Embed Size (px)
Citation preview

Fault Detection using Seismic Attributes and Visual SaliencyAbdulmajid Lawal1∗, Suhail Al-Dharrab1, Mohamed Deriche1, M. Amir Shafiq2, and Ghassan AlRegib2, Center forEnergy and Geo-Processing, 1Department of Electrical Engineering, King Fahd University of Petroleum and Minerals,Dhahran, Saudi Arabia, 2School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta,GA, USA.
SUMMARY
In order to detect accurately faults in seismic inline sections,we propose a new bottom-up saliency based approach usingdifferent seismic attributes such as coherence, curvature, dip,and gradient in parallel. Each attribute is calculated indepen-dently from the original seismic section. The saliency maps ofaforementioned attributes are computed using covariance ma-trix, which are later combined to form a consolidated saliencymap that highlights the seismic fault regions. The covariancematrix is used to characterize the seismic patches and captureslocal structures. By thresholding the variance maps and opti-mizing the binary points for curve fitting, the proposed work-flow yields good results for faults labeling.
INTRODUCTION
Seismic faults are common geological structures formed by thetransverse movement of rocks adjacent to each other that dis-rupts the horizon continuity. Their detection is crucial to indi-cate potential petroleum reservoirs and facilitate in bore-holeand well drilling. Seismic interpreters spend considerable ef-forts in locating faults after processing the seismic data. Due tothe massive nature of seismic data, adopting manual interpre-tation is extremely time consuming and labor intensive. There-fore, intelligent computer algorithms that can perform this taskeffectively and efficiently is an active area of research. Overthe last decade, many algorithms have been proposed for thedetection of horizons discontinuity based on seismic attributes,which can be further utilized to extract faults information.
Recently, a class of fault detection techniques that extract edgeinformation has been proposed by several authors. A largenumber of algorithms, which use digital image processing con-cepts, are applied successfully to automate the seismic inter-pretation and address the strikingly growing size of acquiredseismic data. Algorithms, which can automatically extract faultsfrom a seismic volume include ant tracking algorithm (Basir etal. (2013)), machine-learning-based algorithm (Zhang et al.(2014)), directional filtering-based algorithm (Hale (2009)),and Hough transform-based algorithms (AlBinHassan and Mar-furt, 2003; Wang and AlRegib, 2014; Jacquemin and Mal-let, 2005). Generally, these techniques are applied to seismicsections after enhancing the discontinuity in different regionsbased on seismic attributes. A threshold is applied to convertthe highlighted seismic section into an equivalent binary im-age, then an appropriate filter is applied before the final stageof labeling the fault lines/surfaces in 2D and 3D dataset, re-spectively.
As a great deal of research in computational cognitive science
suggests, a saliency model can reduce the sensory data infor-mation by focusing attention on perceptually salient regionsthat contain the most useful information in an image or video.A saliency model developed by combining various seismic at-tributes can effectively highlight the fault regions in a seismicvolume. Such saliency model enables the interpreter to iden-tify the fault regions with little or no effort.
In this paper, we propose a novel approach based on visualsaliency map to highlight the fault regions within seismic vol-umes. The saliency map of different attributes are computedseparately using the covariance matrix approach proposed byErdem (2013). The saliency maps of attributes are then com-bined to form a collective saliency map, which highlights thefault locations in a seismic image. By applying an adaptivethreshold to the variance-based saliency map, we precisely lo-cate the fault points. Furthermore, we utilize the variance-based coherence and curvature attributes to optimize and labelthe fault points in a seismic section.
PROPOSED METHOD
Figure 1 illustrates the block diagram of the proposed work-flow. In the first stage, we compute four different seismic at-tributes, which include the variance-based coherence by Mar-furt et al. (1998), curvature by Klein et al. (2008), dip byZhang and Bentley (2000), and gradient attribute by Chopra etal. (2014). In the second stage, we compute the saliency mapsof each attribute and combine them using empirical weightsdetermined according to the significance of seismic attributesin highlighting faults. This forms a consolidated saliency mapeffectively highlights the fault regions. In the last stage, welabel faults by thresholding the variance-based saliency map,and connecting the binary points. We optimize the fault la-bels using both the curvature and the coherence maps. Theestimated points are optimized to label the fault points by em-ploying curve fitting.
Figure 1: Block diagram of proposed workflow.
Page 1939© 2016 SEG SEG International Exposition and 86th Annual Meeting
Dow
nloa
ded
11/0
9/16
to 1
43.2
15.1
49.1
55. R
edis
trib
utio
n su
bjec
t to
SEG
lice
nse
or c
opyr
ight
; see
Ter
ms
of U
se a
t http
://lib
rary
.seg
.org
/

Fault detection using saliency
Fault Highlighting
Several seismic attributes such as coherence, curvature, gradi-ent, and dips can be exploited to make the fault regions promi-nent. Coherency measures the similarity between waveformsor traces. Geologically, a highly coherent seismic waveformindicates continuous lateral lithology. An abrupt change in thewaveform indicates faults or fractures in the sediments.
Coherency helps in accurately portraying stratigraphic placesand associated faults. Among the several types of coherencyavailable in the literature, in this paper, we will focus on thevariance-based coherence, V (x,y), because it highlights thefault region. Mathematically, V (x,y) is given as
V (x,y) = 1−
[ ∑rj=−r
(∑ri=−r s(x+ i,y+ j)
)2
(2r+1)∑r
i=−r∑r
j=−r s(x+ i,y+ j)2
],
(1)
where s(x,y) represents the intensity of seismic signal at point(x,y), where x and y represent the coordinates of cross line anddepth directions, respectively. (2r+ 1) is the size of analysiswindow, where r is the length of the window. Figure 2a illus-trates the variance-based coherence attribute of seismic inlinesection #256 obtained from the Netherlands offshore F3 blockin the North Sea.
Curvature attribute is a two dimensional property of a curveand describes how bent a curve is at a particular point on thecurve. Curvature attribute is a surface related attribute whichbrings out a particular structure such as fault, fractures, flex-ures, and folds. It is inevitable to observe these structures withartifacts in seismic sections. The curvature, K, which is thereciprocal of the radius of curvature, can be expressed as
K =d2y/
dx2
1+(
d2y/
dx2)2 . (2)
Using grid cell approach proposed by Lisle (1994), the calcula-tion of coefficients reduces to a series of arithmetic expressionsas
z(x,y) = ax2 +by2 + cxy+dx+ ey+ f , (3)
where a, b, c, d, e, and f are the coefficients of fitted curve inthe grid. Several curvature attributes (Lisle (1994)) can be ob-tained from the coefficient of equation (3) above. However, inour case, we select the most negative curvature as it is less vul-nerable to noise, and enhances the fault region. The expressionof the most negative curvature is given as
K− = (a+b)−√
(a−b)2 + c2. (4)
The curvature attribute of seismic inline section #256 is shownin Figure 2b.
The dip attribute can highlight subtle faults that have throwsas well as stratigraphic features, which manifests it throughchanges. There are several ways of computing the dip and
azimuth from seismic data, which include aligning the phasederived from complex-trace analysis, discretely scanning forthe most coherent reflector and cross correlating the gradient ofdata and forming a gradient structure tensor. The first method,which computes dips using complex analysis will be followedin this paper. See (Barnes ,2000, 2007; Taner, 1979; Zhang andBentley, 2000) for further details on complex trace analysis.
To calculate the dip, we first calculate the instantaneous wavenumbers in the cross line and depth directions, Kx(x,y) andKy(x,y), respectively, as
Kx (x,y) =u duH
dx −uH dudx
(u)2 +(uH)2 , (5)
Ky (x,y) =u duH
dy −uH dudy
(u)2 +(uH)2 , (6)
where u is the input data and the superscript H denotes theHilbert operator. The instantaneous dip, θ , is then given by
θ = tan−1(
Kx
Ky
). (7)
Figure 2c shows the dip attribute of the seismic inline section#256.
The gradient attribute highlights the edges by computing thegradient in x-direction and in y-directions, respectively. How-ever, we will consider the gradient in the x-direction becauseit enhances the fault region better. The following expressionshows the gradient computation in x-direction.
du(x,y)dx
=u(x+∆x,y)−u(x,y)
∆x. (8)
The gradient of the seismic inline section #256 is shown inFigure 2d.
Figure 2: (a) The variance-based coherence attribute, (b) Thecurvature attribute, (c) Dip attribute, and (d) The gradient at-tribute.
Page 1940© 2016 SEG SEG International Exposition and 86th Annual Meeting
Dow
nloa
ded
11/0
9/16
to 1
43.2
15.1
49.1
55. R
edis
trib
utio
n su
bjec
t to
SEG
lice
nse
or c
opyr
ight
; see
Ter
ms
of U
se a
t http
://lib
rary
.seg
.org
/

Fault detection using saliency
Saliency Based on Region Covariance
The covariance matrix has traditionally been used to repre-sent the auto and cross correlation among a set of variableswhile a diagonal element represents variances of the variables(features), and off diagonal elements represent the correlationamong different pairs of variables (Forstner and Moonen, 1999).Unlike the conventional computation of saliency, which as-sumes the responses of linear filter are independent of eachother and combine them linearly, incorporating a second orderstatistics within a single descriptor encodes the local structurewell, and provides robustness and high discriminative poweras shown in Erdem and Erdem (2013).
Let Ri denotes the region under consideration whose immedi-ate context is defined by the region {R j} with a radius r. Thesaliency of Ri is defined as the weighted average of dissimilar-ity between Ri to the m most similar region around it. Moreformally, the saliency of region Ri is given by
S (Ri) =1m
m∑j=1
d(
Ri,R j), (9)
where the m most similar regions to Ri are found according tothe dissimilarity measure, d(Ri,R j), defined as
d(
Ri,R j)=
ρ(Ci,C j)
1+ ||xi− x j||, (10)
with Ci and C j denoting the covariance matrices, and xi andx j being the image coordinates of the centre of region Ri andR j , respectively. In determining the distinctiveness of a region,weighting covariance distances by inverse spatial distance de-creases the influences of visually similar nearby region andintroduces a grouping like effect.
To obtain a consolidated saliency map, we initially rescale theinput attribute map to a 512× 512 region, the region size setis {16,32,64}, r = 3, σ is chosen as 0.02∗512, and the num-ber of most similar neighbors is selected as 1/10. The saliencymaps of gradient, curvature, dip, and variance-based coherenceattributes are shown in Figures 3a, 3b, 3c, and 3d, respectively,which shows that the saliency maps of gradient and the cur-vature attributes highlight the fault region precisely, while thedip and coherence attributes highlight other regions surround-ing the fault as well. We linearly combine those saliency maps.The saliency maps of curvature and gradient show better per-formance and are given more weight compared to the dip andcoherence maps.
Fault Labeling
After obtaining the consolidated saliency map, the interpreterhas a clear idea of where the fault is likely to be located. Next,to label the fault line, we first threshold the variance map, andthen use geological constraints as in Wang and AlRegib (2014)to remove false features. The results of thresholding saliencymaps in seismic inline sections #256 and #272 are shown inFigures 4a and 4b, respectively. These binary points are thenconnected to form a straight line. However, the line is notaccurate enough to illustrate the fault labeling. In order to im-prove the accuracy, we employ both coherency and curvaturemaps to re-label the faults because variance-based coherency
Figure 3: Saliency map of (a) Gradient attribute, (b) Curvatureattribute, (c) Dip attribute, and (d) Variance-based coherence.
enhances prominent faults while the curvature enhances subtlefaults.
Figure 4: (a) Threshold map of inline #256, (b) Threshold mapof inline #272, with geological constraints.
Assuming that the initial connected fault lines have coordi-nates at point i, Pc(i) = (xc(i),zc(i)), i = 1,2, ..., where xc andzc are the coordinates of the crossline and inline directions,respectively at point i. This coordinate is used with a partic-ular radius rs = 2 to search a group of points in the variancemap along the cross line to obtain a point that corresponds toa local maximum along the points xm(i). We also use samecoordinates to search for a group of points that correspond tothe local maximum of curvature map, xn(i). We obtain a newset of coordinate, and it is averaged to obtain xw(i) to improveaccuracy
xm(i) = argmaxx∈[−rs+xc(i), xc(i)+rs]
V (x,zc(i)), (11)
xn(i) = argmaxx∈[−rs+xc(i), xc(i)+rs]
K−(x,zc(i)), (12)
xw (i) =xm (i)+ xn (i)
2. (13)
Now, each crossline has two probable candidate points; onexc(i), and second xw(i). The next step is to decide the faultposition between the interval [xc(i),xw(i)]. We use the follow-ing objective function similar to one proposed in Wang andAlRegib (2014) to estimate the fault position.
x = argminx
λ1||x− xc||22 +λ2||x− xw||22. (14)
Page 1941© 2016 SEG SEG International Exposition and 86th Annual Meeting
Dow
nloa
ded
11/0
9/16
to 1
43.2
15.1
49.1
55. R
edis
trib
utio
n su
bjec
t to
SEG
lice
nse
or c
opyr
ight
; see
Ter
ms
of U
se a
t http
://lib
rary
.seg
.org
/

Fault detection using saliency
The binary coordinates of optimization points are used to fita line in the fault regions, which indicate the fault line in theseismic inline sections.
EXPERIMENTAL RESULTS
The dataset used in this paper is obtained from the Netherlandsoffshore, F3 block in the North Sea. We focused mainly onseismic inline sections with clear and visible fault lines such asin inline ranging from #200 to #300, cross line ranging from#700 to #1200, and the time section ranging from 400ms to1100ms.
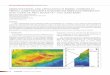
The fault regions are highlighted by considering multiple at-tributes with different weights. After we obtain saliency mapsas shown in Figures 3a-3d, we combine the saliency map by as-signing more weight to the gradient and curvature based saliencymaps, and less weight to the curvature and dip saliency mapsas shown in Figure 5a. The resultant saliency map is then over-laid on the original seismic section to highlight the fault regionas shown in Figure 5b. The saliency map reduces the visualsearch area for an interpreter and highlight the probable loca-tion of the fault.
(a)
(b)
Figure 5: (a) The combination of all saliency maps, (b) Thesaliency map overlaid on the seismic inline section #256.
Figures 6a and 6b show the detected faults labeled in greencolor line on the seismic inline sections #256 and #272, respec-tively, with the ground truth manually labelled in red. Sub-jectively, it can be observed that the output of the proposedworkflow yields fault labels very close to the ground truth, in-
Figure 6: (a) Seismic inline section #256 (b) Seismic inlinesection #272. Green: Output of the proposed workflow, Red:Ground Truth.
dicating the efficacy of the proposed workflow.
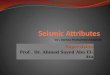
To objectively evaluate the similarity between the detected faultlabel and the ground truth, we use the Frechet-distance-basedsimilarity index, SalSIM, proposed by Wang et al. (2015). TheSalSIM index varies between 0 and 1, indicating the minimumand maximum similarity between the two fault labels, respec-tively. The SalSIM indices of ten different seismic inline sec-tions are shown in Figure 7, which illustrates the effectivenessof the proposed workflow for fault labeling.
Seismic inline sections256 258 260 262 264 266 268 270 272 274
SalS
IM in
dice
s
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Figure 7: SalSIM indices of ten different seismic inline sec-tions.
CONCLUSION
In this paper, we calculated various seismic attributes and com-puted the saliency maps for each. The saliency maps were thencombined using empirically selected weights to yield a consol-idated saliency map highlighting the fault regions within seis-mic sections. Combined saliency map with carefully selectedweights highlights the fault regions better than the individualmaps. Fault labeling was performed by utilizing both curvaturemap and the variance based coherence map. The experimentalresults shown in this paper illustrate that the proposed work-flow highlights the fault regions and detected fault lines veryprecisely.
ACKNOWLEDGMENTS
This work is supported by the Center for Energy and Geo-Processing (CeGP) at Georgia Tech and King Fahd Universityof Petroleum and Minerals (KFUPM).
Page 1942© 2016 SEG SEG International Exposition and 86th Annual Meeting
Dow
nloa
ded
11/0
9/16
to 1
43.2
15.1
49.1
55. R
edis
trib
utio
n su
bjec
t to
SEG
lice
nse
or c
opyr
ight
; see
Ter
ms
of U
se a
t http
://lib
rary
.seg
.org
/

EDITED REFERENCES Note: This reference list is a copyedited version of the reference list submitted by the author. Reference lists for the 2016
SEG Technical Program Expanded Abstracts have been copyedited so that references provided with the online metadata for each paper will achieve a high degree of linking to cited sources that appear on the Web.
REFERENCES AlBinHassan, N. M., and K. J. Marfurt, 2003, Fault detection using Hough transforms: 83rd
Annual International Meeting, SEG, Expanded Abstracts, 1719-1721, http://dx.doi.org/10.1190/1.1817639.
Barnes, A. E., 2000, Weighted average seismic attributes: Geophysics, 65, 275–285, http://dx.doi.org/10.1190/1.1444718.
Barnes, A. E., 2007, A Tutorial on complex seismic trace analysis: Geophysics, 72, no. 6, W33–W39, http://dx.doi.org/10.1190/1.2785048.
Basir, H. M., A. Javaherian, and M. T. Yaraki, 2013, Multi-attribute ant-tracking and neural network for fault detection: A case study of an Iranian oilfield: Journal of Geophysics and Engineering 10, 015009, http://dx.doi.org/10.1088/1742-2132/10/1/015009.
Erdem, E., and A., Erdem, 2013, Visual saliency estimation by nonlinearly integrating features using region covariances: Journal of vision, 13, 1–20, http://dx.doi.org/10.1167/13.4.11.
Förstner, W., and B. Moonen, 1999, A metric for covariance matrices, in Quo vadis geodesia: Universität Stuttgart - Geodätisches Institut, 113–128.
Hale, D., 2009, Structure-oriented smoothing and semblance: CWP Report, CWP-635. Jacquemin, P., and J.-L. Mallet, 2005, Automatic fault extraction using double Hough transform:
75th Annual International Meeting, SEG, Expanded Abstracts, 24, 755–758, http://dx.doi.org/10.1190/1.2144436.
Lisle, R. J., 1994, Detection of zones of abnormal strains in structures using Gaussian curvature analysis: AAPG Bulletin, 78, 1811–1819, http://dx.doi.org/10.1306/a25ff305-171b-11d7-8645000102c1865d.
Marfurt, K. J., R. L. Kirlin, S. L. Farmer, and M. S. Bahorich, 1998, 3D seismic attributes using a semblance-based coherency algorithm: Geophysics, 63, 1150–1165, http://dx.doi.org/10.1190/1.1444415.
Taner, M. T., F. Koehler, and R. E. Sheriff, 1979, Complex seismic trace analysis: Geophysics, 44, 1041–1063, http://dx.doi.org/10.1190/1.1440994.
Wang, Z., and G. AlRegib, 2014, Fault detection in seismic datasets using Hough transform: International Conference on Acoustics, Speech and Signal Processing (ICASSP), IEEE.
Wang, Z., T. Hegazy, Z. Long, and G. AlRegib, 2015, Noise-robust detection and tracking of salt domes in post migrated volumes using texture, tensors, and subspace learning: Geophysics, 80, no. 6, WD101–WD116, http://dx.doi.org/10.1190/geo2015-0116.1.
Zhang, J., and L. R. Bentley, 2000, Complex seismic trace analysis and its application to time- lapse seismic surveys: CREWES Research Report, 12.
Page 1943© 2016 SEG SEG International Exposition and 86th Annual Meeting
Dow
nloa
ded
11/0
9/16
to 1
43.2
15.1
49.1
55. R
edis
trib
utio
n su
bjec
t to
SEG
lice
nse
or c
opyr
ight
; see
Ter
ms
of U
se a
t http
://lib
rary
.seg
.org
/