Embed Size (px)
Citation preview

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 1
EXPERIMENT NO : EM – I/1
TITLE STUDY THE CHARACTERISTICS OF SEPARATELY EXCITED DC GENERATOR
OBJECTIVE : To plot the following characteristics of a separately excited DC generator
I. No load characteristics or magnetizing curve.
II. Load characteristics.
III. External characteristics.
APPARATUS:
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Motor
2 Generator
3 Ammeter 1
4 Ammeter 2
5 Voltmeter
6 Rheostat
7 Load Box
8 Tachometer
THEORY :
1. NO-LOAD CHARACTERISTICS OR MAGNETIZING CURVE.
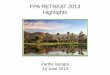
We know that gE N and for separately excited D.C. generator fI . So the generated emf
g fE I N . By increasing or decreasing the generated field current fI we can vary the generated emf
gE with speed N constant by varying the motor field current. This characteristic, drawn between the
generated emf gE and field current fI known as no-load characteristic which is shown in Fig.
FIG. 1. NO-LOAD CHARACTERISTIC FIG. 2. LOAD CHARACTERISTIC FIG. 3. EXTERNAL CHARACTERISTIC
2. LOAD CHARACTERISTICS.
We know that for separately excited D.C. generator terminal voltage t g a aV E I R and also the
generated emf g fE I N . So by varying the generated field current fI we can vary the terminal voltage
tV keeping the speed N constant by varying the motor field current for a constant load current aI . This
fI
gE
fI
tV
LI
tV Armature Resistance Drop
Armature Reaction Drop

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 2 Prepare By: Partha Ray
characteristic, drawn between the terminal voltage tV and field currentfI known as load characteristic
which is shown in Fig.
3. EXTERNAL CHARACTERISTICS
We know that for separately excited D.C. generator terminal voltage t g a aV E I R and also the
generated e.m.f. g fE I N . So by varying the load current aI we can vary the terminal voltage tV
keeping the speed N constant by varying the motor field current for a constant generated field current
fI . This characteristic, drawn between the terminal voltage tV and load current aI known as external
characteristic which is shown in Fig.
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit as shown in Fig.
2) Keep the switch S1 in OFF position.
3) Switch ON dc supply and start the motor with the help of three point starter.
4) Run the motor at its rated speed by varying the rheostat Rfm to adjust the speed.
5) Note down the voltmeter reading ( Eg ). Though the generator field is open the voltmeter will
read few volts induced due to residual magnetism.
6) Excite the generator field with full resistance Rfg from the 220 V dc source.
7) Increase the generator field If by reducing the field resistance Rfg in step. Note down at least five
reading of Eg and If. Go up to 120 % of rated generator voltage.
8) Now make the switch S1 ON.
9) By varying the field rheostat Rfg vary the field current If keeping the load current Ia constant.
10) Note down the voltmeter reading Vt and generated field current If.
11) Again make the switch S1 OFF.
12) Now adjust the generator field current If by varying the rheostat Rfg to obtain the rated induced
emf on generator.
13) Now make the switch S1 ON and vary the load current Ia step by step. For each step adjust the
motor field rheostat Rfm to keep the speed constant.
14) Note down the voltmeter reading Vt and load current Ia.
15) Disconnect the circuit from the supply.
16) Draw the three characteristics of separately excited generator.
S 1 L F A
M
A1
A2
F1
F2 DC
Su
pp
ly
A1
A2
F1
F2
L
O
A
D
G
DC
Su
pp
ly
A
A
V
Rfm
Rfg

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 3
OBSERVATION TABLE :
1. NO-LOAD CHARACTERISTICS :
Sl
No
Field Current
If
(amp)
Generated emf
Eg
(volt)
Speed
N
(rpm)
1
2
3
4
5
2. LOAD CHARACTERISRICS :
Load = amp.
Sl
No
Field Current
If
(amp)
Terminal Voltage
Vt
(volt)
Speed
N
(rpm)
1
2
3
4
5
3. EXTERNAL CHARACTERISTICS :
Sl
No Load
Terminal Voltage
Vt
(volt)
Load Current
IL
(amp)
Field Current
If
(amp)
Speed
N
(rpm)
1 1 amp.
2 2 amp.
3 3 amp.
4 4 amp.
5 5 amp.
RESULT : Draw the no-load characteristic, load characteristic and external characteristic of
separately excited dc generator.
DISCUSSION :
1. What is residual magnetism?
2. Why load characteristics have similar nature with no-load characteristics?
3. Draw the no-load characteristic, load characteristic and external characteristic of series and shunt
dc generator.
4. In external characteristics, what are the armature resistance drop and armature reactance drop?

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 4 Prepare By: Partha Ray
EXPERIMENT NO : EM – I/2
TILLE STUDY THE CHARACTERISTICS OF DC SHUNT MOTOR
OBJECTIVE : To draw the following characteristics of a D.C. shunt motor
I. Speed vs. Armature Current
II. Torque vs. Armature Current
III. Speed vs. Torque
APPARATUS:
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Motor
2 Ammeter
3 Voltmeter
4 Tachometer
THEORY :
1. TORQUE – CURRENT CHARACTERISTIC :
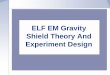
We know that for a dc motor aT I . If the effect of armature reaction is neglected, is nearly
constant in dc shunt motor and we can write aT I . Thus, for shunt motor, the torque is directly
proportional to the armature current. The torque-speed characteristic is a straight line passing through
origin as shown in Fig. 1.
FIG. 1. TORQUE – CURRENT CHARACTERISTIC FIG. 2. SPEED – CURRENT CHARACTERISTIC FIG. 3. TORQUE – SPEED CHARACTERISTIC
2. SPEED – CURRENT CHARACTERISTIC :
In a shunt motor, /sh shI V R . If V is constant shI will also remain constant. Hence the flux is
constant at no load. The flux decrease slightly due to armature reaction. If the effect of armature reaction
is neglected, flux will remain constant. The motor speed being given by
a a bV I R EN
K
For remain constant, the speed can be written as
a aN V I R
This is an equation of a straight line with a negative slope. For this reason, the speed of shunt
motor decrease linearly with the increase in armature current as shown in Fig. 2.
N
aI
Speed With
Armature Reaction Neglected
Speed
N
T
Speed With
Armature Reaction Neglected
Speed
T
aI
Torque With
Armature Reaction Neglected
Torque

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 5
3. SPEED – TORQUE CHARACTERISTIC :
Since the torque is proportional to armature current in a dc shunt motor the speed torque
characteristic of such a motor will be identical to speed-current characteristic. The speed-torque
characteristic of dc shunt motor is shown in Fig. 3.
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit diagram as shown in Fig.
2) Switch ON the power supply and start the motor with help of 3 point starter.
3) Gradually increase the load (mechanical or break load) step by step.
4) Note down the voltage, current, tension F1 and F2, speed N for every step.
5) Disconnect the motor from power supply.
6) Calculate the efficiency of motor.
7) Draw the three characteristics of dc shunt motor.
OBSERVATION TABLE :
Sl
No
Voltage
V
(volt)
Current
I
(amp)
Force (Kgf) Speed
N
(rpm) F1 F2 F = F1 - F2
1
2
3
4
5
Diameter of pulley, d = m.
CLCULATION :
Input to the motor = VI Output of the motor = Torque
Where torque = 9.812
dF and 2 ,
60
Nf f
Efficiency = Output/Input
F1 F2
L F A
M V
A
A1
A2
F1
F2
DC
Su
pp
ly

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 6 Prepare By: Partha Ray
SL
NO
Input
Power
Pin
(watt)
Total
Force
F
(Kgf)
Angular
Speed
ω
(rad/sec)
Output
Torque
T
(Nw-m)
Output
Power
Po
(watt)
Efficiency
(%)
1
2
3
4
5
RESULT : Draw the torque-current, speed-current and speed torque characteristic of d.c.
shunt motor.
DISCUSSION :
1. How armature reaction affect the three characteristics of dc shunt motor?
2. Explain the nature of efficiency vs. load curve?
3. If the supply voltage is dropped by half, what is the effect on three characteristics?
4. What happen if suddenly load is removed from the motor?

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 7
EXPERIMENT NO : EM – I/3
TITLE SPEED CONTROL OF DC MOTOR
OBJECTIVE : To study the speed control of a DC shunt motor using
A. Field current control
B. Armature voltage control
APPARATUS:
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 DC Motor
2 Ammeter 1
3 Ammeter 2
4 Voltmeter
5 Rheostat
6 Tachometer
THEORY : The equation governing the speed of a dc shunt motor is
a aV I RN
Where N = speed of the motor
V = armature voltage
aI = armature current
aR = armature resistance
= field flux
In the above equation aR is constant. So we can control the speed of motor in two ways. Firstly
by changing the field flux and secondly by changing the armature voltageV . In the both case we
vary the speed of motor by introducing a rheostat in the field circuit and armature circuit respectively.
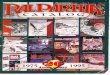
The expected graph for speed control of dc shunt motor by armature control method and field
control method is shown in below.
N
fI
Rated Speed
Rated Field
Current
N
aV
Rated Speed
Rated Armature
Voltage

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 8 Prepare By: Partha Ray
CIRCUIT DIAGRAM :
1. FIELD CONTROL METHOD 2. ARMATURE CONTROL METHOD
PROCEDURE:
1) Connect the circuit as shown in Fig.
2) Keep the armature rheostat to its maximum value and the field rheostat to its minimum value.
3) Switch ON the DC supply and start the motor by 3 point starter.
4) Gradually decrease the armature resistance R1 to zero keeping field resistance R2 constant.
5) Note down the voltmeter reading Va, armature reading Ia and speed N.
6) Gradually increase the field resistance R2 to maximum keeping armature resistance R1 constant.
7) Note down the voltmeter reading Va, armature reading If and speed N.
8) Switch OFF the power supply.
9) Draw the graph N vs. If and N vs. Va
OBSERVATION TABLE:
Sl
No
Field Control Method Armature Control Method
Field Current
If
(amp)
Speed
N
(rpm)
Armature Voltage
Va
(volt)
Speed
N
(rpm)
1
2
3
4
5
Armature Resistance = Ω Field Resistance = Ω
RESULT: Draw the speed vs. field current and speed vs. armature voltage curve of d.c. shunt motor.
DISCUSSION :
1. To control the speed above and below the rated speed, which method should have to use and why?
2. What are the methods for speed control of dc series motor?
3. If the voltmeter is connected at A point of starter instead of across armature, what does it read?
F1
F2
A
DC
Su
pp
ly
L F A
M
A1
A2
R2
R1
DC
Su
pp
ly
L F A
F1
F2 V
A2
M
A1

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 9
EXPERIMENT NO : EM – I/5
TITLE MEASUREMENT OF SPEED OF A DC SERIES MOTOR AS A FUNCTION OF
LOAD TORQUE.
OBJECTIVE : To draw the following characteristics of series motor
i. Speed vs. current.
ii. Torque vs. current.
iii. Speed vs. torque.
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 DC Series Motor
2 Ammeter
3 Voltmeter
4 Tachometer
THEORY :
1. TORQUE – CURRENT CHARACTERISTIC :
We know that for a dc motor aT I .In series motor, before saturation aI and hence at
rated load 2
aT I
The above equation shows that the torque-current characteristics of a series motor will be
parabolic. When the iron core becomes magnetically saturated, become almost constant, so that at
heavy loads
aT I
The above equation is a straight line. Thus torque-current characteristic of a dc series motor is
initially parabolic and finally becomes linear when load become large as shown in Fig. 1.
FIG. 1. TORQUE – CURRENT CHARACTERISTIC FIG. 2. SPEED – CURRENT CHARACTERISTIC FIG. 3. TORQUE – SPEED CHARACTERISTIC
2. SPEED – CURRENT CHARACTERISTIC :
The motor speed N for a series motor is given by
Speed With
Armature Reaction
Neglected
Speed
N
aI
N
T
Speed With
Armature Reaction
Neglected
Speed
Torque
T
aI

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 10 Prepare By: Partha Ray
( )a a se bV I R R EN
K
At the low value of aI the voltage drop [ ( )]a a seI R R is negligibly small in comparison with V.
VN
Since V is constant 1
N
In series motor the field flux is produced by the armature current flowing in the field winding
so that aI . Hence the series motor is variable flux machine. So
1
a
NI
Thus, for series motor, the speed is inversely proportional to the armature (load) current. The
speed-torque characteristic is a rectangular hyperbola as shown in Fig. 2.
3. SPEED – TORQUE CHARACTERISTIC :
The motor speed N for a series motor is given by
[ ( )]a a seV I R RN
And the torque equation is 2
aT I and field flux aI . SoV
NT
. Thus speed-torque
characteristic of dc motor is a rectangular hyperbola as shown in Fig. 3.
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit diagram as shown in Fig.
2) Switch ON the power supply and start the motor with help of 3 point starter.
3) Apply rated voltage to motor and gradually increase load (mechanical or break load) step by step.
4) Note down the voltage, current, tension T1 and T2, speed N for every step.
5) Disconnect the motor from power supply.
6) Calculate the efficiency of motor and draw the above mention curves.
F1 F2
L AF F1 F2
M V
A1
A2
A
DC
Su
pp
ly

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 11
OBSERVATION TABLE :
Sl
No
Voltage
V
(volt)
Current
I
(Amp)
Force (Kgf) Speed
N
(rpm) F1 F2 F = F1 - F2
1
2
3
4
5
Diameter of pulley, d = m.
CLCULATION :
Input to the motor = VI Output of the motor = Torque
Where torque = 9.812
dF and 2 ,
60
Nf f
Efficiency = Output/Input
SL
NO
Input
Power
Pin
(watt)
Total
Force
F
(Kgf)
Angular
Speed
ω
(rad/sec)
Output
Torque
T
(Nw-m)
Output
Power
Po
(watt)
Efficiency
(%)
1
2
3
4
5
RESULT : Draw the torque-current, speed-current and speed torque characteristic of dc
series motor.
DISCUSSION :
1. How armature reaction affect the three characteristics of dc series motor?
2. Explain the nature of efficiency vs. load curve?
3. If the supply voltage is dropped by half, what is the effect on three characteristics?
4. What happen if suddenly load is removed from the motor?

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 12 Prepare By: Partha Ray
EXPERIMENT NO : EM – I/6
TITLE STUDY OF THE EQUIVALENT CIRCUIT OF A SINGLE-PHASE TRANSFORMER.
OBJECTIVE : To determine the parameter of the equivalent circuit of a single phase transformer
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Transformer
2 Ammeter 1
3 Ammeter 2
4 Voltmeter 1
5 Voltmeter 2
6 Wattmeter
THEORY :
1. OPEN CIRCUIT (OC) OR NO-LOAD TEST
The purpose of this test is to determine the shunt branches parameter of the equivalent circuit of
the transformer. This test is performed in LV side which is connected to rated supply voltage at rated
frequency and HV side is kept open as shown in fig. The exciting current being about 2 to 6 % of full
load current and the ohmic loss in the primary i.e. LV side varies from 0.04 % to 0.36 % of full load
ohmic loss. In view of this ohmic loss during open circuit test is negligible in comparison with the core
loss. Hence the wattmeter reading can taken as equal to transformer core loss.
Let consider oV = Applied voltage on low voltage side
oI = Exciting current or No-load current
oP = Core loss
Then coso o o oP V I
Therefore no load power factor cos oo
o o
P
V I
The energy component of no load current cose o oI I
The magnetizing component of no load current sinm o oI I
Therefore core loss resistance oo
e
VR
I
And magnetizing reactance oo
m
VX
I
2. SHORT CIRCUIT (SC) TEST
This test is performed to determine the series parameter of equivalent circuit of transformer as
well as to obtain the full load copper loss of a single phase transformer. The LV side of the transformer
is short circuited and the instruments are placed in HV side. The applied voltage is varied by variac to
supply the rated current on HV side. As the primary mmf is almost equal to the secondary mmf in

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 13
transformer, therefore rated current in high voltage winding cause the flow of rated current in low
voltage winding. The wattmeter, in short circuit test, records the core loss and ohmic loss in both the
winding. Since the core loss has been also negligible in comparison with rated voltage core loss,
wattmeter reading can taken as equal to transformer ohmic loss in both winding.
Let consider scV = Applied voltage on high voltage side
scI = Short circuit current on high voltage side
scP = Total ohmic loss
Then the total equivalent resistance referred to high voltage side 2
sceq
sc
PR
I
The total equivalent impedance referred to high voltage side sceq
sc
VZ
I
Therefore the total equivalent reactance referred to high voltage side 2 2
eq eq eqX Z R
CIRCUIT DIAGRAM :
1. OPEN CIRCUIT TEST
Fig. (a) 2. SHORT CIRCUIT TEST
Fig. (b)
PROCEDURE :
1) Connect the circuit as shown in Fig (a)
2) Set the variac at zero output voltage.
3) Switch ON the supply and by varying the applied voltage in step from zero to rated voltage of
low voltage (LV) side.
4) Note down the ammeter, voltmeter and wattmeter reading.
5) Disconnect the circuit from supply and again connect the circuit as shown in Fig (b)
6) Set the variac at zero output voltage.
A
V
M
C V
L
W
1 Φ
AC
Su
pp
ly
1 Φ
AC
Su
pp
ly
M
C V
L
W V
A
HV LV
LV HV

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 14 Prepare By: Partha Ray
7) Switch ON the supply and increase the input voltage of transformer starting from zero in
varying small step till ammeter indicates the full load current of high voltage (HV) side.
8) Note down the ammeter, voltmeter and wattmeter reading.
9) Disconnect the circuit from supply.
10) Calculate the different parameter of transformer from the record data.
11) Draw the equivalent circuit of single phase transformer.
OBSERVATION TABLE :
Open Circuit Test Short Circuit Test
Voltage
Vo
(volt)
Current
Io
(Amp)
Power Input
Wo
(watt)
Voltage
Vsc
(volt)
Current
Isc
(Amp)
Power Input
Wsc
(watt)
RESULT : Core loss resistance, Ro = ohm
Magnetizing reactance, Xo = ohm
Total equivalent resistance referred to high voltage side, Req = ohm
Total equivalent reactance referred to high voltage side, Xeq = ohm
Draw the equivalent circuit of single phase transformer.
DISCUSSION :
1. Why OC and SC test is performed on HV and LV side respectively?
2. Why iron loss and copper loss is neglected in SC and OC test respectively?
3. How these tests are performed in case of three phase transformer?

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 15
EXPERIMENT NO : EM – I/7
TITLE POLARITY TEST OF SINGLE-PHASE TRANSFORMER AND STUDY OF THE
DIFFERENT CONNECTIONS OF THREE-PHASE TRANSFORMER.
OBJECTIVE : To check the polarity of a single-phase transformer and to study the different vector
group of a three-phase transformer
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Transformer 1
2 Transformer 2
3 Transformer 3
4 Voltmeter
THEORY :
1. POLARITY TEST :
Polarity testing of transformer is vital before connecting them in parallel. Otherwise, with
incorrect polarity, it is not possible to connect them in parallel. The two terminals of primary are marked
as A1 and A2 and other two terminals of secondary are marked as a1 and a2 respectively as shown in fig.
To determine the relative polarity of two-winding transformer, the two winding are connected in series
across a voltmeter, while one of the winding is excited from a suitable voltage source as shown in fig. If
the polarities of the windings are as marked on the diagram, voltmeter should read V = V1 ~ V2 and if it
reads (V1 + V2) the polarity marking of one of the winding must be interchanged.
2. VECTOR GROUPING :
Basically three-phase transformer has two types of winding, namely (a) star and (b) delta.
Accordingly three-phase transformer is named Yd, Yy, Dy, Dd etc. In these various connections HV line
voltage and LV line voltage of same transformer may have a phase displacement. Depending upon this
phase difference, transformer are classified in different groups – i. Group I (0º Displacement) : Yy0, Dd0.
ii. Group II (180º Displacement) : Yy6, Dd6.
iii. Group III (-30º Displacement) : Yd11, Dy11.
iv. Group IV (30º Displacement) : Yd1, Dy1.
V
V1 V2
A1
A2
a2
a1

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 16 Prepare By: Partha Ray
CIRCUIT DIAGRAM :
1. POLARITY TEST :
2. CONNECTION Yy0 AND Yy6:
3. CONNECTION Yd1 AND Yd11:
PROCEDURE :
1. POLARITY TEST
1) Connect the circuit as shown in Fig.
2) Excite the primary from single phase AC supply.
V1
V2
V
V V V3
1 Φ
AC
Su
pp
ly
c2
c1
A1
A2
a1
a2
B1
B2
b1
b2
C1
C2
B
Y
R
b
y
r
c2
c1
A1
A2
a1
a2
B1
B2
b1
b2
C1
C2
B
Y
R
b
y
r
b
y
r
B
Y
R
c2
c1
A1
A2
a1
a2
B1
B2
b1
b2
C1
C2
B
Y
R
b
y
r
c2
c1
A1
A2
a1
a2
B1
B2
b1
b2
C1
C2

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 17
3) Take the Voltmeter reading V1, V2 and V3.
4) Marked the polarity on the basis of the voltmeter reading.
5) Disconnect the supply and this test is performed on other two transformers.
2. VECTOR GROUPING
1) Connect the circuit as shown in Fig.
2) Excite the primary from 230 V, 50 Hz single phase AC supply.
3) Take the voltmeter reading VPh1, VL1, VPh2 and VL2.
4) Disconnect the circuit from the supply.
5) This test is done for different vector groups as shown in Fig.
OBSERVATION TABLE :
TABLE - I
Terminal
Sorted
Voltmeter
V1
(volt)
Voltmeter
V2
(volt)
Voltmeter
V3
(volt)
Polarity
TABLE – II
Connection
Primary Winding Secondary Winding
Line Voltage
VL1
(volt)
Phase Voltage
VPh1
(volt)
Line Voltage
VL2
(volt)
Phase Voltage
VPh2
(volt)
Yy0
Yy6
Yd1
Yd11
RESULT : Draw the vector diagram of Dd0, Dd6, Dy1, Dy11.
Draw the connecting diagram of Yd5, Yd7, Dy5, Dy7.
DISCUSSION:
1. Why marking of polarity is essential?
2. How can you change the vector group from Dy1 to Dy11 for an existing transformer bank?
3. Draw the connecting diagram of Dd2, Dd4.

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 18 Prepare By: Partha Ray
EXPERIMENT NO : EM – I/8
TITLE STUDY OF EQUIVALENT CIRCUIT OF THREE-PHASE INDUCTION MOTOR BY
NO-LOAD TEST AND BLOCKED-ROTOR TEST.
OBJECTIVE : To determine the parameter of equivalent circuit of three phase induction motor.
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Induction Motor
2 Voltmeter
3 Ammeter
4 Wattmeter 1
5 Wattmeter 2
6 Variac
THEORY :
1. NO-LOAD TEST :
This test is similar to open circuit test on a transformer. A three-phase auto-transformer is used to
supply rated voltage at the rated frequency. The motor is runs at no load. The power input is measured
by two wattmeter method. The power factor under no-load condition is generally less than 0.5.
Therefore one of the wattmeter will show negative reading. It is therefore necessary to reverse the
direction of current coil terminal to take the reading.
Let consider oV = Applied per phase voltage on stator side
oI = Exciting per phase current or No-load current
oW = Core loss and Mechanical loss.
Therefore no load power factor cos3
oo
o o
W
V I
And per phase impedance 3
oo
o
VZ
I
And per phase resistance 2
03
oo
WR
I
Therefore the per phase reactance 2 2
0 0oX Z R
2. BLOCK ROTOR TEST :
In this test motion of the rotor is blocked by a brake or belt. This test is analogous to the short-
circuit test of a transformer because the rotor winding is short-circuited. Only a reduced voltage needs to
be applied to the stator at rated frequency. This voltage should be such that the ammeter reads rated
current of motor. The total power input Wsc is equal to the algebraic sum of the two wattmeter reading
i.e equal to copper loss of stator and rotor.

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 19
Let consider scV = Applied per phase SC voltage on stator side.
scI = Short circuit per phase current.
scW = Total ohmic loss.
Then the total equivalent per phase resistance 23
sceq
sc
WR
I
The total equivalent per phase impedance 3
sceq
sc
VZ
I
Therefore total equivalent per phase reactance 2 2
eq eq eqX Z R
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit as shown in Fig.
2) Switch ON the power supply and apply the voltage in stator with the help of three-phase variac
at rated voltage.
3) Note down the voltmeter, ammeter and wattmeter reading.
4) Increase the supply voltage gradually to rated the voltage.
5) Note down the voltmeter, ammeter and wattmeter reading.
6) Disconnect the power supply and block the rotor with the help of clamp as such a way that it
cannot rotate.
7) Apply very low voltage by gradually increase until the rated full load current will flow.
8) Note down the voltmeter, ammeter and wattmeter reading.
9) Disconnect the circuit from the supplies.
10) Calculate the different parameter of three-phase induction motor.
OBSERVATION TABLE :
No Load Test Blocked Rotor Test
Voltage
Vo
(volt)
Current
Io
(amp)
Wattmeter Reading Voltage
VSC
(volt)
Current
ISC
(amp)
Wattmeter Reading
W1
(watt)
W2
(watt)
W = W1 + W2
(watt)
W1
(watt)
W2
(watt)
W = W1 + W2
(watt)
3 Φ
AC
Su
pp
ly
W2
C V
M L
A
V
3
Φ
V
A
R
I
A
C
W1
M L
C V
3 Φ
IM

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 20 Prepare By: Partha Ray
Stator resistance per phase = Ω
CALCULATION : Let 1x = Per phase leakage reactance of stator winding.
2x = Per phase leakage reactance of rotor winding.
1r = Per phase stator resistance.
Per phase leakage reactance, 1 2
1
2eqx x X
Therefore per phase magnetizing reactance 1m oX X x
And per phase rotor self-reactance 2 2mX X x
Per phase rotor resistance
2
22 1( )eq
m
Xr R r
X
No-load or iron loss iron oP W
Full-load cupper loss cuFL scP W
RESULT : Stator resistance = Ω
Rotor resistance = Ω
Magnetic leakage reactance = Ω
Stator and rotor leakage reactance = Ω
Total loss 2
loss iron cuFLP P x P= +
x 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Ploss (watt)
Efficiency of Induction Motor 2
746100%
746iron cuFL
x HP
x HP P x Ph
´ ´= ´
´ ´ + +
x 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
η
Draw the equivalent circuit of three phase Induction Motor.
DISCUSSION:
1. How the mechanical load is incorporate in equivalent circuit?

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 21
EXPERIMENT NO : EM – I/9
TITLE : Perform Sumpner's test of single phase transformer
OBJECTIVE : To determine efficiency and regulation of single phase transformer.
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Transformer
2 Voltmeter 1
3 Voltmeter 2
4 Ammeter 1
5 Ammeter 2
6 Wattmeter 1
7 Wattmeter 2
THEORY :
The Sumpner's test is another method of determining efficiency, regulation and heating under
load conditions. The O.C. and S.C. tests give us the equivalent circuit parameters but cannot give
heating information under various load conditions. The Sumpner's test gives heating information also. In
O.C. test, there is no load on the transformer while in S.C. circuit test also only fractional load gets
applied. In all in O.C. and S.C. tests, the loading conditions are absent. Hence the results are inaccurate.
In Sumpner's test, actual loading conditions are simulated hence the results obtained are much more
accurate. Thus Sumpner's test is much improved method of predetermining regulation and efficiency
than O.C. and S.C. tests.
The Sumpner's test requires two identical transformers. Both the transformers are connected to
the supply such that one transformer is loaded on the other. Thus power taken from the supply is that
much necessary for supplying the losses of both the transformers and there is very small loss in the
control circuit. The connection diagram is shown in the Fig. 1.
While conducting this test, the primaries of the two identical transformers are connected in
parallel across the supply V1. While the secondary are connected in series opposition so that induced
e.m.f in the two secondary oppose each other. The secondary are supplied from another low voltage
supply are connected in each circuit to get the readings.

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 22 Prepare By: Partha Ray
T1 and T2 are two identical transformers. The secondary of T1 and T2 are connected in series
opposition. So EEF = EGH i.e. induced in two secondary are equal but the secondary are connected such
that E is connected to G and F is connected to H. Due to such series opposition, two e.m.f act in opposite
direction to each other and cancel each other. So net voltage ion the local circuit of secondary is zero,
when primaries are excited by supply 1 of rated voltage and frequency. So there is no current flowing in
the loop formed by two secondary. The series opposition can be checked by another voltmeter connected
in the secondary circuit as per polarity test. If it reads zero, the secondary are in series opposition and if
it reads double the induced e.m.f. in each secondary, it is necessary to reverse the connections of one of
the secondary.
As per superposition theorem, if V2 is assumed zero then due to phase opposition to current flows
through secondary and both the transformers T1, T2 are as good as on no load. So O.C. test gets
simulated. The current drawn from source V1 in such case is 2Io where Io is no load current of each
transformer. The input power as measured by wattmeter W1 thus reads the iron losses of both the
transformers. As T1, T2 are identical
No-load loss per transformer, Pi = Po /2
Then a small voltage V2 is injected into the secondary with the help of low voltage transformer,
by closing the switch S. With regulation mechanism, the voltage V2 is adjusted so that the rated
secondary current I2 flows through the secondary as shown. I2 flows from E to F and then from H to G.
The flow of I1 is restricted to the loop BAIJCDLKB and it does not pass through W1. Hence
W1 continues to read core losses. Both primaries and secondary carry rated current so S.C. test condition
gets simulated. Thus the wattmeter W2 reads the total full load copper losses of both the transformers.
Full-load loss per transformer, Pcu = Psc /2
Thus in the Sumpner's test without supplying the load, full iron loss occurs in the core while full
copper loss occurs in the windings simultaneously. Hence heat run test can be conducted on the two
transformers. In O.C. and S.C. test, both the losses do not occur simultaneously hence heat run test
cannot be conducted. This is the advantage of Sumpner's test.
From the test results the full load efficiency of each transformer can be calculated as,
Output100%
Output2 2
o scP P
h = ´
+ +
where output = VA rating x cos Φ2
As all the voltage, currents and powers are measured during the test, the equivalent circuit
parameters also can be determined. Hence the regulation at any load and load power factor condition can
be predetermined. The only limitation is that two identical transformers are required. In practice exact
identical transformers cannot be obtained. As two transformers are required, the test is not economical.
Let consider oV = Applied voltage on low voltage side
oI = Exciting current or No-load current
oP = Core loss
Then 2 coso o o oP V I

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 23
Therefore no load power factor cos2
oo
o o
P
V I
The energy component of no load current cose o oI I
The magnetizing component of no load current sinm o oI I
Therefore core loss resistance oo
e
VR
I
And magnetizing reactance oo
m
VX
I
Let consider scV = Applied voltage on high voltage side
scI = Short circuit current on high voltage side
scP = Total ohmic loss
Then the total equivalent resistance referred to high voltage side 22
sceq
sc
PR
I
The total equivalent impedance referred to high voltage side sceq
sc
VZ
I
Therefore the total equivalent reactance referred to high voltage side 2 2
eq eq eqX Z R
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit as shown in Fig.
2) Switch ON STDP1 with kept open STDP2. Set primary input voltage to rated voltage of high
voltage (HV) side.
3) Note down the ammeter, voltmeter and wattmeter reading.
Wo Wsc
1 Φ
AC
Su
pp
ly
Vo
A1
A2
a2
a1
V
A
A1
A2
a2
a1
A
V
1 Φ
AC
Su
pp
ly
Vsc
Isc Io
STDP1 STDP2
M L
C V
L M
V C

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 24 Prepare By: Partha Ray
4) Switch ON STDP2 with kept open STDP1. Set the secondary input voltage of transformer at a
low value when ammeter indicates the full load current of low voltage (LV) side.
5) Note down the ammeter, voltmeter and wattmeter reading.
6) Disconnect the circuit from supply.
7) Draw the equivalent circuit of single phase transformer.
OBSERVATION TABLE :
Open Circuit Test Short Circuit Test
Voltage
Vo
(volt)
Current
Io
(Amp)
Power Input
Wo
(watt)
Voltage
Vsc
(volt)
Current
Isc
(Amp)
Power Input
Wsc
(watt)
RESULT :
Total loss 2
loss iron cuFLP P x P= +
x 0.1 0.3 0.4 0.6 0.7 0.8 1.0
Ploss (watt)
Efficiency of transformer 2
2
2
S cos100%
S cos
FL
FL iron cuFL
x
x P x P
fh
f
´= ´
´ + +
x 0.1 0.3 0.4 0.6 0.7 0.8 1.0
η (0.8 pf)
η (unity pf)
Regulation of transformer ( )2 1
2
cos 100% taneq eq
sc sc
eq
I Z Xreg x
V Rq f q -= ´ ± ´ =
x lag unity lead
φ (degree) 80° 30° 10° 0° 10° 20° 30°
Reg (x=0.8)
Reg (x=1.0)
Draw the equivalent circuit of single phase transformer
Draw the loss curve, efficiency curve and regulation of single phase transformer.
DISCUSSION:

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 25
EXPERIMENT NO : EM – I/10
TITLE SPEED CONTROL OF THREE-PHASE SLIP RING INDUCTION MOTOR BY
ROTOR RESISTANCE CONTROL.
OBJECTIVE : Speed control of three-phase slip ring induction motor by rotor resistance control.
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Specification / Range
Makers
Name Serial No
1 Induction Motor
2 Ammeter
3 Voltmeter
4 Resistance
THEORY :
Slip ring induction motors are usually started by connecting starting resistance in the secondary
circuit, which are shorted out as the motor speed up. If the ohmic values of these resistances are properly
chosen and if the resistors are designed for continuous operation, they can serve dual purpose i.e.
starting and speed control. This method of speed control has characteristics similar to those of dc motor
speed control by means of resistance in series with armature.
Torque developed by an induction motor is given by2
2 2
2 2 2
2 2
ksR ET
R s X
When the speed is very near to synchronous speed sN i.e. when sip is very low the value of the
term 2 2
2s X is very small and can be neglected as compared to 2
2R and torque developed become
proportional to2
s
R. So it is obvious that for a given torque, slip s can be increased or speeds can be
reduced by increasing the rotor resistance. In this method speed can be control only below the rated
speed. If step of external resistance is larger speed control is smoother. In this method efficiency is
largely reduced at low speed. The curve of speed vs. resistance is shown in Fig below
Resistance
Sp
eed

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 26 Prepare By: Partha Ray
CIRCUIT DIAGRAM :
FIG : EXPERIMENTAL SET-UP FOR PERFORMING SPEED CONTROL OF SLIP-RING INDUCTION MOTOR
PROCEDURE :
1) Connect the circuit as shown in Fig.
2) Switch ON the power supply.
3) With the help of external rotor resistance starts the induction motor.
4) Vary the rotor resistance and note down the various speed.
5) Switch OFF the power supply and disconnect the motor.
6) Measure the external rotor resistance in each step by multimeter.
7) Draw the speed vs. rotor resistance curve.
OBSERVATION TABLE :
SL
NO
Voltage
V
(volt)
Rotor Current
I
(amp)
External Rotor Resistance
R2
(Ω)
Speed
N
(rpm)
1
2
3
4
5
RESULT : Draw the speed vs. rotor resistance curve of slip ring induction motor.
DISCUSSION :
1. State the different method of speed control of squirrel cage induction motor.
2. Compare the different method of speed control of squirrel cage induction motor
3. State any other method of speed control of slip-ring induction motor.
A 3 Φ External
Rotor Resistance
3 Φ
Su
pp
ly
V
3 Φ
IM

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 27
EXPERIMENT NO : EM – I/11
TITLE : Study of the performance of three-phase Squirrel-Cage induction Motor-
Determination of Iron-Loss, Friction & Windage Losses
OBJECTIVE : To determine the effect of varying applied voltage on speed, pf, input power and current
etc. and determine the Iron-Loss, Friction & Windage Losses of three-phase
squirrel-cage induction motor.
APPRATUS :
Sl
No
Apparatus
Name
Apparatus
Type Range
Makers
Name Serial No
1 Induction Motor
2 Voltmeter
3 Ammeter
4 Wattmeter 1
5 Wattmeter 2
6 Variac
THEORY :
This test is basically open circuit test or no load test. When the induction motor is decoupled
from load and the rated voltage is applied to the stator, the motor runs at no load then there exists two
types of losses
1. Iron loss and core loss
2. Mechanical loss consisting of friction loss and windage loss
The copper loss in primary is negligible as because no load current is very small. And as such the
total input power is taken to be equal to the sum of iron loss and friction and windage loss, as the motor
is run at no load. The input current, input voltage, input power and speed of motor are observed from the
experiment and the performance quantities that can be calculated are explained below
1. Slip
Due to the three phase supply given to stator of an induction motor, a rotating field of constant
magnitude is set up in the stator of motor. The speed with which this rotating magnetic field rotates is
known as synchronous speed and is given by
120
s
fN
P
Where f = supply frequency
P = no. of poles on the stator of the rotor
The actual speed of rotor Nr is always less than the synchronous speed. So the slip of the motor is
100%s r
s
N Ns
N

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 28 Prepare By: Partha Ray
2. Power Factor
Power factor can be calculated from the relation
cos oP
VI
CIRCUIT DIAGRAM :
PROCEDURE :
1) Connect the circuit as shown in Fig.
2) Switch ON power supply and apply rated voltage in stator with the help of variac.
3) Note down the voltmeter, ammeter and wattmeter's reading.
4) Decrease the supply voltage in steps till motor stops and take the meter readings in every step.
5) Disconnect the circuit from the supplies.
6) Draw the input power vs. voltage curve. The difference between the input power at rated voltage
and the intercept of friction and windage loss gives the core loss of the motor.
7) Plot the speed, input power, current, p.f. and slip vs. stator voltage.
3 Φ
AC
Su
pp
ly
W2
C V
M L
A
V
3
Φ
V
A
R
I
A
C
W1
M L
C V
3 Φ
IM
Rated Voltage
Motor at Standstill
Speed
Power Factor
Input Power
Input Current
Slip Friction and
Windage Losses
Input Voltage
Core Loss

EE 491 ELECTRICAL MACHINE LAB. MANUAL
Prepare By: Partha Ray Page | 29
OBSERVATION TABLE :
Sl
No
Voltage
VL
(volt)
Current
IL
(amp)
Wattmeter Reading Speed
N
(r.p.m.) W1
(watt)
W2
(watt)
W = W1 + W2
(watt)
1 415
2 330
3 250
4 200
5 150
6 100
7 70
8 50
9 30
10 25
11 20
12 15
13 12
14 10
15 8
16 6
17 5
18 3
19 2
20 1
RESULT :
Sl
No
Input
Voltage
(volt)
Input
Current
(amp)
Input
Power
(watt)
Speed
(r.p.m.)
Slip
(%)
Power
Factor
1 415
2 330
3 250
4 200
5 150
6 100
7 70
8 50
9 30
10 25

ELECTRICAL MACHINE LAB. MANUAL EE 491
Page | 30 Prepare By: Partha Ray
11 20
12 15
13 12
14 10
15 8
16 6
17 5
18 3
19 2
20 1
Core Loss or Iron Losss = watt
Friction and Windage Loss = watt
Draw the speed vs. stator voltage, input power vs. stator voltage, current vs. stator
voltage, pf vs. stator voltage and slip vs. stator voltage.
DISCUSSION:
1. Explain the nature of all above curves.