Embed Size (px)
Citation preview

Experiments on the Performance of a 2-DOF Pantograph RobotActuated by Shape Memory Alloy Wires
Yee Harn Teh and Roy FeatherstoneDepartment of Information Engineering
Research School of Information Sciences and EngineeringThe Australian National University
Canberra ACT 0200{yee.teh,roy}@rsise.anu.edu.au
Abstract
This paper describes a study of tracking speedand accuracy for a 2-DOF pantograph roboticdevice actuated by two antagonistic pairs ofelectrically-heated SMA wires. The objective isto investigate the coupling effect due to the ac-tuation of the two SMA pairs and the dynamicsof the pantograph device on the performance ofthe motion control system. Two different con-trollers, a two-stage relay controller and a mod-ified proportional controller, have been testedand compared, and experimental results arepresented in this paper. The relay controllerperforms satisfactorily in terms of speed of re-sponse, but the large limit cycle phenomenondegrades its accuracy. The modified propor-tional controller manages to reduce the limitcycle problem and its tracking speed is compa-rable with the relay controller. Experimentalresults will also show that the modified propor-tional controller may not be the best controllerfor this SMA-actuated pantograph device.
1 Introduction
1.1 BackgroundShape memory alloys (SMA) are a group of metallic al-loys that have the ability to return to a specific shapeor size prior to deformation via a temperature depen-dent phase change. When these alloys are in the low-temperature phase, the martensite phase, they can beeasily deformed. When they are heated through a suit-able range of temperatures, the crystal structures trans-form from martensite to austenite phase and they returnto the previous shape. This phase transformation pro-cess is known as the shape memory effect and forms thebasis of actuation in shape memory alloys.
SMA-based actuators have various uses in roboticresearch and applications including actuators in ac-tive endoscopes [Ikuta et al., 1988], robotic actuators
[Mosley and Mavroidis, 2001; Reynaerts and Van Brus-sel, 1998] and micro-actuators [Troisfontaine et al., 1998;Yao et al., 2004]. They have advantages in terms ofmechanical simplicity, high power-to-weight ratio, smallsize, and silent, spark-free operation. However, they arenot free from disadvantages such as inefficiency, limitedstrain, temperature hysteresis and slow speed. In theseapplications, the actuators are usually in the form ofone or more wires or coils. These SMA actuators aretypically coupled with a bias spring or weight to pro-vide actuation opposite to the contraction of the SMAelements, or arranged as antagonistic pairs. They arenormally heated by means of joule heating (i.e. passingan electrical current through the element), and cooledby heat transfer to the environment.
1.2 Problem StatementSMA actuators are generally considered to be slowand inaccurate due to their inherent thermal hystere-sis in the phase transformation. Various research anddevelopment have been made to improve the perfor-mance of SMA elements. In [Elahinia et al., 2004],a single degree-of-freedom (1-DOF) SMA-actuated armhad been used to develop variable structure controllersthat are highly accurate in tracking both stationaryand variable input signals. Grant [Grant, 1999] pro-posed the use of specially-constructed SMA coils in an-tagonistic arrangements using a two-stage relay con-troller to achieve relatively fast motion control of theactuators. By implementing a rapid heating mecha-nism in addition to Grant’s relay controller, we havemanaged to further improve the speed of actuationof SMA wire actuators [Featherstone and Teh, 2004;Teh and Featherstone, 2004]. In the second paper, weproposed using a modified proportional controller whichsuccessfully reduced the limit cycle which was problem-atic to a two-stage relay controller design. It should alsobe noted that these researches had been carried out toinvestigate the performance of SMA-actuators in 1-DOFrobots or mechanisms.
We propose using the controller designs we have imple-
1

(a)
(b)
(c)
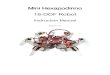
Figure 1: The experimental rig (a), and detailed viewsof the pulleys (b) and optical encoders (c).
mented in our previous research to investigate the perfor-mance of a 2-DOF pantograph robotic device actuatedby two antagonistic pairs of SMA wires. In such a 2-DOFrobot, factors such as the coupling effect of the SMA ac-tuators and the external payload due to the weight ofthe pantograph will affect the speed and accuracy of themotion control system.
1.3 OverviewWe have constructed a test rig that houses two antag-onistic pairs of SMA wires to actuate a 2-DOF panto-graph device. We have extended our motion control sys-tem from that described in [Featherstone and Teh, 2004;Teh and Featherstone, 2004] to control both pairs ofSMA elements using two different motion controllers.The experimental results are based on a planned trajec-tory which the tip of the pantograph device attempts totrack. This paper describes the experimental hardware,the principle of operation of our motion control system,and the experimental results from the motion controllerscomparing the performance between the two controllers.
2 Experimental Setup
2.1 Experimental HardwareThe experimental rig is shown in Figure 1(a) andschematically in Figure 2. It consists of a vertical steel C-beam, about 0.7m high, supporting two horizontal pro-truding shafts at the top and eight anchor points at thebottom. Each shaft at the top rotates freely on ball bear-ings and carries a small pulley at the front (Figure 1(b))
currentcommands
sensedSMA
voltage& current
encodersignals
PC
currentregulators
ADC DAC enc
dSPACEDS1104
Figure 2: Schematic diagram of experimental hardware.
and an optical encoder wheel at the rear (Figure 1(c)).The two shafts terminate with small sockets, welded tothe rear end of each shaft, which hold the ends of a pan-tograph linkage made from carbon tubes. This 2-DOFpantograph device serves as the moving robot as well asa mechanical load. In the experiments, the motion con-trol system attempts to move the tip of the pantographto follow certain trajectories, such as a circle or a square.
Separators made of paper are affixed half way up thecolumn to prevent the SMA elements from making elec-trical contact with their neighbours if they go slack. Ashort chord is wrapped around each pulley and is af-fixed so that it cannot slip relative to the pulley. Eachend of the chord terminates with a metal eyelet. Four100µm-diameter Flexinol wires are strung between theeight anchor points and the eyelets as shown in Figure 2to form two antagonistic pairs of SMA actuators. Thesewires are approximately 1 m long and are too thin to bevisible in Figure 1(a).
Figure 2 shows a schematic diagram of the completeexperimental setup. All real-time computation and datacapture functions are performed on a DS1104 board fromdSpace, which communicates with a PC in the MAT-LAB/Simulink environment. Current regulators deliverelectrical power to each SMA wire independently, ac-cording to signals from the four DAC outputs of theDS1104. Each regulator is capable of supplying morethan 0.65A (40W) to its load, which is more than enoughto burn out the SMA wires. The actual voltage acrosseach wire and the actual current passing through it canbe measured using the current regulator circuits, andthese signals are passed back to the ADC inputs on theDS1104.
The optical shaft encoders are also connected to theDS1104 to provide rotation angles of each pulley froman absolute position. Based on this setup, the motionrange of the pulley due to the actuation of Flexinol wiresis slightly more than 90◦.
2

motionsensors
motion controller
currentlimiters
currentregulators
Forward SMA Actuator
Reverse SMA Actuator
xd
I h1,
measured V, I
Id2
I d1,I h2
(t)
Trajectory Generator
Figure 3: Motion control system for one antagonisticpair of SMA actuator wires.
2.2 The Control SystemFigure 3 shows a diagram of the control system for oneantagonistic pair of SMA wires incorporating the rapidheating mechanism described in [Featherstone and Teh,2004; Teh and Featherstone, 2004]. To actuate a 2-DOFrobot, the motion control system in Figure 3 is also ap-plied to another antagonistic pair of SMA wires.
The trajectory generator outputs joint space data forthe two-dimensional trajectory of the pantograph robot.The speed as well as the shape and size of the trajec-tory can be specified. The desired joint angle, xd(t),for each pulley is pre-calculated and forms the input tothe motion control system. Using this desired positionsignal and actual position signals from one of the twoencoders, the motion controller determines an outputsignal for each element, Id1 and Id2. These signals canbe interpreted as the desired heating currents for theforward and reverse SMA elements. The desired heatingcurrents are passed to a current limiter, which calculatessafe heating currents, Ih1 and Ih2, according to the for-mula:
Ihi = min(Idi, Imax(Ri)), i ∈ {1, 2}, (1)
where Imax(Ri) is the safe maximum heating currentcomputed according to the rapid heating algorithm de-scribed in [Featherstone and Teh, 2004; Teh and Feather-stone, 2004], and Ri is the measured electrical resistanceof the appropriate SMA wire. In effect, the resistanceis being used as an indication of temperature; and therapid heating algorithm allows a large heating currentwhen the resistance indicates that the wire is not hot,and a smaller, safe heating current otherwise. Withoutany limit on Id, there is a risk of overheating the SMA el-ements. The rapid heating method allows larger heatingcurrents to be applied without risk of overheating.
The current regulators then pass the currents of Ih1
and Ih2 through the SMA elements. The actual volt-ages across the SMA elements and the actual currentsthrough them are measured and sent to the current lim-iters so that the electrical resistance of both SMA el-ements can be calculated. However, due to noise in
Heating Current
Position Error
Boundary LayerBoundary Layer
Forward ActuatorReverse Actuator
I H
I L
0
Figure 4: Two-stage relay controller.
the signals, we found it necessary to pass them throughsoftware low-pass filters before we could obtain accurateelectrical resistance measurements.
We have investigated the behaviour of our rapid heat-ing algorithm with two motion control laws: a two-stagerelay controller and a modified proportional controller.Note that the controller designs are described for oneantagonistic pair of actuators. In the experiments, theyare applied to both antagonistic SMA-pairs to actuatethe 2-DOF pantograph robot.
2.3 The Controller DesignTwo-Stage Relay ControllerGrant’s two-stage relay controller [Grant, 1999] imple-ments the control law scheme as shown in Figure 4. Atany instant, only one SMA element of the antagonisticpair is being heated, depending on the sign of the posi-tion error. It uses two constant magnitude heating cur-rents to drive the SMA elements. The following controllaw is implemented:
(IFd, IRd) =
(0, IH) θerr < −φ(0, IL) −φ ≤ θerr < 0(IL, 0) 0 ≤ θerr < φ(IH , 0) φ ≤ θerr,
(2)
where θerr is the position error, IFd and IRd are the de-sired heating currents for the forward and reverse SMAelements respectively, and IH , IL and φ are parametersof the controller. When the position error is large, thehigh current input, IH , is used to drive the actuatorquickly to the desired position. As the position errorapproaches zero and reaches the boundary layer, φ, therelay controller switches to a lower current input, IL, forsmoother and more stable response. The forward andreverse SMA elements pull in the positive and negativedirections, as measured by the position sensor. The de-sired heating currents, IFd and IRd, are the inputs tothe current limiters which calculate the actual heatingcurrents to be sent to each SMA.
3

Position Error
Forward ActuatorReverse Actuator
0
Heating Power
P0
PRd PFd
(a)
Position Error
Forward ActuatorReverse Actuator
0
Heating Current
I 0
I Rd I Fd
(b)
Figure 5: Modified proportional controller: heatingpower vs. position error, θerr (a), and heating currentvs. position error, θerr (b).
Note that our two-stage relay controller differs fromGrant’s on the magnitude of heating currents. WhereasGrant used the safe current level specified in the SMAdata sheets as IH , we set IH to a value greater thanthe safe current level, and rely on the current limiter toprevent overheating.
Modified Proportional ControllerThe modified proportional controller algorithm is de-picted in Figure 5. The controller computes a lin-ear power ramp (Figure 5(a)) and converts the heatingpower, P , to current, I (Figure 5(b)), based on the fol-lowing relationship:
I =√
P
Rnom, (3)
where Rnom is the pre-determined, nominal resistance ofthe SMA element.
Basically the modified proportional controller imple-ments the following control law:
PFd = max(0, P0 + Kpθerr),PRd = max(0, P0 −Kpθerr),
(4)
where θerr is the position error, PFd and PRd are thedesired heating powers for the forward and reverse SMAelements in one antagonistic pair, respectively, Kp is theproportional gain, and P0 is the applied heating powerwhen θerr is zero. When the error is large, only one wireis heated according to the control law. The other wirein the same antagonistic pair remains cold. As the errordecreases, the desired heating power decreases propor-tionally. At a certain position error, the controller willcommence supplying power to the other SMA elementso that both actuators are being heated and do not be-come slack. Depending on the sign of the error, one SMAelement is supplied more power than the other, and ac-tuation occurs in the desired direction.
By setting P0 correctly (by empirical method), bothelements will be supplied the same level of heating power,and remain just above the austenite start temperature,when the position error is zero. The rationale is to keepboth wires taut when the position error is zero, by keep-ing both of them warm. This is to eliminate or to furtherreduce the limit cycle.
3 Experimental Results
The two different controllers have been tested under avariety of conditions. Under the uncoupled condition,one of the pulleys (in our experiments, the left pulley)is completely fixed at one position while the other isfree to rotate. In this case, the pantograph only acts asa mechanical load and there is no coupling effect fromthe fixed linkage. Whereas under the coupled condition,both pulleys are free to rotate and currents are sent toboth pairs of SMA wires.
Figures 6, 7 and 8 show, under uncoupled conditions,the tracking responses of the moving pulley actuated byone SMA pair to 0.1 Hz, 0.5 Hz and 1 Hz circular trajec-tories respectively, where x Hz means that one completeexecution of the trajectory takes 1/x seconds. The cir-cular trajectory has a 2cm radius. Experiments werecarried out using both the two-stage relay controller andthe modified proportional controller.
The pantograph linkage constitutes a difficult load tocontrol, as there is no physical damping in the system.The relay controller responses clearly exhibit a seriouslimit cycle problem caused by the combined behaviourof the control system and the plant. This problem ismore prominent at lower frequencies as the controllermanages to track the input command and switches be-tween the positive and negative position errors. Fig-ure 9 presents the actual angle errors from the trackingresponses in Figure 6, clearly showing the significantlylarger limit cycles with the relay controller. Using themodified proportional controller, the large limit cycleshave been reduced significantly with careful tuning of
4

0 5 10 15 20−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(a)
0 5 10 15 20−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(b)
Figure 6: Tracking response of one antagonistically actuated pulley of the 2-DOF pantograph, with the other pulleylocked in a fixed position, to a 0.1 Hz circular motion command, (a) using the relay controller, and (b) the modifiedproportional controller.
0 1 2 3 4 5−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(a)
0 1 2 3 4 5−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(b)
Figure 7: Tracking response of one antagonistically actuated pulley of the 2-DOF pantograph, with the other pulleylocked in a fixed position, to a 0.5 Hz circular motion command, (a) using the relay controller, and (b) the modifiedproportional controller.
the parameters, Kp and P0.Results also show that the modified proportional con-
troller performs similarly or even better than the relaycontroller in terms of tracking speed at 1 Hz as shownin Figure 8. However, for the modified proportional con-troller, the maximum currents supplied to the SMA ac-tuators are approximately 10% greater than IH of the re-lay controller, therefore resulting in better tracking. Al-though increasing IH would allow the relay controller to
match the speed of the proportional controller, it wouldalso result in larger limit cycles (from experimental ob-servation).
Figure 10 shows the actual currents delivered to thetwo SMA wires during the 0.5 Hz tracking response ofFigure 7. It is clear, for the two-stage relay controllershown in Figure 10(a), that only one actuator is switchedon at any instant depending on the error sign, and thereare two distinctive current levels that are delivered to the
5

0 0.5 1 1.5 2 2.5−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(a)
0 0.5 1 1.5 2 2.5−50
−45
−40
−35
−30
−25
−20
Time (s)
Ang
le (
degr
ees)
Desired PositionActual Position
(b)
Figure 8: Tracking response of one antagonistically actuated pulley of the 2-DOF pantograph, with the other pulleylocked in a fixed position, to a 1 Hz circular motion command, (a) using the relay controller, and (b) the modifiedproportional controller.
0 5 10 15 20−5
−4
−3
−2
−1
0
1
2
3
4
5
Time (s)
Ang
le E
rror
(de
gree
s)
(a)
0 5 10 15 20−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Ang
le E
rror
(de
gree
s)
(b)
Figure 9: Output shaft angle error from the tracking response in Figure 6 with the relay controller (a), and themodified proportional controller (b).
actuators. This discontinuous switching between currentlevels is the main cause of limit cycles observed. In Fig-ure 10(b), both actuators are supplied electric currents,albeit at different levels according to the modified pro-portional controller algorithm, to ensure that they aretaut. The result is the reduced level of limit cycles ob-served.
Although not shown in this paper, similar results un-der the coupled condition had been recorded in our ex-periments. In those responses, the magnitude of the po-
sition error was found to have increased. This was dueto the coupling effects of two antagonistic SMA pairs inmotion.
In Figure 11, there is clearly an increase in the errormagnitude as the frequency of the trajectory increases.Here the root-mean-square (RMS) error of the trackingresponses under both uncoupled and coupled conditionsare plotted together and compared. Note that the RMSerror for the coupled system is the average of the RMSerrors of the two individual pulleys. Results presented
6

0 1 2 3 4 50
0.05
0.1
0.15
0.2C
urre
nts
(A)
0 1 2 3 4 50
0.05
0.1
0.15
0.2
Time (s)
Cur
rent
(A
)Forward Actuator Current
Reverse Actuator Current
(a)
0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
Time (s)
Cur
rent
(A
)
Forward Actuator CurrentReverse Actuator Current
(b)
Figure 10: Actual current delivered to the two SMA wires actuating the pulley during the motion shown in Figure 7with the relay controller (a), and the modified proportional controller (b).
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
3
3.5
Frequency (Hz)
RM
S E
rror
(de
gree
s)
Coupled ConditionUncoupled Condition
(a)
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
Frequency (Hz)
RM
S E
rror
(de
gree
s)
Coupled ConditionUncoupled Condition
(b)
Figure 11: The RMS value of the angle error measured for a range of frequencies of the circular motion (a), and thesquare motion (b), of the 2-DOF pantograph using the modified proportional controller.
agree that the coupling between two actuator pairs hassome impact on the accuracy and the limit cycle, result-ing in the larger RMS errors compared to results withone pulley fixed.
In Figure 11(a), the 3.5◦ value of RMS error at 1 Hztracking corresponds to approximately 12% of the rota-tion angle range of the circular motion. Although this issignificantly better than the relay controller results, it isan indication that the modified proportional controllermay not be the ideal controller for this SMA-actuated
system. Figure 11(b) also presents the RMS error duringthe tracking of a square trajectory of the same size. Themagnitudes of the RMS errors for square tracking areeven larger compared to the circular tracking responsesbecause of the higher speeds and accelerations that arerequired to track accurately.
Experiments with other trajectories, in various shapesand sizes, also yield results that follow the same obser-vations as have been discussed in this paper.
7

4 Conclusion and Future Work
The experiments and results presented in this paper rep-resents the first of its kind on the performance of a 2-DOF SMA-actuated robot. Results obtained for mech-anisms based on only one antagonistic pair of SMA el-ements cannot be extended to explain the performanceof the pantograph due to the coupling effect between an-tagonistic pairs of SMA actuators and the weight of thepantograph.
In this paper, two different controller designs havebeen implemented for the control of the pantograph un-der different conditions to demonstrate the trajectorytracking performance of the control system. Experimen-tal results show that the modified proportional controllerhas an improved performance compared to the two-stagerelay controller. The tracking accuracy has substantiallyimproved with the elimination of large limit cycles prob-lematic to relay control. The results also demonstratethat the 2-DOF SMA-actuated robot is capable of highspeed response and relatively good tracking accuracy.One possibility of future work would be to compare themodified proportional controller with other published al-gorithms, such as in [Elahinia et al., 2004].
We also believe that faster and more accurate responsecould be achieved with better controller design and im-plementation. We are planning to design and constructa new test rig with force sensors for measuring the stresson each SMA elements. Using data from the force sen-sors, we intend to implement better control systems forSMA actuators.
References[Elahinia et al., 2004] Mohammad H. Elahinia,
T. Michael Seigler, Donald J. Leo and MehdiAhmadian. Nonlinear stress-based control of a rotarySMA-actuated manipulator. Journal of IntelligentMaterial Systems and Structures, 15(6):495-508, 2004.
[Featherstone and Teh, 2004] Roy Featherstone and YeeHarn Teh. Improving the speed of shape memory alloyactuators by faster electrical heating. In Proceedings ofthe Ninth International Symposium on ExperimentalRobotics, Paper ID 128, Singapore, June 2004.
[Grant, 1999] Danny Grant. Accurate and rapid controlof shape memory alloy actuators. PhD Thesis TR-CIM-99-11, Centre for Intelligent Machines, McGillUniversity, 1999.
[Ikuta et al., 1988] Koji Ikuta, Masahiro Tsukamotoand Shigeo Hirose. Shape memory alloy servo ac-tuator system with electric resistance feedback andapplication for active endoscope. In Proceedings ofthe IEEE International Conference on Robotics andAutomation, pages 427-430, Philadelphia, PA, April1988.
[Mosley and Mavroidis, 2001] Michael J. Mosley andConstantinos Mavroidis. Experimental nonlinear dy-namics of a shape memory alloy wire bundle actuator.Journal of Dynamic Systems, Measurement, and Con-trol, 123(1):103-112, 2001.
[Reynaerts and Van Brussel, 1998] Dominiek Reynaertsand Hendrik Van Brussel. Design aspects of shapememory actuators. Mechatronics, 8:635-656, 1998.
[Teh and Featherstone, 2004] Yee Harn Teh and RoyFeatherstone. A new control system for fast motioncontrol of SMA actuator wires. Submitted to TheFirst International Conference on Shape Memory andRelated Technologies, Paper ID 34, Singapore, Novem-ber 2004.
[Troisfontaine et al., 1998] N. Troisfontaine, Ph. Bidaudand P. Dario. Control experiments on two SMAbased micro-actuators. In A. Casals & A. T. deAlmeida (Eds.), Experimental Robotics V, pages 490-499. Springer, London, 1998.
[Yao et al., 2004] Qin Yao, Sheng Jin and Pei-Sun Ma.The micro trolley based on SMA and its control sys-tem. Journal of Intelligent and Robotic Systems,39:199-208, 2004.
8