Embed Size (px)
Citation preview

Fault Diagnosis of Interconnected Cyber-Physical Systems
Marios M. Polycarpou
Professor, IEEE Fellow, IFAC FellowDirector, KIOS Research and Innovation Center of Excellence
Dept. Electrical and Computer EngineeringUniversity of Cyprus
7th oCPS PhD School on Cyber-Physical SystemsLucca, Italy, 14th June 2017
Motivation for fault diagnosis
Interconnected cyber-physical systems
Foundations of fault diagnosis
Sensor fault diagnosis
Application example: Smart Buildings
Concluding Remarks
Presentation Outline

Smart Phones
Smart Cars
Smart Grids
Smart Buildings
Smart Cities
Smart Camera Networks
Smart Water Networks
The Smart Revolution

Smart Phones
Smart Cars
Smart Grids
Smart Buildings
Smart Cities
Smart Camera Networks
Smart Water Networks
Smart-X
The Smart Revolution

HARDWARE
Sensing & actuation devices
Embedded computing
Wide area connectivity
Characteristics of Smart-X
SOFTWARE
Data management
Decision making algorithms
Learning algorithms
Optimization and control

Digital advances provide the ICT infrastructure not the INTELLIGENCE (so far)
Infrastructure will be further enhanced via the IoT
Smart-X vs. Smart-ready-X
Smart-X vs Smart-ready-X

Digital advances provide the ICT infrastructure not the INTELLIGENCE (so far)
Infrastructure will be further enhanced via the IoT
Smart-X vs. Smart-ready-X
Control systems and machine learning are at the heart of transforming Smart-ready-X to Smart-X
Smart-X vs Smart-ready-X

More proactive, more planning ahead
More discrete-event, more event-triggered
More machine learning, handling of larger volume of data, more heterogeneous data
Handling of more uncertainty, fault tolerance
Handling of human-machine interaction
Control Systems in the Smart-X Era

Fragility
The technological trend is towards: more complex and large-scale systems
more interconnected systems
more automation and autonomy
However if the data is faulty/inconsistent/missing, this may lead to: wrong decisions or escalation to a catastrophic failure
fault propagation from one subsystem to another
Unreliable and untrustworthy automation procedures

Fragility
The technological trend is towards: more complex and large-scale systems
more interconnected systems
more automation and autonomy
However if the data is faulty/inconsistent/missing, this may lead to: wrong decisions or escalation to a catastrophic failure
fault propagation from one subsystem to another
Unreliable and untrustworthy automation procedures
moreFRAGILE

Fragility of Interconnected Systems
Fragility is a crucial issue in an interconnected cyber-physical-social world
Fault Monitoring and Fault Tolerance are necessary components of Smart-X architectures
Black Swan Theory – Nassim Nicholas Talebmetaphor that describes an event that comes as a surprise, has a major effect, and is often inappropriately rationalized after the fact with the benefit of hindsight (extreme outliers)

Monitoring and Control
System
FaultMonitoring
and Diagnosis
u y
d f

Monitoring and Control
SystemController u yr
d f

Monitoring and Control
System
FaultAccommodation
Controller
FaultMonitoring
and Diagnosis
u yrd f
SupervisoryAlgorithm
Control Algorithm

Fault Scenarios
System/Process Faults
Actuator Faults
Sensor Faults
Communication Faults
Controller Faults
Environment Faults
Malicious Attacks (cyber-security)
P
FA
C
FD

Fault Diagnosis Steps
fault detection
fault isolation
fault identification and risk assessment
fault accommodation

Key Challenges for Fault Diagnosis
distinguish between faults and modeling uncertainty or measurement noise
exploit spatial and temporal correlations between variables
handle multiple faults
isolate faults in a large-scale system (needle in a haystack)
prevent “small” faults from escalating into a major failure
accommodate the fault – what to do in the presence of information about a fault?
Design smart SOFTWARE to handle faulty HARDWARE

Key Books on Fault Diagnosis
J. Gertler. Fault Detection and Diagnosis in Engineering Systems. CRC Press, 1998.
J. Chen and R. J. Patton. Robust Model-based Fault Diagnosis for Dynamic Systems. Kluwer Academic Publishers, 1999.
R. Isermann. Fault-Diagnosis Systems: An Introduction from Fault Detection to Fault Tolerance. Springer Verlag, 2006.
S. X. Ding. Model-based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools. Springer-Verlag London, 2008.
M. Blanke, M. Kinnaert, J. Lunze, and M. Staroswiecki. Diagnosis and Fault-Tolerant Control. Springer-Verlag Berlin Heidelberg, 2016.

N interconnected CPS. I‐th CPS: described by the pair
: physical part of the I‐th CPS, : cyber part of the I‐th CPS.
Interconnected CPS
( ) ( ),I I ( )I
( )I

Interconnected CPS – Single Agent

Interconnected CPS
Objective: Detect and isolate multiple faults that may occur in one or more CPS

Problem Formulation
where:
state vectorinput vector
Nominal state dynamics
Modeling uncertainty
Change in the system due to fault
Time profile of the fault
Interconnection dynamics
Modeling Uncertainty
The modeling uncertainty includes external disturbances as well as modeling errors.
where for each i = 1, …., n, the bounding function is known, integrable and bounded for all (x, u) in some compact region of interest
The handling of the modeling uncertainty is a key design issue in fault diagnosis architectures:- need to distinguish between faults and modeling uncertainty- structured vs. unstructured modeling uncertainty- trade-off between false alarms and conservative fault detection schemes

Fault Modeling
The term represents the deviations in the dynamics of the system due to a fault.
• is the fault function• The matrix characterizes the time profile of a fault which occurs at some unknown time
where denotes the unknown fault evolution rate.

Fault Influence for Distributed Systems
• Local Faults
• Distributed Faults
• Distributed Faults with Overlapping Signature
• Propagating Faults

Fault Isolation
Types of FAULT ISOLATION:• identify the type of fault that has occurred• identify the physical location of the fault
Class of fault functions :
where:• is an unknown parameter vector, which is assumed to belong to a known compact set
• is a known smooth vector field

Fault Diagnosis Architecture
There are N+1 Nonlinear Adaptive Estimators (NAEs) One of the NAEs is used for detecting and approximating faults The remaining N NAEs are isolation estimators used only after a fault has been detected for the purpose of fault isolation.
Decision Scheme
inputreference
FeedbackController
Estimatorand Approximation
Bank of Fault
Decision Scheme
Activation
Fault Detection and Isolation Architecture
Fault Detection
Fault Isolation
Fault Detection
Isolation Estimators
u Nonlinear Plant x
Alarm
Identification of thefault that has occurred

Fault Handling
T0
Tisol
x (t)
x (t)d
detectedfault
isolatedfault
Monitoring
Module
Td
t
occurredfault
0 < t < T0 : system is operating in a healthy condition. T0 < t < Td : period in which there is a fault, which however has
not yet been detected. Td < t < Tisol : period during which the fault has been detected,
but it is not yet known which particular fault has occurred. t > Tisol : the fault has been isolated.

Fault Detection and Approximation Estimator
where:
Adaptive approximation model
estimation poles
The initial weight vector is chosen such that
(healthy situation)
adjustable weights of the on-line neural approximator
estimated state vector

Adaptive Approximation Model
Nonlinear approximation model with adjustable parameters (e.g., neural networks) Linearly parameterized vs. nonlinearly parameterized It provides the adaptive structure for approximating on-line: Local modeling errors interconnection dynamics unknown fault functions

Learning Algorithm
where:
regressor matrix
The projection operator restricts the parameter estimation vector to a predefined compact and convex region.
state estimation error
Positive definite learning rate matrix
Dead-zone operator

Detection Threshold
where:
In the special case of a uniform bound on the modeling uncertainty the detection threshold becomes:
Robustness of the fault detection scheme is the ability to avoid false alarms. The above threshold make the FD scheme robust.

Detectability Conditions
Result holds for the special case of constant bound on the modeling uncertainty.
We are also able to obtain more simplified detectability conditions, but they are more conservative.
In general there is an inherent trade-off between robustness and fault detectability.
],[ 21 ttIf there exists an interval of time such that at least one component of the fault vector satisfies the condition
then a fault will be detected.
),( uxfi

Fault Isolation Estimators
N NAEs are activated for isolation (isolation estimators) after thedetection of a fault
Learning Algorithm
• Each isolation estimator corresponds to one of the possible types of parametric faults
• Adaptive threshold are designed based on the available information, similar to the concept of a matching filter
• isolation is achieved if every threshold is exceeded, except one (the one corresponding to the fault)

Incipient Fault Isolability
Intuitively, fault are easier to isolate if they are sufficiently “mutually different” in terms of a suitable measure
Fault isolability condition
Fault Mismatch FunctionThe difference between the actual fault function and the estimated fault function associated with any isolation estimator
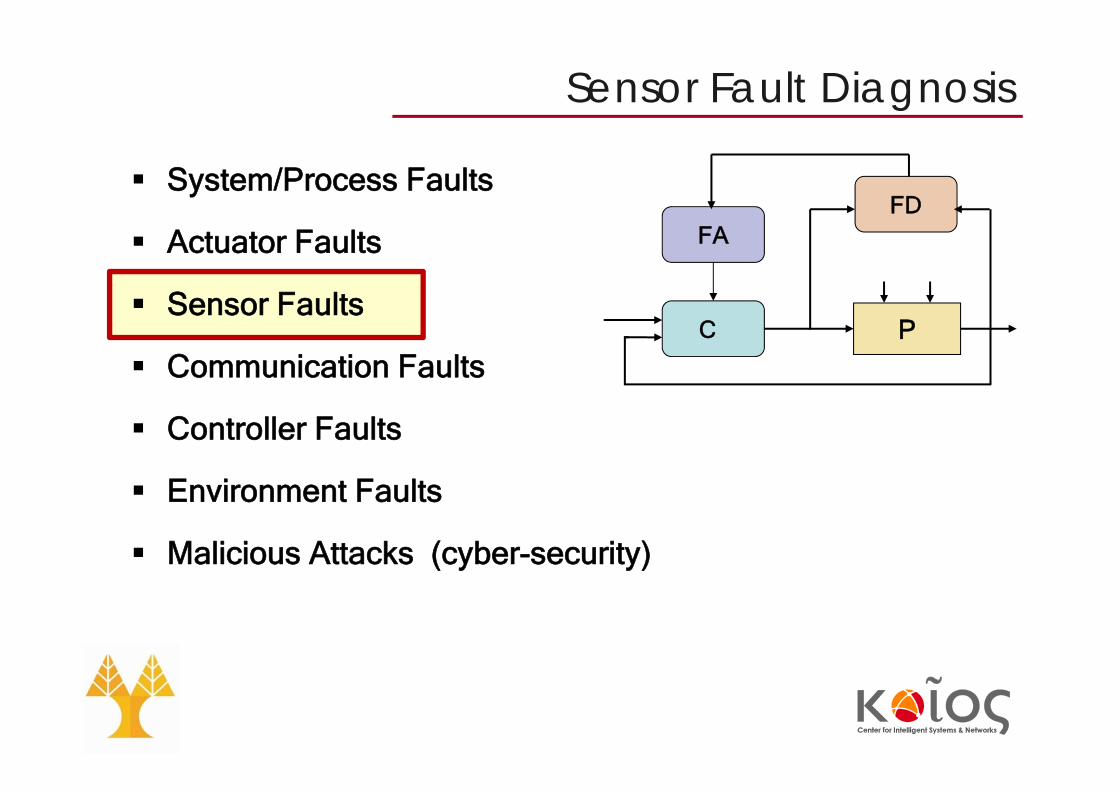
Sensor Fault Diagnosis
System/Process Faults
Actuator Faults
Sensor Faults
Communication Faults
Controller Faults
Environment Faults
Malicious Attacks (cyber-security)
P
FA
C
FD

N interconnected CPS. I‐th CPS: described by the pair
: physical part of the I‐th CPS, : cyber part of the I‐th CPS.
Interconnected CPS
( ) ( ),I I ( )I
( )I

Interconnected CPS
(physical part) a nonlinear system ( )I
( )I
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
known local dynamics
known interconnection dynamics
modeling uncertainty
( , )
( , , )
( , , )
I I I I I I
I I I I Iz
I I I
x A x x u
h x u C z
x u t
( )
( )
)
( )
( ) (
: local state vector: local input vector generated by a
feedback control agent using : interc
onnection vector
I
I
I
I
Ir
xu
z

Interconnected CPS
(physical part) Sensor set used for measuring the linear combination of states
( )I
( )I
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )I I I I Iy t C x t d t f t
( )
( )
( )
: local output vector : measurement noise : fault vector
I
I
I
ydf
( ) ( ) I IC x

Interconnected CPS
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )I I I I Iz z z zy t C z t d t f t
(cyber part) control agent that generates the input based on some reference signal , the measured output and the transmitted sensor information
( )Iu
( )Ir
( )I
( )I
( )Iz

Interconnected CPS
Objective: Detect and isolate multiple sensor faults that may occur in one or more CPS

Distributed Sensor Fault Diagnosis Architecture
(cyber part)monitoring agent allowed to exchange information with the neighboring agents
( )I( )I
Task:Detection & isolation of multiple sensor faults in
Detection of propagated sensor faults in
( )I
( )Iz
( )Iz

G : global decision logic collects and processes combinatorially the decisions of the monitoring agents
Task: Isolation of sensor faults propagated in the cyber layer due to the information exchange between monitoring agents
Distributed Sensor Fault Diagnosis Architecture

Monitoring Agent
monitoring agent ( )I

Monitoring Agent
The monitoring of the local sensor set is decomposed into NI modules The module monitors the group of sensors
( )I
( , )I q ( , )I q( , ) ( , ) ( , ) ( ) ( , ) ( , ): yI q I q I q I I q I qC x d f

Monitoring Agent
Task: Detection of sensor faults in and/or ( , )I q
: q‐th module of the I‐th monitoring agent( , )I q
( )Iz

Monitoring Agent
The decisions of the NI modules are aggregated and processed combinatorially for isolating the combination of multiple sensor faults that have occurred and inferring the presence of propagated sensor faults

j‐th residual,
• : estimation model based on thenonlinear observer
( , ) ( , )( ( ,) ( ) )ˆ ,j j
I II q I q qj
Iy y C x j
( , )ˆ I qx
( , ) ( ) ( , ) ( ) ( , ) ( )
( ) ( , ) ( )
(
( )
( , ), ) ( , ) ( , )
ˆ ˆ ˆ( , )ˆ ( , , )
ˆ
I q I I q I I q I
I I q I
I q I q I q
Iz
I q
x A x x uh x u
L C
y
y x
( , )j
I qy
(1)
(2)
Monitoring Module
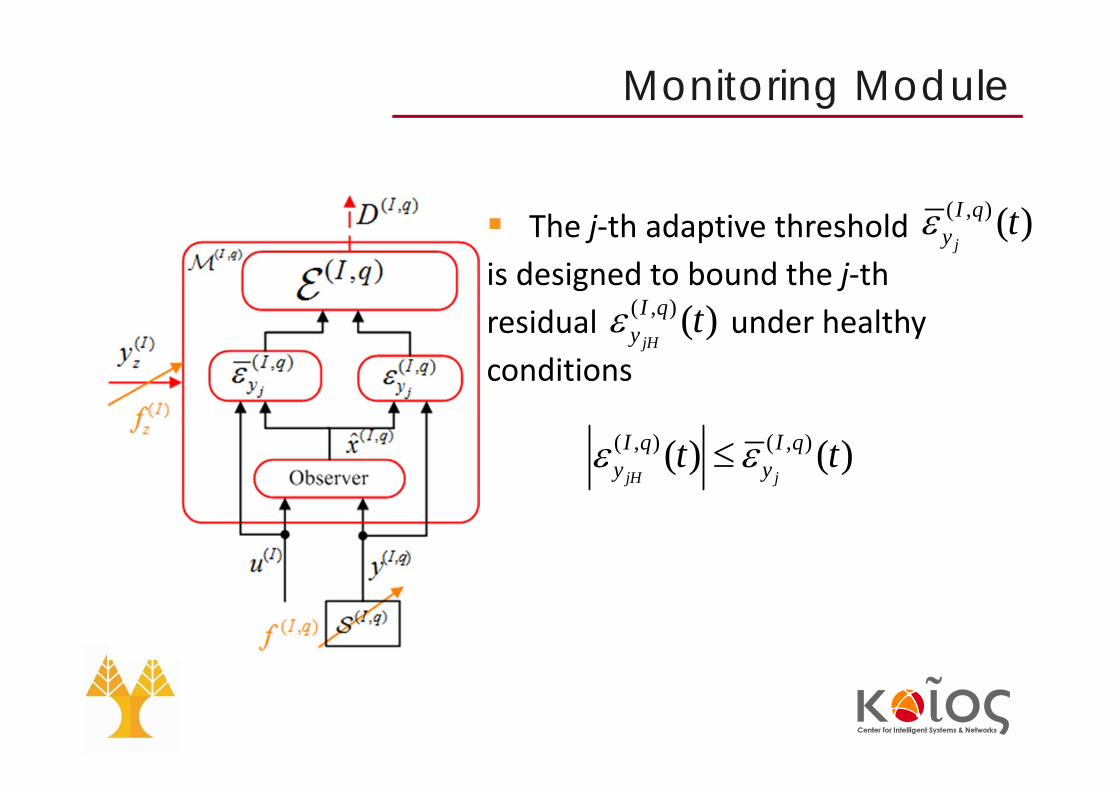
The j‐th adaptive threshold is designed to bound the j‐th residual under healthy conditions
( , ) ( )j
I qy t
( , ) ( )jH
I qy t
Monitoring Module
( , ) ( , )( ) ( )jH j
I q I qy yt t

The j‐th adaptive threshold can be implemented using linear filters
( , ) ( , ) ( ) ( , ) ( , )ˆ( ) ( ( ), ( ), ) (( ) ) ( )j
I q I q I I q I qy I jt x t u t t Z t YH s t
Adaptive Threshold Computation
1
2
( , ) ( , ) ( , )
1 2( , ) ( , )(
( , ) (
, ) (
, ) ( , )
( , ) ( , ) ( )
, )
( , )
( ) ( ) ( )
ˆ( ) ( ( ), ( ), ) ( )
( )
( )
( ) , ( ) , ( )
,
I I I
I q I
I q I q I q
I q I q I
q I qj I
I q I qI q I qj I
I qB
I h
H s
H s
H s H s H s
Z t E t E t
E t x t u t
s s
t E t
s
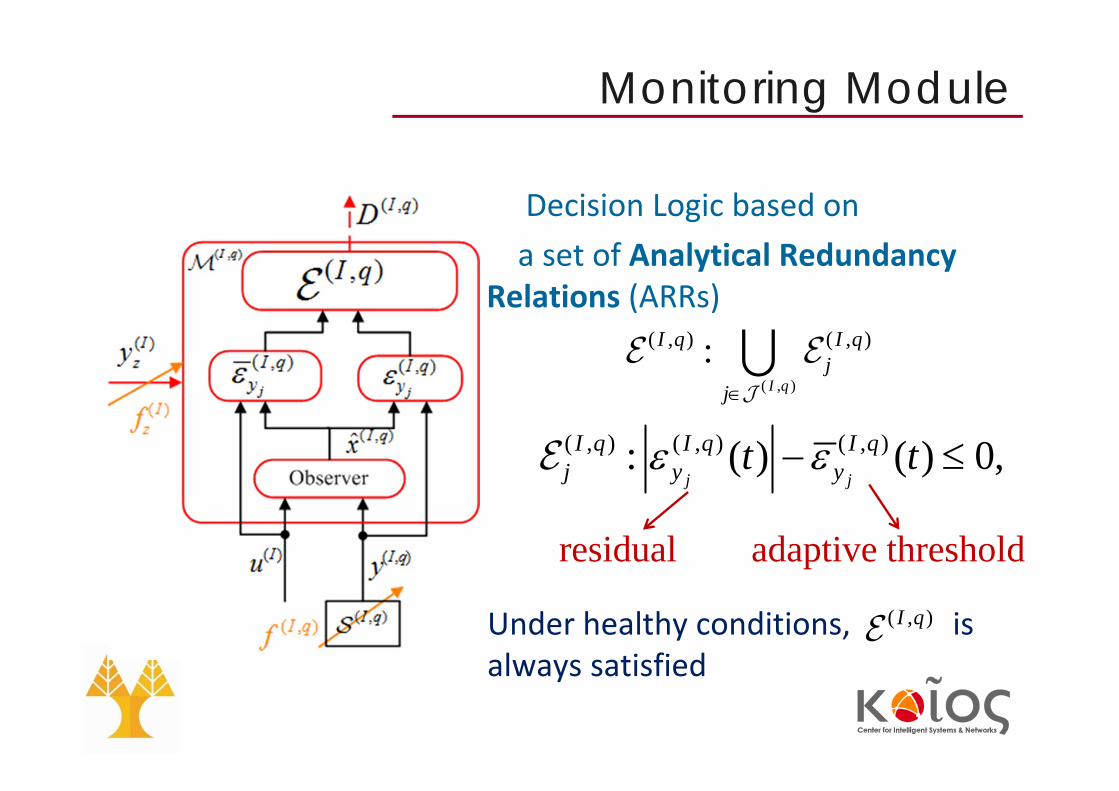
Decision Logic based on a set of Analytical Redundancy
Relations (ARRs)
( , ) ( , ) ( , ): ( ) ( ) 0,j j
I q I q I qj y yt t
( , )
( , ) ( , ):I q
I q I qj
j
residual adaptive threshold
Monitoring Module
Under healthy conditions, is always satisfied
( , )I q

Robustness and Structured Fault SensitivityTheorem: The distributed sensor fault diagnosis design guarantees that:
(a) Robustness: If neither the local sensor set nor the transmitted sensor information are affected by sensor faults, then the set of ARRs is always satisfied.
(b) Structured fault sensitivity: If there is a time instant at which is not satisfied, then the occurrence of at least one sensor fault in is guaranteed.
( , )I q
( )Izy
( , )I q
( , )I q
( , ) ( )I q Iz
V. Reppa, M. Polycarpou and C. Panayiotou, “Distributed Sensor Fault Diagnosis for a Network of Interconnected Cyber-Physical Systems,” IEEE Transactions on Control of Network Systems, vol 2, no. 1, pp. 11-23, March 2015.

Monitoring Agent

Local Multiple Sensor Fault Isolation
Example:
( ,1) ( )
( ,2) ( ) ( )
( ,3) ( )
{1} ,
{2}, {3}
{3}
I I
I I I
I I
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 1 3 2
( )
( ,1)
( ,2)
( ,3
2
)
3 1 3, , , , , ,
1 0 0 1 1 0 1 1 10 1 1 1 1 1 1 1 10 0 1 0 1 1 1 1 1
I I I I I I I I I I I I I I Ic
I
z
I
I
zf f f f f f f f f f f f f f
( )Izy

( )
1( ) 1
0
ID t
( ) ( ) ( )1 2( ) , I I I
s t f f
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 1 3 2
( )
( ,1)
( ,2)
( ,3
2
)
3 1 3, , , , , ,
1 0 0 1 1 0 1 1 10 1 1 1 1 1 1 1 10 0 1 0 1 1 1 1 1
I I I I I I I I I I I I I I Ic
I
z
I
I
zf f f f f f f f f f f f f f
Diagnosis Set:
Decision on the presence of sensor faults in ( ) ( )
( )( ) ( )
0, ( ) ( )
1, ( )
I II z s
z I Iz s
f tD t
f t
Local Multiple Sensor Fault Isolation
( )zIy

( ) ( )( )
( ) ( )
0, ( ) ( )
1, ( )
I II z s
z I Iz s
f tD t
f t
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 2 3 1 2 1 3 2
( )
( ,1)
( ,2)
( ,3
2
)
3 1 3, , , , , ,
1 0 0 1 1 0 1 1 10 1 1 1 1 1 1 1 10 0 1 0 1 1 1 1 1
I I I I I I I I I I I I I I Ic
I
z
I
I
zf f f f f f f f f f f f f f
( )
1( ) 1
1
ID t
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1 3 1 2 3( ) , , , , , , ,I I I I I I I I I
s z z ct f f f f f f f
Diagnosis Set:
Decision on the presence of sensor faults in
Local Multiple Sensor Fault Isolation
( )zIy

Global Multiple Sensor Fault Isolation

Observed pattern of sensor faults in transmitted sensor information: (1) (2) ( )( ) ( ) ( ) ( )N
z z z zD t D t D t D t
(1) (2) (3) (1) (2) (1) (3) (2) (3) (1) (2) (3)5 1 4 5 1 5 4 1 4 5 1
(1)
(2)
(3)
4, , , , ,
1 0 * 1 1 * 10 1 * 1 * 1 1* * 1 * 1 1 1
f f f f f f f f f f f f
Semantics of ‘*’: the sensor fault involved in the ARR can explain why the ARR is violated, while the ARR may be satisfied although the corresponding fault has occurred
Global Multiple Sensor Fault Isolation

Learning Approaches for Fault Diagnosis
Reduce adaptive thresholds by reducing the bound of the modeling uncertainty using learning techniques.
Design and analysis of an adaptive approximation methodology to learn the modeling uncertainty
V. Reppa, M. Polycarpou and C. Panayiotou, “Adaptive approximation for multiple sensor fault detection and isolation of nonlinear uncertain,” IEEE Transactions on Neural Networks and Learning Systems, vol 25, no. 1, pp. 137-153, January 2014.

Fault Diagnosis and Cybersecurity
Targeted faults
Early detection is crucial
Sensor placement is a key issue
Need to consider the impact dynamics

Application Example: Smart Buildings

48% of energy consumption is for buildings (27% for transportation; 25% for factories)
76% of electricity consumption is for buildings (23% for factories; 1% for transportation)
87% of our time is spent indoors
How critical are buildings?

48% of energy consumption is for buildings (27% for transportation; 25% for factories)
76% of electricity consumption is for buildings (23% for factories; 1% for transportation)
87% of our time is spent indoors
6% in automobiles and public transportation
7% outdoors
How critical are buildings?

The Transformation of Buildings

The Transformation of Buildings

Sensors (more self-aware)
Actuators (more automation)
Intelligent decision making (energy efficiency, safety and security, fault diagnosis, etc.)
Communication devices (building to user; user to building; building to building; etc.)
The Electronic Transformation Inside

Sensors (more self-aware)
Actuators (more automation)
Intelligent decision making (energy efficiency, safety and security, fault diagnosis, etc.)
Communication devices (building to user; user to building; building to building; etc.)
Internet of Things (IoT)
The Electronic Transformation Inside

Need to monitor and control: indoor living conditions and safety of the occupants energy consumption of large-scale buildings
The technology is available (smart-ready): building automation is well established Cyber-physical systems for smart buildings sensing and actuation devices are widely available
Need to develop smart software to enable the coordination and scheduling of actions for handling dynamic and uncertain environments
Motivation for Smart Buildings

Topics pursued at KIOS Research Center
• KIOS Research Center for Intelligent Systems and Networks was founded in 2008
• Currently about 50 researchers working on Monitoring, Control and Security of Critical Infrastructure Systems
• Awarded a TEAMING project from H2020 to upgrade to a Center of Excellence for Research and Innovation (more than €40M)

Smart Buildings Topics pursued at KIOS
• Distributed fault diagnosis and control of HVAC systems
• Contamination event detection and isolation in large-scale buildings
• Security surveillance using smart camera networks
• Cognitive agents for on-line reconfiguration of in smart buildings

Topics pursued at KIOS Research Center
• Distributed control and fault diagnosis of large-scale HVAC systems
• V. Reppa, P. Papadopoulos, M. Polycarpou and C. Panayiotou, “A Distributed Architecture for HVAC Sensor Fault Detection and Isolation,” IEEE Transactions on Control Systems Technology, vol. 23, pp. 1323‐1337, July 2015.
• V. Reppa, P. Papadopoulos, M. Polycarpou, and C. Panayiotou, “A Distributed Virtual Sensor Scheme for Smart Buildings based on Adaptive Aproximation,” Proceedings of the International Joint Conference on Neural Networks, World Congress on Computational Intelligence (IJCNN 2014), pp. 99‐106, July 2014.
Zone 1 Zone 2
Zone 3 Zon
e 4
Zone 5
Zone 6
Zone 7
,12dA
,13dA ,23dA
,24dA ,45dA
,34dA,56dA
,46dA
,67dA
,47dA
Zone N Zone N-1
Zone N-2
1u
Storage Tank
Condenser
Heat Pump
stu
2u 5u
4u
3u6u
7u
2Nu
Nu 1Nu

Topics pursued at KIOS Research Center
• Contamination event detection and isolation in large-scale buildings
• M. Michaelides, V. Reppa, M. Christodoulou, C. Panayiotou and M. Polycarpou, “Contaminant Event Monitoring in Multi‐zone Buildings Using the State‐Space Method,” Building and Environment, vol. 71, pp. 140‐152, January 2014. (2014 Best Paper Award).
• D. Eliades, M. P. Michaelides, C. Panayiotou and M. Polycarpou, “Security‐Oriented Sensor Placement in Intelligent Buildings”, Building and Environment, vol. 63, pp. 114‐121, March 2013.

Topics pursued at KIOS Research Center
• Security surveillance using smart camera networks
• C. Laoudias, P. Tsangaridis, M. Polycarpou, C. Panayiotou, C. Kyrkou and T. Theocharides, “'Cooperative Fault‐Tolerant Target Tracking in Camera Sensor Networks," Proceedings of the IEEE International Conference on Communications (ICC’2015), June 2015.
• C. Kyrkou, C. Laoudias, T. Theocharides, C. Panayiotou and M. Polycarpou, "Adaptive Energy‐Oriented Multi‐Task Allocation in Smart Camera Networks", IEEE Embedded Systems Letters, vol. 8, no. 2, pp. 37‐40, June 2016.

Topics pursued at KIOS Research Center
• Cognitive agent for on-line reconfiguration in smart buildings
• G. Milis, D. Eliades, C.G. Panayiotou and M. Polycarpou, “A Cognitive Fault‐Detection Design Architecture,” in Proceedings of IEEE World Congress on Computational Intelligence (WCCI’2016), July 2016.
• G. Milis, C.G. Panayiotou and M. Polycarpou, “Semantically‐Enhanced Online Configuration of Feedback Control Schemes,” IEEE Transactions on Cybernetics, 2017 (to appear).
Topics pursued at KIOS Research Center
• Distributed fault diagnosis and control of HVAC systems
• Contamination event detection and isolation in large-scale buildings
• Security surveillance using smart camera networks
• Cognitive agent for on-line reconfiguration of in smart buildings

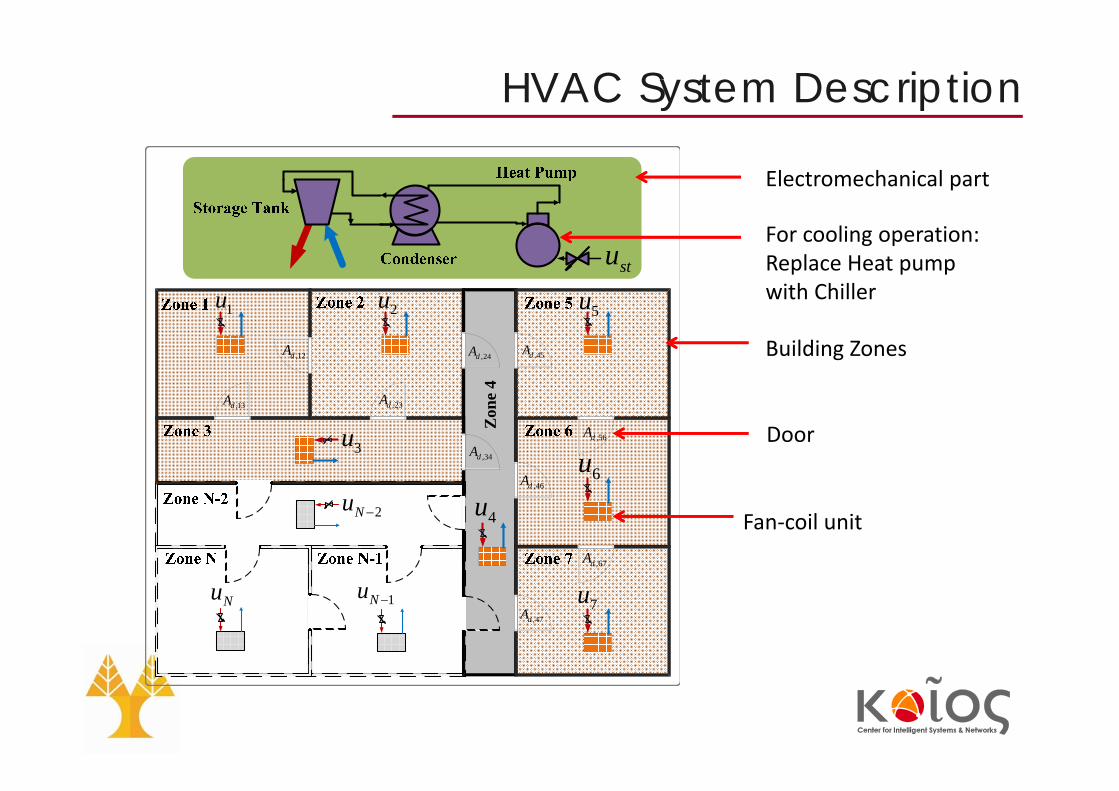
HVAC Description
HVAC systems consist of: A number of electrical and mechanical components for
Heating (i.e., boilers, heating coils, heat pump) Cooling (i.e., cooling towers, chillers, cooling coils) Ventilating (i.e., fans, supply/return ducts, mixing boxes)
A number of building zones (i.e., interconnected or not) the dynamics of a zone in the building are affected by the dynamics of their neighbouring zones
Types of faults in HVAC systems: actuator/process faults (i.e., fouled heat exchangers, stuck dampers, leaking
valves, broken fans) sensor faults (i.e., drifting, stuck‐at‐zero), communication faults (i.e., wire break).

Faulty Situations in HVAC Systems
The recovery of faulty situations in HVAC systems: shutting down the operation of the system (inconvenient and possibly
ineffective from the viewpoint of energy) reconfiguring the controller(s) via a fault tolerant control scheme, using the
outcome of a fault detection and isolation mechanism
Early diagnosis and accommodation of faults is critical since local faults effects may propagate from a local subsystem to neighbouring subsystems the physical interconnections the distributed control scheme (local controllers may use information
transmitted from neighbouring controllers to achieve the best possible tracking performance)
Zon
e 4
,12dA
,13dA ,23dA
,24dA ,45dA
,34dA,56dA
,46dA
,67dA
,47dA
1ustu
2u 5u
4u
3u6u
7u
2Nu
Nu 1Nu
Fan‐coil unit
For cooling operation: Replace Heat pump with Chiller
Electromechanical part
Building Zones
Door
HVAC System Description

HVAC System Description
Storage Tank
Condenser
Heat Pump
stu
,, ( )( ) ( ) ( ) ( )
( ( )) ( ),
( )1 1 , ( ) ( )( )
1, ( ) (
( ) ( ) ( )
(
)
)
( )( )
i
stst st
st
st max szs st i i max
ist st
st stpl st
st st
ost o max
s ma
st
x
st o m
z
s
x
t
a
Ud aP u t u t Udt C C
a a
T t T t T t
T T t T tC C
T tp T t T t
t
T tT t
TP T
T t T t T
T t
Zone 1 Zone 2
Zone 3 Zon
e 4
Zone 5
Zone 6
Zone 7
,12dA
,13dA ,23dA
,24dA ,45dA
,34dA,56dA
,46dA
,67dA
,47dA
Zone N Zone N-1
Zone N-2
1u 2u 5u
4u
3u6u
7u
2Nu
Nu 1Nu
Storage Tank
Condenser
Heat Pump
stu
Zone 1
,12dA
,13dA
1u
,
1
( ) ( ) ( (
( )
( )( )
( )
(
( )
( ) ( )
))
1( ( ) ) ( ) ( )
( )
, ) 2(max( )
(
)
)
(
( )
( )
i
i i
i i
ij i
i
i
i i
i i i
ii
i
j
j
j
i
i jj
i i
zi max szi amb
z z
w zi z zz
z
z z
jz z
z
z
a
z z
z z
s
ir p
jz
d p v
z
z
t
T t
T t
T t T
T tT t T t
T t T t
T t
d aU au t T t
dt C C
hA aT t a T t
C C C
T t
C
T t
sgnC
C tA C
) ,( )iz
T t

( ) ( )1 1 , ( ) ( )( ( ))
1, ( ) ( )
st ost o max
s st max
st o max
T t T tp T t T t TP T t T
T t T t T
Temperature nonlinear dynamics for water in the storage tank:
Performance coefficient of the heat pump
HVAC System Modelling
M. Zaheer‐Uddin and R. Patel, “Optimal tracking control of multizone indoor environmental spaces,” Journal of Dynamic Systems, Measurement and Control, vol. 117, no. 3, pp. 292–303, 1995.
,,
( ) ( ( )) ( ) ( ) ( ( ) ( ))
( ( ) ( )) ( ),
i
st maxst szs st st i i max z st
ist st
st stst pl st
st st
UdT t aP T t u t u t U T t T tdt C C
a aT t T t T tC C
1,..., N

Temperature nonlinear dynamics of air in the i‐th zone
HVAC System Modelling
i iz air p zC C V
air heat capacity
,
1
( )( ( ) ( )) ( ) ( ( ) ( ))
1( ( ) ( )) ( ( ) ( )) ( )
( ( ) ( )) ( ) 2( ) ( ) ( ) ,
i i
i i
i i
i i
i ij i j i
ii i i
j i ij i j i
ii
z zi max szst z i z amb
z z
w zi z z z z z
jz z z
air pz z d z p v z z
jz
dT t aU aT t T t u t T t T t
dt C C
hA aT t T t a T t T t T t
C C C
Csgn T t T t A T t C C T t T t
C

HVAC System with Feedback Control
(1) (1)
(2)
( )Ncu
(2)y
(1)cu (1)y
( ) N ( ) N
(2)cu
( )Ny
(2)
(1)
(2)
( ) N( )Nrefy
(1)refy
(2)refy
local linear and nonlinear dynamics
( ) ( ) ( ) ( ) ( ) ( )
interconnection dynamics
( ) ( ) ( )
modknown disturbances
( ) ( ) ( )
( ) ( ) ( ( ), ( )) ( )
( ( ), ( ))
( ( )) ( )
i i i i s i i
i i j
i i i
x t A x t g x t x t u t
h x t x t
d t r t
eling uncertainty
( ) ( )
permanent actuator f
( )
ault
(,
( ) ( ) ,)ai
cii fu t u t t
(1)
( )Ncu
(1)cu
( ) N
(2)cu (2)
(1)
( )Ncu
(1)cu
(1)y
( ) N
(2)cu
( )Ny
(2)
(1)
(2)
( ) N( )Nrefy
(1)refy
(2)refy
(2)y
( ) ( ) ( )( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
reference signal
( ) ( )
permanent actuator fa
(
lt
)
u
1( ) ( )( ( ), ( ))( ( ), ( ))
( )
( ( )) ( )
( ) ( )
( ) ( ) ,
i i ic i s i
i i j
i i iref
i i ir
ia
ef
i ic
u t A x tg x t x th x t x t
d t y t
k y t x t
u t u t f t
( ) ( ) ( ) ( )
permanentsensor fau
(
l
)
t
: ( ) ( ) ( ) ( ),: ( ) ( ) ( ) ,( )
s s s s ss
si ii i i
y t x t n t f ty t x t n f tt
(1) (1)
( )Ncu
(2)y
(1)cu (1)y
( ) N ( ) N
(2)cu
( )Ny
(2)
(1)
(2)
( ) N( )Nrefy
(1)refy
(2)refy (2)

HVAC System Modelling
HVAC temperature dynamics represented in nonlinear state space form
local linear and nonlinear dynamics
interconnection dynamics known disturbances modeling uncertainty
: ( ) ( ) ( ( ), ( )) ( )
( ( ), ( ), ( )) ( ) ( ) ,
s s s s s s s s
s s s s s
x t A x t g x t d t u t
h x t x t u t d t r t
local linear and nonlinear dynamics
( ) ( ) ( ) ( ) ( ) ( ) ( )
interconnection dynamics known disturbances
( ) ( ) ( ) ( ) ( ) ( )
: ( ) ( ) ( ( ), ( )) ( )
( ( ), ( )) ( ( ))
i i i i i s i i
i i j i i i
x t A x t g x t x t u t
h x t x t d t r
modeling uncertainty
( ) ,t

Nominal Distributed Control
Distributed control laws: Control law for :
Control law for :
Sensor’s Structure:
reference signal
1( ) ( ) ( ( ), ( ), ( ))( ( ), ( ))
( ( )) ( ) ( ) ( )
s s s s sc s s s
s s s s s sref ref
u t A x t h x t x t u tg x t d t
d t k y t x t y t
( ) ( ) ( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
reference signal
1( ) ( ) ( ( ), ( ))( ( ), ( ))
( ( )) ( ) ( ) ( )
i i i i i jc i s i
i i i i i iref ref
u t A x t h x t x tg x t x t
d t k y t x t y t
( ) ( ) ( ) ( )
permanentsensor fau
(
l
)
t
: ( ) ( ) ( ) ( ),
: ( ) ( ) ( ) ,( )
s s s s ss
si ii i i
y t x t n t f t
y t x t n f tt
( ) ( )
permanent actuator fau t
(
l
)
( ) ( ) ( ),
( ) ( ) ,( )
s s sc a
i i iac
u t u t f t
u t u t f t
Faults in Actuators:

Distributed Sensor Fault Diagnosis Scheme
(1) (1) (1) (1) (1) (1) (1
(
)
(1) (1) (1) (2 1 ( )) ) 1
: ( ) ( ) ( ( ), ( )) ( )( ( ), ) (( ) ( )) ( )
sx t A x t g x t x t u th x t d t rx t t
(2) (2) (2) (2) (2) (2) (2
(
)
(2) (2) (2) (1 2 ( )) ) 2
: ( ) ( ) ( ( ), ( )) ( )( ( ), ) (( ) ( )) ( )
sx t A x t g x t x t u th x t d t rx t t

ARR: Boolean decision signal:
Residual generation:
Distributed nonlinear estimator:
( )( )
( )
0, ( ) ,
1,
ii D
iD
t tD t
t t
( ) ( ) ( ):| ( ) | ( ),i i iy yt t
( ) ( ) ( ){ 0 :| ( ) | ( )}i i iD y yt inf t t t
( ) ( ) ( )ˆ( ) ( ) ( )i i iy t y t x t
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( )
ˆ ˆ( ) ( ) ( ( ), ( )) ( )
( ( ), ( )) ( ( ))
ˆ( ) ( ) ,
( ) ( ) : ,[ ]
i
i
i i i i s i ic
i i i i
i i i
ji
x t A x t g y t y t u t
h y t y t d t
L y t x t
y t y t j
Distributed Sensor Fault Diagnosis Scheme

Distributed Fault Detection: Analytical redundancy relation (ARR): Boolean decision signal:
Residual generation:
Distributed nonlinear estimator:
Distributed Sensor Fault Diagnosis Scheme
( )( )
( )
0, ( ) ,
1,
ii D
iD
t tD t
t t
( ) ( ) ( ):| ( ) | ( ),i i iy yt t
( ) ( ) ( ){ 0 :| ( ) | ( )}i i iD y yt inf t t t
( ) ( ) ( )ˆ( ) ( ) ( )i i iy t y t x t
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( )
ˆ ˆ( ) ( ) ( ( ), ( )) ( ) ( ( ), ( ))
ˆ( ( )) ( ) ( ) ,
( ) ( ) : ,[ ]
i
i
i i i i s i i i ic
i i i i i
ji
x t A x t g y t y t u t h y t y t
d t L y t x t
y t y t j

Adaptive threshold:
Distributed Sensor Fault Diagnosis Scheme
( ) ( ) ( ) ( ) ( )| | ( , ),i i i s i i sg n n g n n
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )1| | ( , ) ( , , , )ij ij i i
i iij
i i i i j j i i id z
jz
h p A y y a n h n n y yC
( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 3( , ) ,
2 2
j i ii i j i j i
ej i j i
y y yy y n n
y y y y
( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
0
( ) ( ) ( ) ( ) ( ) ( )( , , ) ( , , , ) ,
()
i i
i i
ti i t i i i t i i iy
i i s i i i ic
e x n e L n r
g n n u h n n y y d
( ) ( )| ( ) |i ix t x( ) ( )( )| |i i
LA t i te e

ARR’s:
Boolean decisions functions:
Residual generation:
( ) ( ) ( )
( ) ( ) ( )
:| ( ) | ( ),
:| ( ) | ( ),a a
s s
i i ia y y
i i is y y
E t t
E t t
( ) ( )( ) ( )
( ) ( )
0, 0, ( ) , ( ) ,
1, 1, a s
a s
i iI Ii i
a si iI I
t t t tI t I t
t t t t
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
{ :| ( ) | ( )}
{ :| ( ) | ( )}a a a
s s s
i i i iI D y y
i i i iI D y y
t inf t t t t
t inf t t t t
( ) ( ) ( )
( ) ( ) ( ) ( )
ˆ( ) ( ) ( ),ˆˆ( ) ( ) ( ) ,
a
s
i i iy a
i i i iy s s
t y t x t
t y t x t f
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
adaptive filter
( ) ( ) ( ) ( ) ( )
( )ˆ ˆ( ) ( ) ( ( ), ( ))( ( ) )( ( ), ( )) ( ( ))
ˆ( ) (
ˆ ( )
) ( ),
( ) ( ) ( ( ), ( ))
i
a
i i i i i isa a c
i i i i
i i i ia y a a
i i i i isa aL
iax t A x t g y t y t u t
h y t y t d t
L t t f t
t A t g y t y
f t
t
adaptive law
( ) ( ) ( ) ( ) ( )
,
ˆ ( ) ( ) ( ) ,ai i i i i
a a a yf t t D t
nonlinear estimator
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
( )
(
(
)
ˆ ˆ( ) ( ) ( ( ), ( ) ) ( )
( ( ) , ( ))
ˆ( ( )) ( ) ( ) ( )
ˆ ( )ˆ
,
( )
( )i
s
i i i i s i is s c
i i
i i i i i is y s
i
i i is L
s
is
s
x t A x t g y t y t u t
h y t y t
d t L t t f t
t
f t
A
f t
adaptive filter
) ( ) ( ) ( )
( )( ) ( ) ( )
( )
adaptive law
( ) ( ) ( ) ( ) ( )
( )
( ) ( )
, ,
ˆ ( ) ( ( ) 1) ( )
ˆ
,
ij
i
s
i i is c
ii i j
d ij K
i i i i is
s
s s y
i
t L u t
p A y yfx
f t t D t
Distributed Sensor Fault Diagnosis Scheme

Local Fault Identification: ARR’s:
Boolean decisions functions:
Residual generation:
Distributed Sensor Fault Diagnosis Scheme
( ) ( ) ( )
( ) ( ) ( )
:| ( ) | ( ),
:| ( ) | ( ),a a
s s
i i ia y y
i i is y y
E t t
E t t
( ) ( )( ) ( )
( ) ( )
0, 0, ( ) , ( ) ,
1, 1, a s
a s
i iI Ii i
a si iI I
t t t tI t I t
t t t t
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
{ :| ( ) | ( )}
{ :| ( ) | ( )}a a a
s s s
i i i iI D y y
i i i iI D y y
t inf t t t t
t inf t t t t
( ) ( ) ( )
( ) ( ) ( ) ( )
ˆ( ) ( ) ( ),ˆˆ( ) ( ) ( ) ,
a
s
i i iy a
i i i iy s s
t y t x t
t y t x t f

Local Fault Identification: Distributed adaptive nonlinear estimation scheme:
Distributed Sensor Fault Diagnosis Scheme
nonlinear estimator
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )ˆ ˆ( ) ( ) ( ( ), ( ))( ( ) ) ( ( ), ( )) ( ( ))
ˆ( ) ( ) ( ),
(
( )
ˆ )i
a
i i i i s i i i i i ia a c
i i i ia y
i
a
a
a
a
iL
x t A x t g y t y t u t h y t y t d t
L t t f t
f t
t A
adaptive lawadaptive filter
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )ˆ( ) ( ( ), ( )), ( ) ( ) ( ) ,a
i i i s i i i i i ia a a a yt g y t y t f t t D t
nonlinear estimator
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )ˆ ˆ( ) ( ) ( ( ), ( ) ) ( ) ( ( ) , ( )) ( ( ))
ˆ( ) ( ) ( ),
ˆ ˆ( ) ( )i
s
i i i i s i i i i i is s c
i i i is y
i is s
s
x t A x t g y t y t u t h y t y t d t
L t t f
f t f t
t
adaptive filter adaptive law
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) (( ) ) ( ) ( ) ( ) ( ) ( )
( )ˆ( ) ( ) ( ) , , ( ) ( ( ) 1) ( ) ,ˆ
ij s
i
ii i i i i i i i j i i i i i
s L s s c d s s s yii
j Kst A t L u t p A y yf f t t D t
x

Fault Isolation Observed fault pattern: Fault isolation signature matrix
( ) ( ) ( )( ) [ ( ), ( )]i i ia sI t I t I t
( )iF
i
i
( ) ( ) (i) (i)K I( )
(i) (i) (i)s I K I
0, if ( ) f (t) or D (t)=0( )
1, if f (t) or f (t)i
i is Ii
K
f tI t
Distributed Sensor Fault Diagnosis Scheme

Distributed Fault Isolation: Observed fault pattern of propagated sensor faults: Fault isolation signature matrix
Distributed Sensor Fault Diagnosis Scheme
( )i
iF
( )( ) ( ) : { }i j
jK K iI t I t j K i
(1,2) (1) (2),s ssf f f (1,3) (1) (3),s ssf f f (2,3) (2) (3),s ssf f f (1,2,3) (1) (2) (3), ,ss s sf f f f

Simulation Results
Consider a seven‐zone HVAC system where the architectural arrangement of the seven zones is presented by the diagram
PARA METERS OF THE SEVEN-ZONE HVAC SYSTEM
Symbol Value Unitsazi , i ∈{ 1,2,3,4,5,6,7} 740 kJ/hoCaz12, az13, az24 , az34, az45 , az46, az47 , az56 , az67 50 kJ/hoCast 12 kJ/kgoCasz 0.6 kJ/kgoCCst 837 kJ/oCCp 1.004 kJ/kgoCCv 0.717 kJ/kgoCr air 1.225 kg/m3
Czi , i ∈{ 1,2,3,4,5,6,7} 370 kJ/oCUi,max, i ∈{ 1,2,3,4,5,6,7} 3700 kg/hUst,max 27.36 ×104 kJ/hPmax 3.5DTmax 45 oCAw,i , i ∈{ 1,2,3,4,5,6,7} 120 m2
h 8.29 W/moCAd,12, Ad,13, Ad,24, Ad,34 2.60 m2
Ad,45, Ad,46, Ad,47, Ad,56, Ad,67 2.60 m2
Zon
e 4
,12dA
,13dA ,23dA
,24dA ,45dA
,34dA,56dA
,46dA
,67dA
,47dA
1ustu
2u 5u
4u
3u6u
7u
2Nu
Nu 1Nu

Simulation Results
Consider a seven‐zone HVAC system where the architectural arrangement of the seven zones is presented by the diagram
Zon
e 4
,12dA
,13dA ,23dA
,24dA ,45dA
,34dA,56dA
,46dA
,67dA
,47dA
1ustu
2u 5u
4u
3u6u
7u
2Nu
Nu 1Nu
Sensor fault
Sensor fault

Simulation Results
(1)s
(7)
(2) (3)
(4) (5) (6)

Simulation Results
s (1)
(2) (3)
(4)
(5)
(6)
(7)

Simulation Results
Consider a 83‐zone HVAC system where the architectural arrangement of the 83 zones is presented by the diagram
Papadopoulos M. P., Reppa V., Polycarpou M. M., Panayiotou C., “Distributed Diagnosis of Actuator and Sensor Faults in HVAC systems,” IFAC World Congress 2017.

Simulation Results
Multiple Faults occurring consecutively
Actuator fault
Sensor fault
(1) (1) (1)( 2 30%)a f nuf t
(3) (3) (3)( 2. 20%5) ref fs t yf

Simulation Results
Multiple Fault Scenario
Actuator fault in : Sensor fault in :
The parameters of each subsystem are:
It is assumed that the exogenous uncontrollable signals are constant
The modeling uncertainty in each subsystem
(1)(3)
(1) (1) (1)( 2 30%)a f nuf t (3) (3) (3)( 2. 20%5) ref fs t yf
5, ,
740, {1, , }, 50, 12, 0.6, 83700, 1.004,
0.717, 1.22, 370, 3700, {1, , }, 27.36 10 , 2.5,
45, 120, {1, , }, 8.29, 1.95, {1, , },
i ij
i
i ij
z z st sz st p
v air z i max st max
max w d i
a i N a a a C C
C C U i N U p
T A i N h A i N j
( ) ( )1 2 1 210 , 5 , 5 , 10 , {1, , }s o s o i o i od C d C d C d C i N
1( ) ( )
1
10% sin(0.1 ),
10% sin(0.1 )
s s
i i
r d t
r d t

Simulation Results
Have a look at the distributed monitoring agents located at:Zones { 1‐10, 81, 82, 83}
1‐10
83
81 82

Simulation Results

Simulation Results

Simulation Results
Local Fault Identification in Zone 1:

Simulation Results
Local Fault Identification in Zone 3:

Remarks on Fault Diagnosis for HVAC Systems
A distributed fault diagnosis (FD)methodology for isolating actuator and sensor faults in a multi‐zone HVAC system is presented.
The proposed architecture relies on the deployment of several distributed monitoring agents, which are allowed to exchange information.
Every agent is designed to detect the presence of faults, identify the type and infer the number and location (local or propagated faults).

Concluding Remarks
Monitoring and security of interconnected cyber-physical systems is a key area of growth
Fault diagnosis will play a key role in big data computing and Internet of Things (IoT)
Trend towards more sensors but cheaper sensors more susceptible to faults
Need for smart software to address faulty behavior of hardware

Acknowledgements
Colleagues and Graduate Students: Vasso Reppa, Christos Panayiotou, Thomas Parisini, Xiaodong Zhang, Panayiotis Papadopoulos, Demetris Eliades, Michalis Michaelides, Chris Keliris, Stelios Timotheou, Riccardo Ferrari.
This work is funded by the European Research Council Advanced Grant FAULT-ADAPTIVE (ERC-AdG-291508)

























![Interconnected Systems [Kompatibilitätsmodus]](https://img.pdfslide.us/doc/110x75/6241c6f30e4f7279512665fa/interconnected-systems-kompatibilittsmodus.jpg)


