Embed Size (px)
Citation preview
Exploring the vibration controlpotential of magneto-sensitive rubber
Peter Blom
Stockholm 2005
Licentiate Thesis
Royal Institute of Technology
School of Engineering Science
Department of Aeronautical and Vehicle Engineering
The Marcus Wallenberg Laboratory for Sound and Vibration Research

Akademisk avhandling som med tillstand av Kungliga Tekniska Hogskolan i Stock-holm framlaggs till offentlig granskning for avlaggande av teknologie licentiatexa-men torsdagen den 26:e maj 2005, kl 14.00 i sal MWL 74, Teknikringen 8, KTH,Stockholm.
TRITA-AVE -2005:18ISSN -1651-7660
c©Peter Blom, May 2005

Abstract Two new aspects of the dynamic behaviour in the audible fre-quency range of magneto-sensitive (MS) rubber are highlighted: the exis-tence of an amplitude dependence of the shear modulus—referred to as theFletcher–Gent effect—for even small displacements, and the appearance oflarge MS effects. These results have been obtained experimentally and aresubsequently used to model two examples of magneto-sensitive rubber isola-tors to show how by means of MS rubber they can be improved. The firstmodel calculates the transfer stiffness of a torsionally excited isolator andthe second one the energy flow into the foundation for a bushing insertedbetween a vibrating mass and an infinite plate. In both examples notableimprovements in isolation can be obtained.


Licentiate Thesis
This licentiate thesis consists of this summary and three appended paperslisted below and referred to as Paper A to Paper C.
Paper AP. Blom, L. Kari 2005: “Amplitude and frequency dependence of magneto-sensitive rubber in a wide frequency range”. Accepted by Polymer Testing.
Paper BL. Kari, P. Blom 2005: “Magneto-sensitive rubber in a noise reductioncontext—exploring the potential”. Submitted to Plastics, Rubber and Com-posites: Macromolecular Engineering.
Paper CP. Blom, L. Kari 2005: “Smart audio frequency energy flow control bymagneto-sensitive rubber isolators”. Submitted to Smart Materials and Struc-tures.


Contents
1 Introduction 1
2 Summary 22.1 Dynamic shear modulus measurements . . . . . . 22.2 Torsionally excited vibration isolator . . . . . . . 32.3 Vibration isolation rubber bushing . . . . . . . . 4
3 Future works 13
Acknowledgments 13
Paper A
Paper B
Paper C


1 Introduction
Materials have historically been categorized into two groups following theirfunctions: structural materials utilized for their mechanical properties andso-called functional materials, of interest because of their physical/chemicalproperties. From that early partition the situation has evolved notably; theterm intelligent or smart materials was coined some twenty years ago—beforethat, in the beginning of the last century the concept of multifunctional mate-rials denoting materials used for both their structural and physical/chemicalproperties was established—and research has since gained enormous cloutand become a common denominator in fields previously considered disparate,such as medicine and mechanics. Smart materials can very roughly be said tobe materials whose properties can be changed to meet changing conditions.Narrowing that wide concept down to that of magneto-sensitive materials theresearch into the field of magneto-sensitive materials was started in the endof the forties by Rabinow (1) who was working on magneto-sensitive fluids.Concurrently, Winslow (2) was working on electro-sensitive (ES) fluids. Intandem with their discoveries, research on MS and ES materials gained mo-mentum, but focus has until recently remained on ES materials. On the otherhand MS materials have proven more commercially successful enhancing thenotion of their large potential; this has lately prompted a large number ofpublications of research reports on MS fluids and solids alike (3; 4; 5; 6; 7).Magneto-sensitive rubber has become the subject of much research becauseof the wide presence of rubber in applications such as bushings and enginemounts for instance; the interest lies in the capability to dynamically changethe apparent rubber stiffness and damping, achieved by applying a magneticfield over a rubber containing iron particles. The application of a magneticfield gives rise to a magnetic dipole-dipole interaction between the iron par-ticles causing the apparent changes in stiffness and damping.
Whereas the quasi-static behaviour of MS rubber has lately been studiedextensively (8; 9; 10; 11; 12; 13), the dynamic properties, ranging into theaudible frequency range, have been given less attention. Nonetheless, consid-ering the above mentioned examples of engine mounts and bushings—theseare frequently subjected to vibrations ranging far into the audio frequencyrange—merely the quasi-static properties are not sufficient in describing therubber behaviour. Because of the viscous nature of rubber the viscoelas-tic behaviour needs also be incorporated in order to properly describe thecomplex characteristics of rubber. Some research performed in this dynamic
1
range has yielded promising results in displaying among other things largeresponses to externally applied magnetic fields. Kari (14) has studied theMS effects over the same frequency range as in this work; however, sincethe displacement amplitude was not constant, the influence of the Fletcher–Gent effect (15) alone could not be observed. Lokander and Stenberg (16)have studied amplitude phenomena in the low frequency range (< 50 Hz)thus considering the Fletcher–Gent effect, but only for strains of 1.1 % andmore. Bellan and Bossis (17), and Bossis, Coquelle and Kuzhir (18), havestudied the amplitude dependence and magnetic sensitivity of the E modu-lus for strains of varying order, but only for low frequencies (5 Hz and 1 Hzrespectively). In the first article include in this licentiate thesis the shearmodulus and its magnetic sensitivity in the audible frequency range havebeen studied from 100 to 1000 Hz. Due to this wide frequency span, visco-elastic effects are covered in addition to magnetic ones, while simultaneouslyat all strains allowing for observation of the Fletcher–Gent effect—the rubberis subjected to constant shear strains as small as 0.0084 %. In this mannera more complete understanding of the separate effects of magneto-sensitivematerials in the audible frequency range and their relative importance are ob-tained. Furthermore, the magneto-sensitivity is revealed to be surprisinglylarge, especially for small amplitudes. In the following two articles whichare theoretical applications based on the experimental results obtained fromthe first one it is shown how vibration isolators in two cases can be greatlyimproved by adopting magneto-sensitive rubber.
2 Summary
2.1 Dynamic shear modulus measurements
Three pair of samples, with an iron particle volume concentration 0, 26 and33 %, of natural and silicone rubber were tested. The particles are ran-domly dispersed within the rubber and irregularly shaped. Their size is lessthan 60 µm. A test rig (Fig.1) was designed for dynamic shear modulus mea-surements. Two test samples of dimensions L×W×T=20 mm×15 mm×2 mm(length, width and thickness), are sandwiched between two brass plates usedas fixtures. The excitation gives rise to a vertical motion that is transmittedby the brass plates to the test segments that in turn set the blocking massin motion. The magnetic field is generated by an electro-magnet made by a
2

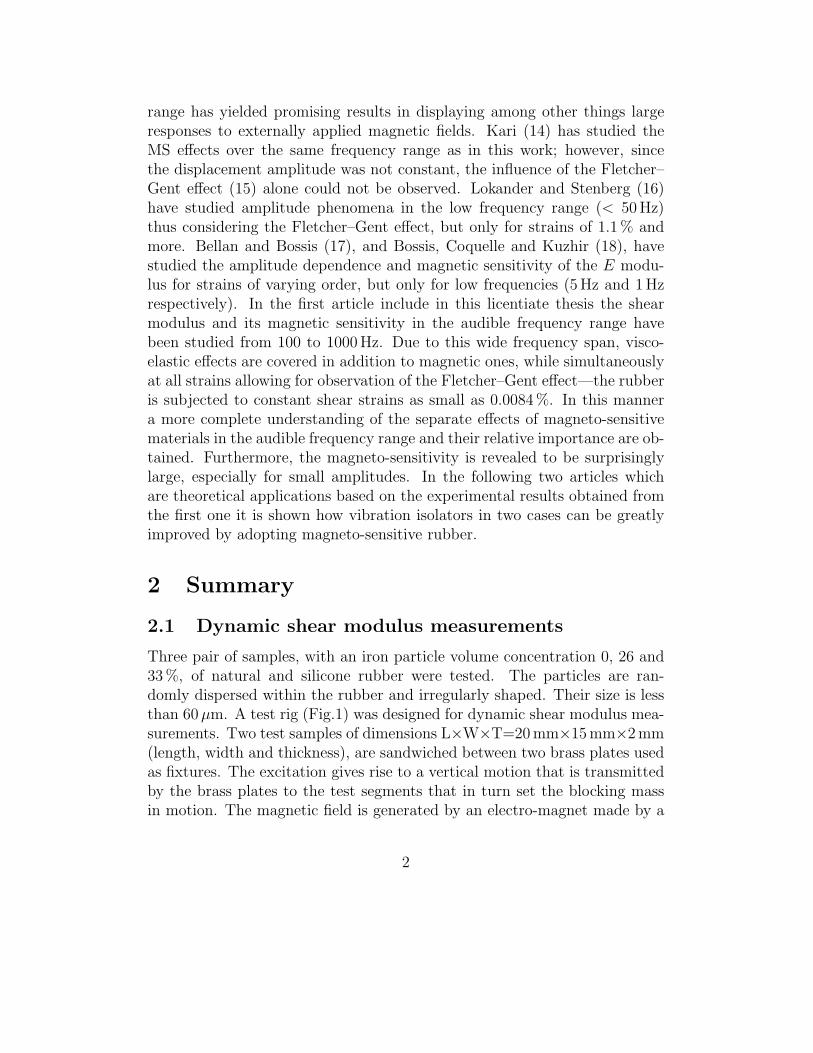
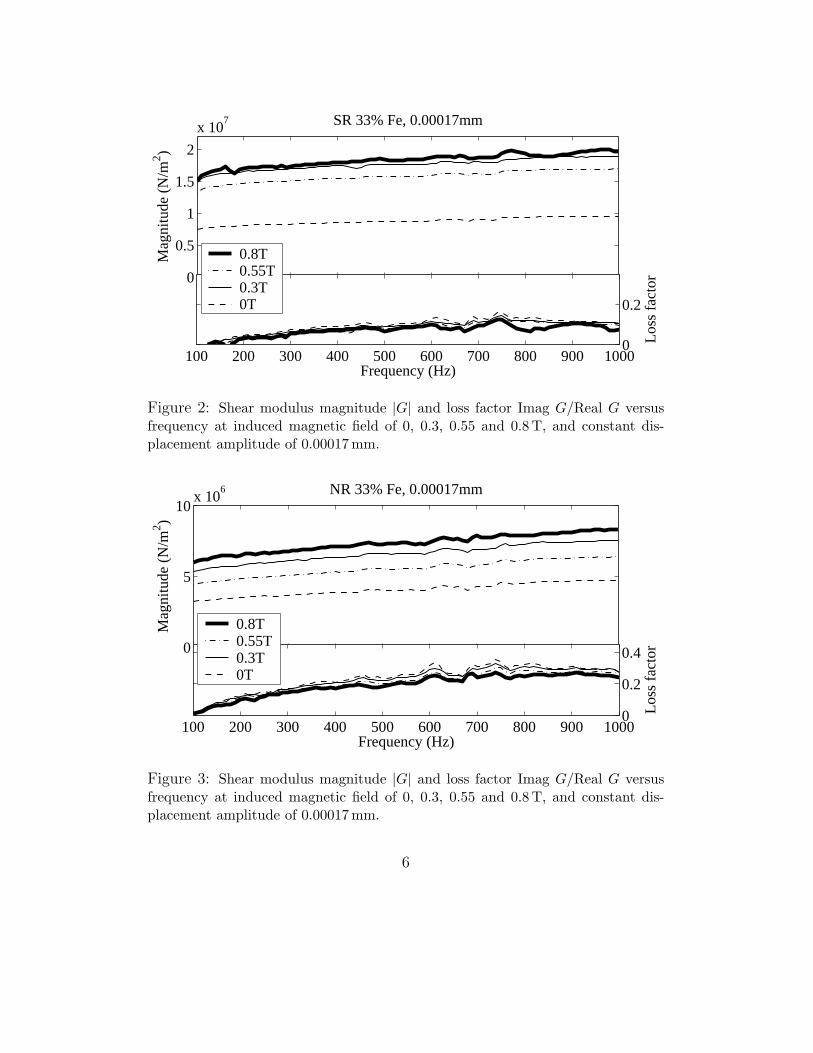
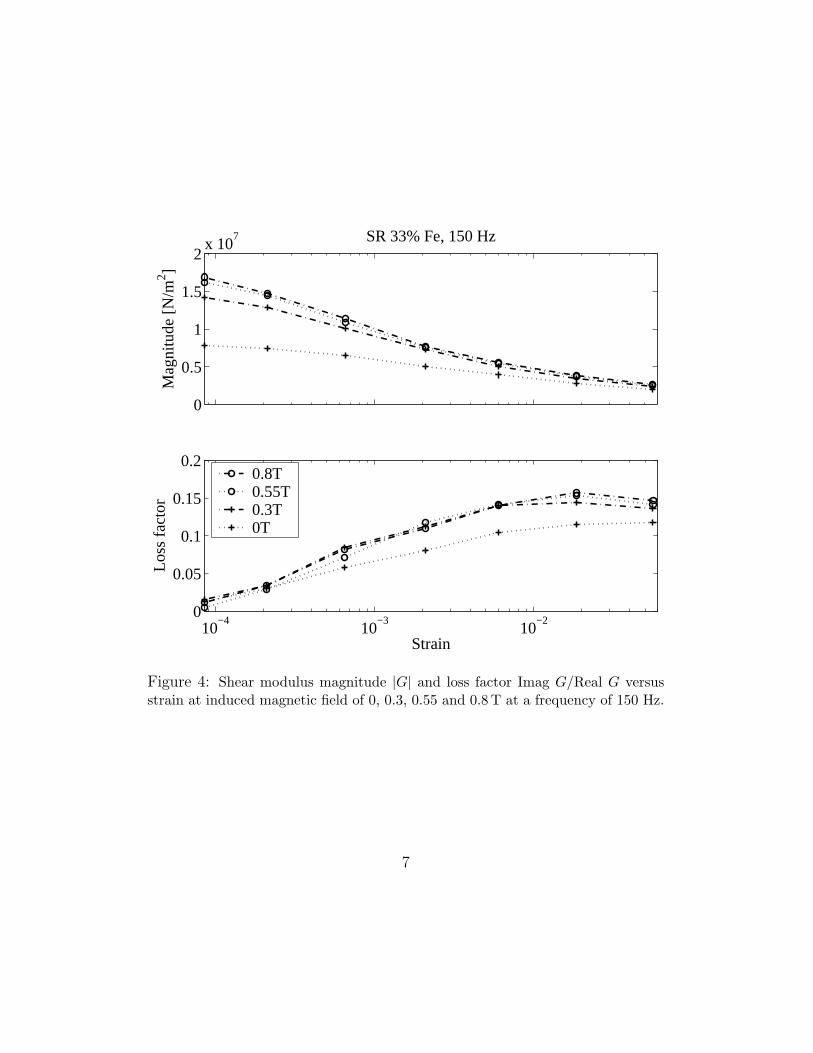
power-supplied coil wired round an iron C-frame directing a magnetic fieldperpendicularly to the shear direction. The excitation signal was a steppedsine signal, starting at 100 Hz and increasing with a constant frequency stepof 10 Hz to the maximum frequency—1000 Hz for the three smallest ampli-tudes. The amplitude of the signal was constant at all frequencies and setto seven different values, ranging from 0.11 mm to 0.00017 mm. The resultsfor the smallest amplitude for the silicone and natural rubber are displayedin Figs. 2 and 3. The strong magneto-sensitivity can be viewed in bothfigures for the magnitude of the shear modulus. Noteworthy is also the verysmall dependence of the loss factor on magnetic field, a fact that will greatlyfacilitate future modelling. The dynamic shear modulus for each of the twomaterials displays an amplitude dependence that is relatively large for eventhe smallest amplitudes. This can be deduced by comparing the curves inFigs. 4 and 5 representing shear modulus versus strain. Analysis of thosegraphs leads to the following: a decreasing vibration amplitude gives riseto an increasing magnitude and decreasing loss factor of the shear modulus.This behaviour derives from a phenomenon referred to as the Fletcher–Genteffect (15), whose influence on rubber subjected to small deformations isnormally negligible. However, our observations reveal that in the entire fre-quency range the Fletcher–Gent effect is a highly important feature of MSrubber, therefore not to be disregarded even for very small amplitudes—theseare of special interest in a structure-borne sound context where strains areoften of small order, comparable to the ones presented in these experiments.
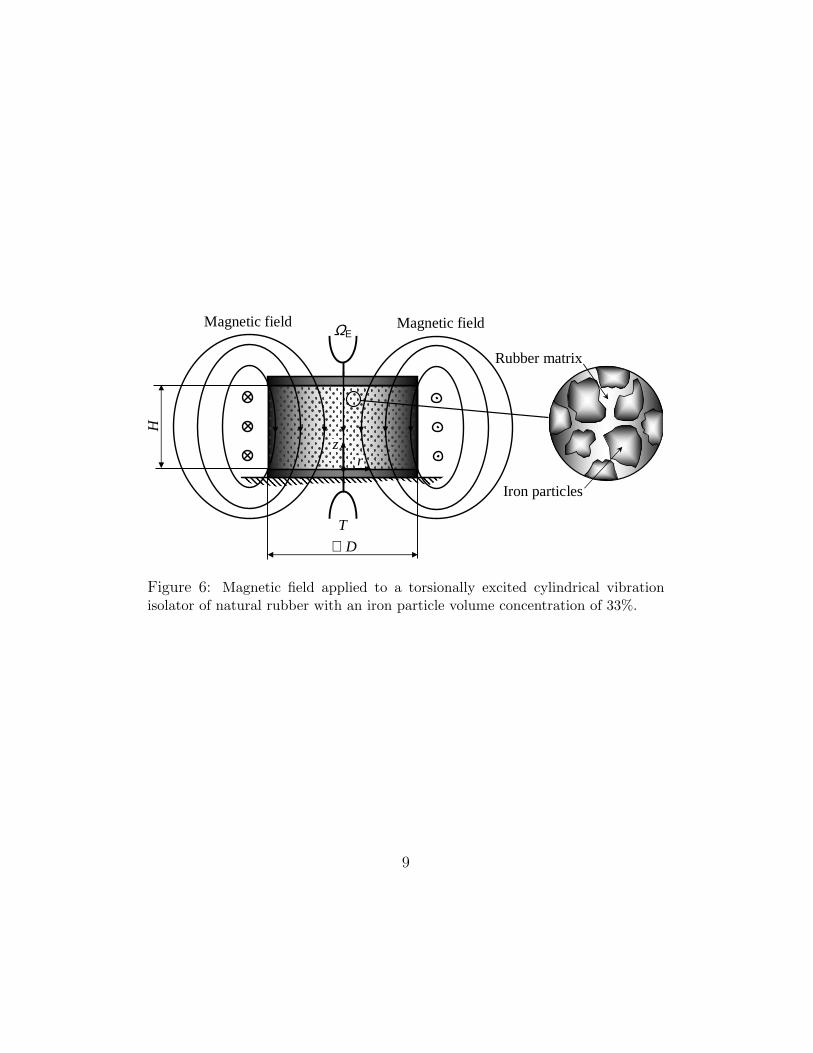
2.2 Torsionally excited vibration isolator
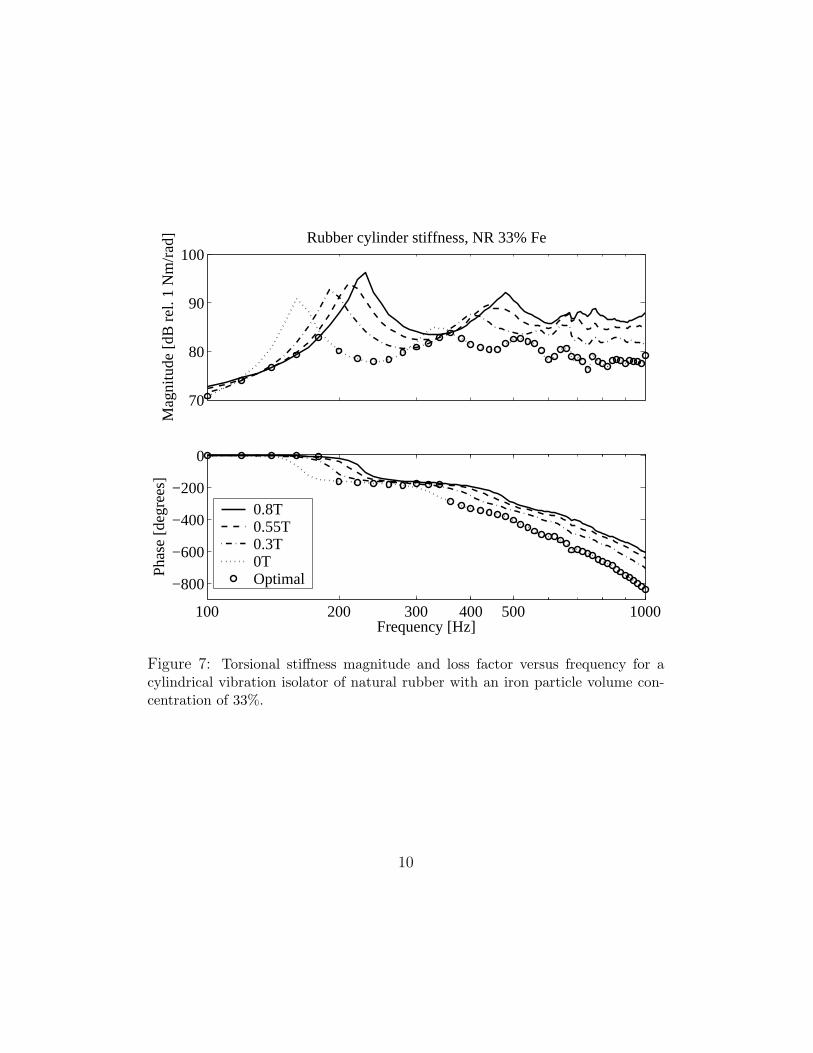
In this study a magneto-sensitive isolator’s audible dynamic stiffness is ofinterest. Consider the magnetic field exposed, cylindrical vibration in Fig.6,of height H=100 mm and diameter D=150 mm isolator, bonded to two cir-cular steel plates and torsionally excited by a rotation of Ωe radians at theupper lateral surface, while being blocked at the lower surface by an appliedtorsional moment of T Newton meters per radian. The magneto-sensitiverubber consists of natural rubber with an iron particle volume concentrationof 33%. For simplicity, assume a vibration displacement sufficiently small topermit a linearization with respect to amplitude while using the correspond-ing shear modulus at the smallest amplitude (corresponding to the smalleststrain in Fig.3). This results in a transfer stiffness according to Fig.7. Themagnitude graphs reveal an almost 15 dB drop at around 150 Hz obtained by
3

applying a magnetic field of 0.8 T. Once the 0 T dynamic stiffness peak hasbeen passed the magnetic field can be switched off according to the optimalpath graph. This is of course a reversible process, meaning that frequenciescan be shifted up and down and back and forth. Furthermore it can be donerapidly, due to iron’s magnetic properties.
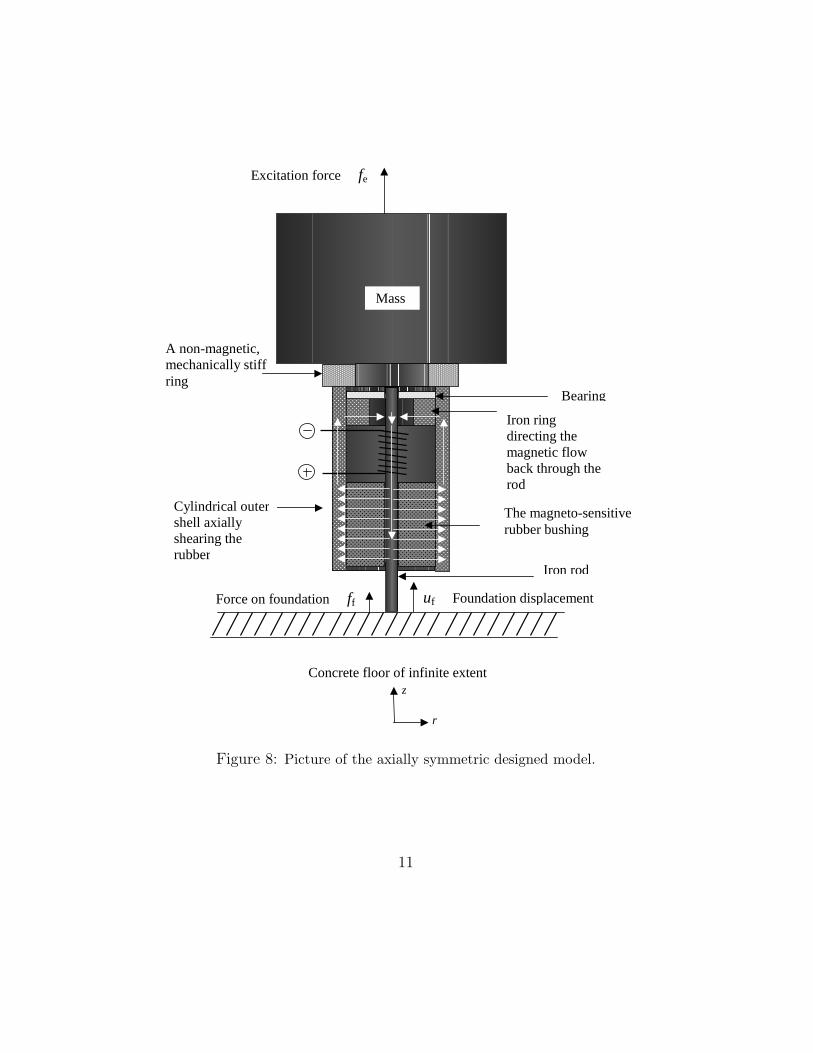
2.3 Vibration isolation rubber bushing
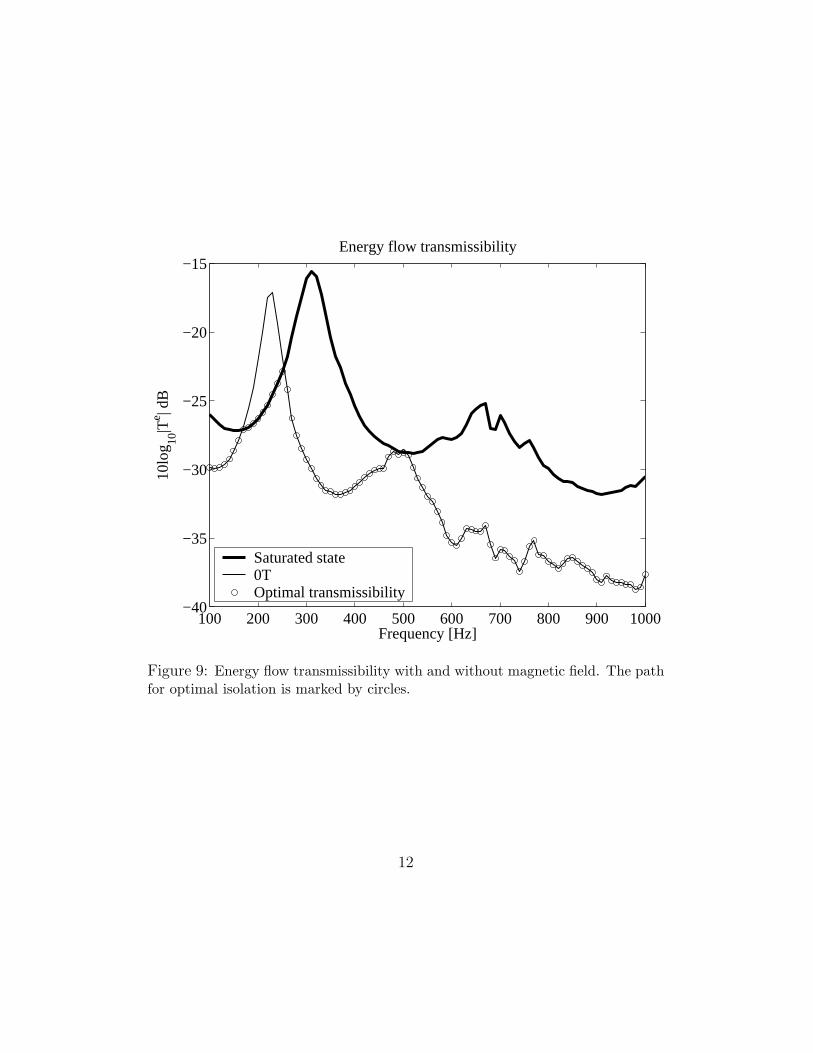
A rubber vibration isolator bushing is studied. The isolator standing ona concrete floor of infinite extent can be viewed in Fig.8. It consists ofa magneto-sensitive rubber bushing firmly bonded to an exterior circulariron shell. On the inside it is bonded to an iron rod connecting to thefloor. The cylindrical shell supports a force excited rigid mass acting as asimplified source model. Between the mass and the iron shell is depicted arigid non-magnetic ring whose mere function is to isolate the magnetic fieldfrom the mass. The magneto-sensitive rubber consists of natural rubber withan iron particle volume concentration of 33 %. For this rubber, the requiredshear modulus data at zero magnetic induction and at magnetic saturation isavailable from Fig.3 and is utilized in the model. Transmissibility with andand without applied magnetic field is displayed in Fig.9. Optimal isolationcorresponds to as low an energy flow transmissibility as possible, and it canbe seen that in a wide frequency range around 200 Hz a large reduction intransmitted energy is obtained when magnetically saturating the rubber. It isthe first internal anti-resonance—the first dynamic peak stiffness frequency—that can thus be shifted upwards in frequency by applying a magnetic field.In this manner a maximum reduction of approximately 7 dB is obtained.
4

Vibration exciter
Personal computer
Control ch: in1 Control level: 0.04v
Amplifier
Power supply
Charge amplifiers
Frequency analyser
Blocking mass
Test samples
Magnetic field
Wire coil
Accelerometers
Auxiliary isolators
Accelerometer
Figure 1: Measurement set-up
5
0
0.5
1
1.5
2
x 107 SR 33% Fe, 0.00017mm
Mag
nitu
de (
N/m
2 )
100 200 300 400 500 600 700 800 900 10000
0.2
Loss
fact
or
Frequency (Hz)
0.8T0.55T0.3T0T
Figure 2: Shear modulus magnitude |G| and loss factor Imag G/Real G versusfrequency at induced magnetic field of 0, 0.3, 0.55 and 0.8 T, and constant dis-placement amplitude of 0.00017 mm.
0
5
10x 10
6 NR 33% Fe, 0.00017mm
Frequency (Hz)
Mag
nitu
de (
N/m
2 )
100 200 300 400 500 600 700 800 900 10000
0.2
0.4Lo
ss fa
ctor
Frequency (Hz)
0.8T0.55T0.3T0T
Figure 3: Shear modulus magnitude |G| and loss factor Imag G/Real G versusfrequency at induced magnetic field of 0, 0.3, 0.55 and 0.8 T, and constant dis-placement amplitude of 0.00017 mm.
6
0
0.5
1
1.5
2x 10
7 SR 33% Fe, 150 Hz
Mag
nitu
de [N
/m2 ]
10−4
10−3
10−2
0
0.05
0.1
0.15
0.2
Loss
fact
or
Strain
0.8T0.55T0.3T0T
Figure 4: Shear modulus magnitude |G| and loss factor Imag G/Real G versusstrain at induced magnetic field of 0, 0.3, 0.55 and 0.8 T at a frequency of 150 Hz.
7

0
2
4
6
8x 10
6 NR 33% Fe, 150 Hz
Mag
nitu
de [N
/m2 ]
10−4
10−3
10−2
0
0.05
0.1
0.15
0.2
Loss
fact
or
Strain
0.8T0.55T0.3T0T
Figure 5: Shear modulus magnitude |G| and loss factor Imag G/Real G versusstrain at induced magnetic field of 0, 0.3, 0.55 and 0.8 T at a frequency of 150 Hz.
8
Magnetic field
Rubber matrix
Iron particles
ΩΕ
T
∅ D
H
Magnetic field
z r
Figure 6: Magnetic field applied to a torsionally excited cylindrical vibrationisolator of natural rubber with an iron particle volume concentration of 33%.
9
70
80
90
100Rubber cylinder stiffness, NR 33% Fe
Mag
nitu
de [d
B r
el. 1
Nm
/rad]
100 200 300 400 500 1000
−800
−600
−400
−200
0
Pha
se [d
egre
es]
Frequency [Hz]
0.8T0.55T0.3T0TOptimal
Figure 7: Torsional stiffness magnitude and loss factor versus frequency for acylindrical vibration isolator of natural rubber with an iron particle volume con-centration of 33%.
10
Force on foundation ff
Concrete floor of infinite extent
Excitation force fe
The magneto-sensitive rubber bushing
Cylindrical outer shell axially shearing the rubber
Iron rod
A non-magnetic, mechanically stiff ring
Mass
Iron ring directing the magnetic flow back through the rod
Bearing
uf Foundation displacement
z
r
Figure 8: Picture of the axially symmetric designed model.
11
100 200 300 400 500 600 700 800 900 1000−40
−35
−30
−25
−20
−15Energy flow transmissibility
Frequency [Hz]
10lo
g 10|T
e | dB
Saturated state0TOptimal transmissibility
Figure 9: Energy flow transmissibility with and without magnetic field. The pathfor optimal isolation is marked by circles.
12

3 Future works
Future works consists in creating a non-linear model—including the ampli-tude dependence—for the constitutive behaviour of the magneto-sensitiverubber based on the experimental results from the first article. A fractionalderivative representation will be employed to describe the viscoelastic be-haviour and a frictional model for the amplitude dependence. In addition tothis the magneto-sensitivity will be included in the model.
Acknowledgments
The financial support from the Swedish Research Council (Contract no: 621-2002-5643) is gratefully acknowledged. I would like to express my specialthanks to my supervisor Leif Kari for excellent guidance through the courseof this project. My thanks also to Kent Lindgren and Danilo Prelevic for pro-fessional and encouraging assistance in my experiments and to my colleaguesat MWL. Finally I thank my family and friends for their cordial support.
References
References
[1] Rabinow J 1948 The magnetic fluid clutch AIEE Trans. 67 1308-15
[2] Winslow W M 1949 Induced fibration of suspensions J. Appl. Phys. 201137-40
[3] Occhiuzzi A, Spizzuoco M and Serino G 2003 Experimental analysis ofmagnetorheological dampers for structural control Smart Mater. Struct.12 703-11
[4] Carlson J D and Jolly M R 2000 MR fluid, foam and elastomer devicesMechatronics 10 555-69
[5] Yalcintas M and Dai H 2004 Vibration suppression capabilities ofmagnetorheological materials based adaptive structures Smart Mater.Struct. 13 1-11
13
[6] Hu Y, Wang Y L, Gong X L, Gong X Q, Zhang X Z, Jiang W Q, ZhangP Q and Chen Z Y 2005 New magnetorheological elastomers based onpolyurethane/Si-rubber hybrid, Polym. Test. 24 (3) 324-329
[7] Demchuk S A and Kuz’min V A 2002 Viscoelastic properties of magne-torheological elastomers in the regime of dynamic deformation J. Intel.Mat. Syst. Str. 75 (2) 396-0
[8] Davis L C 1999 Model of magnetorheological elastomers J. Appl. Phys.85 3348-51
[9] Brigadnov I A and Dorfmann A 2003 Mathematical modeling ofmagneto-sensitive elastomers Int. J. Solids Struct. 40 4659-74
[10] Dorfmann A and Ogden R W 2003 Magnetoelastic modelling of elas-tomers Eur. J. Mech. A-Solid. 22 497-07
[11] Dorfmann A and Ogden R W 2004 Nonlinear magnetoelastic deforma-tions Q. J. Mech. Appl. Math. 57 (4) 599-22
[12] Kankanala S V and Tryantafyllidis N 2004 On finitely strained magne-torheological elastomers J. Mech. Phys. Solids. 52 2869-8
[13] Shen Y, Golnaraghi M F and Heppler G R 2004 Experimental researchand modeling of magnetorheological elastomers J. Intel. Mat. Syst. Str.15 (1) 27-35
[14] Kari L, Lokander M and Stenberg B 2002 Structure-borne sound prop-erties of isotropic magneto-rheological elastomers Kaut Gummi Kunstst.12 669-73
[15] Fletcher W P and Gent A N 1953 Non-linearity in the dynamic proper-ties of vulcanised rubber compounds Trans. Instn. Rubber Industr. 29266-80
[16] Lokander M and Stenberg B 2003 Improving the magnetorheologicaleffect in isotropic magnetorheological rubber materials Polym. Test. 22(6) 677-80
[17] Bellan C and Bossis G 2002 Field dependence of viscoelastic propertiesof MR elastomers Int. J. Mod. Phys. B. 16 (17-18) 2447-53
14

[18] Bossis G, Coquelle E and Kuzhir P 2004 Adaptive magnetorheologicalmaterials Ann. Chim-Sci. Mat. 29 (6) 43-54
15





























