Embed Size (px)
Citation preview

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
False Discovery Control in Spatial Multiple Testing
W Sun1, B Reich2, T Cai3, M Guindani4, and A. Schwartzman2
WNAR, June, 2012
1 University of Southern California2 North Carolina State University3 University of Pennsylvania4 MD Anderson

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
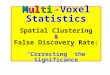
Spatial modeling of time trends in tropospheric ozone
The EPA uses a monitoring network to regulate ozone.
Our objective it to identify areas with changing ozone.
Other examples of spatial multiple testing: climate change,disease monitoring, neuroimaging, etc.
−90 −85 −80 −75 −70
2530
3540
45
Longitude
Latitu
de
−3
−2
−1
0
1
2
3
−90 −85 −80 −75 −70
2530
3540
45
Longitude
Latitu
de
−4
−2
0
2
(a) First stage estimates, β̂(s) (b) First stage z-scores, z(s) = β̂(s)/w(s)

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
New issues in spatial multiple testing
One only observes data points at a discrete subset of thelocations but needs to make inference everywhere in thespatial domain.
A finite approximation strategy is needed for inference in acontinuous spatial domain – otherwise an uncountable numberof tests needs to be conducted, which is impossible in practice.
It is desirable to aggregate information from nearby locationsto make cluster-wise inference, and to incorporateimportant spatial variables in the decision-making process.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Gaussian random field model
Let XXX = {X (s) : s ∈ S} be a random field on a spatialdomain S :
X (s) = μ(s) + ε(s), (1)
where μ(s) is the unobserved random process and ε(s) is thenoise process.
An important special case is the Gaussian random field modelwhere the signals and errors are Gaussian processes withmeans μ̄ and 0, and covariance functions ρ1 and ρ2,respectively.
Let Θ denote the collection of all parameters in model (1).

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Notation
Hypotheses
H0(s) : μ(s) ∈ A versus H1(s) : μ(s) ∈ Ac
A is the indifference region, e.g. A = {μ : μ ≤ μ0}True states
θ(s) = 0 if H0(s) and θ(s) = 1 if H1(s)
Null area: S0 = {s ∈ S : θ(s) = 0}Non-null area S1 = {s ∈ S : θ(s) = 1}
Decisions
δ(s) = 1 if reject and δ(s) = 0 otherwise
Rejection region, R = {s ∈ S : δ(s) = 1}Error regions
False positive area: SFP = {s ∈ S : θ(s) = 0, δ(s) = 1}False negative area: SFN = {s ∈ S : θ(s) = 1, δ(s) = 0}

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
False discovery measures
The key quantity to control is the false discovery proportion,
FDP =ν(SFP)
ν(R)I{ν(R) > s0},
where s0 is a small positive value.
FDR: Typically, false discovery rate is controlled so thatFDR = E (FDP) < α.
FDX: We might also want to be reasonably confident theFDP is less than some value, say τ ∈ (0, 1). Therefore, wealso consider the false discovery exceedance,FDXτ = P(FDP > τ) < α.
MDR: The power of a multiple testing procedure issummarized by the missed discovery rate, MDR = E{ν(SFN)}.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Compound decision theory for spatial multiple testing
Under mild conditions, the multiple testing problem isequivalent to a weighted classification problem
L(θθθ,δδδ) = λν(SFP) + ν(SFN).
There is a one-to-one relationship between λ and α.
The optimal rule is to reject if the posterior probability of thenull is smaller than a threshold t, i.e., δ(s) = I [TOR(s) < t],where TOR(s) = PΘ{θ(s) = 0|XXX}.
The threshold t is taken to be as large as possible (to increasepower) while still maintaining FDR(t) ≤ α.
FDR(t) is unknown and must be approximated.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Discrete approximation
This problem boils down to estimating FDR(t), which isdifficult because it is an integral over potentiallyinfinitely-many tests (spatial locations).
Let ∪mi=1Si be a fine partition of S . Take a point si from each
Si .
Compute the probability of the null, TOR(si ).
Let {T (i)OR : i = 1, · · · ,m} be the ordered oracle statistics and
S(i) the region corresponding to T(i)OR .

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
FDR control
Procedure
Define Rj = ∪ji=1S(i) and
r = max
{j : ν(Rj)
−1j∑
i=1
T(i)ORν(S(i)) ≤ α
}.
The rejection area is given by R = ∪ri=1S(i).
Therefore, we assume the decision is constant within pixels andapproximate the FDR as the sum of posterior probabilities of thenull over the pixels in the rejection region.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
FDX control
Similar to FDR control, we control FDX by:
Procedure
DefineFDXm
τ,j = PΘ
(I{ν(Rj )>0}
ν(Rj )
∑si∈Rm
j{1− θ(si)}ν(Si ) > τ − ε0|XXX
)and r = max{j : FDXm
τ,j ≤ α}.
Then the rejection region is given by R = ∪ri=1S(i).

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
The decision process on a continuous spatial domain can bedescribed, within a small margin of error, by a finite number ofdecisions on a grid of pixels.
Theorem
Under conditions on random field and partition
(a) The FDR level of the FDR procedure satisfiesFDR ≤ α+ o(1) when m → ∞.
(b) The FDX level of the FDX procedure at tolerancelevel τ satisfies FDX ≤ α+ o(1) when m → ∞.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Computational Algorithms
The numerical methods for model fitting and parameterestimation in spatial models have been extensively studied in aBayesian computational framework.
Suppose the MCMC samples are {μμμb : b = 1, · · · ,B}, whereμμμb = [μb(s1), · · · , μb(sm)] is a sample b.
Let θb(si ) = I [μb(si) ∈ Ac ].
TOR(si ) can be estimated by
T̂OR(si ) =1
B
B∑b=1
[1− θb(si)].

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Simulation setting
Generate data from the model x(s) = μ(s) + ε(s).
Both the signals and errors are generated as Gaussianprocesses.
The signal process μ has mean μ̄ and exponential covarianceCov[μ(s), μ(s ′)] = σ2
μ exp[−||s − s ′||/ρμ].
The error process ε has mean zero and covarianceCov[ε(s), ε(s ′)] = (1− r)I (s = s ′) + r exp[−||s − s ′||/ρε].
Choose n = 1000, r = 0.9, μ̄ = −1, and σμ = 2. Theexpected proportion of positive observations is 0.31.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Models
We compare seven methods:
Non-spatial approach of Benjamini and Hochberg FDR (BH)
Non-spatial approach of Genovese and Wasserman (GW)
Spatial approach of Pacifico et al (PGVW) FDR and FDX
Oracle (our approach with hyperparameters fixed at truevalues) FDR and FDX
MC (our approach with hyperparameters estimated usingMCMC) FDR and FDX
Uninformative priors:
μ̄ ∼ N(0, 1002)
σ−2μ ∼ Gamma(0.1, 0.1)
r , ρμ, ρε ∼ Uniform(0, 1).

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
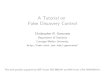
False discovery rate (target is α = 0.1) by ρμ
0.00 0.05 0.10 0.15 0.20
0.00
0.05
0.10
0.15
0.20
Spatial range
Mea
n FD
PBHGWOracle FDROracle FDX
MC FDRMC FDXPGVW FDRPGVW FDX

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Distribution of FDP by ρμ
0.00 0.05 0.10 0.15 0.20
0.00
0.05
0.10
0.15
0.20
0.25
Spatial range
Dist
ribut
ion
of F
DPOracle FDROracle FDXMC FDRMC FDX

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Missed discovery rate by ρμ
0.00 0.05 0.10 0.15 0.20
0.0
0.2
0.4
0.6
0.8
1.0
Spatial range
MDR

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Summary of simulation
The oracle FDR procedure controls the FDR nearly perfectly.
The MC FDR procedure with uninformative priors has goodFDR control.
FDX methods are more conservative than the FDR methods.
The BH, GW, and PGVW are very conservative.
MDR levels of the oracle and MC methods are much lower.

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
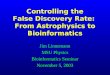
Ozone data analysis
−0.8
−0.6
−0.4
−0.2
0.0
0.2
0.0
0.2
0.4
0.6
0.8
1.0
(a) Posterior mean of μ(s) (b) Posterior prob μ(s) < −0.1

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Rejection region (black) using the FDX rule
0.0
0.2
0.4
0.6
0.8
1.0

Introduction False discovery measures False discovery controlling procedures Computation & Numerical Results
Summary
Convention (e.g., Benjamini and Yekutieli (2001) and Sarkar(2002)) is that it is safe to apply standard methods as if thetests were independent.
While standard methods control FDR, incorporating theunderlying dependency structure can dramatically improve thepower.
A continuous decision process can be described, within a smallmargin of error, by a finite number of decisions on a grid ofpixels.
FDR and FDX controlling problems can be solved in a unifiedtheoretical and computational framework.
We have also extended this to deal with spatial clusters.