Embed Size (px)
Citation preview
Extended Gaussian Images
Berthold K. P. Horn
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
Gaussian Image
What is a Gaussian Image?
Gaussian Image
What is a Gaussian Image?
A mapping of surface normals of an object onto the unit sphere (Gaussian sphere.) Tail lies at the center of the
Gaussian sphere Head lies on the surface of
the Gaussian sphere.
Example
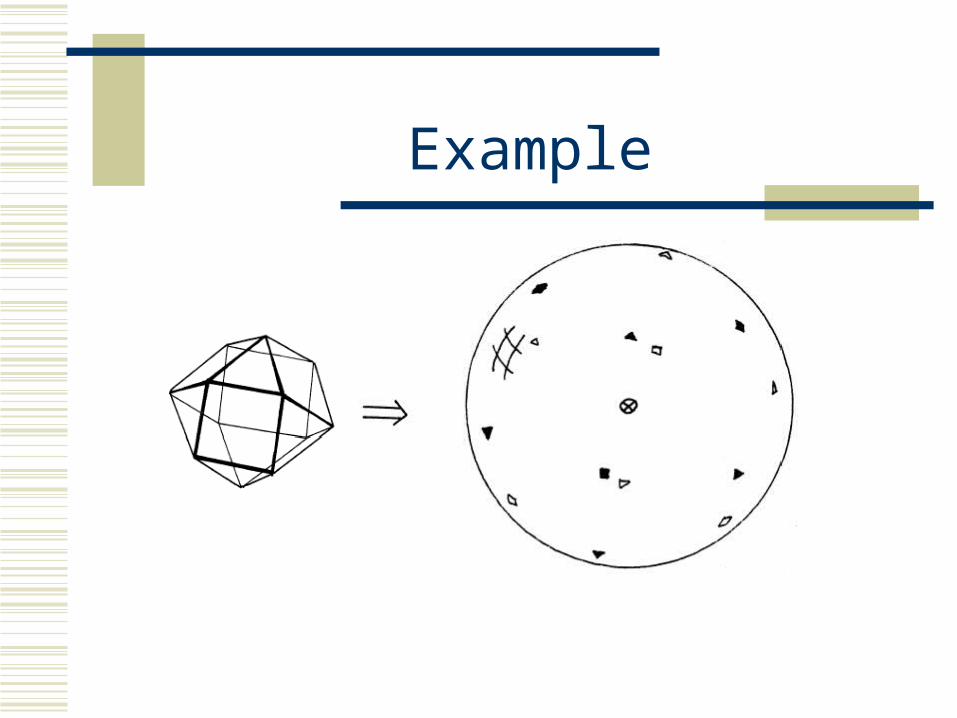
Example
Extended Gaussian Image
Extended to include area of each face. Place point mass on the sphere surface equal to
area of face at the head of each normal. Alternate representation: Scale the normal
proportional to area.
Properties
Face position information is lost. Which faces are connected? As long as the polyhedron is convex, its
extended Gaussian image is unique.Algorithms exist that extract a polyhedron from an
extended Gaussian Image.
Properties
Unaffected by translation Rotation of the object causes an equal
rotation of the extended Gaussian image. Center of mass lies at the origin of the
sphere.
Center of mass property proof
Imagine viewing a convex polyhedron from a great distance: is a vector from the object in the direction of the
viewer. is the unit normal at each face. is the surface area of each face. A face is visible if The apparent size due to foreshortening of a face is
v
is
0vsiiO
ii Ovs
Center of mass property proof
The apparent area of the visible surface is
When viewed from the opposite direction:
}0|{
)(vsi
ii
i
OvsvA
}0|{
)(vsi
ii
i
OvsvA
Center of mass property proof
Since the above two equations are equal, we have
Since this is true for all
That is, the center of mass of the extended Gaussian image is at the origin.
0} all{} all{
vOsOvs
iii
iii
v
0} all{
i
iiOs
Reconstructing a Tetrahedron
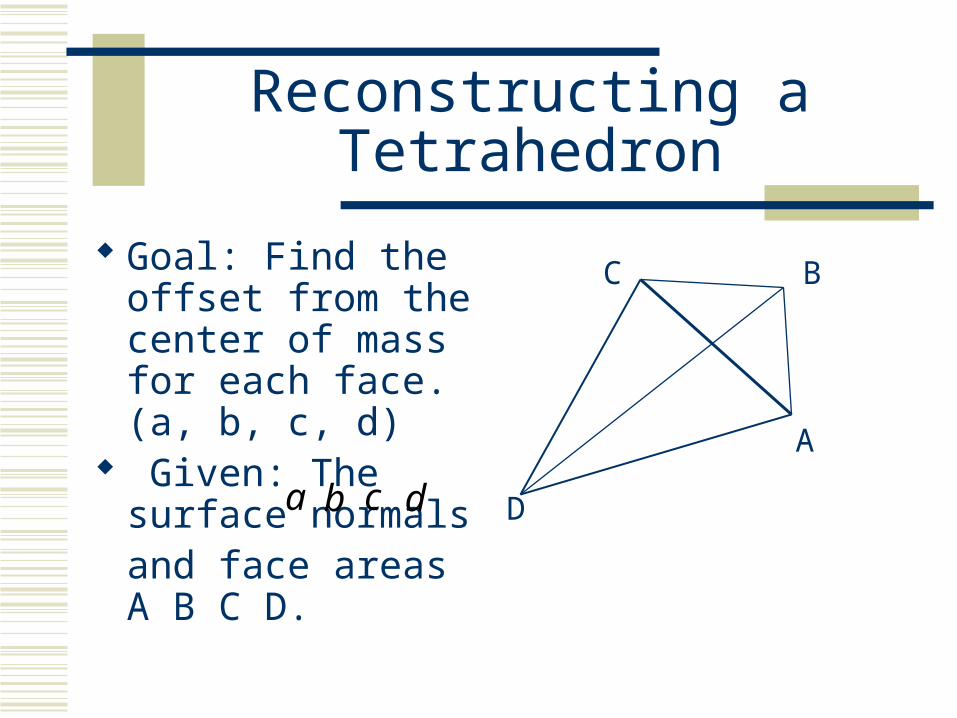
Goal: Find the offset from the center of mass for each face. (a, b, c, d)
Given: The surface normals and face areas A B C D.
D
A
C B
abcd
Reconstructing a Tetrahedron
Tetrahedron property: the distance from the center of mass to a face is ¼ the distance from that face to its opposite vertex.
Start by finding a formula for distance from face of area D to opposite vertex d. The desired distance, d, with be ¼ that.
Repeat for each vertex after doing a cyclical permutation of the variables.
Reconstructing a Tetrahedron
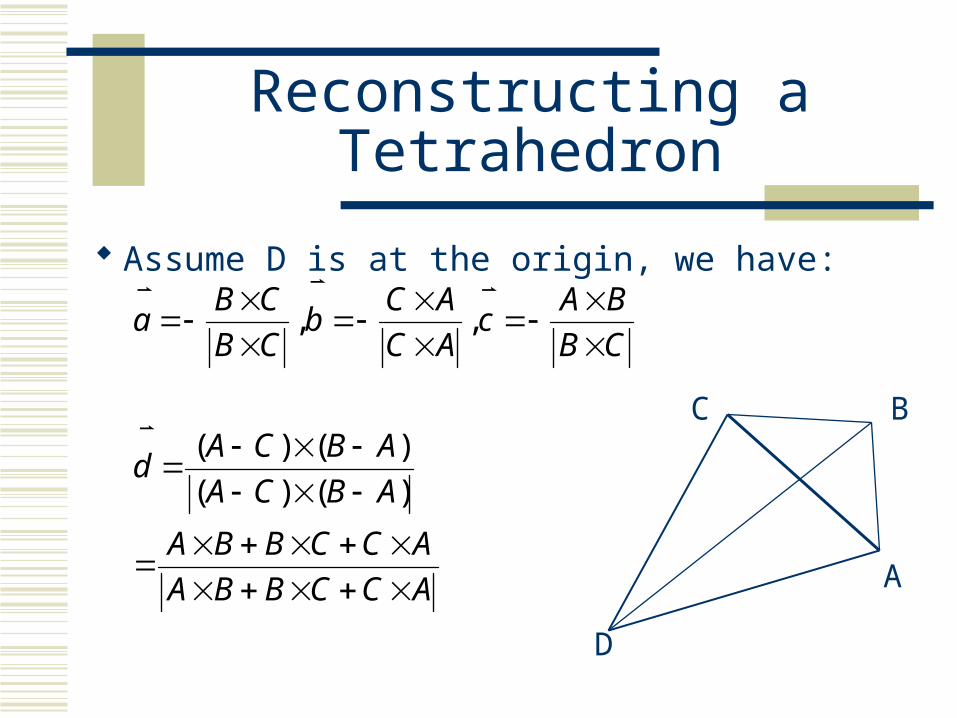
Assume D is at the origin, we have:
ACCBBA
ACCBBA
ABCA
ABCAd
CB
BAc
AC
ACb
CB
CBa
)()(
)()(
,,
D
A
C B
Reconstructing a Tetrahedron
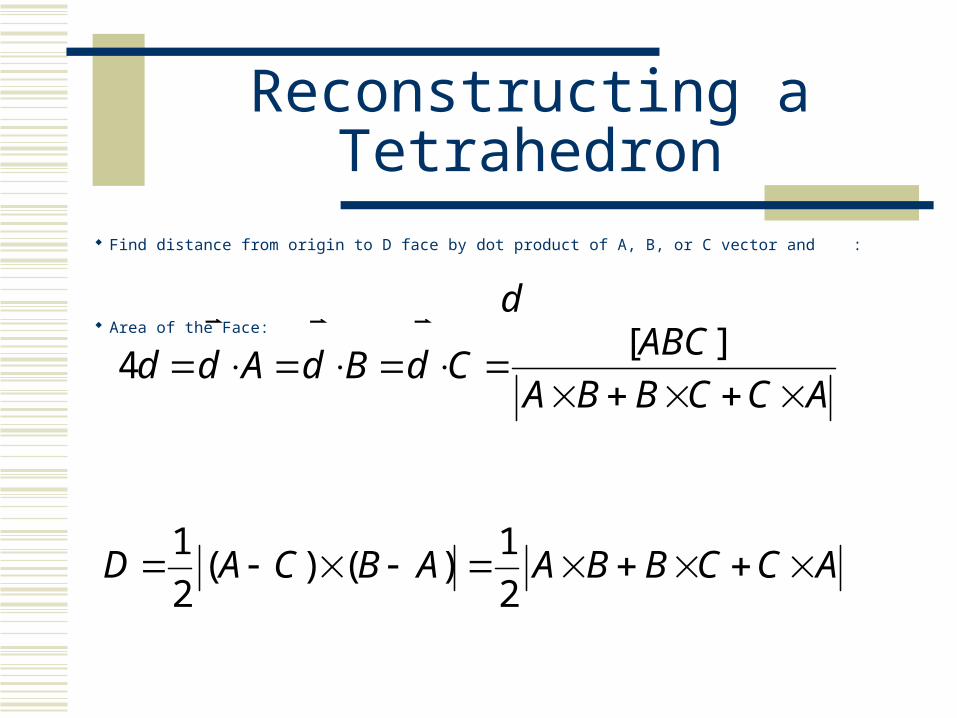
Find distance from origin to D face by dot product of A, B, or C vector and :
Area of the Face:
d
ACCBBA
ABCCdBdAdd
][4
ACCBBAABCAD 2
1)()(
2
1
Reconstructing a Tetrahedron
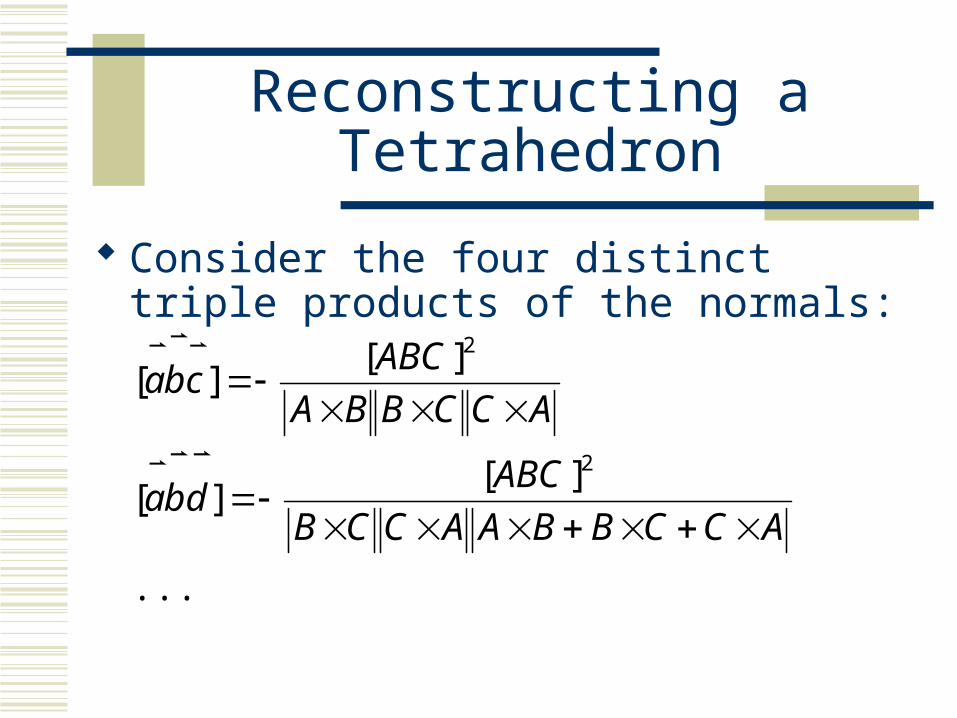
Consider the four distinct triple products of the normals:
...
][][
][][
2
2
ACCBBAACCB
ABCdba
ACCBBA
ABCcba
Reconstructing a Tetrahedron
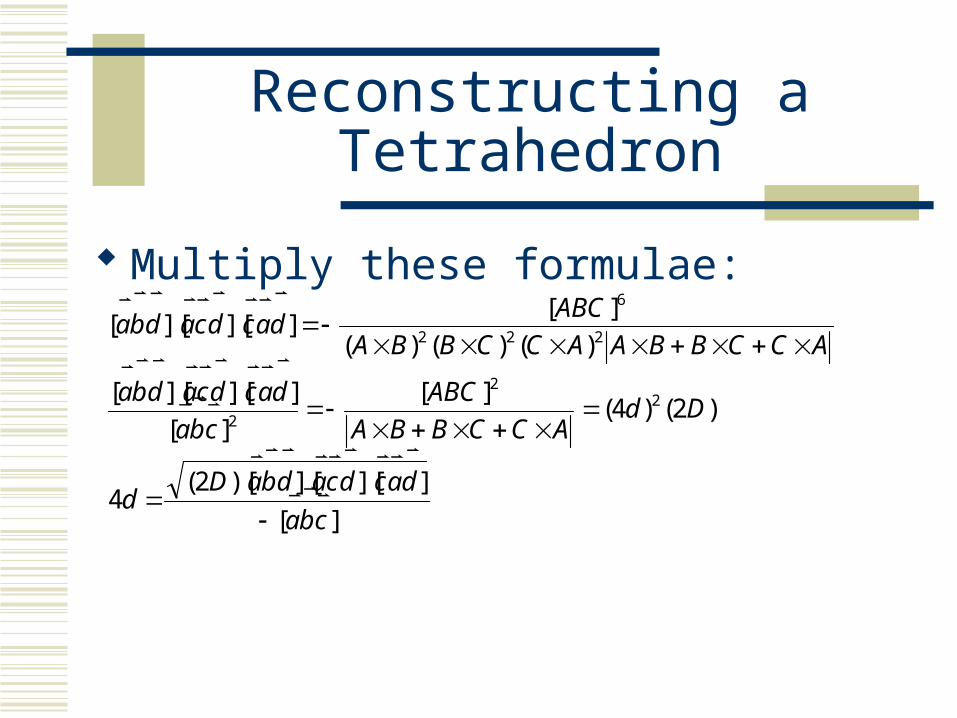
Multiply these formulae:
][
]][][)[2(4
)2()4(][
][
]][][[
)()()(
][]][][[
22
2
222
6
cba
dacdcadbaDd
DdACCBBA
ABC
cba
dacdcadba
ACCBBAACCBBA
ABCdacdcadba
Compute cyclic permutations of each face and use the previous equation to find the 4 distances of each face from the center of mass.
With the normals and distances from the center of mass, create 4 planes. The intersection of the planes creates the
tetrahedron.
Reconstructing a Tetrahedron
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
Gaussian Image
Create the same mapping between object normal and Gaussian sphere. Consider a small patch on the object. Each point in patch maps to a point on Gaussian
sphere.Creates a patch on the sphere
O
S
Gaussian Curvature
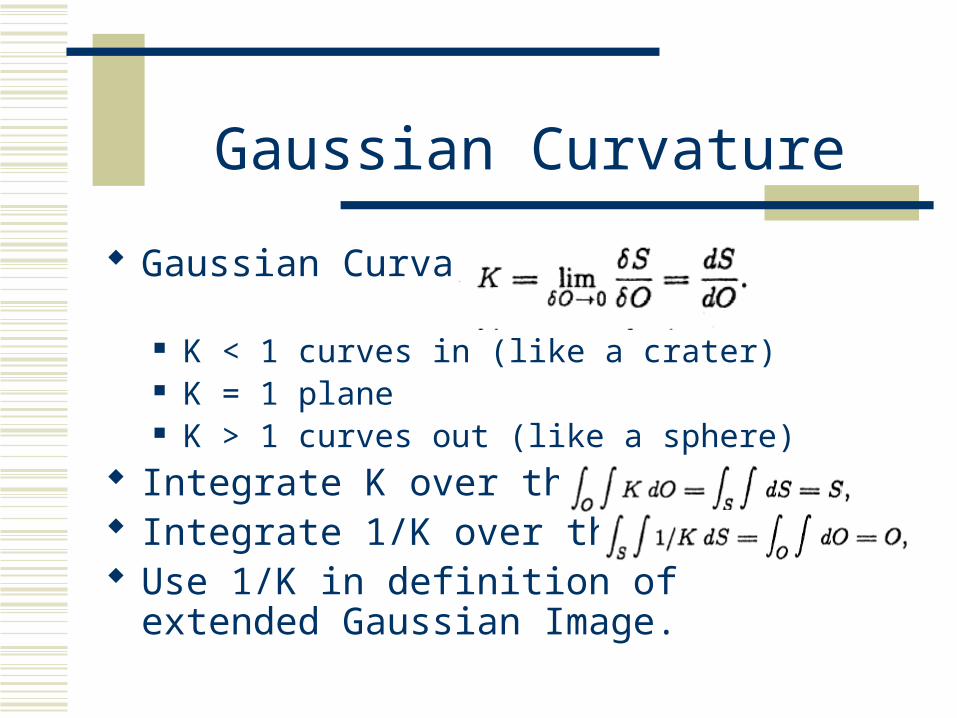
Gaussian Curvature:
K < 1 curves in (like a crater) K = 1 plane K > 1 curves out (like a sphere)
Integrate K over the object: Integrate 1/K over the sphere: Use 1/K in definition of extended Gaussian
Image.
Extended Gaussian Image
Associate 1/K of a point on the surface with corresponded point on Gaussian sphere. Let u, v be parameters to identify points on the
object. Let ξ, η be parameters to identify points on the
sphere. Extended Gaussian Image:
Properties
Center of mass at origin. Similar proof to discrete case
Total mass of extended Gaussian Image equals surface area of object.
Unaffected by translation Rotation of the object causes an equal
rotation of the extended Gaussian image.
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
Discrete Approximation
Break the surface into small patches. Create a surface normal for each patch. Consider the polyhedron formed by the
intersection of the planes tangent to each of these normals. Approximation of the original surface.
Discrete Approximation
How to break into small patches? Parameterize the model: u, v Find the normal:
ru and rv are found by differentiating the parametric form of the equation for the surface.
The area of a patch:No need to compute K
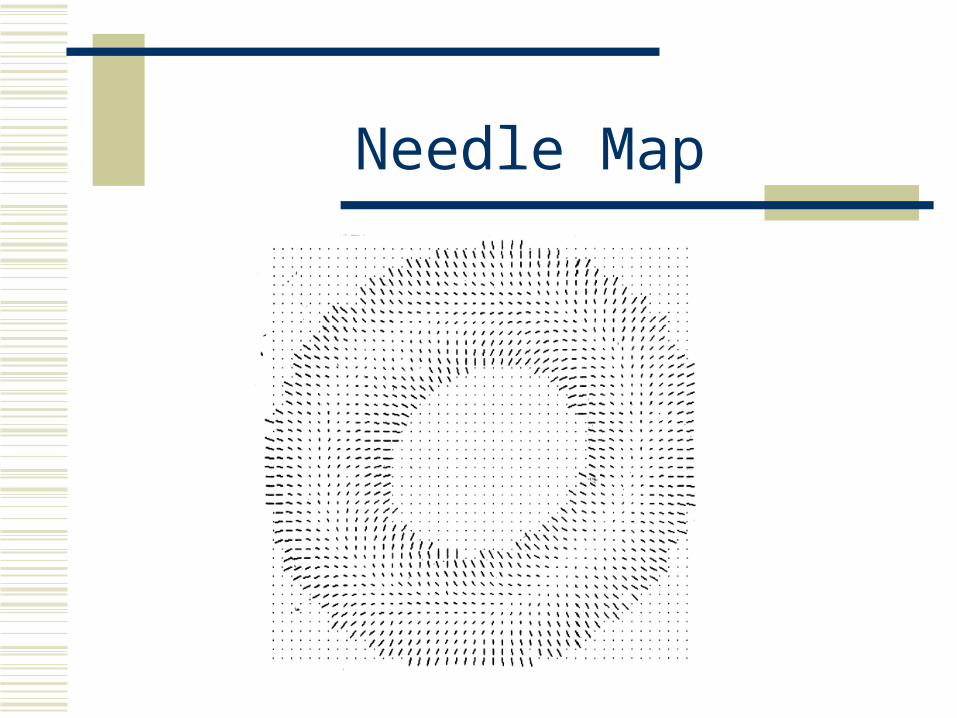
Needle Map
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
Tessellation
Need a way to represent in a computer Tessellate the Gaussian sphere Create a histogram of orientations
Tessellation Properties
All cells should have the same area. All cells should have the same shape. The cells should have regular shapes that are
compact. The division should be fine enough to provide good
angular resolution. For some rotation, the cells should be brought into
coincidence with themselves.
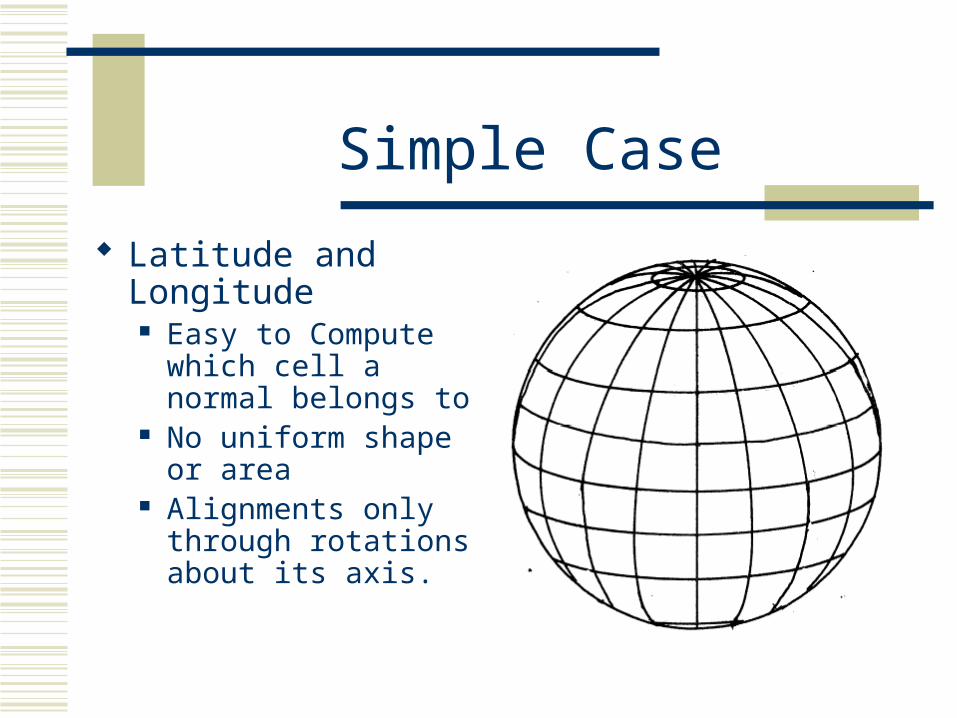
Simple Case
Latitude and Longitude Easy to Compute
which cell a normal belongs to
No uniform shape or area
Alignments only through rotations about its axis.
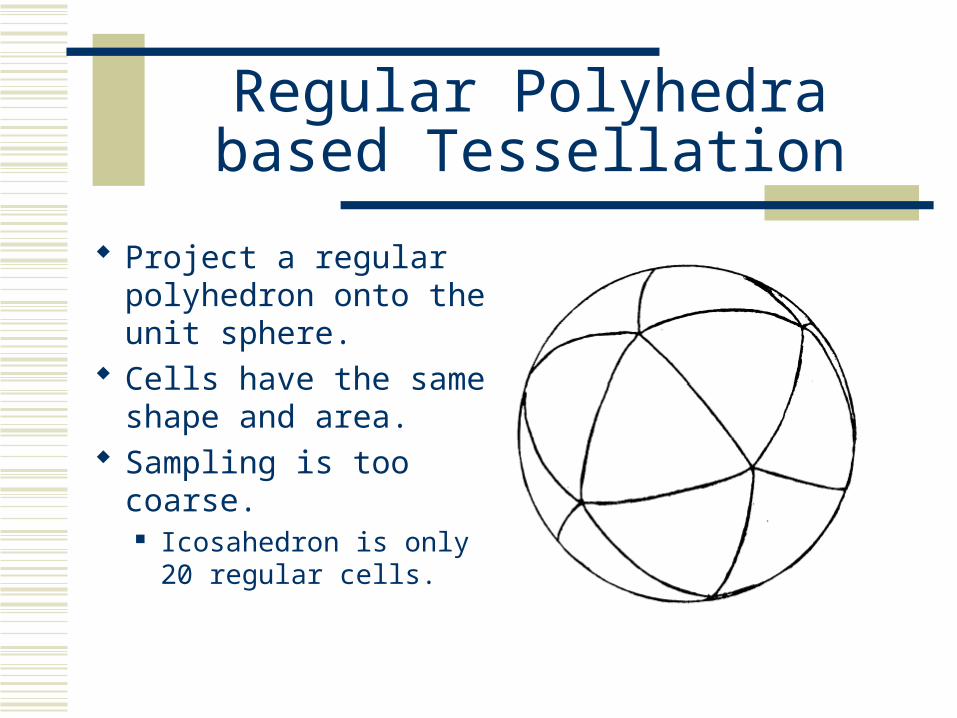
Regular Polyhedra based Tessellation
Project a regular polyhedron onto the unit sphere.
Cells have the same shape and area.
Sampling is too coarse. Icosahedron is only 20
regular cells.

Semi-Regular Polyhedra
Regular polygons for faces, but not the same polygon.
Higher polygon count Area difference
between the differing polygons could be significant.
Finer Subdivision
Each polygon can be sub-divided into triangles.
How fine do we need? Lower bound for angular spread with n cells:
Example from paper: n=240, θ=11.5
Geodesic Domes
Divide Triangular cells into four smaller triangles. All faces not same area or shape. Allows for arbitrary fineness. Start with pentakis dodecahedron or truncated
icosahedron. Each triangle edge is divided into f sections to create f2
triangles. Desire that f is a power of 2.
Geodesic Domes
Geodesic Domes
Create Histogram by assigning each normal to a cell on the tessellated Gaussian sphere.
Which cell does a normal belong to? Find dot product between given vector and normals from the
original regular polyhedron the dome is based on. Normal belongs to the face giving the greatest result.
Determine which triangle within the face Use the second greatest normal from above.
Proceed as above hierarchically. Binary search through the triangles In practice a lookup table is used
Orientation Histogram
Compute the number of normals in each cell. Count them Create the histogram
Store in computer as simple array. Display graphically with a normal for each
cell or as a grayscale image where the brightness of each cell is determined by the count.
Outline
Discrete Case: Convex Polyhedra Continuous Case: Smoothly Curved Objects Discrete Approximation: Needle Maps Tessellation of the Gaussian sphere:
Orientation Histograms Solids of Revolution
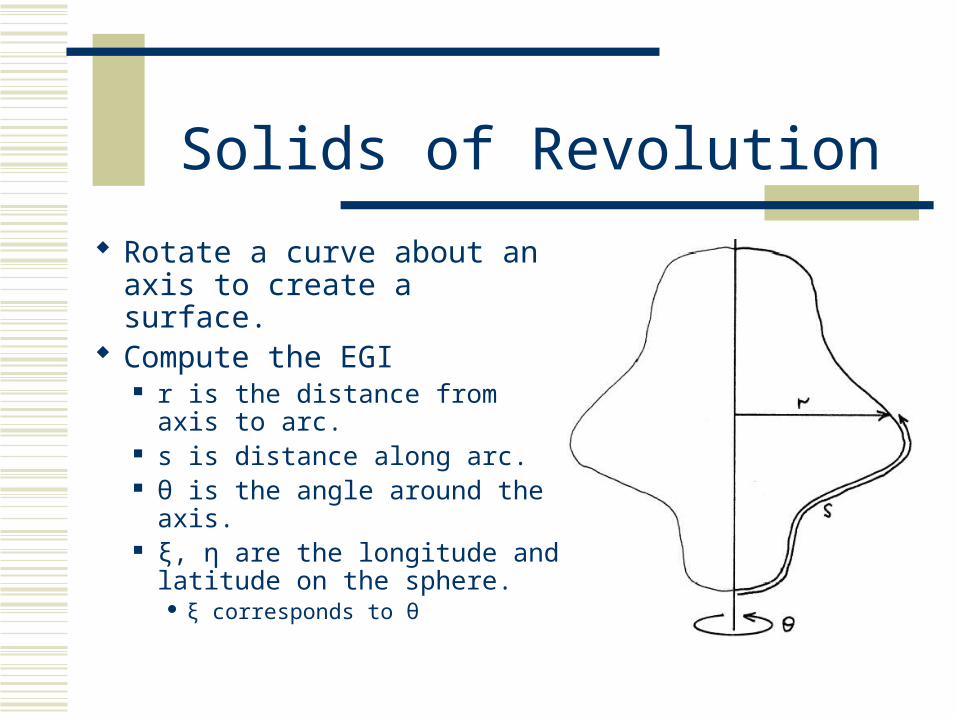
Solids of Revolution
Rotate a curve about an axis to create a surface.
Compute the EGI r is the distance from axis to
arc. s is distance along arc. θ is the angle around the axis. ξ, η are the longitude and
latitude on the sphere. ξ corresponds to θ
Gaussian Curvature
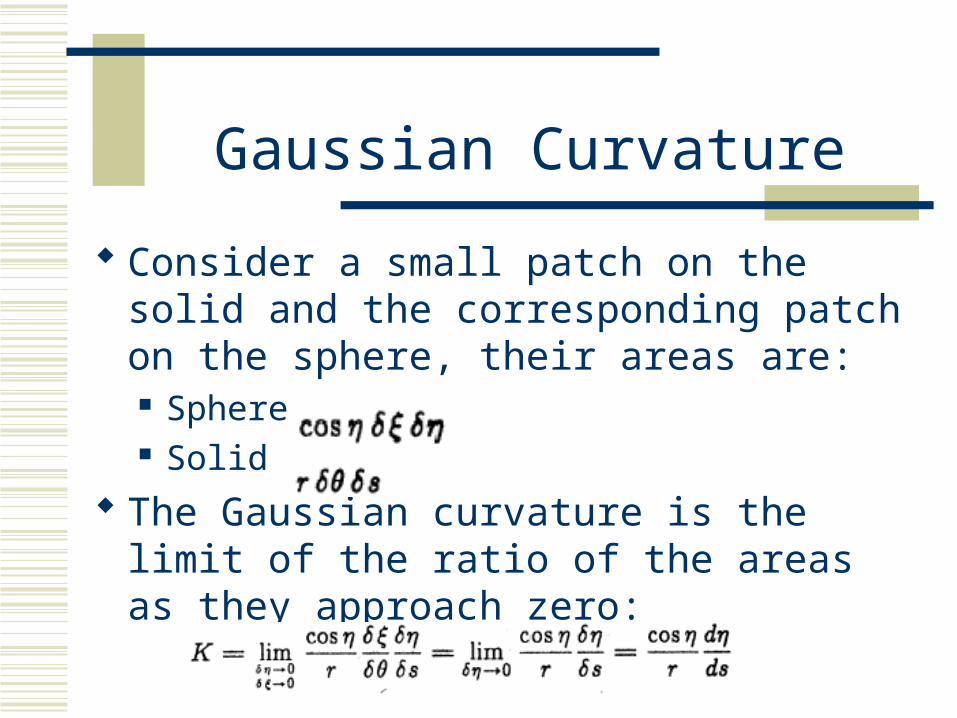
Consider a small patch on the solid and the corresponding patch on the sphere, their areas are: Sphere Solid
The Gaussian curvature is the limit of the ratio of the areas as they approach zero:
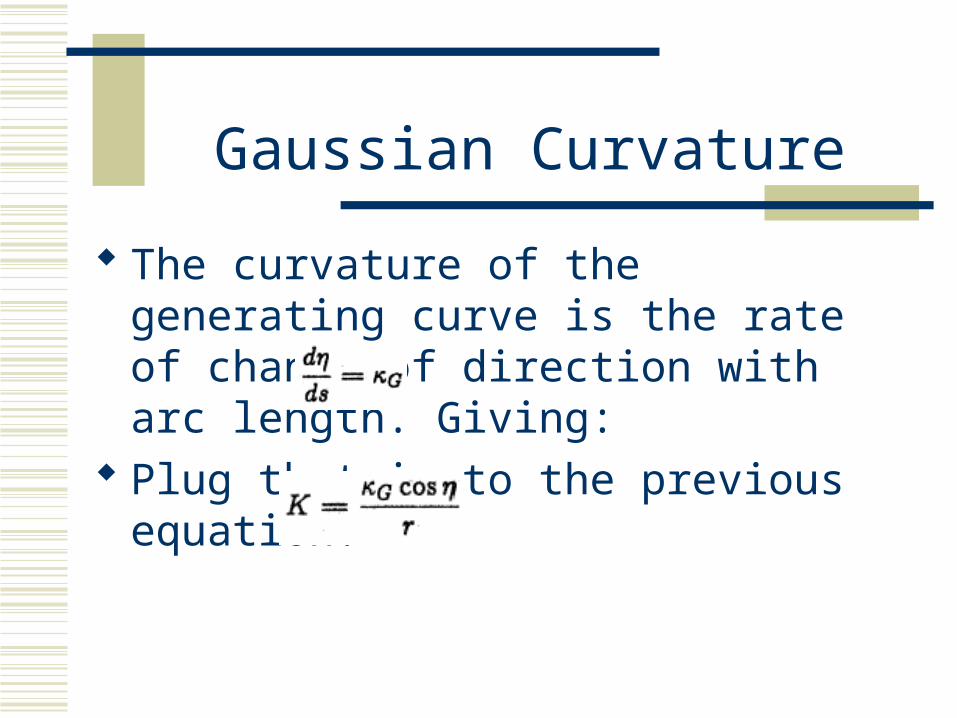
Gaussian Curvature
The curvature of the generating curve is the rate of change of direction with arc length. Giving:
Plug that in to the previous equation:
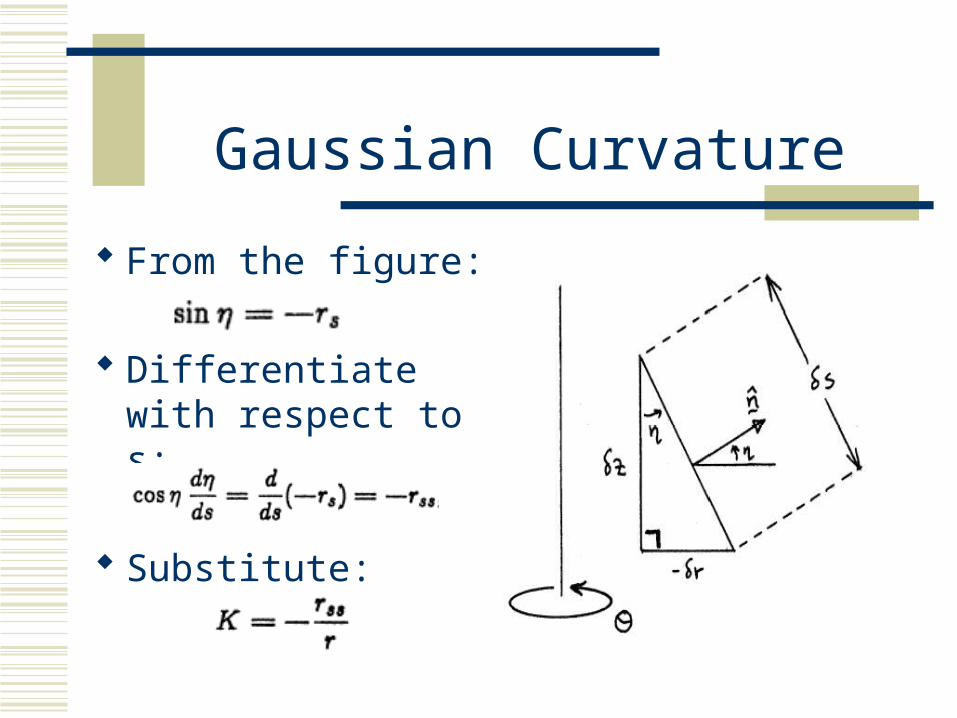
Gaussian Curvature
From the figure:
Differentiate with respect to s:
Substitute:
Gaussian Curvature
Sometimes we want to express r as a function of z.
From the figure: Differentiate with respect to s:
From the figure:
Substituting:
More Substituting:
Gaussian Curvature
Conclusion
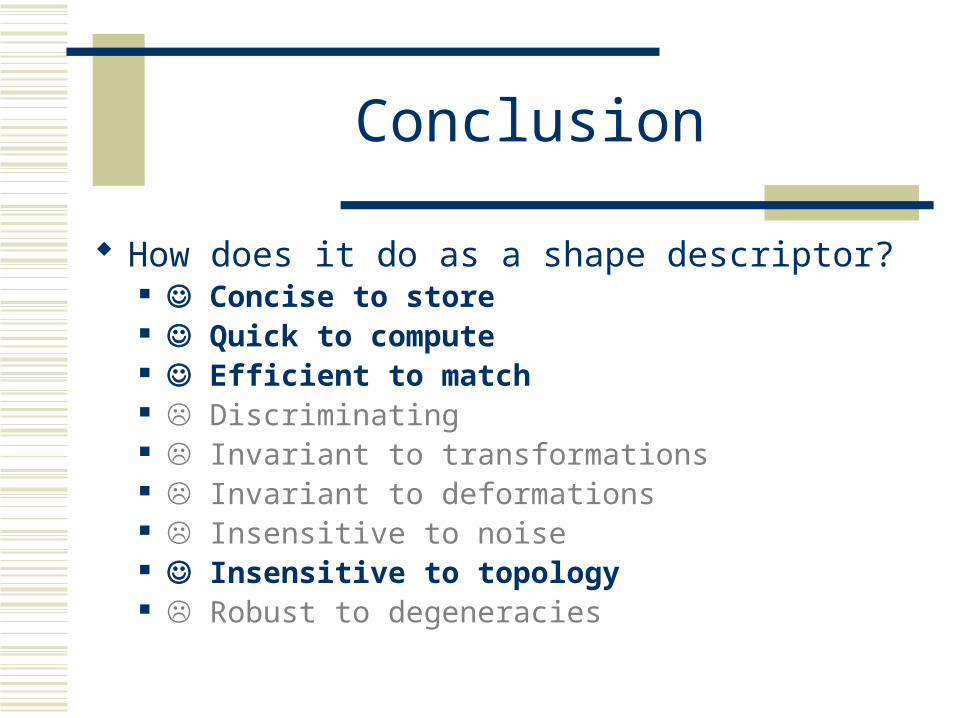
How does it do as a shape descriptor? Concise to store Quick to compute Efficient to match Discriminating Invariant to transformations Invariant to deformations Insensitive to noise Insensitive to topology Robust to degeneracies
Conclusion
How does it do as a shape descriptor? Concise to store Quick to compute Efficient to match Discriminating Invariant to transformations Invariant to deformations Insensitive to noise Insensitive to topology Robust to degeneracies




![POLYHEDRA - February 2006web.iyte.edu.tr/~gokhankiper/POLYHEDRA - A Historical...polyhedra, but associating them to the elements constructing the world [5] (Fig 7): Fig 7 Johannes](https://img.pdfslide.us/doc/110x75/6137cdd90ad5d2067648dc6d/polyhedra-february-gokhankiperpolyhedra-a-historical-polyhedra-but-associating.jpg)




![Convexity recognition of the union of polyhedra · Computational Geometry 18 (2001) 141–154 ... handbook of Discrete and Computational Geometry [9]. Converting a representation](https://img.pdfslide.us/doc/110x75/5ed929d86714ca7f476943a3/convexity-recognition-of-the-union-of-polyhedra-computational-geometry-18-2001.jpg)