-
8/12/2019 Exp lit DYNAMICS.doc
1/11
-
8/12/2019 Exp lit DYNAMICS.doc
2/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics 2
Section 15.1Basics of ExplicitDynamicsKey Concepts
!mplicit !ntegration (ethos
Explicit !ntegration (ethos
Sol)tion *cc)racy
!ntegration #ime Steps
*)tomatic (ass Scaling
Static Damping
-
8/12/2019 Exp lit DYNAMICS.doc
3/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics "
Implicit Integration Methods
+#ransient Str)ct)ral, sol&es the abo&e e)ation )sing
the follo'ing
algorithm:
#he parameters an are chosen to control characteristics of
the
algorithm s)ch as acc)racy n)merical stability etc.
!t is calle an implicit methodbeca)se the response at the
c)rrent time
step epens on not only the historical information b)t also the
c)rrent
information/ iterations are neee in a single time step.
-
8/12/2019 Exp lit DYNAMICS.doc
4/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics $
Explicit Integration
Methods
+Explicit Dynamics, sol&es the abo&e e)ation )sing the
follo'ing
algorithm:
!t is calle explicit methodsbeca)se the response at the c)rrent
time can
be calc)late explicitly/ no iterations 'ithin a time step is
neee.
-
8/12/2019 Exp lit DYNAMICS.doc
5/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics 5
Solution Accuracy
+Explicit Dynamics, )ses theprinciple of conservation of
energyto
monitor the sol)tion acc)racy.
!t calc)lates o&erall energy at each cycle. !f the energy
error reaches a
threshol the sol)tion is regare as )nstable an stops. #he
efa)lt
threshol is 10.
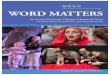
#he Energy Erroris ene by
-
8/12/2019 Exp lit DYNAMICS.doc
6/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics 3
#he re c)r&eis the energyerror. !n this
case thesol)tion is
)ite stable.
-
8/12/2019 Exp lit DYNAMICS.doc
7/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics 4
Integration Time Steps
ith explicit methos the integration time step nees to be small
eno)gh
to ens)re stability an acc)racy of the sol)tion. #he 6erman
mathematicians Co)rant 7rierichs an 8e'y s)ggeste that in a
single time step a 'a&e sho)l not tra&el f)rther than
the smallestelement si9e i.e.
'here his the smallest element si9e cis the 'a&e spee in the
element.
Beca)se of the C78 conition 'hen generating meshes for
+Explicit
Dynamics, mae s)re that one or t'o &ery small elements o not
control
the time step. !n general a )niform mesh si9e is esirable for
+Explicit
Dynamics, sim)lations.
-
8/12/2019 Exp lit DYNAMICS.doc
8/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics ;
Automatic Mass Scaling
#he 'a&e spee in an element is 'here E is the
-
8/12/2019 Exp lit DYNAMICS.doc
9/11
Chapter 15 Explicit Dynamics Section 15.1 Basics of Explicit
Dynamics >
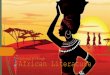
Static Damping
+Explicit Dynamics, is primarily
esigne for sol&ing transient
ynamic problems.
?sing +Static Damping, option a
steay-state sol)tion can also be
obtaine.
#he iea is to intro)ce a amping
force to critically amp the lo'est
moe of oscillation.
-
8/12/2019 Exp lit DYNAMICS.doc
10/11
Chapter 15 Explicit Dynamics Section 15.2 High-Spee !mpact
10
Section 15.2High-Spee !mpact
-
8/12/2019 Exp lit DYNAMICS.doc
11/11
Chapter 15 Explicit Dynamics Section 15." Drop #est 11
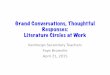
Section 15."Drop #est
10
R"
20o
5 m@s
30
120
R20
?nit: mm.
A1 #he phoneboy is mae
of an al)min)malloy.
A2 #he concrete oor canbe moele 'ith arbitrary
si9es 'e 'ill )se130x;0x10 mm.












![Application Package OF GOOD MORAL CHARACTER C.P.R. CARD [Mandatory] STATEMENT OF COMMITMENT INFECTION CONTROL [Signed] DESCRIPTION NUMBER EXP. DATE EXP. DATE EXP. DATE EXP. DATE EXP](https://img.pdfslide.us/doc/110x75/5abd9eef7f8b9a3a428bfa58/application-of-good-moral-character-cpr-card-mandatory-statement-of-commitment.jpg)