Embed Size (px)
Citation preview

Extracting mathematical models defining index finger kinematics using symbolic regression
M.U. Kurse1, M. Schmidt2, H. Lipson3, Francisco J. Valero-Cuevas1,4 1Department of Biomedical Engineering, USC, Los Angeles, CA, [email protected]
2Computational Biology, Cornell University, Ithaca, NY 3Sibley School of Mechanical and Aerospace Engineering, Cornell University, Ithaca, NY
4Division of Biokinesiology and Physical Therapy, USC, Los Angeles, CA Abstract:
Estimating tendon excursion-joint angle relationships that define moment arm variations is a critical part of biomechanical modeling. The conventional approach has been to assume a specific mathematical form for these relationships and use experimental data to regress the parameters of these assumed mathematical functions. In contrast, here we propose a novel method that uses symbolic regression to simultaneously determine both the appropriate topology, i.e. the form of the mathematical expression, and the parameter values that best fit the experimental data. We demonstrate this method with synthetic data generated using a known model of the human index finger. Cross validation with realistic noise levels shows that this method can extract the correct form and parameter values for nonlinear tendon excursion-joint angle relationships even in the presence of noise.
Introduction:
Musculotendon routing determines how muscles interact with joints. Mathematically, this is defined by the moment-arm relationship (either constant or posture dependent) that maps muscle forces to joint torques, as well as tendon excursions to joint angle changes. While building anatomically realistic models of the musculotendon pathways is useful in studying human movement, obtaining analytical expressions describing the moment arm relationship is necessary to develop computationally efficient models to study dynamics and control of biomechanical systems (Eg. [1]). Posture-dependent moment arm variation is obtained from tendon excursion vs. joint angle relationships as described in [2]. Current methods of modeling assume a specific mathematical form for this relationship, usually a polynomial of a specific degree, and regress the parameters of this assumed model from experimental data. Here we present a technique that does not assume a specific mathematical model a priori, but simultaneously estimates both the topology, i.e. the elementary building blocks forming the mathematical expression, and the parameters, i.e. the coefficients and other constants accompanying each building block of the mathematical expression, from experimental data. We have demonstrated this concept of simultaneous exploration of model topologies and parameters in our earlier work on modeling tendon networks of the hand [3]. Here we perform this exploration using a software called EUREQA[4] to
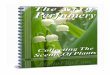
determine the functional mapping from joint angles to tendon excursions in a simulated model of an index finger. EUREQA implements a machine learning technique called symbolic regression that uses genetic programming to evolve mathematical expressions to model the available data. A population of models is evaluated iteratively to find a set of models that best map the inputs to the outputs (Figure 1). Using symbolic regression to model tendon excursion-joint angle relationships has the unique advantage that the results are analytical expressions, which are computationally simple to model and are anatomically interpretable. This is unlike other machine learning techniques that use a ‘black box’
approach to model input-output relationships. See [5] for the merits of different machine learning techniques.
Methods:
We generated data consisting of joint angles and corresponding tendon excursions for the human index finger using nonlinear expressions based on Landsmeer’s models I (constant moment arm) and III (bowstringing tendon) which have been used previously in the literature [1]. Each of these expressions formed the hidden target system, which was then inferred using symbolic regression. A single test or data point consisted of four inputs: the joint angles corresponding to ad-abduction (θadd) of the metacarpo-phalangeal joint (MCP) and
Figure 1: Symbolic regression using EUREQA

flexion extension of the MCP (θmcp), the proximal-interphalangeal (PIP) (θpip) and the distal-interphalangeal (DIP) (θdip) joints; and one output corresponding to the tendon excursion of each of the seven tendons actuating the index finger taken individually (s). A data set consisted of 300 such data points. This data set was presented to the symbolic regression software which ran in a parallel programming environment consisting of 15 quad-core computers.
To study the robustness of the algorithm to noise, we repeated the estimation by injecting experimentally realistic noise to the dataset (5% noise to the joint angle data and 1% noise to the tendon excursions).
Results:
Here we will present results for one of the seven tendons (FDP) to illustrate our point. The algorithm was successfully able to find accurate expressions for the other tendons as well. As expected, the algorithm found multiple feasible solutions that mapped the joint angle inputs to the tendon excursions.
Tab. 1 shows the hidden target expression along with one sample evolved model for each noise level. Tab. 2 shows the errors obtained on evaluation of these models with training, interpolation and extrapolation test data.
Discussion: These results show that symbolic regression can effectively estimate non-linear tendon excursion vs. joint angle relation- ships, even with noisy data. Understandably, the cross validation errors with extrapolation data are larger, indicating that it is important for us to collect experimental data for the entire range of interest.
We are currently working on estimating the moment arm relationships in the human index finger using experimental data collected from cadaveric specimens (Figure 2).
Extraction of such analytical relationships is important to develop computationally efficient dynamic models for simulation and control.
References: [1] Brook, N., Mizrahi, J., Shoham, M., and Dayan, J., 1995.
“A biomechanical model of index finger dynamics”. Medical Engineering and Physics, 17(1), pp. 54–63.
[2] An, K. N., Takahashi, K., Harrigan, T. P., and Chao, E. Y., 1984. “Determination of muscle orientations and moment arms”. Journal of biomechanical engineering, 106, p. 280.
[3] Valero-Cuevas, F. J., Anand, V. V., Saxena, A., and Lipson, H., 2007. “Beyond parameter estimation: extending biomechanical modeling by the explicit exploration of model topology”. IEEE Trans Biomed Eng, 54(11), pp. 1951–64.
[4] Schmidt, M., and Lipson, H., 2009. “Distilling free-form natural laws from experimental data”. Science, 324(5923), p. 81.
[5] Valero-Cuevas, F. J., Hoffmann, H., Kurse, M. U., Kutch, J. J., and Theodorou, E. A., 2009. “Computational models for neuromuscular function”. IEEE Reviews in Biomedical Engineering, 2, pp. 110–135.
Acknowledgments: This material is based upon work supported by NSF Grants EFRI-COPN 0836042, BES-0237258, and NIH Grants AR050520 and AR052345 to FVC.
Table 1: Tendon excursion-joint angle expressions for the FDP.
Table 2: Root mean squared errors for the evolved model.
Figure 2: Experimental data collection from a cadaveric index finger
Motors Position encoders Load-cells