Embed Size (px)
Citation preview

Honors Physics Review Notes
Fall 2008
Tom StrongScience Department
Mt Lebanon High [email protected]
The most recent version of this can be found at http://www.tomstrong.org/physics/
Chapter 1 — The Science of Physics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Chapter 2 — Motion in One Dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Chapter 3 — Two-Dimensional Motion and Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Chapter 4 — Forces and the Laws of Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Chapter 5 — Work and Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Chapter 6 — Momentum and Collisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Chapter 7 — Rotational Motion and the Law of Gravity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Chapter 8 — Rotational Equilibrium and Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Variables and Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Mathematics Review for Physics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Physics Using Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Data Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Midterm Exam Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Semester Exam Equation Sheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Mixed Review Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Mixed Review Answers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33

ii
These notes are meant to be a summary of important points covered in the Honors Physics class at Mt. Lebanon HighSchool. They are not meant to be a replacement for your own notes that you take in class, nor are they a replacement foryour textbook. Much of the material in here is taken from the textbook without specifically acknowledging each case, inparticular the organization and overall structure exactly match the 2002 edition of Holt Physics by Serway and Faughnand many of the expressions of the ideas come from there as well.
The mixed review exercises were taken from the supplementary materials provided with the textbook. They are arepresentative sampling of the type of mathematical problems you may see on the final exam for the course. There willalso be conceptual questions on the exam that may not be covered by the exercises included here. These exercises areprovided to help you to review material that has not been seen in some time, they are not meant to be your only resourcefor studying. Exercises are included from chapters 1–8, 12–17, and 19–22.
The answers at the end of the review are taken from the textbook, often without verifying that they are correct. Usethem to help you to solve the problems but do not accept them as correct without verifying them yourself.
This is a work in progress and will be changing and expanding over time. I have attempted to verify the correctnessof the information presented here, but the final responsibility there is yours. Before relying on the information in thesenotes please verify it against other sources.
Honors Physics 2008–2009 Mr. Strong

1
Chapter 1 — The Science of Physics
1.1 What is Physics?Some major areas of Physics:Mechanics — motion and its causes — falling objects,
friction, weightThermodynamics — heat and temperature — melting
and freezing processes, engines, refrigeratorsVibrations and Waves — specific types of repeating
motions — springs, pendulums, soundOptics — light — mirrors, lenses, colorElectromagnetism — electricity, magnetism, and light
— electrical charge, circuitry, magnetsRelativity — particles moving at very high speeds — par-
ticle accelerators, particle collisions, nuclear energyQuantum Mechanics — behavior of sub-microscopic
particles — the atom and its parts
The steps of the Scientific Method1. Make observations and collect data that lead to a
question2. Formulate and objectively test hypotheses by experi-
ments (sometimes listed as 2 steps)3. Interpret results and revise the hypotheses if neces-
sary4. State conclusions in a form that can be evaluated by
others
1.2 Measurements in ExperimentsMeasurementsThere are 7 basic dimensions in SI (Systeme International),the 3 we will use most often are:
• Length — meter (m) — was 1/10,000,000 of the dis-tance from the equator to the North Pole — now thedistance traveled by light in 3.3× 10−9 s
• Mass — kilogram (kg) — was the mass of 0.001 cubicmeters of water, now the mass of a specific platinum-iridium cylinder
• Time — second (s) — was a fraction of a mean so-lar day, now 9,162,631,700 times the period of a radiowave emitted by a Cesium-133 atom
Common SI Prefixes
Prefix Multiple Abbrev.
nano- 10−9 n deci- 10−1 dmicro- 10−6 µ kilo- 103 kmilli- 10−3 m mega- 106 Mcenti- 10−2 c giga- 109 G
Accuracy vs. Precision
• Accuracy describes how close a measured value is tothe true value of the quantity being measured
Problems with accuracy are due to error. To avoiderror:
– Take repeated measurements to be certain thatthey are consistent (avoid human error)
– Take each measurement in the same way (avoidmethod error)
– Be sure to use measuring equipment in goodworking order (avoid instrument error)
• Precision refers to the degree of exactness with whicha measurement is made and stated.
– 1.325 m is more precise than 1.3 m
– lack of precision is usually a result of the limi-tations of the measuring instrument, not humanerror or lack of calibration
– You can estimate where divisions would fall be-tween the marked divisions to increase the pre-cision of the measurement
1.3 The Language of Physics
There are many symbols that will be used in this class, someof the more common will be:
Symbol Meaning
∆x Change in xxi, xf Initial, final values of x∑
F Sum of all F
Dimensional analysis provides a way of checking tosee if an equation has been set up correctly. If the units re-sulting from the calculation are not those that are expectedthen it’s very unlikely that the numbers will be correct ei-ther. Order of magnitude estimates provide a quickway to evaluate the appropriateness of an answer — if theestimate doesn’t match the answer then there’s an errorsomewhere.
Honors Physics 2008–2009 Mr. Strong

2
Counting Significant Figures in a Number
Rule Example
All counted numbers have an infinite numberof significant figures
10 items, 3 measurements
All mathematical constants have an infinitenumber of significant figures
1/2, π, e
All nonzero digits are significant 42 has two significant figures; 5.236 has four
Always count zeros between nonzero digits 20.08 has four significant figures; 0.00100409 has six
Never count leading zeros 042 and 0.042 both have two significant figures
Only count trailing zeros if the number con-tains a decimal point
4200 and 420000 both have two significant figures; 420.has three; 420.00 has five
For numbers in scientific notation apply theabove rules to the mantissa (ignore the expo-nent)
4.2010× 1028 has five significant figures
Counting Significant Figures in a Calculation
Rule Example
When adding or subtracting numbers, find the number which is knownto the fewest decimal places, then round the result to that decimalplace.
21.398 + 405 − 2.9 = 423 (3significant figures, roundedto the ones position)
When multiplying or dividing numbers, find the number with the fewestsignificant figures, then round the result to that many significant fig-ures.
0.049623 × 32.0/478.8 =0.00332 (3 significant figures)
When raising a number to some power count the number’s significantfigures, then round the result to that many significant figures.
5.82 = 34 (2 significantfigures)
Mathematical constants do not influence the precision of any compu-tation.
2× π × 4.00 = 25.1 (3 signif-icant figures)
In order to avoid introducing errors during multi-step calculations, keepextra significant figures for intermediate results then round properlywhen you reach the final result.
Rules for Rounding
Rule Example
If the hundredths digit is 0 through 4 drop it and all following digits. 1.334 becomes 1.3
If the hundredths digit is 6 though 9 round the tenths digit up to thenext higher value.
1.374 becomes 1.4
If the hundredths digit is a 5 followed by other non-zero digits thenround the tenths digit up to the next higher value.
1.351 becomes 1.4
If the hundredths digit is a 5 not followed by any non-zero digits thenif the tenths digit is even round down, if it is odd then round up.
1.350 becomes 1.4, 1.250 be-comes 1.2
(assume that the result was to be rounded to the nearest 0.1, for other precisions adjust accordingly)
Honors Physics 2008–2009 Mr. Strong

3
Chapter 2 — Motion in One Dimension
2.1 Displacement and Velocity
The displacement of an object is the straight line (vector)drawn from the object’s initial position to its new position.Displacement is independent of the path taken and is notnecessarily the same as the distance traveled. Mathemati-cally, displacement is:
∆x = xf − xi
The average velocity, equal to the constant velocitynecessary to cover the given displacement in a certain timeinterval, is the displacement divided by the time intervalduring which the displacement occurred, measured in m
s
vavg =∆x∆t
=xf − xi
tf − ti
The instantaneous velocity of an object is equivalentto the slope of a tangent line to a graph of x vs. t at thetime of interest.
The area under a graph of instantaneous velocity vs.time (v vs. t) is the displacement of the object during thattime interval.
2.2 Acceleration
The average acceleration of an object is the rate ofchange of its velocity, measured in m
s2 . Mathematically, itis:
aavg =∆v∆t
=vf − vi
tf − ti
Like velocity, acceleration has both magnitude and di-rection. The speed of an object can increase or decreasewith either positive or negative acceleration, depending onthe direction of the velocity — negative acceleration doesnot always mean decrease in speed.
The instantaneous acceleration of an object is equiv-alent to the slope of a tangent line to the v vs. t graph atthe time of interest, while the area under a graph of instan-taneous acceleration vs. time (a vs. t) is the velocity ofthe object. In this class acceleration will almost always beconstant in any problem.
Displacement and velocity with constant uniform accel-eration can be expressed mathematically as any of:
vf = vi + a∆t
∆x = vi∆t+12a∆t2
∆x =12(vi + vf )∆t
v2f = v2
i + 2a∆x
2.3 Falling ObjectsIn the absence of air resistance all objects dropped near thesurface of a planet fall with effectively the same constantacceleration — called free fall. That acceleration is alwaysdirected downward, so in the customary frame of referenceit is negative, so:
ag = g = −9.81ms2
Honors Physics 2008–2009 Mr. Strong

4
Chapter 3 — Two-Dimensional Motion and Vectors
3.1 Introduction to VectorsVectors can be added graphically.
Vectors can be added in any order:
~V1 + ~V2 = ~V2 + ~V1
To subtract a vector you add its opposite:
~V1 − ~V2 = ~V1 + (−~V2)
Multiplying a vector by a scalar results in a vector insame direction as the original vector with a magnitude equalto the original magnitude multiplied by the scalar.
3.2 Vector OperationsTo add two perpendicular vectors use the Pythagorean The-orem to find the resultant magnitude and the inverse of thetangent function to find the direction: Vr =
√V 2
x + V 2y and
the direction of Vr, θr, is tan−1 Vy
Vx
Just as 2 perpendicular vectors can be added, any vectorcan be broken into two perpendicular component vectors:~V = ~Vx + ~Vy where ~Vx = V cos θı and ~Vy = V sin θ;
Two vectors with the same direction can be added byadding their magnitudes, the resultant vector will have thesame direction as the vectors that were added.
Any two (or more) vectors can be added by first decom-posing them into component vectors, adding all of the x andy components together, and then adding the two remainingperpendicular vectors as described above.
3.3 Projectile MotionThe equations of motion introduced in chapter 2 are ac-tually vector equations. Once the new symbol for displace-ment, ~d = ∆xı+∆y has been introduced the most commonones can be rewritten as
~d = ~vi∆t+12~a∆t2
~vf = ~vi + ~a∆t
Since motion in each direction is independent of motion inthe other, objects moving in two dimensions are easier toanalyze if each dimension is considered separately.
~dx = ~vxi∆t+12~ax∆t2
~dy = ~vyi∆t+12~ay∆t2
In the specific case of projectile motion there is noacceleration in the horizontal (ı) direction (~ax = 0) andthe acceleration in the vertical () direction is constant(~ay = ~ag = ~g = −9.81 m
s2 ). While ~vy will change over time,~vx remains constant. Neglecting air resistance, the path fol-lowed by an object in projectile motion is a parabola. Thefollowing equations use these simplifications to describe themotion of a projectile launched with speed ~vi and directionθ up from horizontal:
~vx = vi cos θı = constant
~vyi = vi sin θ
~dx = vi cos θ∆tı
~dy = vi sin θ∆t+12~g∆t2
To solve a projectile motion problem use one part of theproblem to find ∆t, then once you know ∆t you can usethat to solve the rest of the problem. In almost every casethis will involve using the vertical part of the problem tofind ∆t which will then let you solve the horizontal partbut there may be some problems where the opposite ap-proach will be necessary. For the special case of a projectilelaunched on a level surface the range can be found with
dx =v2 sin 2θag
Honors Physics 2008–2009 Mr. Strong

5
Chapter 4 — Forces and the Laws of Motion
4.1 Changes in MotionForce causes change in velocity. It can cause a station-ary object to move or a moving object to stop or otherwisechange its motion.
The unit of force is the newton (N), equivalent to kg·ms2 ,
which is defined as the amount of force that, when actingon a 1 kg mass, produces an acceleration of 1m
s2 .Contact forces act between any objects that are in
physical contact with each other, while field forces actover a distance.
A force diagram is a diagram showing all of the forcesacting on the objects in a system.
A free-body diagram is a diagram showing all of theforces acting on a single object isolated from its surround-ings.
4.2 Newton’s First LawNewton’s first law states that
An object at rest remains at rest, and an ob-ject in motion continues in motion with constantvelocity (that is, constant speed in a straightline) unless the object experiences a net exter-nal force.
This tendency of an object to not accelerate is calledinertia. Another way of stating the first law is that if thenet external force on an object is zero, then the accelerationof that object is also zero. Mathematically this is∑
~F = 0 −→ ~a = 0
An object experiencing no net external force is said tobe in equilibrium, if it is also at rest then it is in staticequilibrium
4.3 Newton’s Second and Third LawsNewton’s second law states that
The acceleration of an object is directly pro-portional to the net external force acting on theobject and inversely proportional to the object’smass.
Mathematically this can be stated as:∑~F = m~a
Which in the case of no net external force (∑ ~F = 0) also
illustrates the first law:∑~F = 0 −→ m~a = 0 −→ ~a = 0
Newton’s third law states that
If two objects interact, the magnitude of theforce exerted on object 1 by object 2 is equal tothe magnitude of the force simultaneously ex-erted on object 2 by object 1, and these twoforces are opposite in direction.
Mathematically, this can be stated as:
~F1,2 = −~F2,1
The two equal but opposite forces form an action-reactionpair.
4.4 Everyday Forces
The weight of an object (~Fg) is the gravitational force ex-erted on the object by the Earth. Mathematically:
~Fg = m~g where ~g = −9.81ms2j
The normal force (~Fn) is the force exerted on an objectby the surface upon which the object rests. This force isalways perpendicular to the surface at the point of contact.
The force of static friction (~Fs) is the force that op-poses motion before an object begins to move, it will pre-vent motion so long as it has a magnitude greater than theapplied force in the direction of motion. The maximummagnitude of the force of static friction is the product ofthe magnitude of the normal force times the coefficientof static friction (µs) and its direction is opposite thedirection of motion:
µs =Fs,max
Fn−→ Fs,max = µsFn
The force of kinetic friction (~Fk) is the force that op-poses the motion of an object that is sliding against a sur-face. The magnitude of the force of kinetic friction is theproduct of the magnitude of the normal force times thecoefficient of kinetic friction (µk) and its direction isopposite the direction of motion:
µk =Fk
Fn−→ Fk = µkFn
The force of friction between two solid objects dependsonly on the normal force and the coefficient of friction, itis independent of the the surface area in contact betweenthem.
For an object at rest with a force applied to it the fric-tional force will vary as the applied force is increased.
Honors Physics 2008–2009 Mr. Strong

6
Fapp
Ffriction
µkFn
µsFn
µsFnstatic kinetic
Fs = Fapp
Fk = µkFn
Air resistance (~FR) is the force that opposes the mo-tion of an object though a fluid. For small speeds FR ∝ vwhile for large speeds FR ∝ v2. (Exactly what is small orlarge depends on things that are outside the scope of thisclass.) Air resistance is what will cause falling objects toeventually reach a terminal speed where FR = Fg.
Solving Friction Problems
When solving friction problems start by drawing a diagramof the system being sure to include the gravitational force(Fg), normal force (Fn), frictional force (Fk, Fs, or Fs,max)and any applied force(s).
Determine an appropriate frame of reference, rotatingthe x and y coordinate axes if that is convenient for theproblem (such as an object on an inclined plane). Resolveany vectors not lying along the coordinate axes into com-ponents.
Use Newton’s second law (∑ ~F = m~a) to find the rela-
tionship between the acceleration of the object (often zero)and the applied forces, setting up equations in both the xand y directions (
∑ ~Fx = m~ax and∑ ~Fy = m~ay) to solve
for any unknown quantities.
Honors Physics 2008–2009 Mr. Strong

7
Chapter 5 — Work and Energy
5.1 WorkA force that causes a displacement of an object does work(W ) on the object. The work is equal to the product of thedistance that the object is displaced times the component ofthe force in the direction of the displacement, or if θ is theangle between the displacement vector and the (constant)net applied force vector, then:
W = Fnetd cos θ
The units of work are Joules (J) which are equivalentto N ·m or kg·m2
s2 . The sign of the work being done is sig-nificant, it is possible to do a negative amount of work.
5.2 EnergyWork done to change the speed of an object will accumu-late as the kinetic energy (KE , or sometimes K) of theobject. Kinetic energy is:
KE =12mv2
If work is being done on an object, the work-kineticenergy theorem shows that:
Wnet = ∆KE
In addition to kinetic energy, there is also potentialenergy (PE , or sometimes U) which is the energy storedin an object because of its position. If the energy is storedby lifting the object to some height h, then the equation forgravitational potential energy is:
PE g = mgh
Potential energy can also be stored in a compressedor stretched spring, if x is the distance that a spring isstretched from its rest position and k is the spring con-stant measuring the stiffness of the spring (in newtons permeter) then the elastic potential energy that is storedis:
PE elastic =12kx2
The units for all types of energy are the same as thosefor work, Joules.
5.3 Conservation of EnergyThe sum an objects kinetic energy and potential energy isthe object’s mechanical energy (ME ). In the absence offriction, the total mechanical energy of a system will remainthe same. Mathematically, this can be expressed as:
ME i = ME f
In the case of a single object in motion, this becomes:
12mv2
i +mghi =12mv2
f +mghf
5.4 PowerThe rate at which energy is transferred is called power (P ).The mathematical expression for power is:
P =W
∆t=Fd
∆t= F
d
∆t= Fv
The units for power are Watts (W) which are equivalentto J
s or kg·m2
s3
Honors Physics 2008–2009 Mr. Strong

8
Chapter 6 — Momentum and Collisions
6.1 Momentum and ImpulseMomentum is a vector quantity described by the productof an object’s mass times its velocity:
~p = m~v
If an object’s momentum is known its kinetic energy canbe found as follows:
KE =p2
2m
The change in the momentum of an object is equal tothe impulse delivered to the object. The impulse is equalto the constant net external force acting on the object timesthe time over which the force acts:
∆~p = ~F∆t
Any force acting on on object will cause an impulse,including frictional and gravitational forces.
In one dimension the slope of a graph of the momen-tum of an object vs. time is the net external force actingon the object. The area under a graph of the net externalforce acting on an object vs. time is the total change inmomentum of that object.
Momentum and impulse are measured in kg·ms — there
is no special name for that unit.
6.2 Conservation of MomentumMomemtum is always conserved in any closed system:
Σ~pi = Σ~pf
For two objects, this becomes:
m1~v1i +m2~v2i = m1~v1f +m2~v2f
Any time two objects interact, the change in momen-tum of one object is equal in magnitude and opposite indirection to the change in momentum of the other object:
∆~p1 = −∆~p2
6.3 Elastic and Inelastic CollisionsThere are three types of collisions:
• Elastic — momentum and kinetic energy are con-served. Both objects return to their original shapeand move away separately. Generally:
Σ~pi = Σ~pf
ΣKEi = ΣKEf
For two objects:
m1~v1i +m2~v2i = m1~v1f +m2~v2f
12m1v
21i +
12m2v
22i =
12m1v
21f +
12m2v
22f
• Inelastic — momentum is conserved, kinetic energyis lost. One or more of the objects is deformed in thecollision. Generally:
Σ~pi = Σ~pf
ΣKEi > ΣKEf
For two objects:
m1~v1i +m2~v2i = m1~v1f +m2~v2f
12m1v
21i +
12m2v
22i >
12m1v
21f +
12m2v
22f
• Perfectly inelastic — momentum is conserved, ki-netic energy is lost. One or more objects may bedeformed and the objects stick together after the col-lision. Generally:
Σ~pi = Σ~pf
ΣKEi > ΣKEf
For two objects:
m1~v1i +m2~v2i = (m1 +m2)~vf
12m1v
21i +
12m2v
22i >
12(m1 +m2)v2
f
True elastic or perfectly inelastic collisions are very rarein the real world. If we ignore friction and other small en-ergy losses many collisions may be modeled by them.
Newton’s Laws in terms of Momentum1. Inertia:
Σ~F = 0 −→ ~p = constant
2. ~F = m~a:∆~p = ~F∆t
3. Every action has an equal and opposite reaction:
∆~p1 = −∆~p2
Honors Physics 2008–2009 Mr. Strong

9
Chapter 7 — Rotational Motion and the Law of Gravity
7.1 Measuring Ratational Motion
For an object moving in a circle with radius r through anarc length of s, the angle θ (in radians) swept by the objectis:
θ =s
r
The conversion between radians and degrees is:
θ(rad) =π
180oθ(deg)
The angular displacement (∆θ) through which anobject moves from θi to θf is, in rad:
∆θ = θf − θi =sf − si
r=
∆sr
The average angular speed (ω) of an object is, in rads ,
the ratio between the angular displacement and the timeinterval required for that displacement:
ωavg =θf − θi
∆t=
∆θ∆t
The average angular acceleration (α) is, in rads2 :
αavg =ωf − ωi
∆t=
∆ω∆t
For each quantity or relationship in linear motion thereis a corresponding quantity or relationship in angular mo-tion:
Linear Angular
x θv ωa α
vf = vi + a∆t ωf = ωi + α∆t
∆x = vi∆t+ 12a∆t
2 ∆θ = ωi∆t+ 12α∆t2
v2f = v2
i + 2a∆x ω2f = ω2
i + 2α∆θ
∆x = 12 (vi + vf )∆t ∆θ = 1
2 (ωi + ωf )∆t
7.2 Tangential and Centripetal AccelerationIn addition to the angular speed of an object moving withcircular motion it is also possible to measure the object’stangential speed (vt) or instantaneous linear speed whichis measured in m
s as follows:
vt = rω
An object’s tangential acceleration (at) can also bemeasured, in m
s2 , as follows:
at = rα
The centripetal acceleration (ac) of an object is di-rected toward the center of the object’s rotation and hasthe following magnitude:
ac =v2
t
r= rω2
7.3 Causes of Circular MotionThe centripetal force (Fc) causing a centripetal accel-eration is also directed toward the center of the object’srotation, and has the following magnitude:
Fc = mac =mv2
t
r= mrω2
The centripetal force keeping planets in orbit is a grav-itational force (Fg) and it is found with Newton’s Univer-sal Law of Gravitation:
Fg = Gm1m2
r2
where G is the constant of universal gravitation whichhas been determined experimentally to be
G = 6.673× 10−11 N ·m2
kg2
An object in a circular orbit around the Earth will sat-isfy the equation
v =
√GME
r
where ME is the mass of the Earth.
Honors Physics 2008–2009 Mr. Strong

10
Chapter 8 — Rotational Equilibrium and Dynamics
8.1 Torque
Just as a net external force acting on an object causes linearacceleration, a net torque (τ) causes angular acceleration.The torque caused by a force acting on an object is:
τ = rF sin θ
where F is the force causing the torque, r is the distancefrom the center to the point where the force acts on theobject, and θ is the angle between the force and a radialline from the object’s center through the point where theforce is acting. Torque is measured in N ·m.
The convention used by the book is that torque in acounterclockwise direction is positive and torque in a clock-wise direction is negative (this corresponds to the right-hand rule). If more that one force is acting on an objectthe torques from each force can be added to find the nettorque:
τnet =∑
τ
8.2 Rotation and Inertia
The center of mass of an object is the point at which allthe mass of the object can be said to be concentrated. Ifthe object rotates freely it will rotate about the center ofmass.
The center of gravity of an object is the point throughwhich a gravitational force acts on the object. For mostobjects the center of mass and center of gravity will be thesame point.
The moment of inertia (I) of an object is the object’sresistance to changes in rotational motion about some axis.Moment of inertia in rotational motion is analogous to massin translational motion.
Some moments of inertia for various common shapes are:
Shape I
Point mass at a distance r from the axis mr2
Solid disk or cylinder of radius r aboutthe axis
12mr
2
Solid sphere of radius r about its diameter 25mr
2
Thin spherical shell of radius r about itsdiameter
23mr
2
Thin hoop of radius r about the axis mr2
Thin hoop of radius r about the diameter 12mr
2
Thin rod of length l about its center 112ml
2
Thin rod of length l about its end 13ml
2
An object is said to be in rotational equilibrium whenthere is no net torque acting on the object. If there is also
no net force acting on the object (translational equilib-rium) then the object is in equilibrium (without any qual-ifying terms).
Type Equation Meaning
TranslationalEquilibrium
∑ ~F = 0 The net force on the ob-ject is zero
Rotational Equi-librium
∑τ = 0 The net torque on the
object is zero
8.3 Rotational DynamicsNewton’s second law can be restated for angular motion as:
τnet = Iα
This is parallel to the equation for translational motionas follows:
Type of Motion Equation
Translational ~F = m~aRotational τ = Iα
Just as moment of inertia was analogous to mass, theangular momentum (L) in rotational motion is analogousto the momentum of an object in translational motion.
This is parallel to the equation for translational motionas follows:
Type of Motion Equation
Translational ~p = m~vRotational L = Iω
The angular momemtum of an object is conserved in theabsence of an external force or torque.
Rotating objects have rotational kinetic energy ac-cording to the following equation:
KE r =12Iω2 =
L2
2I
Just as other types of mechanical energy may be con-served, rotational kinetic energy is also conserved in theabsence of friction.
8.4 Simple MachinesThere are six fundamental types of machines, called sim-ple machines, with which any other machine can be con-structed. They are levers, inclined planes, wheels, wedges,pulleys, and screws.
The main purpose of a machine is to magnify the outputforce of the machine compared to the input force, the ratioof these forces is called the mechanical advantage (MA)
Honors Physics 2008–2009 Mr. Strong
11
of the machine. It is a unitless number according to thefollowing equation:
MA =output forceinput force
=Fout
Fin
When frictional forces are accounted for, some of theoutput force is lost, causing less work to be done by themachine than by the original force. The ratio of work doneby the machine to work put in to the machine is called theefficiency (eff ) of the machine:
eff =Wout
Win
If a machine is perfectly efficient (eff = 1) then the idealmechanical advantage (IMA) can be found by comparingthe input and output distances:
IMA =din
dout
This leads to another way to find the efficiency of themachine as well:
eff =MAIMA
Honors Physics 2008–2009 Mr. Strong

12
Variables and Notation
SI Prefixes
Prefix Mult. Abb. Prefix Mult. Abb.
yocto- 10−24 y yotta- 1024 Yzepto- 10−21 z zetta- 1021 Zatto- 10−18 a exa- 1018 Efemto- 10−15 f peta- 1015 Ppico- 10−12 p tera- 1012 Tnano- 10−9 n giga- 109 Gmicro- 10−6 µ mega- 106 Mmilli- 10−3 m kilo- 103 kcenti- 10−2 c hecto- 102 hdeci- 10−1 d deka- 101 da
Units
Symbol Unit Quantity Composition
kg kilogram Mass SI base unitm meter Length SI base units second Time SI base unitA ampere Electric current SI base unitcd candela Luminous intensity SI base unitK kelvin Temperature SI base unit
mol mole Amount SI base unit
Ω ohm Resistance VA or m2·kg
s3·A2
C coulomb Charge A · sF farad Capacitance C
V or s4·A2
m2·kg
H henry Inductance V·sA or m2·kg
A2·s2
Hz hertz Frequency s−1
J joule Energy N ·m or kg·m2
s2
N newton Force kg·ms2
rad radian Angle mm or 1
T tesla Magnetic field NA·m
V volt Electric potential JC or m2·kg
s3·A
W watt Power Js or kg·m2
s3
Wb weber Magnetic flux V · s or kg·ms2·A
Notation
Notation Description
~x Vectorx Scalar, or the magnitude of ~x|~x| The absolute value or magnitude of ~x∆x Change in x∑x Sum of all x
Πx Product of all xxi Initial value of xxf Final value of xx Unit vector in the direction of x
A −→ B A implies BA ∝ B A is proportional to BA B A is much larger than B
Greek Alphabet
Name Maj. Min. Name Maj. Min.
Alpha A α Nu N νBeta B β Xi Ξ ξ
Gamma Γ γ Omicron O oDelta ∆ δ Pi Π π or $
Epsilon E ε or ε Rho P ρ or %Zeta Z ζ Sigma Σ σ or ςEta H η Tau T τ
Theta Θ θ or ϑ Upsilon Υ υIota I ι Phi Φ φ or ϕ
Kappa K κ Chi X χLambda Λ λ Psi Ψ ψ
Mu M µ Omega Ω ω
Honors Physics 2008–2009 Mr. Strong

13
Variables
Variable Description Units
α Angular acceleration rads2
θ Angular position radθc Critical angle o (degrees)θi Incident angle o (degrees)θr Refracted angle o (degrees)θ′ Reflected angle o (degrees)∆θ Angular displacement radτ Torque N ·mω Angular speed rad
sµ Coefficient of friction (unitless)µk Coefficient of kinetic friction (unitless)µs Coefficient of static friction (unitless)~a Acceleration m
s2
~ac Centripetal acceleration ms2
~ag Gravitational acceleration ms2
~at Tangential acceleration ms2
~ax Acceleration in the x direction ms2
~ay Acceleration in the y direction ms2
A Area m2
B Magnetic field strength TC Capacitance F~d Displacement m
d sin θ lever arm m~dx or ∆x Displacement in the x direction m~dy or ∆y Displacement in the y direction m
E Electric field strength NC
f Focal length m~F Force N~Fc Centripetal force N
~Felectric Electrical force N~Fg Gravitational force N~Fk Kinetic frictional force N
~Fmagnetic Magnetic force N~Fn Normal force N~Fs Static frictional force N~F∆t Impulse N · s or kg·m
s~g Gravitational acceleration m
s2
Variable Description Units
h Object height mh′ Image height mI Current AI Moment of inertia kg ·m2
KE or K Kinetic energy JKE rot Rotational kinetic energy JL Angular Momentum kg·m2
sL Self-inductance Hm Mass kgM Magnification (unitless)M Mutual inductance HMA Mechanical Advantage (unitless)ME Mechanical Energy Jn Index of refraction (unitless)p Object distance m~p Momentum kg·m
s
P Power WPE or U Potential Energy JPE elastic Elastic potential energy JPE electric Electrical potential energy J
PE g Gravitational potential energy Jq Image distance m
q or Q Charge CQ Heat, Entropy JR Radius of curvature mR Resistance Ωs Arc length mt Time s
∆t Time interval s~v Velocity m
s
vt Tangential speed ms
~vx Velocity in the x direction ms
~vy Velocity in the y direction ms
V Electric potential V∆V Electric potential difference VV Volume m3
W Work Jx or y Position m
Honors Physics 2008–2009 Mr. Strong

14
Constants
Symbol Name Established Value Value Used
ε0 Permittivity of a vacuum 8.854 187 817× 10−12 C2
N·m2 8.85× 10−12 C2
N·m2
φ Golden ratio 1.618 033 988 749 894 848 20
π Archimedes’ constant 3.141 592 653 589 793 238 46
g, ag Gravitational acceleration constant 9.79171 ms2 (varies by location) 9.81 m
s2
c Speed of light in a vacuum 2.997 924 58× 108 ms (exact) 3.00× 108 m
s
e Natural logarithmic base 2.718 281 828 459 045 235 36
e− Elementary charge 1.602 177 33× 1019 C 1.60× 1019 C
G Gravitational constant 6.672 59× 10−11 N·m2
kg2 6.67× 10−11 N·m2
kg2
kC Coulomb’s constant 8.987 551 788× 109 N·m2
C2 8.99× 109 N·m2
C2
NA Avogadro’s constant 6.022 141 5× 1023 mol−1
Astronomical Data
Symbol Object Mean Radius Mass Mean Orbit Radius Orbital Period
Á Moon 1.74× 106 m 7.36× 1022 kg 3.84× 108 m 2.36× 106 s
À Sun 6.96× 108 m 1.99× 1030 kg — —
 Mercury 2.43× 106 m 3.18× 1023 kg 5.79× 1010 m 7.60× 106 s
à Venus 6.06× 106 m 4.88× 1024 kg 1.08× 1011 m 1.94× 107 s
Ê Earth 6.37× 106 m 5.98× 1024 kg 1.496× 1011 m 3.156× 107 s
Ä Mars 3.37× 106 m 6.42× 1023 kg 2.28× 1011 m 5.94× 107 s
Ceres1 4.71× 105 m 9.5× 1020 kg 4.14× 1011 m 1.45× 108 s
Å Jupiter 6.99× 107 m 1.90× 1027 kg 7.78× 1011 m 3.74× 108 s
Æ Saturn 5.85× 107 m 5.68× 1026 kg 1.43× 1012 m 9.35× 108 s
Ç Uranus 2.33× 107 m 8.68× 1025 kg 2.87× 1012 m 2.64× 109 s
È Neptune 2.21× 107 m 1.03× 1026 kg 4.50× 1012 m 5.22× 109 s
É Pluto1 1.15× 106 m 1.31× 1022 kg 5.91× 1012 m 7.82× 109 s
Eris21 2.4× 106 m 1.5× 1022 kg 1.01× 1013 m 1.75× 1010 s
1Ceres, Pluto, and Eris are classified as “Dwarf Planets” by the IAU2Eris was formerly known as 2003 UB313
Honors Physics 2008–2009 Mr. Strong

15
Mathematics Review for Physics
This is a summary of the most important parts of math-ematics as we will use them in a physics class. There arenumerous parts that are completely omitted, others aregreatly abridged. Do not assume that this is a completecoverage of any of these topics.
AlgebraFundamental properties of algebra
a+ b = b+ a Commutative law for ad-dition
(a+ b) + c = a+ (b+ c) Associative law for addi-tion
a+ 0 = 0 + a = a Identity law for additiona+ (−a) = (−a) + a = 0 Inverse law for addition
ab = ba Commutative law formultiplication
(ab)c = a(bc) Associative law for mul-tiplication
(a)(1) = (1)(a) = a Identity law for multipli-cation
a 1a = 1
aa = 1 Inverse law for multipli-cation
a(b+ c) = ab+ ac Distributive law
Exponents(ab)n = anbn (a/b)n = an/bn
anam = an+m 0n = 0an/am = an−m a0 = 1(an)m = a(mn) 00 = 1 (by definition)
Logarithms
x = ay −→ y = loga x
loga(xy) = loga x+ loga y
loga
(x
y
)= loga x− loga y
loga(xn) = n loga x
loga
(1x
)= − loga x
loga x =logb x
logb a= (logb x)(loga b)
Binomial Expansions
(a+ b)2 = a2 + 2ab+ b2
(a+ b)3 = a3 + 3a2b+ 3ab2 + b3
(a+ b)n =n∑
i=0
n!i!(n− i)!
aibn−i
Quadratic formulaFor equations of the form ax2 +bx+c = 0 the solutions are:
x =−b±
√b2 − 4ac
2a
Geometry
Shape Area Volume
Triangle A = 12bh —
Rectangle A = lw —
Circle A = πr2 —
Rectangularprism
A = 2(lw + lh+ hw) V = lwh
Sphere A = 4πr2 V = 43πr
3
Cylinder A = 2πrh+ 2πr2 V = πr2h
Cone A = πr√r2 + h2 + πr2 V = 1
3πr2h
TrigonometryIn physics only a small subset of what is covered in atrigonometry class is likely to be used, in particular sine, co-sine, and tangent are useful, as are their inverse functions.As a reminder, the relationships between those functionsand the sides of a right triangle are summarized as follows:
θ
opp
adj
hypsin θ =
opp
hypcos θ =
adj
hyp
tan θ =opp
adj=
sin θcos θ
The inverse functions are only defined over a limited range.The tan−1 x function will yield a value in the range −90 <θ < 90, sin−1 x will be in −90 ≤ θ ≤ 90, and cos−1 xwill yield one in 0 ≤ θ ≤ 180. Care must be taken toensure that the result given by a calculator is in the correctquadrant, if it is not then an appropriate correction mustbe made.
Degrees 0o 30o 45o 60o 90o 120o 135o 150o 180o
Radians 0 π6
π4
π3
π2
2π3
3π4
5π6 π
sin 0 12
√2
2
√3
2 1√
32
√2
212 0
cos 1√
32
√2
212 0 − 1
2 −√
22 −
√3
2 −1
tan 0√
33 1
√3 ∞ −
√3 −1 −
√3
3 0
sin2 θ + cos2 θ = 1 2 sin θ cos θ = sin(2θ)
Honors Physics 2008–2009 Mr. Strong

16
Trigonometric functions in terms of each other
sin θ = sin θ√
1− cos2 θ tan θ√1+tan2 θ
cos θ =√
1− sin2 θ cos θ 1√1+tan2 θ
tan θ = sin θ√1−sin2 θ
√1−cos2 θcos θ tan θ
csc θ = 1sin θ
1√1−cos2 θ
√1+tan2 θtan θ
sec θ = 1√1−sin2 θ
1cos θ
√1 + tan2 θ
cot θ =√
1−sin2 θ
sin θcos θ√
1−cos2 θ1
tan θ
sin θ = 1csc θ
√sec2 θ−1sec θ
1√1+cot2 θ
cos θ =√
csc2 θ−1csc θ
1sec θ
cot θ√1+cot2 θ
tan θ = 1√csc2 θ−1
√sec2 θ − 1 1
cot θ
csc θ = csc θ sec θ√sec2 θ−1
√1 + cot2 θ
sec θ = csc θ√csc2 θ−1
sec θ√
1+cot2 θcot θ
cot θ =√
csc2 θ − 1 1√sec2 θ−1
cot θ
Law of sines, law of cosines, area of a triangle
HH
HHHH
A
B
C
a
b
c
a2 = b2 + c2 − 2bc cosAb2 = a2 + c2 − 2ac cosBc2 = a2 + b2 − 2ab cosC
a
sinA=
b
sinB=
c
sinC
let s = 12 (a+ b+ c)
Area=√s(s− a)(s− b)(s− c)
Area= 12bc sinA = 1
2ac sinB = 12ab sinC
VectorsA vector is a quantity with both magnitude and direction,such as displacement or velocity. Your textbook indicatesa vector in bold-face type as V and in class we have beenusing ~V . Both notations are equivalent.
A scalar is a quantity with only magnitude. This caneither be a quantity that is directionless such as time ormass, or it can be the magnitude of a vector quantity suchas speed or distance traveled. Your textbook indicates ascalar in italic type as V , in class we have not done any-thing to distinguish a scalar quantity. The magnitude of ~Vis written as V or |~V |.
A unit vector is a vector with magnitude 1 (a dimen-sionless constant) pointing in some significant direction. Aunit vector pointing in the direction of the vector ~V is in-dicated as V and would commonly be called V -hat. Anyvector can be normalized into a unit vector by dividing it byits magnitude, giving V = ~V
V . Three special unit vectors, ı,, and k are introduced with chapter 3. They point in thedirections of the positive x, y, and z axes, respectively (asshown below).
6
?
-
y+
−
x+−
z+
−6
-
ı
k
Vectors can be added to other vectors of the same di-mension (i.e. a velocity vector can be added to anothervelocity vector, but not to a force vector). The sum of allvectors to be added is called the resultant and is equivalentto all of the vectors combined.
Multiplying VectorsAny vector can be multiplied by any scalar, this has theeffect of changing the magnitude of the vector but not itsdirection (with the exception that multiplying a vector bya negative scalar will reverse the direction of the vector).As an example, multiplying a vector ~V by several scalarswould give:
- -
-
~V 2~V
.5~V −1~V
In addition to scalar multiplication there are also twoways to multiply vectors by other vectors. They will not bedirectly used in class but being familiar with them may helpto understand how some physics equations are derived. Thefirst, the dot product of vectors ~V1 and ~V2, represented as~V1 · ~V2 measures the tendency of the two vectors to point inthe same direction. If the angle between the two vectors isθ the dot product yields a scalar value as
~V1 · ~V2 = V1V2 cos θ
The second method of multiplying two vectors, thecross product, (represented as ~V1× ~V2) measures the ten-dency of vectors to be perpendicular to each other. It yieldsa third vector perpendicular to the two original vectors withmagnitude
|~V1 × ~V2| = V1V2 sin θ
The direction of the cross product is perpendicular to thetwo vectors being crossed and is found with the right-handrule — point the fingers of your right hand in the directionof the first vector, curl them toward the second vector, andthe cross product will be in the direction of your thumb.
Adding Vectors GraphicallyThe sum of any number of vectors can be found by drawingthem head-to-tail to scale and in proper orientation thendrawing the resultant vector from the tail of the first vector
Honors Physics 2008–2009 Mr. Strong

17
to the point of the last one. If the vectors were drawn ac-curately then the magnitude and direction of the resultantcan be measured with a ruler and protractor. In the ex-ample below the vectors ~V1, ~V2, and ~V3 are added to yield~Vr
-
AAAAAAU
~V1
~V2 ~V3
~V1, ~V2, ~V3
-AAAAAAU
~V1
~V2
~V3
~V1 + ~V2 + ~V3
-AAAAAAU
~V1
~V2
~V3
-~Vr
~Vr = ~V1 + ~V2 + ~V3
Adding Parallel VectorsAny number of parallel vectors can be directly added byadding their magnitudes if one direction is chosen as pos-itive and vectors in the opposite direction are assigned anegative magnitude for the purposes of adding them. Thesum of the magnitudes will be the magnitude of the resul-tant vector in the positive direction, if the sum is negativethen the resultant will point in the negative direction.
Adding Perpendicular VectorsPerpendicular vectors can be added by drawing them as aright triangle and then finding the magnitude and directionof the hypotenuse (the resultant) through trigonometry andthe Pythagorean theorem. If ~Vr = ~Vx + ~Vy and ~Vx ⊥ ~Vy
then it works as follows:
-~Vx
6
~Vy
-~Vx
6
~Vy
~Vr
θ
Since the two vectors to be added and the resultant forma right triangle with the resultant as the hypotenuse thePythagorean theorem applies giving
Vr = |~Vr| =√V 2
x + V 2y
The angle θ can be found by taking the inverse tangent ofthe ratio between the magnitudes of the vertical and hori-zontal vectors, thus
θ = tan−1 Vy
Vx
As was mentioned above, care must be taken to ensure thatthe angle given by the calculator is in the appropriate quad-rant for the problem, this can be checked by looking at the
diagram drawn to solve the problem and verifying that theanswer points in the direction expected, if not then makean appropriate correction.
Resolving a Vector Into ComponentsJust two perpendicular vectors can be added to find asingle resultant, any single vector ~V can be resolved intotwo perpendicular component vectors ~Vx and ~Vy so that~V = ~Vx + ~Vy.
~V
θ ~Vx
~Vy
~V
θ
-
6
As the vector and its components can be drawn as aright triangle the ratios of the sides can be found withtrigonometry. Since sin θ = Vy
V and cos θ = Vx
V it followsthat Vx = V cos θ and Vy = V sin θ or in a vector form,~Vx = V cos θı and ~Vy = V sin θ. (This is actually an appli-cation of the dot product, ~Vx = (~V · ı)ı and ~Vy = (~V · ),but it is not necessary to know that for this class)
Adding Any Two Vectors AlgebraicallyOnly vectors with the same direction can be directly added,so if vectors pointing in multiple directions must be addedthey must first be broken down into their components, thenthe components are added and resolved into a single resul-tant vector — if in two dimensions ~Vr = ~V1 + ~V2 then
*
~V1
~V2
~Vr
~Vr = ~V1 + ~V2
*
-
-6
6
~V1
~V2
~Vr
~V1x
~V2x
~V1y
~V2y
~V1 = ~V1x + ~V1y
~V2 = ~V2x + ~V2y
~Vr = (~V1x + ~V1y) + (~V2x + ~V2y)
*
- -
6
6
~V1
~V2
~Vr
~V1x~V2x
~V1y
~V2y
~Vr = (~V1x + ~V2x) + (~V1y + ~V2y)
Once the sums of the component vectors in each direc-tion have been found the resultant can be found from themjust as an other perpendicular vectors may be added. Since
Honors Physics 2008–2009 Mr. Strong

18
from the last figure ~Vr = (~V1x+~V2x)+(~V1y +~V2y) and it waspreviously established that ~Vx = V cos θı and ~Vy = V sin θit follows that
~Vr = (V1 cos θ1 + V2 cos θ2) ı+ (V1 sin θ1 + V2 sin θ2)
and
Vr =√
(V1x + V2x)2 + (V1y + V2y)2
=√
(V1 cos θ1 + V2 cos θ2)2 + (V1 sin θ1 + V2 sin θ2)
2
with the direction of the resultant vector ~Vr, θr, being foundwith
θr = tan−1 V1y + V2y
V1x + V2x= tan−1 V1 sin θ1 + V2 sin θ2
V1 cos θ1 + V2 cos θ2
Adding Any Number of Vectors Algebraically
For a total of n vectors ~Vi being added with magnitudes Vi
and directions θi the magnitude and direction are:
*
- - -
6
6
6
~V1
~V2
~V3
~Vr
~V1x~V2x
~V3x
~V1y
~V2y
~V3y
~Vr =
(n∑
i=1
Vi cos θi
)ı+
(n∑
i=1
Vi sin θi
)
Vr =
√√√√( n∑i=1
Vi cos θi
)2
+
(n∑
i=1
Vi sin θi
)2
θr = tan−1
n∑i=1
Vi sin θi
n∑i=1
Vi cos θi
(The figure shows only three vectors but this method willwork with any number of them so long as proper care istaken to ensure that all angles are measured the same wayand that the resultant direction is in the proper quadrant.)
CalculusAlthough this course is based on algebra and not calculus,it is sometimes useful to know some of the properties ofderivatives and integrals. If you have not yet learned cal-culus it is safe to skip this section.
DerivativesThe derivative of a function f(t) with respect to t is afunction equal to the slope of a graph of f(t) vs. t at everypoint, assuming that slope exists. There are several waysto indicate that derivative, including:
ddtf(t)
f ′(t)
f(t)
The first one from that list is unambiguous as to the in-dependent variable, the others assume that there is only onevariable, or in the case of the third one that the derivativeis taken with respect to time. Some common derivativesare:
ddttn = ntn−1
ddt
sin t = cos t
ddt
cos t = − sin t
ddtet = et
If the function is a compound function then there are afew useful rules to find its derivative:
ddtcf(t) = c
ddtf(t) c constant for all t
ddt
[f(t) + g(t)] =ddtf(t) +
ddtg(t)
ddtf(u) =
ddtu
dduf(u)
IntegralsThe integral, or antiderivative of a function f(t) withrespect to t is a function equal to the the area under agraph of f(t) vs. t at every point plus a constant, assumingthat f(t) is continuous. Integrals can be either indefinite ordefinite. An indefinite integral is indicated as:∫
f(t) dt
while a definite integral would be indicated as∫ b
a
f(t) dt
to show that it is evaluated from t = a to t = b, as in:∫ b
a
f(t) dt =∫f(t) dt|t=b
t=a =∫f(t) dt|t=b −
∫f(t) dt|t=a
Some common integrals are:∫tn dt =
tn+1
n+ 1+ C n 6= −1
Honors Physics 2008–2009 Mr. Strong

19
∫t−1 dt = ln t+ C∫
sin tdt = − cos t+ C∫cos tdt = sin t+ C∫et dt = et + C
There are rules to reduce integrals of some compoundfunctions to simpler forms (there is no general rule to reducethe integral of the product of two functions):∫
cf(t) dt = c
∫f(t) dt c constant for all t∫
[f(t) + g(t)] dt =∫f(t) dt+
∫g(t) dt
Series Expansions
Some functions are difficult to work with in their normalforms, but once converted to their series expansion can bemanipulated easily. Some common series expansions are:
sinx = x− x3
3!+x5
5!− x7
7!+ · · · =
∞∑i=0
(−1)i x2i+1
(2i+ 1)!
cosx = 1− x2
2!+x4
4!− x6
6!+ · · · =
∞∑i=0
(−1)i x2i
(2i)!
ex = 1 + x+x2
2!+x3
3!+x4
4!+ · · · =
∞∑i=0
xi
(i)!
Honors Physics 2008–2009 Mr. Strong

20
Physics Using Calculus
In our treatment of mechanics the majority of the equa-tions that have been covered in the class have been eitherapproximations or special cases where the acceleration orforce applied have been held constant. This is requiredbecause the class is based on algebra and to do otherwisewould require the use of calculus.
None of what is presented here is a required part of theclass, it is here to show how to handle cases outside theusual approximations and simplifications. Feel free to skipthis section, none of it will appear as a required part of anyassignment or test in this class.
Notation
Because the letter ‘d’ is used as a part of the notation ofcalculus the variable ‘r’ is often used to represent the posi-tion vector of the object being studied. (Other authors use‘s’ for the spatial position or generalize ‘x’ to two or moredimensions.) In a vector form that would become ~r to giveboth the magnitude and direction of the position. It is as-sumed that the position, velocity, acceleration, etc. can beexpressed as a function of time as ~r(t), ~v(t), and ~a(t) butthe dependency on time is usually implied and not shownexplicitly.
Translational Motion
Many situations will require an acceleration that is not con-stant. Everything learned about translational motion sofar used the simplification that the acceleration remainedconstant, with calculus we can let the acceleration be anyfunction of time.
Since velocity is the slope of a graph of position vs. timeat any point, and acceleration is the slope of velocity vs.time these can be expressed mathematically as derivatives:
~v =ddt~r
~a =ddt~v =
d2
dt2~r
The reverse of this relationship is that the displacementof an object is equal to the area under a velocity vs. timegraph and velocity is equal to the area under an accelera-tion vs. time graph. Mathematically this can be expressedas integrals:
~v =∫~adt
~r =∫~v dt =
∫∫~adt2
Using these relationships we can derive the main equa-tions of motion that were introduced by starting with the
integral of a constant velocity ~a(t) = ~a as∫ tf
ti
~adt = ~a∆t+ C
The constant of integration, C, can be shown to be the ini-tial velocity, ~vi, so the entire expression for the final velocitybecomes
~vf = ~vi + ~a∆t
or~vf (t) = ~vi + ~at
Similarly, integrating that expression with respect to timegives an expression for position:∫ tf
ti
(~vi + ~at) dt = ~vi∆t+12~a∆t2 + C
Once again the constant of integration, C, can be shown tobe the initial position, ~ri, yielding an expression for positionvs. time
~rf (t) = ~ri + ~vit+12~at2
While calculus can be used to derive the algebraic formsof the equations the reverse is not true. Algebra can han-dle a subset of physics and only at the expense of needingto remember separate equations for various special cases.With calculus the few definitions shown above will sufficeto predict any linear motion.
Work and PowerThe work done on an object is the integral of dot product ofthe force applied with the path the object takes, integratedas a contour integral over the path.
W =∫
C
~F · d~r
The power developed is the time rate of change of thework done, or the derivative of the work with respect totime.
P =ddtW
MomentumNewton’s second law of motion changes from the familiar~F = m~a to the statement that the force applied to an objectis the time derivative of the object’s momentum.
~F =ddt~p
Similarly, the impulse delivered to an object is the in-tegral of the force applied in the direction parallel to themotion with respect to time.
∆~p =∫
~F dt
Honors Physics 2008–2009 Mr. Strong

21
Rotational MotionThe equations for rotational motion are very similar tothose for translational motion with appropriate variablesubstitutions. First, the angular velocity is the time deriva-tive of the angular position.
~ω =d~θdt
The angular acceleration is the time derivative of the an-gular velocity or the second time derivative of the angularposition.
~α =d~ωdt
=d2~θ
dt2
The angular velocity is also the integral of the angularacceleration with respect to time.
~ω =∫~α dt
The angular position is the integral of the angular veloc-ity with respect to time or the second integral of the angularacceleration with respect to time.
~θ =∫~ω dt =
∫∫~α dt2
The torque exerted on an object is the cross product ofthe radius vector from the axis of rotation to the point ofaction with the force applied.
~τ = ~r × ~F
The moment of inertia of any object is the integral ofthe square of the distance from the axis of rotation to eachelement of the mass over the entire mass of the object.
I =∫r2 dm
The torque applied to an object is the time derivativeof the object’s angular momentum.
~τ =ddt~L
The integral of the torque with respect to time is theangular momentum of the object.
~L =∫~τ dt
Honors Physics 2008–2009 Mr. Strong

22
Data Analysis
Comparative Measures
Percent ErrorWhen experiments are conducted where there is a calcu-lated result (or other known value) against which the ob-served values will be compared the percent error betweenthe observed and calculated values can be found with
percent error =∣∣∣∣observed value − accepted value
accepted value
∣∣∣∣× 100%
Percent DifferenceWhen experiments involve a comparison between two ex-perimentally determined values where neither is regardedas correct then rather than the percent error the percentdifference can be calculated. Instead of dividing by the ac-cepted value the difference is divided by the mean of thevalues being compared. For any two values, a and b, thepercent difference is
percent difference =∣∣∣∣ a− b
12 (a+ b)
∣∣∣∣× 100%
Dimensional Analysis and Units on Con-stantsConsider a mass vibrating on the end of a spring. The equa-tion relating the mass to the frequency on graph might looksomething like
y =3.658x2
− 1.62
This isn’t what we’re looking for, a first pass would be tochange the x and y variables into f and m for frequencyand mass, this would then give
m =3.658f2
− 1.62
This is progress but there’s still a long way to go. Massis measured in kg and frequency is measured in s−1, sincethese variables represent the entire measurement (includ-ing the units) and not just the numeric portion they do not
need to be labeled, but the constants in the equation doneed to have the correct units applied.
To find the units it helps to first re-write the equationusing just the units, letting some variable such as u (or u1,u2, u3, etc.) stand for the unknown units. The exampleequation would then become
kg =u1
(s−1)2+ u2
Since any quantities being added or subtracted must havethe same units the equation can be split into two equations
kg =u1
(s−1)2and kg = u2
The next step is to solve for u1 and u2, in this case u2 = kgis immediately obvious, u1 will take a bit more effort. Afirst simplification yields
kg =u1
s−2
then multiplying both sides by s−2 gives
(s−2)(kg) =( u1
s−2
)(s−2)
which finally simplifies and solves to
u1 = kg · s−2
Inserting the units into the original equation finally yields
m =3.658 kg · s−2
f2− 1.62 kg
which is the final equation with all of the units in place.Checking by choosing a frequency and carrying out the cal-culations in the equation will show that it is dimensionallyconsistent and yields a result in the units for mass (kg) asexpected.
Honors Physics 2008–2009 Mr. Strong

23
Midterm Exam Description
• 99 Multiple Choice Items (31 problems, 68 questions)
• Calculators will not be permitted
• Many test items contain numbers, but do not require calculations to solve. Before plugging values into an equation,look at the possible responses. The correct response may be obvious due to significant figures, order of magnitudeor simple common sense.
• Since all test items are worth one point, you should first complete the items that you are most sure of and then gothrough the exam a second time. You should make sure that you answer every question on the exam.
• Exam items are from the following categories:
– Chapter 1 — The Science of Physicsunits of measurementsignificant figures
– Chapter 2 — Motion in One Dimensiondisplacement and velocityaccelerationfalling objectsgraphs of motion
– Chapter 3 — Two-Dimensional Motion and Vectorsvectors and vector operationsprojectilesrelative motion
– Chapter 4 — Forces and the Laws of MotionNewton’s 1st LawNet forcesNewton’s 2nd LawNewton’s 3rd LawFriction
– Chapter 5 — Work and Energyworktypes of energyconservation of energypower
– Chapter 6 — Momentum and Collisionsmomentum and impulseconservation of momentumtypes of collisions
– Chapter 7 — Rotational Motion and the Law of Gravitymeasuring rotational motionrotational kinematics equationscentripetal force and accelerationgravitational forces
Chapter 8 will not be included on the first semester exam.
Honors Physics 2008–2009 Mr. Strong

24
Semester Exam Equation Sheet
This is a slightly reduced copy of the equation sheet that you will receive with the semester exam.
Honors Physics – 1st Semester Final Constants and Equations
Kinematics Linear
avd v t= Δ
( )12 i fd v v t= + Δ
( )212id v t a t= Δ + Δ
f iv v a t= + Δ
2 2 2f iv v ad= +
x xd v t= Δ ( )21
2y y yd v t a t= Δ + Δ
sinyv v θ=
cosxv v θ=
Kinematics Rotational
dr
θ =
vr
ω =
ar
α =
av tθ ω= Δ
( )212i t tθ ω α= Δ + Δ
( )12 i f tθ ω ω= + Δ
f i tω ω α= + Δ
2 2f i 2ω ω αθ= +
Dynamics Linear
F ma=∑
gF mg=
cosgF F θ⊥ =
singF F θ=
f NF Fμ=
tanμ θ=
springF kx= −
1 22grav
m mF Gr
=
Dynamics Circular
2 rvTπ
=
2 2
2
4c
v rar T
π= =
2 2
2
4c
v rF m mr T
π= =
1T f=
Dynamics Rotational
Iτ α=∑
2point massI mr=
Work, Power, Energy Linear
cosW Fd θ=
gPE mgh=
212elasticPE kx=
212KE mv=
0PE KE WΔ + Δ + =
WP Fvt
= =Δ
Work, Power, Energy Rotational
W τθ= 21
2KE Iω=
P τω=
Momentum Linear
P mv=
1 1 2 2 1 1 2 2i f f fm v m v m v m v+ = +
F t m vΔ = Δ
Rotational
L Iω=
Constants
210. msg =
2
211 N m
kg6.67 10G − ⋅= ×
8 ms3.00 10c = ×
2
29 N m
C9.00 10K ⋅= ×
Note that some equations may be slightly different than the ones we have used in class, the sheet that you receivewill have these forms of the equations, it will be up to you to know how to use them or to know other forms that youare able to use.
Honors Physics 2008–2009 Mr. Strong

25
Mix
edRev
iew
Exe
rcises
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s4
The
Scie
nce
ofPh
ysic
s
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
1
1.C
onve
rt t
he
follo
win
g m
easu
rem
ents
to t
he
un
its
spec
ifie
d.
a.2.
5 da
ys to
sec
onds
b.35
km
to m
illim
eter
s
c.43
cm
to k
ilom
eter
s
d.22
mg
to k
ilogr
ams
e.67
1 kg
to m
icro
gram
s
f.8.
76×
107
mW
to g
igaw
atts
g.1.
753
×10
–13
s to
pic
osec
onds
2.A
ccor
din
g to
th
e ru
les
give
n in
Ch
apte
r 1
ofyo
ur
text
book
,how
man
y
sign
ific
ant
figu
res
are
ther
e in
th
e fo
llow
ing
mea
sure
men
ts?
a.0.
0845
kg
b.37
.00
h
c.8
630
000.
000
mi
d.0.
000
000
0217
g
e.75
0 in
.
f.0.
5003
s
Pow
erP
refi
xA
bbre
viat
ion
10–1
deci
-d
101
deka
-da
103
kilo
-k
106
meg
a-M
109
giga
-G
1012
tera
-T
1015
peta
-P
1018
exa-
E
Pow
erP
refi
xA
bbre
viat
ion
10–1
8at
to-
a
10–1
5fe
mto
-f
10–1
2pi
co-
p
10–9
nan
o-n
10–6
mic
ro-
m
10–3
mill
i-m
10–2
cen
ti-
c
HRW material copyrighted under notice appearing earlier in this book.
Chap
ter 1
5
3.W
ith
out c
alcu
lati
ng
the
resu
lt,f
ind
the
nu
mbe
r of
sign
ific
ant
figu
res
in
the
follo
win
g pr
odu
cts
and
quot
ien
ts.
a.0.
0050
32×
4.00
09
b.0.
0080
750
÷10
.037
c.(3
.52
×10
–11 )
×(7
.823
×10
11)
4.C
alcu
late
a+
b,a
−b,
a×
b,an
da
÷b
wit
h t
he
corr
ect
nu
mbe
r of
sign
ific
ant
figu
res
usi
ng
the
follo
win
g n
um
bers
.
a.a
=0.
005
078;
b=
1.00
03
a+
b=
a−
b=
a×
b=
a÷
b=
b.a
=4.
231
19 ×
107 ;b
= 3
.654
×10
6
a+
b=
a−
b=
a×
b=
a÷
b=
5.C
alcu
late
th
e ar
ea o
fa
carp
et 6
.35
m lo
ng
and
2.50
m w
ide.
Exp
ress
you
r
answ
er w
ith
th
e co
rrec
t n
um
ber
ofsi
gnif
ican
t fi
gure
s.
6.T
he
tabl
e be
low
con
tain
s m
easu
rem
ents
of
the
tem
pera
ture
an
d vo
lum
e of
an a
ir b
allo
on a
s it
hea
ts u
p.
In t
he
grid
at
righ
t,sk
etch
a g
raph
th
at b
est
desc
ribe
s th
ese
data
.
Tem
per
atu
re
Vol
um
e (°
C)
(m3 )
20.
0502
270.
0553
520.
0598
770.
0646
102
0.07
04
127
0.07
48
152
0.07
96
025
5075
100
125
150
175
0.08
00
0.07
50
0.07
00
0.06
50
0.06
00
0.05
50
0.05
00
Volume (m3)
Tem
pera
ture
(°C
)
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
1
Honors Physics 2008–2009 Mr. Strong

26HRW material copyrighted under notice appearing earlier in this book.
Mot
ion
in O
ne D
imen
sion
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
2
Chap
ter 2
9
1.D
uri
ng
a re
lay
race
alo
ng
a st
raig
ht
road
,th
e fi
rst
run
ner
on
a t
hre
e-
pers
on te
am r
un
s d 1
wit
h a
con
stan
t ve
loci
ty v
1.T
he
run
ner
th
en h
ands
off
the
bato
n to
th
e se
con
d ru
nn
er,w
ho
run
s d 2
wit
h a
con
stan
t ve
loci
ty
v 2.T
he
bato
n is
th
en p
asse
d to
th
e th
ird
run
ner
,wh
o co
mpl
etes
th
e ra
ce
by t
rave
ling
d 3w
ith
a c
onst
ant
velo
city
v3.
a.In
term
s of
dan
dv,
fin
d th
e ti
me
it t
akes
for
each
ru
nn
er to
com
plet
e
a se
gmen
t of
the
race
.
3 ren
nu
R2 re
nn
uR
1 ren
nu
R
b.W
hat
is t
he
tota
l dis
tan
ce o
fth
e ra
ce c
ours
e?
c.W
hat
is t
he
tota
l tim
e it
tak
es t
he
team
to c
ompl
ete
the
race
?
2.T
he e
quat
ion
s be
low
incl
ude
the
equ
atio
ns
for
stra
ight
-lin
e m
otio
n.
For
each
of
the
follo
win
g pr
oble
ms,
indi
cate
whi
ch e
quat
ion
or
equ
atio
ns
you
wou
ld u
se to
sol
ve th
e pr
oble
m,b
ut d
o n
ot a
ctu
ally
per
form
the
calc
ula
tion
s.
a.D
uri
ng
take
off,
a pl
ane
acce
lera
tes
at 4
m/s
2an
d ta
kes
40 s
to r
each
take
off
spee
d.W
hat
is t
he
velo
city
of
the
plan
e at
tak
eoff
?
b.A
car
wit
h a
n in
itia
l spe
ed o
f31
.4 k
m/h
acc
eler
ates
at
a u
nif
orm
rat
e
of1.
2 m
/s2
for
1.3
s.W
hat
is t
he
fin
al s
peed
an
d di
spla
cem
ent
ofth
e
car
duri
ng
this
tim
e?
∆x=
1 2 (v i
+v f
)∆t
∆x=
1 2 (v f
)∆t
∆x=v i
(∆t)
+1 2 a
(∆t)
2∆x
=1 2 a
(∆t)
2
v f=v i
+a(
∆t)
v f=
a(∆t
)
v f2
=v i
2+
2a∆x
v f2
=2a
∆x
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s103.
Bel
ow is
th
e ve
loci
ty-t
ime
grap
h o
fan
obj
ect
mov
ing
alon
g a
stra
igh
t
path
.Use
th
e in
form
atio
n in
th
e gr
aph
to fi
ll in
th
e ta
ble
belo
w.
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
2
Tim
eM
otio
nv
ain
terv
alA B C D E
4.A
bal
l is
thro
wn
upw
ard
wit
h a
n in
itia
l vel
ocit
y of
9.8
m/s
from
th
e to
p
ofa
build
ing.
a.Fi
ll in
th
e ta
ble
belo
w s
how
ing
the
ball’
s po
siti
on,v
eloc
ity,
and
acce
l-
erat
ion
at
the
end
ofea
ch o
fth
e fi
rst
4 s
ofm
otio
n.
Tim
eP
osit
ion
Vel
ocit
yA
ccel
erat
ion
(s)
(m)
(m/s
)(m
/s2 )
1 2 3 4
b.In
wh
ich
sec
ond
does
th
e ba
ll re
ach
th
e to
p of
its
flig
ht?
c.In
wh
ich
sec
ond
does
th
e ba
ll re
ach
th
e le
vel o
fth
e ro
of,o
n t
he
way
dow
n?
For
each
oft
he le
tter
ed in
terv
als
belo
w,i
ndi
cate
the
mot
ion
oft
he o
bjec
t
(whe
ther
it is
spe
edin
g up
,slo
win
g do
wn
,or
at r
est)
,the
dir
ecti
on o
fthe
velo
city
(+,
−,or
0),
and
the
dire
ctio
n o
fthe
acc
eler
atio
n (
+,−,
or 0
).
Velocity (m/s)
time
(s)
15 10 5 070
100
AB
CD
E30
5020
6040
Honors Physics 2008–2009 Mr. Strong

27
Two-
Dim
ensi
onal
Mot
ion
and
Vect
ors
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
3
Chap
ter 3
15
1.T
he
diag
ram
bel
ow in
dica
tes
thre
e po
siti
ons
to
whi
ch a
wom
an tr
avel
s.Sh
e st
arts
at p
osit
ion
A,
trav
els
3.0
km to
the
wes
t to
poin
t B,t
hen
6.0
km
to
the
nor
th to
poi
nt C
.She
then
bac
ktra
cks,
and
trav
els
2.0
km to
the
sou
th to
poi
nt D
.
a.In
th
e sp
ace
prov
ided
,dia
gram
th
e di
spla
cem
ent
vect
ors
for
each
seg
men
t of
the
wom
an’s
tri
p.
b.W
hat i
s th
e to
tal d
ispl
acem
ent o
fth
e w
oman
from
her
init
ial p
osit
ion
,A,t
o he
r fi
nal
pos
itio
n,D
?
c.W
hat i
s th
e to
tal d
ista
nce
trav
eled
by
the
wom
an
from
her
init
ial p
osit
ion,
A,t
o he
r fin
al p
osit
ion,
D?
2.Tw
o pr
ojec
tile
s ar
e la
un
ched
from
th
e gr
oun
d,an
d bo
th r
each
th
e sa
me
vert
ical
hei
ght.
How
ever
,pro
ject
ile B
tra
vels
tw
ice
the
hor
izon
tal d
ista
nce
as p
roje
ctile
A b
efor
e h
itti
ng
the
grou
nd.
a.H
ow la
rge
is t
he
vert
ical
com
pon
ent
ofth
e in
itia
l vel
ocit
y of
proj
ec-
tile
B c
ompa
red
wit
h t
he
vert
ical
com
pon
ent
ofth
e in
itia
l vel
ocit
y
ofpr
ojec
tile
A?
b.H
ow la
rge
is t
he
hor
izon
tal c
ompo
nen
t of
the
init
ial v
eloc
ity
ofpr
o-
ject
ile B
com
pare
d w
ith
th
e h
oriz
onta
l com
pon
ent
ofth
e in
itia
l
velo
city
of
proj
ecti
le A
?
c.Su
ppos
e pr
ojec
tile
A is
lau
nch
ed a
t an
an
gle
of45
°to
th
e h
oriz
onta
l.
Wh
at is
th
e ra
tio,v B
/vA
,of
the
spee
d of
proj
ecti
le B
,vB
,com
pare
d
wit
h t
he
spee
d of
proj
ecti
le A
,vA
?
HRW material copyrighted under notice appearing earlier in this book.
C D BA
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s163.
A p
asse
nge
r at
an
air
port
ste
ps o
nto
a m
ovin
g si
dew
alk
that
is 1
00.0
m
lon
g an
d is
mov
ing
at a
spe
ed o
f1.
5 m
/s.T
he
pass
enge
r th
en s
tart
s w
alk-
ing
at a
spe
ed o
f1.
0 m
/s in
th
e sa
me
dire
ctio
n a
s th
e si
dew
alk
is m
ovin
g.
Wh
at is
th
e pa
ssen
ger’
s ve
loci
ty r
elat
ive
to t
he
follo
win
g ob
serv
ers?
a.A
per
son
sta
ndi
ng
stat
ion
ary
alon
gsid
e to
th
e m
ovin
g si
dew
alk.
b.A
per
son
sta
ndi
ng
stat
ion
ary
onth
e m
ovin
g si
dew
alk.
c.A
per
son
wal
kin
g al
ongs
ide
the
side
wal
k w
ith
a s
peed
of
2.0
m/s
an
d
in a
dir
ecti
on o
ppos
ite
the
mot
ion
of
the
side
wal
k.
d.A
per
son
rid
ing
in a
car
t alo
ngs
ide
the
side
wal
k w
ith
a sp
eed
of5.
0 m
/s
and
in th
e sa
me
dire
ctio
n in
whi
ch th
e si
dew
alk
is m
ovin
g.
e.A
per
son
rid
ing
in a
car
t w
ith
a s
peed
of
4.0
m/s
an
d in
a d
irec
tion
perp
endi
cula
r to
th
e di
rect
ion
in w
hic
h t
he
side
wal
k is
mov
ing.
4.U
se t
he
info
rmat
ion
giv
en in
item
3 to
an
swer
th
e fo
llow
ing
ques
tion
s:
a.H
ow lo
ng
does
it t
ake
for
the
pass
enge
r w
alki
ng
on t
he
side
wal
k to
get
from
on
e en
d of
the
side
wal
k to
th
e ot
her
en
d?
b.H
ow m
uch
tim
e do
es th
e pa
ssen
ger
save
by
taki
ng
the
mov
ing
side
-
wal
k in
stea
d of
wal
kin
g al
ongs
ide
it?
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
3
Honors Physics 2008–2009 Mr. Strong

28
Forc
es a
nd th
e La
ws
ofM
otio
n
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
4
Chap
ter 4
21
1.A
cra
te r
ests
on
the
hori
zont
al b
ed o
fa p
icku
p tr
uck.
For
each
sit
uati
on d
e-
scri
bed
belo
w,i
ndic
ate
the
mot
ion
ofth
e cr
ate
rela
tive
to th
e gr
ound
,the
mot
ion
ofth
e cr
ate
rela
tive
to th
e tr
uck,
and
whe
ther
the
crat
e w
ill h
it th
e
fron
t wal
l oft
he tr
uck
bed,
the
back
wal
l,or
nei
ther
.Dis
rega
rd fr
icti
on.
a.St
arti
ng
at r
est,
the
tru
ck a
ccel
erat
es to
th
e ri
ght.
b.T
he
crat
e is
at
rest
rel
ativ
e to
th
e tr
uck
wh
ile t
he
tru
ck m
oves
to t
he
righ
t w
ith
a c
onst
ant
velo
city
.
c.T
he
tru
ck in
item
b s
low
s do
wn
.
2.A
bal
l wit
h a
mas
s of
mis
th
row
n t
hro
ugh
th
e ai
r,as
sh
own
in t
he
figu
re.
HRW material copyrighted under notice appearing earlier in this book.
a.W
hat
is t
he
grav
itat
ion
al fo
rce
exer
ted
on t
he
ball
by E
arth
?
b.W
hat
is t
he
forc
e ex
erte
d on
Ear
th b
y th
e ba
ll?
c.If
the
surr
oun
din
g ai
r ex
erts
a fo
rce
on t
he
ball
that
res
ists
its
mot
ion
,
is t
he
tota
lfor
ce o
n t
he
ball
the
sam
e as
th
e fo
rce
calc
ula
ted
in p
art
a?
d.If
the
surr
oun
din
g ai
r ex
erts
a fo
rce
on t
he
ball
that
res
ists
its
mot
ion
,
is t
he
grav
itat
iona
l for
ce o
n t
he
ball
the
sam
e as
th
e fo
rce
calc
ula
ted
in
part
a?
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s223.
Two
bloc
ks o
fm
asse
s m
1an
dm
2,r
espe
ctiv
ely,
are
plac
ed in
con
tact
wit
h
each
oth
er o
n a
sm
ooth
,hor
izon
tal s
urf
ace.
A c
onst
ant
hor
izon
tal f
orce
F
to t
he
righ
t is
app
lied
to m
1.A
nsw
er t
he
follo
win
g qu
esti
ons
in te
rms
of
F,m
1,an
dm
2.
a.W
hat
is t
he
acce
lera
tion
of
the
two
bloc
ks?
b.W
hat
are
th
e h
oriz
onta
l for
ces
acti
ng
on m
2?
c.W
hat
are
th
e h
oriz
onta
l for
ces
acti
ng
on m
1?
d.W
hat
is t
he
mag
nit
ude
of
the
con
tact
forc
e be
twee
n t
he
two
bloc
ks?
4.A
ssu
me
you
hav
e th
e sa
me
situ
atio
n a
s de
scri
bed
in it
em 3
,on
ly t
his
tim
e th
ere
is a
fric
tion
al fo
rce,
F k,b
etw
een
th
e bl
ocks
an
d th
e su
rfac
e.
An
swer
th
e fo
llow
ing
ques
tion
s in
term
s of
F,F k
,m1,
and
m2.
a.W
hat
is t
he
acce
lera
tion
of
the
two
bloc
ks?
b.W
hat
are
th
e h
oriz
onta
l for
ces
acti
ng
on m
2?
c.W
hat
are
th
e h
oriz
onta
l for
ces
acti
ng
on m
1?
d.W
hat
is t
he
mag
nit
ude
of
the
con
tact
forc
e be
twee
n t
he
two
bloc
ks?
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
4
Honors Physics 2008–2009 Mr. Strong

29
Wor
k an
d En
ergy
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
5
Chap
ter 5
27
1.A
bal
l has
a m
ass
of3
kg.W
hat
is t
he
wor
k do
ne
on t
his
bal
l by
the
grav
i-
tati
onal
forc
e ex
erte
d by
Ear
th if
the
ball
mov
es 2
m a
lon
g ea
ch o
fth
e
follo
win
g di
rect
ion
s?
a.do
wnw
ard
(alo
ng
the
forc
e)
b.u
pwar
d (o
ppos
ite
the
forc
e)
2.A
sto
ne
wit
h a
mas
s of
mis
th
row
n o
ffa
build
ing.
As
the
ston
e pa
sses
poin
tA
,it
has
a s
peed
ofv A
at a
n a
ngl
e of
qto
th
e h
oriz
onta
l.T
he
ston
e
then
tra
vels
a v
erti
cal d
ista
nce
hto
poi
nt
B,w
her
e it
has
a s
peed
vB
.
HRW material copyrighted under notice appearing earlier in this book.
a.W
hat
is t
he
wor
k do
ne
on t
he
ston
e by
th
e gr
avit
atio
nal
forc
e du
e to
Ear
th w
hile
th
e st
one
mov
es fr
om A
to B
?
b.W
hat
is t
he
chan
ge in
th
e ki
net
ic e
ner
gy o
fth
e st
one
as it
mov
es fr
om
Ato
B?
c.W
hat
is t
he
spee
d v B
ofth
e st
one
in te
rms
ofv A
,g,a
nd
h?
d.D
oes
the
chan
ge in
th
e st
one’
s sp
eed
betw
een
Aan
dB
depe
nd
on t
he
mas
s of
the
ston
e?
e.D
oes
the
chan
ge in
th
e st
one’
s sp
eed
betw
een
Aan
dB
depe
nd
on t
he
angl
e q
?
h
A
Bθ
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s283.
An
em
pty
coff
ee m
ug
wit
h a
mas
s of
0.40
kg
gets
kn
ocke
d of
fa
tabl
etop
0.75
m a
bove
th
e fl
oor
onto
th
e se
at o
fa
chai
r 0.
45 m
abo
ve t
he
floo
r.
Ass
um
e th
at t
he
grav
itat
ion
al p
oten
tial
en
ergy
,PE
g,is
mea
sure
d u
sin
g
the
floo
r as
th
e ze
ro e
ner
gy le
vel.
a.W
hat
is t
he
init
ial g
ravi
tati
onal
pot
enti
al e
ner
gy a
ssoc
iate
d w
ith
th
e
mu
g’s
posi
tion
on
th
e ta
ble?
b.W
hat
is t
he
fin
al g
ravi
tati
onal
pot
enti
al e
ner
gy a
ssoc
iate
d w
ith
th
e
mu
g’s
posi
tion
on
th
e ch
air
seat
?
c.W
hat
was
th
e w
ork
don
e by
th
e gr
avit
atio
nal
forc
e as
it fe
ll fr
om t
he
tabl
e to
th
e ch
air?
d.Su
ppos
e th
at z
ero
leve
l for
th
e en
ergy
was
tak
en to
be
the
ceili
ng
of
the
room
rat
her
th
an t
he
floo
r .W
ould
th
e an
swer
s to
item
s a
to c
be
the
sam
e or
dif
fere
nt?
4.A
car
ton
of
shoe
s w
ith
a m
ass
ofm
slid
es w
ith
an
init
ial s
peed
ofv i
m/s
dow
n a
ram
p in
clin
ed a
t an
an
gle
of23
°to
the
hor
izon
tal.
Th
e ca
rton
’s
init
ial h
eigh
t is
hi,
and
its
fin
al h
eigh
t is
hf,
and
it t
rave
ls a
dis
tan
ce o
f
ddo
wn
th
e ra
mp.
Th
ere
is a
fric
tion
al fo
rce,
F k,b
etw
een
th
e ra
mp
and
the
cart
on.
a.W
hat i
s th
e in
itia
l mec
han
ical
en
ergy
,ME
i,of
the
cart
on?
(Hin
t:
App
ly th
e la
w o
fco
nse
rvat
ion
of
ener
gy.)
b.Ifm
is t
he
coef
fici
ent
offr
icti
on b
etw
een
th
e ra
mp
and
the
cart
on,
wh
at is
Fk?
c.E
xpre
ss t
he
fin
al s
peed
,vf,
ofth
e ca
rton
in te
rms
ofv i
,g,d
,an
dm.
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
5
Honors Physics 2008–2009 Mr. Strong

30
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s32
Mom
entu
m a
nd C
ollis
ions
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
6
1.A
pit
cher
th
row
s a
soft
ball
tow
ard
hom
e pl
ate.
Th
e ba
ll m
ay b
e h
it,s
end-
ing
it b
ack
tow
ard
the
pitc
her
,or
it m
ay b
e ca
ugh
t,br
ingi
ng
it to
a s
top
in
the
catc
her
’s m
itt.
a.C
ompa
re t
he
chan
ge in
mom
entu
m o
fth
e ba
ll in
th
ese
two
case
s.
b.D
iscu
ss t
he
mag
nit
ude
of
the
impu
lse
on t
he
ball
in t
hes
e tw
o ca
ses.
c.In
th
e sp
ace
belo
w,d
raw
a v
ecto
r di
agra
m fo
r ea
ch c
ase,
show
ing
the
init
ial m
omen
tum
of
the
ball,
the
impu
lse
exer
ted
on t
he
ball,
and
the
resu
ltin
g fi
nal
mom
entu
m o
fth
e ba
ll.
2.a.
Usi
ng
New
ton’
s th
ird
law
,exp
lain
why
th
e im
puls
e on
on
e ob
ject
in a
colli
sion
is e
qual
in m
agn
itu
de b
ut
oppo
site
in d
irec
tion
to t
he
im-
puls
e on
th
e se
con
d ob
ject
.
b.E
xten
d yo
ur
disc
uss
ion
of
impu
lse
and
New
ton’
s th
ird
law
to t
he
case
ofa
bow
ling
ball
stri
kin
g a
set
of10
bow
ling
pin
s.
HRW material copyrighted under notice appearing earlier in this book.
HRW material copyrighted under notice appearing earlier in this book.
Chap
ter 6
33
3.St
arti
ng
wit
h t
he
con
serv
atio
n o
fto
tal m
omen
tum
,pf
=p
i,sh
ow
that
th
e fi
nal
vel
ocit
y fo
r tw
o ob
ject
s in
an
inel
asti
c co
llisi
on is
v f=
m1m +1 m
2
v 1,i
+ m
1m +2 m2
v 2
,i.
4.Tw
o m
ovin
g bi
lliar
d ba
lls,e
ach
wit
h a
mas
s of
M,u
nde
rgo
an e
last
ic
colli
sion
.Im
med
iate
ly b
efor
e th
e co
llisi
on,b
all A
is m
ovin
g ea
st a
t
2 m
/s a
nd
ball
B is
mov
ing
east
at
4 m
/s.
a.In
term
s of
M,w
hat i
s th
e to
tal m
omen
tum
(m
agn
itu
de a
nd
dire
c-
tion
) im
med
iate
ly b
efor
e th
e co
llisi
on?
b.T
he
fin
al m
omen
tum
,M(v
A,f
+v B
,f),
mu
st e
qual
th
e in
itia
l mom
en-
tum
.If
the
fin
al v
eloc
ity
ofba
ll A
incr
ease
s to
4 m
/s e
ast
beca
use
of
the
colli
sion
,wh
at is
th
e fi
nal
mom
entu
m o
fba
ll B
?
c.Fo
r ea
ch b
all,
com
pare
th
e fi
nal
mom
entu
m o
fth
e ba
ll to
th
e in
itia
l
mom
entu
m o
fth
e ot
her
ball.
Th
ese
resu
lts
are
typi
cal o
fh
ead-
on
elas
tic
colli
sion
s.W
hat
gen
eral
izat
ion
abo
ut
hea
d-on
ela
stic
col
lisio
ns
can
you
mak
e?
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
6
Honors Physics 2008–2009 Mr. Strong
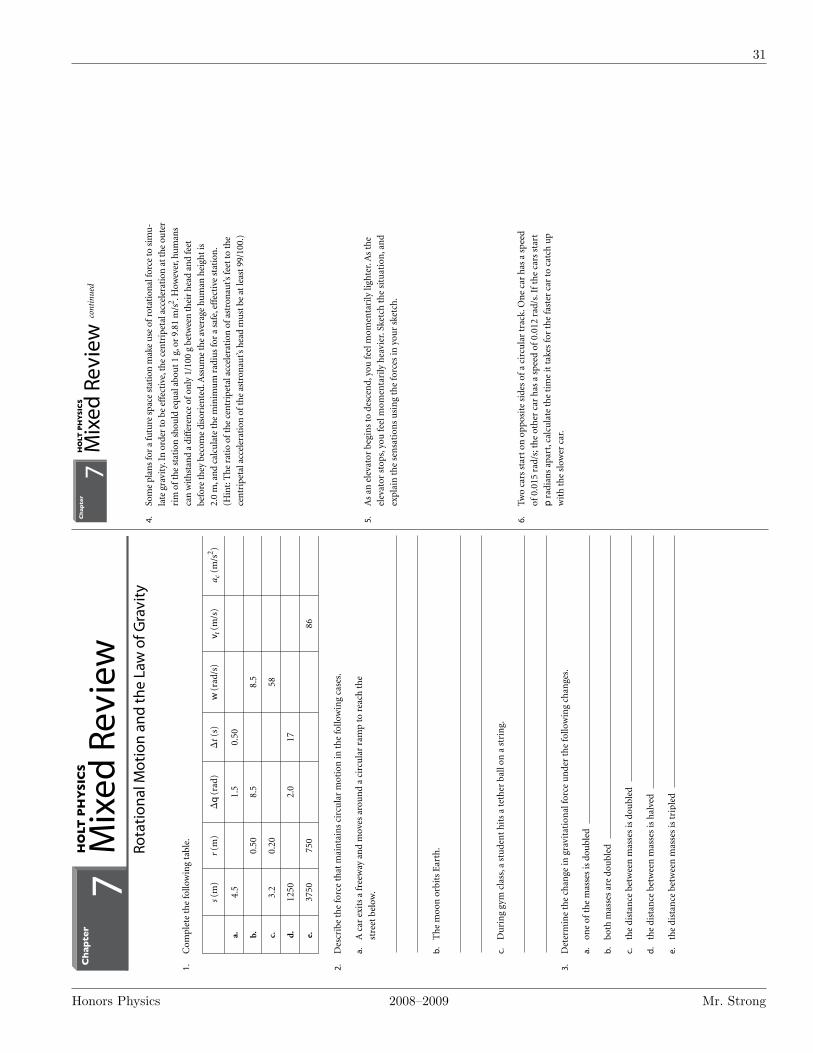
31HRW material copyrighted under notice appearing earlier in this book.
Rota
tiona
l Mot
ion
and
the
Law
ofG
ravi
ty
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
7
Chap
ter 7
37
1.C
ompl
ete
the
follo
win
g ta
ble.
s(m
)r(
m)
q(r
ad)
t(s)
w(r
ad/s
)v t
(m/s
)a c
(m/s
2 )
a.4.
51.
50.
50
b.5.8
5.805.0
c.85
02.02.3
d.
1250
2.0
17
e.68
0570573
2.D
escr
ibe
the
forc
e th
at m
ain
tain
s ci
rcu
lar
mot
ion
in t
he
follo
win
g ca
ses.
a.A
car
exi
ts a
free
way
an
d m
oves
aro
un
d a
circ
ula
r ra
mp
to r
each
th
e
stre
et b
elow
.
b.T
he
moo
n o
rbit
s E
arth
.
c.D
uri
ng
gym
cla
ss,a
stu
den
t h
its
a te
ther
bal
l on
a s
trin
g.
3.D
eter
min
e th
e ch
ange
in g
ravi
tati
onal
forc
e u
nde
r th
e fo
llow
ing
chan
ges.
a.on
e of
the
mas
ses
is d
oubl
ed
b.bo
th m
asse
s ar
e do
ubl
ed
c.th
e di
stan
ce b
etw
een
mas
ses
is d
oubl
ed
d.th
e di
stan
ce b
etw
een
mas
ses
is h
alve
d
e.th
e di
stan
ce b
etw
een
mas
ses
is t
ripl
ed
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s384.
Som
e pl
ans
for
a fu
ture
spa
ce s
tati
on m
ake
use
ofro
tati
onal
forc
e to
sim
u-
late
gra
vity
.In
ord
er to
be
effe
ctiv
e,th
e ce
ntr
ipet
al a
ccel
erat
ion
at t
he o
uter
rim
oft
he s
tati
on s
houl
d eq
ual a
bout
1 g
,or
9.81
m/s
2 .How
ever
,hum
ans
can
wit
hsta
nd
a di
ffer
ence
ofo
nly
1/1
00 g
bet
wee
n th
eir
head
an
d fe
et
befo
re th
ey b
ecom
e di
sori
ente
d.A
ssum
e th
e av
erag
e hu
man
hei
ght i
s
2.0
m,a
nd
calc
ulat
e th
e m
inim
um r
adiu
s fo
r a
safe
,eff
ecti
ve s
tati
on.
(Hin
t:T
he r
atio
oft
he c
entr
ipet
al a
ccel
erat
ion
ofa
stro
nau
t’s fe
et to
the
cen
trip
etal
acc
eler
atio
n o
fthe
ast
ron
aut’s
hea
d m
ust b
e at
leas
t 99/
100.
)
5.A
s an
ele
vato
r be
gin
s to
des
cen
d,yo
u fe
el m
omen
tari
ly li
ghte
r.A
s th
e
elev
ator
sto
ps,y
ou fe
el m
omen
tari
ly h
eavi
er.S
ketc
h t
he
situ
atio
n,a
nd
expl
ain
th
e se
nsa
tion
s u
sin
g th
e fo
rces
in y
our
sket
ch.
6.Tw
o ca
rs s
tart
on
opp
osit
e si
des
ofa
circ
ula
r tr
ack.
On
e ca
r h
as a
spe
ed
of0.
015
rad/
s;th
e ot
her
car
has
a s
peed
of
0.01
2 ra
d/s.
Ifth
e ca
rs s
tart
pra
dian
s ap
art,
calc
ula
te t
he
tim
e it
tak
es fo
r th
e fa
ster
car
to c
atch
up
wit
h t
he
slow
er c
ar.
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
7
Honors Physics 2008–2009 Mr. Strong

32
Rota
tiona
l Equ
ilibr
ium
and
Dyn
amic
s
Mix
ed R
evie
wH
OLT
PH
YS
ICS
Ch
apte
r
8
Chap
ter 8
43
1.a.
On
som
e do
ors,
the
door
knob
is in
th
e ce
nte
r of
the
door
.Wh
at
wou
ld a
phy
sici
st s
ay a
bou
t th
e pr
acti
calit
y of
this
arr
ange
men
t? W
hy
wou
ld p
hysi
cist
s de
sign
doo
rs w
ith
kn
obs
fart
her
from
th
e h
inge
?
b.H
ow m
uch
mor
e fo
rce
wou
ld b
e re
quir
ed to
ope
n t
he
door
from
th
e
cen
ter
rath
er t
han
from
th
e ed
ge?
2.Fi
gure
ska
ters
com
mon
ly c
han
ge t
he
shap
e of
thei
r bo
dy in
ord
er to
ach
ieve
spi
ns
on t
he
ice.
Exp
lain
th
e ef
fect
s on
eac
h o
fth
e fo
llow
ing
quan
titi
es w
hen
a fi
gure
ska
ter
pulls
in h
is o
r h
er a
rms.
a.m
omen
t of
iner
tia
b.an
gula
r m
omen
tum
c.an
gula
r sp
eed
3.Fo
r th
e fo
llow
ing
item
s,as
sum
e th
e ob
ject
s sh
own
are
in r
otat
ion
al e
quili
briu
m.
a.W
hat
is t
he
mas
s of
the
sph
ere
to t
he
righ
t?
b.W
hat
is t
he
mas
s of
the
port
ion
of
the
met
er-
stic
k to
th
e le
ft o
fth
e pi
vot?
(H
int:
20%
of
the
mas
s of
the
met
erst
ick
is o
n t
he
left
.How
mu
ch m
ust
be
on t
he
righ
t?)
HRW material copyrighted under notice appearing earlier in this book.
1.0
kg
0 cm
50 c
m25
cm
75 c
m10
0 cm
1.0
kg0 cm
50 c
m25
cm
75 c
m10
0 cm
HRW material copyrighted under notice appearing earlier in this book.
Hol
t Phy
sics
Sec
tion
Revi
ew W
orks
heet
s444.
A fo
rce
of25
N is
app
lied
to t
he
end
ofa
un
ifor
m r
od t
hat
is 0
.50
m lo
ng
and
has
a m
ass
of0.
75 k
g.
a.Fi
nd
the
torq
ue,
mom
ent o
fin
erti
a,an
d an
gula
r ac
cele
rati
on if
the
rod
is a
llow
ed to
piv
ot a
rou
nd
its
cen
ter
ofm
ass.
b.Fi
nd
the
torq
ue,
mom
ent o
fin
erti
a,an
d an
gula
r ac
cele
rati
on if
the
rod
is a
llow
ed to
piv
ot a
rou
nd
the
end,
away
from
the
appl
ied
forc
e.
5.A
sat
ellit
e in
orb
it a
rou
nd
Ear
th is
init
ially
at
a co
nst
ant
angu
lar
spee
d of
7.27
×10
–5ra
d/s.
Th
e m
ass
ofth
e sa
telli
te is
45
kg,a
nd
it h
as a
n o
rbit
al
radi
us
of4.
23 ×
107
m.
a.Fi
nd
the
mom
ent
ofin
erti
a of
the
sate
llite
in o
rbit
aro
un
d E
arth
.
b.Fi
nd
the
angu
lar
mom
entu
m o
fth
e sa
telli
te.
c.Fi
nd
the
rota
tion
al k
inet
ic e
ner
gy o
fth
e sa
telli
te a
rou
nd
Ear
th.
d.Fi
nd
the
tan
gen
tial
spe
ed o
fth
e sa
telli
te.
e.Fi
nd
the
tran
slat
ion
al k
inet
ic e
ner
gy o
fth
e sa
telli
te.
6.A
ser
ies
oftw
o si
mpl
e m
ach
ines
is u
sed
to li
ft a
133
00 N
car
to a
hei
ght
of3.
0 m
.Bot
h m
ach
ines
hav
e an
eff
icie
ncy
of
0.90
(90
per
cen
t).M
ach
ine
A m
oves
th
e ca
r,an
d th
e ou
tpu
t of
mac
hin
e B
is t
he
inpu
t to
mac
hin
e A
.
a.H
ow m
uch
wor
k is
don
e on
th
e ca
r?
b.H
ow m
uch
wor
k m
ust
be
don
e on
mac
hin
e A
in o
rder
to a
chie
ve t
he
amou
nt
ofw
ork
don
e on
th
e ca
r?
c.H
ow m
uch
wor
k m
ust
be
don
e on
mac
hin
e B
in o
rder
to a
chie
ve t
he
amou
nt
ofw
ork
from
mac
hin
e A
?
d.W
hat
is t
he
over
all e
ffic
ien
cy o
fth
is p
roce
ss?
HO
LT P
HY
SIC
S
Mix
ed R
evie
w co
ntin
ued
Ch
apte
r
8
Honors Physics 2008–2009 Mr. Strong

33
Mix
edRev
iew
Answ
ers
Sect
ion
Thre
e—Se
ctio
n Re
view
Wor
kshe
et A
nsw
ers
III–1
1.a.
2.2
×10
5s
b.3.
5×
107
mm
c.4.
3×
10−4
km
d.2.
2×
10−5
kg
e.6.
71×
1011m
g
f.8.
76×
10−5
GW
g.1.
753
×10
−1ps
2.a.
3
b.4
c.10
d.3
e.2
f.4
3.a.
4
b.5
c.3
4.a.
1.00
54;−
0.99
52;5
.080
×10
−3;
5.07
6×
10−3
b.4.
597
×10
7 ;3.8
66 ×
107 ;
1.54
6×
1014
;11.
58
5.15
.9 m
2
6.T
he g
raph
sho
uld
be a
str
aigh
t lin
e.
Chap
ter 1
Mix
ed R
evie
w
Hol
t Phy
sics
Sol
utio
n M
anua
lIII
–2
III
2.a.
v f=
a(∆t
)
b.v f
=v i
+a(
∆t);
∆x=
1 2 (v i
+v f
)∆t
or∆x
=v i
(∆t)
+1 2 a
(∆t)
2
1.a.
t 1=
d 1/v
1;t 2
=d 2
/v2;t
3=
d 3/v
3
b.to
tal d
ista
nce
=d 1
+d 2
+d 3
c.to
tal t
ime
=t 1
+t 2
+t 3
3.
Tim
e in
terv
alTy
pe o
fmot
ion
v(m
/s)
a(m
/s2 )
Asp
eedi
ng
up
++
Bsp
eedi
ng
up
++
Cco
nst
ant
velo
city
+0
Dsl
owin
g do
wn
+−
Esl
owin
g do
wn
+−
.b
.a
.4
1 s
c.2
sTi
me
(s)
Posi
tion
(m)
v(m
/s)
a(m
/s2 )
14.
90
−9.8
1
20
−9.8
−9.8
1
3−1
4.7
−19.
6−9
.81
4−3
9.2
−29.
4−9
.81
Chap
ter 2
Mix
ed R
evie
w
Hol
t Phy
sics
Sol
utio
n M
anua
lIII
–4
1.a.
Th
e di
agra
m s
hou
ld in
dica
te t
he
rela
tive
dis
tan
ces
and
dire
ctio
ns
for
each
seg
men
t of
the
path
.
b.5.
0 km
,slig
htl
y n
orth
of
nor
thw
est
c.11
.0 k
m
2.a.
Th
e sa
me
b.Tw
ice
as la
rge
c.1.
58
3.a.
2.5
m/s
,in
th
e di
rect
ion
of
the
side
wal
k’s
mot
ion
b.1.
0 m
/s,i
n t
he
dire
ctio
n o
fth
e si
dew
alk’
s m
otio
n
c.4.
5 m
/s,i
n t
he
dire
ctio
n o
fth
e si
dew
alk’
s m
otio
n
d.2.
5 m
/s,i
n t
he
dire
ctio
n o
ppos
ite
to t
he
side
wal
k’s
mot
ion
e.4.
7 m
/s,q
=32
°
4.a.
4.0
×10
1se
con
ds
b.6.
0×
101
seco
nds
Chap
ter 3
Mix
ed R
evie
w
Sect
ion
Thre
e—Se
ctio
n Re
view
Wor
kshe
et A
nsw
ers
III–5
1.a.
at r
est,
mov
es to
th
e le
ft,h
its
back
wal
l
b.m
oves
to t
he
righ
t (w
ith
vel
ocit
y v)
,at
rest
,nei
ther
c.m
oves
to t
he
righ
t,m
oves
to t
he
righ
t,h
its
fron
t w
all
2.a.
mg,
dow
n
b.m
g,u
p
c.n
o
d.ye
s
3.a.
a=
m1
+F
m2
b.m
2a
c.F
−m
2a
=m
1a
d. m
1m +1 m2
F
4.a.
a= mF 1− +F mk
2
b.m
2a
−F k
c.F
−m
2a
−F k
=m
1a−
F k
d. m
1m +1 m2
(F
−F k
)
Chap
ter 4
Mix
ed R
evie
w
Hol
t Phy
sics
Sol
utio
n M
anua
lIII
–6
1.a.
60 J
b.−6
0 J
2.a.
mgh
b.m
gh
c.v B
=v A
2+
2gh
d.n
o
e.n
o
3.a.
2.9
J
b.1.
8 J
c.1.
2 J
d.a,
b:di
ffer
ent;
c:sa
me
4.a.
1 2 mv i
2+
mgh
i=
1 2 mv f
2+
mgh
f+
F kd
b.F k
=mm
g(co
s 23
°)
c.v f
= mv i
2+
2g(d
sin
23°−
mco
s23
°)
Chap
ter 5
Mix
ed R
evie
w
Sect
ion
Thre
e—Se
ctio
n Re
view
Wor
kshe
et A
nsw
ers
III–7
III
Copyright ©by Holt, Rinehart and Winston.All rights reserved.
1.a.
Th
e ch
ange
du
e to
th
e ba
t is
gre
ater
th
an t
he
chan
gedu
e to
th
e m
itt.
b.T
he
impu
lse
due
to t
he
bat
is g
reat
er t
han
th
e im
-pu
lse
due
to t
he
mit
t.
c.C
hec
k st
ude
nt
diag
ram
s.B
at:v
ecto
r sh
owin
g in
itia
lm
omen
tum
an
d a
larg
er v
ecto
r in
th
e op
posi
te d
i-re
ctio
n s
how
ing
impu
lse
ofba
t,re
sult
is t
he
sum
of
the
vect
ors.
Mit
t:ve
ctor
sh
owin
g in
itia
l mom
entu
man
d an
equ
al le
ngt
h v
ecto
r sh
owin
g im
puls
e of
mit
t,re
sult
is t
he
sum
,wh
ich
is e
qual
to z
ero.
2.a.
Th
e im
puls
es a
re e
qual
,bu
t op
posi
te fo
rces
,occ
ur-
rin
g du
rin
g th
e sa
me
tim
e in
terv
al.
b.T
he
tota
l for
ce o
n t
he
bow
ling
ball
is t
he
sum
of
forc
es o
n p
ins.
Th
e fo
rce
on t
he
pin
s is
equ
al b
ut
op-
posi
te o
fto
tal f
orce
on
bal
l.
3.m
1v1i
+m
2v2i
=(m
1+
m2)v f
;
m1v
1i/(
m1
+m
2)+
m2v
2i/(
m1
+m
2)=v f
4.a.
M(6
m/s
)
b.2
m/s
c.ob
ject
s tr
ade
mom
entu
m;i
fm
asse
s ar
e eq
ual
,ob-
ject
s tr
ade
velo
citi
es
Chap
ter 6
Mix
ed R
evie
w
Hol
t Phy
sics
Sol
utio
n M
anua
lIII
–8
1.a.
3.0,
3.0,
9.0,
27
b.4.
3,1.
0,4.
3,37
c.16
,0.2
8,11
,6.0
×10
2
d.63
0,0.
11,7
4,8.
7
e.5.
0,44
,0.1
1,9.
9
2.a.
fric
tion
b.gr
avit
atio
nal
forc
e
c.te
nsi
on in
str
ing
3.a.
dou
bled
b.qu
adru
pled
c.re
duce
d to
1 4
d.qu
adru
pled
e.re
duce
d to
1 9
4.19
0 m
5.St
uden
t dia
gram
s sh
ould
sho
w v
ecto
rs fo
r w
eigh
t an
dn
orm
al fo
rce
from
ele
vato
r;de
scen
t sho
uld
show
nor
mal
forc
e le
ss th
an w
eigh
t;st
oppi
ng
shou
ld s
how
nor
mal
forc
e gr
eate
r th
an w
eigh
t;“w
eigh
tles
snes
s”fe
elin
g is
due
to a
ccel
erat
ion
.
6.10
50 s
(17
.5 m
in)
Chap
ter 7
Mix
ed R
evie
w
Honors Physics 2008–2009 Mr. Strong

34
Sect
ion
Thre
e—Se
ctio
n Re
view
Wor
kshe
et A
nsw
ers
III–9
1.a.
Ifth
e kn
ob is
fart
her
from
th
eh
inge
,tor
que
is in
crea
sed
torq
ue
for
a gi
ven
forc
e.
b.tw
ice
as m
uch
2.a.
Rot
atio
nal
iner
tia
is r
edu
ced.
b.A
ngu
lar
mom
entu
m r
emai
ns
the
sam
e.
c.A
ngu
lar
spee
d in
crea
ses.
3.a.
2.0
kg
b.0.
67 k
g
4.a.
6.2
N• m
,0.0
16 k
g• m
2 ,39
0 ra
d/s2
b.12
N• m
,0.0
62 k
g•m
2 ,190
rad
/s2
5.a.
8.1
×10
16kg
• m2
b.5.
9×
1012
kg• m
2 /s
c.2.
1×
108
J
d.3.
1×
103
m/s
e.2.
2×
108
J
6.a.
4.0
×10
4J
b.4.
4×
104
J
c.4.
9×
104
J
d.0.
81
Chap
ter 8
Mix
ed R
evie
w
Honors Physics 2008–2009 Mr. Strong