee, Biswanath. “A review of routing andwavelength assignment approaches for wavelength-routed optical WDM networks.”Optical Networks Magazine. 2000, 47–60.
[68] Zili, Deng, Nenghai, Yu, and Zheng, Li. “Designing Fault Tolerant NetworksTopologies Based on Greedy Algorithm.” Dependability of Computer Systems,2008. DepCos-RELCOMEX ’08. Third International Conference on. 2008, 227–234.
159

BIOGRAPHICAL SKETCH
Dexiang Wang received his Ph.D. from the University of Florida in the fall of 2011.
During his PhD study in the Department of Electrical and Computer Engineering at the
University of Florida, he was a member of the Wireless and Mobile Systems Laboratory
directed by Dr. Janise McNair. He received his B.E. degree in 1999 and M.E. degree
in 2002 from Huazhong University of Science & Technology (Wuhan, China), both in
Material Science & Engineering.
Before starting his PhD research at the University of Florida in 2006, he worked
for the telecommunication R&D team of Huawei Technologies on SDH optical network
switching equipments. After that, he worked as a software engineer for the R&D team
of UTStarcom Telecom on WCDMA-RNC products. He has been conducting his
PhD research in the areas of fault-tolerant all-optical communication systems, robust
multimedia communication over heterogeneous networks, green internet, wireless
network throughput optimization via transmission power control, and energy-efficient
cognitive radio sensor networks.
160