Embed Size (px)
Citation preview

Journal�
of ComputationalPhysics173,�
730–764(2001)
doi:10.1006/jcph.2001.6910,�
availableonlineathttp://www.idealibrary.comon
F�
acundoMemoli� � andGuillermoSapiro��Instituto
�deIngenierıa Electrica,Universidaddela Republica,Montevideo,Uruguay; Electrical
�and� ComputerEngineering, University of Minnesota,Minneapolis,Minnesota55455
E-mail:
[email protected];[email protected]
Received March26,2001;revisedAugust6, 2001
An�
algorithmfor thecomputationallyoptimalconstructionof intrinsic weighteddistance
�functionson implicit hyper-surfacesis introducedin this paper. Thebasic
idea�
is to approximatethe intrinsic weighteddistanceby the Euclideanweighteddistance
�computedin abandsurroundingtheimplicit hyper-surfacein theembedding
space,� therebyperformingall the computationsin a Cartesiangrid with classicaland� efficientnumerics.Basedonwork ongeodesicsonRiemannianmanifoldswithboundaries,
�we boundtheerrorbetweenthe two distancefunctions.We show that
this�
error is of thesameorderasthetheoreticalnumericalerror in computationallyoptimal,� Hamilton–Jacobi-based,algorithmsfor computingdistancefunctions inCartesian
�grids.Therefore,wecanusethesealgorithms,modifiedtodealwith spaces
with� boundaries,andobtainalsofor thecaseof intrinsicdistancefunctionsonimplicithyper
�-surfacesacomputationallyefficient technique.Theapproachcanbeextended
to�
solve a moregeneralclassof Hamilton–Jacobiequationsdefinedon theimplicitsurf� ace,following thesameideaof approximatingtheirsolutionsby thesolutionsinthe
�embeddingEuclideanspace.Theframework hereintroducedtherebyallows for
the�
computationsto beperformedonaCartesiangrid with computationallyoptimalalgorithms,� in spiteof thefact that thedistanceandHamilton–Jacobiequationsareintrinsic
�to theimplicit hyper-surface. c��
2001AcademicPress
Key Words: implicit hyper-surfaces;distancefunctions; geodesics;Hamilton–Jacobi
�equations;fastcomputations.
1. INTRODUCTION
Computing�
distancefunctionshasmany applicationsin numerousareasincludingmath-ematical� physics,imageprocessing,computervision, robotics,computergraphics,com-putational� geometry, optimalcontrol,andbrain research.In addition,having thedistance
730�
0021-9991/01$35.00Copyright c
�2001by AcademicPress
All rightsof reproductionin any form reserved.

DIST
ANCE FUNCTIONSAND GEODESICS 731!
function"
from a seedto a targetpoint, it is straightforward to computethecorrespondinggeodesic# path,sincethis is given by the gradientdirectionof the distancefunction,backpropagating� from thetargettowardtheseed(seefor example[18]). Geodesicsareusedfore� xamplefor pathplanningin robotics[35]; brainflatteningandbrainwarpingin compu-tational
$neuroscience[56, 57, 60, 61, 68]; crests,valleys, andsilhouettescomputationsin
computer% graphicsandbrainresearch[7, 30,62]; meshgeneration[64]; andmany applica-tions
$in mathematicalphysics.Distancefunctionsarealsoveryimportantin optimalcontrol
[59] andcomputationalgeometryfor computationssuchasVoronoidiagramsandskeletons[48]. It is thenof extremeimportancetodevelopefficienttechniquesfor theaccurateandfastcomputations% of distancefunctions.It is thegoalof thispaperto presentacomputationallyoptimal& techniquefor thecomputationof intrinsic weighteddistancefunctionson implicithyper-surfaces.1 It is well known already, andit will be furtherdetailedbelow, that theseweighted' distancescanbeobtainedasthesolutionof simpleHamilton–Jacobiequations.W
(e will alsoshow that the framework herepresentedcanbe appliedto a larger classof
Hamilton–Jacobi)
equationsdefinedonimplicit surfaces.Wealsodiscusstheapplicationofour& proposedframework to other, nonimplicit,surfacerepresentations.
1.1. DistanceFunction Computation and Its Hamilton–JacobiFormulation
Beforeproceeding,let usfirst formally definetheconceptof intrinsic weighted' distanceson& implicit hyper
*-surfaces.Let + be
,a (codimension1) hyper-surfacein IR
- d.
defined/
asthezero level setof a function 0 : IRd
. 1IR. That is, 2 is given by 3 x4 5 IRd
.: 6 7 x4 8 9 0
: ;.
W(
e assumefrom now on that < is=
a signeddistancefunction to the surface > . (This isnot a limitation, sinceaswe will discusslater, both explicit andimplicit representationscan% be transformedinto this form.) Our goal is, for a given point p? @ A , to computetheintrinsic
=gB -weighteddistancefunctiond
C gDE F p? G x4 H for"
all desiredpointsx4 I J K 2 NoteL
thatwearereferringto the intrinsic gB -distance,that is, the geodesicdistanceon the RiemannianmanifoldM N O P gB 2II
- Q(II
-standsfor the R dC S
1T U V dC W1X identity
=matrix) and not on the
embedding� Euclideanspace.For a given positive weightgB defined/
on thesurface(we areconsidering% only isotropicmetricsfor now), the gB -distanceon Y (that coincideswith thegeodesic# distanceof theRiemannianmanifold Z [ \ gB 2II ] ) i
^sgiven by
dC gD_ ` p? a x4 b cd inf
=epxf [ g ]
hL
igD j k l m n (1)
where'
L gD o p q rs b
agB t u v l w x y z{ |
l } ~ dlC
(2)
is=
the weightedlength functional defined/
for piecewise C1 curv% es � : [a� � b�
] � � , andCpx� [ � ] denotesthesetof curvespiecewiseC1 joining
�p? to
$x4 , traveling on � . In general,
1Although�
all the examplesin this paperaregoing to be reportedfor two-dimensionalsurfacesin 3D (heredenoted�
as3D surfaces),thetheoryis valid for generaldimensionhyper-surfaces,andit will bepresentedin thisgenerality� . A numberof applicationsdealwith higherdimensions.For example,for thegeneraltheoryof harmonicmaps,� in orderto dealwith mapsontogeneralopensurfaces,it is necessaryto havethisnotionof intrinsicdistance[41]. In addition,higherdimensionsmight appearin motionplanning,whenexplicitly assumingthattherobotisnotmodeledby apoint, therebyaddingadditionalconstraintsto its movements.
2�
Thiscancertainlybeextendedto any subsetof � .�

732!
MEMOLI AND SAPIRO
we' will considerthedefinitionto bevalid for any gB defined/
over thedomainthatthecurvemaytravel through.
W(
e needto computethis distancewhenall the concerningobjectsare representedindiscrete
/form in thecomputer. Computingminimal weighteddistancesandpathsin graph
representations� is anold problemthathasbeenoptimallysolvedby Dijkstra [21]. Dijkstrashowedanalgorithmfor computingthepathin O � n� log
�n� � operations,& wheren� is
=thenumber
of& nodesin thegraph.Theweightsaregiven on theedgesconnectingbetweenthegraphnodes,� andthealgorithmiscomputationallyoptimal.In theory,wecouldusethisalgorithmtocompute% theweighteddistanceandcorrespondingpathonpolygonal(notimplicit) surfaces,with' theverticesasthegraphnodesandtheedgestheconnectionsbetweenthem(see[33]).Theproblemis that theoptimalpathscomputedby this algorithmarelimited to travel onthe
$graphedges,giving only afirst approximationof thetruedistance.Moreover, Dijkstra’s
algorithmis notaconsistentone:it will notconverge to thetruedesireddistancewhenthegraph# andgrid is refined[42, 43]. Thesolutionto this problem,limited to Cartesiangrids,w' asdevelopedin [27, 51,52,59] (andrecentlyextendedby OsherandHelmsen,see[45]).Tsitsiklis [59] first describedan optimal-controltype of approach,while independentlySethian[51, 52] andHelmsen[27] bothdevelopedtechniquesbasedonupwindnumericalschemes.The solutionpresentedby theseauthorsis consistentandconvergesto the truedistance
/[49, 59], while keepingthe sameoptimal complexity of O � n� logn� � . Later this
w' ork was extendedin [32] for triangulatedsurfaces(seealso[7, 36] for relatedworksonnumericson non-Cartesiangrids).We shouldnotethat thealgorithmdevelopedin [32] iscurrently% developedonly for triangulatedsurfaceswith acutetriangles.Therefore,beforethe
$algorithmcanbeapplied,asaninitializationstepthesurfaceshavetobepreprocessedto
removeall obtusetrianglesor otherpolygonspresentin therepresentation[31]. Following[52], wecall thesefast
�marchingalgorithms.
Thebasicideabehindthecomputationallyoptimaltechniquesfor finding weighteddis-tances,
$meaningthesefastmarchingalgorithms,is tonotethatthedistancefunctionsatisfies
a Hamilton–Jacobipartial differentialequation(PDE) in the viscositysense;see,for ex-ample,[38, 50] for thegeneraltopicof distancefunctionsonRiemannianmanifolds(andanice� mathematicaltreatment),and[12,23,31,44,46,52] for theplanar(andmoreintuitive)case.% ThisHamilton–Jacobiequationis given by
� �d
C gD� � gB � (3)
where' � � is=
thegradientintrinsic to thesurface,anddC gD� is
=thegB -distancefrom agivenseed
point� to therestof themanifold.3
Thatis, wecantransformtheproblemof optimaldistancecomputationinto theproblemof& solvingaHamilton–Jacobiequation(recallthatgB is
=known, it is thegiven weight),also
knownastheEikonalequation.In ordertosolvethisequation,thecurrentstateof knowledgepermits� usto accuratelyandoptimally(in acomputationalsense)find (weighted)distanceson& Cartesiangridsaswell asonparticulartriangulatedsurfaces(aftersomepreprocessing,namelytheeliminationof obtusetriangles,see[6, 32]). Thegoalof thispaperis to extendthis
$to implicit hyper-surfaces.In otherwords,wewill show how to solvetheaboveEikonal
equation� for implicit hyper-surfaces .
3¡
Note¢
that £ ¤ anddg¥¦ becometheclassicalgradientanddistancerespectively for Euclideanspaces.

DIST
ANCE FUNCTIONSAND GEODESICS 733!
Recall§
thatalthoughall theapplicationsin this paperwill bepresentedfor 3D surfaces,the
$theoryis valid for any d
C-dimensionalhyper-surfaces,andwill thenbepresentedin this
generality# .
1.2. DistanceFunction and Geodesicson Implicit Surfaces
Themotivationsbehindextendingthedistancemapcalculationto implicit surfacesarenumerous:� (a) In many applications,surfacesarealreadygiven in implicit form, e.g.,[10,13,16,25,45,46,53,66,62], andthereis thenaneedto extendto this importantrepresen-tation
$thepreviouslymentionedfasttechniques.Wecouldof coursetriangulatetheimplicit
surface,eliminateobtusetriangles,andthenusetheimportantalgorithmproposedin [32].This is notadesirableprocessin generalwhentheoriginaldatais in implicit form, sinceitaffectsthedistancecomputationaccuracy becauseof errorsfrom thetriangulation,andalsoaddsthecomputationalcostof thetriangulationitself,triangulationthatmightnotbeneededby
,the specificapplication.If, for example,what it is neededis to computethe distance
between,
aseriesof pointsonthesurface,thecomputationalcostaddedby thetriangulationis
=unnecessary. Notethatfinding a triangulatedrepresentationof theimplicit surfaceis of
course% dimensionalitydependent,andaddstheerrorsof the triangulationprocess.More-o& ver, accuratetriangulationsthat ensurecorrectnessin the topologyarecomputationallye� xpensive, andonceagainthereis noreasonto performafull triangulationwhenwemightbe
,interestedjust in theintrinsicdistancebetweenafew pointsontheimplicit surface.(b) It
is=
ageneralagreementthatthework onimplicit representationsandCartesiangridsis morerobustwhendealingwith differentialcharacteristicsof thesurfaceandpartialdifferentialequations� on thissurface.NumericalanalysisonCartesiangridsis muchmorestudiedandsupportedby fundamentalresultsthantheworkonpolygonalsurfaces.It isevenrecognizedthat
$thereisnoconsensusonhow tocomputebasicdifferentialquantitiesover atriangulated
surface(see,for example,[22]), althoughthereis quiteanagreementfor implicit surfaces.Moreover, representinganhyper-surfacewith structuredelementssuchastrianglesis cer-tainly
$difficult for dimensionsother than 2 or 3. (c) If the computationof the distance
function"
is just a partof a generalalgorithmfor solvinga givenproblem,it is not elegant,accurate,norcomputationallyefficienttogobackandforth fromdifferentrepresentationsofthe
$surface.
Beforeproceeding,we shouldnote that althoughthe whole framework and theory ishere
*developedfor implicit surfaces,it is valid for othersurfacerepresentationsaswell
after preprocessing.This will be explainedanddiscussedlater in the paper(Section5).Moreover, we will later assumethat the embeddingis a distancefunction. This is not alimitation,
�sincemany algorithmsexist to transforma genericembeddingfunction into a
distance/
one;seealsoSection5. Therefore,the framework herepresentedcanbeappliedboth
,to implicit (naturally)andothersurfacerepresentationssuchastriangulatedones.
In order to computeintrinsic distanceson surfaces,a small but importantnumberoftechniques
$have beenreportedin theliterature.As mentionedbefore,in a very interesting
w' ork Kimmel andSethian[32] extendedthefastmarchingalgorithmto work on triangu-latedsurfaces.In its currentversion,thisapproachcanonly beusedwhendealingwith 3Dtriangulated
$surfacesandits extensionto dealwith higherdimensionsseemsveryinvolved.
Moreover, it canonly correctlyhandleacutetriangulations(therebyrequiringapreprocess-ing
=step).And of course,it doesn’t applyto implicit surfaceswithout somepreprocessing
(a triangulation).

734!
MEMOLI AND SAPIRO
Another¨
very interestingapproachto computingintrinsic distances,this time workingwith' implicit surfaces,wasintroducedin [16]. Thiswill befurtherdescribedbelow, but firstlet’
�s make somecommentson it. First, this is an evolutionary/iterative approach,whose
steadystategives thesolutionto thecorrespondingHamilton–Jacobiequation.Therefore,this
$approachis not computationallyoptimal for the classof Hamilton–Jacobiequations
discussed/
in thispaper. (Althoughwhenproperlyimplemented,thecomputationalcomplex-ity of this iterative schemeis thesameasin thefastmarchingmethodhereproposed,theinner
=loop is morecomplex, makingtheiterative algorithmslower.)4 Second,very careful
discretization/
mustbe doneto the equationproposedin [16] becauseof the presenceofintrinsic
=jumpfunctionsthatmightchangethezerolevel-set(i.e.,thesurface).Ontheother
hand,thenumericalimplementationis notnecessarilydonevia theutilizationof monotone©scª hemes, asrequiredby ourapproachandall thefastmarchingtechniquespreviouslymen-tioned
$(therebyhaving a theoreticalerror « ¬ ® x4 ¯ [19]), andbetteraccuracy might then
be,
obtained.In
°order to computethe intrinsic distanceon an implicit surface,we must thensolve
the$
correspondingHamilton–Jacobiequationpresentedbefore.In order to do this in acomputationally% efficient way, we needto extendthe fastmarchingideasin [27, 45, 51,52, 59], which assumea Cartesiangrid, to work in our case.Sincean implicit surfaceis representedin a Cartesiangrid, correspondingto theembeddingfunction, thefirst andmostM intuitive ideais thento attemptto solve the intrinsic Eikonal equationusing± the fast
�mar© ching technique.
$The first steptoward our goal is to expressall the quantitiesin the
intrinsic=
Eikonalequationby its implicit-extendedrepresentations.� Whatwe meanis thatthe
$intrinsic problem� (weconsidergB ² 1 for simplicity of exposition),
³ ´ µd
C ¶ ·x4 ¸ ¹ º 1 for p? » ¼
dC ½ ¾
p? ¿ À 0: Á (4)
with' p? Â Ã the$
seedpoint, is to beextendedto all IR- d
.(or at leastto abandsurroundingÄ ),
^andthederivativesareto betakentangentiallyto Å Æ Ç 0
: È. Consideringthentheprojection
of& theEuclideangradientontothetangentspaceof É to$
obtaintheintrinsicone,anddenotingby
,d
Cthe
$Euclideanextensionto theintrinsic distanced
C Ê, we have to numericallysolve, in
the$
embeddingCartesiangrid, theequation
Ë Ìd
C Íx4 Î Ï 2 Ð Ñ Ò d
C Óx4 Ô Õ Ö × Ø x4 Ù Ú 2 Û 1 for x4 Ü IRd
.d
C Ýl Þ p? ß ß à 0
: á (5)
where' l â p? ã is=
theray throughp? normal� to thelevel setsof ä .This is exactly the approachintroducedin [16], as discussedabove, to build-up the
e� volutionaryapproach,given by thePDE
åt æ sgª n ç è 0 é ê ë ì í î 2 ï ð ñ ò ó ô õ ö 2 ÷ 1ø ù 0
: ú(6)
where' û0 ü x4 ý þ ÿ � x4 � 0
: �is
=the initial valueof the evolving function,generallya step-like
4�
Thegeneralframework introducedin [16] is applicablebeyondtheHamilton–Jacobiequationsdiscussedinthis�
paper(seealso[8, 17]). Herewe limit thecomparisonbetweenthe techniquesto theequationswherebothapproaches� areapplicable.

DIST
ANCE FUNCTIONSAND GEODESICS 735!
function"
(convolved with the signum)that tells insidefrom outsideof the zerolevel-set.Onethenfindsd
C � � � � � � �.
Of course,in order to obtain a computationallyoptimal approach,we want to solvethe
$stationaryproblem(5), andnot its iterative counterpart(6). It turnsout that thebasic
requirements� for theconstructionof afastmarchingmethod,evenwith therecentextensionsin
=[45], do not hold for this equation.This can be explicitly shown, and hasalso been
hintedby Kimmel andSethianin their work on geodesicson surfacesgiven as graphsoffunctions.
" 5
To recap,the fast marchingapproachcannotbe directly applied to the computationof& intrinsic distanceson implicit surfacesdefinedon a Cartesiangrid (Eq. (5)), and thestateof the art in numericalanalysisfor this problemsaysthat in order to computein-trinsic
$distancesoneeitherhasto work with triangulatedsurfacesor hasto usethe iter-
ative approachmentionedabove. The problemswith both techniqueswere reportedbe-fore, and it is the goal of this paperto presenta third approachthat addressesall theseproblems.�
1.3. Our Contrib ution
Thebasicideaherepresentedis conceptuallyvery simple.We first considera small h�
of& fsetof � . That is, sincetheembeddingfunction � is=
a distancefunction,with � asitszerolevel set,we considerall pointsx4 in IR3 for which � � � x4 � � � h
�. This gives a region in
IRd.
with' boundaries.We thenmodify the (Cartesian)fastmarchingalgorithmmentionedabove for computingthe distancetransforminsidethis h
�-bandsurrounding� . Note that
hereall thecomputationsare,asin theworks in [27, 51, 52, 59], in a Cartesiangrid. Wethen
$usethis Euclideandistancefunction as an approximationof the intrinsic distance
on& � . In Section2 we show that theerrorbetweenthesetwo distances,underreasonableassumptionson the surface � , is of the sameorderasthe numericalerror introducedbythe
$fastmarchingalgorithmsin [27, 51, 52, 59].6 Therefore,
�whenadaptingthesealgo-
rithmsto work on Euclideanspaceswith boundaryadaptationdescribedin Section3, weobtain& an algorithm for the computationof intrinsic distanceson implicit surfaceswiththe
$samesimplicity, computationalcomplexity, andaccuracy as theoptimalfastmarching
techniques$
for computingEuclideandistancesonCartesiangrids.7 In°
Section3 wealsoex-plicitly� discussthenumericalerrorof our proposedtechnique.Examplesof thealgorithmhereproposedaregiven in Section4. SinceOsherandHelmsenhave recentlyshown thatthe
$fastmarchingalgorithmcanbe usedto solve additionalHamilton–Jacobiequations,
we' show that the framework hereproposedcanbe appliedto equationsfrom that classaswell; this is donein Section5. This sectionalsodiscussesthe useof the frameworkherepresentedfor nonimplicit surfaces.Finally, someconcludingremarksare given inSection6.
5�
Wehavealsobenefitedfrom privateconversationswith StanOsherandRonKimmel to confirmthisclaim.6
�In contrastwith works suchas[1, 47], wherean offset of this form is just usedto improve the complexity
of the level-setsmethod,in our casetheoffset is neededto obtaina smallerrorbetweenthecomputeddistancetransform�
andtherealintrinsicdistancefunction;seenext section.7
!Although in this paperwe dealwith the fastmarchingtechniques,othertechniquesfor computingdistance
functions"
on Cartesiangrids,e.g.,thefasttechniquereportedin [11] for uniform weights,couldbeusedaswell,since# thebasisof ourapproachis theapproximationof theintrinsicdistanceby anextrinsicone.

736!
MEMOLI AND SAPIRO
2.$
DISTANCE FUNCTIONS: INTRINSIC VS. EXTRINSIC
The�
goalof thissectionistopresenttheconnectionbetweentheintrinsicdistancefunctionandtheEuclideanfunctioncomputedinsideabandsurroundingthe(implicit) surface.Wewill' completelycharacterizethedifferencebetweenthesetwo functions,mainly basedonresults� on shortestpathson manifoldswith boundary. Theresultsherepresentedwill alsojustify
�the useof the Cartesianfastmarchingalgorithmsfor the computationof intrinsic
weighted' distanceson implicit surfaces.Recallthatwe aredealingwith a closedhyper-surface% in IRd
.represented� asthezero
level-setof adistancefunction & : IRd. '
IR. Thatis, ( ) * + , 0: -
. Ourgoalis to computea gB -weighteddistancemapon thissurfacefrom aseedpointq. / 0 .
Let
1h
23x4 5 6 B
7 8x4 9 h
� : ; <x4 = IR
- d.
: > ? @ x4 A B C h� D
be,
theh�
-ofE fsetof& F (hereB7 G
x4 H h� I
is=
theball centeredat x4 with' radiush�
).^
It is well knownthat
$for a smoothJ , K L h is also smoothif h
�is sufficiently small, seeAppendix A for
references.� Mh is
=thenamanifold© with smoothboundary.
Our computationalapproachis basedon approximatingthe solution of the intrinsicproblem� (d
C gDN O p? P is=
theintrinsic gB -weighteddistanceon Q )^
R Sd
C gDT U p? V W gB for"
p? X Yd
C gDZ [ q. \ ] 0: ^ (7)
by,
thatof theEuclidean_
(or extrinsic)^
one,
`d
C gDah
b c p? d e gB for p? f gh
dC gDh
hb i q. j k 0
: l (8)
where' gB is asmoothextensionof& gB in adomaincontainingm h, anddC gDn
hb o p? p is
=theEuclidean
gB -weighteddistancein q h.Ourgoalistobeabletocontrol,for pointson r , s dC gDt u d
C gDvh
b w Lx y z { |
with' h�
. Notethatwehavereplacedtheintrinsicgradient} ~ by,
theEuclideangradientandthe
$intrinsic distanced
C gD� � p? � on& the surfaceby the EuclideandistancedC gD�
hb � p? � in � h. We
ha*
ve thentransformedtheproblemof computinganintrinsic distanceinto theproblemofcomputing% adistancein anEuclideanmanifoldwith boundary.
W(
e will show thatundersuitable(andlikely) geometricconditionson � we' canindeedcontrol% � d
C gD� � dC gD�
hb � L � � � � with' h
�. In orderto materializethis,wefirst needto briefly discuss
the$
extensiongB andto review somebasicbackgroundmaterialon Riemannianmanifoldswith' boundary.
2.1.�
The Extensionof the Weight g�W
(e requirethat gB � � � gB , and that gB is
=smoothª andnonnegative within � h. Thereare
situationswhenonehasa readily availableextension,andothersin which the extensionhas
*to be“invented.” Wecall theformernatur� al extensionandthelattergB eneral extension.
Both�
cases,asarguedbelow, will providesmoothfunctionsgB .

DIST
ANCE FUNCTIONSAND GEODESICS 737!
In°
many applications,the weight gB : � � IR-
depends/
on the curvaturestructureof thehyper-surface. Denoting B� � � � : � � s Iª Rd
. �d
.the
$secondfundamentalform of , and¡ ¢
B£ ¤ ¥
x4 ¦ § the$
setof its eigenvalues,thismeansthat
gB ¨ x4 © ª F« ¬ ®
B ° x4 ± ² ³
where' F«
is=
agivenfunction.In thiscaseit is utterlynatur� al to$
takeadvantageof theimplicitrepresentationby notingthatB µ x4 ¶ · H ¸ ¹
Txº » ¼ x4 ½ for x4 ¾ ¿ , whereH À is theHessianof ÁandTx4  is thetangentspaceto à at x4 (see[37]). Thenatur� al e� xtensionthenbecomes
gB Ä x4 Å Æ F Ç H È ÉT
Êxº Ë Ì xº Í Î x4 Ï Ð x4 Ñ Ò
h Ó (9)
where' Ô Õ x4 Ö ×Ø Ù yÚ Û IRd.
: Ü Ý yÚ Þ ß à á x4 â ã äThisextensionis valid for å x4 æ IRd
.: ç è é x4 ê ë ì 1í î ï ð , whereñ ò absolutelyboundsall
principal� curvaturesof ó ; seeAppendixA.When
ôtheweightgõ cannotö bedirectlyextendedto bevalid for atubularneighborhoodof
the÷
hyper-surface,onehasto do that in a pedestrianway. Onesuchextensioncomesfrompropagatingø thevaluesof gõ alongthenormalsof ù in aconstantfashion;i.e.,
gõ ú xû ü ý gõ þ ÿ � � xû � � � xû � �h � (10)
where� � � � : IRd � �
standsfor the normalprojectiononto � . This extensionis welldefined
�andsmoothas long as thereis a uniquefoot
�in � for every xû in the domainof
the÷
desiredextension � . Takingh�
sufficiently smallwe canguaranteethat � � � h if� �
is�
smooth.SeeAppendixA for somedetails.In
�practice,thisextensioncanbeaccomplishedsolvingtheequation[14]
�t � sgn� � ! " # $ % & ' 0
(
with� initial conditionsgiven by any ) * + , 0( -
, suchthat . / 0 1 0( 2 3 4 5
gõ . Thengõ 6 7 8 9: ; < = > ? @ .
2.2.A
ShortestPathsand DistanceFunctions in Manif oldswith Boundary
Sincewe wantto approximatetheproblemof intrinsic distancefunctionsby a problemofB distancefunctionsin manifoldswith boundary, andto prove that the latter convergesto
÷the former, we needto review basicconceptson this subject.We will mainly include
resultsC from [2, 3, 63]. We areinterestedin theexistenceandsmoothnessof thegeodesiccurvö eson manifoldswith boundary, sinceour convergenceargumentsbelow dependonthese
÷properties.We will assumethroughoutthis sectionthat D E F mG H is a connectedand
completeRiemannianI
manifoldwith boundary(thiswill laterbecometheh�
-offset J h with�the
÷metric gõ 2II , whereII now standsfor thed
K Ld
Kidentitymatrix).
DEFINITION 2.1 Let pM N qO P Q , thenif dK R S T U V W
: X Y Z [ IR is thedistancefunctionin \ (with its metricmG ),
]a shortestpathbetweenpM andqO is apathjoining themsuchthat
its�
RiemannianlengthequalsdK ^ _
pM ` qO a .
Nob
w, sincec is complete, for every pair of points pM andqO there÷
existsa shortest� pathjoining
dthem;see[2]. Thefollowing resultsdealwith theregularityof this shortestpath.

738e
MEMOLI AND SAPIRO
FIG. 1. Thef
minimal pathis Cg 1,h but notC2
i.
THEOREM 2.1 Let j k l mG m ben
a C3 manifoldG with C1 boundaryn
B. ThenanyshortestpathM of o is C1.p
Whenô q r s
mG t is aflat manifold(i.e., u is acodimension0 subsetof IRd
andthemetricmG is
�isotropicandconstant),it is easyto seethatany shortest� pathmustv bea straightline
whene� ver it is in theinteriorof w , andashortestpathof theboundaryB when� it is there.This
xwill bethesituationfor usfrom now on.
It mightseemabit awkwardthatonecannotachieveahigherregularityclassthanC1 forthe
÷shortestpaths,evenby increasingtheregularityof y z B, butasimplecounterexample
will� convincethereader. Think of { as IR| 2 with� theopenunit discremoved (seeFig. 1),
andits Euclideanmetric.Theaccelerationin all theopensegment } AP~ is �0,(
andin all theopenB arc � P Q
� �is
� � �er ; that is, it pointsinwardandhasmodulus1. That is, even in most
simpleexamples,C2 regularity is not achievable.It is, however, very easyto checkthatinthis
÷case �� is
�actuallyLipsc
�hitz.
F�
or thegeneralsituation,in [3,39] theauthorsprovedthatshortestpathsdohaveLipsc�
hitzcontinuousfirst derivatives,whichmeansthatin factshortestpathsaretwicedifferentiablealmost� everywhereby
�Rademacher’sTheorem.Thisfactwill beof greatimportancebelow.
For a morecomprehensive understandingof the theoryof shortestpathsanddistancefunctions
�in Riemannianmanifoldswith boundary, see[2, 3,39,63] andreferencestherein.
2.3. ConvergenceResult for the Extrinsic DistanceFunction
Wô
enow show therelationbetweentheEuclideandistancein theband� h andtheintrinsicdistance
�in thesurface� . Below wewill denoted
K � �� dK 1� , andd
K �h
� �� dK 1�
h� .
Observation2.1. Sinceweassumetheimplicit surface� to÷
becompact,thecontinuousfunction
�d
K �: � � � � IR
|attainsits maximum.Therefore,we candefinethediameterof

DIST�
ANCE FUNCTIONSAND GEODESICS 739e
the÷
setas
diamK � � ¡¢ sup
p£ ¤ q ¥ ¦ dK § ¨
pM © qO ª « ¬
Observation2.2. Since ® ¯ ° h we� have that for every pair of points pM andqO in� ±
,d
K ²h
� ³ pM ´ qO µ ¶ dK · ¸
pM ¹ qO º , so in view of thepreviousobservationwehave
dK »
h� ¼ pM ½ qO ¾ ¿ diam
K À Á Â ÃpM Ä qO Å Æ Ç
Observation2.3. Sinceweareassuminggõ to÷
beasmoothextensionof gõ to÷
all È É Ê h
(we stressthe fact that the extensiondoesnot dependon h), gõ will� be Lipschitz in Ë ,andwe call K gÌ its associatedconstant.Further, we will denoteMgÌ ÍÎ maxÏ xÐ Ñ Ò Ó gõ Ô xû Õ andMgÌ Ö× supØ xÐ Ù Ú Û gõ Ü xû Ý .
Wô
eneedthefollowing Lemma�
whose� simpleproofweomit (see,for example,[18]).
LÞ
EMMA 2.1. Whena gõ -shortestpathtravelsthroughan interior region, its curvature isabsolutely� boundedby
Bß
gÌ àá supâxÐ ã ä å
æ çgõ è xû é ê
gõ ë xû ì íThe
xfollowing Lemmawill beneededin theproof of the theorembelow. Its proof canbe
foundin AppendixB.
LEMMA 2.2. Let f : [a� î bn
] ï IR bea C1 ð [a� ñ bn] ò function
�such that f ó is Lipschitz.Letô õ L
� ö ÷[a� ø b
n] ù denote
K(oneú of )
]f
� û’s� weakderivative(s� )
].p Then
b
af
� ü 2 ý xû þ dxK ÿ
f f� � b
a� b
af
� �xû � � � xû � dx
K �
Wô
e are now readyto presentone of the main resultsof this section.We boundtheerror� betweenthe intrinsic distanceon andthe Euclideanonein the offset h. As wewill� seebelow, in the mostgeneralcase,the error is of the orderh
� 1� 2 (h�
being�
half theofB fset width). We will later discussthat this is also the orderof the theoreticalerror forthe
÷numericalapproximationin fastmarchingmethods.Thatwill leadusto concludethat
ourB algorithmdoeskeeptheconvergenceratewithin thetheoreticallyproven orderfor fastmarchingv methods’numericalapproximation.However, for all practicalpurposes,theorderofB convergencein thenumericalschemesusedby fastmarchingmethodsis thatof h
�; see
[49]. We will alsoarguethat for all practicalpurposeswe canguaranteeno decayin theoB verallrateof convergence.WedeferthedetaileddiscussiononthistoafterthepresentationofB thegeneralboundbelow.
Tx
HEOREM 2.2. Let�
A and B be two pointson thesmoothhyper-surface� (seeFig. 2).
Let dgÌh � d
K g�h
� � A � B � and� dg� � dK g� � A � B � .p Then, for
�pointson thesurface� , we� havethat
for�
sufficientlysmallh
dK g� � d
K gÌh � h
� 12 C � h� �
diamK
S! " #
wher� e C $ h� %depends
Kon the global curvature structure of & and� on gõ , and� approachesa
constantwhenh ' 0 ((
it doesnotdependon A nor B, we� givea preciseformof C ( h� )in the
prM oof)].p

740e
MEMOLI AND SAPIRO
FIG. 2. Tf
ubularneighborhood.
Pr�
oof. LetÞ
dK
h * dK +
h� , A
- .B
ß / 0d
K 1 2d
K 3 4A
- 5B
ß 6; andlet 7 : [0 8 d
Kh] denotea 9 h gõ -distance
minimizing arc-lengthparameterizedpathbetweenA : ; < 0( =and B > ? @ dK h A , suchthatB CD E F 1. Let G H I J K L M N O P Q R S T U V W X Y be
�the orthogonalprojectionof Z ontoB [ .
This curve will be assmoothas \ for small enoughh�
; seeAppendixA. For sufficientlysmall h
�, the boundaryof ] h will� be smooth,since ^ is
�smoothand no shockswill be
generated_ (seenext sectionandAppendixA). Sowecanassumethat ` is�
C1 andthat ab is�
Lipschitz,sinceit is ashortestpathwithin asmoothRiemannianmanifoldwith boundary;seeSection2.2above.
It�
is evidentthat(this is asimplebut key observation)
L gÌ c d e f dK gÌ
h
g1hi d
K gÌj k 2lm L gÌ n o p qsince
(1) r s t h andgõ u v w gõ(2) x neednotbea gõ -shortestpathbetweenA andB onB y .
Wô
e thenhave
dK gÌz { d
K gÌh | } L~ gÌ � � � � L
~gÌ � � � � � � L~ gÌ � � � � L
~gÌ � � � �
� d
h�
0
�gõ � � � � �� � �
gõ � � � � �� ¡ dtK
¢ d
h�
0
£gõ ¤ ¥ ¦ § ¨© ª «
gõ ¬ ® ¯ °± ² ³ dtK ´ d
h
�0
µg¶ · ¸ ¹ º »¼ ½ ¾ g¶ ¿ À Á Â ÃÄ Å Æ dt
K
Ç d
h�
0g¶ È É Ê Ë Ì ÍÎ Ï Ð Ï ÑÒ Ó Ô dt
K Õ d
h�
0
Ög¶ × Ø Ù Ú g¶ Û Ü Ý Þ dt
K
ß Mà
gÌd
h
�0
á âã ä åæ çdt
K èK
égÌ
d
h�
0
ê ë ì í îdt
K
ï MgÌd
h
�0
ð ñ ò ó ô õ ö ÷ø ù ú û ü ý þ ÿ � � � H � � � � �� dtK
K gÌd
�h
�0
� � � � � � � � � �dt
K
� MgÌd
�h
�0
� � � � � � � � ! dtK "
h M#
gÌd
�h
�0
$H % & ' ( )* + dt
K ,K gÌ h d
#h -
W.
enow boundthefirst two termsat theendof theprecedingexpression.

DIST�
ANCE FUNCTIONSAND GEODESICS 741e
1. Wefirst boundthesecondtermin theprecedingexpression;thiswill beaningredientto
/theboundingof thefirst termaswell. Wehave
0H
1 2 3 4 5 67 8 9 sup: ;: < = > ? 1@ p£ :d
A Bp£ C D E F h G
HH
1 I JpM K L M N supO
p£ :dA P
p£ Q R S T hU maxV W X Y Z pM [ \ ] ^ _ ` pM a b c d
wheree f g pM h andi j pM k denotel
thelargestandthesmallesteigenvalueof H m n pM o , respectively.No
pw, aswe know from AppendixA, themaximumabsoluteeigenvalueof H
1 q rpM s , K
é tpM u ,
isv
boundedby
Ké w
pM x y z {1 | } ~ � pM � � � � �
wheree � � isv
themaximumabsoluteeigenvalueof H1 � � �
; thatis,
� � �sup�xÐ � � � max�
1� i � dA � � � i � H � � x� � � � �
wheree �i � ¡ standsfor the i -th eigenvalueof asymmetricmatrix.
Then¢
dA
h�
0
£H
1 ¤ ¥ ¦ §s¨ © © ª« ¬ s¨ ® ds
K ¯d
Kh
° ±1 ² h
# ³ ´ µ
2. Let usdefinethefunction f¶
: [0 · dK
h] ¸ IR, f¶ ¹
t º » ¼ ½ ¾ ¿ t À À . Thenformally Áf¶ Ât à ÄÅ Æ Ç È É
t Ê Ê Ë ÌÍ Î t Ï and f¶ Ð
t Ñ Ò H1 Ó Ô Õ Ö
t × × [ ØÙ Ú t Û Ü ÝÞ ß t à ] á â ã ä å æ t ç ç è ¨é ê t ë . Since ìí î ï ð isv
Lipschitz, and ñ is regular we can guaranteethat òf¶ ó ô õis also Lipschitz, so f
¶ ö ÷ øeù xists
almosteverywhere.Wewantto bound
dA
h�
0
ú ûf
¶ üt ý þ dt
K ÿ
W.
e note first that f¶ �
0� � �
f¶ �
dK
h � � 0,�
and � f¶ �
t � h#
, � f¶
t � � � � �1� h� � � Bß
gÌ for�
almosteù very t � [0 � d
Kh]. In fact,wehavethatfor thosesubintervalsof [0 � d
Kh] in whichtheshortest
path� travels through � � h, either f¶ �
t � h#
, or f¶ !
t " # $ h#
for the whole subinterval, andtherefore
/f
¶ %t & is
vconstantfor eachsubinterval, so f
¶ 't ( ) 0
�there.Ontheotherhand,when* is in the interior of + h, it is a g, -geodesic,so its accelerationis boundedby BgÌ , as we
ha-
veseenin Lemma2.1.Therefore,weconcludethat . f¶ /
t 0 1 2 1 H3 4 5 6 7t 8 8 [ 9: ; t < = >? @ t A ] B C B
ßgÌ .
CombiningD
all thiswehave thatfor almostevery t E [0 F dK
h],
Gf
¶ Ht I J K B
ßgÌ L supM N
: O P Q R 1S dA T
p£ U V W X hYZH
[ \ ]pM ^ [ _ ` a ] b c supd
p£ :dA e
p£ f g h i h j maxV k l m n pM o p q r s t pM u v w
andthegiven boundfollowsasbefore.
Applying Cauchy–Schwartzinequalityweobtain
dA
h�
0
x yf
¶ zt { | dt
K } ~d
Kh �
dA
h�
0
�f
¶2 � t � dt
K �

742e
MEMOLI AND SAPIRO
Nop
w usingLemma2.2:
d�
h�
0
�f
¶ 2 � t � dtK � �
f f¶ � d� h
�0 �
d�
h�
0f
¶f d
¶t � � d
�h
�0
f¶
f d¶
t
� d�
h�
0
�f
¶ � �f
¶ �dt
K � �d
Kh � h
� � �1 � h
� � � � BgÌ �
Finally�
,
d�
h�
0
� � � ¡ ¢ £ ¤¥ ¦ dtK § ¨
dK
h © h� ª «
1 ¬ h� ® ¯ BgÌ °
Using±
bothcomputedbounds,wefind that
dK g̲ ³ d
K gÌh ´ diam
K µ ¶ · ¸h
�MgÌ
¹ º1 » h
� ¼ ½ ¾ BgÌ ¿ MgÌ À h� Á Â
1 Ã h� Ä Å Æ K gÌ Ç h
� È É
(11)
From�
theprecedingLemmaweobtain:
CÊ
OROLLARY 2.1 FËor a givenpointq Ì Í
dK gÌÎ
h� Ï Ð qO Ñ Ò Ó Ô d
K gÌÕ Ö qO × Ø ÙL Ú Û Ü Ý hÞ 0ß à 0
á â
Remark.ã
Theä
rateof convergenceobtainedwith thetechniquesshown aboveis of orderåh
�. A quicklookover theproofof convergenceshowsthatthetermresponsiblefor theh
� 1æ 2
rateç is d�
h�
0 è éfê ët ì dt
K. All othertermshavethehigherorderof h
�. Supposewecanfind afinite
ícollectionî of (disjoint) intervals I
ïi ð ñ a� i ò b
ni ó suchthatsgnô õ öfê ÷
isø
constant( fê
isø
monotonic)withinù eachI i , ú N
ûi ü 1I i ý [0 þ d
Kh] ÿ whereù N
�is thecardinalityof thatcollectionof intervals,
and�f
ê �t � � 0
áfor t � [0 � d
Kh] � N
ûi � 1 I
ïi . Then,wecouldwrite
d�
h�
0
f
ê �t � dt
K � Nû
i � 1
sgnô � �fê � � �ai
� � bi� � bi
�ai
��f
ê �t � dt
K � Nû
i � 1
sgnô � �fê � !ai
� " bi� # $ f
ê %b
ni & ' f
ê (a� i ) *
+ Nû
i , 1
-f
ê .b
ni / 0 f
ê 1a� i 2 3 4
Nû
i 5 1
6 7f
ê 8b
ni 9 : ; < f
ê =a� i > ? @
A 2Nh�
since fê B
t C D E F G H t I I and J K L M traN
velsthrough O h PobtainingQ a higherrateof convergence,h
�. It is quiteconvincing thatcaseswhereN
� R ScanT be consideredpathological.We thenarguethat for all practicalpurposesthe rateofconT vergenceachieved is indeedh
�(at least).Moreover, for simplecaseslike a sphere(or
otherQ convex surfaces),it it veryeasytoshow explicitly thattheerroris (atleast)of orderh�
.8
Notwithstanding,U
we arecurrentlystudyingthespaceof surfacesandmetricsgV for whichweW canguaranteethat N
� X Y, andadvancesin this subjectwill bereportedelsewhere.
8Z
In[
this case,asin thecaseof convex surfaces,thegeodesicis composedof two straightlinesinsidetheband,tangent\
to its innerboundary, andageodesicon theinnerboundaryof theband;seeFig. 1.

DIST�
ANCE FUNCTIONSAND GEODESICS 743e
Thisä
showsthatwecanapproximatetheintrinsicdistancewith theEuclideanoneontheofQ fsetband ] h. Moreover, aswe will detailbelow, theapproximationerror is of thesameorderQ asthe theoreticalnumericalerror in fastmarchingalgorithms.Thereby, we canusefastalgorithmsin Cartesiangrids to computeintrinsic distances(on implicit/implicitizedsurfaces),enjoying their computationalcomplexity without affectingtheconvergencerategi^ ven by theunderlyingnumericalapproximationscheme.
3._
NUMERICAL IMPLEMENT ATION AND ITS THEORETICAL ERROR
In this sectionwe first discussthe simple modificationthat needsto be incorporatedinto
`the (Cartesian)fastmarchingalgorithmin orderto dealwith Euclideanspaceswith
manifoldswith boundary. We thenproposea way of estimatingthe (now discrete)offseth
�, andboundthetotalnumericalerrorof ouralgorithm,therebyshowing ourassertionthat
theN
errorwith ouralgorithmis of thesameorderastheoneobtainedwith thefastmarchingalgorithmfor Cartesiangrids(or triangulated3D surfaces).
Asa
statedbefore,we are dealingwith the numericalimplementationof the Eikonalequationb insidean open,bounded,andconnecteddomain c (this will later becometheofQ fset d h).
eThegeneralequation,whenP
� fxg h is
`theweight(it becomesgV for
iourparticular
case),T is given by
j kf
ê lxg m n o P
� pxg q r xg s t
fê u
r v w 0á x (12)
withW r theN
seedpoint. Note that following theresultsin theprevioussection,we arenowdealing
ywith theEikonalequationin Euclideanspace,andsotheEuclideangradientis used
above.Theupwindnumericalschemeto beusedfor thisequationis of theform z { xg 1 | } xg 2 ~� � � � � xg d
� � � xg � [49],
d�j
� �1 max� 2 � f
ê �pM � � mG j
� � 0á � � � �
xg � 2P� 2 � pM �
mG j� � min� � f
ê �pM � � xg �ej
� � � fê �
pM � � xg �ej� ¡ (13)
whereW fê
is`
thenumericallycomputedvalueof fê
fori
everypoint pM in`
thediscretedomain
¢ £ ¤ ¥ ¦xg § ¨© ª « ¬ Z
®xg ¯ °
Here, ±ej� withW j
² ³1 ´ 2 µ ¶ ¶ ¶ µ d
K, aretheelementsof thecanonicalbasisof IRd
�.
W·
e now describethe fastmarchingalgorithmfor solving the above equation.For thisweW follow thepresentationin [52]. For clarity wewrite down thealgorithmin pseudo-codeMform.
iDetailson theoriginal fastmarchingmethodon Cartesiangridscanbefoundin the
mentionedreferences.At all timestherearethreekindsof pointsunderconsideration:
¸ Narr¹
owBand. Thesepointshave to themassociatedanalreadyguessedvaluefor fê
,andareimmediateneighborsto thosepointswhosevaluehasalreadybeen“frozen.”º A
»live. Thesearethepointswhose f
¼v½ aluehasalreadybeenfrozen.

744e
MEMOLI AND SAPIRO
¾ F¿
ar Away. Thesearepoints that haven’t beenprocessedyet, so no tentative valuehasbeenassociatedto them.For that reason,they have f
¼ À Á, forcing themnot to be
consideredT aspartof theup-windingstencilin theGudunov’s Hamiltonian.Thestepsof thealgorithmincludethefollowing Initialization
Ã:
1. Set fÄ Å
0Æ
for every point belongingto theset[AÇ
live]. Thesearetheseedpoint(s)if they lie on the grid. If the seedis not a grid point, its correspondingNeighbors
¹ 9 aresetA
Çlive andaregiven an initial value f
Äsimply computedvia interpolation(taking into
accountthedistancefrom theneighborgrid pointsto theseedpoint).2. Find a tentative value of f
Äfor
ievery Neighbor
¹ofQ an A
Çlive pointÈ and tag each
Narr¹
owBand.3. Set f
Ä É Êfor all theremainingpointsin thediscretedomain.Ë Advance
-:
1. Beginningof loop:Let Ì pMminÍ Î be
Ïthepoint Ð [Narr
¹owBand] Ñ whichW takestheleast
v½ alueof fÄ
.2. Insertthepoint pM
minÍ toN
theset[Alive] andremove it from [Narr¹
owBand] Ò3. Tag as Neighbors
¹all thosepoints in the discretedomainthat canbe written in
theN
form pMminÍ Ó Ô xg Õej
� , andbelongto [Narr¹
owBand] Ö [F¿
arAway]. If a Neighbor¹
is`
in[FarAway], remove it from thatset([FarAway]) andinsertit to [Narr
¹owBand] ×
4.Ø
RecalculatefÄ
fori
all Neighbors¹
usingÙ Eq.(13)5. Set[Neighbor
¹] Ú emptyset.
6. Backto thebeginning(step1).
The boundaryconditionsare taken such that points beyond the discretedomain havef
Ä Û Ü.
Theconditionthatischeckedall thetime,andthatreallydefinesthedomainthealgorithmis
`working within, is the onethat determinesif a certainpoint qO is
`Neighbor
¹oQ fag iven
pointÈ pM thatN
belongsto the domain.The only thing onehasto do in order to make thealgorithmwork in thedomain Ý h specifiedby Þ xg ß IRd
�: à á â xg ã ä å h
� æis changetheway
theN
Neighbor¹
checkingT is done.Moreprecisely, weshouldcheck
qO ç Neighbor¹ è
pM é if`
f ê ë ì í î qO ï ð ñ h� ò
&& ó qO canT bewritten like pM ô õ xg öej� ÷ ø ù
theN
emphasisherebeingonthetest“ ú û ü qO ý þ ÿ h�
.” Wecouldalsoachievethesameeffectbygi� ving aninfinite weight to all pointsoutside � h; that is, we treattheoutsideof � h asanobstacle.� Therefore,with anextremelysimplemodificationto thefastmarchingalgorithm,we� make it work as well for distanceson manifoldswith boundary, and therefore,forintrinsic
�distanceson implicit surfaces.This is of coursesupportedby the convergence
resultsin theprevioussectionandtheanalysison thenumericalerrorpresentedbelow.
3.1.�
Bounding the Offset h�
W�
enow presentatechniquetoestimateh�
, thesizeof theoffsetof thehyper-surface that
actuallydefinesthecomputationaldomain � h. Theboundson h�
arevery simple.On onehand,weneedh
�to
belargeenoughsothattheupwindschemecanbeimplemented,meaning
that
h�
hasto belargeenoughto includethestencilusedin thenumericalimplementation.
9�
F or agrid point p� , any of its 2D-neighboringpointscanbewritten like p� � � x� i
� �e� i� .

DIST�
ANCE FUNCTIONSAND GEODESICS 745�
FIG. 3. W�
edepictthesituationthatleadsto thelowerboundfor h�
in the2D case.In red:thecurve.In black:the�
centersof B � x� � � � d1� 2 � x� . In green:thepointsof ! " # h� $ % x� & thatfall insideB ' x� ( d1) 2 * x� + for somex� , - ,.
and/ in bluethosethatdon’t.
Ontheotherhand,h�
hasto besmallenoughto guaranteethat 0 h remainssimplyconnectedwith� smoothboundariesandthat g1 remainssmoothinside 2 h.
Let3 4 5
be6
asbeforea boundfor theabsolutesectionalcurvatureof 7 , andlet 8 xg be6
the9
grid size.In addition,let W be6
themaximaloffsettingof thesurface: that9
guaranteesthat
9theresultingsetremainsconnectedanddifferentpartsof theboundaryof thatsetdo
not toucheachother. We show below thata suitableboundingof h�
is (recall thatd;
is thedimension
<of thespace),
=xg > d
; ?h
� @min
1A B C W D (14)
Let3
usintroducesomeadditionalnotation.Wedenotebycell the9
unit cell of thecomputa-tional
9grid.Letxg be
6apointin E h; wedenotebynF G xg H the
9numberof cellsC1 I xg J K L L L K CnM N xÐ O P xg Q
that9
containxg . It isclearthatif xg R S T Uh V W xg X (it is agrid point),thenxg is containedin 2d
�cellsY having xg asa vertex. It is alsoclearthatnF Z xg [ \ 2d
�. For a givencell C we] call ^ _ C `
the9
setof pointsof a b c h d e xg f that9
composeC (i.e., its vertices).We will denoteby C g xg hthe
9set nM i xÐ j
i k 1 Ci l xg m , andby n o xg p the9
set nM q xÐ ri s 1 t u Ci v xg w w .
Thelowerboundcomesfrom forcing that,for every xg x y , all pointsin C z xg { lie within|h (noteof coursethatwewanth
�to
9beassmallaspossible);seeFig. 3. Thatis,
xÐ } ~ C � xg � � �h �
Onceagain,thisconstraintcomesin orderto guaranteethatthereare“enough”pointstomakethediscretecalculations.Wetry tomakeC � xg � � C � xg � l � , whereC � xg � l � standsfor thehypercube
�centeredin xg , with sidelength2l , andsidesparallelto thegriddingdirections.
Theworstscenariois whenxg is a point in thediscretedomain,andwe musthave l � � xg .Finally, weobserve thatC � xg � l � � B � xg � l � d
; �. Theconditionthenbecomes
xÐ � � B� �
xg � � xg � d; � ¡
h ¢x£ ¤ ¥ B
� ¦xg § h
� ¨ ©
which] providesthelowerbound,h� ª «
xg ¬ d;
.

746�
MEMOLI AND SAPIRO
The
upperboundincludestwo parts.First, we shouldn’t go beyond W, sinceif we do,dif
®ferentpartsof theoffsetsurfacemight toucheachother, a situationthatcanevencreate
a nonsimplyconnectedband ¯ h. Thesecondpartof theupperboundcomesfrom seekingthat
9whentraveling on a characteristicline of ° at a point p± of² ³ , no shocksoccurinside´
h. It is a simplefact that this won’t happenif h� µ 1¶ · ; seeAppendixA. It is extremely
important¸
to guaranteethis bothto obtainsmoothboundariesfor ¹ h andto obtainsmootheº xtensionsof themetricg1 (g1 ).
»Note
¼of coursethatin general,h
�andalso ½ xg canY bepositiondependent.We canusean
adaptivegrid,andin placeswherethecurvatureof ¾ is high,or placeswherehighaccuracyis
¸desired,wecanmake ¿ xg small.
3.2.À
The Numerical Err or
ItÁ
is timenow to explicitly boundthenumericalerrorof ourproposedmethod.As statedabove, it isourgoaltoformallyshow thatwearewithin thesameorderasthecomputationallyoptimal² (fastmarching)algorithmsfor computingdistancefunctionson Cartesiangrids.Note
¼that thenumericalerror for thefastmarchingalgorithmon triangulatedsurfaceshas
notbeenreported,althoughit is of courseboundedby theCartesianone(sincethisprovidesaparticular“triangulation”).
3.2.1. NumericalÂ
Error Boundof theCartesianFastMarchingAlgorithm
The
aim of this sectionis to bounda quantitythatmeasuresthedifferencebetweenthenumericallycomputedvalue d
; gÃÄ Å p± Æ Ç È andthe real valued; gÃÉ Ê p± Ë Ì Í . Any suchquantitywill
compareY bothfunctionson Î , but in principlethenumericallycomputedvaluewill not bedefined
®all over thehyper-surface.Sowe will bedealingwith an interpolationstage,that
we] commentfurtherbelow in Section3.2.2.Let
3usfix a point p± Ï Ð , andlet f
Ä Ñ Ò Óbe
6thenumericallycomputedsolution(according
to9
(13)),and fÄ Ô Õ Ö
the9
real viscosity× solutionof theproblem(12).Theapproximationerroris
¸thenboundedby (see[49])
maxpØ Ù Ú Û Ü Ý Þ x£ ß à f
Ä áp± â ã f
Ä äp± å æ ç CL è é xê ë 1
2 ì (15)
where] CL is aconstant.In practice,however, theauthorsof [49] observedfirst-orderaccu-rací y. As wehaveseen,wealsofind anerrorof orderh
î 1ï 2 forð
thegeneralapproximationofthe
9weightedintrinsicdistanceon ñ with] thedistancein theband ò h, andapracticalorder
of² hî
(seeRemarkandTheorem2.2).Beforeproceedingwith thepresentationof thewholenumericalerrorof our proposed
algorithm,weneedthefollowing simplelemmawhoseproofweomit.
L3
EMMAó 3.1. F
ôor a convex setD õ ö , and÷ y ø zù ú D
û, f
Äsatisfies
üf
Ä ýzù þ ÿ f
Ä �y� � � � � P
� �L � � � zù y� � �
Remark. Using�
the precedingLemmaand(15), it is easyto seethat for xê suchthatC � xê � � � ,
�f
Ä �p± � � f
Ä �q� � � � 2CL � � xê 1
2 ! " P� #
L $ % & ' (d
; )xê * + p± , q� - . / xê 0 (16)
a relationwewill shortlyuse.

DIST1
ANCE FUNCTIONSAND GEODESICS 747�
3.2.2. TheInterpolationError
Sincefollowing our approachwe arenow computingthedistancefunction in theband2h, in thecorrespondingdiscreteCartesiangrid, we have to interpolatethis to obtainthe
distance®
on the zerolevel-set3 . This interpolationproducesa numericalerror which weno4 w proceedto bound.
Given thefunction 5 : 6 7 8 9 : xê ; < IR ( = being6
agenericdomain,whichbecomestheband
6 >h for
ðourparticularcase),wedefinethefunction? @ A B : C D IR
Ethrough
9aninterpola-
tion9
scheme.Wewill assumethattheinterpolationerroris boundedin thefollowing way:10
supyF G H I x£ J K L M yN O P Q R S T U xê V W X max
zY Z [ \ x£ ] ^ _ z` a b minzY c d e x£ f g h z` i
for every xê j k .
3.2.3. TheTotal Error
Wl
e now presentthe completeerror (numericalplus interpolation)introducedby ouralgorithm, without consideringthe possibleerror in the computationof g1 (or in otherw] ords,weassumethattheweightwas alreadygiven in thewholeband m h).
nLet p± be
6apoint in o . Wedenoteby
p d; gÃq r p± s t u : v w IR
Ethe
9intrinsic g-distancefunctionfrom p± to
9any point in x .y d
; gÃh z p± { | } : ~ h � IR the
9g1 -distancefunctionfrom p± to
9any otherpoint in � h.
� d; gÃ
h � p± � � � : � � � h � � xê � � IR the9
numerically� computedv× alueof d; gÃ
h � p± � � � to9
any pointin
¸thediscretedomain.� � � d; gÃ
h � � p± � � � : � � IRE
the9
resultof interpolatingd; gÃ
h (that’sonly specifiedfor pointsin� � �h � xê ¡ )
¢to pointsin IRd
£ ¤ ¥.
The¦
goalis thento bound § d; gè © p± ª « ¬ ® ¯ d° gÃ
h ± ² p± ³ ´ µ ¶L · ¸ ¹ º , andweproceedto dosonow.
Let xê be»
in ¼ andyN in ½ ¾ xê ¿ , then
d° gÃÀ Á p± Â xê Ã Ä Å d
° gÃh Æ p± Ç xê È É d
° gÃÊ Ë p± Ì xê Í Î d° gÃ
h Ï p± Ð xê Ñ Ò d° gÃ
h Ó p± Ô xê Õ Ö d° gÃ
h × p± Ø yN ÙÚ
d° gÃ
h Û p± Ü yN Ý Þ d° gÃ
h ß p± à yN á â d° gÃ
h ã p± ä yN å æ ç è d° gÃh é ê p± ë xê ì í (17)
andusingProposition2.2, Lemma3.1 (15), andsimplemanipulations(in that order)weobtainî
d° gÃï ð p± ñ xê ò ó ô d
° gÃh õ p± ö xê ÷
ø C ù hî údiam
° û ü ýh
î 12
þ ÿ M�
gà � xê � yN � � CL � � xê � 12
þ � maxyF � � x£ d° gÃ
h � p± � yN � � minyF � � � x£ � d
° gÃh � p± � yN � �
Thelasttermcanbedealtwith using(16).Sincewewantbothhî �
0�
and h�x£ � � , in order
to�
have increasingfidelity in theapproximationof d° gÃ
h by»
its numericcounterpartd° gÃ
h ,11 we can! choose(for instance)h
î "Cx£ # $ xê % & for someconstantCx£ ' ( d
°and ) * + 0� ,
1- . We
10 Onemayimagineseveralinterpolationschemessatisfyingthisnot-stringent-at-allcondition.11 Thisway, wewill haveanincreasingnumberof pointsin . h
/ .

7480
MEMOLI AND SAPIRO
then�
obtain
d° gÃ1 2 p± 3 4 5 6 7 d
° gÃh 8 p± 9 : ;
L < = > ? @ A B xê C D2E F G H xê I J K L (18)
whereM N O P xê Q R S goesT to a constant(that dependson U ) a¢
s V xê W 0,�
andthis providesthedesired
Xbound.
T¦
o recap,wehaveobtainedthattheuseof anEuclideanapproximationin theband Y h to�
the�
intrinsicdistancefunctiononthelevel-setZ doesn’X
t (meaningfully)changetheorderofthe
�wholenumericalapproximation,in theworstcasescenario.While in themostgeneral
case! thetheoreticalboundfor theerrorof ourmethodis of orderhî 1[ 2 andthegeneralorder
ofî theerrorof theunderlyingnumericalschemeis \ ] xê ^ 1_ 2, for all practicalpurposestheapproximationerror(over ` )
¢betweenbothdistances(d
° gÃa andd° gÃ
h )¢
isof orderhî
(seeremarkafterCorollary2.1),andthepracticalnumericalerrorbetweend
° gÃh andd
° gÃh is
bof order c d xê e f
(for someg h [ 12 i 1j for ourfirstorderschemes).Then,thepracticalboundfor thetotalerror
becomes»
somethingof order k l xê m minn o p q r . Therefore,choosingabig enoughs t u 1) dispelsany concernsaboutworseningtheoverallerrorratewhendoingCartesiancomputationsonthe
�band.12
T¦
o conclude,let’s point out thatsincewe areworking within a narrow band( v h) o¢
ft hesurfacew , we areactuallynot increasingthedimensionalityof theproblem.We canthenwM ork with a Cartesiangrid while keepingthesamedimensionalityasif we wereworkingonî thesurface.13
4. EXPERIMENTS
Wx
enow presentanumberof 3D examplesof ouralgorithm.Recallthatalthoughall theey xamplesaregiven in 3D, thetheorypresentedabove is valid for any dimensiond
° z3.
T¦
wo classesof experimentalresultsarepresented.We show a numberof intrinsic dis-tance
�functionsfor implicit surfaces,aswell asgeodesicscomputedusingthesefunctions.
In{
orderto computeinterestinggeodesics,weusealsononuniformweights,permittingthecomputation! of crest/valleys,andoptimalpathswith obstacles.Wealsoexperimentallycom-pare| our resultswith thoseobtainedon triangulatedsurfacesusingthefastmarchingtech-niquedevelopedby Kimmel andSethian(for thisweusetheresultsandsoftwarereportedin [6]).
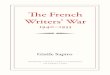
Figures}
4, 5, and6 show the intrinsic distancefunction for implicit surfacescomputedwithM themethodhereproposed(g~ � 1). An arbitraryseedpointon theimplicit surfacehasbeen
»chosen,andpseudocolorsareusedto improve the visualization.Redcorresponds
to�
low valuesof thedistanceandblueto thehigh ones.We observe that,asexpected,thedistance
X(colors)vary smoothly, andthat closepointshave similar colorsandfar points
ha�
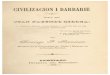
veverydifferentcolors(closeandfar measuredon thesurfaceof course).In Fig.7wecomparetheresultof ourapproachwith thatof fastmarchingonatriangulated
surface (all triangulated-surfacecomputationswere donewith the packagereportedin[6]). We alsoshow absolutedifferences(error) betweendistancesobtainedthroughboth
12 Note�
thatthenumericalschemeusedby thefastmarchingalgorithmdecreasesits accuracy whennondiffer-entiable� pointsof thedistanceappear, thiscanhappenfor instancewhenthedomaincontainsthecut locusof theinitial�
set[15]. In any case,� � x� � 12 is theslowesterrorrateachievable.
13 Thenumberof pointsin thebandcanberoughlyestimatedby thequantity2 h a�
rea[ � ] when � x� � 1.

DIST1
ANCE FUNCTIONSAND GEODESICS 749�
FIG. 4. Distancemapsfromapointonthesphere,torus,andteapot(threeviewsarepresentedfor eachmodel).
approaches.The particularpatternof the error is the subjectof future research.In Fig. 8weM show level lines of the intrinsic distancefunction computedwith the techniquehereproposed.|
Before�
concludingthis part of the experiments,let’s give sometechnicaldetailsonthe
�implementation.The codefor the examplesin this paperwas written in C++. For
visualization× purposes,VTK wasused.Mostof the“hardcode”wasdonetakingadvantageofî Blitz++’s doubletemplatizedarraysandrelatedroutines,see[9]. The implicit modelsused� in this paperwereobtainedfrom [67] (othertechniques,e.g.,[40], couldbeusedaswell).M All thecodewascompiledandrun in a450Mhz PentiumIII, with 256Mb of RAM,wM orkingunderLinux (RedHat6.2).Thecompilerusedwas � � � � � � � � � � � � andthelevel ofoptimizationî was3. InTable1weshow runningtimesof theintrinsicdistancemapalgorithmfor
�someof theimplicit modelsweused,alongwith thecorrespondingof� fset-value(h
î)
¢and
sizeandnumberof grid pointsin � h for eachmodel.
4.1. Geodesicson Implicit Surfaces
T¦
o find geodesiccurveson the implicit surface,we backtrackstartingfrom a specifiedtar
�get point toward the seedpoint, while traveling on the surfacein the directiongiven

FIG. 5. Distancemapfrom apointonaportionof white/graymatterboundaryof thecortex.
FIG. 6. Distancemapfrom oneseedpoint on a knot. In this picturewe evidencethat thealgorithmworkswell� for quiteconvolutedgeometries(aslong ash is properlychosen).Notehow pointsclosein theEuclideansense� but faraway in theintrinsic sensereceiveverydifferentcolors,indicatingtheir large(intrinsic)distance.
750�

DIST�
ANCE FUNCTIONSAND GEODESICS 751
FIG. 7. Top: Distancemapfrom a singleseedpoint (situatedat thenose)on animplicit bunny (g ¡ 1). Thefigureon thetop-left was obtainedwith theimplicit approach(dh
¢ )£
herepresented,while theoneon thetop-rightwas derived with thefastmarchingon triangulatedsurfaces(d
¤ ¥)£
technique.Bottom:Threeviews of theabsolutedifferencebetweenboth distancefunctions(d
¤h
¢ ¦ d§ ). The maximaldifference(error betweenthe distances)is4 ¨ 1439,being91© 5599themaximalcomputeddistancein theband.
byª
the (negative) intrinsic-distancegradient.This meansthatafterwe have computedtheintrinsicdistancefunctionasexplainedabove, wehaveto solve thefollowing ODE(whichobviouslykeepsthecurveon « ):
¬® ¯ ° ± ² d
³ g´µh
¢ ¶ · ¸¹ º 0» ¼ ½
p¾ ¿ À ÁwhereÂ
à Äd
³ g´Åh
¢ Æ p¾ Ç ÈÉ Ê d³ g´Ë
h¢ Ì p¾ Í Î Ï d
³ g´Ðh
¢ Ñ p¾ Ò Ó Ô Õ Ö p¾ × Ø Ù Ú p¾ Û
TABLE 1
Model Size #Ü Ý Þ h¢ ß à xá â h RunningTime (secs)
Brain 122 ã 142 ä 124 168å 603 1 æ 75�
9 ç 4Bunnè
y 81 é 80 ê 65ë
38ì 107 1 í 75�
1 î 99Knot 80 ï 81 ð 44 16ñ 095 1 ò 0 0
ó ô76
Sphereõ
70 ö 70 ÷ 70�
11ø 800 1 ù 75 0 ú 65ë
Torus 64 û 64 ü 64ë
21ý 704�
1 þ 75 1 ÿ 16Teapot 80 � 55
� �46 24� 325
�1 � 75 1 � 22
�

752
M�
EMOLI AND SAPIRO
FIG. 8. Top: Level lines for the intrinsic distancefunction depictedin Fig. 7 (left). Bottom: Level linesfor
the intrinsic distancefunction depictedin Fig. 4 (secondrow). In both rows, the (22) levels shown are0ó
03ó �
0 � 05 0 � 1 � � � � � 0 � 95� 0 � 97�
percentof the maximumvalueof the intrinsic distance,andthe coloring of thesurf� acecorrespondsto the intrinsic distancefunction. Threeviews are presented.Note the correctseparationbetween�
adjacentlevel lines.Notealsohow theselinesare“parallel.”
is�
thegradientof d³ g´�
h¢ at p¾ � � projected� ontothetangentspaceto � � � � � 0
» at p¾ . Since
we mustdiscretizetheabove equation,onecanno longerassumethatat every instantthegeodesic! path " will lie on the surface,so a projectionstepmustbe added.In addition,sinceall quantitiesareknown only at grid points,an interpolationschememustbe usedto
#performall evaluationsat positionsgiven by $ . We have useda simpleRunge–Kutta
inte�
grationprocedure,with adaptivestep,namelyanODE23procedure.Beforepresentingexamplesof geodesiccurves,weshouldnotethatweareassumingthat% &d
³ g´'h
¢ , theextrinsicgradientof thedistancein theband,is agoodapproximationof ( ) d³ g´* ,
the#
intrinsicgradientof theintrinsicdistance(andnot justd³ g´+
h¢ agoodapproximationof d
³ g´,aswehavepreviouslyproved).Boundingtheerrorbetweenthesetwo gradients,e.g.,usingthe
#framework of viscositysolutions(sinceintrinsicdistancesarenotnecessarilysmooth),
is thesubjectof currentwork (seealsonext sectionfor anumericalexperiment).The figuresdescribednext illustrate the computationof geodesiccurves on implicit
surfacesfor differentweightsg- . In all thefiguresthegeodesiccurve isdrawn ontopof thesurface,which is coloredasbefore,colorsindicatingtheintrinsicweighteddistance.
In.
Fig. 9 we presentboth the geodesiccurve computedwith our techniqueand theone computedwith the fast marchingalgorithm on triangulatedsurfacesfollowing theimplementationreportedin [6].
In.
Fig.10weshow thecomputationof sulci (valleys)onanimplicit surfacerepresentingthe
#boundarybetweenthe white andgray matterin a portion of the humancortex (data
obtainedfrom MRI). Here the (extended)weight g- is a function of the meancurvaturegi! ven by [6]
g- valley / x0 1 2 3 4 M 5 x0 6 7 miny8 9 :
h¢ M ; y< = p> ?

DIST�
ANCE FUNCTIONSAND GEODESICS 753
where M@
standsfor themeancurvatureof thelevel setsof A , so it is computedsimply asM
@ Bx0 C D E F G x0 H . In theexamplepresentedwe usedI J 100and p¾ K 3. More detailson
the#
useof this approachfor detectingvalleys (andcreases)canbefoundin [6] andin thereferencesL therein.
In Fig.11weshow thecomputationof geodesiccurveswith obstaclesonimplicit surfaces.This is animportantcomputationfor topicssuchasmotionplanningonsurfaces.
4.2. SimpleNumerical Accuracy Validations
WM
e concludetheexampleswith somesimplenumericalvalidations.Sincefor a sphere,for instance,therealdistancescanbecomputed,wecomparethesewith thosenumericallycomputedN with ouralgorithm.Aspreviouslyexplained,for thiscasetheerrorof ourproposedband-based
ªapproximationof the intrinsic (continuous)distanceis of orderh
O(actually, it
canN beshown thattheorderis slightly superlinear).We have testedthecomputeddistancebetween
ªgiven seedpointsin thespherefor anumberof differentgrid sizes(resolutions)in
the#
cube[0 P 1]3, obtainingtheerrorsgiven in Table2. In obtainingthedatawe have usedh
O Q2
R S TxU V 0W 7. It canbeobservedanoverall error
Xd
³ Y Z [ \d
³h ] ^ L
_ ` a b crategiven approximatelyby d e xU f 0g 653.
Althougha thoroughstudyof theapproximationof h i d³ g´j by
ª k ld
³ g´mh
¢ will bethesubjectof futureresearch,we will presentbelow somenumericevidence.Noteof coursethat themainconcern,aspreviously explained,is at thecut locus(singularitieson thegradientofthe
#distancefunction).To thebestof our knowledge,completeanalysisof theaccuracy of
the#
gradientof theintrinsicdistancehasnot yetbeenperformedfor triangulatedsurfaces.
TABLE 2
Size h OverallNumericalError
100 0 n 079621 0 o 111035120 0 p 070081 0 q 101189140 0 r 062912 0 s 090596160 0 t 057298 0 u 084766180 0 v 052764 0 w 077357200 0 x 049012 0 y 072119220 0 z 045849 0 { 069262240 0 | 043140 0 } 064085260 0 ~ 040789 0 � 061003280 0 � 038727 0 � 057780300 0 � 036901 0 � 056024320 0 � 035271 0 � 053569340 0 � 033806 0 � 051469360 0 � 032480 0 � 048853380 0 � 031273 0 � 047292400 0 � 030170 0 � 046195420 0 � 029157 0 � 044747440 0 � 028223 0 � 043254460 0 � 027358 0 � 041999480 0 � 026555 0 � 040501500 0 � 025807 0 � 039396

754�
MEMOLI AND SAPIRO
FIG.�
9. Top: Distancemap(weight � 1) andgeodesiccurve betweentwo pointson an implicit bunny. Weshow two geodesicssuperimposed,theblackoneis theoneobtainedvia theimplicit backpropagationdescribedin thetext, while thewhiteoneis obtainedwhenperformingthebackpropagationcomputationin thetriangulatedsurface.It is importantto notethatin bothcasesthedistancefunctionusedis theonecomputedwith our implicitapproach;to feedthedatatothetriangulatedsurfacesback-propagationalgorithm,wefirst interpolatedtheintrinsicdistanceto pointsonto the triangulatedsurface.We canclearlyseethatbothgeodesicsoverlapalmostentirely,justifying
�theproposedimplicit backpropagationapproachwhencomparedto theoneonthetriangulatedsurface.
Bottom:We repeatthetop figure,but now for thewhite curve (� � ) thedistanceusedwas alsocomputedon thetriangulatedsurface.In otherwords,the black curve (� h
� ) correspondsto completeimplicit computations,bothdistanceandbackpropagation,while the white onecorrespondsto completecomputationson the triangulateddomain.For thisparticularexample,thegeodesicobtainedwith thecomputationsontheimplicit surfaceisactuallyshorterthantheoneobtainedwith computationson thetriangulatedrepresentation.

DIST�
ANCE FUNCTIONSAND GEODESICS 755
FIG. 10. Thesefour figuresshow the detectionof valleys over implicit surfacesrepresentinga portion ofthehumancortex. We usea meancurvaturebasedweighteddistance.In theleft-uppercornerwe show themeancurvatureof thebrainsurface(clippedto improve visualization).It is quiteconvincing that this quantitycanbeof greathelp to detectvalleys. In the remainingfigures,we show two curvesover the surface,whosecoloringcorrespondto themeancurvature(not clipped,from red,yellow, greento blue,asthevalueincreases).Theredcurve correspondsto the natur� al geodesic (g¡ ¢ 1), while the white curve is the weighted-geodesicthat shouldtravel through“nether” regions.Indeed,a very cleardifferenceexistsbetweenboth trajectories,sincethewhitecurve makesits way throughregionswherethe meancurvatureattainslow values.The figure in the right-lowquadrantis azoomedview of thesamesituation.
WM
emakeall ourcomputationsagainfor simplicity, over asphere,takingg£ ¤ 1 (wewilldiscard
¥thesuperscriptsg£ andg£ for
¦theremainsof thissection).As anindicatorof how well§ ¨
d³ ©
h¢ approximatesª « d
³ ¬(over )
¬we look at how muchthe quantity ® ¯ ° d
³ ±h
¢ ² dif¥
fersfrom 1. In Fig.12weshow ninehistogramsof theaforementionedquantity, for 1000pointson the sphereandfor nine (increasing)valuesof h
O. It canbe observed that the valuesof³ ´ µ
d³ ¶
h¢ · spreadmoreandmoreash
Ogro! ws.
5.¸
EXTENSIONS
5.1.¹
GeneralMetrics: SolvingHamilton–JacobiEquationson Implicit Surfaces
Sincethe very beginning of our exposition we have restrictedourselves to isotropicmetrics.As statedin the introduction,this alreadyhasmany applications,andjust a few

756�
MEMOLI AND SAPIRO
FIG. 11. Distancemapandgeodesiccurvebetweentwo pointsonanimplicit bunny surfacewith anintrinsicobstacleº on it. Wenow useabinaryweight,g » ¼ 1½ ¾ ¿ ,À beinginfinity at theobstacle.Thispermits,asillustratedin thefigure,thecomputationof optimalpathswith obstacleson implicit surfaces.Thebluepathcorrespondstotheobstacle-weighteddistancefunction,andthewhiteoneto thenatural(gÁ Â 1)distancefunction.Bothgeodesicsareshown over thesurfaceof thebunny, thepseudocolorrepresentingtheweighteddistancefor thesurfacewithobstacle.Theobstacleis alsoshown in blue.Notethatthegeodesicis nottouchingtheobstacledueto thelow gridresolutionusedto defineit in thisexample(low resolutionwhichmakesit actuallynotabinarybut amultivaluedobstacle).
wereà shown in the previous section.Sincethe fastmarchingapproachhasbeenrecentlyeÄ xtendedto moregeneralHamilton–Jacobiequationsby OsherandHelmsen[45], we areimmediately
Åtemptedto extendour framework to theseequationsaswell. Theseequations
have applicationsin importantareassuchasadaptive meshgenerationon manifolds,[28],andsemiconductorsmanufacturing.
Then,Æ
we areled to investigatetheextensionof our algorithmto generalmetricsof theform, G : Ç È IRd
É Êd
É, that is, a positive definite2-tensor. Our new definitionof weighted
lengthË
becomes
LÌ
G Í Î ÏÐÑ b
aG Ò Ó Ô t Õ Õ [ Ö× Ø
t Ù Ú ÛÜ Ýt Þ ] dt
ß à

DISTá
ANCE FUNCTIONSAND GEODESICS 757â
FIG. 12. Histogramsof ã ä å dæ hç è for several(increasing)valuesof h, for 1000pointsuniformly distributed
oné asphere.Fromleft to right andtop to bottom,thehistogramsareplottedfor increasingvaluesof hê
.ëandtheproblemis to find for every xì í î (for afixed pï ð ñ ),
ò
dß Gó ô xì õ pï ö ÷ø inf
Åùpxú [ û ]
üL
ÌG ý þ ÿ � � (19)
As before,we attemptto solve theapproximateproblemin theband � h, with anextrinsicdistance
�
dß G�
hç � xì � pï � � inf
Åpxú [ � h
ç ]
�L
ÌG � � � � (20)
whereÃ
LÌ
G � � ��� b
aG � � � t � � [ �� �
t � � ! "t # ] dt
ß
for$
an adequateextensionG of% G. The solutionof the extrinsic problemsatisfies(in theviscosity& sense)theEikonalequation
'G ( 1 ) * xì + , d
ß G-h
ç . / dß G0
hç 1 1 2 (21)
The first issuenow is the numericalsolvability of the precedingequationusing a fastmarching3 typeof approach.OsherandHelmsen[45] have extendedthecapabilitiesof thefastmarchingto dealwith Hamilton–Jacobiequationsof theform
H 4 xì 5 6 f7 8 9
a: ; xì <

758â
MEMOLI AND SAPIRO
for$
geometricallybasedHamiltoniansH= >
xì ? @pï A : B C D IRE d
É F GIR
E dÉ H
IRE
thatI
satisfy
H= J
xì K Lpï M N 0 iO
f Ppï QR S0OH
= Txì U Vpï W is
Åhomogeneousof degree1 in Xpï
pïi H
=pY i
Z [ xì \ ]pï ^ _ 0O
for 1 ` i a dß b
xì c d e f gpï h(22)
It easilyfollows thattheseconditionshold for (21)considering
H= i
xì j kpï l mn o G p 1 q r xì s [ tpï u vpï ] wwhenà thematrixG x 1 y xì z is diagonal.Therefore,wecansolvethiskind of Hamilton–JacobiequationsÄ (theextrinsicproblem)with theextendedfastmarchingalgorithm.
In{
order to show that our framework is valid for theseequationsaswell, all what webasically
|needto dois to provethattheextrinsicdistance(20)ontheoffset } h con~ vergesto
theI
intrinsiconeontheimplicit surface� , i.e.,(19).Thiscanbedonerepeatingthestepsinthe
Iconvergenceproofpreviously reportedin Section2.3for isotropicmetrics.Combining
thisI
with the resultsof Osherand Helmsenwe then obtain that our framework can beappliedto alargerclassof Hamilton–Jacobiequations:generalintrinsicEikonalequations.Theextensionof theseideasto evenmoregeneralintrinsic Hamilton–Jacobiequationsofthe
Iform H
� �xì � � � u� � a� � xì � xì � � remains� to be studied,andeventualadvanceswill be
reportedelsewhere.
5.2.�
Nonimplicit Surfaces
Theframeworkwepresentedwasheredevelopedfor implicit surfaces,althoughit appliesto
Iothersurfacerepresentationsaswell. First, if thesurfaceis originally given in polygonal
or% triangulatedform,orevenasasetof unconnectedpointsandcurves,wecanuseanumberof% availabletechniques,e.g.,[34,40,47,55,58,65,67] (andsomeverynicepublicdomainsoftware[40]), to first implicitize thesurfaceandthenapplythetechniquehereproposed.14
Note�
that theimplicitation needsto bedoneonly oncepersurfaceasa preprocessingstepandwill remainvalid for all subsequentusesof thesurface.This is important,sincemanyapplicationshavebeenshown to benefitfrom animplicit surfacerepresentation.Moreover,as we have seen,all what we needis to have a Cartesiangrid in a small bandaroundthe
Isurface� . Therefore,thereis no explicit needto performanimplicitation of thegiven
surfacerepresentation.For example,if thesurfaceisgivenby acloudof unconnectedpoints,weà cancomputedistancesintrinsic to thesurfacedefinedby thiscloud,aswell asintrinsicgeodesic� curves,withoutexplicitly computingtheunderlyingsurface.All thatis neededisto
Iembedthiscloudof pointsin aCartesiangrid andconsideronly thosepointsin thegrid
atadistanceh�
or% lessfrom thepointsin thecloud.Thecomputationsarethendoneon thisband.
|
6.�
CONCLUDING REMARKS
In{
this article we have presenteda novel computationallyoptimal algorithm for thecomputation~ of intrinsic distancefunctionsandgeodesicson implicit hyper-surfaces.The
14 The�
sametechniquescanbeappliedto transformany givenimplicit functioninto adistanceone.

DISTá
ANCE FUNCTIONSAND GEODESICS 759â
underlying� idea is basedon using the classicalCartesianfastmarchingalgorithm in anof% fsetboundaroundthegiven surface.We have providedtheoreticalresultsjustifying thisapproachandpresenteda numberof experimentalexamples.The techniquecanalsobeappliedto 3D triangulatedsurfaces,or evensurfacesrepresentedby cloudsof unconnectedpoints,� afterthesehavebeenembeddedin aCartesiangrid with properboundaries.Wehavealsodiscussedthat the approachis valid for moregeneralHamilton–Jacobiequationsaswell.Ã
Man�
y questionsremainopen.Recently, T. Barth (and independentlyD. Chopp)haveshowntechniquesto improvetheorderof accuracy of fastmarchingmethods.It will beinter-estingÄ toseehow themethodproposedherecanbeextendedtomatchsuchaccuracy.Relatedto
Ithis,wearecurrentlyworkingontighterboundsfor theerrorbetweend
ß g��h
ç anddß g�� ,aswell as
bounds|
for theerrorbetweentheircorrespondingderivatives.Weareinterestedin extendingthe
Iframeworkpresentedhereto thecomputationof distancefunctionsonhighcodimension
surfacesandgeneralembeddings.Moregenerally, it remainsto beseenwhatclassof intrin-sicHamilton–Jacobi(or in general,whatclassof intrinsicPDEs)canbeapproximatedwithequationsÄ in theoffsetband � h. In an even moregeneralapproach,whatkind of intrinsicequationsÄ canbe approximatedby equationsin otherdomains,with offsetsbeing just aparticular� andimportantexample.Even if fastmarchingtechniquesdo not exist for theseequations,Ä it mightbesimplerandevenmoreaccurateto solvetheapproximatingequationsin
Åthesedomainsthanin theoriginalsurface� . Theframeworkherepresentedthennotonly
of% fersasolutiontoafundamentalproblem,but alsoopensthedoorstoanew areaof research.
APPENDIX�
A: DISTANCE MAPS IN EUCLIDEAN SPACE
W�
e now presenta few important resultson distancemaps.Thesehave beenmainlyadapted(andadopted)from [4, 5, 26,54].
Where�
ver � is smoothweknow thatit satisfiestheEikonalequationÄ� ¡ ¢ £
1 ¤ (A.1)
TheÆ
distancefunctionsatisfiesthisPDEeverywherein theviscosity¥ sense[29,20]. It is alsowellà known thatwithin asufficiently smallneighborhoodof ¦ § ¨ © ª 0
O «, ¬ ® ¯ is
Åsmooth° ,
or% at leastassmoothas ± . Theseassertionscanbe madeprecisethroughthe followingLemma
²from [24]:
L²
EMMA A.1.³
Let´ µ
be¶
a Ck·
(k¸ ¹
2) codimension1 closedhyper-surfaceof IRdÉ.º Then,
thesigneddistancefunctionto » is Ck· ¼
U ½ for¾
a certainneighborhoodU of ¿ .ºDif
Àferentiating Á Â Ã Ä 2 Å 1, weobtain
D Æ Ç È É Ê Ë Ì 0O Í
Therefore,
H Î Ï Ð Ñ 0O
(A.2)
meaningÒ that thenormalto Ó at pï isÔ
aneigenvectorof theHessian,associatedto thenulleigenÕ value.Differentiatingagainweobtain
D3 Ö × Ø Ù Ú D2 Û Ü 2 Ý 0O Þ
(A.3)

760â
MEMOLI AND SAPIRO
Theß
next Lemma,whosedetailedproof can be found in [4], is mainly basedin therelations(A.2) and(A.3), and it is usedto verify that the function à : á â ã ä å æ ç IRd
è éd
èdefined
êby ë ì t í î H
ï ð ñpï
0 ò t ó ô õ pï0 ö ö ÷ pï
0 isÔ
any point in themanifold ø ù ú 0O û ü
satisfiesthe
ýfollowing ODE:
þÿ � t � � � 2 � t � � 0O
t � � � � LEMMA A.2. Theeigenvectorsof H � ar� econstantalongthecharacteristiclinesx � s° � �
xì 0 � s° � � � xì � s° � � (ar� c lengthparametrized, xì 0 is a pointonto � )ò
of� � within� anyneighbor-hood
�where it is smooth, and� theeigenvaluesvaryaccording to
�i � s° � ! i " 0O #
s° $i % 0O & '
1 (W
�eusetheaboveformulato boundthemaximumoffset ) * + of, - . / 0
O 0that
ýkeeps1 2 3 4 5
smooth,we just take 6 7 8 9 maxÒ1: i ; d
è <1 = > i ? 0O @ A B C
1.W
�enow obtainboundson theeigenvaluesof theHessianof thedistancefunction:
CD
OROLLARY A.1. TheeigenvaluesE i F pG H of� H I J pG K (principalG curvaturesof L xM : N O xM P QR SpG T U )
Var� eabsolutelyboundedby
W Xi Y pG Z [ \ ] ^
1 _ ` a b pG c d e f gwher� e h i absolutely� boundsall eigenvaluesof H j k pG l m pG n o ; and� p q r pG s t is sufficientlysmall.°
Tß
o conclude,let’spresentsomeconceptsonprojectionsontotheimplicit surfaceu , zerolevel-setof thedistancefunction v . It isclearthattheprojectionof apoint pG w IRd
èonto, x
isÔ
given by
y z {pG | } pG ~ � � pG � � � � pG � �
This projectionis well definedaslong asthereis only onexM � � suchthat � � � pG � � xM .This canbe guaranteedwhenworking within a small tubular neighborhoodof a smoothsurface� . Moreover, thismapis smoothwithin acertaintubularneighborhoodof � [54]:
Tß
HEOREM� A.1.
�If
� � �IR
� dè
is a compactCk·
(k¸ �
2) codimension1 hyper�
-surface, thenthereisah � � � � 0
�suc° hthatthemap � � iswelldefinedandbelongstoCk
· �1 � � xM : d
¡xM ¢ £ ¤ ¥
h� ¦ §
IR� d
è ¨ ©
APPENDIXª
B: TECHNICAL LEMMA
LEMMA B.1. Let f : [a« ¬ b¶] IR bea C1 ® [a« ¯ b
¶] ° function
¾such that f ± is Lipschitz.Let² ³ L
´ ´ µ[a« ¶ b
¶] · denote
¸one¹ of º f
¾ »’s° weakderivative. Thenonehas
b
af
¾ ¼ 2 ½ xM ¾ dx ¿
f f¾ À b
a Áb
af
¾ ÂxM Ã Ä Å xM Æ dx

DISTÇ
ANCE FUNCTIONSAND GEODESICS 761È
Proof. Let ext É f¾ Ê Ë
denoteê
theLipschitzextensionof f¾ Ì
toý
all IR giÍ ven by
exÕ t Î f¾ Ï Ð Ñ
xM Ò Ó f¾ Ô Õ
a« Ö for×
xM Ø a«f
¾ Ù ÚxM Û for xM Ü [a« Ý b
¶]
f¾ Þ ß
b¶ à
for×
xM á b¶
Thenlet ext â f¾ ã
beä
given by any (bounded)primitiveof ext å f¾ æ ç
, thatis,ext è f¾ é ê
exÕ t ë f¾ ì í
.Let
²ˆî ï L
´ ðIR
�denote
êext ñ f
¾ ò ó’sweakderivative, andwehave that ˆô õ
[aö b] and ÷ coincideø asweakù derivativesof f
¾. Let ú û ü ý þ ÿ � � � � 0� be
äa family of boundedsupportmollifiers.Thenwe
defineê
thefunction
f¾ � �
exÕ t � f¾ � � �
It is clearthatwewill have ( � meansuniformconvergence)
(a)
f¾ � � � 0� �� � exÕ t � f
¾ �o, ver compactsetsof IR
(b)
f¾ ��
� � 0� �� � exÕ t f¾ ! "
o, ver compactsetsof IR
(c)
f¾ # #$ % & 0' ( ˆ) locally
*in L
´ 2 + IR� ,
Since f¾ -. / C 0 1 IR
� 2, wecanuseintegrationby partsto concludethat
b
af
¾ 34 2 5 xM 6 dx7 8
f¾ 9: f
¾ ; b
a <b
af
¾ = >xM ? f
¾ @ @A B xM C dx7 D
NoE
w the left-handside will converge to ba f
¾ F 2 G xM H dx7
inÔ
view of I b¶ J; the first term in
theý
right-handsidewill obviously converge to f f¾ K L b
a. For the remainingtermwe observethe
ýfollowing, using Cauchy–Schwartz inequality (let M N O : L2 P [a« Q b
¶] R S L2 T [a« U b
¶] V W IR
denoteê
L´ 2 X [a« Y b
¶] Z ’s internalproduct):
b
af
¾ [ \xM ] f
¾ ^ ^_ ` xM a dx7 b b
af
¾ cxM d e f xM g dx
7h i j f
¾ k kl m f¾ n o p q r s
f¾ t u v u w
f¾ x xy z f
¾ { |f
¾ } ~ �f
¾ �f
¾ � �� � � � �� � b¶ �
a« � max�x� � [a� b] �
�f
¾ � �� � x� � � � f¾ � �
f¾ �
L2 � [a� b] ��
max�x� [a¡ b] ¢
£f
¾ ¤x� ¥ ¦ § f
¾ ¨ ¨© ª « ¬ L2 ®
[a b] ° ±No
Ew, everythingis undercontrolsince
maxÒ²x� ³ [a b] µ
¶f
¾ · ·¸ ¹ xº » ¼ ½ ¾ ¿ ÀL Á  [aà b] Ä Å

762È
MEMOLI AND SAPIRO
Hence,Æ
wehaveproved
b
af
¾ Ç Èxº É f
¾ Ê ÊË Ì xº Í dx7 Î Ï 0Ð Ñ b
af
¾ Òxº Ó Ô Õ xº Ö dx
7
theý
laststepof theproof. ×
ACKNOWLEDGMENTS
Many colleaguesand friends helpedus during the courseof this work and they deserve our most sincereacknoØ wledgment.Prof. Miguel Paternain,in theearlystagesof this work, pointedout very relevant references.Prof.Ù
StephanieAlexander, Prof. David Berg, and Prof. RichardBishop helpedus with our questionsaboutgeodesicsÚ onmanifoldswith boundaries.Prof.Stanley Osherhelpeduswith issuesregardingthefastmarchingalgo-rithmin general,andhisrecentextensionsin particular, whileProf.RonKimmeldiscussedwith ustopicsrelatedtohisworkontriangulatedsurfacesandprovidedgeneralcommentsonthepaper. Prof.Osheralsohelpedwith thelit-eratureÛ onrateof convergenceof Hamilton–Jacobinumericalapproximations.Prof.OmarGil helpeduswith somedeepÜ
insightsinto technicalaspectsof thework. Thiswork benefitedfrom rich conversationswith AlbertoBarte-saghiÝ (whoalsoprovideduswith someof hiscodeto extractgeodesicsin triangulatedsurfaces),CesarPerciante,Luis Vasquez,FedericoLecumberry, andProf.GregoryRandall.Wealsoenjoyedimportantdiscussionwith Prof.VÞ
icentCasellesonthedensityof zerosof generalfunctions.WealsothankProf.Luigi Ambrosiofor hiscommentsonß theregularityof level-setsof distancefunctions.Weareindebtedto AlvaroPardofor hiscarefulreadingof themanuscriptandfor hissuggestions.WethankProf.L. T. ChengandRichardTsaifor theircomments.Prof.H. Zhaoproà videdsomeof theimplicit surfaces.FM in particularwantsto thankOmarGil, whohasbeenagreatandpatientteacherá
, andGregoryRandallfor hisconstantsupportandencouragement.FM performedpartof thiswork whilevisitingâ theUniversityof Minnesota.ThisworkwaspartiallysupportedbyagrantfromtheOfficeof Naval ResearchONR-N00014-97-1-0509,ã
theOffice of Naval ResearchYoungInvestigatorAward,thePresidentialEarly CareerAwardsfor ScientistsandEngineers(PECASE),aNationalScienceFoundationCAREERAward,by theNationalScienceä
FoundationLearningandIntelligentSystemsProgram(LIS), by theComisionSectorialdeInvestigacionßCientå
ıfica (CSIC),theComisionAcademicadePosgrado(CAP),andTecnocomthroughascholarshipto FM.
REFERENCESæ
1. D. AdalsteinssonandJ.A. Sethian,A fastlevel setmethodfor propagatinginterfaces,Jç. Comput.Phys.118,
269(1995).
2. R. AlexanderandS.Alexander, Geodesicsin Riemannianmanifoldswith boundary, IndianaUniv. Math. J.
30,è 481(1981).
3.é
S.Alexander, I. D. Berg,andR.L. Bishop,TheRiemannianobstacleproblem,Illinoisê
J. Math.31,è 167(1987).
4. L. AmbrosioandN. Dancer, Calculusë
ofVariationsandPartial DifferentialEquations, TopicsonGeometricalEvolutionProblemsandDegreeTheory(Springer-Verlag,New York, 2000).
5.ì
L. AmbrosioandH. M. Soner, Level setapproachto meancurvatureflow in arbitrarycodimension,Jç. Diff.
Geom.43,è 693(1996).
6.í
A. BartesaghiandG.Sapiro,A systemfor thegenerationof curveson3D brainimages,Hum.î
Brain Mapping
14,è 1 (2001).
7.ï
T.J.BarthandJ.A. Sethian,Numericalschemesfor theHamilton–Jacobiandlevel setequationsontriangulateddomains,J
ç. Comput.Phys.145,è 1 (1998).
8.ð
M. Bertalmio,L. T. Cheng,S.Osher, andG.Sapiro,Variationalproblemsandpartialdifferentialequationsonimplicit surfaces:Theframework andexamplesin imageprocessingandpatternformation,IMA Universityof Minnesota,preprint,June2000.
9.ñ
Blitz++ website:availableat ò ò ò ó ô ô õ ö ÷ ø ù ú û ü ó ô ù ý þ ÿ � ú � � .�10. J.Bloomenthal,Introductionto Implicit Surfaces(Kaufmann,SanFrancisco,California,1997).
11. M. BoueandP. Dupuis,Markov chainapproximationfor deterministiccontrolproblemswith affinedynamicsandquadraticcostin thecontrol,SIAMJ. Numer. Anal.36, 667(1999).

DISTÇ
ANCE FUNCTIONSAND GEODESICS 763È
12. A. M. Bruckstein,Onshapefrom shading,Comp.VisionGraph.ImageProc.44,è 139(1988).
13. V. Caselles,R. Kimmel, G. Sapiro,andC. Sbert,Minimal surfacesbasedobjectsegmentation,IEEE-PAMI
19,è 394(April 1997).
14. S. Chen,B. Merriman,S. Osher, andP. Smereka,“A simplelevel setmethodfor solvingStefanproblems,”J
ç. Comput.Phys.135,è 8 (1995).
15. D. L. Chopp,Someimprovementsof thefastmarchingmethod,SIAM�
J. Sci.Comput.,è in press.
16. L. T. Cheng,TheLevel SetMethodAppliedto GeometricallyBasedMotion, Material Science, and Image
Processing, Ph.D.ThesisDissertation(UCLA, June2000).
17. L. T. Cheng,P. Burchard,B. Merriman,andS. Osher, Motion�
of CurvesConstrainedon SurfacesUsing a
Le�
velSetApproach, UCLA CAM Report00-32(September2000).
18. L. D. CohenandR. Kimmel, Globalminimumfor active contoursmodels:A minimal pathapproach,Int. J.
Comput.ë
Vis. 24, 57 (1997).
19. M. G.CrandallandP. L. Lions,Two approximationsof solutionsof Hamilton–Jacobiequations,Math.�
Comp.
43�
,è 1 (1984).
20.�
M. G.CrandallandP. L. Lions,Viscositysolutionsof Hamilton–Jacobiequations,Trans.Am.Math.Soc.277
(1983).
21. E. Dijkstra,A noteon two problemsin connectionwith graphs,Numerisc�
heMath.1,è 269(1959).
22.�
M. Desbrun,M. Meyer, P. Scroeder, andA. Barr, Discretedifferential-geometryoperatorsin n� D,Ç
Caltech,USC
Report(July22,2000).
23. S.Fomel,A variationalformulationof thefastmarchingEikonalsolver, StanfordExplorationProject,ReportSERGEYä
, May 1 (May 2000),pp.357–376.
24. R. L. Foote,Regularityof thedistancefunction,Proc.Am.Math.Soc.92�
(September
1984).
25. S. F. Frisken,R. N. Perry, A. Rockwood,andT. Jones,Adaptively sampledfields:A generalrepresentationofß shapefor computergraphics,in Computer
ëGraphics(SIGGRAPH)(Ne
w Orleans,July2000).
26. J.GomesandO. Faugeras,Representingandevolving smoothmanifoldsof arbitrarycodimensionembeddedin IRn� asØ theintersectionof n hypersurfaces:Thevectordistancefunctions,RR-4012INRIA (Oct.2000).
27.�
J. Helmsen,E. G. Puckett, P. Collela, and M. Dorr, Two new methodsfor simulatingphotolithographydeÜ
velopmentin 3D, Pr�
oc.SPIEMicrolithographyIX�
, 253(1996).
28. P. Hoch andM. Rascle,Hamilton–Jacobiequationson a manifold andapplicationsto grid generationorrefinement,availableat � � � � � � � � � � � � � � � � � � � � � ! " � # $ % & $ ' ( ) * + , - ) ' $ . / 0 . 1 ( ) .�
29. H. Ishii, A simpledirectproofof uniquenessfor solutionsof theHamilton–Jacobiequationsof Eikonaltype,Proc.Amer. Math.Soc.100, 247(1987).
30.é
N. Khaneja,M. I. Miller, andU. Grenander, Dynamicprogramminggenerationof geodesicsandsulci onbrain2
surfaces,IEEEê
Trans.PatternAnal.Mach. Intelligence20
,è 1260(1998).
31.é
R. Kimmel, Numerical�
Geometryof Images: Theory, Algorithms,and Applications,è TechnionCIS Report9910ñ
(October1999).
32.é
R.Kimmel andJ.A. Sethian,Computinggeodesicpathsonmanifolds,Pr�
oc.Nat.Acad.Sci.95, 8431(1998).
33.é
N. Kiryati andG. Szekely, Estimatingshortestpathsandminimal distanceson digitized threedimensionalsurfÝ aces,PatternRecognition26,è 1623(1993).
34.é
V. KrishnamurthyandM. Levoy, Fitting smoothsurfacesto densepolygonmeshes,Comput.Graph. 313é
(1996).
35.é
J.C. Latombe,Robot3
MotionPlanning(Kluwer Academic,Boston,1991).
36.é
F. Lafon and S. Osher, High order two dimensionalnonoscillatorymethodsfor solving Hamilton–JacobiscalarÝ equations,J
ç. Comput.Phys.123, 235(1996).
37.é
J.M. Lee,Riemannian3
Manifolds,An Introductionto Curvature (Springer
-Verlag,New York, 1997).
38.é
C. MantegazzaandA. C. Menucci,Hamilton–JacobiequationsanddistancefunctionsonRiemannianmani-folds,4
availableat 5 6 6 7 8 9 9 : ; < = 6 > ? @ ? > A 6 9 7 B 7 C D ? 9 = B @ = C @ E E 9 .
39.é
A. MarinoandD. Scolozzi,Geodeticheconostacolo,Boll. Un. Mat. Ital. 6 (1983).
40.F
S. Mauch,Closestpoint transform,availableat G G G H I J I H K I L M N K O H N P Q R S T U V W X Y T Z [ \ ] V ^ U Y _ ` \ Y _ ` \ ab c d e f

764È
MEMOLI AND SAPIRO
41.F
F. Memoli, G. Sapiro,andS.Osher, Harmonicmapsontoimplicit manifolds,preprint,March2001.
42. J.S.B. Mitchell, An algorithmicapproachto someproblemsin terrainnavigation,Artif. Intelligence37g
, 171(1988).
43.F
J.S.B. Mitchell, D. Payton,andD. Keirsey, Planningandreasoningfor autonomousvehiclecontrol, Int.ê
J.
Intelligê
entSyst.2, 129(1987).
44. S. Osher, A level-setformulationfor the solutionof the Dirichlet problemfor Hamilton–Jacobiequations,SIMAJ. Numer. Anal.24,è 1145(1993).
45. S.J.OsherandR. P. Fedkiw, Level setmethods,UCLA CAM Report00-07(February2000).
46.F
S. J. Osherand J. A. Sethian,Frontspropagationwith curvaturedependentspeed:Algorithms basedonHamilton–Jacobiformulations,J
ç. Comput.Phys.79,è 12 (1988).
47. D. Peng,B. Merriman,S.Osher, H. Zhao,andM. Kang,A PDE-basedfastlocal level setmethod,Jç. Comput.
Phys.155,è 410(1999).
48.F
F. P. PreparataandM. I. Shamos,Computationalë
Geometry, Texts andMonographsin ComputerScience(Springer-Verlag,New York, 1990).
49.F
E.RouyandA. Tourin,A viscositysolutionsapproachto shape-from-shading,SIAM.h
J. Numer. Anal.29
,è 867(1992).
50. T. Sakai,RiemannianGeometry, AMS Translationsof MathematicalMonographs149(Providence,1996).
51. J. Sethian,Fastmarchinglevel setmethodsfor three-dimensionalphotolithographydevelopment,in Proc.SPIEInternationalSymposiumonMicrolithography, SantaClara, California, March 1996.�
52. J.A. Sethian,A fastmarchinglevel-setmethodfor monotonicallyadvancingfronts,Proc.Nat.Acad.Sci.93,1591(1996).
53. J. A. Sethian,Le�
vel SetMethods:EvolvingInterfacesin Geometry, Fluid Mechanics,ComputerVision and
MaterialsSciences(Cambridge
Univ. Press,Cambridge,UK, 1996).
54. L. Simon,TheoremsonRegularity andSingularityof EnergyMinimizingMaps(Birkhauser, Boston,1996).
55. G. Taubin,Estimationof planarcurves,surfaces,andnonplanarspacecurvesdefinedby implicit equationswith applicationsto edgeandrangeimagesegmentation,IEEETrans.PAMI 13,è 1115(1991).
56. A. W. Toga,Bri
ain Warping (AcademicPress,New York, 1998).
57. P. Thompson,R. Woods,M. Mega, and A. Toga, Mathematical/computationalchallengesin creatingde-formableandprobabilisticatlasesof thehumanbrain,HumanBrain Mapping9, 81 (2000).
58. Y. Tsai,“Rapid andaccuratecomputationof thedistancefunctionusinggrids,” UCLA CAM Report00-36,October2000,availableatwww.math.ucla.edu.
59. J. N. Tsitsiklis, Efficient algorithmsfor globally optimal trajectories,IEEEê
Trans.Autom.Control 40,è 1528(1995).
60. D. C. Van Essen,H. Drury, S. Joshi,andM. I. Miller, Functionalandstructuralmappingof humancerebralcortex: Solutionsarein thesurfaces,Proc.Nat.Acad.Sci.95, 788(February1998).
61. B. Wandell,S.Chial,andB. Backus,Corticalvisualization,Jç. Cognit. Neurosci.12(5),
739(2000).
62. A. Witkin and P. Heckbert,Using particlesto sampleand control implicit surfaces,ComputerGraphics(SIGGRAPH),pp.269–278,1994.
63. F. E.Wolter, CutLoci in BorderedandUnborderedRiemannianmanifolds,DoctoralDissertation(TechnischeUniversitatBerlin, 1985).
64. Z. Wood,M. Desburn,P. Schroder, andD. Breen,Semi-Regularmeshextractionfrom volume,in Proc.IEEE
Visualization2000.�
65. G. Yngve andG. Turk, “Creatingsmoothimplicit surfacesfrom polygonalmeshes,TechnicalReportGIT-GVU-99-42(Graphics,Visualization,andUsabilityCenter. GeorgiaInstituteof Technology, 1999),availableat j j j k l l k m n o p l q k p r s t m u s t m p v w p o x y t z s { | } l n o } v ~ � k q o w | k
66. A. Yezzi,S. Kichenassamy, P. Olver, andA. Tannenbaum,Geometricactive contoursfor segmentationofmedicalimagery, IEEETrans.MedicalImaging16, 199(1997).
67. H.Zhao,S.Osher,B.Merriman,andM. Kang,Implicit, non-parametricshapereconstructionfromunorganizedpointsusingavariationallevel setmethod,Comp.
ëVision ImageUnderstanding80, 295(2000).
68. G. Zigelman,R. Kimmel, andN. Kiryati, Texture MappingusingSurfaceFlatteningvia Multidimensional
Scaling,è Technion-CISTechnicalReport2000-01(2000).



![[Mairal,Bach,Ponce,Sapiro&ZissermanCVPR’08]videos.rennes.inria.fr/seminaire_Irisa/Vista/talk2_mairal.pdf · Discriminativesparserepresentations [Mairal,Bach,Ponce,Sapiro&ZissermanCVPR’08]](https://img.pdfslide.us/doc/110x75/5ffc37833cbed703e0663cea/mairalbachponcesapirozissermancvpra08-discriminativesparserepresentations.jpg)