Embed Size (px)
Citation preview

Calhoun: The NPS Institutional Archive
Theses and Dissertations Thesis Collection
2000
Exploiting consecutive ones structure in the set
partitioning problem.
Ayik, Mehmet
Monterey, California. Naval Postgraduate School
http://handle.dtic.mil/100.2/ADA344513

NAVAL POSTGRADUATE SCHOOL Monterey, California
DISSERTATION
EXPLOITING CONSECUTIVE ONES STRUCTURE IN THE SET PARTITIONING PROBLEM
by
MehmetAyik
December 2000
Dissertation Supervisor: Gerald G. Brown
Approved for public release; distribution is unlimited

REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188
Public reporting burden for this collection of information is estimated to average 1 hour per response, including the
time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and
completing and reviewing the collection of information. Send comments regarding this burden estimate or any
other aspect of this collection of information, including suggestions for reducing this burden, to Washington
headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite
1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project
(0704-0188) Washington DC 20503.
1. AGENCY USE ONLY 12. REPORT DATE I 3. REPORT TYPE AND DATES COVERED December 2000 Dissertation
4. TITLE AND SUBTITLE: 5. FUNDING NUMBERS
Exploiting Consecutive Ones Structure in the Set Partitioning Problem
6. AUTHOR(S) Mehmet Ayik
7. PERFORMING ORGANIZATION NAME AND ADDRESS 8. PERFORMING
Naval Postgraduate School ORGANIZATION REPORT
Monterey, CA 93943-5000 NUMBER
9. SPONSORING I MONITORING AGENCY NAME(S) AND ADDRESS(ES) 10. SPONSORING I MONITORING
NIA AGENCY REPORT NUMBER
11. SUPPLEMENTARY NOTES The views expressed in this thesis are those of the author and do not reflect the official
policy or position of the Department of Defense or the U.S. Government.
12a. DISTRIBUTION I AVAILABILITY STATEMENT 12b. DISTRIBUTION CODE
Approved for public release, distribution is unlimited.
13. ABSTRACT The Set Partitioning Problem (SPP) is one of the most extensively researched models in integer optimization, and is widely
applied in operations research. SPP is used for crew scheduling, vehicle routing, stock cutting, production scheduling, and
many other combinatorial problems. The power and generality of SPP come at a price: An SPP can be very difficult to solve.
A real-world SPP often has columns, or rows, with long strings of consecutive ones. We exploit this with a new preprocessing
reduction that can eliminate some variables. We also introduce a column-splitting technique to render a model that can be
solved directly or used to bound SPP with Lagrangian relaxation or an exterior penalty method. We develop an SPP row-
splitting method that yields a special model that Bender's decomposition may then solve faster than the monolithic SPP. We
demonstrate these techniques with well-known test problems from airlines and other researchers. We also contribute a new
U.S. Navy aircraft carrier long-term deployment scheduling model, using our new techniques to plan with weekly fidelity over
a ten-year planning horizon. This improved time fidelity increases planned deployment coverage of areas of responsibility by
about ten carrier weeks.
14. SUBJECT TERMS Set Partitioning, Consecutive Ones, Preprocessing, Problem Size 15. NUMBER OF
Reduction, Set Packing, Lagrangian Relaxation, Subgradient Optimization, Penalty Method, Benders PAGES l?B Decomposition, Aircraft Carrier, Optimization
17. SECURITY 18. SECURITY CLASSIFICATION OF CLASSIFICATION OF THIS
REPORT PAGE Unclassified Unclassified
NSN 7540-01-280-5500
16. PRICE CODE
19. SECURITY 20. LIMITATION CLASSIFICATION OF OF ABSTRACT ABSTRACT
Unclassified UL
Standard Form 298 (Rev. 2-89) Prescribed by ANSI Std. 239-18

THIS PAGE INTENTIONALLY LEFT BLANK
11

Approved for public release; distribution is unlimited
EXPLOITING CONSECUTIVE ONES STRUCTURE IN THE SET PARTITIONING PROBLEM
Author:
Approved by:
Approved by:
Approved by:
MehmetAyik Lieutenant, Turkish Navy
B.S., Turkish Naval Academy, 1992 M.S., Naval Postgraduate School, 1998
Submitted in partial fulfillment of the requirements for the degree of
DOCTOR OF PHILOSOPHY IN OPERATIONS RESEARCH
from the
NAVAL POSTGRADUATE SCHOOL December 2000
u.t .,."""' P. Hughes Senior Lecturer of I I - ---- I I ~ . - • I ~
Richard E. Rosenthal Professor of Operations Research
Anthony P. rhlrvm:el.lli
Professor of Mathematics
Professor of Operations Research
lll

THIS PAGE INTENTIONALLY LEFT BLANK
IV

ABSTRACT
The Set Partitioning Problem (SPP) is one of the most extensively researched models in
integer optimization, and is widely applied in operations research. SPP is used for crew
scheduling, vehicle routing, stock cutting, production scheduling, and many other
combinatorial problems. The power and generality of SPP come at a price: An SPP can
be very difficult to solve. A real-world SPP often has columns, or rows, with long strings
of consecutive ones. We exploit this with a new preprocessing reduction that can
eliminate some variables. We also introduce a column-splitting technique to render a
model that can be solved directly or used to bound SPP with Lagrangian relaxation or an
exterior penalty method. We develop an SPP row-splitting method that yields a special
model that Bender's decomposition may then solve faster than the monolithic SPP. We
demonstrate these techniques with well-known test problems from airlines and other
researchers. We also contribute a new U.S. Navy aircraft carrier long-term deployment
scheduling model, using our new techniques to plan with weekly fidelity over a ten-year
planning horizon. This improved time fidelity increases planned deployment coverage of
areas of responsibility by about ten carrier weeks.
v

THIS PAGE INTENTIONALLY LEFT BLANK
VI

TABLE OF CONTENTS
I. INTRODUCTION .................................................................................................. 1 A. BACKGROUND AND MOTIV ATION ................................................... 1
1. Set Partitioning Problem (SPP) .................................................... 3 a. Applications Of SPP ........................................................... 3 b. Solution Algorithms For SPP ............................................. 4 c. Problem Size Reduction ...................................................... 5 d. Use Of Special Structures ................................................... 6
2. Set Packing (SP) And Set Covering (SC) ..................................... 8 3. A Long-Term Aircraft Carrier Deployment Problem
Incorporating Set Partitioning, Set Packing, And Set Covering Constraints ..................................................................... 9
B. OUTLINE OF THE DISSERTATION .................................................. 13
II. PRELIMINARIES ............................................................................................... 15 A. COLUMN SPLITTING TECHNIQUE ................................................. 15 B. TOTAL UNIMODULARITY ................................................................. 23 C. LAGRANGIAN RELAXATION ............................................................ 24
III. SPP LOWER BOUND ALGORITHMS IMPLEMENTED WITH THE COLUMN SPLITTING REFORMULATION ................................................. 27 A. LAGRANGIAN RELAXATION AND SUBGRADIENT
OPTIMIZATION ..................................................................................... 27 B. EXTERIOR PENALTY METHOD ....................................................... 31 C. ROW REORDERING ............................................................................. 33 D. COMPUTATIONAL RESULTS FOR THE SPP LOWER BOUND
ALGORITHMS IMPLEMENTED WITH THE COLUMN SPLITTING REFORMULATION ........................................................ 36
IV. INTEGRATING A ROW SPLIT TECHNIQUE WITH BENDERS DECOMPOSITION ............................................................................... · .............. 45 A. ROW SPLITTING TECHNIQUE ........................................................ .45 B. IMPLEMENTING BENDERS DECOMPOSITION ON THE ROW
SPLIT REFORMULATION ................................................................... 51 C. GENERATING IMPROVED FEASIBLE SOLUTIONS FOR SP
AND SC PROBLEMS ............... , ............................................................. 56 1. SP Problem .......................................... ,. ....................................... 56 2. SC Problem ................................................................................... 57
D. COMPUTATIONAL RESULTS FOR THE NEW ROW SPLIT BENDERS DECOMPOSITION (RSBD) ALGORITHM .................... 59
Vll

V. REDUCTIONS IN SPP ....................................................................................... 71 A. KNOWN REDUCTION OPERATIONS ............................................... 71
1. Duplicate Columns ....................................................................... 72 2. A Column Is Equal To The Sum Of Other Columns ............... 73 3. Dominated Rows .......................................................................... 73 4. Two Rows Differ By Two Entries ............................................... 73 5. Singleton Row ............................................................................... 74 6. Clique Reduction .......................................................................... 74
B. CORRESPONDENCE OF SPP REDUCTIONS IN REFORMULATIONS ............................................................................. 78 1. Singleton Transshipment Row .................................................... 82 2. A Transshipment Row Has All+ 1 Or All-1 Entries ............... 84 3. A Transshipment Row Has Exactly One + 1 And One -
1 Entry ........................................................................................... 84 4. A Transshipment Row In (NS) Is Dominated By A Row In
(SPP) ••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••.••••••••••••••••••• 85 5. Clique Dominance ....................................•................................... 87
C. USE OF HIDDEN NETWORK STRUCTURE .................................... 91 D. A NEW SPP REDUCTION METHOD: COLUMN SPLIT
REDUCTION ........................................................................................... 93 1. Generating Valid Equalities That Yield More New Clique
Reductions for SPP ...................................................................... 93 2. Computational Results For The Column Split Reduction ......• 98
E. EXTRACTING HIDDEN ARCS OF THE INTERSECTION GRAPH BY PROBING ......................................................................... 100
VI. A NEW FORMULATION FOR A LONG-TERM AIRCRAFT CARRIER DEPLOYMENT SCHEDULING PROBLEM ................................................ 103 A. BACKGROUND .................................................................................... 1 03 B. AIRCRAFT CARRIER DEPLOYMENT SCHEDULING
FACTORS AND OPERATIONS CONSTRAINTS ........................... 107 1. Depot Level Maintenance .......................................................... 107
a. Dry docking Capacity And Availability .......................... 112 b. Repair Man-day Availability ...•...•..•.••..•............•.••.......... 112 c. Refueling Availability ........•..•••.....•..........•...............•..•... 113
2. Work-Up Cycle ........................................................................... 113 3. Personnel Tempo Of Operations .............................................. 114 4. Transit Time ............................................................................... 115 5. Availability OfLANTFLT Carriers For CENTCOM ........... 115
C. SCHEDULE PERIODS ......................................................................... 115 1. Shifting Maintenance Periods ................................................... 118 2. Possible Deployment Schedules In A Deployable Period ....... 120
a. ForPACFLTCarriers .......•.•....•..................................... 120 b. For LANTFLT Carriers ................................................. 121
viii

D. TWO-COMMODITY NETWORK FLOW PROBLEM WITH SIDE CONSTRAINTS .......................................................................... 122 1. Optimization Model Generation ............................................... 122 2. Model Formulation .................................................................... 127
E. NEW FORMULATION: DECOUPLING DEPLOYABLE PERIODS ................................................................................................ 132
F. COMPARISON OF FORMULATIONS ............................................. 136
VII. CONCLUSIONS, CONTRIBUTIONS, AND RECOMMENDED FUTURE RESEARCH ....................................................................................................... 139 A. CONTRIBUTIONS ............................................................................... 142
1. Column Splitting ........................................................................ 142 2. Row Split Benders Decomposition ........................................... 144 3. Reductions In SPP ...................................................................... 145 4. A New Formulation For A Long-Term Aircraft Carrier
Scheduling Problem ................................................................... 146 B. RECOMMENDATIONS FOR FUTURE RESEARCH ..................... 146
1. Augmented Lagrangian Penalty Method ................................. 146 2. Further Investigation Of The Column Split Reduction ......... 147 3. A Variant Of The Simplex Method .......................................... 147 4. Fictitious Play ............................................................................. 148
LIST OF REFERENCES .............................................................................................. 149
INITIAL DISTRIBUTION LIST ................................................................................. 157
lX

TillS PAGE INTENTIONALLY LEFT BLANK
X

ACKNOWLEDGMENTS
I am indebted to the Republic of Turkey and the Turkish Navy for giving me the
opportunity to pursue a Ph.D. degree.
I am especially thankful to my dissertation supervisor, Professor Gerald G.
Brown. Throughout my education at the Naval Postgraduate School, he was a consistent
wellspring of sound advice, technical competence, professional assistance, and moral
support. Without his assistance, this dissertation could not have been completed.
I am thankful to Associate Professor Robert F. Dell, Senior Lecturer Wayne P.
Hughes, Professor Guillermo Owen, Professor Richard E. Rosenthal, and Professor R.
Kevin Wood for their contributions, continuous guidance, patience, and support in
carrying out this dissertation.
I wish to thank my mother, Selma Demirtas, Mrs. Betty A. Wetters, and Mr.
Ronald C. Wetters for their encouragement and support throughout my studies at the
Naval Postgraduate School.
Finally, I wish to express my sincerest appreciation to Kara A. W etters for her
contributions, indefatigable support and encouragement throughout my studies at the
Naval Postgraduate School. Without her unwavering devotion and selfless support, this
journey would have been far more arduous. This dissertation is dedicated to her.
Xl

THIS PAGE INTENTIONALLY LEFT BLANK
Xll

I. INTRODUCTION
A. BACKGROUND AND MOTIVATION
Among all special structures in pure integer programming, three have the most
widespread applications: set partitioning, set covering, and set packing. Using set
notation, these problems can be expressed as follows.
Le~ M = {l, ... ,m} and N = {l, ... n}. Let Mj be a subset of M with an associated
weight of cp for all j EN. A subsetS of N is a cover of M if U jesMj =M. Sis a
packing of M if M j n M k is empty for all j' k E s' j * k . sis a partition of M if it is both
a cover and a packing of M. The weight of a subsetS of N is defined as L cj . Figure I.l jeS
illustrates a cover, a partition, and a packing of a set with six objects.
• ~ ~ • ~
~ •
rcJ
C) • ~ ~ • • (a} (b) (c)
Figure I.l. A Cover, a Partition, and a Packing. Figure I.l.( a) is a cover, (b) is a partition, and (c) is a packing of a set with six objects, say M. The collection of objects covered by each oval border forms a subset of M. In Figure (a), each object in M is covered at least once. The third and fifth ejects are covered twice. In (b), each object is covered exactly once. In (c), the third and sixth objects are not covered and the two subsets are disjoint.
1

In the set covering problem, the objective is finding a cover S of M with the
minimum weight, whereas in the set packing problem, the objective is finding a packing S
with the maximum weight. For the set partitioning problem both minimization and
maximization versions are possible.
To formulate these problems as integer programming problems, we introduce the
m x n incidence matrix A of the family {Mj I j EN}, whose entries are given by aif = 1 if
i EM P and a if = 0 otherwise. We also define a decision variable xp j = 1, ... , n, that is
equal to 1 if j E S, and 0 otherwise. Let x = ( xP ... , xn). Then S is a cover, pack, or
partition if and only if, respectively:
Ax :2:: e,Ax ~ e,orAx = e,
where e is a column vector of size m consisting of all ones. In a more general case in
which e has all its entries equal to a scalar k, S is named k-cover, k-pack, or k-partition,
respectively.
The set partitioning, set packing, and set covering problems are proven to be NP
Complete ([Lenstra and Rinnooy Kan 1979], [Garey and Johnson 1979]).
In the following subsections, we provide motivation for the set partitioning, set
packing and set covering problems with special emphasis on a variety of subordinate
topics including: problem formulations, applications, algorithms, and the inter
relationships between these problems.
2

1. Set Partitioning Problem (SPP)
The integer programming formulation of SPP is:
minimize c'x
(SPP) s.t. Ax=e
x binary
(I. I. a)
(I.l.b)
(l.l.c)
where cis a column vector of size nand c' denotes its transpose. Using standard notation
(e.g., [Bertsimas and Tsitsiklis 1997]), column} of matrix A is denoted as Aj, and row i
of A is denoted as a/ . In Equation (1.1.b ), Ax is referred to as the left-hand side of the
equality, and e as the right-hand side. All vectors are assumed to be column vectors.
a. Applications Of SPP
A wide variety of practical applications have been modeled as SPPs. A
partial list of applications described in the literature includes: crew scheduling ([Charnes
and Miller 1956], [Marsten and Shepardson 1980], [Hoffman and Padberg 1993]), vehicle
routing ([Brown et al. 1987a]), stock cutting ([Pierce 1970]), political districting
([Garfinkel and Nemhauser 1970]), and circuit partitioning ([Eben-Chaime et al. 1996]).
References to further applications can be found in [Garfinkel and Nemhauser 1972,
Chapter 8], [Balas and Padberg 1976], and [El-Darzi and Mitra 1990].
Well-known military applications of SPP include a variety of ship
scheduling problems. Wing [1986] schedules surface combatants for inspections,
training, and other events. Brown et al. [1990] schedule U.S. Atlantic Fleet combatants
to deployments and naval exercises. Ayik [1998] presents a set partitioning model, also
3

involving set packing and set covering constraints, to schedule the U.S. aircraft carriers
for deployment and maintenance.
The best-known application of SPP is airline crew scheduling. The costs
associated with assigning personnel to flights are the second highest operating
expenditure in the airline industry [Hoffman and Padberg 1993], hence the financial
significance of crew scheduling.
b. Solution Algorithms For SPP
Linear programming (LP) based branch and bound (B&B) (e.g., Bertsimas
and Tsitsiklis 1997]) is the most common approach used to solve an integer programming
problem. B&B is used as an infrastructure in most of the efficient SPP algorithms.
The most frequently published approaches for solving SPP other than by
outright B&B are implicit enumeration and cutting plane methods. Balas and Padberg
[1976] provide a survey of these and other approaches. Implicit enumeration takes
advantage of the special structure of SPP. Systematic search of the solution space
generates partial solutions (assigning zero-one values to variables taken one at a time) and
explores the logical implications of these value assignments.
Hoffman and Padberg [1993] present a branch-and-cutt approach to solve
large scale SPPs. A branch-and-cut solver generates cutting planes based on the
underlying structure of the polytope t defined by the convex hullt of the feasible integer
tThis terminology is defmed in basic texts such as Bertsimas and Tsitsiklis [1997], and Nemhauser and
Wolsey [1988].
4

points, and incorporates these cuts into a B&B tree-search that uses automatic
reformulation procedures, heuristics and LP technology to assist in the solution. There
are four components to a branch-and-cut optimizer: a preprocessor that tightens the user
supplied formulation; a heuristic that yields good integer feasible solutions quickly; a cut
generation procedure (the engine of this overall approach that tightens the LP relaxation),
and a branching strategy that selects the next branching variable and determines the
search-tree. Hoffinan and Padberg claim to be very efficient at solving SPPs.
c. Problem Size Reduction
Problem size reduction techniques are implemented on SPP to reduce the
number of variables and/or constraints through logical implications without eliminating
optimal solutions to the original problem. Problem size reduction, also called presolve or
prereduce, is an effective and inexpensive tool used by all efficient SPP algorithms today.
Hoffinan and Padberg's branch-and-cut optimizer uses size reduction
before at each node of the branch-tree that is associated with a non-trivial problem
restriction, say fixing a binary variable to one. The idea is to propagate and amplify the
effects of variable fixing based on reduced costs and branching decisions. They report
that these techniques are highly effective in reducing the solution times of the LP
subproblems within branch-and-cut.
Problem reductions are typically based on recognition of duplicate
columns, redundant rows, and conflicting variables ([Balas and Padberg 1976], and
[Hoffinan and Padberg 1993]). Ali et al. [1995] present variable reductions based on
hidden network structure in SPP.
5

Problem reductions are discussed in Chapter V.
d. Use Of Special Structures
The identification of special structures within the incidence matrix, A, can
play a central role in the solution procedures for SPP. In LP-based B&B of SPP, special
structures are used to aid in fathoming and branching. For instance, to aid in branching,
Marsten [1974] uses a reordering of the columns and rows, and Avis [1980] identifies
dominance relations in the incidence matrix, A.
Special structures, either inherent or enforced (artificially extracted), are
also used in SPP solution techniques. Embedded structure in the incidence matrix, such
as generalized upper bounds, network rows, and generalized networks can be recognized
with very little effort (e.g., [Brown and Thomen 1980], [Brown and Wright 1984],
[Brown et al. 1985]). Nemhauser and Weber [1979] enforce a bipartite matching to solve
the large-scale LP relaxations of SPPs (with an associated increase in the number of
variables and constraints).
Marsten and Shepardson [1980] present column splitting to reveal the
network structure of the two-duty period scheduling problem. (This technique is
described in Chapter II.) The two-duty scheduling problem, arising naturally in personnel
scheduling, is formulated as an SPP. The formulation of the problem is described as
follows.
Suppose there are a number of duty stations, each of which has minimum
staffing requirements at every period of the working day. The rows of the incidence
matrix, A, correspond to the hours of operation of each station. Note that the rows are in
6

natural order, arranged by station and ordered sequentially by time periods within each
station. Each column corresponds to a possible personnel schedule where an entry of 1 in
the matrix indicates that the column's worker is assigned to the station of that row for the
corresponding time period. With the restrictions that a worker is assigned to no more
than one station during his morning duty period and no more than one (possibly different)
station during his afternoon duty period, each column will contain at most two strings of
ones in consecutive matrix rows. The problem is to find a minimal-cost set of personnel
schedules such that each station's duty requirements will be satisfied.
In the case where each person is allowed to work exactly one duty period a
day (i.e., each column of the incidence matrix has one string of consecutive ones), the
problem is called a one-duty period scheduling problem. The one-duty period scheduling
problem can be transformed to a minimum cost network flow model, and thus be solved
in polynomial time (e.g., [Veinott and Wagner 1962], [Garfinkel and Nemhauser 1972]).
That is, the time needed to solve the problem is a polynomial function of the length of the
input data.
Circular ones in all columns permits SPP to be solved parametrically as a
bounded series ofnetwork flow problems (e.g., [Bartholdi et al. 1980]). A 0-1 column is
.said to be circular if its ones occur consecutively, where the last and first entries are also
considered to be consecutive.
Ali and Thiagarajan [1989], and Ali et al. [1995] use hidden network
structures in SPP to transform the problem to a network with side constraints and side
columns, respectively.
7

2. Set Packing (SP) And Set Covering (SC)
The integer programming formulations of SP and SC problems are given by (SP)
and (SC), respectively:
maximize c'x
(SP) s.t. Ax=:::;; e
x binary
minimize c'x
(SC) s.t. Ax~ e
x binary
(I.2.a)
(I.2.b)
(I.2.c)
(I.3.a)
(I.3.b)
(I.3.c)
SP and SC problems are close relatives of SPP. An SPP can be formulated as an
SP or SC problem (e.g., [Balas and Padberg 1976]). Conversely, an SP problem can be
formulated as an SPP. However, we cannot formulate an SC problem as an equivalent
SPP.
The equivalence relationships between SP, SC, and SPP show that the
applications referenced in the previous section for SPP can also be listed for SP or SC
problems. For a partial list of SC problem specific applications, the reader is referred to
[Beasley 1987], [Fisher and Kedia 1990], and [Grossman and Wool1997].
There is abundant literature on the SC problem, dealing with: exact algorithms
(e.g., [Beasley 1992], and [Fisher and Kedia 1990]), heuristics (e.g., [Beasley and Chu
1996], [Haddadi 1997], and [Caprara et al. 1999]), and surveys ([Garfinkel and
Nernhauser 1972] and [Christofides and Korman 1975]).
8

Caprara et al. [1999] present a Lagrangian-based heuristic for the SC problem that
we adapt for SPP. The algorithm is designed to solve large-scale SC problem instances
with up to 5,500 rows and 1,100,000 columns, arising from crew scheduling for an Italian
railway. The primary characteristics of the algorithm include: (1) a dynamic pricing
scheme for the variables, similar to that used for solving large-scale linear programs,
coupled with subgradient optimization and greedy heuristics, and (2) the systematic use
of column fixing to obtain improved solutions. Additionally, Caprara et al. present
several improvements on the standard way of defining the step-size and the ascent
direction within the subgradient optimization procedure. (For comprehensive information
on the Lagrangian relaxation problem and the subgradient optimization method see
[Parker and Rardin 1988]). Caprara et al. report this algorithm to be more efficient than
existing heuristics.
3. A Long-Term Aircraft Carrier Deployment Problem Incorporating Set Partitioning, Set Packing, And Set Covering Constraints
A United States (U.S.) Navy aircraft carrier scheduling problem can be formulated
using a classical set partitioning model that also involves set covering and set packing
constraints ([Ayik 1998]). Many researchers have formulated the scheduling of
transportation vehicles (e.g., delivery trucks, buses, oil tankers and ships) as an SC or
SPP. Appelgren [1969, 1971] and Crawford and Sinclair [1977] suggest SC or SPP to
respectively schedule ships and tankers. Brown et al. [1987a] schedule crude oil super
tankers using a set partitioning formulation. Military applications of this approach
9

include the scheduling of the U.S. Navy combatants to deployments and naval exercises
(e.g., [Wing 1986], [Brown et al. 1990]).
The classical set partitioning approach first generates all possible schedules that
provide the period-by-period status of each carrier for the planning horizon while
satisfying operations and maintenance constraints. Next, an SPP is formulated to
maximize coverage (or minimizing uncovered periods) in areas of responsibility (AORs)
subject to the constraints that
(i) exactly one alternate schedule is chosen for each carrier, and
(ii) each AOR should be covered in each period.
The algebraic formulation of the set partitioning model is as follows:
Indices:
c
a
t
j E J(c)
carriers
Areas of Responsibility (AORs)
periods (in weeks)
set of possible schedules for each carrier c ( i.e. schedules that satisfy
the operations and maintenance constraints, and provide the period-by
period status of this carrier for the planning horizon)
10

Data:
A:!i equals 1 if schedule j of carrier c covers AOR a in period t, 0 othef\Vise
WEIGHT a weight of coverage in AOR a
MAXGAP maximum allowable number of consecutive uncovered periods in an
AOR
Decision Variables
x 1
equals 1 if schedule j is selected, 0 othef\Vise
uncovered1a equals 1 if AOR a is not covered in period t, 0 othef\Vise
Formulation
minimize L WEIGHTauncovered; (I.4.a) a,j
s.t. L x1 =1 v c (I.4.b) jeJ(c)
L A:!ixJ + uncovered1a ~ 1 V a, t (I.4.c) c,j
t+(MAXGAP-1)
L uncovered1~ 5:(MAXGAP -1) V a, t (I.4.d) t'=t
V jeJ(c), c (I.4.e)
uncovered; ~ 0 V a, t (I.4.f)
11

In the above formulation, the objective is to minimize the uncovered periods in all
AORs. Partition constraints (I.4.b) ensure that exactly one schedule is selected for each
earner. Constraints (I.4.c) express the intent that each AOR should be covered in each
period. Because covering all AORs is not possible with the current carrier force, this
constraint has an elastic variable for each uncovered period. Packing constraints (I.4.d)
ensure that uncovered periods for each AOR are no more than the maximum allowable
number of gap periods (MAX GAP).
Table 1.1 shows the size of this SPP for twelve aircraft carriers, fixed maintenance
periods, weekly time increments, and a planning horizon of ten years. The number of
columns increases to several million if the maintenance periods are scheduled
synchronously with the deployment periods.
Number of Constraints Number of Variables
Partitioning Covering Packing X uncovered
14 1,046 1,046 222,293 1,046
Table 1.1. Model Size for the Set Partitioning Formulation of the U.S. Navy Aircraft
Carrier Deployment Scheduling Problem with Twelve Aircraft Carriers, and Fixed
Maintenance Periods, Weekly Time Periods, and a Ten-Year Planning Horizon.
Set partitioning is attractive in ship scheduling because it is relatively easy to
generate, modify, and control. Although set partitioning has many advantages, it has not
been the preferred method for solving the carrier scheduling problem because the long
planning horizon yields an impractically large number of alternate schedules.
12

B. OUTLINE OF THE DISSERTATION
A real-world SPP often has columns, or rows, with long strings of consecutive
ones. This dissertation seeks methods to bound, or solve an SPP by exploiting the
consecutive ones structure in the incidence matrix, A.
Chapter II presents some of the preliminaries that are applied throughout this
dissertation, including:
(i) a column splitting reformulation ofSPP,
(ii) total unimodularity, and
(iii) Lagrangian relaxation.
Chapter III presents methods to solve the column split SPP reformulated problem.
We focus on finding a good lower bound that can be incorporated in branch-and-cut
[Hoffman and Padberg 1993] to solve the original SPP.
In Chapter IV, we present a new algorithm to solve binary programming problems
(e.g., SP, SC, or SPP) whose rows contain strings, or segments, of consecutive ones. This
algorithm can also solve general binary programming problems. However, the runtime of
the algorithm degrades as the number of ones segments in the problem increases.
Chapter V discusses problem size reduction in SPP. We first present the known
reduction techniques. Then, we show other reductions suggested by the network
constraints obtained by the reformulation of SPP using column splitting.
Chapter VI presents a new integer programming formulation for the aircraft
carrier scheduling problem. We first describe the scheduling factors and operations
constraints. Next, we present the previously suggested model, a two-commodity network
13

flow problem with side constraints. Then, we introduce the new formulation and compare
it with the previous models.
Finally, Chapter VII concludes this dissertation by summarizing the primary
findings, and offering suggestions for future research.
14

II. PRELIMINARIES
A column split reformulation of SPP proceeds as follows. Consider each existing
column in the SPP coefficient matrix A. IdentifY each segment of rows with consecutive
ones in this column, and define a corresponding new binary column in the split
reformulation with these same consecutive ones. Also add coupling constraints to the
reformulation that all the new split binary columns associated with each original SPP
column must share the same value. This column split reformulation exhibits purely
consecutive ones columns in the rows it inherits from the seminal SPP, and thus is totally
unimodular in these original rows. In addition, the new coupling constraint rows are
trivially constructed with total unimodulatity. However, although the original rows are
now unimodular, and the new rows are constructed to be unimodular, the union of these
two individually unimodular sets of rows is not unimodular. But, by moving the coupling
constraints to the objective function and implementing a well-known Lagrangian
relaxation procedure, we leave ourselves with the unimodular restatement of the original
constraints and can obtain lower bounds for SPP.
This chapter demonstrates the column splitting reformulation of SPP, reviews
total unimodularity, and Lagrangian relaxation to help us construct the methods presented
in the following chapters.
A. COLUMN SPLITTING TECHNIQUE
Marsten and Shepardson [1980] first introduce column (variable) splitting
( decoupling) to solve the two-duty period scheduling problem. Marsten and Shepardson
15

use this technique to reformulate the two-duty period scheduling problem as a network
flow problem with side constraints.
(SPP)
Consider the following SPP:
n
minimize L c jx j j=!
s.t. n
L:aiixj = 1 j=!
xj binary
(ll.l.a)
i=1, ... ,m (ll.l.b)
j = 1, ... ,n (ll.l.c)
where cj represents the cost of variable xj for all j = l, ... ,n, and the scalar aii E {0, 1} for
all i = 1, ... ,m and j = 1, ... ,n.
In (SPP), for each column vector Aj we define a segment of ones as a consecutive
segments of ones for column j containing the information where each segment starts and
ends in terms of pairs of ordered row indices (e.g., Kj = {(lj,lj + p), ......... } ). IKjl
denotes the number of segments in column j . Let r be the set of columns that have
more than one segment of ones (i.e., r = { j: IKj I > 1} ). Let AJ be a column vector of
size m , such that a~ = 1 if the i th element of column j is in the k th segment of Kj in
(SPP), and a~ = 0 otherwise. Note that the sum of A J for all segments in Kj is equal to
16

IKJI the vector Aj (i.e., L AJ = Aj ). Column A J is given a cost coefficient of dJ = cjaJ
k=l
IK;I where IaJ = 1, and is associated with the variable yJ E { 0,1}. The yJ are required to
k=l
satisfy yJ = yJ+' for all k = 1, ... ,1Kj1-1 and j E r. Thus, we obtain a problem
equivalent to (SPP) given by:
(SPP')
n IKil minimize LLdJyJ
j=l k=l
s.t.
k b" yj mary
Vi
V j andk
Using matrix notation, this problem can be written as:
minimize dy
(SPP') s.t. Ty=e
Sy=O
y binary
(ll.2.a)
(ll.2.b)
(ll.2.c)
(II.2.d)
(ll.3.a)
(ll.3.b)
(II.3.c)
(ll.3.d)
where T and S are the coefficient matrices associated with equations (II.2.b) and (ll.2.c ),
respectively. By construction, S has the node-arc incidence matrix structure of a network
(i.e., each column of S has either a + 1 and a -1, only a + 1, only a -1, or all zeros), and T
has exactly one segment of ones in each column.
17

Example II.l illustrates the reformulation described thus far.
Example 11.1: Consider the following SPP where m = n = 6 .
minimize c'x
(SPP) s.t. Ax=e
x binary
c= [ 4 2 6 8 3 4 ]
AI Az A3 A4 As A6 1 0 1 0 1 0
1 0 0 1 0 1
A= 1 1 1 0 0 1
0 0 1 0 1 0
0 1 1 0 0 0
1 1 0 1 1 1
We split the columns of A to obtain one segment of ones in each column. Tis the
resulting matrix.
AI Az AI Az AI Az AI A2 AI A2 A3 AI A2 I I 2 2 3 3 4 4 5 5 5 6 6
1 0 0 0 1 0 0 0 1 0 0 0 0
1 0 0 0 0 0 1 0 0 0 0 1 0
T= 1 0 1 0 0 1 0 0 0 0 0 1 0
0 0 0 0 0 1 0 0 0 1 0 0 0
0 0 0 1 0 1 0 0 0 0 0 0 0
0 1 0 1 0 0 0 1 0 0 1 0 1
Distributing the cost equally among the progeny of each split column, we obtain the
following cost coefficient vector d :
AI Az AI A2 AI A2 AI A2 AI Az A3 AI Az 1 1 2 2 3 3 4 4 5 5 5 6 6
d= [2 2 1 1 3 3 4 4 1 1 1 2 2]
18

Thus, the equivalent reformulation is as follows:
2y: +2y12 I 231324142 I o 3 2 I 2 2 mm + Yz + Yz + Y3 + Y3 + Y4 + Y4 + Ys + Y5 + Ys + Y6 + Y6
s.t. I YJ
I +y3 I +ys 1
y: +y! I
+y6 1 I
YJ +y; +y; I +y6 1
2 +y3 +y~ 1
+y~ + y; 1 2 2 2 3 2 + Y1 + Y2 + Y4 + Ys + Y6 1 -----------------------------------------------------------------------------------------------------------------
I 2 Q Y1 -y~ =
I 2 + Ys -ys
+ y~ -y;
0
0
0
0
0
+ Y! -y~ 0 I 2 I 2 I 2 I 2 I 2 3 I 2 { 0 I}
Y1, Y1 , Yz, Yz , Y3' Y3 ' Y4, Y4 , Ys' Ys , Ys' Y6, Y6 E '
End of Example 11.1
Matrix T of formulation (SPP') has exactly one segment of consecutive ones in
each column. A matrix having this structure is called an interval matrix (e.g.,
[Nemhauser and Wolsey 1988]). T can be transformed to a node-arc incidence matrix of
a network (e.g., [Veinott and Wagner 1962]). To accomplish this transformation, we first
append a redundant (m+ls1) constraint Ox= 0 to the end of equation set (II.3.b). We
next perform an elementary row operation for each i = m + 1, m, ... , 1 , subtracting the i th
constraint in (II.3. b) from the ( i + r 1) constraint. These operations create the formulation
below:
19

minimize d 'y
(NS) s.t. :Ny = b
Sy=O
y binary
(II.4.a)
(ll.4.b)
(II.4.c)
(II.4.d)
:N is the resulting network matrix consisting of exactly one + 1, and one -1 in each
column. The number of rows of :N is (m + 1) . Column vector b has + 1 as its first entry,
is followed by zeroes, and has -1 as the last ( m +1st) entry.
If we consider constraints Sy = 0 as side constraints, then ( NS) can be defined as
a constrained shortest path problem. Each row of constraints :Ny'= b corresponds to a
node in the network. Every variable yJ is represented by an arc directed from a node in
which yJ has a + 1 coefficient, to a node with a -1 coefficient. Hence, the network
corresponding to ( NS) is called a directed network.
Cost coefficient dj of variable yJ is assigned as the length of the arc
corresponding to yJ . One unit of flow is sent from the first node ( i = 1 ) to the last node
( i = m + 1 ). By construction, every arc in the network is forward (i.e., if an arc is incident
from node i1
to node i2
, then i1 < i2 ). Hence, the network corresponding to (NS) is
acyclic. Side constraints Sy = 0 ensure that if we use arc y~ in the network, then we also
use arc yJ for all k e {1, ... ,jKjj} \1.
20

Observe that the shortest path of the network corresponding to (NS) is a lower
bound on (SPP). Further, the longest path of the same network is an ·upper bound on the
objective value of (SPP).
Example ll.2 illustrates the reformulation (NS) for the set partitioning problem
presented in Example ll.1.
Example 11.2:
By appending a row of zeros to matrix T in Example II.1, and subtracting the i th row
from the (i + r 1) row, we obtain the following matrix, N.
A) A2 A) A2 A) A2 A) A2 A) A2 A3 A) A2 I I 2 2 3 3 4 4 5 5 5 6 6
1 0 0 0 1 0 0 0 1 0 0 0 0
0 0 0 0 -1 0 1 0 -1 0 0 1 0
:N= 0 0 1 0 0 1 -1 0 0 0 0 0 0
-1 0 -1 0 0 0 0 0 0 1 0 -1 0
0 0 0 1 0 0 0 0 0 -1 0 0 0
0 1 0 0 0 -1 0 1 0 0 1 0 1
0 -1 0 -1 0 0 0 -1 0 0 -1 0 -1
21

Thus, the equivalent reformulation (NS) is:
I -y2 2 +y2
2 +ys
2 -Ys
1
0
= 0
0
0
0
- y~ - y~ - y; - y: - y~ -1 ------------------------------------------------------------------------------------- ... ---------------------------
1 y2 = 0 Yl -I
+y~ -y~ = 0 I
+y3 2
-y3 0
+y! ? 0 -y;
I 2 +ys -ys 0 2 +ys -y; 0
+y~ 2 -y6 0
I 2 I 2 I 2 I 2 I 2 3 I 2 { 0,1} y]' Yl, Y2, Y2, Y3, Y3, y4, Y4, Ys, Ys, Ys, Y6, Y6 E
End of Example 11.2
Proposition ll.1 is a result of the operations shown thus far.
Proposition 11.1: yJ * is an optimal solution of (NS) if and only if xj * = y~ * is an
optimal solution to (SPP) for all j =1, ... ,n.
Different equivalent reformulations of (SPP) can also be derived using the column
splitting technique. Side constraints (ll.4.c) may be formulated as any equivalent set of
I. . h h . I h I 2 IKJI-1 IKJI F . equa 1t1es t at toget er 1mp y t at yj = yj = ...... = yj = yj . or mstance:
22

• (II.5.a)
• (II.S.b)
v j E r (II.S.c)
Note that constraints (II.S.c) do not yield as strong of an LP relaxation as the other
equivalent reformulations ofSPP.
The arguments stated in this section for the reformulation of SPP also hold for SC
and SP with minor adjustments. Moreover, any linear program can be reformulated using
the column splitting technique to obtain special structures in each split column. For
instance, Schrage [ 1997] shows that any linear program can be converted to one with no
more than three non-zero coefficients per column, and we can use column splitting to
render this into a generalized network with side constraints.
Matrices !N and S of reformulation (NS) both have the node-arc incidence
matrix structure of a network. Next, we show that the matrices with this structure are
members of a class called totally unimodular (TU) Matrices.
B. TOTAL UNIMODULARITY
First, we define TU and list some of the well-known properties of TU matrices
that are used throughout this dissertation. For comprehensive information on total
unimodularity and related theorems, see [Nemhauser and Wolsey 1988].
23

Definition 11.1: An ( m x n) integral matrix A is totally unimodular if the determinant of
each square submatrix of A is equal to 0, 1, or -1.
It is evident that aij = 0, 1, or -1 if A is TU, because every entry of the matrix is
a (1 x 1) square submatrix.
Proposition 11.3: An ( m x n) matrix A is TU if and only if the matrix (A, I m) is TU
(where Im is an (mxm) identity matrix).
Proposition 11.4: A matrix A is TU if and only if the transpose matrix A' is TU.
Next, we present a significant theorem of integer programming developed by
Hoffinan and Kruskal [1956].
Theorem 11.5: If A is TU, and if b, Q., l, and u are integral, then every basic feasible
solution defined by the constraints Q.::::;; Ax ::::;; b, l ::::;; x ::::;; u is integral.
Proposition 11.6: The node-arc incidence matrix N of a directed network is TU.
Thus, we complete our brief tour of the relevant properties of TU matrices and
observe that matrices % and S of reformulation (SPP") are TU.
C. LAGRANGIAN RELAXATION
Lagrangian relaxation dates to the eighteenth century. More recent use of this
method in discrete optimization appears in the seminal papers by Held and Karp [1970,
1971] that address the ''traveling salesman problem." Fisher [1981, 1985], Geoffrion
[1974], and Shapiro [1979] provide insightful surveys ofthe Lagrangian relaxation and its
uses in integer programming.
24

Lagrangian relaxation is often used for integer programming problems
(IP) z* =min { c'x: Ax= b, x integral}
for which the constraints Ax= b can be split into two parts, A1x = b1 and Azx = b2 such
that relaxed problems of the form min { c'x: A1x = b1, x integral} can be solved efficiently.
The Lagrangian relaxation method uses the idea of relaxing the explicit linear
constraints by bringing them into the objective function with associated Lagrange
multipliers JL . The resulting problem
minimize X
x integral
is referred to as a Lagrangian relaxation or Lagrangian subproblem of the original
problem (IP), and the function
is referred to as Lagrangian function. The solution of the Lagrangian subproblem need
not be feasible for the original problem.
The Lagrangian relaxation method is motivated by the following observation:
Theorem 11.7 (Lagrangian Bounding Principle): For any vector JL of Lagrange
multipliers, the value L(JL) of the Lagrangian function is a lower bound on the optimal
objective function value z * of the original optimization problem (IP). (e.g., Ahuja et al.
[1993, Chapter 16, pp. 605-606])
25

To obtain the highest possible lower bound, we need to solve the following
optimization problem
L* = maxf.l L(f.1)
which is referred to as the Lagrangian multiplier problem.
Most of the key results of Lagrangian relaxation (e.g., the bounding principle and
optimality conditions) are special cases of more general results in mathematical
programming duality theory. Rockafellar [1970] and Stoer and Witzgall [1970] provide
comprehensive treatments of this subject.
The preceding discussion of the Lagrangian bounding principle provides us with
valid bounds for comparing objective function values of the Lagrangian multiplier
problem and the original problem (IP) for any choices of the Lagrangian multipliers f.1 ,
and any feasible solution x of (IP):
L(f.l):;;; L*:;;; z*:;;; c'x.
Hence, the Lagrangian bounding principle has the following implication:
Corollary 11.8: If L(f.1) = c'x for some Lagrangian multiplier vector f.1, and for a
feasible solution x of (IP), then L(f.l) = L * = z* = c'x .
Furthermore, the following proposition defines more explicit bounds for the case
in which the Lagrangian subproblem yields intrinsically integer solutions.
Proposition 11.9: If the Lagrangian subproblem yields intrinsically integer solutions, then
the optimal value L * of the Lagrangian multiplier problem is equal to the optimal
objective function value ofthe LP relaxation of(IP) [Geoffrion 1974].
26

III. SPP LOWER BOUND ALGORITHMS IMPLEMENTED WITH THE COLUMN SPLITTING REFORMULATION
This chapter presents two algorithms to solve the column splitting reformulation
problem (NS):
(i) a Lagrangian relaxation method using subgradient optimization, and
(ii) an exterior penalty method.
W ~ seek a good lower bound that can be computed with less effort than an LP
relaxation of (SPP) and could be incorporated in branch-and-cut [Hoffman and Padberg
1993] to solve the original SPP. We also investigate the reordering ofrows to reduce the
number of segments of consecutive ones in the columns of an SPP.
A. LAGRANGIAN RELAXATION AND SUBGRADIENT OPTIMIZATION
Marsten and Shephardson [1980] form a Lagrangian relaxation on the
reformulated problem and use subgradient optimization. Marsten and Shepardson report
their computational experience on the two-duty problem and suggest further investigation
on three- or four-duty period problems.
Consider the reformulated problem (NS).
minimize dy
(NS) s.t.
Sy=O
y binary
27

By moving constraints Sy = 0 to the objective function, we obtain the following
Lagrangian subproblem:
minimize d'y + p(Sy) y
(LS) s.t. JVy=b
y binary
Hence, the Lagrangian multiplier problem can be written as:
L* = maxJJ {minY { d'y+ p(Sy): JVy = b,y E Binary}}
By Theorem 11.5, the Lagrangian subproblem (LS) yields intrinsically integer
solutions for any choice of p . Thus, the optimal objective values of (LS) and its LP
relaxation are equal.
Furthermore, by Proposition II.9, the optimal value L * of the Lagrangian
multiplier problem is equal to the optimal objective function value of the LP relaxation of
(NS). Thus, even if we find an optimal value for p, we cannot improve on the LP lower
bound. However, the Lagrangian relaxation method may still be preferred if the
convergence is faster than solving the LP relaxation of the SPP by standard means. We
investigate this issue next.
Observe that the Lagrangian subproblem (LS) can be formulated as a directed
acyclic shortest path problem. Hence, (LS) can be solved very efficiently with special
network algorithms (e.g., [Ahuja et al. 1993, pp. 107-108]).
By assumption, for any given vector p we can easily compute L(p), so what is
needed is a way to find a good p (i.e., one that gives a strong upper bound L(p) ). This
28

can be accomplished with a general iterative technique called subgradient optimization.
The k th step of the subgradient method is the following: Fixing the vector 1-l , we
compute an optimal solution l to the Lagrangian subproblem
minY { d'y + f.lk (Sy): JVy = b, y Binary}.
Now, for a specified step size Bk, we let
and go to the (k + r 1) step.
Poljak [1967] provides a convergent step length sequence, but in practice this
sequence is very slow to converge and heuristic sequences are used. One such sequence
(e.g., [Bertsimas and Orlin 1991], [Caprara et al. 1999]) for selecting the step length Bk is
defined by:
where UB is an upper bound on the optimal objective function value of (NS), and ILk is a
scalar chosen between 0 and 2. Parameter ILk controls the step-size along the subgradient
direction (Syk).
The classical Held-Karp approach (e.g., [Held and Karp 1971]) halves parameter
ILk if for p consecutive iterations no lower bound improvement occurs. Caprara et al.
[1999] implement the following alternate strategy: IL0 is set to 0.1. For every p = 20
subgradient iterations, the best and worst lower bounds computed on the last p
29

operations are compared. If these two values differ by more than 1%, the current value of
A is halved. If, on the other hand, the two values are within 0.1% of each other, the
current value of A is multiplied by 1.5. This last decision is motivated by the
observation that either the current 1-l is almost optimal, or the smaller lower bound
difference is a result of an excessively small step-size. Caprara et al. [1999] claim that
compared with classical Held-Karp, this new approach leads to faster convergence to
near-optimal multipliers.
Caprara et al. [ 1999] terminate sub gradient optimization as soon as they estimate
that the procedure converges to a near-optimal Lagrangian vector. This convergence
occurs when the lower bound improvement obtained in the last 300 subgradient iterations
is smaller than 1.0, and, in percentage, below 0.1 %.
Marsten and Shephardson [ 1980] form a Lagrangian relaxation on the
reformulated problem (NS) and use subgradient optimization (incorporated with the Held
Karp approach) to maximize the Lagrangian multiplier problem. Marsten and
Shepardson report their computational experience on the two-duty problem and suggest
further investigation on three- or four-duty period problems.
We also implement the Lagrangian relaxation on the reformulated problem (NS).
The Lagrangian multiplier problem is solved using subgradient optimization, and the
improvements reported by Caprara et al. [1999] are incorporated. Our computational
results are presented in Section III.D.
30

B. EXTERIOR PENALTY METHOD
This section presents an exterior penalty method implemented on the column split
SPP reformulation to obtain a good lower bound that can be computed with less effort
than an LP relaxation of(SPP).
Courant by Bazaraa et al. [1993] suggest the use of penalty methods to solve
constrained problems. Subsequently, Camp [1955] and Pietrgykowski [1962] discuss this
approach to solve nonlinear problems. The latter reference also gives a convergence
proof. Fiacco and McCormick [e.g., 1968] solve practical problems.
Let (NSREL) denote the LP relaxation of the reformulated problem (NS). By
moving constraints Sy = 0 to the objective function with a penalty parameter, we obtain
the following penalty function:
P(a) = minY {dy+a(Sy)'(Sy): 1fy = b,y;:::: 0}
For a fixed value of a, the optimization problem in the right-hand side of the first
equality is called the penalty subproblem (PS). By expressing a(Sy)'(Sy) algebraically,
IKJ!-1 a(Sy)'(Sy) = L L aJ(yJ- yJ+1
)2
}er k=l
we can see that (PS) is clearly a convex non-separable quadratic programming problem
with linear network flow constraints.
As a goes to infinity, a(Sy)'(Sy) goes to zero and constraints Sy = 0 are
satisfied. Hence, the penalty function P( a) converges to the optimal objective function
value of (NSREL). In theory, the solution to the penalty problem can be made arbitrarily
31

close to the LP relaxation of the original SPP by choosing sufficiently large a . However,
in reality if we choose a very large a and attempt to solve the penalty problem, we may
have computational difficulties from the ill-conditioning we have induced. With a large
a, more emphasis is placed on feasibility, and most procedures solving the penalty
problem will quickly progress toward a feasible point. Even though this point may be far
from the optimum, premature termination could occur [Bazaraa et al. 1993].
As a result of the above difficulties associated with very large penalty parameters,
most algorithms using penalty functions employ a sequence of increasing penalty
parameters such as the approach we take:
Initialization Step: Let £ > 0 be a termination scalar. Choose an initial point y1 , a
penalty parameter a1 > 0, and a scalar f3 > 1 . Let k = 1, and proceed to the main step.
Main Step:
1. Starting from Yk , solve the following penalty subproblem:
miny~o {dy +a(Sy)'(Sy): :NY= b}
Let yk+I be an optimal solution and go to Step 2.
2. If ak(Sy)'(Sy) <£,stop; otherwise, let ak+I = f3ak, replace k by k + 1, and go to
Step 1.
The convex quadratic non-separable continuous problem can be solved in
polynomial time. However, with the integrality requirement, the problem becomes NP
Hard [Hochbaum 1993].
32

(PS) can be solved using specialized nonlinear netvvork algorithms (e.g., Dembo
[1987], Hearn et al. [1987]). Our attempts to obtain a quadratic netvvork solver from
these and other sources have been unsuccessful. We implement our penalty method using
the CPLEX 6.6 [ILOG 2000] quadratic programming solver. The CPLEX quadratic
programming solver uses a barrier method (see, Bazaraa et al. [1993, Chapter 9]) that is
not specially designed for solving quadratic netvvork flow problems. Nevertheless, we
still obtain satisfactory performance from the CPLEX solver.
C. ROW REORDERING
By reordering the rows, we may reduce the number of consecutive ones segments
in the columns of an SPP. Hence, the Lagrangian subproblem or the penalty subproblem
will be smaller and this may improve solution efficiency.
The optimal reordering of the rows to minimize the number of segments of
consecutive ones in an SPP is a combinatorial optimization problem. Enumerating all
row permutations and choosing the one with the minimum number of segments of
consecutive ones is optimal. However, there are m! row permutations, and computing
the number of segments for each of these m! orderings may be more difficult than
solving the original SPP.
A more elegant way to state the row-ordering problem is as follows:
For each pair of rows (i, j) , we find the number of columns that have a + 1 entry
in one row, but not the other. Let cif denote such a number for rows i and j. For
• fi I d I mstance, or row vectors a1 an a j :
33

I
[1 0 0 0 1 1] aj = I
[0 0 0 1 1 OJ aj =
cij =3.
Next, we form an undirected graph GA = (N,E), and define a node i eN for
each row a/ of A . We also define an artificial starting node s e N . We join all nodes
i ::f:: j e N by an edge (i, j) e E, and assign the arc length cij. Let csj = 0 for all j eN .
Note that GA is a complete graph (i.e., every pair of nodes in GA is connected by an
edge).
Given GA, we determine a tour W (i.e., a cycle that visits each node in the
network exactly once) with the smallest possible value of the tour length, .L cij . The (i,j)eW
order of the rows associated with ordered nodes i eN \{s} in tour W is the optimal
ordering that minimizes the number of segments of ones in an SPP.
Given a complete graph GA = (N,JE), determining a tour W with the smallest
possible value of the tour length, L cij , is known as the Traveling Salesman Problem (i,j)eW
(TSP). TSP is perhaps the most famous problem in all of network and combinatorial
optimization. In a colloquial description of the problem, a salesman must visit each of n
cities exactly once and then return to his starting point. The time taken to travel from city
i to j is cij . Find the order in which the salesman should make his tour so as to finish as
quickly as possible.
34

A collection of papers tracing the history and research on TSP can be found in
Lawler et al. [1985]. TSP belongs to the class of NP-Complete problems.
Solving the row-reordering problem to optimality is computationally expensive.
However, some of the polynomial-time TSP heuristics can be used to obtain near-optimal
results quickly.
A simple greedy approach for TSP (and hence the row-ordering problem) is the
nearest neighbor heuristic. We start from nodes, and at each iteration we reach a node
that does not close a cycle and minimizes the new path constructed. In particular, after k
iterations, we have a path { s, iP ... , ik} consisting of distinct nodes, and the next iteration,
we add an arc (ik,ik+J that minimizes ciki over all arcs with i-:~= s,iw .. ,ik. After m
iterations, all nodes are included in the path, which is then converted to a tour by adding
the final arc (im, s) .
Given a tour, we may try to improve its length by using a method that changes the
tour incrementally. A popular method for TSP with cif = cji' Vi,j, is the k-OPTheuristic.
The k-OPT heuristic creates a new tour by exchanging k arcs of the current tour with
another k arcs that do not belong to the tour. The k arcs are chosen to optimize the length
of the new tour with O(mk). The method stops when no improvement of the current tour
is possible through a k-interchange. For comprehensive information on the k-OPT
heuristic and other TSP heuristics that can be incorporated to the row-reordering problem,
the reader is referred to Cook et al. [1998].
35

D. COMPUTATIONAL RESULTS FOR THE SPP LOWER BOUND ALGORITHMS IMPLEMENTED WITH THE COLUMN SPLITTING REFORMULATION
In this section, we investigate the Lagrangian relaxation and the exterior penalty
method with the column split reformulation for various problems including:
(i) an instance of the aircraft carrier problem,
(ii) sample data from two-, three-, and four-duty period problems, and
(iii) a subset of real-world airline crew scheduling problems.
We also explore the impact of row reordering on the solution times and lower
bounds obtained using the Lagrangian relaxation and the penalty method.
All sample problems are solved using the CPLEX 6.6 [ILOG 2000] optimization
solver on a Pentium III 650Mhz personal computer with 192Mb RAM. The Lagrangian
relaxation procedure is implemented using the Compaq Visual Fortran [1999]
programming language. The Lagrangian subproblems are solved using the network
simplex solver GNET [Bradley et al. 1975].
Table III.l shows computational results obtained for the Lagrangian relaxation
procedure and the penalty method implemented on the reformulated problem (NS).
The test data with the SPPNW prefix are a subset of real-world airline crew
scheduling problems (also used by Hoffman and Padberg [1993]) obtained from the
online OR-Library [2000] presented by J.E. Beasley. Our computational experience
shows that the number of consecutive ones segments for an airline crew scheduling
problem is proportional to problem size (i.e., the number of consecutive ones segments
increases as the numbers of rows and columns increase). The airline crew scheduling
36

problems tested in this chapter are small in size so that we can obtain modest numbers of
consecutive ones segments, and consequently, we can demonstrate the convergence speed
of our algorithms, using real-world data.
The sample data named Carrier is an instance of the aircraft carrier scheduling
problem presented in Chapter VI. The rest of the data are generated randomly to obtain
two-, three-, and four-duty period scheduling problems. The starting time, the length of
each duty period in an alternate schedule, and the corresponding cost coefficient are
generated from a uniform distribution with associated parameters. For a k-duty period
scheduling problem, each alternate schedule is generated to contain at most k segments of
consecutive ones.
Table III.l lists the solution times and the lower bound values for each example
obtained using the penalty method and Lagrangian relaxation, as well as the simplex, dual
simplex, and barrier methods.
37

Data Cols Rows Segs LPLB IP Simplex Dual Bar Penalty Lagrangian Relaxation
Iters 10 100 1,000 10,000
SPPNW23 711 19 1,427 12,317 12,534 0.03 0.04 0.06 0.60 Time 0.01 0.61 4.61 40.59
LB 5,238 7,409 8,507 9,977
lters 10 100 1,000 10,000
SPPNW26 771 23 1,685 6,796 6,796 0.04 0.03 0.06 0.52 Time 0.01 0.71 6.70 52.00
LB 3,799 5,326 5,531 6,098
lters 10 100 1,000 10,000
SPPNW28 1,210 18 3,905 8,169 8,298 0.05 0.05 0.08 0.98 Time 0.17 1.32 11.20 29.00
LB 4,736 6,504 6,903 7,092
lters 10 100 1,000 10,000
SPPNW31 2,662 26 11,470 7,980 8,038 0.14 0.10 0.40 2.29 Time 0.55 4.72 40.21 391.00
LB 2,917 3,851 4,122 4,827
Iters 4 10 1,000 10,000
Carrier 2,248 622 544 447 460 0.18 0.13 0.25 0.70 Time 0.04 0.09 7.69 83.00
LB 305 418 440 440
Two- lters 2 4 100 10,000
Duty I 2,612 129 60 423 431 0.84 0.64 0.90 0.45 Time 0.01 0.02 0.42 39.00
LB 398 407 416.3 422.20
Two- lters 3 10 1,000 10,000
Duty II 5,896 256 51 1,244 1,318 LIO 0.89 !.52 0.63 Time 0.05 0.10 8.00 96.00
LB 1,136 1,198 1,239 1,239
Three- lters 4 10 100 10,000
Duty I 4,434 523 313 6,236 6,353 2.16 0.88 1.40 0.83 Time 0.07 0.09 0.93 105.00
LB 4,513 5,192 6,205 6,228
Three- Iters 5 10 100 10,000
Duty II 6,158 541 367 4,622 4,953 2.63 1.16 1.83 1.01 Time 0.10 0.34 3.70 43.00
LB 4,236 4,449 4,513 4,615
Four- lters 10 100 1,000 10,000
Duty I 8,032 541 2,187 12,243 12,450 14.17 2.78 2.86 2.89 Time 0.25 1.60 17.00 163.00
LB 7,215 8,133 10,098 11,917
Four- Not lters 2 3 100 10,000
Duty II 5,845 503 929 133 133 6.15 !.55 2.34 converged Time 0.04 0.04 1.23 122.00
LB 119 132.65 132.65 132.65
Four- lters 2 5 100 10,000
Duty III 5,845 541 1,758 4,155 4,432 29.16 7.27 3.15 2.68 Time 0.08 0.10 1.47 150.00
LB 3,533 3,823 3,823 3,852
Table 111.1. Comparison of Lagrangian Relaxation and Exterior Penalty Methods
with Linear Programming Solvers. From left to right, Cols, Rows, and Segs refer to
the numbers of columns, rows, and consecutive ones segments, respectively. LPLB
denotes the lower bound value obtained by solving the LP relaxation of the original SPP.
IP is the optimal objective value of the original SPP. Simplex, Dual, and Bar refer to LP
relaxation solution times using the simplex, dual simplex, and barrier methods,
respectively. Iters denotes the number of subgradient iterations. LB is an abbreviation
for lower bound. Time and lower bound results are listed for various numbers of
subgradient iterations. The Not converged statement for the Four Duty II sample problem
means that the penalty method does not converge to the optimal solution, due to ill
conditioning. All times in the table are in 650Mhz Pentium III seconds.
38

For airline crew scheduling sample problems that do not exhibit a consecutive
ones structure, the convergence of Lagrangian relaxation is not satisfactory. By contrast,
for most of the sample duty scheduling problems, Lagrangian relaxation yields a lower
bound faster than the other methods. However, obtaining a lower bound within 1% of the
LP relaxation lower bound using Lagrangian relaxation usually requires an excessive
number of iterations and long solution times.
For all sample problems except Four-Duty II, the penalty method converges to the
LP lower bound in at most three iterations. It fails to converge for Four-Duty II.
Our computational experience shows that, for certain problems with consecutive
ones structure, the Penalty method presented yields lower bound values faster than the
simplex, dual simplex, and barrier methods. Using a specialized quadratic network solver
would presumably result in even further improvements in the penalty subproblem
solution times. However, the reliability of this technique, especially on larger problems,
is suspect.
Next, we investigate the impact of row reordering on the solution times and lower
bounds obtained using the penalty method and the Lagrangian relaxation. Because the
carrier model and the k-duty period problems in Table III.l are generated with intrinsic
row ordering that exhibit columns with consecutive ones, we exclude these examples
from our experimentation. The airline crew scheduling sample problems that do not
exhibit a consecutive ones structure are of special interest. Given the existing row order,
a 2-0PT TSP heuristic is used to minimize the number of segments of consecutive ones
for each sample problem.
39

Table ill.2 lists the solution times for each sample problem using the penalty
method before and after implementing a 2-0PT row-reordering heuristic. The sample
problems are obtained from the online OR-Library [2000] presented by J.E. Beasley.
Because the number of airline crew scheduling samples in Table ill. I is only four, we
include additional samples/ of various sizes.
Data Cols Rows OrgSegs ReordSegs %DecSegs ReordTime LPRel OrgPen ReordPen %DecTime
SPPNW06 6,774 50 32,566 20,161 38 0.50 0.39 16.72 12.86 23
SPPNW07 5,172 36 20,360 13,954 31 0.22 0.23 6.65 4.44 33
SPPNW09 3,103 40 11,354 7,748 32 0.11 0.25 5.20 2.59 50
SPPNW11 8,820 39 33,065 24,786 25 0.38 0.39 21.12 11.65 45
SPPNW23 711 19 1,427 1,013 29 0.00 0.03 0.60 0.31 48
SPPNW26 771 23 1,685 1,222 27 0.00 0.04 0.52 0.33 37
SPPNW27 1,355 22 4,372 2,634 40 0.00 0.14 1.25 0.83 34
SPPNW28 1,210 18 3,905 2,450 37 0.00 0.05 0.92 0.60 35
SPPNW29 2,540 18 7,322 5,516 25 0.05 0.13 4.43 2.87 35
SPPNW31 2,662 26 11,470 7,112 38 0.05 0.14 4.59 2.21 52
SPPNW33 3,068 23 11,117 8,243 26 0.11 0.26 5.83 2.81 52
SPPNW35 1,709 23 4,839 3,887 20 0.06 0.18 2.26 1.12 50
SPPNW36 1,783 20 6,823 3,883 43 0.06 0.27 2.92 1.70 42
SPPNW38 1,220 23 3,975 2,258 43 0.00 0.16 1.72 0.73 58
SPPNW43 1,072 18 2,443 1,899 22 0.00 0.56 0.70 0.54 23
Table 111.2. Comparison of the Solution Times Obtained Using the Exterior Penalty Method before and after Row Reordering. From left to right, Cols, Rows, OrgSegs,
and ReordSegs refer to the numbers of columns, rows, and consecutive ones segments
before and after row reordering, respectively. %DecSegs denotes the percent decrease in
the number of consecutive ones segments after row reordering. Reordtime is the time to implement the 2-0PT row-reordering heuristic. LPRel denotes the LP relaxation solution time using the simplex method. OrgPen and ReordPen refer to the solution times using the exterior penalty method before and after row reordering, respectively. %DecTime denotes the percent decrease in the solution time after row reordering. All times in the table are in 650Mhz Pentium ill seconds.
By reordering the rows of each sample problem using a 2-0PT TSP heuristic, we
obtain a 32% average decrease in the number of segments of consecutive ones.
Furthermore, the solution times obtained using the exterior penalty method before and
40

after reordering the rows improve an average of 41%. For SPPNW43, after reordering,
we obtain a better solution time using the exterior penalty method than solving the
original LP relaxation using the simplex method.
Table IIL3 lists the solution times and the lower bound values obtained using the
Lagrangian relaxation before and after reordering the rows for each example in Table
III.2.
41

Before Reordering After Reordering
Data LPLB IP LPRe liters 10 100 1,000 10,000 10 100 1,000 10,000
SPPNW06 7,640.0 7,810 0.39 Time 2.09 15.16 128.00 1278 1.21 10.00 99.69 870.00
LB 1,897 3,128 3,385 3,949 1,972 3,399 3,687 4,507
SPPNW07 5,476.0 5,476 0.23 Time 1.26 10.22 84.00 797 0.82 6.26 52.00 558.00
LB 2,484 3,854 4,073 4,630 2,948 4,311 4,650 5,002
SPPNW09 67,760.0 67,760 0.25 Time 0.72 5.44 49.27 460 0.39 3.29 28.34 252.00
LB 7,263 13,130 14,268 16,451 10,029 14,165 15,841 16,947
SPPNW11 11,6254.5 116,256 0.39 Time 2.20 14.89 117.00 1,184.00 2.03 13.96 113.00 1,080.00
LB 9,252 13,375 14,422 17,936 10,155 14,717 16,336 21,631
SPPNW23 12,317.0 12,534 0.03 Time 0.01 0.61 4.61 40.59 0.00 0.44 4.22 33.00
LB 5,238 7,409 8,507 9,977 5,959 7,715 8,922 10,062
SPPNW26 6,796.0 6,796 0.04 Time 0.01 0.71 6.70 52.00 0.00 0.44 3.73 31.00
LB 3,799 5,326 5,531 6,098 4,725 5,526 5,933 6,456
SPPNW27 9,877.5 9,933 0.14 Time 0.22 1.59 12.30 38.72 0.11 0.94 3.46 3.46
LB 4,303 7,200 7,996 8,562 6,274 8,270 8,562 8,562
SPPNW28 8,169.0 8,298 0.05 Time 0.17 1.32 11.20 29.00 0.05 0.77 1.00 1.00
LB 4,736 6,501 6,903 7,092 6,624 6,954 7,092 7,092
SPPNW29 4,185.3 4,274 0.13 Time 0.33 3.13 27.79 284.00 0.28 2.04 17.74 178.00
LB 2,441 2,834 2,943 3,201 2,596 2,859 3,076 3,262
SPPNW31 7,980.0 8,038 0.14 Time 0.55 4.72 40.21 391.00 0.27 2.58 24.22 230.00
LB 2,917 3,851 4,122 4,827 3,253 4,284 4,564 5,829
SPPNW33 6,484.0 6,678 0.26 Time 0.72 5.27 42.62 423.37 0.49 4.17 33.00 367.00
LB 2,574 3,687 3,896 4,286 2,700 3,875 4,132 4,836
SPPNW35 7,206.0 7,216 0.18 Time 0.22 1.81 14.34 127.00 0.17 1.26 10.77 52.00
LB 4,488 5,727 6,158 7,138 5,140 5,940 6,537 7,141
SPPNW36 7,260.0 7,314 0.27 Time 0.27 2.63 24.55 209.00 0.17 1.42 12.46 100.00
LB 2,568 4,137 4,434 5,061 3,217 4,505 4,819 5,318
SPPNW38 5,552.0 5,558 0.16 Time 0.16 1.42 10.71 125.00 0.11 0.77 4.94 5.00
LB 3,540 4,370 4,561 4,798 4,072 4,727 4,798 4,798
SPPNW43 8,897.0 8,904 0.56 Time 0.11 0.88 7.08 69.00 0.06 0.66 5.55 53.00
LB 5,513 7,283 7,847 8,438 6,013 7,617 8,125 8,438
Table 111.3. Comparison of the Solution Times and Lower Bound Values Obtained Using the Lagrangian relaxation before and after Row Reordering. LPLB denotes the lower bound value obtained by solving the LP relaxation of the original SPP. IP is the optimal objective value of the original SPP. LPRel denotes the LP relaxation solution time using the simplex method. Iters denotes the number of sub gradient iterations. LB is an abbreviation for lower bound. Solution times and lower bound values obtained using the Lagrangian relaxation before and after row-reordering are displayed for various numbers of subgradient iterations. All times in the table are in 650Mhz Pentium III seconds.
42

After reordering the rows, the solution times and the lower bound values obtained
using the Lagrangian relaxation improve an average of 41% and 13%, respectively.
Our computational results show that, by using a row reordering heuristic, or by
logically ordering the rows of the seminal SPP (e.g., Bausch et al. [1995, pg. 7]) to obtain
minimal consecutive ones segments, the SPP lower bound algorithms presented here can
be implemented with significantly less computational effort.
We also observe that the convergence rate of the Lagrangian relaxation and the
exterior penalty methods are inversely proportional to the number of consecutive ones
segments. That is, the efficiency decreases as the number of ones segments increases.
The airline crew scheduling problems tested here are small. However, the ratio of
the number of segments to the number of columns is relatively high. Because the size of
each sample problem is small, the LP relaxation of each sample SPP can be solved in a
short amount of time.
On the other hand, the convergence rate of the exterior penalty method and the
Lagrangian relaxation are more dependent to the number of consecutive ones segments
than on the size of the seminal SPP. When we reorder the rows of each sample problem
using a 2-0PT heuristic, the size of the sample does not change, but we reduce the
number of consecutive ones segments. Moreover, when we reduce the number of
consecutive ones segments for each sample problem, the exterior penalty method and the
Lagrangian relaxation converge faster.
43

THIS PAGE INTENTIONALLY LEFT BLANK
44

IV. INTEGRATING A ROW SPLIT TECHNIQUE WITH BENDERS DECOMPOSITION
This chapter presents a new algorithm to solve binary programming problems
(e.g., SP, SC, or SPP) whose rows contain segments of consecutive ones. The algorithm
first constructs a reformulation of the original binary problem by splitting each row to
obtain exactly one segment of consecutive ones and additional auxiliary variables in the
newly formed rows. The auxiliary variables are used to link the split rows so that they
collectively represent equivalent feasible solutions. The special structure in the
reformulated problem invites the use of Benders decomposition to solve, or at least bound
the solution of SP, SC or SPP. The performance of the new algorithm is tested on a
subset of the U.S. Navy aircraft carrier scheduling problem, and the airline crew
scheduling data obtained from OR-Library [2000].
A. ROW SPLITTING TECHNIQUE
Consider the SPP given by (SPP) in Chapter II.
In (SPP), for each row vector a/ we define a segment of ones as a consecutive set
of segments of ones for row i containing the information where each segment starts and
ends in terms of pairs of ordered column indices (e.g., K; = { (/;,( + P;), ......... } ). IK;I
denotes the number of segments in row i . Let <l> be the set of rows that have more than
one segment of ones (i.e., <l> = { i : IK; I > 1} ). Let a: be a vector of size n , such that
45

a; = 1 if the j th element of row is in the k th segment of Ki in (SPP), and a; = 0
jK;I
otherwise. Note that the sum of aik for all k is equal to the vector ai (i.e., I at= a,.).
Using the split vectors a,.k, (SPP) can be equivalently formulated as:
(RS)
n
minimize L c jx j j=!
n
s.t. Ia~xj = 1 j=1
'ifi E <l>
'iii E <l>,k = 2, ... ,1Kil
'iii e <1>, j and k = l, ... ,!Kil-1
k=1
(IV.l.a)
(IV.l.b)
(IV.l.c)
(IV.l.d)
(IV.l.e)
Binary variables s: are used to bind the split vectors a: , k = 1, ... , IKi I , to each other so
that the original constraints of(SPP) are preserved.
Using matrix notation, (RS) can be written as:
minimize c'x
(RS) s.t. Fx+Gs=b
x,s binary
46

Proposition IV.l: If (x.,s*) is an optimal solution to (RS), then x is an optimal
solution to (SPP).
Proof: The objective functions of (SPP) and (RS) are the same. We need to show that
the feasibility of each original constraint in (SPP) is preserved in the reformulated
problem (RS). If IKil =1 for some row i of (SPP), then row i is unchanged in (RS).
However, if IK;I > 1, then row vector a/ is split into vectors a: for all k = 1, ... ,1Kjl·
Suppose that IK;I > 1 for some row i in (SPP). Let Ni be the set of column indices that
have non-zero entries in row i. To satisfy constraint i, exactly one of the variables xj
must be equal to one for all j e Ni. Suppose, x1 = 1 for a feasible solution to (SPP). Let
the non-zero entry corresponding to x1 be in segment r ofrow i (i.e., a~ = 1 ).
If r is the first segment, then s: = 0 in (RS) for all k = 1, ... , !Ki 1-1.
Consequently, variables xj = 0 for all j e Ni \ l. If r > 1, then s;-1 = 1 implying that
si* = 0 for all k = {1, ... ,!Kil-1} \r, and xj = 0 for all j e Ni \!.
Hence, we have shown that the reformulated problem forces x ~ 1. Now we need
to show x ~ 1 is forced as well. Suppose xj = 0 for all j e Ni. Then, to satisfy
constraint i of (IV.1.c ), exactly one of s: must be equal to one for all k = 1, ... , !Ki 1-1, say
s; = 1. However, this result violates constraint i, k = (r + 1) of (IV.l.d). Thus, x ~ 1 is
also forced in (RS). QED
47

Using a similar logic it can be shown that the LP relaxation of (RS) and (SPP) are
also equivalent.
Because matrix F of (RS) has exactly one segment of consecutive ones in each
row, then the transpose matrix F' has exactly one segment of consecutive ones in each
column. Hence, F' is an interval matrix. Interval matrices are TU (Corollary 2.10,
[Nemhauser and Wolsey 1988, pg. 544]). By Proposition II.4, a matrix is TU if and only
if the transpose of this matrix is also TU. Thus, F is a TU matrix.
Matrix G of (RS) has exactly one + 1, and one -1 in each column. Therefore, by
Proposition II.6, G is also a TU matrix.
Observe that the dual of the LP relaxation of (RS) can be solved using the
Lagrangian relaxation or the exterior penalty method to obtain lower bound values on
(RS) or (SPP).
The following example illustrates row splitting of a numerical SPP.
Example IV.2: Consider the following SPP where m = 6, and n = 8.
minimize c'x
(SPP) s.t. Ax=e
x binary
d= [ 3 2 5 6 9 4 3 5]
1 1 1 0 0 0 1 1 1 0 0 1 1 1 0 0
A= 0 0 1 1 0 0 0 1 0 1 1 1 1 0 0 0
1 0 0 1 1 0 0 1 1 1 1 1 0 0 0 1
48

We split the rows of A to obtain the following matrix, F.
al I 1 1 1 0 0 0 0 0
a2 I 0 0 0 0 0 0 1 1 I
a2 1 0 0 0 0 0 0 0 a2
2 0 0 0 1 1 1 0 0 a!
3 0 0 1 1 0 0 0 0 2
F= a3 0 0 0 0 0 0 0 1 a!
4 0 1 1 1 1 0 0 0 I
as 1 0 0 0 0 0 0 0 2
as 0 0 0 1 1 0 0 0 a3 s 0 0 0 0 0 0 0 1
I a6 1 1 1 1 0 0 0 0 a2
6 0 0 0 0 0 0 0 1
Thus, the equivalent reformulation is as follows:
min 3x1 +2x2
+5x3 +6x4 +9x5 +4x6 +3x7 +5x8
s.t. XI +xz +x3 +st I 1
+x7 + x8 -s{ 0
XI +sl
2 1
+x4 +x5 +x6 -s~ 2 0
+x3 +x4 +sl 3 1
+xs -s~ 3 0
+xz +x3 +x4 +x5 = 1
XI +sl +s2 5 5 = 1
+x4 +x5 -s~ 5 0
+xs -sz 5 0
XI +xz +x3 +x4 +sl 6 1
+xs -s~ 6 0
x3' x5, x6, x7, Xg I I I I 2 I {0,1} XI, x2, x4, sl' Sz' s3' Ss' Ss' s6 E
49

For instance, if x1
= 1 , then s ~ and s: must equal zero. Consequently, x4 , x5 , and x8
must equal zero as well. Hence, the original constraint,
is satisfied. If x8
= 1 , then s; = 1 . Consequently, s~ = x1 = x4 = x5 = 0, and the original
constraint above is still satisfied. Observe that x1 = x4 = x5 = x8 = 0 is infeasible in the
reformulated problem.
End of Example IV.l
Different equivalent reformulations of (SPP) can also be derived using the row
splitting technique. For instance, Constraints (IV.l.c) and (IV.l.d) can also be written as:
n
'La~xj +sJ = 1 ViE <1> (IV.2.a) j=l
ViE <l>,k = 2, ... ,1Kil-1 (IV.2.b)
ViE <1> (IV.2.c)
Note that the LP relaxation of the equivalent reformulation (IV.2) is equal to the LP
relaxation of (SPP).
With minor adjustments, the arguments stated in this section for the reformulation
of SPP also hold for SC and SP.
50

B. IMPLEMENTING BENDERS DECOMPOSITION ON THE ROW SPLIT REFORMULATION
The special structure in (RS) suggests the use ofBenders decomposition.
Benders decomposition isolates and exploits special problem structure by fixing
some of the variables. Benders decomposition for mixed-integer programming is
described in Benders [1962]. For an expository review of Benders decomposition the
reader is referred to Parker and Rardin [1988, pp. 237-249].
Consider the reformulated problem (RS).
minimize c'x (N.3.a) x.s
(RS) s.t. Fx+Gs=b (IV.3.b)
x,s binary (IV.3.c)
In Section A, we have shown that F is a TU matrix. To identify the special
structure ofF, we fix variables in (RS) to a 0-1 vector s, and move Gs to the right-hand
side of the equality (ill.3.b). Thus, we obtain the following formulation:
minimize c'x (N.4.a) X
(RSF) s.t. Fx = b-Gs (IV.4.b)
x binary (IVA. c)
The column vector (b- Gs) is integral. By Theorem II.5, the LP relaxation of
(RSF), obtained by relaxing (IV.4.c) to 0::;; x::;; 1, yields integral solutions. Moreover, we
can ignore the upper bound x ::;; 1 for an SPP, because x intrinsically cannot be greater
than one. Thus, (RSF) can be equivalently written as:
51

minimize c'x (IV.5.a) X
(RSF) s.t. Fx=b-Gs (IV.5.b)
x20 (IV.5.c)
Because variables s are fixed to s , (RSF) is a restriction of (RS). Hence, the
objective function value of(RSD) is an upper bound on the objective value of(RS).
Taking the duazt of (RSF), we obtain the following problem:
maximize p'(b-Gs) (IV.6.a) p
(RSD) s.t. p'F~c (IV.6.b)
p free (IV.6.c)
where the row vector p represents the dual variables. We may assume that c is an
integral vector: by scaling c with a sufficiently large number, we can truncate c to an
integral vector. This transformation does not appreciably affect the optimal value of x in
(RSF). Thus, by Theorem II.5, if there exists a finite optimal solution to (RSD), then
(RSD) will yield integral solutions.
Moreover, (RSD) can be transformed to a minimum cost networkjlow problem+.
Observe that the constraint coefficient matrix F' of (RSD) is an interval matrix. In
Chapter II Section A, we show that an interval matrix can be transformed to a network
matrix using elementary matrix operations.
tnuals and duality theory are introduced in introductory texts such as Bertsimas and Tsitsiklis [1997].
+Network flow problems are introduced in introductory texts, e.g. Ahuja et al. [1993, Chapters 9, 10, 11]
52

Primal problem (RSF) is bounded; however it may be infeasible for some values
of s. Without loss of generality, we may assume that there exists a feasible solution to
(RSF) for some value of s. This assumption holds because (RSF) can be elasticized using
artificial variables with sufficiently high cost coefficients in the objective function. If
(RSF) is infeasible for some value of s, then (RSD) is either unbounded or infeasible by a
corollary of the duality theorem of LP. Because p is a free variable and F is a 0-1 matrix,
(RSD) cannot be infeasible. Thus, (RSD) can only be unbounded. We may avoid this
problem either by elasticizing (RSF), or by forcing bounds on p in (RSD). Let us define
some bounds onp in (RSD).
maximize p' ( b- Gs) (IV.7.a)
(RSD) s.t. p'F:::;c (IV.7.b)
(IV.7.c)
Hence, by the strong duality theorem of LP, if (RSF) has an optimal solution, then so
does (RSD), and the respective optimal costs are equal.
Let {i ,p2 , ••• ,pQ} be the set of extreme points of {l:::; p:::; u: p'F:::; c}. Let
H < Q . Then the problem,
minimize z z free, se{O,l}
(RSREL) s.t.
(IV.8.a)
h =l, ... ,H (IV.8.b)
is a relaxation of problem (RS). Problem (RSREL) is called Benders relaxation and
problem (RSF) is called Benders restriction.
53

For fixed values of variable p , Benders relaxation problem yields a lower bound
for the reformulated problem (RS). And, for fixed values of dual variable s , Benders
restriction yields an upper bound. Benders decomposition algorithm solves Benders
relaxation and Benders restriction problems alternately to obtain monotonically
improving lower bounds (if the relaxation is solved exactly) and non-monotonic upper
bounds, respectively. Because polyhedron {I:::;; p:::;; u: p'F:::;; c} has a finite number of
extreme points, improved upper and lower bound values in Benders decomposition
converge to an optimal solution in a finite number of iterations.
We present below an iteration diagram of the Benders decomposition algorithm
implemented on the reformulated problem (RS).
Initialization Step: Select a convergence tolerance parameter & 2::0, and an integrality
tolerance 8 > 0 (i.e., in the optimal solution to a B&B subproblem, the value of a
variable is considered integral if it lies within 8 of an integer) for the solution of Benders
relaxation problems. Specify a termination scalar K that limits the number of iterations
required. Let the initial upper bound (UB) be +oo, and the initial lower bound (LB) be
-oo. Choose an initial point s. Let k = 1, and proceed to the main step.
54

Main Step:
1. Solve the Benders restriction problem with the fixed values of s obtained
either from the initialization step, or from the solution of the last Benders
relaxation problem.
Let UB =min {UB, optimal value of Benders' restriction}.
2. If k < K and UB- LB > & , then
Else,
Use optimal dual variables from the solution of the last Benders
restriction problem to define a new constraint (cut) in the Benders
relaxation problem.
Solve Benders relaxation problem using 8 > 0.
Let LB = max { LB, Optimal value of Benders' relaxation} .
Let k=k+1
Go to Step 1.
Stop.
End of if statement.
The Bender's restriction problem (RSD) is a minimum-cost pure network flow
problem. Hence, (RSD) can be solved very efficiently with special network flow
algorithms (e.g., [Ahuja et al. 1993, Chapters 9, 10, 11]).
The number of columns in (RSD) is the same as the number of columns in the
original (SPP). The number ofrows in (RSD) is equal to the total number of segments of
55

ones in (SPP). The number of binary variables in the Benders relaxation problem
(RSREL) is equal to the sum of segments of ones minus one, for each row in (SP P).
By reordering the columns, we may reduce the number of consecutive ones
segments in the rows of an SP, SC, or SPP. Hence, the Bender's relaxation problem has
smaller sizes that may further yield improved solution performance. The arguments
stated in Chapter III, Section C for row reordering can similarly be used for column
reordering, simply by replacing rows with columns.
C. GENERATING IMPROVED FEASIBLE SOLUTIONS FOR SP AND SC PROBLEMS
1. SP Problem
Using the same notation for (SPP), the row split reformulation problem for (SP)
can be written as:
maximize c'x (IV.9.a) X
(RSSP) s.t. Fx+Gs-:;, b (IV.9.b)
x,s binary (IV.9.c)
56

The Benders restriction and Benders relaxation problems for (RSSP) are given by
(RESSP) and (RELSP), respectively:
maximize c'x (N.IO.a) X
(RESSP) s.t. Fx~b-Gs (N.IO.b)
x::::O (N.IO.c)
maximize z (N.ll.a) z free, se{O,I}
(RELSP) s.t. h=I, ... ,H (N.ll.b)
IK,[-1
Ist ~1 ViE <l> (N.ll.c) k=!
where ph is the dual price vector obtained from (RESSP) in iteration h of the Benders
decomposition algorithm.
Constraints (N.ll.c) ensure that (RESSP) is feasible for any value of s obtained
from (RELSP). Every feasible solution x to (RESSP) is also feasible to (SP). Hence,
by using the Benders decomposition algorithm, we can generate improved feasible
solutions (i.e., feasible solutions having an improved objective value) for an SP problem.
2. SC Problem
Consider the following row split reformulation problem for (SC).
minimize c'x (N.l2.a)
(RSSC) s.t. Fx+Gs::::b (N.l2.b)
x,s binary (N.l2.c)
57

The Benders restriction and Benders relaxation problems for (RSSC) are given by
(RESSC) and (RELSC), respectively:
minimize c'x
(RESSC) s.t.
maximize z z free, se{O,l}
(RELSC) s.t.
Fx?.b-Gs
x?.O
h = l, ... ,H
(IV.13.a)
(IV.13.b)
(IV.13.c)
(IV.l4.a)
(IV.l4.b)
Note that (RESSC) is feasible for any value of s obtained from (RELSC).
Every feasible solution x to (RESSC) is also feasible to (SC). Hence, the Benders
decomposition algorithm can be used to generate improved feasible solutions for an SC
problem.
(RELSP) and (RELSC) are integer programming problems which can be
expensive to solve to optimality during the implementation of the Benders
decomposition. By solving (RELSP) and (RELSC) to feasibility within a required
optimality tolerance () > 0 (i.e., the objective value of the admissible feasible solution is
within about 100. () . % of the optimum), we may still obtain improved feasible solutions
for an SP or SC problem, respectively (e.g., [Brown et al. 1987b]).
58

D. COMPUTATIONAL RESULTS FOR THE NEW ROW SPLIT BENDERS DECOMPOSITION (RSBD) ALGORITHM
The U.S. Navy aircraft carrier scheduling problem is one of many that inherently
have long segments of consecutive ones in their rows. A partial list of other applications
in the literature includes: Brownell and Lowerre [1976], Baker [1976], Bartholdi et al.
[1980], Wing [1986], Brown et al. [1987a], Brown et al. [1990], Bausch et al. [1998].
Table IV.1 shows results with real data and the new row split Benders decomposition
algorithm.
The sample problems are generated for twelve carriers and for various
maintenance period shifting scenarios, using the ten-year schedule data taken from
OPNAV Report 4710 [1996a]. Maintenance period shifting of an aircraft carrier is
described in detail in Chapter VI.
Because it takes only one day for an aircraft carrier to transit from the Persian
Gulf to the Mediterranean, sample problems are generated from a scenario that unifies the
coverage of CENTCOM and EUCOM AORs. That is, the two AORs are considered as
one, and the coverage is maximized (or the uncovered periods are minimized) for the
unified AOR. We adapt this scenario to obtain various numbers of consecutive ones
segments for each sample problem.
Table IV.1 shows the solution times for both the original SPP model and the new
algorithm. Additionally, the number of Benders iterations is provided for each sample
problem to indicate the convergence rate of the decomposition.
59

Problem Cols Rows Segs Ratio: Segs/Cols Iters CPLEXB&B RSBD
1 877 579 30 0.03 2 1.1 0.1
2 896 581 43 0.05 4 1.2 0.2
3 914 582 60 0.07 1 1.2 0.1
4 932 609 93 0.10 4 1.4 0.3
5 945 621 114 0.12 4 1.7 0.3
6 925 629 155 0.17 3 1.5 0.2
7 954 638 162 0.17 5 1.7 0.3
8 960 643 173 0.18 5 1.7 0.3
9 972 643 189 0.19 4 1.6 0.4
10 1,024 667 230 0.22 5 1.9 0.4
11 1,113 676 244 0.21 5 1.9 1.7
12 1,168 682 431 0.37 17 2.3 3.4
Table IV.l. Computational Results for the Row Split Benders Decomposition. From
left to right, Cols, Rows, and Segs refer to the numbers of columns, rows, and
consecutive ones segments, respectively. Iters denotes the number of Benders iterations.
Solution times for both the original SPP model and the row split Benders decomposition (RSBD) are listed as well as the number of Benders iterations (or cuts) generated by the row split Benders decomposition. Each original SPP is solved directly using CPLEX 6.6 [ILOG 2000]. All computations are implemented on a Pentium ill 550Mhz personal computer with 384Mb RAM.
The new algorithm yields faster solution times for all sample problems but sample
12. Considering the numbers of Benders iterations, the convergence speed of the new
algorithm is satisfactory for all sample problems.
Table IV.l shows some instances where the row split Benders decomposition
solves the set partition faster than conventional means. We conjecture that, given the
difficulty of solving set partitions, there exist instances that the row split Benders
decomposition will solve that defy conventional means.
Next, we investigate the impact of column reordering on the performance of our
new algorithm. We also test the performance of the new algorithm in generating
improved feasible solutions for some instances ofSP, SC, or SPP.
60

Because the carrier model is generated with intrinsic column ordering that
exhibits rows with consecutive ones, we omit it from our experimentation. Here, airline
crew scheduling problems that do not exhibit a consecutive ones structure are of more
interest. Our computational experience shows that the number of consecutive ones
segments in the rows of an airline crew scheduling problem is proportional to the problem
size (i.e., the number of consecutive ones segments increases as the numbers of rows and
columns increase). The airline crew scheduling problems tested in this chapter are small
so that we can obtain reasonable numbers of consecutive ones segments. Consequently,
we can isolate the structure we seek using real-world data, and actually solve the SPPs
with the row split Benders decomposition. The samples in Table N.2 are even smaller
than those in Tables III.2 and III.3, where we merely seek a good lower bound that can be
computed with less effort than an LP relaxation of (SPP).
Here, we either attempt to solve the original integer programming problem to
optimality or to obtain a feasible solution for it, using our new algorithm. In either case,
the problems we try to solve are NP-Complete. Our computational experience shows that
the convergence speed of the new algorithm decreases as the number of consecutive ones
segments increases. Hence, to obtain modest numbers of consecutive ones segments, and
accordingly to allow the size of the binary Benders relaxation problem to be
computationally tractable, we choose smaller size airline crew scheduling problems in
this chapter than the samples tested in Chapter III.
Given the existing column order, a 2-0PT TSP heuristic is used to minimize the
number of segments of consecutive ones for each sample problem. Table IV.2 lists the
61

number of consecutive ones segments before and after column reordering, as well as the
time to implement the 2-0PT heuristic.
Ratio: Ratio: Data Cols Rows OrgSegs ReordSegs OrgSegs/Cols ReordSegs/Cols %DecSegs ReordTime
SPPNW08 435 24 493 258 1.13 0.59 48 2.04
SPPNW23 711 19 552 272 0.78 0.38 51 9.66
SPPNW26 771 23 611 359 0.79 0.47 41 .9.33
SPPNW28 1,210 18 971 538 0.80 0.44 45 42.00
SPPNW40 405 19 524 248 1.29 0.61 53 2.42
SPPNW41 198 17 229 122 1.16 0.62 47 0.22
Table IV.2. Comparison of the Number of Consecutive ones segments before and after Column Reordering. From left to right, Cols, Rows, OrgSegs, and ReordSegs
refer to the numbers of columns, rows, and consecutive ones segments before and after
column reordering, respectively. %DecSegs denotes the percent decrease in the number
of consecutive ones segments after column reordering. Reordtime is the time to
implement the 2-0PT column-reordering heuristic. All times in the table are in 650Mhz
Pentium III seconds. The column reordering is implemented using Compaq Visual
Fortran [1999].
By reordering the columns of each sample problem using a 2-0PT TSP heuristic,
we obtain a 48% average decrease in the number of segments of consecutive ones.
Next, we investigate the performance of the new algorithm in generating feasible
solutions for an SPP. Table IV.3 lists the solution times and the upper bound values
obtained using the row split Benders decomposition algorithm before and after reordering
the columns for each example in Table IV.2.
62

Data IPObj IPTime () 8 Benders Decomposition
Iters I 25 50 75 89 96 150
TimeBe 0.3 78.4 189.5 372.6 471.7 528.0 1,112.0
SPPNW08 35,894 1.21 0.5 0.25 TimeAf 0.2 44.5 103.7 187.5 267.8 310.4
UBBe 12,276,342 5,337,328 3,657,892 2,345,726 934,587 934,587 899,452
UBAf 7,227,440 3,623,764 1,345,687 957,484 75,394 38,613
Iters 1 25 so 75 100 Ill 150
TimeBe 0.4 90.2 183.5 412.4 603.5 720.4 1,321.0
SPPNW23 12,534 0.71 0.6 0.30 TimeAf 0.3 49.9 123.3 201.1 324.2 342.6
UBBe 10,331,450 7,455,872 5,385,912 3,713,900 3,333,562 3,087,375 1,004,562
UBAf 9,173,058 6,386,058 3,767,935 1,528,487 856,840 14,583
lters I 25 50 75 100 125 150
TimeBe 0.2 100.3 199.4 476.5 631.3 1,087.0 1,434.0
SPPNW26 6,796 0.44 0.6 0.35 TimeAf 0.1 76.4 143.5 289.4 403.1 634.7 923.6
UBBe 11,325,755 6,325,207 3,655,376 3,212,098 3,080,354 1,354,730 999,423
UBAf 8,436,754 6,234,967 2,561,376 2,222,435 1,452,789 934,562 843,295
Iters I 25 50 75 100 125 150
TimeBe 0.5 145.6 254.9 612.67 739.7 1,345 1,860
SPPNW28 8,298 0.51 0.8 0.40 TimeAf 0.4 103.3 194 439.5 625.7 738 1,406
UBBe 7,455,127 6,513,538 6,004,577 4,987,002 3,056,276 2,377,553 1,235,740
UBAf 8,345,265 6,345,850 5,349,012 4,333,587 3,265,290 1,458,873 634,547
Iters I 25 50 75 84 92 150
TimeBe 0.3 87.4 198.3 390.6 493.2 538.1 1,243
SPPNW40 10,809 0.30 0.5 0.25 TimeAf 0.1 39.5 94.6 169.5 241.3 294.1
UBBe 10,343,566 6,341,846 4,234,745 3,100,328 1,349,162 1,000,237 763,310
UBAf 5,435,767 2,546,854 1,875,045 878,098 53,234 14,207
Iters 1 23 26 28 30 34 84
TimeBe 0.03 36.46 41.925 45.912 48.9 56.7 206.3
SPPNW41 11,307 0.25 0.4 0.10 TimeAf 0.006 6.6 7.65 8.41 9.21 10.89
UBBe 8,107,710 2,715,820 1,821,430 1,816,550 1,816,550 1,816,550 12,990
UBAf 4,515,555 30,039 26,235 16,803 12,870 11,307
Table IV.3. Comparison of the Solution Times and Upper Bound Values Obtained Using the Row split Benders Decomposition before and after Column Reordering for each SPP Sample. IPObj is the optimal objective value of the original SP problem.
IPTime is the time to solve the original SP problem. () and 8 refer to the optimality and
integrality tolerance parameters for Benders relaxation (RSREL ), respectively. Iters
denotes the number of Benders iterations. TimeBe and TimeAf refer to the times before
and after column ordering, respectively. UBBe and UBAf refer to the upper bound values
obtained using the new algorithm before and after column reordering, respectively. All
times in the table are in 650Mhz Pentium ill seconds.
63

Observe that when the number of consecutive ones segments is more than about
300, the row split Benders decomposition converges slowly for the airline crew
scheduling samples in Table IV.2. Experiments with other airline crew scheduling
problems from OR-Library [2000] behave similarly, and are not reported here.
As the number of cuts increases the time to solve the binary Benders relaxation
increases significantly. For each of the airline crew scheduling samples, in order to
obtain feasible solutions faster, we apply some heuristics (e.g., (i) during the initial
iterations solve the LP relaxation of (RSREL), (ii) keep no more thank cuts in (RSREL)
by eliminating the cuts having zero dual price for some number of iterations, (iii) increase
the optimality tolerance (),or the integrality tolerance 8 ).
After reordering the columns, the solution times and the upper bound values
obtained using the new algorithm improve an average of 63% and 61%, respectively.
Next, we relax each SPP listed in Table IV.2 to obtain an SC sample problem. By
using each sample problem, we investigate the performance of the row split Benders
decomposition algorithm in generating improved feasible solutions for an SC problem.
Table IV.4 lists the solution times and the upper bound values obtained using the new
algorithm before and after reordering the columns for each example in Table IV.2.
64

Data IPObj IPTime () Benders Decomposition
lters I 2 3 5 10 15 20 35 38 83
TimeBe 0.01 0.05 0.10 0.21 0.76 1.43 2.30 10.85 12.79 76.23
SPPNW08 7,758 0.11 0.2 TimeAf 0.01 0.05 0.07 0.27 0.63 1.11 1.79 4.59 5.24
UBBe 275,346 275,346 193,528 62,038 20,220 16,354 16,354 14,336 13,480 8,318
UBAf 248,150 60,908 51,440 25,120 19,660 13,462 10,552 9,458 8,154
lters I 2 3 5 10 16 18 45 47 86
TimeBe 0.02 0.06 0.10 0.21 1.72 5.42 5.87 48.10 61.78 318.30
SPPNW23 10,062 0.15 0.2 TimeAf 0.02 0.06 0.09 0.16 1.05 2.55 2.79 11.66 12.10
UBBe 549,614 529,712 183,504 118,916 56,034 46,682 36,696 23,300 23,198 11,088
UBAf 228,732 168,430 72,002 38,236 17,032 15,644 13,538 11,810 11,298
Iters I 2 3 5 10 16 27 56 73 93
Time Be 0.02 O.o7 0.12 0.30 1.64 6.03 16.48 52.53 83.67 137.00
SPPNW26 6,458 0.20 0.3 TimeAf 0.03 0.06 0.10 0.18 0.86 2.12 4.54 18.99 38.07
UBBe 759,040 361,338 141,336 33,824 33,824 29,012 27,054 18,686 18,028 7,560
UBAf 285,438 118,244 54,732 24,252 18,974 16,130 10,486 9,300 7,954
lters I 2 3 5 10 25 65 80 87 113
TimeBe 0,02 O.Q7 0.18 0.38 1.12 23.25 313.80 518.40 580.74 1,196.00
SPPNW28 7,092 0.70 0.3 TimeAf 0,02 O.Q7 0.12 0.25 0.92 5.25 46.47 83.78 106.62
UBBe 349,506 349,506 349,506 349,506 55,215 27,366 25,341 12,477 12,477 7,239
UBAf 551,751 347,844 303,552 74,256 25,005 13,956 12,240 9,744 8,892
lters I 2 5 10 15 20 30 35 40 94
TimeBe 0,02 0.06 0.20 3.38 12.02 16.55 22.26 25.42 28.31 133.40
SPPNW40 10,701 0.16 0.3 TimeAf 0.01 0.01 0.13 1.74 2.16 2.75 4.89 6.33 7.77
UBBe 758,211 438,939 107,748 39,582 37,044 31,815 29,529 29,529 26,853 13,275
UBAf 357,525 119,706 63,558 28,356 18,723 18,723 18,723 15,827 13,116
lters I 2 5 7 10 13 15 18 19 39
TimeBe O.Q3 0.01 0.11 0.52 2.68 7.85 9.32 23.84 30.75 78.54
SPPNW41 10,539 0.12 0.1 TimeAf 0.00 0.02 0.16 0.35 0.73 1.20 2.26 3.04 4.36
UBBe 400,464 184,668 51,672 42,528 31,614 19,035 26,178 19,035 19,035 10,539
UBAf 177,720 56,592 37,728 30,903 25,050 15,816 15,816 15,816 10,539
Table IV.4. Comparison of the Solution Times and Improved Feasible Solutions Obtained Using the Row split Benders Decomposition before and after Column Reordering for each SC Sample. IPObj is the optimal objective value of the original SC problem. IPTime is the time to solve the original SC problem. B refers to the optimality tolerance for Benders relaxation, (RELSC). The integrality tolerance 8 is set to the CPLEX 6.6 [ILOG 2000] default value (l.Oe-5). Iters denotes the number of Benders iterations. TimeBe and TimeAf refer to the times before and after column ordering, respectively. UBBe and UBAf refer to the upper bound values obtained using the new algorithm before and after column reordering, respectively. All times in the table are in 650Mhz Pentium III seconds
65

By reordering the columns of each sample problem, the number of Benders
iterations required to obtain a feasible solution within a required optimality tolerance B
decreases an average of 42%. Furthermore, the solution times improve an average of
90%.
We also use the SPPs listed in Table IV.2 to obtain SP sample problems. By
using each sample problem, we investigate the performance of the row split Benders
decomposition algorithm in generating improved feasible solutions for an SP problem.
Table IV.5 lists the solution times and the lower bound values obtained using the new
algorithm before and after reordering the columns for each SP example.
66

Data !PObj IPTime () Benders Decomposition
lters I 2 3 4 5 6 8
TimeBe O.o3 0.04 0.08 0.!1 0.14 0.16
SPPNW08 174,793 0.26 0.05 TimeAf 0.05 O.D7 0.09 0.12 0.15 0.!7 0.24
LBBe 28,426 28,426 28,426 28,426 28,426 173,872
LBAf 34,614 34,614 34,614 34,614 34,614 34,614 173,330
lters I 24 35 40 50 60 94
Time Be 0.03 5.86 15.59 17.59 25.33 32.91
SPPNW23 28,644 0.67 0.20 TimeAf 0.03 2.95 10.61 14.26 21.86 58.15 199.70
LBBe 4,778 19,080 22,628 24,256 24,256 28,360
LBAf !0,158 13,338 16,052 18,200 19,190 21,186 28,464
Iters I 6 40 45 62 83 114
Time Be 0.04 0.31 I 1.01 15.49 25.65 45.32 121.54
SPPNW26 28,560 0.31 0.20 TimeAf 0.05 0.27 6.59 7.69 14.61 37.22
LBBe 3,926 3,926 10,578 10,578 18,792 22,572 23,124
LBAf 9,162 11,138 14,890 20,120 24,006 24,214
lters I 33 35 39 45 56 85
TimeBe 0.03 14.66 17.38 20.69 23.35 32.23 73.!5
SPPNW28 30,744 0.45 0.30 TimeAf 0.08 5.11 5.53 6.78 8.97 12.37
LBBe 7,593 12,351 12,351 17,589 17,589 20,169 28,122
LBAf 11,403 20,589 20,820 22,092 24,018 28,110
Iters 1 9 23 26 29 32 73
Time Be O.Dl 0.46 15.67 20.36 20.10 21.66 42.90
SPPNW40 34,137 0.17 0.10 TimeAf 0.01 0.41 2.16 2.87 3.21 4.77
LBBe 6,900 11,298 11,298 16,035 16,035 16,287 32,064
LBAf 5,265 15,462 25,890 25,890 25,890 32,679
lters I 9 23 26 29 32 73
TimeBe 0.01 0.46 15.67 20.36 20.99 21.66 42.90
SPPNW41 37,845 0.10 0.05 TimeAf 0.01 0.41 2.16 2.87 3.21 4.77
LBBe 6,900 11,298 11,298 16,035 16,035 16,287 32,064
LBAf 5,265 15,462 . 25,890 25,890 25,890 32,679
Table IV.5. Comparison of the Solution Times and Improved Feasible Solutions Obtained Using the Row split Benders Decomposition before and after Column Reordering for each SP Sample. IPObj is the optimal objective value of the original SP problem. IPTime is the time to solve the original SP problem. () refers to the optimality tolerance for Benders relaxation, (RELSP). The integrality tolerance o is set to the CPLEX 6.6 [ILOG 2000] default value (l.Oe-5). Iters denotes the number of Benders iterations. TimeBe and TimeAf refer to the times before and after column ordering, respectively. LBBe and LBAf refer to the lower bound values obtained using the new algorithm before and after column reordering, respectively. All times in the table are in 650Mhz Pentium III seconds.
67

After column reordering, the numbers ofBenders iterations and the times required
to obtain feasible solutions within an optimality gap B improve an average of 43% and
82%, respectively, for SPPNW26, SPPNW28, SPPNW40, and SPPNW41. However, for
SPPNW08 and SPPNW23, the numbers of iterations and the solution times increase an
average of31% and 58%, respectively.
For SPPNW08, the row split Benders decomposition raises the lower bound
(hence, generating a feasible solution) within 5% of the optimal solution faster than
solving the seminal SP problem using CPLEX 6.6 [ILOG 1999].
In general, our computational results show that the convergence rate of the new
algorithm is inversely proportional to the number of consecutive ones segments. That is,
the efficiency decreases as the number of ones segments increases.
The airline crew scheduling problems tested here are small. However, the ratio of
the number of segments to the number of columns is relatively high. Because the size of
each sample problem is small, the . seminal SP, SC, or SPP can be solved in a short
amount of time.
On the other hand, the size of the binary Benders relaxation problem, and hence
the convergence rate of the new algorithm is more dependent to the number of
consecutive ones segments than on the size of the original SP, SC, or SPP. When we
reorder the columns of each sample problem using a 2-0PT heuristic, the size of the
sample does not change, but we reduce the number of consecutive ones segments.
Moreover, in general, when we reduce the number of consecutive ones segments for each
sample problem, the new algorithm converges faster.
68

We conjecture that a large SC, SP or SPP with a modest number of consecutive
ones segments can be solved faster with the row split Benders decomposition than by
conventional means.
The row splitting technique is implemented using Compaq Visual Fortran [1999],
and Benders decomposition is implemented using the AMPL Plus 1.6 [Fourer et al. 1999]
mathematical programming language and the CPLEX 6.6 [ILOG 2000].
Execution of an indirect solution method such as Benders decomposition is not
nearly as fast or efficient in a mathematical modeling language such as AMPL as it is in a
specialized, purpose-built code (e.g., [Brown et al. 1987b]). That is, solution times
obtained using the new algorithm could be improved by implementing Benders
decomposition using a specialized code.
69

THIS PAGE INTENTIONALLY LEFT BLANK
70

V. REDUCTIONS IN SPP
Problem size reduction is essential for efficient solution of SPPs. Preprocessing
finds "embedded special structure that can give significant insight to the model proponent
as well as greatly reduce solution effort." [Brown et al. 1980]
In this chapter, we first present reduction operations established in the literature
for SPPs. Then, we introduce other reductions suggested by the network with side
constraints reformulation of SPP, using the column splitting technique. Next, we show
the relationship between these network reductions and the known SPP reductions. While
doing this, we discover a new reduction in the column split reformulation than has an
equivalent in SPP that is new to the literature. Applying this column split reduction to a
well-studied set of airline crew scheduling SPPs, we identify relations between binary
variables that lead to fixing many more of them than any preceding work. We also
discuss a variable probing method (i.e., tentatively setting the variable to one of its
bounds and observing the implications of this setting) for SPP that can be used to tighten
the LP relaxation lower bound, or reduce the problem size during B&B.
A. KNOWN REDUCTION OPERATIONS
We will begin with technical definitions used to describe reduction operations.
Consider the integer programming formulation (SPP) introduced in Chapter I. Fixing a
variable xj to zero means that the variable, its objective function coefficient cj, and the
corresponding column j are permanently removed from the problem formulation.
Removing a row i means eliminating that row from the problem matrix along with the
71

corresponding right-hand side entry, and fixing any variable to zero whose resulting
column now has only zero entries. Fixing a variable xj to one means that all its incident
rows are satisfied and can be removed. Moreover, all other columns incident with any of
these rows can be fixed to zero.
Sometimes columns are merged during reduction, which means that the
(orthogonal) columns of two variables are combined into one column, and the two
original columns are deleted from the formulation. The objective function coefficient of
the merged variable is the sum ofthe two original objective function coefficients.
In the following subsections we describe the published reduction methods (e.g.,
[Balas and Padberg 1976], and [Hoffman and Padberg 1993]).
1. Duplicate Columns
If two columns are identical, then the column with the larger cost coefficient can
be removed from the problem.
• Aj = Ak for some j,k eN such that j * k =>
If cj > ck , then xj is fixed to zero, else xk is fixed to zero.
Duplicate columns do arise especially in large-scale SPPs. For instance, in the
airline crew scheduling problem, because the number of feasible rotations is
astronomically large, a very large number of pairings is generated according to an
appropriate heuristic sieve. Because the process of generating such problems is both
random and heuristic, the same column may be generated more than once.
72

2. A Column Is Equal To The Sum Of Other Columns
If the sum of a subset of columns in the formulation is equal to a single column,
and the total cost of the columns in the sum is smaller than the cost of the single column,
then this column can be removed from the problem.
• A1 = .l:Ak and c1 ~ .Lck for some j EN and K s;;;; N\{j} :::::> keK keK
x1 is fixed to 0.
3. Dominated Rows
If a row in (SPP) properly contains another row, then the longer row (i.e., the row
with more non-zero entries) can be removed from the problem along with the variables
that have non-zero coefficients in the longer row but not in the shorter row. Let N;
( s;;;; N) be the set of column indices that have non-zero entries in row i (i.e.,
N; = {j E N I aij = 1} ).
• N; c N1 for some i,l EM and i ;:f:./ :::::>
x1
is fixed to 0 V j E (N1 \N;), row I is removed.
4. Two Rows Differ By Two Entries
If two rows are identical except for two entries, then the two columns
corresponding to these entries can either be removed from the formulation (if they are
non-orthogonal) or merged into one column (if they are orthogonal). In either case, the
two rows will be identical after the variable reductions. Thus, one of the rows can be
removed from the formulation.
73

If A/ Ak :;;:: 1 then xj, xk are both fixed to zero, else xj and xk are merged. One
of the rows is removed in each case.
5. Singleton Row
If a row has exactly one non-zero entry, then the variable corresponding to this
entry can be fixed to one.
• aij =1 forj eN, and a;k = 0 "i/k e N\{j} for some i eM=>
xj is fixed to 1.
6. Clique Reduction
Let GA = (N,IE) be an intersection graph associated with the incidence matrix A.
The intersection graph GA is obtained as follows.
We define a node j eN= {1,2, ... ,n} for each column Aj of A, and join two
nodes i::;: j eN by an edge (i,j) e IE if the columns A; and Aj of A have at least one
entry equal to + 1 in common in some row of A (i.e., if A; and Aj are non-orthogonal).
Example V.1 illustrates the intersection graph for a 0-1 matrix, A.
Example V.l: Consider the following 0-1 matrix.
1 0 0 0 0 1
1 0 0 0 0 0
0 1 0 0 1 1 A=
0 0 1 1 1 0
1 0 0 1 0 1
1 1 0 0 0 1
74

Figure V .I depicts the intersection graph of matrix A.
Figure V.l Intersection Graph GA for Sample Matrix A. The nodes of GA
correspond to the columns of matrix A. There exists an arc between two nodes if the
corresponding column vectors are non-orthogonal.
For every feasible solution x of (SPP) .there corresponds a disjoint node set
S = {i E .NI xj =I} in GA. No two nodes of S are joined by an edge of GA, otherwise x
is not a feasible solution.
A clique is a set of nodes with the property that every pair of nodes in the set is
connected by an edge. Then, if Cis a clique in the intersection graph GA, 'Lxj :=:::;I is a jeC
valid inequality for (SPP). That is, this inequality constraint is satisfied by all integer
solutions to (SPP). For instance, in Example V.I, nodes I, 2, and 6 form a clique and
is a valid inequality for the associated SPP.
If a column with no intersection in row i is non-orthogonal to all the columns that
have a non-zero entry in row i, then the variable corresponding to this column can be
fixed to zero. In terms of the intersection graph, a node extending a row clique (i.e., the
75

clique formed by the nodes associated with the non-zero entries in a row of SPP) can be
removed.
• Clique Reduction:
Let kEN be any column. Aj · Ak ;;::: 1 V j EN;, for some i eM=:;.
xk is fixed to zero.
Finding a clique of a given size in some graph G is an NP-complete problem (e.g.,
[Parker and Rardin 1988, pg. 35]). However, given the definition above, finding clique
reductions in an SPP is polynomial in the input size of the SPP. Given row i in SPP and
the corresponding node set N; , it is not difficult to determine the existence of a clique C
that properly contains N; . One simply scans all columns of A and distinguishes those
that are non-orthogonal to all columns in N; . Either this set is empty and a next row is
selected, or variables that can be fixed to zero are detected.
The worst-case complexity of finding clique reductions in an SPP is O(m x n x /),
where m is the number of constraints, n is the number of columns, and l is the number
of non-zero entries in matrix A. For each non-zero entry j in row i (i.e., j E N; ), we
scan all columns to distinguish those that are non-orthogonal to column j. In the worst
case, this operation is done for each row i, adding up to ( n x l) comparisons. The worst
case complexity of comparing two columns to detect whether they are non-orthogonal is
O(m). Thus, the overall worst-case complexity is O(mx nxl).
Clique reduction is used as a part of the column split reduction that is introduced
in Section V.D.
76

Figure V.2 illustrates the reductions described in this section.
(c) Duplicate columns} and k
J
(c) Row i dominates row /, and columnsjeJ are fixed to 0
j ,----
1
1- -I
(e) Singleton Row
+
(b) Column} is equal to and dominated by the sum of other columns
::~ ~oo~~: ~: (d) Rows i and l differ by two entries in columns j and k
j r-- - -
I - 1
- - -1- I - 1 - - - -I
- 1 1
- - --'---- - -
(f) Clique Reduction
Figure V.2. SPP Reduction Rules. In Figure (a), columns} and k are the same. Column j has a higher cost. Thus, xj is fixed to zero. In Figure (b), column} is equal to the sum of
columns k1 and k2 • The cost coefficient of column j is greater than the sum of the cost
coefficients of k1 and k2 • Hence, xk is fixed to zero. In Figure (c), row i is a proper subset
of row l. The variables that have non-zero coefficients in row l, but not in row i, are fixed to zero. In Figure (d), rows i and l share all the coefficients except the ones in columns} and k. Thus, xj = xk. In Figure (e), row i has exactly one non-zero entry at column j.
Hence, xj is fixed to one, and all incident rows are removed. In Figure (f), column j is
non-orthogonal to all the columns that have non-zero entries in row i . Consequently, xj is
fixed to zero.
77

B. CORRESPONDENCE OF SPP REDUCTIONS IN REFORMULATIONS
In this section, we convert SPP to its equivalent network with side constraint (NS)
form, and then look for reductions in the network constraints :NY = b . Any such
reduction should be equivalent to a known reduction for SPP, or suggest a new one.
Consider the reformulation of SPP given by (NS),
minimize d 'y
(NS) s.t. j{y=b
Sy=O
y binary.
:N is the node-arc incidence matrix of a network with one more row than SPP. The
right-hand side vector b has + 1 as its first entry, is followed by zeros, and -1 as the last
entry. An arc in the network whose incident nodes are given by (f./ ,tJ) represents each
variable yJ . That is, arc yJ is incident from node f./ to node tJ . Notice that, a1\ . = 1 1 J
and a: . = -1 where a1k k • and a: . are the non-zero coefficients of the variable y1~ • (For
lj] jl lj]
ease of exposition, each element of the set of arcs is denoted by the corresponding
variable.) The set of arcs incident to node i is denoted by
and the set of arcs incident from node i is denoted by
78

There is no arc from the last node ( i = m + 1 ) to the first node (i = 1). Thus, all
entries at the first row of matrix :N are non-negative, and all entries at the last row are
non-positive. That is, X:={}, and (fm+~ = {}.
Observe that the variable yJ is obtained from the variable xj in the original SPP.
Variable yJ has a + 1 coefficient at row If , and a -1 coefficient at row tJ . This implies
that the variable xj has consecutive ones coefficients between the rows If and (tJ -1) in
the original SPP (i.e., a1k = a1k+1, ••• ,= al-z = al_1 = 1). ) J ) j
Using the node-arc set notation of matrix :N, the constraints of (SPP) can be
written as follows.
Let Yi = {yJ Iff< i < tJ ,j E N,k E {1, ... ,1Kjl}} for some row i in :N. Let
Rows (i -1) and i of the original SPP associated with some row i of :N can be
expressed, respectively, as follows:
(i -1) (V.l.a)
(i) (V.l.b)
79

Set J; indicates the columns of (SPP) which have non-zero entries both at row
i and i -1. Set f' indicates the columns that have non-zero entries at row 1
i, but not at row i -l . Set J;"' indicates the columns that have non-zero entries at row
i -l, but not at row i .
Example V.2 illustrates the sets defined in this section, and shows the
relationships between the matrix A of (SPP) and matrix :N of (NS).
Example V.2: Consider the following SPP.
minimize c'x
s.t.
1 0 0 1 1 0 0 1 1 1 0 1 1 0 0 1
1 1 1 1 0 0 0 1 1 0 0 1 1 1 1 1
1 1 1 1 0 1 1 0 1 1 0 1 1 1 1 X = 1
1 1 0 0 0 1 1 0 1 0 1 0 1 1 0 1
1 0 0 0 0 1 0 1 0 1 1 0 0 0 0 1
x binary
First, add a redundant last row 0 · x = 0 to the set of constraints. Then, perform the
following elementary row operation for each i = 5, 4, 3, 2,1 , in the stated order: Subtract
the ith constraint from the (i + 1) th constraint. These operations create the following
problem:
80

minimize c'x
s.t.
* * 1 0 0 1 1 0 0 1 1 1 0 1 1 0 0 1
0 1 1 0 -1 0 0 0 0 -1 0 0 0 1 1 0
0 0 0 0 0 1 1 -1 0 1 0 0 0 0 0 X 0 =
0 0 0 0 0 0 0 0 0 -1 1 -1 0 0 -1 0
0 0 -1 -1 0 0 -1 1 -1 1 0 0 -1 -1 0 0
-1 -1 0 0 0 -1 0 -1 0 -1 -1 0 0 0 0 -1
x binary
The constraint coefficient matrix of the above formulation has exactly one + 1 and
one -1 in each column, except the distinguished columns eight and ten. When we split
these columns to obtain the reformulation (NS), variable x8 will be replaced with the
variables Y! andy~, and variable x10 will be replaced with the variables y;0 ,y120 , and Yio.
For all other columns, we will simply substitute xj with y).
For the third row of matrix (NS), we have the following node-arc sets:
J; = {1,2,3,4,9,12,13,14,15}, J; = {6, 7,10}, and J3,, = {8}.
Observe that substituting these sets in equations (V.l.a) and (V.l.b), we obtain the
second and third constraints of the given SPP.
The reduction procedures discussed in this section are based on network
feasibility and variable conflicts that become apparent with flow conditions m the
network with side constraints model, (NS).
81

If the variable y~ is fixed to either zero or one using a network reduction rule,
then each variable Y5 can also be fixed to the same value for all k E {1, ... ,jKjj} \!. This is
true because Y5 is required to satisfy
Y5 = Y5+\ k = 1, ... ,jKjj-1, for each j E r,
by the side constraints Sy = 0. Furthermore, the variable xj in the original SPP can also
be fixed to the same value by Proposition 11.1.
Next, we present the reduction rules observed in the reformulated problem, (NS).
We also explore the relationships between these reductions and those that are presented in
the previous section. That is, we want to know whether the reformulation model yields
any different reductions in the original problem that are not detected by the known
reduction rules.
1. Singleton Transshipment Row
If a transshipment row i (i.e., bi = 0) of W has exactly one non-zero entry, then
the variable corresponding to this entry can be fixed to the absolute value of the right
hand side coefficient.
Reduction: For a node i with ltTtl = 1 and lx;l = 0, or ltTtl = 0 and lx;l = 1, y~ is fixed to
lbi I where y~ is the unique arc in J; or x; .
Relationship with known reductions: Let i be a singleton transshipment row such that
ltTtl = 1, lx;l = 0, and y~ is the unique arc in J;. Using the above reduction rule, y~ can
be fixed to bi, and accordingly, xj can also be fixed to bi.
82

The network row i corresponds to the rows (i -1) and i in SPP. As described
earlier, the rows (i -1) and i of SPP can be written as follows:
For our case (where IJ:I = 1, I~ I= 0, and y~ is the unique arc in J; ), J;" = {j}
and J/" = {}. Consequently, the rows (i -1) and i appear in SPP formulation as follows:
""x~ ~} ;eJ,
=1 (i -1)
LX; +xi= 1 (i) }eJ;
Now, we investigate whether or not we can still obtain the same reduction (i.e., x1
can still be fixed to bi) after implementing the known reduction rules on these two rows.
For i = 1, both the first row in (NS) and SPP are singletons, and they yield the
same reduction. For 2::::; i::::; m, constraints (i -1) and i share all variables but xi. Thus,
using the row dominance reduction rule, xi can be fixed to zero (=bi ).
Similar arguments hold for the case where IJ: I = 0 and ~~I = 1.
We therefore conclude that the outcome of this network reduction corresponds to
a known SPP reduction.
83

2. A Transshipment Row Has All + 1 Or All-1 Entries
If a transshipment row i has all + 1 or all -1 entries, then the variables
corresponding to these entries can be fixed to zero.
Reduction: For a transshipment node i, if IJ; I;::: 1 and l:r; I = 0, or l:r; I;::: 1 and IJ: I= 0,
then variables yJ can be fixed to zero for all}, k such that yJ E J; or yJ E _x;.
Relationship with known reductions: Let IJ: I;::: 1 and l:r; I= 0. The rows (i -1) and i
of (SPP) associated with row i of (NS) can be written as follows:
=1 (i -1)
l:x1+ l:xj =1 (i) }eJ; jeJ:
Row (i -1) dominates row i. Using the "dominated rows" reduction rule,
variables xj can be fixed to zero for j E J;". Observe that the network reduction rule
presented in this section also yields the same reduction operations in (SPP).
Similar arguments hold for the case where IJ: I = 0 and l:r; I ;::: 1 .
3. A Transshipment Row Has Exactly One + 1 And One -1 Entry
If a transshipment row i has exactly one + 1 and one -1 entry, then the two
columns associated with these entries can either be removed from the formulation (if the
corresponding variables in SPP are non-orthogonal) or merged into one column (if they
are orthogonal).
84

Observe that this reduction rule and the "two rows differ by two entries" reduction
rule (presented in Section V.A.4) are identical in the sense that they yield the same
reductions in the original (SPP) formulation.
Reduction: For a transshipment node i, if IJ;I = 1 and IX: I= 1, then yJ = yJ where
k d k Y; an Yj are merged. In either case, the transshipment row i can be removed from the
formulation (NS).
4. A Transshipment Row In (NS) Is Dominated By A Row In (SPP)
For a transshipment node i in :N and some row i in (SPP), if (J;" UJ/") ~ N1 ,
then yJ can be fixed to zero for all}, k such that yJ e (J; U .1;). (Remember that N1 is
the set of column indices that have non-zero entries in row i ).
Justification: Constraints (i -1) and i of (SPP) associated with the transshipment row i
can be written as follows:
.Lxj + .Lxj =1 (i-1) jeJ; jeJ;
.Lxj + Ixj =1 (i). jeJ; jeJ7
Let i be some row in (SPP) such that (J/' UJ/") ~ N1 • Row i is given by:
85

Columns j E (J' U J" U J'") are non-orthogonal and their intersection graph forms a
clique. Thus, the following constraint is a valid inequality for (SPP).
L xj + L xj + L xj ~ 1 . jeJ; jeJ; jeJ"
Both constraints (i -1) and i dominate this valid inequality. Using the "dominated
rows" reduction rule, variables xj can be fixed to zero for j E (J" U J'") . Consequently,
by Proposition ll.1, the associated variables Y5 of (NS) can also be fixed to zero for all
Example V.3:
Consider the following three constraints taken from an SPP.
xi +xz +x6 +x7 +Xg +x9 = 1
xi +xz +x3 +x4 +Xs +x6 = 1
+x3 +x4 +Xs +x7 +Xg +x9 +xio Xn = 1
Subtracting (i) from (ii), we obtain the following transshipment row:
Now, consider constraints (ii') and (iii) together.
+x3 +x4 +xs
+x3 +x4 +xs
= 0
(i)
(ii)
(iii)
(ii')
(ii')
(iii)
variable is equal to one. If one of x3, x4, x5, x7, x8 , or x9 is equal to one, then another of
these variables with an opposite sign must also be equal to one to satisfy constraint (ii')
86

(e.g., if x3 = 1, then one of x7 , x8 , or x9 must also be equal to one). This is, however, not
The same reduction can also be obtained by applying a combination of clique and
row dominance reduction rules on the three SPP constraints.
The columns 1, ... ,9 are non-orthogonal and their intersection graph forms a
clique. Thus, the following equation is a valid inequality for this SPP.
x1 +x2 +x3 +x4 +x5 +x6 +x7 +x8 +x9 :::; 1 (iv)
Constraint (i) dominates constraint (iv), and they share all variables except
x3,x4 ,x5 • Therefore, these variables can be fixed to zero. Constraint (ii) also dominates
constraint (iv) and they share all variables except x7 ,x8 , and x9 • Hence, x7 ,x8 , and x9
can also be fixed to zero.
5. Clique Dominance
For a transshipment node i of matrix JV and for some row i of (SPP), if
N1 ~ (J;" U ];'") and (J;" U J;"') \ Nt ~ J;", then variables xj can be fixed to zero for all
j E(J;" nN,). Or, if N, ~ (J;" UJ;'") and (J;" UJ;"')\N, ~ J;"'' then variables xj can be
fixed to zero for all j E (J/' n N,) . Consequently, the variables y; in (NS), associated
with xj, can also be fixed to zero for all k = 1, ... , JKj J.
Justification: Constraints (i -1) and i of (SPP) associated with the transshipment row i
can be written as follows:
87

I xj +I xj = 1 (i -1) jeJ,' jeJ,"
I xj +I xj = 1 (i) . jeJ,' jeJ;
Let i be some row in (SP P) such that N1 ~ (J;" U J/") and (J;" U J; m) \ Ni ~ J/'. Row i
is given by:
L xj + L xj = 1 (f). jeJ,~ je(J,· nNi)
Columns j E (J/ u u/' n N;) u l") are non-orthogonal and their intersection graph forms
a clique. Thus, the following constraint is a valid inequality for (SPP).
I xj +I xj + I xj s; 1 . jeJ,' jeJ,• je(J/ nNi)
The valid inequality is dominated by the constraint (i -1). Using the "dominated rows"
reduction rule, variables xj can be fixed to zero for j E (J;" n N;) . Consequently, by
Proposition TI.1, the associated variables yJ of (NS) can also be fixed to zero for all
After this reduction, the constraints (i -1) and i become identical, and one of
them can be removed from the formulation (SPP).
Example V.4:
Consider the following three constraints taken from an SPP.
XI +Xz +x6 +x7 +Xg +x9 = 1 (i)
XI +Xz +x3 +x4 +xs +x6 = 1 (ii)
+xs +x7 +Xg +x9 = 1 (iii)
88

Subtracting (i) from (ii), we obtain the following transshipment row.
Now, consider constraints (ii') and (iii) together.
-x7 -x8 -x9 = 0
+x7 +x8 +x9 = 1
(ii')
(ii')
(iii)
If x5 is equalto one, then one of the variables x7 ,x8 , andx9 must also be equal to
one to sat~sfy constraint (ii') . This is, however, not feasible for constraint (iii) . Thus, x5
is fixed to zero.
The same reduction can also be obtained by applying a combination of clique and
row dominance reduction rules to the three SPP constraints.
The columns 1,2,5,6,7,8, and 9 are non-orthogonal and their intersection graph
forms a clique. Thus, the following equation is a valid inequality for this SPP.
(iv)
Constraint (i) dominates constraint (iv) and they share all variables except x5 •
Therefore, x5 can be fixed to zero.
Figure V .3 illustrates the reductions described in this section.
89

~ _!_ - - - -- - - -- - - -
II- - - +1 - - -I= 0 i I - +1 - +1 - +1 -I = 0
- -1 - --1 - -1 -- -1
- - '--- _..::,_
(a) Singleton transshipment row i (b) Transshipment row i has all
k + 1 entries in columns}, k, and l
-- +1
- - i k l r s
- - i I - -1 -1 - +1 +1 - I = 0
II- +1 - - - -1 -I= 0
- -- - i I +1 +1 +1 - +1 +1 - I = 1
-1 - '---
(c) Transshipment row i has exactly one (d) Transshipment row i in (NS) + 1 in column j and one -1 in column k is dominated by row i in(SPP)
i k l r s t i I +1 +1 +1 - -1 -1 -1 I = 0
i 1- - +1 - +1 +1 +1/ = 1
(e) Clique dominance reduction resulting
from row i in (NS) and row l in (SPP)
Figure V.3. Network Reduction Rules. In Figure (a), row i has exactly one non-zero entry at column j. Hence, xi is fixed to zero. In Figure (b), row i has all + 1 entries at
columns J,k, and l. Thus, xj,xk, andx, are fixed to zero. In Figure (c), row i has exactly
one + 1 entry at column J, and one -1 entry at column k . Hence, xi = xk . If columns J and k are non-orthogonal, then xi andxk are fixed to zero. Otherwise, columns J and k
are merged. In Figure (d), for every non-zero entry in transshipment row i , there corresponds a non-zero entry in (SPP) row l. Variables xk,x1,x,, and xs are fixed to zero. Consequently, xi is fixed to one. In Figure (e), x, is fixed to zero. Because, if x, is equal
to one, then one of the variables x,,xs, or x, must also be equal to one to satisfy constraint i . However, this solution does not satisfy constraint l .
90

C. USE OF HIDDEN NETWORK STRUCTURE
By finding a hidden network row submatrix of matrix A, (SPP) can be
transformed to a network flow problem with side constraints.
Let £1
be an ( ~ x n) row submatrix of A that is transformable to a network, and
let £2
denote the submatrix involving the rest of the rows of A. Thus, (SPP) can be
represented as:
minimize c'x
x binary
where e1
and e2
are conformable vectors consisting of all ones. Let T be a
transformation matrix of size (m1 + 1) x m1 • That is, pre-multiplying both sides of E1x = e1
by T, we obtain pure network constraints. The resulting reformulation of (SPP) is given
by:
minimize c'x
(HN) s.t. :NX =r
x binary
where :N is an (~ + 1) x n node-arc incidence matrix corresponding to a network, r is
the integral vector of requirements at (~ + 1) nodes in the network.
91

Ali et al. [1995] suggest heuristic procedures that may (with some mathematical
repairs to their presentation) reveal a row submatrix of SPP that is transformable to a
network. Then, they formulate SPP as a pure network flow problem with side
constraints, and present some reduction rules for the original SPP based on the flow
conditions in the network.
The reduction rules suggested by Ali et al. are similar to those presented in the
previous section: (1) singleton network row, (2) a transshipment row has exactly one +1
and one -1 entry, and (3) a transshipment row in (NS) is dominated by a transshipment
row in (SPP). The difference between the reductions suggested by Ali et al. and these
three reductions is that the former are implemented on the reformulation (HN), and the
latter are implemented on (NS). The other two reduction rules presented in the previous
section (i.e., (1) a transshipment row has all + 1 or all -1 entries, and (2) clique
dominance) can also be implemented on (HN) in addition to those suggested by Ali et al..
fu the previous section, we have shown that the outcome of each network
reduction can also be detected by a combination of known SPP reduction rules. Using
similar arguments, we see that the reductions that Ali et al. present as new can actually be
detected by a combination of known SPP reduction rules presented in Section A.
Next, we introduce a new method to obtain additional reductions in SPP. This
method originated while we were experimenting with the relationship between the
reductions observed in the reformulations and the known SPP reductions.
92

D. A NEW SPP REDUCTION METHOD: COLUMN SPLIT REDUCTION
1. Generating Valid Equalities That Yield More New Clique Reductions for SPP
Let i and k be two constraints in (SPP). Let J; denote the set of column indices
that have non-zero entries in row i, but not in row k . Let Jk denote the set of column
indices that have non-zero entries in row k , but not in row i . And, let J;k denote the set
of column indices that have non-zero entries in both rows. Thus, constraints i and k can
be written as:
Ixj+ "Lxj =1 (i) jeJ; jeJ,k
Ixj+ "Lxj =1 (k) jeJk jeJ;k
Proposition V.l: For some constraint I of (SPP), if N1 c (J; U Jk U J;k), (N1 n J;) c J;,
and (N1 nJk) c Jk, then the following constraint is a valid equality (i.e., this equality
constraint is satisfied by all integer solutions to (SPP)):
(V.2)
Proof: Columns j E (J;,k \ N1) U N1 are non-orthogonal, and their intersection graph
forms a clique. Thus, the following constraint is a valid inequality for (SPP).
L xj+ "Lxj ~1. je(J;k \N1) jeN1
Evidently, this valid inequality is dominated by row l. Using the "dominated rows"
reduction rule, the variables xj can be fixed to zero for j E (J;k \ N1).
93

Sets J; and Jk can be expressed as (J; \ N1) U (J; n N1) and (Jk \ N1) U (Jk n N1) ,
respectively. By implementing the variable reductions above, and replacing J; and Jk
with the new expressions, constraints i and k can be written as follows:
I xj+ I xj+ I xj=1 (k). je(Jk \N1) je(h nN/) je(J;k nNI)
Set N, can be expressed as the union of three disjoint subsets: (1) (J; n N1), (2)
(Jk n N1), and (3) (J;k n N1) • Thus, constraint I can be written as follows:
To satisfy constraint (/), exactly one of the variables xj must be equal to one for
j e N1
• For the three disjoint subsets of Nz, we have the following three cases to
consider:
Case ( 1): If X j = 1 for some j E (J; n Nz), then constraint i is satisfied. To satisfy
constraint k, exactly one ofthe variables xj must be equal to one for j E (Jk \N1).
Case (2): If xj = 1 for some j E (Jk n Nl) , then constraint k is satisfied. To satisfy
constraint i, exactly one ofthe variables xj must be equal to one for j E (J; \ N1) •
Case (3): If xj = 1 for some j E (J;k n Nl), then all three constraints i, k, and I are
satisfied.
94

Exactly one of the three disjoint cases must occur. This implies that exactly one
of the variables xj must be equal to one for j E (J; \ Nl)' j E (Jk \ Nl) ' or j E (Jik n Nl)
(i.e., j E (J; \ N1) U (Jk \ N1) U (J;k n N1) ). Thus, Equation V.2 is a valid equality for
(SPP). Q.E.D.
Equation V.2 states that each pair of columns Af and Ar are non-orthogonal for
j' E (J; \ N1) , and j" E (Jk \ N1) . This relationship is not obvious if we do not generate
the valid equality given by Equation V.2.
Recall that when we construct the intersection graph GA = (N,JE) of (SPP), we
define a node j EN= {1,2, ... ,n} for each column A1 of A, and join two nodes i * j EN
by an edge (i,j) e IE if the columns ~ and A1 of A are non-orthogonal. Given the
sub graph of G A constructed by the constraints i, k , and I only, there does not exist an
arc between a node j' E (J; \ N1) and a node j" E (Jk \ N1). This is because columns Af
and Ar have no common entry equal to + 1 in rows i, k, and I. However, when we add
the valid equality obtained from constraints i, k, and I to the formulation (SPP), both
columns Af and AJ" will have + 1 entries in common in this valid equality.
Consequently, we can add a new arc to the intersection graph G A for each pair of nodes
j' and j", such that j' e (J; \N1) and j" e (Jk \N1).
By extending the clique associated with the variables that have non-zero entries in
a valid equality, we may find new "clique reductions" for SPP. That is, if a column is
non-orthogonal to all columns with non-zero entries in a valid equality, then this column
95

is fixed to zero. Note that after we fix some variables as a result of these new clique
reductions, some other variable and/or row reductions may also become apparent in
(SPP).
The worst-case complexity of finding valid equalities using this new method is
0( m2 xI) , where m is the number of constraints and I is the number of non-zero entries
in matrix A. We choose a pair of rows from matrix A, and compare the non-zero entries
in these rows with the non-zero entries in the other rows. For each pair of rows, we make
at most I comparisons. The number of possible row pair combinations is:
m21-ml Thus, the number of comparisons 1s at most and the worst-case
2
complexity is O(m2 xI).
As stated in Section A.6, the worst-case complexity of finding clique reductions in
an SPP is O(m x n xI). Assuming that the number of columns is greater than the number
of rows, the worst-case complexity of extending the intersection graph using the new
method and finding clique reductions in the extended graph is still 0( m x n x I) .
When we implement the comparisons to detect the valid equalities, we can also
detect the "dominated rows" and "two rows differ by two entries" reductions. The
network reductions described in Sections V.B.4 and V.B.5 can also be detected during
these comparisons. Recall that the outcomes of these network reductions correspond to
combinations of"dominated rows" and "clique" reductions.
96

Example V.S: Consider the following three constraints taken from an SPP.
XI +x6 +x7 +Xg +x9 +xw +xll = 1 (i)
XI +x2 +x3 +x4 +xs +x6 +x9 = 1 (k)
+x4 +xs +x9 +xlo +xll = 1 (/)
J; = {7,8,10,11}, Jk = {2,3,4,5}, Jik = {1,6,9}, and N1 = {4,5,9,10,11};
Thus, by Proposition V.1 the following equation is a valid equality for the given SPP.
= 1 (v)
If x2 or x3 is equal to one, then xl'x4,x5,x6, and x9 are equal to zero. Hence, to
satisfy constraint l, either x10 or x11 must be equal to one. This implies x7 and x8 must
be equal to zero to satisfy constraint i .
If x7 or x8 is equal to one, then x1, x6, x9, x10 , and x11 are equal to zero. Hence, to
satisfy constraint l, either x4 or x5 must be equal to one. This implies x2 and X3 must
be equal to zero to satisfy constraint k .
If x9
is equal to one, then all the other variables that have a non-zero entry in
constraints i , k , and l are equal to zero.
For the case where all variables x2,x3,x7,x8, and x9 of the valid equality v are
equal to zero, the given SPP is infeasible.
97

Consequently, we have justified that constraint v is satisfied for all integer
solutions to the given SPP, and therefore is a valid equality.
2. Computational Results For The Column Split Reduction
We test the column split reduction on a subset of real-world airline crew
scheduling problems that are also used by Hoffman and Padberg [1993]. The test data is
obtained from the online OR-Library [2000] presented by J.E. Beasley.
Table V.l shows our computational results on twelve sample problems. Unlike
the algorithms presented in chapters III and N for solving SPPs with special consecutive
ones structures, the column split reduction can be applied to any SPP. Consequently, in
this chapter we test the column split reduction with a wider diversity of airline crew
scheduling samples.
We report the maximal number of clique reductions obtained at the root node of
the B&B tree, and the maximal number of clique reductions obtained when the new
method is introduced.
These reductions are implemented with Compaq Visual Fortran [1999] on a
Pentium III 700Mhz personal computer with 1 Gb RAM. The largest problem SPPUS02
takes about three minutes to presolve with or without the new method. The small
problems take less than a second. Here, as in any commercial solver, efficiency dictates
that we carefully implement the column split reduction and take care to avoid extensive
presolve times. We must balance presolve effort with the desirable reductions that
accrue.
98

For test data SPPUS02, the column split reduction method yields a 38.4% increase
in the number of variables fixed. However, for test data SPP03, the percentage increase
is only 0.4%.
Number of %of Variables Number of Arcs Number of Clique %of Variables Number of %of
Problem Number Number of Number of Original
Fixed Before Added to tbe Reductions After Fixed After Additional Additional Clique
Name Of Rows Columns Non-zeros Reductions Adding Arcs Intersection
Adding New Arcs Adding Arcs Variables Variables
Graoh Fixed Fixed
SPPAAOl 823 8,904 72,965 1,095 12.30 7,876,877 1,533 17.22 438 4.92
SPPAA02 531 5,198 36,359 1,015 19.52 50,949,975 1,328 25.55 313 6.03
SPPAA03 825 8,627 70,806 1,614 18.71 10,321,196 1,964 22.77 350 4.06
SPPAA04 426 7,195 52,121 780 10.84 4,563,495 1,075 14.95 295 4.11
SPPAAOS 801 8,308 65,953 1,544 18.58 10,300,739 1,959 23.58 415 5.00
SPPAA06 646 7,292 51,728 1,074 14.73 5,955,250 1,425 19.54 351 4.81
SPPNW23 19 711 3,350 93 13.08 6,097 105 14.76 12 1.68
SPPNW26 23 771 4,215 123 15.95 2,390 130 16.86 7 0.91
SPPNW28 18 1,210 8,555 379 31.32 6,455 384 31.73 5 0.41
SPPNW35 23 1,709 10,494 256 14.97 18,810 310 18.14 54 3.17
SPPNW36 20 1,783 13,160 263 14.75 12,004 376 21.09 113 6.34
SPPUS02 100 13,635 192,716 100 0.73 34,632,043 5,339 39.16 5,239 38.43
Table V.l. Computational Results of the Column Split Reduction. The first column shows the name of each sample problem as it appears in the online reference OR-Library [2000]. The numbers of clique reductions obtained before and after implementing the new method are displayed as well as the percentage of variables fixed using the clique reduction rule. The last column displays the percentage of improvement achieved in the number of reductions using the new method.
Our results show that the column split reduction can significantly increase the
number of reductions in an SPP. Moreover, we conjecture that finding such reductions
will improve the solution time and/or allow some unsolvable real-world SPP applications
to be solved (e.g., Hoffinan and Padberg [1993, pp. 665-666]).
99

E. EXTRACTING HIDDEN ARCS OF THE INTERSECTION GRAPH BY PROBING
Another way of extending the intersection graph G A with the addition of new arcs
is fixing variables by probing. Probing has been used effectively in general mixed 0-1
integer programming (e.g., [Crowder et al. 1982], [Savelsbergh 1994], and [Atamturk et
al. 1995]). Probing a binary variable means tentatively setting the variable to one of its
bounds and observing the implications of this setting. For instance, if an infeasibility
occurs when the variable is fixed to one of its bounds, then the binary variable can be
fixed to the opposite bound. To the best of our knowledge, probing has not been used to
extend the intersection graph GA. In this section, we demonstrate but do not implement
how we can extend the intersection graph G A with the addition of new arcs by probing
variables.
If we fix a variable xj to one, all the incident rows are satisfied and can be
removed. Moreover, all other columns incident with any of these rows can be fixed to
zero. After removing all the incident rows and fixing the columns incident with these
rows to zero, a second pass through the resulting smaller matrix is initiated if any
additional variables are fixed using the known reduction operations. Let x1 be the
variable that is fixed to zero during the second pass. Then, the following constraint is a
valid inequality for (SPP):
Note that columns j and l are orthogonal in the original A matrix, and there does
not exist an arc between nodesj and lin the intersection graph GA. However, the valid
100

inequality above allows us to connect nodes j and l with an arc in the intersection graph
G A • We call this a hidden arc.
In Example V.S, if we fix x2 to one, constraint k is removed and x1 , x3 , x4 , x5 ,
x6 , and x9 are fixed to zero. After these reductions, constraints i and k can be written as:
(i)
(!)
Because constraint i is dominated by constraint!, x7 and x8 can be fixed to zero.
Therefore, if x2 is equal to one, then x7 and x8 are equal to zero.
On the other hand, if x2 is fixed to zero, then either one of x7 or x8 is equal to
one, or they are both equal to zero. Hence, the following constraint is a valid inequality
for the given SPP:
The node corresponding to x2 can be connected to nodes 7, and 8. Similarly, by
probing x3 , we can connect node 3 to nodes 7, and 8.
By probing each' variable in an SPP as discussed above, we can extract all the
hidden arcs of the intersection graph. The number ofhidden arcs that can be extracted in
the intersection graph by probing is at least the number of arcs that can be extracted using
the row comparison technique, described in Section V.D.l.
The worst-case complexity of naively finding all the hidden arcs of the
intersection graph by probing is O(n2 x m x l). Each variable x1 is fixed to one, all the
101

incident rows are removed, and all the other columns incident with any of these rows are
fixed to zero. A second pass through the resulting smaller matrix is initiated if any
additional variables are fixed using the known reduction rules. This is done in
O(n x m x l) for a single variable, because the worst-case complexity of finding clique
reductions is O(n x m x l). Hence, for all variables the worst-case complexity is
O(n2 xmxl).
Note that extending the intersection graph GA with the addition of new arcs
generated by probing may offer new valid inequalities for SPP (e.g., clique or odd cycle
constraints discussed in [Hoffman and Padberg 1993]). However, extracting the hidden
arcs of the intersection graph by probing, and finding valid inequalities in the extended
intersection graph may be computationally very expensive.
102

VI. A NEW FORMULATION FOR A LONG-TERM AIRCRAFT CARRIER DEPLOYMENT SCHEDULING PROBLEM
A. BACKGROUND
Forward deployment of Navy aircraft carrier battle groups and amphibious ready
groups is a primary means for U.S. to advance overseas interests. As Department of the
Navy, Naval Doctrine Publication 1 [NDP 1, 1994] states: "Overseas presence promotes
national influence and access to global areas, builds regional coalitions and collective
security, furthers stability, deters aggression, and provides initial crisis-response
capability."
Aircraft carriers are sovereign U.S. territories that navigate anywhere in
international waters (more than 70% of the earth's surface is ocean). This fact is not
overlooked by those U.S. officials who make political and strategic decisions to use naval
aircraft carriers as a powerful instrument of diplomacy to strengthen alliances and
respond to potential and developing crises. As President Bill Clinton said during a recent
visit to the aircraft carrier USS Theodore Roosevelt, "When word of crisis breaks out in
Washington, it's no accident the first question that comes to everyone's lips is: where is
the nearest carrier?" [U.S. Navy 1998]
At present the Navy attempts to maintain the forward presence of aircraft carriers
m three Areas of Responsibility (AORs): the Mediterranean under the European
Command (EUCOM), the Indian Ocean under the Central Command (CENTCOM), and
in the Western Pacific under Pacific Command (P ACOM). Carriers from the Atlantic
Fleet (LANTFLT) fulfill forward presence requirements for the EUCOM (Mediterranean
103

Sea) AOR. Pacific Fleet (PACFLT) carriers provide coverage for the CENTCOM (Indian
Ocean) and P ACOM AORs. Occasionally, an Atlantic Fleet carrier will also assist in
covering the Indian Ocean. Finally, a PACOM carrier operating from Yokosuka, Japan,
is usually responsible for the Western Pacific.
Over the past decade or so, the Navy has tried to maintain a continuous forward
carrier presence in these principal AORs. Diminishing defense budgets have limited the
number of carriers available to meet this goal. Carrier availability is further constrained
by scheduled maintenance, training requirements, and Chief of Naval Operation (CNO)
policy on Personnel Tempo of Operations (PERSTEMPO). These restrictions, along with
limited available assets, have made continuous carrier coverage (i.e., the percentage of
time an AOR is covered by at least one carrier) essentially impossible.
Providing a sufficient amount of coverage in the AORs through forward presence
helps to decrease crisis response time. "Crisis response, the timely dispatch of naval
forces to a specific area, allows the U.S. to render assistance or exert military force."
[Department of the Navy 1994, pg. 20] Herein, crisis response time is defined as the
expected time for the closest carrier to arrive at a crisis location.
A new nuclear powered carrier costs about five billion dollars, its aircraft cost at
least as much, and when deployed it is manned by 3,200 ship's company and 2,480 air
wing personnel. The air wing consists of eight to nine squadrons (85 aircraft). A carrier
operates as the centerpiece of a carrier battle group. A carrier battle group, commanded
by a flag officer, normally consists of two guided missile cruisers, a guided missile
destroyer, a destroyer, a frigate, two attack submarines, and a combined ammunition,
104

oiler, and supply ship (AOE). Figure VI.1 shows USS Nimitz (CVN 68), a nuclear
powered aircraft carrier in P ACFL T.
Figure VI.l. USS Nimitz (CVN 68), launched in 1975, has 3,200 crew in the ship's
company and 2,480 for the air wing. The mission ofNimitz and her embarked air wing is
to conduct sustained combat air operations. The air wing consists of eight to nine
squadrons (85 aircraft). The ship normally operates as the centerpiece of a carrier battle
group. The carrier battle group, commanded by a flag officer, consists of two guided
missile cruisers, a guided missile destroyer, a destroyer, a frigate, two attack submarines,
and a combined ammunition, oiler, and supply ship. [U.S. Navy 1998]
The objective ofthe U.S. Navy aircraft carrier scheduling problem is to minimize
the number of uncovered periods across all AORs, subject to the constraints on the
105

number of available carriers, scheduled maintenance, training requirements, and CNO
policy on PERSTEMPO, for a planning horizon often years.
To date, there have been two optimization-based approaches suggested for solving
the U.S. Navy aircraft carrier scheduling problem. The first one is the classical set
partitioning model introduced in Chapter I, Section A.3. The other one is a two
commodity network flow model with side constraints, which is also an integer program.
The two-commodity network flow model with side constraints is introduced by
Schauppner [1996], and used by Brown et al. [1997] in an optimization-based model
called the Coverage and Response Estimation (CoRE). CoRE is developed to estimate
the level of forward presence sustainable by various numbers of carriers. CoRE honors
pre-determined, exogenous, fixed scheduled maintenance periods for each carrier, which
are stipulated by a long-range schedule published by the ;elanning and Engineering for
Repairs and Alterations Activity for the Aircraft Carriers (PERA CV). CoRE schedules
the Navy's actual carriers for deployment around these fixed periods of availability in
order to maximize coverage in the AORs.
Ayik [1998] generalizes CoRE by incorporating the synchronous planning of
deployments and major maintenance availabilities. Ayik's formulation is also a two
commodity network flow model with side constraints.
This chapter presents a new integer programming formulation for the long-term
aircraft carrier scheduling problem. We first describe the scheduling factors and
operations constraints. Next, we present the previously suggested model, a two-
106

commodity network flow problem with side constraints. Then, we introduce the new
formulation and compare it with the previous models.
B. AIRCRAFT CARRIER DEPLOYMENT SCHEDULING FACTORS AND OPERATIONS CONSTRAINTS
The deployment scheduling of carriers depends on five factors:
(i) depot level maintenance,
(ii) work-up cycle,
(iii) Personnel Tempo of Operations (PERSTEMPO),
(iv) transit time, and
(v) availability ofLANTFLT carriers for CENTCOM.
Each ofthese factors is described below.
1. Depot Level Maintenance
Depot level maintenance is defined as "that maintenance which requires skills or
facilities beyond those of the organizational and intermediate levels and is performed by
naval shipyards, naval ship facilities, or item depot activities" [OPNA V 1992]. While at
depots, carriers undergo large-scale maintenance, repairs, approved alterations, and
modifications to update and improve the carrier's technical and military capabilities.
Each carrier periodically requires maintenance of differing durations. In general, these
maintenance periods are for
107

(i) incremental maintenance lasting approximately six months,
(ii) incremental maintenance requiring dry docking, which lasts approximately
twelve months, or
(iii) complex overhaul and possibly nuclear refueling, with a duration
exceeding two years.
U.S. Navy ships accomplish depot maintenance at notional intervals, durations,
and repair man-days set forth in OPNA VNOTE 4700 [OPNAV 1996b, pg. 3]. "Interval
is defined as the period from the completion of one scheduled depot availability to the
start of the next scheduled depot availability. Duration is defined as the period from the
start of an availability to its completion. Repair man-days are those Type Commander
maintenance man-days typically accomplished by the executing activity to satisfactorily
complete the type of availability indicated."
A sample notional depot maintenance cycle for a Nimitz class aircraft carrier is
provided in Figure Vl.2:
Not in Notional
Maintenance Availability
~~ PSAI ------------- jSRAj ------------- jDSRAj ------------- jSRAj ------------- jCOHj
0 18 21 39 44.5
PSA : Post Shakedown Availability SRA : Selected Restricted Availability DSRA : Docking SRA COH : Complex Overhaul
62.5 65.5 84 102
Figure VI.2. Sample Notional Depot Maintenance Availability for a Nimitz Class
(CVN 68) Aircraft Carrier. The dashed time lines indicate periods not in maintenance.
The time line numbers indicate months (but not to scale). A Post Shakedown Availability
(PSA) may require only a few months, while a Complex Overhaul (COH) may take years.
108

To ensure compatibility between a ship's employment schedules and depot
workloads, CNO authorizes deviation from the notional depot availability interval as
shown in Table VI. I.
Months from Start of Maintenance Allowable Months Deviation Cycle to Start ofMaintenance Period of Start of Maintenance Period
0-36 mo +/- 3 mo 37-48 mo +/- 4 mo 49-60 mo +/- 5 mo 61-72mo +/- 6 mo 73-84 mo +/- 7 mo
>84 mo +/- 7 mo
Table VI.l. CNO Guidelines for Altering Scheduled Maintenance Periods. During a maintenance cycle, each scheduled maintenance period may be shifted forward, or backward by a number of months increasing as we progress into the far future. A maintenance cycle starts after the completion of a carrier's overhaul (or docking availability, when no overhaul availabilities are included in the maintenance plan) and ends after completion of the next overhaul or docking availability. For new construction ships, the maintenance cycle starts after completion of the post shakedown availability. [OPNAV 1996b, pp. 3-4]
Figure VI.3 shows the allowable deviation durations corresponding to the notional
depot maintenance availabilities, provided in Figure VI.2, for a Nimitz Class (CVN-68)
aircraft carrier.
109

Start of Maintenance
Cvcle
~
Start of Notional
A vailabilitv
~ PSAI ------------- !SRAI ------------- IDSRAI------------- !SRAI ------------- !COH!
0
Allowable Deviation:
18 21
y +/- 3 mo
39 44.5
~ +!- 4 mo
62.5 65.5 84 102
"-y---J ~ +/- 6 mo +/- 7 mo
Figure VI.3. Allowable Deviations Corresponding to the Notional Depot Maintenance Availabilities for the Nimitz Class (CVN 68). This maintenance cycle
begins at month 0. Notional start time for the first scheduled maintenance, a Selected
Restricted Availability (SRA), is 18 months from the beginning of the maintenance cycle,
and can be shifted forward or delayed by up to three months. The time line is not to
scale.
Depot maintenance of aircraft carriers is conducted at four major repair facilities:
(i) Puget Sound Naval Shipyard (PUGET),
(ii) Norfolk Naval Shipyard (NORV A) (Figure V1.4),
(iii) Y okosuka Ship Repair Facility (YOKO), and
(iv) Newport News Shipbuilding Company (NEWS).
110

Figure VI.4. Norfolk Naval Shipyard Aerial View. The NORFOLK NAVAL
SHIPYARD in Portsmouth, Virginia, is one of the largest shipyards in the world
specializing in repairing, overhauling and modernizing ships and submarines. It is the
oldest and largest industrial facility belonging to the U.S. Navy, and is also the most
multifaceted. At the extreme left -center is an empty dry dock that can accommodate an
aircraft carrier.
Scheduling depot maintenance availabilities for aircraft carriers requires
consideration of four factors:
(i) repair requirements for the ship,
(ii) forward deployment requirements by the Navy,
(iii) availability of the shipyards, and
(iv) capacity of the shipyards.
The limitations associated with shipyard capacity and availability are as follows:
111

a. Dry docking Capacity And Availability
PUGET has two dry-docks that can handle aircraft carriers. There is one
large dry dock for all carriers (nuclear or non-nuclear), and a second slightly smaller one
that can handle only non-nuclear carriers. NORVA has one dry dock that can handle
either nuclear or non-nuclear carriers. NEWS has two dry docks available which can
handle any size carrier. NEWS also has several building docks that are used for carrier
construction.
"Drydocking can be conducted at any time during a docking availability, and normally takes one quarter of the total availability period to complete. By coordinating drydocking schedules, a shipyard may be able to accommodate simultaneous overhauls." [Brown 1998]
b. Repair Man-day Availability
Repair man-days are an important secondary consideration when
scheduling maintenance. While there is no limitation on man-day availability, excessive
man-day requirements are avoided by staggering depot level maintenance periods to
minimize overlaps. Current scheduling practice is to limit the overlap of simultaneous
carrier maintenance periods at a given shipyard to 3 months or less in order to avoid man-
day shortfalls. [Brown 1998]
Figure Vl.5 depicts the overlap of maintenance periods in the same
shipyard.
112

CVN 71 5/6/2004 DPIA 3117/2005 ----N~O-R_V_A _____ ___
CVN 73 9/2 7/2004 __ ..;;;D....;P....;I;_A ______ 8 I 12/2 0 0 5
NORVA
D PIA : Docking Planned Incremental Availability
NOR VA: Norfolk Naval Shipyard
Figure VI.5. Overlap of Two Carrier Maintenance Periods in the Same Shipyard
(taken from PERA CV schedule data [OPNAV Report 4710, 1996a]). Scheduled
DPIA for CVN 71 begins on May 6, 2004 and ends on March 17, 2005. The DPIA for
CVN 73 begins on September 27, 2004 and ends on August 12, 2005. There is an
overlap of approximately six months that may adversely affect the man-day availability in
the shipyard.
c. Refueling Availability
Nuclear refueling must be conducted at NEWS: "Refueling of nuclear-
powered carriers must be conducted at NEWS. Due to the budget constraints, it is
preferable to refuel one carrier at a time. However an overlap of at most six months can
be accepted." [Brown 1998]
2. Work-Up Cycle
After depot level maintenance and prior to deployment, all ships are required to
execute a Tactical Training Strategy (TTS) that takes place during the period known as
the work-up cycle. This work-up cycle ensures that the crew is properly trained and that
the ship is ready for deployment.
Conceptually, work-up begins after the completion of maintenance and lasts
approximately 11.5 months. However, the record ofrecent carrier deployments suggests
that operational exigencies often curtail pre-deployment work-up. Work-ups are
113

scheduled according to the following criteria: When the maintenance period is six
months or less, the carrier can deploy fifteen months after the start of maintenance. If the
maintenance period is between six and twelve months, then the carrier can deploy
nineteen months after the start of maintenance. Finally, if the maintenance is a refueling
complex overhaul (RCOH), or the carrier has just been commissioned, it cannot deploy
for twelve months after the completion of maintenance or port-shakedown availability.
[Brown et al. 1997, pg. 3 7]
3. Personnel Tempo Of Operations
Navy policy restricts at-sea time in the interest of promising personnel a
reasonable amount of time stationed in home port with the families.
"In order to ensure a balance between the support of national objectives and reasonable operating conditions for Naval personnel, the CNO initiated the Personnel Tempo of Operations (PERSTEMPO) program. The PERSTEMPO program achieves this balance by placing peacetime utilization limitations on all Navy units deployed from their homeport. There are three utilization limitations:
(1) The maximum length of a deployment cannot exceed six months (180 days).
(2) There must be a minimum of a 2-to-1 Turn Around ratio (TAR) between deployments. This means that a carrier must remain home for at least 12 months following a six-month deployment.
(3) Over the course of a five-year cycle (three years historical, two years projected), a carrier must spend a minimum of 50% of its time in homeport.
A carrier cannot deploy unless it satisfies these PERSTEMPO restrictions." [OPNAV 1990]
114

A memorandum from N81 concludes that a TAR of2.61 to 1 is more reasonable
[Brown et al. 1997, pg. 37].
4. Transit Time
Per OPNA V guidance, the transit time between San Diego and the Persian Gulf is
45 days [Brown et al. 1997, pg. 37]. PACFLT carriers from Bremerton or Everett,
Washington must transit to San Diego to load the air wing before heading west toward
the Persian Gulf. This adds six days to the transit time in both directions. For LANTFLT
carriers, the transit time from Norfolk or Mayport to EUCOM is 13 days. However, it
takes only eleven days for LANTFLT carriers to return to their homeports.
5. Availability OfLANTFLT Carriers For CENTCOM
LANTFLT carriers can be deployed to CENTCOM to compensate for the loss of
coverage due to the longer transit time required for P ACFLT carriers to reach
CENTCOM. A memorandum from N81 establishes that the LANTFLT carriers should
provide 24% ofCENTCOM coverag.e [Brown et al. 1997, pg. 37].
C. SCHEDULE PERIODS
A carrier is in one of the following states during each period:
(i) maintenance,
(ii) work-up,
(iii) deployable, or
(iv) non-deployable.
When the amount of time between the end of one work-up period and the next
maintenance period is at least 180 days, then a deployment is possible. This block of
115

time is referred to as a deployable period. If the total number of such intervening
available days is less than 180, it is a non-deployable period.
Figure VI.6 displays a sample two-year schedule for four carriers (A, B, C, and
D). For the purposes of illustration, the time resolution is chosen to be in months for each
period of the planning horizon.
116

2
0
0
0 SCHEDULED
MAINTENANCE
WORK-UP B CYCLE
DEPLOYABLE B PERIOD
2 NON-DEPLOYABLE Ill 0 PERIOD
0
Figure VI.6. A Sample Two-Year Schedule for Aircraft Carriers. The dark shaded cells represent time in maintenance. Following each maintenance period is a sequence of light shaded cells to indicate the required work-up period. Blank cells represent deployable periods, and vertical striped cells represent non-deployable periods.
117

1. Shifting Maintenance Periods
Maintenance availabilities can be shifted to increase AOR coverage as follows.
Figure Vl.7 depicts a deployment cycle of an aircraft carrier. If we shift the former
maintenance period in Figure VI.7 one month earlier (to the left), then this maintenance
period will be completed at the end of the second month. Therefore, the work-up period,
and hence the deployable period, will also shift and begin one month earlier. Eventually,
the new deployable period will last for 8 months, beginning in month 15 and ending in
month 22. In addition, we can also increase the deployable period by one month by
shifting the later maintenance period (to the right) so that it begins one month later.
Figure Vl.8 depicts the effects of such shifting.
MONTHS
- Scheduled Maintenance
Deployable Period
Figure VI.7. A Deployment Cycle for an Aircraft Carrier. The cycle begins with a
maintenance period of three months, followed by a work-up period of twelve months, and
ends with a deployable period of seven months beginning with month 16 and ending in
month 22, after which another maintenance is scheduled.
118

,_ Figure VI.8. Shifting of Maintenance Periods. From Figure Vl.7, the former (left) maintenance period is shifted one month earlier (to the left), and the second period one month later (to the right) increasing the length of the deployable period by two months.
Shifting maintenance periods may cause an undesirable overlap. This problem
will arise if we shift one or both of any two maintenance periods towards each other
causing an overlap that exceeds the allowable dry dock, refueling, or man-day availability
limits. Potentially overlapping maintenance periods are called critical maintenance pairs.
The maintenance period that starts earlier is called the first element of the pair, and the
other maintenance period is called the second element of the pair. Figure VI.9 depicts a
sample critical maintenance pair.
~ 0 I I 0 7 I 9 7 _____ R_c_o_H ___ _ Carrier A 01107198
Carrier B 01101197 RCOH 01101198 ------------RCOH: Refueling Complex Overhaul
Figure VI.9. A Sample Critical Maintenance Pair. The overlap between two Refueling Complex Overhauls (RCOHs) is six months, which is the maximum allowable limit for refueling nuclear-powered aircraft carriers. If we shift one or both RCOHs towards each other, as shown with the arrows, then the overlap will exceed this limit. However if we shift them in the same direction, the overlap will not change and the refueling constraint will not be violated. The RCOH of Carrier B is the first element of the pair, and the other RCOH is the second element.
119

2. Possible Deployment Schedules In A Deployable Period
a. For PACFLT Carriers
If we assume the carrier in Figure VI. 7 to be a P ACFLT carrier, then it can
be deployed in only one possible way as shown in Figure VI.1 0.
MONTHS
c C: CENTCOM
Figure VI.lO. From Figure VI.7, a Possible PACFLT Deployment Schedule for a
Deployable Period. The carrier can be deployed to CENTCOM from the beginning of
the month 16 to the end of the month 21. The carrier is not deployed in month 22,
because there should be at least a one-month delay between the end of a deployment period and the start of a maintenance period [Brown et al. 1997, pg. 59].
After maintenance shifts of Figure VI.8, we can deploy this carrier in three
alternate ways (Figure VI.11 ).
MONTHS
S: Schedule
S2 S3 c
C:CENTCOM
c c c
Figure VI.ll. Alternate Candidate Schedules for the PACFLT Carrier in the
Shifted Deployable Period of Figure VI.S. S 1 is an early deployment, S2 is a normal
deployment, and S3 is a late deployment.
120

The first deployment schedule (S 1) in Figure VI.11 is defined as an early
deployment. It becomes available by shifting the preceding maintenance period one
month earlier. The second schedule (S2) is called a normal deployment. This
deployment schedule requires no maintenance shifting. The third schedule (S3), a late
deployment, is obtained by shifting the following maintenance period one month later.
For the special case of a seven-month deployable period, obtained by expanding a five
month non-deployable period by two months (one month from each end), the result is
called an early-or-late deployment.
If we select an early deployment m an optimized solution, then the
preceding maintenance period must be shifted to begin one month earlier. If a normal
deployment is selected, no change is required. A late deployment requires that the
following maintenance period begin one month later. Finally, if an early-or-late
deployment is selected, both preceding and following maintenance periods must be
shifted away one month.
b. For LANTFLT Carriers
A LANTFLT carrier can deploy to EUCOM for twenty-one weeks, or
alternatively, to EUCOM for 15 weeks and CENTCOM for an additional six weeks.
Figure VI.12 depicts possible schedules for a sample deployment cycle of a LANTFLT
carrier, and also shows the scheme of EUCOM and CENTCOM coverage combinations.
(For purposes of illustration using monthly increments, it is assumed in the figure that
CENTCOM coverage is two months instead of six weeks.)
121

Sl E E E E E E
82 E c c E E E
83 E E c c E E
84 E E E c c E
s : Schedule c : CENT COM E : EUCOM
Figure VI.12. Possible Schedules for a Sample Deployment Cycle of a LANTFLT
Carrier. The carrier can be deployed either for six months in EUCOM, or for a
combination of two months of CENTCOM deployment and four months of EUCOM
deployment.
D. TWO-COMMODITY NETWORK FLOW PROBLEM WITH SIDE
CONSTRAINTS
1. Optimization Model Generation
Possible deployment schedules for each carrier and deployment cycle are
generated according to the criteria stated in the previous sections. After generating all
possible deployment schedules, the next step is to find all feasible combinations of these
schedules. The coverage gaps between each pair of schedules should not exceed a
specified length oftime that is referred to as max-gap [Schauppner 1996, pg. 15].
When a feasible combination of schedules is sorted chronologically, every pair of
successive schedules must belong to different deployable periods. If two successive
schedules i andj belong to carriers A and B, respectively, in the same fleet, then carrier A
should depart its homeport before carrier B. This ensures that the two carriers do not
cover an AOR for exactly the same period. Two deployment schedules are said to be
compatible when they satisfy these conditions.
122

Table Vl.2, Figure Vl.13, and Figure Vl.14 illustrate compatible and incompatible
pairs of deployment schedules. Table VI.2 shows a sample two-year schedule for four
aircraft carriers. The first two are PACFLT carriers and the other two are from
LANTFLT. The deployable periods of the carriers in Table VI.2 are already increased by
shifting the associated maintenance and work-up periods. Figure VI.12 displays coverage
gaps and coverage overlaps (the length of time in which more than one carrier is in an
AOR) that will occur in CENTCOM for each pair of compatible deployment schedules.
Figure Vl.15 displays coverage gaps for EUCOM. For purposes of illustration only, the
transit times to and from CENTCOM are assumed here to be 30 days each for PACFLT
carriers. For LANTFLT carriers, the transit times to and from EUCOM are assumed here
to be 15 days. The transit times between CENTCOM and EUCOM are not taken into
account here.
123

Table VI.2. A Sample Two-year Schedule for Four Aircraft Carriers. Each row
represents a month, and each column represents a deployment schedule. The first column
is labeled AEl. A represents the carrier, E indicates that the schedule is an early
deployment, and 1 is the schedule number for the carrier in this deployable period. A
column label with second character N, represents a normal deployment, L means a late
deployment, and ELan early-or-late deployment.
AE! AN2 AN3 AL4 BE! BL2 CE! CE2 CE3 CE4 CL5 CL6 CL7 CL8
AE 1 7 8 4 5 6 5 6 7
AN2 3 4 5 4 5 6
AN3 2 3 4 3 4 5
AL4 1 2 3 2 3 4
BEl BL2 CE! C E2 1 2 CE3 0 1 CE4 -1 0 CL5 CL6 0 1 CL 7 - 1 0 CL8 -2 - 1 DEL 1 DEL2 - 1 0 1 2 1 0 11 7 8 9 9 1 0 II
D EL3 -2 -I 0 I 9 I 0 6 7 8 8 9 I 0 DEL4 -3 -2 -I 0 8 9 5 6 7 7 8 9
Figure VI.13. Coverage Gaps and Overlaps that Accrue in CENTCOM for Each Pair of Compatible Deployment Schedules. Each row indicates the first carrier in a
pair, and each column the second. For example, cell (AEl, BEl), has a value of7: if we
first deploy carrier A with AEl, and then deploy carrier B with BEl, then there will be a
coverage gap of seven months in CENTCOM, starting from the beginning of AEl and
ending at the end of BEl. A negative number indicates overlap periods. For example,
cell (DEL2, AEl) shows that carriers D and A will cover CENTCOM together for one
month. Blank cells represent incompatible pairs or pairs for which one or both schedules
do not provide any coverage of CENT COM. 124

First we calculate overlap values. Then, for the purposes of avoiding undesired
amounts of overlap, the values that are longer than a specific maximum overlap value are
eliminated. The remaining overlap values are assigned to zero, in order to restate them in
terms of coverage gaps.
CE I CE2 CE3 CE4 CL5 CL6 CL 7 CL8 CEI CE2 CE3 CE4 CL5 CL6 CL7 CL8 DEL I 4 4 4 4 5 5 5 5 DEL2 6 6 6 6 7 7 7 7 DEL3 6 6 6 6 7 7 7 7 DEL4 6 6 6 6 7 7 7 7
Figure VI.14. EUCOM Coverage Gaps for Each Pair of Compatible Deployment Schedules. Unlike the situation shown in Figure VI.l3, there are no overlaps here.
Note that Figures VI.13 and VI.14 are node-node adjacency matrices of a network
(e.g., [Ahuja et al. 1993]). Figure VI.15 represents the network underlying Figure VI.14.
Nodes Sl and Tl are added to represent the starting and termination of the planning
horizon for EUCOM coverage. The other nodes correspond to deployment schedules for
carriers. Costs associated with arcs originating from node S 1 and terminating at schedules
DELl to DEL4 correspond to the coverage gap (in months) from the beginning of the
planning horizon to the start of EUCOM coverage by carrier D. To simplify Figure
VI.15, arcs from Sl to nodes CEl through CL8 are not shown. Similarly, costs
associated with arcs from schedules CEl through CL8 to node Tl correspond to the
coverage gap evident from the end of coverage by carrier E to the end of the planning
125

horizon. A network corresponding to Figure VI.13 is similarly constructed with nodes S2
and T2 added to represent the start and termination of the planning horizon for
CENTCOM.
Figure VI.15. Network Depicting Possible Sequencing of Deployment Schedules for
EUCOM. Sl is the start node, and Tl the termination node ofthe network indicating the
beginning and end of the planning horizon, respectively. Any other node in the network
represents a deployment schedule. Each arc length corresponds to the coverage gap
between the two associated deployment schedules. Nodes CE3, CE4, CL5, and CL6
exist, but are not displayed in the figure.
For each of the two networks (one for CENTCOM and one for EUCOM)
described above, we can derive feasible paths beginning with S 1 or S2, visiting at most
one node (or schedule) in each deployable period, and ending with Tl or T2. Figure
126

VI.16 depicts two sample feasible paths, one derived from the CENTCOM network, and
the other from the EUCOM network. Because a LANTFLT carrier can cover both
CENTCOM and EUCOM in the same deployment schedule, a feasible path from the
CENTCOM network may have common nodes with another feasible path from the
EUCOM network.
EUCOM : Total Gap = 14 months
a 1.5
~® 4
~e 8.5
~e)
CENTCOM : Total Gap = 14 months
a 3
~a 4
~e 2
~e~
Figure Vl.16. Two Sample Feasible Paths: One Derived from the EUCOM Network, and the Other from the CENTCOM Network. Node CE2 is common to both paths, meaning that LANTFLT carrier covers both EUCOM and CENTCOM in the same schedule. Each arc length corresponds to the coverage gap, in months, between the two associated deployment schedules.
At this point, the carrier deployment problem is reduced to finding two paths that
satisfy the conditions discussed above, and that yield a minimum gap. This problem can
be formulated as a two-commodity network flow problem with side constraints.
2. Model Formulation
Using the two-commodity network model with side constraints, the mathematical
formulation for the long-term synchronous aircraft carrier deployment and major
maintenance scheduling problem is provided below:
127

Indices:
a AORs (EUCOM and CENTCOM)
c carriers
d deployable periods (1, 2, ... , D-1, D)
i,j nodes in the networks representing the schedules (Nodes sa and r represent
the beginning and the end of the planning horizon, respectively)
s dry docking or refueling shipyards (Newport News, Puget Sound, and
Norfolk)
p critical maintenance period pairs (i.e., maintenance periods that will
overlap more than the allowable dry docking, refueling, or man-day
availability limits when shifted towards each other).
Index Maps:
<I> a = { c: carrier c can cover AOR a}
Q~ = { i: schedule i belongs to deployable period d of carrier c}
e~ = { i: schedule i belongs to early deployments of period d of carrier c}
A~ = {i: schedule i belongs to late deployments of period d of carrier c}
r = {i: schedule i covers both AORs}
l:!.c = {d: period d of carrier c is obtained as deployable by shifting
maintenance periods}
128

E: = {i: schedule i belongs to early deployments of the deployable period right
after the second element of critical maintenance period pair p ( i.e., the
maintenance period which starts later) for shipyards}
V: = {i: schedule i belongs to late deployments of the deployable period right
before the first element of critical maintenance period pair p ( i.e. the
maintenance period which starts earlier) for shipyards}
Data:
gap length in AOR a if node j follows node i in a path
EXISTJ equals 1 if there is an arc from node i to node j for AOR a
WEIGHT a weight for coverage gap in AOR a (e.g., a CENT COM weight of
3, and a EUCOM weight of 1)
CONST sufficiently small number to penalize the early or late deployments
(units of months)
(Binary) Decision Variables
x; equals 1 if arc (i,j) belongs to the path from ~ to r and 0 otherwise
129

Formulation
minimize _'LWEIGHTa L GAPJ x; a {(i,j):EXTST;J =I}
s.t.
-1 if i =sa 1 if i = r
+ _'LCONSTx; {(a,c,d,i,j):ce¢", } ie(0~orA~),EXJSTij=l
'V a, i
0 otherwise
'V a, d, and c E <1>0
"X~UCOM _ ""'X~ENTCOM 2:: Q Tj i E r ~ lj ~ lj
~:EXTST;fUCOM =I} ~:EXTSTijCENTCOM =I}
Ix; + Ix; :::; 1 'V a, s, andp ~i,j):ieLf ,EXTST;j =I} ~i,j):ieE~ ,EXTST;j =I}
Ix; + _'Lx; :::; 1 . 'V a, de {1, ... ,D-1}, and c e <1>0
~i,j):ieA~,EXTSTu~ =I} ~i,j):ie0~ ,EXTSTij =I}
(VI.l.a)
(VI.l.b)
(VI.l.c)
(VI.1.d)
(VI.l.e)
(VI.l.f)
Ix; + Ix; :::;1 'V a, de(!l c and {2, ... ,D} ), and c e <1>0 (VI.l.g) ~i,j):ieA~-l ,EXTSTu~ =I} ~i,j):ieA~ ,EXTSTu~ =I}
Ix; + _'Lx; :::; 1 'V a, de(!l c and {1, ... ,D-1} ), and c e <1>0 (VI.l.h)
ki,j):ie0~ ,EXTSTu~ =I} ki,j):iee:+l ,EXTSTij =I}
130

fu the above formulation, the objective is to minimize the weighted coverage gaps
in CENTCOM and EUCOM with a very small penalty assessed for shifted maintenance
schedules. The optimization model employs a weighting scheme that accentuates
CENTCOM coverage more than EUCOM so as to generate deployment schedules in
which LANTFLT carriers provide approximately 24% ofCENTCOM coverage.
Constraint (VI.l. b), a flow balance constraint, ensures that there is a path from sa
to ya . Constraint (VI.1.c) ensures that at most one schedule is selected from each
deployable period. Constraint (VI.1.d) ensures that the same schedule is selected, if it
covers both AORs. Constraint (VI.1.e) ensures that the dry docking or refueling capacity
of shipyard s is not exceeded. Constraint (V1.1.f) ensures that a maintenance period is
shifted in one direction only (i.e., a maintenance period cannot start one month late and
simultaneously end one month early).
Constraint (VI.1.g) ensures that a carrier cannot be deployed in deployable period
d that was obtained from a non-deployable period, and at the same time deployed in a late
deployment schedule of period (d-1). If we deploy a carrier in a late deployment schedule
of period (d-1), then this will preclude deployment in period d. Therefore, a late
deployment in (d-1) is mutually exclusive with any deployment in d. Constraint (V1.1.h)
ensures that a carrier cannot simultaneously be deployed in deployable period d that was
obtained from a non-deployable period, and in an early deployment schedule of period
(d+l).
131

E. NEW FORMULATION: DECOUPLING DEPLOYABLE PERIODS
The new formulation introduced in this section is conceptually similar to the
classical set partitioning formulation for ship scheduling problems that is presented in
Chapter I, Section A.3. However, unlike the classical approach, an alternate schedule
does not involve the period-by-period status of the carrier for the entire planning horizon.
Each carrier's planning horizon is decoupled into its deployable periods, and possible
deployment schedules are generated for each of these deployable periods.
The algebraic formulation of the new formulation is as follows:
Indices:
c carriers
a AORs (CENTCOM, EUCOM)
d deployable periods (1, 2, ... , D-1, D)
t periods (1, .. . ,1)
s dry docking or refueling shipyards (Newport News, Puget Sound, and
Norfolk).
p critical maintenance period pairs (i.e., maintenance periods that
will overlap more than the allowable dry docking, refueling, or man-day
availability limits when shifted towards each other).
set of possible schedules for deployable period d of carrier c (i.e.,
schedules that satisfy the operations and maintenance constraints, and
provide the period-by-period status of this carrier for deployable period d).
132

Index Maps:
e~ = {j: schedule j belongs to early deployments of period d of carrier c}
A~ = {j: schedule j belongs to late deployments of period d of carrier c}
K = { d: period d of carrier c is obtained as deployable by shifting
maintenance periods}
E: = {j: schedule} belongs to early deployments of the deployable period right
after the second element of critical maintenance period pair p ( i.e., the
maintenance period which starts later) for shipyards}
L~ = {j: schedule} belongs to late deployments of the deployable period right
before the first element of critical maintenance period pair p ( i.e. the
maintenance period which starts earlier) for shipyards}
Data:
A;; equals 1 if schedule j E J; covers AOR a in period t, 0 otherwise
WEIGHT a weight of coverage in AOR a
MAXGAP maximum allowable number of consecutive uncovered periods in an
AOR
Decision Variables (Binary)
xj equals 1 if schedule j is selected, 0 otherwise
uncovered; equals 1 if AOR a is not covered in period t, 0 otherwise
133

Formulation
minimize IWEIGHT0 uncovered; a,j
s.t.
L A;;xj +uncovered;~ 1 c,d,j
t+(MAXGAP-1)
I uncovered; ~(MAXGAP -1) t'=t
Ixj+ I xj ~1 jeL~ jeEf
I xj+ I xj ~1 jeA~ je0~
I xj+ Ixj ~1 jeA~-l jeA~
I xj+ L xj ~1 je0~ je0d+l
(VI.2.a)
V c,d (V1.2.b)
V a, t (VI.2.c)
V a, t e {1, ... , T- (MAX GAP -1)} (VI.2.d)
V s, and p (VI.2.e)
V c, de {l, ... ,D-1} (VI.2.f)
V c, de(/1 c and {2, ... ,D}) (VI.2.g)
V c, de(/1 c and {1, ... ,D-1}) (VI.2.h)
In the above formulation, the objective is to minimize the uncovered periods in
each A OR. Partition constraints (VI.2.b) ensure that exactly one schedule is selected for
each deployable period. Constraints (VI.2.c) express that each AOR should be covered in
each period. Because covering all AORs is not possible with the current carrier force,
134

this constraint is elasticized using a penalized elastic variable for each uncovered period.
Packing constraints (VI.2.d) ensure that the uncovered period for each AOR is no more
than the maximum allowable number of gap periods ( MAXGAP ).
Constraints (V1.2.e) ensure that the dry docking or refueling capacity of shipyards
is not exceeded. Constraints (VI.2.f) ensure that a maintenance period is shifted in one
direction only (i.e., a maintenance period cannot start one month late and simultaneously
end one month early). Constraints (VI.2.g) ensure that a carrier cannot be deployed in
deployable period d that was obtained from a non-deployable period, and at the same time
deployed in a late deployment schedule ofperiod (d-1). Constraints (VI.2.h) ensure that a
carrier cannot simultaneously be deployed in deployable period d that was obtained from
a non-deployable period, and in an early deployment schedule of period (d+ 1).
Notice that constraints (VI.2.b ), (VI.2.d), (VI.2.f), (VI.2.g) and (VI.2.h) have
exactly one segment of consecutive ones in each row, while constraints (VI.2.e) have two.
Each constraint of (VI.2.c) has segments of consecutive ones in its rows, as well as in its
columns. In practice, the number of segments of ones in constraints (VI.2.c) are no more
than five in each row, representing that at any period of time at most four carriers are
available for coverage of each AOR (plus one segment for the elastic variable uncovered).
Additionally, the number of consecutive ones segments is no more than three in each
(V1.2.c) column. Because a LANTFLT carrier may cover more than one AOR for each
deployable period, there are three segments in each associated column.
135

F. COMPARISON OF FORMULATIONS
Table VI.3 presents the problem size comparison of the two-commodity network
model with side constraints, and the new decoupled set partitioning formulation
introduced in the previous section.
Two-Commodity Network New Formulation: Decoupling
with Side Constraints Deployable Periods
Scenario and Number of Number of Number of Number of
Time Fidelity Constraints Columns Constraints Columns
Shifted Maintenance (VI.l.b) 1,600 (VI.2.b) 50
Four-week Periods (VI.l.c) 50 (VI.2.c) 1,046
(VI.l.d) 437 (VI.2.d) 1,028
(VI.l.e) 5 (VI.2.e) 5
(VI.l.f) 50 (VI.2.f) 50
(VI.l.g) 9 (VI.2.g) 9
(VI.l.h) 9 (VI.2.h) 9
Total 2,160 45,675 2,197 1,918
Shifted Maintenance (VI.l.b) 14,979 (VI.2.b) 50
One-week Periods (VI.l.c) 50 (VI.2.c) 1,046
(VI.l.d) 4,074 (VI.2.d) 1,028
(VI.l.e) 5 (VI.2.e) 5
(VI.l.f) 50 (VI.2.f) 50
(VI.l.g) 9 (VI.2.g) 9
(VI.l.h) 9 (VI.2.h) 9
Total 19,176 2,282,015 2,197 9,210
Fixed Maintenance (VI.l.b) 4,739 (VI.2.b) 41
One-week Periods (VI.l.c) 41 (VI.2.c) 1,046
(VI.1.d) 1,289 (VI.2.d) 1,028
Total 6,078 258,490 2,115 3,629
Table VI.3. Problem Size Comparison of the Two-Commodity Network Model with Side Constraints and the New Formulation: Decoupling Deployable Periods. The
two formulations are compared in the context of three scenarios using the ten-year PERA
CV schedule data taken from OPNAV Report 4710 [1996a] for twelve carriers. In the
shifted maintenance scenarios, the optimization model is allowed to advance or delay the
maintenance periods at most four weeks to obtain better coverage percentages. By
contrast, in the fixed maintenance scenario, coverage is maximized around fixed
maintenance availabilities. Four-week (or one-week) periods indicate that a carrier may
be scheduled to deploy at the beginning of every four-week (or one-week) interval. The
number of rows specified for each constraint type is provided next to the associated
equation numbers.
136

To date, the two-commodity network with side constraints model has been
implemented for the aircraft carrier scheduling problem using a time resolution of four
weeks. That is, a carrier may be scheduled to deploy at the beginning of every four-week
interval. The reason for restricting with a four-week time resolution is to render the
scheduling problem computationally tractable. However, our computational results on
the PERA CV scheduling data for twelve carriers and fixed maintenance periods show
that if the time resolution is defined in weeks (a relaxation), then the coverage percentage
in CENTCOM AOR increases 1.88% or ten carrier weeks. Considering the cost of
carrier operations and the desire to maximize coverage in the AORs, such a percentage
increase is significant.
Table VI.3 shows that if the time resolution of the aircraft carrier scheduling
problem is defined in weeks, the two-commodity network model with side constraints
becomes very difficult to solve for even the most basic fixed maintenance scenario.
However, the new decoupled set partitioning formulation generates reasonable problem
sizes that can be solved efficiently in all scenarios.
Another disadvantage of the two-commodity network model with side constraints
is the restriction that the CENTCOM coverage by LANTFLT carriers lasts six weeks.
This assumption has been made to reduce the number of possible schedules, and to make
the scheduling problem solvable. However, using the new decoupled set partitioning
formulation, the number of weeks a LANTFLT carrier should cover CENTCOM can be
determined by the optimization. This flexibility will increase the coverage in both AORs,
and still generate a reasonable problem size.
137

Finally, we note that the LP relaxation lower bound obtained using the classical
set partitioning model is stronger than the respective LP relaxation lower bound obtained
using the two-commodity network model with side constraints, or the new decoupled set
partitioning formulation. When we relax the respective binary requirements in the two
commodity network model with side constraints or in the new decoupled set partitioning
formulation, the mutually exclusive packing constraints (VI.l.e) through (VI.l.h), and
(VI.2.e) through (V1.2.h) admit fractional (non-binary) alternate schedules with non
uniform values adding to at most one. Although the decoupled set partition yields a
weaker LP relaxation lower bound, it has proven effective for solving the carrier
scheduling problem because, even over a long planning horizon, the number of alternate
schedules remains modest.
138

VII. CONCLUSIONS, CONTRIBUTIONS, AND RECOMMENDED FUTURE RESEARCH
Set partitioning problems arise m many applications of optimization-based
decision support. Perhaps the best-known of these is airline crew scheduling, where each
binary decision (syn. "variable," or "column") represents whether or not to assign a crew
to a duty period consisting of a set of (takeoff-to-landing) flights, and each constraint
(row) is a flight that must have a crew assigned. These models are deceptively easy to
state: find a set of columns that make exactly one (crew) assignment to each row. But,
these problems are quite difficult to solve. Even the continuous, linear programming
relaxation is not necessarily easy to solve, and even when it has been solved, there are
frequently many variables in the solution with fractional values, so that enumeration with
branch-and-bound or branch-and-cut becomes necessary.
Just getting a feasible solution for a set partition, let alone an optimal or near-
optimal one, is hard. fu fact, even having a bound on such a solution can be a valuable
clue about how to actually solve it.
fu this dissertation we have isolated a special structure exhibited by set partitions
that we call "consecutive ones." A consecutive ones column in an airline crew
scheduling problem assigns a consecutive set of flights, and a consecutive ones row is
associated with a flight that can be assigned to a consecutive set of candidate columns.
Set partitions with consecutive ones columns can be reformulated into an equivalent
minimum-cost pure network flow problem, and thus solved easily. Consecutive ones
139

rows also yield an easy reformulation that is the dual of a minimum-cost pure network
flow problem.
However, finding a set partition that has all consecutive ones rows or columns is a
lucky and rare event. Predominately, we find columns or rows composed of more than
one consecutive ones segment. If the number of consecutive ones segments per column
or row is small, we call this "near-consecutive ones."
We have looked for, and found, intrinsic near-consecutive ones rows and/or
columns in many existing set partitions. We have shown how to reorder columns and/or
rows to minimize the respective number of consecutive ones segments in rows and/or
columns. We have also formulated set partitions, in particular a long-term US Navy
aircraft carrier deployment scheduling model, with the aim of minimizing the number of
consecutive ones segments in its rows and/or columns.
Having found near-consecutive ones columns, and perhaps having reduced the
number of segments in them, we show how to algebraically reformulate, or "column
split" the set partition into two sets of rows with some additional columns such that one
set of rows has only consecutive ones columns. We show how each of these row sets is,
individually, equivalent to a pure network flow problem, so each is easy to solve quickly.
However, directly solving both sets simultaneously is not easy, so we retain the larger set
of network constraints and use Lagrangian relaxation with subgradient optimization to
attempt to satisfy the smaller set of network constraints by iterative means. This use of
column splitting has been suggested before for solving some special problems, such as
the two-duty period scheduling problem [Marsten and Shepardson 1980], but never
140

reported for general set partitions. Our results show that it is important not to have too
many consecutive ones column segments, or it becomes very difficult to solve the
Lagrangian relaxation in a reasonable amount of time. Even in cases where a set partition
cannot be solved this way, the solution can be bounded, however.
We also find near-consecutive ones rows, and perhaps reduce the number of
segments in these, and show how to use this perspective to reformulate the set partition
into two sets of columns with some additional rows. One set of columns has only
consecutive ones rows. We show how each of these column sets is, individually,
equivalent to a pure network flow problem. We also show that if the variables in one set
are fixed, the remaining set conditioned by this can be solved easily. We use this to
develop the row split Benders decomposition method to solve set partitions. The results
show that is important not to have too many consecutive ones row segments, or the
number of Benders iterations required for convergence grows alarmingly. Even in cases
where a set partition cannot be solveq with row split Benders decomposition, the solution
can be bounded.
We do find cases where the column split and/or row split methods solve the set
partition faster than conventional means. We conjecture that, given the difficulty of
solving set partitions, there exist instances that these new techniques will solve that
would defy conventional means.
It is well known that linear programs and mixed integer linear programs (and set
partitions) usually exhibit redundant features that can be easily detected and exploited by
relaxing constraints and fixing variables. For instance, if a constraint restricts a set of
141

binary variables to sum to one, and if another constraint restricts that same set of
variables and another set of binary variables to also sum to one, then the latter set of
variables can all.be set to zero, and the latter constraint can be relaxed. These detection
features, called "presolve," "prereduce," or "preprocessing," are standard features in
commercial optimization software packages and are well known to improve solution
efficiency, sometime~ dramatically.
There are also well known reductions applicable to pure network flow problems.
Finding that set partition features can be reformulated to equivalent network flow features
suggests that for every reduction applicable to a set partition, there might be. some
equivalent reduction in the equivalent pure network, and vice versa. We establish
equivalence between pairs of set partition and network reductions, and discover that some
that have been reported to be distinct are not. We also discover a new set partition
reduction from a known network reduction.
A. CONTRIBUTIONS
1. Column Splitting
We have investigated Lagrangian relaxation and subgradient optimization with the
column split reformulation for various problems including: (i) an instance of an aircraft
carrier problem, (ii) sample data from two-, three-, and four-duty period problems, and
(iii) a subset of real-world airline crew scheduling problems that exhibits a reasonable
degree of consecutive ones structure in the columns. During the implementation of
subgradient optimization, some of the recent improvements reported by Caprara et al.
[1999) are incorporated.
142

For airline crew scheduling problems that do not have a significant consecutive
ones structure, the convergence of Lagrangian relaxation is unsatisfactory. However, for
instances of two-, three-, and four-duty scheduling scenarios, the Lagrangian relaxation
yields a respectable lower bound faster than the LP relaxation of the monolithic SPP.
But, obtaining a lower bound within 1% of the LP relaxation lower bound using
Lagrangian relaxation usually requires an excessive number of iterations and long
solution times. As the number of segments of consecutive ones increases, the
convergence speed of Lagrangian relaxation deteriorates.
We have also investigated an exterior penalty method on the column split
reformulation to find a lower bound that is equal to the LP relaxation of SPP. Our
penalty subproblem is a convex quadratic network flow problem. We have implemented
our penalty method using the CPLEX 6.6 [ILOG 2000] quadratic programming solver,
which is not specially designed for solving quadratic network flow problems.
For certain problems with near-consecutive ones, our exterior penalty method
yields lower bound values faster than the conventional means, including the simplex, dual
simplex, or barrier methods. A specialized quadratic network solver (e.g., that reported
by Dembo [1987] and Hearn et al. [1987] but not available from those authors) would
presumably improve solution times further.
By reordering the rows, we may reduce the number of consecutive ones segments
in the columns of an SPP: using a trivial row reordering heuristic on a subset of airline
crew scheduling problems, we obtain a 32% average decrease in the number of
consecutive ones segments. Furthermore, after reordering the rows, the solution times
143

and the lower bound values obtained using the Lagrangian relaxation and the penalty
method improve significantly. For one of the sample problems, we obtain a better
solution time using the exterior penalty method than solving the original LP relaxation
using the simplex method.
2. Row Split Benders Decomposition
We have introduced a new algorithm to solve certain binary programming
problems (e.g. set partitions, their cousins set packs and set covers, and instances of these
with additional side constraints) whose rows contain segments of consecutive ones. We
reformulate using a row splitting technique that isolates a pure network enabling
application ofBenders decomposition.
For some problems with near-consecutive ones in rows (e.g., the aircraft carrier
scheduling problem), the row split Benders decomposition yields faster solution times.
We conjecture that row split Benders decomposition will render some previously
unsolvable real-world applications tractable.
Further, we have investigated the impact of column reordering on the performance
of the row split Benders decomposition.
We have also tested the performance of the row split Benders decomposition in
generating improved feasible solutions for an SP, SC or SPP.
By reordering the columns of a subset of airline crew scheduling problems with a
simple heuristic, we obtain a 48% average decrease in the number of segments of
consecutive ones. Furthermore, after reordering the columns, the solution times and the
bound values obtained using row split Benders decomposition improve significantly
144

improve. For one of the SP samples, we obtain a better solution time using the row split
Benders decomposition than solving the original integer program using CPLEX 6.6
[ILOG 2000].
In general, the convergence rate of the row split Benders decomposition degrades
as the number of consecutive ones segments increases.
3. Reductions In SPP
We have compared known preprocessing reductions for SPPs with known
reductions for network flow models extracted from our column split reformulation, and
have used the reformulation to establish one-to-one correspondence between reductions
heretofore viewed as distinct.
While doing this, we have discovered a new "column split" reduction for SPP.
Applying this to a well-studied set of airline crew scheduling SPPs, we identify relations
between binary variables that lead to fixing many more of those variables than any
preceding work. Moreover, finding so many new reductions may improve the solution
time and/or allow some unsolvable real-world SPPs to be solved.
We have also discussed extracting the hidden arcs of the intersection graph of an
SPP by probing variables. We note that extending the intersection graph with the
addition of new arcs generated by naYve probing may offer new valid inequalities for SPP.
However, extracting the hidden arcs of the intersection graph by probing, and finding
valid inequalities in the extended intersection graph may be computationally very
expensive.
145

4. A New Formulation For A Long-Term Aircraft Carrier Scheduling Problem
We have introduced a new SPP-with-side-constraints formulation for a well-
known aircraft carrier deployment scheduling problem. This new formulation
significantly reduces problem size, and admits an improvement in time fidelity from
months to weeks over a ten-year planning horizon. We use US Navy data for twelve
carriers and fixed maintenance periods and show that, if the time resolution is defmed in
weeks, the percentage of time we can patrol in areas of responsibility increases 1.88% or
ten carrier weeks. Considering the enormous cost of carrier operations and the goal of
maximizing such coverage, this is a significant improvement.
B. RECOMMENDATIONS FOR FUTURE RESEARCH
There are several avenues for further research that may prove fruitful.
1. Augmented Lagrangian Penalty Method
For a sufficiently large penalty parameter, the penalty method presented in
Chapter III converges to the LP relaxation lower bound. However, if we choose too large
a parameter, the penalty method may not converge to the optimal solution because of the
ill conditioning we have induced. For certain problems, even if we iteratively increment
the penalty parameter value, convergence may not occur. For such problems, we
recommend investigating the augmented Lagrangian penalty method (e.g., [Bertsekas
1995]). This method is theoretically guaranteed to achieve an exact optimum for finite
penalty parameter values.
146

2. Further Investigation Of The Column Split Reduction
We have only applied the new column split reduction to the initial linear program
relaxation, i.e., at the root node of the subsequent branch-and-bound tree. We
recommend applying this reduction periodically during branch-and-bound, and conjecture
that it will enhance such reductions at little computational cost.
(NS)
3. A Variant Of The Simplex Method
Consider the reformulated problem (NS).
minimize dy
s.t. !Ny=b
Sy=O
y binary
Note that the optimal solution to (NS) is an extreme point of the following integral
polyhedron P:
We have sought a restriction of the simplex method that searches for a feasible
solution to (NS) by moving from one basic feasible solution to another, along the edges of
P, always in a cost reducing direction. That is, we search for an extreme point of P that
also satisfies constraints Sy = 0. It requires exponential time (i.e., the time needed to
implement an algorithm is an exponential function of the length ofthe input data) to find
such an extreme point. It remains to be seen whether a heuristic search method is
worthwhile.
147

4. Fictitious Play
Consider the reformulated problem (NS). We define the Lagrangian by:
L(y,Jl) = {dy+ .u(Sy): .5\Y = b,y binary}
Consider the following game: player 1 chooses some y ;::: 0, and player 2 chooses
some .u; then, player 1 pays to player 2 the amount L(y,.u). Player 1 would like to
minimize L(y, .u) , while player 2 would like to maximize it.
A pair (y ·, .u ·) , with y • ;::: 0 , is called an equilibrium point (or a saddle point, or a
Nash equilibrium) if
V y;::: 0, and .u
(Thus we have an equilibrium if no player is able to improve her performance unilaterally
modifying her choice.)
We have experimented withfictitious play (e.g., [Brown 1951], and [Gass et al.
1996]) to try to solve the game described above. Even if we cannot solve this game, we
can still obtain lower or upper bounds for SPP. And, we could not solve this game: The
convergence rate of fictitious play is very slow compared to the Lagrangian relaxation.
148

LIST OF REFERENCES
Ahuja, R.K., Magnanti, T.L. and Orlin, J.B. 1993, Network Flows, Prentice Hall, Englewood Cliffs, New Jersey.
Ali, A.I. and Thiagarajan, H. 1989, "A Network Relaxation Base Enumeration Algorithm for Set Partitioning Problem," European Journal of Operational Research, 38, pp. 76-89.
Ali, A.I., Han, H.S. and Kennington, J.L. 1995, "Use of Hidden Network Structure in the Set Partitioning Problem," in: Integer Programming and Combinatorial Optimization, editors: Balas E., Clausen, J., Springer LNCS 920, pp. 172-184.
Appelgren, L.H. 1969, "A Column Generation Algorithm for a Ship Scheduling Problem," Transportation Science, 3, pp. 53-68.
Appelgren, L.H. 1971, "Integer Programming Methods for a Vessel Scheduling Problem," Transportation Science, 5, pp. 64-78.
Atamturk, A., Nemhauser, G.L. and Savelsbergh, M.W.P 1995, "A Combined Lagrangian, Linear Programming, and Implication Heuristic for Large-Scale Set Partitioning Problems," Journal of Heuristics, 1, pp. 247-259.
Avis, A. 1980, "A Note on Some Computationally Difficult Set Covering Problems," Mathematical Programming, 18, pp. 135-143.
Ayik, M. 1998, "Optimal Long-Term Aircraft Carrier Deployment Planning with Synchronous Depot Level Maintenance Scheduling," M.S. Thesis in Operations Research, Naval Postgraduate School, Monterey, California (March).
Baker, K.R. 1976, "Workforce Allocation in Cyclical Scheduling Problems," Operational Research Quarterly, 27, pp. 155-167.
Balas, E. and Padberg, M.W. 1976, "Set Partitioning: A Survey," SIAM Reviev, 18, pp. 710-760.
Bartholdi, J.J. III, Orlin, J.B. and Rattlif, H.D. 1980, "Cyclic Scheduling via Integer Programs with Circular Ones," Operations Research, 28, pp. 1074-1085.
Bausch, D.O., Brown, G.G. and Ronen D. 1995, "Consolidating and Dispatching Truck Shipments of Mobil Heavy Petroleum Products," Interfaces, 25, pp. 1-17.
Bausch, D.O., Brown, G.G. and Ronen D. 1998, "Scheduling Short-Term Marine Transport of Bulk Products," Maritime Policy Management, 25, pp. 335-348.
149

Bazaraa, M.S., Sherali, H.D. and Shetty, C.M. 1993, Nonlinear Programming Theory and
Applications (2nd Ed.), John Wiley & Sons, New York.
Beasley, J.E. 1987, "An Algorithm for Set Covering Problems," European Journal of
Operational Research, 31, pp.85-93.
Beasley, J.E. 1992, "Enhancing an Algorithm for Set Covering Problems," European
Journal of Operational Research, 58, pp. 293-300.
Beasley, J.E. and Chu, P.C. 1996, "A Genetic Algorithm for the Set Covering Problem,"
European Journal of Operational Research, 94, pp. 392-404.
Benders, J.F. 1962, "Partitioning Procedures for Solving Mixed Variables Programming
Problems," Numerische Mathematik, 4, pp. 238-252.
Bertsekas, D.P. 1995, Nonlinear Programming, Athena Scientific, Belmont,
Massachusetts.
Bertsimas, D. and Orlin, J.B. 1991, "A Technique for Speeding up the Solution of the
Lagrangian Dual," Working Paper OR 248-91, Operations Research Center, MIT,
Cambridge, Massachusetts.
Bertsimas, D. and Tsitsiklis, J.N. 1997, Introduction to Linear Optimization, Athena
Scientific, Belmont, Massachusetts.
Bradley, G., Brown, G.G. and Graves, G. 1975, "GNET: A Computer Program for
Solution of Capacitated Pure Network Problems," Copyright 1975, 1989.
Brown, G.W. 1951, "Iterative Solution of Games by Fictitious Play," in: Activity Analysis
of Production and Allocation, editor: Koopmans, T.C., John Wiley & Sons, New York,
pp. 374-376.
Brown, G.G. and Thomen, D. 1980, "Automatic Identification of Generalized Upper
Bounds in Large-Scale Optimization Models," Management Science, 26, pp. 1166-1184.
Brown, G.G. and Wright W. 1984, "Automatic Identification of Embedded Network
Rows in Large-Scale Optimization Models," Mathematical Programming, 29, pp. 41-46.
Brown, G.G., Mcbride, R. and Wood, R.K. 1985, "Extracting Embedded Generalized
Networks in Large-Scale Optimization Models," Mathematical Programming, 32, pp. 11-
31.
Brown, G.G., Graves, G.W. and Ronen, D. 1987, "Scheduling Ocean Transportation of
Crude Oil," Management Science, 33, pp. 335-346.
150

Brown, G.G., Graves, G.W. and Honczarenko, M.D. 1987, "Design and Operation of a Multicommodity Production/Distribution System using Primal Goal Decomposition," Management Science, 33, pp. 1469-1480.
Brown, G.G., Goodman, C.E. and Wood, R.K. 1990, "Annual Scheduling of Atlantic Fleet Combatants," Operations Research, 38, pp. 249-259.
Brown, R.L., Lawphongpanich, S., Looney, R., Schrady, D., Wirtz, J. and Yost, D. 1997, "Forward Engagement Requirements for U.S. Naval Forces: New Analytical Approaches," Technical Report Prepared for Deputy Chief of Naval Operations (Resources, Warfare Requirement and Assessment) N-8, Office of the Chief of Naval Operations, Washington, DC.
Brown, R.L. 1998, Telephone Conversation with the ~Janning and ;Engineering for Repairs and Alterations Activity for the Aircraft Carriers (PERA CV), January.
Brownell, W.S. and Lowerre, J.M. 1976, "Scheduling of Workforce Required for Continuous Operation under Alternative Labor Policies," Management Science, 22, pp. 597-605.
Camp, G.D. 1955, "Inequality-Constrained Stationary-Value Problems," Operations
Research, 3, pp. 548-550.
Caprara, A., Fischetti, M. and Toth, P. 1999, "A Heuristic Method for The Set Covering Problem," Operations Research, 7, pp. 730-743.
Chames, A. and Miller M.H. 1956, "A Model for the Optimal Programming of Railway Freight Train Movements," Management Science, 3, pp. 74-92.
Christofides, N. and Korman, S. 1975, "A Computational Survey of Methods for the Set Covering Problem," Management Science, 21, pp. 591-599.
Compaq Visual Fortran 1999, A Programming Language, Compaq Computer Corporation, Kingston, New York.
Cook, W., Cunningham, W., Pulleyblank, W. and Schrijver, A. 1998, Combinatorial
Optimization, John Wiley & Sons, New York.
Crawford, J.L. and Sinclair, G.B. 1977, "Computer Scheduling of Beer Tanker Deliveries," International Journal of Physical Distribution, 7, pp. 294-304.
Crowder, H., Johnson, E.L. and Padberg, M. 1983, "Solving Large-Scale Zero-One Linear Programming Problems," Operations Research, 31, pp. 803-834. I
151

Dembo, R.S. 1987, "A Primal Truncated Newton Algorithm with Application to Large
Scale Nonlinear Network Optimization," Mathematical Programming Study, 31, pp. 43-
71.
Department of the Navy 1994, Naval Doctrine Publication 1 (NDP 1): Naval Warfare,
Naval Doctrine Command, Norfolk, Virginia.
Eben-Chaime, M., Tovey, C.A. and Ammons, J.C. 1996, "Circuit Partitioning via Set
Partitioning and Column Generation," Operations Research, 44, pp. 65-76.
El-Darzi, E. and Mitra, G. 1990, "Set Covering and Set Partitioning: A Collection of Test
Problems," Omega International Journal of Management Science, 18, pp. 195-201.
Fiacco, A.V. and McCormick, G.P. 1968, Nonlinear Programming: Sequential
Unconstrained Minimization Techniques, John Wiley & Sons, New York.
Fisher, M.L. 1981, "The Lagrangian Relaxation Method for Solving Integer Programming
Problems," Management Science, 27, pp. 1-18.
Fisher, M.L. 1985, "An Applications Oriented Guide to Lagrangian Relaxation,"
Interfaces, 15, pp. 10-21.
Fourer, R., Gay, D.M. and Kernighan, B.W. 1999, AMPL: A Modeling Language for
Mathematical Programming, Scientific Press, Danvers, Massachusetts.
Garey, M.R. and Johnson, D.S. 1979, Computers and Intractability, W.H. Freeman and
Company, New York.
Garfinkel, R.S. and Nemhauser, G.L. 1970, "Optimal Political Districting by hnplicit
Enumeration Techniques," Management Science, 16, pp. B495-B508.
Garfinkel, R.S. and Nemhauser, G.L. 1972, Integer Programming, John Wiley & Sons,
New York.
Gass, S.I., Za:fra, P.M.R. and Qiu, Z. 1996, "Modified Fictitious Play," Naval Research
Logistics, 43, pp. 995-970.
Geoffrion A.M. 1974, "Lagrangian Relaxation for Integer Programming," Mathematical
Programming Study, 2, pp. 82-114.
Grossman, T. and Wool, A. 1997, "Computational Experience with Approximation
Algorithms for the Set Covering Problem," European Journal of Operational Research,
101, pp. 81-92.
Haddadi, S. 1997, "Simple .Lagrangian Heuristic for the Set Covering Problem,"
European Journal of Operational Research, 97, pp. 200-204.
152

Hearn, D.W., Lawphongpanich, S. and Ventura, J.A. 1987, "Restricted Simplicial Decomposition: Computation and Extensions," Mathematical Programming Study, 31,
pp. 99-118.
Held M. and Karp, R.M. 1970, "The Traveling Salesman and Minimum Spanning Trees," Operations Research, 18, pp. 1138-1162.
Held M. and Karp, R.M. 1971, "The Traveling Salesman and Minimum Spanning Trees, Part II," Mathematical Programming, 1, pp. 6-25.
Hochbaum, D.S. 1993, "Polynomial and Strongly Polynomial Algorithms for Convex Network Optimization," in: Network Optimization Problems, World Scientific Publishing Company, River Edge, New Jersey, editors: Du, D.-Z., Pardalos, P.M., pp. 63-92.
Hoffman, A.J. and Kruskal, J.B. 1956, "Integral Boundary Points of Convex Polyhedra," in: Linear Inequalities and Related Systems, editors: Kuhn, H.W., Tucker, A.W., Princeton University Press, Princeton, pp. 223-246.
Hoffman, K.L. and Padberg, M. 1993, "Solving Airline Crew Scheduling Problems by Branch-and-Cut," Management Science, 39, pp. 657-682.
ILOG 2000, !LOG CPLEX 6.6 Reference Manual, ILOG Ltd., Gentilly Cedex, France.
Lawler, E.L., Lenstra J.K., Rinnooy Kan, A.H.G. and Shmoys, D.B. 1985, The Traveling Salesman Problem: A Guided Tour of Combinatorial Optimization, John Wiley & Sons, New York.
Lenstra, J.K. and Rinnooy Kan, A.H.G. 1979, "Computational Complexity of Discrete Optimization Problems," Annals of Discrete Mathematics, 4, pp. 121-140.
Marsten, R.E. 1974, "An Algorithm for Large Set Partitioning Problems," Management
Science, 20, pp. 191-209.
Marsten, R.E. and Shepardson, F. 1980, "A Lagrangean Relaxation Algorithm for the Two-Duty Period Scheduling Problem," Management Science, 26, pp. 274-281.
Nemhauser, G.L. and Weber, G.M. 1979, "Optimal Set Partitioning, Matchings and Lagrangian Duality," Naval Research Logistics, 26, pp. 553-563.
Nemhauser, G.L. and Wolsey, L.A. 1988, Integer and Combinatorial Optimization, John Wiley & Sons, New York.
OPNA V 1990, Personnel Tempo of Operations, Instruction 3000.13A, Office of the Chief ofNaval Operations, Washington, DC.
153

OPNAV 1992, Maintenance Policy for Navy Ships, Instruction 4700.7J, Office of the
Chief of Naval Operations, Washington, DC.
OPNAV 1996a, Aircraft Availability Schedule, Report 4710, The £lanning and
;Engineering for Repairs and Alterations Activity for the Aircraft Carriers (PERA CV),
Bremerton, Washington.
OPNAV 1996b, Notional Intervals, Durations, Maintenance Cycles, and Repair
Mandays for Depot Level Maintenance Availabilities of U.S. Navy Ships, Notice 4700,
Office of the Chief of Naval Operations, Washington, DC.
OR Library 2000, Set Partitioning Problems, online test data set sited at URL:
"http :1/mscmga. ms. ic. a c. ukljebl orlib/sppinfo. html," presented by Beasley, J .E.
Parker, R.G. and Rardin, R.L. 1988, Discrete Optimization, Academic Press, San Diego,
California.
Pierce, J.F. 1970, "Pattern Scheduling and Matching in Stock Cutting Operations," Tappi,
53, pp. 668-678.
Pietrgykowski, T. 1962, "Application of the Steepest Descent Method to Concave
Programming," Proc. Of International Federation Processing Societies Congress
(Munich), North Holland, Amsterdam, pp. 185-189.
Poljak, B.T. 1967, "A General Method of Solving Extremum Problems," Doklady
Akademmi Nauk SSSR 174 (1), pp. 33-36.
Rockafellar, R.T. 1970, Convex Analysis, Princeton University Press, Princeton, New
Jersey.
Savelsberg, M.W.P. 1994, ''Preprocessing and Probing Techniques for Mixed Integer
Programming Problems," ORSA Journal on Computing, 6, pp. 445-454.
Schauppner, C.T. 1996, "Optimal Aircraft Carrier Deployment Scheduling," M.S. Thesis
in Operations Research, Naval Postgraduate School, Monterey, California (March).
Schrage, L. 1997, Optimization Modeling with LINDO (51h Ed.), Brooks/Cole, Pacific
Grove, California.
Shapiro, J.F. 1979, Mathematical Programming: Structures and Algorithms, John Wiley
& Sons, New York.
Stoer, J., and Witzgall, C. 1970, Convexity and Optimization in Finite Dimensions,
Springer-Verlag, New York.
154

U.S. Navy 1998, "Carrier: Powerhouse of the fleet," online paper sited at the official website of the U.S. Navy in URL: "http:llwww.chifno.navy.mil/navpaliblallhands /ah0197/pg08-09.html," The Navy Office of Information, Washington, DC.
Veinott, J.A.F. and Wagner, H.M. 1962, "Optimal Capacity Scheduling-!," Operations Research, 19, 4, pp. 518-532.
Wing, V.F. 1986, "SURFSKED an Optimization Aid for Surface Combatant IntegerDeployment Scheduling," M.S. Thesis in Operations Research, Naval Postgraduate School, Monterey, California (September).
155

THIS PAGE INTENTIONALLY LEFT BLANK
156

INITIAL DISTRIBUTION LIST
1. Defense Technical Information Center .................................................................... 2 8725 John J. Kingman Road, Suite 0944 Ft. Belvoir, VA 22060-6218
2. Dudley Knox Library ............................................................................................... 2 Naval Postgraduate School 411 Dyer Road Monterey, CA 93943-5101
3. Professor Gerald G. Brown ...................................................................................... 2 CodeOR!Bw Naval Postgraduate School Monterey, CA 93943-5101
4. Associate Professor Robert F. De11 .......................................................................... 1 Code ORJDe Naval Postgraduate School Monterey, CA 93943-5101
5. Adjunct Professor Wayne P. Hughes ....................................................................... 1 CodeOR!Hl Naval Postgraduate School Monterey, CA 93943-5101
6. Professor Guillermo Owen ...................................................................................... 1 CodeOR!Bw Naval Postgraduate School Monterey, CA 93943-5101
7. Professor Richard E. Rosenthal ............................................................................... 1 Code OR!Rl Naval Postgraduate School Monterey, CA 93943-5101
8. Professor R. Kevin Wood ........................................................................................ 1 CodeOR!Wd Naval Postgraduate School Monterey, CA 93943-5101
157

90 Deniz Kuvvetleri Komutanligiooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooo5 Persone Daire Bsk.ligi Bakanliklar, Ankara, Turkiye
100 Melnnet Ayik ooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooo4 Kultur Maho, Bahceli Sok., Dilek Apt., No: 32, Daire: 5 Elazig, Turkiye
11. Deniz Harp Okulu Komutanligi 0 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 oo 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 01 Kutuphane, Tuzla, Istanbul, Turkiye, 81704
158



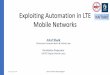




















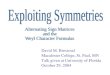




![Detecting and Exploiting Vulnerability in ActiveX Controlsfarsi]-detecting-and-exploiting... · Detecting and Exploiting Vulnerability in ActiveX Controls Shahriyar Jalayeri (Snake)](https://img.pdfslide.us/doc/110x75/5d142cfd88c993f1238cf355/detecting-and-exploiting-vulnerability-in-activex-controls-farsi-detecting-and-exploiting.jpg)