Embed Size (px)
Citation preview

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
Abstract— Constant power loads (CPLs) are often the cause of
instability and no equilibrium of DC microgrids. In this study, we
analyze the existence and stability of equilibrium of DC
microgirds with CPLs and the sufficient conditions for them are
provided. To derive the existence of system equilibrium, we
transform the problem of quadratic equation solvability into the
existence of a fixed point for an increasing fractional mapping.
Then, the sufficient condition based on the Tarski fixed-point
theorem is derived. It is less conservative compared with the
existing results. Moreover, we adopt the small-signal model to
predict the system qualitative behavior around equilibrium. The
analytic conditions of robust stability are determined by
analyzing quadratic eigenvalue. Overall, the obtained conditions
provide the references for building reliable DC microgrids. The
simulation results verify the correctness of the proposed
conditions.
Index Terms-- DC microgrid, solvability, nonlinear equations,
fixed-point theorem, quadratic eigenvalue problem, stability,
constant power load. I. INTRODUCTION
Microgrid has been identified as a key component of
modern electrical system to integrate renewable distributed
generation units [1]-[3]. Microgrids can be divided into two
types: alternating-current (AC) and direct-current (DC)
microgrid [4]-[5]. DC microgrids have attracted much
attention given three main advantages over their AC
counterparts, namely high efficiency, simple control and
robustness. They are increasingly used in applications such as
aircraft, spacecraft and electric vehicle [6]–[8]. In DC
microgrid, most loads are connected to the DC-bus through
power electronic interface circuits which make the loads
behave constant power loads (CPLs) [9]-[10].
Nevertheless, the negative impedance of CPLs often result
in instability. Thus, stability has been widely investigated in
DC microgrids with CPLs, and several stabilization methods
have been proposed [11]–[26]. The topologies of DC
microgrids in these studies can be divided into two groups
regarding the number of converters and loads: 1) n converters
and one CPL; 2) n converters and m CPLs. Manuscript received December 07, 2017; revised **, **; accepted June 10,
2018. This work was supported by the National Natural Science Foundation
of China under Grants 51677195 and 61573384, the Natural Science
Foundation of Hunan Province of China under Grant no. 2016JJ1019, and the Joint Research Fund of Chinese Ministry of Education under Grant
6141A02033514. (Corresponding author: Yao Sun.)
Zhangjie Liu, Mei Su, Yao Sun, Wenbin Yuan, and Hua Han are with the School of Information Science and Engineering, Central South University,
Changsha 410083, China (e-mail: [email protected]).
Jianghua Feng is with the CRRC Zhuzhou Institute Co. Ltd., Zhuzhou
412001, China (e-mail:[email protected]).
Various studies focused on stability criteria and stabilization
methods of DC microgrids composed of n converters and one
CPL [11]-[25]. In this topology, the distributed generations
(DGs) are connected to the CPLs through a DC bus, and when
the DC-bus resistance is neglected, the loads can be modeled
as a single CPL. Therefore, this system is equivalent to
star-connection topology consisting of n DGs and one CPL.
The existence of equilibrium in this system is determined by a
quadratic equation with one unknown, and hence the sufficient
conditions can be easily obtained [18], [25]. Therefore, related
studies mainly focus on overcoming the instability due to CPL.
Several linear techniques are used to stabilize the system
[11]–[14]. Based on the idea that increasing damping can
mitigate oscillations, several stabilization methods such as
passivity based control [11], active damping [12], and virtual
impedance [13]–[14] have been proposed. Furthermore,
several nonlinear methods such as phase-plane analysis [15],
feedback linearization [16] and sliding-mode control [17] have
been applied to overcome CPL instability. To estimate the
region of attraction around known equilibria, Lyapunov-like
functions have been proposed, including Lure Lyapunov
function [18], Brayton-Moser’s mixed potential [19]–[20],
block diagonalized quadratic Lyapunov function [21] and
Popov criterion [22]. In addition, the stability of DC
microgrids under droop control was analyzed in [23]–[25]. A
stability condition is derived based on the reduced-order
model of DC microgrids [23]. Another stability condition is
derived under the assumption that all the DG filter inductances
have the same ratio, R/L [24]. To obtain more accurate
stability conditions, a high dimensional model is used in
stability analysis [25].
Due to the transmission loss, the increase of CPL may result
in the loss of system equilibrium (i.e., voltage collapse) [26]
-[28]. Hence, finding the condition for the existence of the
equilibrium is a prerequisite. The condition for equilibrium
existence can be easily obtained under the assumption that the
DC-bus resistance can be neglected. However, in most cases,
this assumption is not reasonable. In the practical
DC-microgrid consisting of n converters and m CPLs, the
existence of equilibrium is determined by m-dimensional
simultaneous quadratic equations with m unknowns, which is
a difficult problem. By using quadratic mapping, a necessary
condition for the existence of equilibrium based on a linear
matrix inequality (LMI) is obtained in [26], where the
condition is sufficient if and only if the quadratic mapping is
convex. Although a test to verify the convexity of quadratic
mappings is given in [27], the mappings are usually
nonconvex for the case m > 2. To determine the sufficient
condition for the solvability of the m-dimensional quadratic
Existence and Stability of Equilibrium of DC
Microgrid with Constant Power Loads Zhangjie Liu, Mei Su, Yao Sun, Member IEEE, Wenbin Yuan, Hua Han and Jianghua Feng

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
equations, a contraction mapping is constructed ingeniously in
[28]. However, the obtained condition is a little conservative
because contraction mapping requires that the norm of the
mapping Jacobian matrix is less than 1. Under the assumption
that system has a constant steady-state, the stability of the
equilibrium is analyzed in [26] and [9]. In [26], the Jacobian
matrix is derived for the given equilibrium, thus, the system is
stable if the Jacobian matrix is Hurwitz. Considering that the
equilibrium depends on the uncertain loads, the locally roust
stability conditions based on LMI are obtained [9]. However,
in these studies, the existence of equilibrium and the analytical
relation among the cable resistances, capacitances, voltage
reference, the maximal loads and the control parameters have
not been addressed.
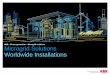
Fig.1. Diagram of the DC microgrid.
In this study, we investigate the following two questions:
1) Under what conditions should DC microgrid admit a
constant steady state and how can we reduce the
conservativeness?
2) How to design a stabilization method to guarantee
system stability and how to obtain the analytical robust
stability conditions?
The main contributions of this paper can be summarized as
A control method based on virtual resistance and virtual
inductance concept to overcome instability is proposed.
The sufficient condition for the system to admit an
equilibrium is obtained, and it is less conservative
compared with [28].
The equilibrium stability is analyzed and the analytical
stability conditions are determined using eigenvalue
analysis.
The rest of this paper is organized as follows: Section II
introduces some preliminaries and notations. Section III
describes the basic models and the proposed control scheme.
The existence of equilibrium for DC microgrids is presented
in Section IV. The stability analysis and the sufficient
conditions are detailed in Section V. Simulation results are
presented in section VI. Finally, we draw our conclusions in
Section VII.
II. PRELIMINARIES AND NOTATION
Definition 1. We denote A−B > 0 if matrix A−B is positive
definite. Matrix A (or a vector) is called nonnegative
(respectively positive, negative and nonpositive) if its entries
are nonnegative (respectively positive, negative and
nonpositive) and we denote , , ,A B A B A B A B if the
entries of A−B are all positive, nonnegative, negative and
nonpositive, respectively. In addition, 1m (0m) is the vector of
ones (zeros). For Hermitian matrix A∈ m mR , we denote its
eigenvalue as 1 mA A .
Definition 2. Square matrix A is a Z-matrix if all the
off-diagonal elements are zero or negative, and it is also an
M-matrix [29] if and only if one of these statements is true:
1) the eigenvalues of A are in the right half-plane;
2) there exists a positive vector, x, such that 0nAx .
Definition 3. Matrix A∈ n nR is irreducible if there exists no
permutation matrix P such that PTAP can be represented as
11 12
22
TA A
P APO A
where A11, and A22 are square matrices, and O is the zero
matrix of proper dimension [30].
Lemma 1. If A is an M-matrix, then
1) A + D is an M-matrix for every nonnegative diagonal
matrix D;
2) if A is irreducible, A-1 is positive [31].
Lemma 2. Tarski fixed-point theorem [32]. Given D n nR
convex, let :f D D be a continuous function such that
1) f(x) is strictly increasing, i.e., 1 2, Dx x , if 1 2x x ,
1 2f x f x ;
2) 1 2,x x D such that 11 22x xf x f x ,
there is a unique vector 2*
1x xx such that f (x*) = x*.
Lemma 3. Let A be a real positive matrix. Perron root χ and
Perron vector η satisfy Aη = χη, where η 0 and ηTη = 1.
Moreover, χ is also the spectral radius of A, denoted ρ(A).
If A B O , then ρ(A)> ρ(B) [30].
Lemma 4. Let2( )Q M K C . Let M, K and C be
positive definite Hermitian matrices. For a quadratic

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
eigenvalue problem2 0M K C , Re (λ) <0 [33].
III. DC-MICROGRID MODEL AND CONTROL SCHEME
A general DC microgrid with n converters (DGs) and m
CPLs is illustrated in Fig. 1 and consists of three main
components: sources, loads and cables. In a low-voltage DC
microgrid, the cable can be regarded as purely resistive and we
assume the loads as CPLs. In addition, we consider the
DC-microgrid topology as a graph (such as Fig.1 (b)) with the
sources and loads representing nodes, and the cables
representing edges, respectively. Furthermore, we assume the
graph as being strongly connected, i.e., every source has
access to every load.
The dynamics of the ith converter can be described by
i
i
L
i i i i
ii L i
diL V d u
dt
duC i i
dt
(1)
where Vi, di, iLi , ui and ii are the input voltage, duty cycle,
inductance current, output voltage and current of the converter,
respectively.
The system is usually unstable when there is no
stabilization measures as Fig.2 (a). To prevent the instability
caused by CPLs in a DC microgrid, we propose a controller
based on virtual resistance and virtual inductance whose duty
cycle is given by
ref 1,2, ,i
i ii i L i
i i i
L ud u k i u i n
V X V , (2)
where Xi, ki, and uref are the virtual inductance, virtual
resistance, and reference voltage of the ith converter,
respectively. It needs to be emphasized that Xi, ki and uref are
all the control parameters to guarantee a stable equilibrium.
iLiC
iV1/Vi
refu
ii
iLiC
iV1/ViLi/Xi
refu
ki
ui
PWM
(a)
(b)
PWM
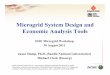
Fig.2. (a) The control diagram without stabilization method. (b) The control
diagram of the proposed method.
The control diagram of the proposed stabilization method is
presented in Fig.2, and it does not need communication. Then, substituting (2) into (1) and writting the result in
matrix form, we obtain
LL S
SL S
diX V Ki u
dt
duC i i
dt
(3)
where 1 2 n
T
L L L Li i i i , uS= [u1 u2 … un]T, iS = [i1 i2 …
in]T, V*= uref1n, C = diag{Ci}, and X = diag{Xi}, i ∈{1, 2, …,
n}. In addition, the load voltages are denoted by uL = [un+1
un+2 … un+m]T.
Applying the Kirchoff’s and Ohm’s laws, we have
1 2
1 2
,
T
S nSS SLS S S
TLS LLL L L L n n n m
i i i iY Yi u uY
Y Yi u u i i i i
(4)
where Y=[yij] is the symmetric admittance matrix of the graph,
where yij is the cable conductance, yij=0 if there is no cable
connecting nodes i and j, and rij =1/yij represents the resistance.
iS and iL are the current vectors of the sources and loads,
respectively. For a CPL, it yields
, 1, 2, ,i i iu i P i n n n m (5)
where Pi is the power of load at node i, and the right-hand side
of the equation is negative because the actual current direction
and reference are opposite.
According to (3), (4) and (5), the dynamics of the whole
system can be expressed as the following differential-algebraic
equations
0
LL
L
S
SL S
S SS
LL L L LS S
S SL L
m
diX V Ki u
dt
duC i i
dt
i Y u
U Y u U Y u
Y u
P
(6)
where UL = diag{uL}, P = [Pm+1 Pm+2 …Pm+n]T.
Remark 1: According to (6), the load voltages are determined
by m-dimensional simultaneous quadratic equations, the
increase of CPL may result in the loss of system equilibrium.
Thus, to maintain the system stable, finding the condition for
the existence of the equilibrium is a prerequisite.
IV. EXISTENCE OF EQUILIBRIUM OF DC MICROGRID
Besides instability, CPLs can cause inexistence of
equilibrium in DC microgrids [25]-[26]. For simplicity, all the
loads can be equivalent to a common CPL under the
assumption that the DC-bus resistance can be neglected [24]-
[25]. Consequently, the existence of equilibrium is formulated
by the solvability of a quadratic equation with one unknown,
whose conditions are easily obtained. However, in most cases,
the DC bus resistance cannot be neglected, then, the
equilibrium should be determined from quadratic equations
with multiple unknowns, and the topology of the solution set
is complicated [26].
A. Problem Formulation
According to (3), when the system achieves steady-state,
the output voltage is given by uS = V*– KiS, and substituting it
into (4) yields
S SS SS S SL L
L LS LS S LL L
i Y V Y Ki Y u
i Y V Y Ki Y u
, (7)
whose simplification yields to

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
1 11 1 1
1 11 1 1
S SS SS SS SL L
L LS LS SS LL LS SS SS SL L
i Y K V Y K Y Y u
i Y Y K Y K V Y Y K Y K Y Y u
. (8)
Combining this result with (5), the system admits a constant
steady state if and only if
1 0L L mLU Y u U P (9)
is solvable where
1 1
1 1 1 11= 1 ,ref LS SS SS n LL LS SS SS SLu Y Y Y K Y Y Y K Y K Y Y
(10)
Clearly, the system admits an equilibrium if and only if, for
given values of uref, Y, and P, the multidimensional quadratic
equations in (9) admit a real solution. For this issue, this paper
mainly aims at answering the following questions:
Q1: Given the maximum CPL power, how should the voltage
reference uref be regulated to keep (9) solvable?
Q2: Given the fixed uref, how to obtained the maximum CPL
power to keep (9) solvable?
B. Related Results
To analyze the solvability of m-dimensional quadratic
equations such as (9), there are mainly two methods:
“completing the square” [26] and “contraction mapping” [28].
In the next, we will start the story-line of m-dimensional
quadratic equations by one-dimensional quadratic equation.
Some existed studies neglect the resistance of the common
DC bus [24], [25]. Under this assumption, all CPLs in a DC
microgrid are equivalent to a common CPL, as shown in Fig.
2, and (9) becomes an one-dimensional quadratic equation as
the following
eq LS LL eq equ Y V Y u P (11)
where 1Teq mP P is the equivalent load, ueq∈R is its voltage,
1
11 1TLL n SS nY Y K
and
11=1T
LS n SSY Y K
are the equivalent
admittance matrices. Obviously, (11) can be solved by
completing the square as the following
22
20
2 4
LS eq LLLSeq
LL LL
Y V P YY Vu
Y Y
(12)
Thus, (11) admits an equilibrium if and only if
2
4 0LS LL eqY V Y P (13)
Then, the following question naturally arise: can the
m-dimensional quadratic equations such as (9) be solved by
completing the square? Although (9) cannot be completely
solved by this method, some valuable conclusions can still be
obtained. Equation (9) must have no solution if the following
one-dimensional quadratic equation is unsolvable
1 1 1 01 T Tm
Tm L L L mU Y u U P (14)
By completing the square, (14) can be expressed as
1 1
1 1 1 1 1 1
1
1 1
1
2
TT T T
i
T
L L
mT
n i
u Y Y Y Y u Y Y
P Y Y
(15)
Obviously, (15) is unsolvable if
1 1
1
1 11
0
2
T
m T Tn ii
Y Y
P HY Y H
(16)
So, (9) is unsolvable if (16) holds. Thus, a necessary
condition of solvability of (9) is that (16) does not hold. In fact,
(14) is sum of all the sub-equations of (9). Likewise, if the
“weighed sum”,
1 1 01 1TTm L L L
Tm mHU Y u HPUH (17)
where H = diag{hi}, has no solution, (9) is unsolvable [26].
Reshaping (17) into the square form, an extension necessary
condition of (16) can be obtained as the following
Proposition 1: Assume there exists a diagonal matrix H such
that
1 1
11 11
0
2n m T
i ii n
HY Y H
h P H HY Y H H
(18)
Then, (9) has no real solution. (The proof, that consists of a
simple “completion of squares” procedure, is given in [26].)
The necessary condition in Proposition 1 implies that if
there exists a constant steady-state, LMI (18) has no solutions.
However, is it true that the lack of solutions of (18) implies
solvability of (9)? Under what conditions (18) is necessary
and sufficient? The following results can be found in [26].
Define the multidimensional quadratic mapping, f : Rm→Rm , of the form
2 11 L L m L L Lf f u f u u U β Y uf .
Then, E={f(uL): uL∈Rm} is the image of the space of variables
uL under this map.
Proposition 2: If E is convex, (9) have a real solution if and
only if LMI (13) is unfeasible.
Reference [27] provides a test to check convexity of E.
However, for m > 2, set E is usually nonconvex. So, it is
difficult to obtain the sufficient conditions of solvability of (9)
by completing the square.
eqP
DG4 DG3
DG2DG1 Fig.3. Equivalent topology of DC microgrid with n DGs and one CPL.
To obtain the sufficient conditions, a method based on
contraction mapping is proposed in [28]. Equation (9) are
solvable if
1
14 1diag Y diag
(19)
where 11Y and idiag P . The proof, that consists
of an ingenious “constructing contraction mapping” procedure,
is detailed in [28]. Next, we provide an alternative proof along
with two stronger conditions.
C. Sufficient Conditions for Existence of Equilibrium
According to Lemma 2, if we can transform (9) into the
form x = f(x), where f(x) satisfies 1) and 2), (9) must be
solvable. Next, the main goal of this paper is to construct a
mapping that satisfies the above two conditions.
Multiplying by 1 11 LY U , (9) becomes
1 1 1 11 1 2Θ
T
L L L L n n n mu F u Y g u g u u u u
, (20)
Then, the solvability of (9) is equivalent to the existence of

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
fixed point in the fractional functions from (20). If 1) and 2) of
Lemma 2 are satisfied, the system admits a constant steady
state.
Then, we start by proving F(uL) is strictly increasing. Firstly,
we prove the following proposition.
Proposition 3: The following three statements are true
1) Y is irreducible;
2) 11Y is positive ( 1
1Y O );
3) ζ = uref 1m.
Proof. First, we assume that Y is reducible, and as Y is
symmetric, there exists a permutation matrix E such that '
11
'22
TY O
E AEO Y
. (21)
Hence, the DC microgrid can be divided into two separate
microgrids, which contradicts the assumption that all sources
and loads are strongly connected, thus proving 1).
Next, Y1 can be simplified as 1
11 LL LS SS SLY Y Y Y K Y
and we define 1
1ΓSS SL
LS LL
K Y Y
Y Y
. (22)
Clearly, Y1 is a Schur complement of Г1. According to 1) of
Lemma 1, Г1 is a positive-definite M-matrix. Clearly, Г1 is
irreducible as Y, and according to 2) of Lemma 1, 11 is
strictly positive. Applying the formula for the inverse of a
block matrix, we obtain
1 11 1 1 1
11
1 11 1 1 1
1
ΓSS SL LL LS SS SL
LL LS SS SL LL LS
K Y Y Y Y K Y Y Y
Y Y K Y Y Y Y Y
.
Because 11 is strictly positive, 1
1Y is positive and
irreducible, thus proving 2).
Finally, given that Y is a Laplacian matrix, Y1n+m=0n+m, i.e., 1
1
1 1 0
1 1 0
n SS SL m n
LL LS n m n
Y Y
Y Y
. (23)
Then, we have
1 11 1 1
11 1
1 1
1 1 1 1 0
LS LS SS n LL LS SS SS SL m
LS n LL m LS SS n SS SL m m
Y Y K Y K Y Y K Y K Y Y
Y Y Y K Y K Y Y
(24)
According to (24), we obtain1 1
1 1 0ref m mu Y , i.e., ζ =
uref 1m, thus proving 3).
According to 2) in Proposition 3, 11Y is strictly positive,
and hence 11 ΘY is also strictly positive. Thus, we have
11 2 1 2 1 1 20 , 0m mF x F x Y g x g x x x (25)
Thus, F(uL) is strictly increasing, satisfying 1) of Lemma 2. If
F(uL) also satisfies the other condition, (9) must be solvable.
In addition, since 11Y is positive, the following necessary
condition for that (9) has a positive real solution can be
obtained by completing the square.
Theorem 1. A necessary condition for that (20) has a positive
real solution is
2refu , (26)
where χ is the Perron root of 11 ΘY .
Proof. First, let 11 1 2Θ ; ; ; nY a a a where ai is the ith row
vector of 11 ΘY . We assume 0 is a real solution of (20) of
the form
1
1, 1,2, ,
m
i ref ij
j j
u a i m
, (27)
where aij represents the vector entry. Thus, (27) can be
expressed as
2 2
1
1, 1,2, ,
2 4
mref ref
i i ij
j j
u ua i m
. (28)
Then, the following can be obtained
2
1
1 10, 1,2, ,
4
mref
ij
ji j
ua i m
, (29)
whose matrix form is given by
2 1 1 1 11 1 24 0 ,
T
ref m nu I Y (30)
According to 2) of Proposition 3, 11Y is positive, i.e.,
2 114refu I Y is a Z-matrix. In addition, (30) satisfies 2) of
Definition 2, and hence 2 114refu I Y is an M-matrix.
Therefore, according to 1) in Definition 2, (26) must be
satisfied, completing the proof.
Usually, for a practical DC power system, the voltage is
positive. Therefore, Theorem 1 provides a necessary condition
for that the system admits a constant steady-state.
Because F(uL) is strictly increasing, according to Lemma 2,
if we can find positive vector x1, x2 such that x1 f(x1) f(x2)
x2, the system admits a constant steady-state. Then, the main
results are stated as follows.
Theorem 2. There must exist a unique vector Lu such that
,L L Lu F u h u provided that
2
1 ,maxref ij
i j mu f q
(31)
where q=[q1 q2 … qm]T is an arbitrary positive vector and
2 1 1 11 2min 4 ,
2
Ti i
ref ref m
i
q a qh u u q q q
q
,
2
4 max , if 2 max ,
if 2 max ,
j j ji i i
i j j i i j
jiij
j i j ji i
j ji i j i i j
j i i j
a q a q a qa q a q a q
q q q q q q
a qa qf q
q q a q a qa q a q
a q a qa q a q q q q q
q q q q
The proof is detailed in Appendix. Remark 2: We transform the quadratic equation solvability
into the existence of a fixed point in a nonlinear mapping. The
key is to construct an appropriate mapping that satisfies the
conditions of Lemma 2. In this process, the positivity of 11Y
play a crucial role. However, for a passive-transmission
network, its admittance matrix Y is a symmetric positive
semidefinite Z-matrix. Thus, Γ1 and Y1 must be irreducible

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
M-matrices. Therefore, 11Y is positive, and function F(x) is
strictly increasing. This way, we can obtain the sufficient
conditions for the system to admit an equilibrium by using the
Tarski fixed-point theorem. It is important to underscore that 1
1Y is positive whether the microgrid topology is radial or
meshed, hence, (31) can always ensure the existence of
equilibrium.
Furthermore, positive vector q in (31) is arbitrary.
Consequently, we can obtain the optimal q that minimizes the
right side of (31). Thus, the result is less conservative, and the
optimal sufficient conditions can be formulated as
2
1 ,min maxref ij
q i j mu f q
, (32)
Then, to obtain an explicit analytic condition, we take q as
several special vectors into (31).
Corollary 1. For given Y, K and P, the system must admit a
constant steady-state if the following holds
11m 2 Θin ,ref Yu
, (33)
where η is the Perron vector of 11 ΘY , max i and
min i .
Proof. Consider q = 1m in (31), and then
2
1 , 1 ,
11
1
max max 4max 1 , 1
4max 1 4 Θ
ref ij i m j mi j m i j m
i mi m
u f q a a
a Y
. (34)
Substituting ζ = uref 1m into (13), it turns equivalent to (34).
Thus, (19) is proved.
Let q = η, we have
, 2max , 2j j ji i i
j i j i i j
a aa a
. (35)
According to (35), fij(η) becomes
2
2
2
4 max , 4 if
= if
jii j
i j
jiij
j i jii j
j iji
j i
f
, (36)
and hence the following is straightforward
2
max ijf
. (37)
Thus, (33) is obtained, completing the proof.
Remark 3: Corollary 1 shows that for fixed load P, the system
must admit a constant steady-state as long as uref is large
enough, as can be expected. Meanwhile, (32) and (33) provide
numerical and analytical condition to guarantee the existence
of the equilibrium, respectively. Moreover, both (32) and (33)
are less conservative than the results from the recent works
[28].
In [28], the solvability condition is obtained by constructing
a contraction mapping, which requires that the norm of the
mapping Jacobian matrix is less than 1 ( / 1F x ).
Compared with [28], we transform (9) into an increasing
mapping, which does not need / 1F x , thus decreasing the
conservativeness.
For the given maximum CPL vector Pmax and K, the voltage
reference uref can be determined by (32), thus addressing Q1.
For the given uref and K, according to (34), the maximum CPL
vector Pmax yields 2
11 max 1
4
ref
m
uY P . (38)
Denote 11 ijY t Then, the following can be easily obtained
2
max,
1
max,
4
0
mref
ij j
j
j
ut P
P
, (39)
thus addressing Q2.
The relation among line resistances, virtual resistances,
loads and DG output voltages that make (9) solvable is
described by (32) and (33). This allows to determine design
guideline to build reliable DC microgrid.
V. STABILITY ANALYSIS OF DC MICROGRID
A. Small-signal Model around Equilibrium
According to Theorem 2, if condition (33) holds, the system
will admit a constant steady state, we denote it by
, , , ,L S S L Li u i i u . Linearizing (6) around the equilibrium, the
equivalent CPL resistances can be obtained from
2
11, 1, 2, ,i i i i i
i
i u r P u i n n n mr
(40)
where Δ represents the small-signal variation around the
equilibrium and ri is the negative CPL resistance. Substituting
(42) in linearized (5), we have
1
1
L SS SL LL L LS Si Y Y Y R Y u
, (41)
where RL = diag{ri}.
Obviously, Lu increases when uref increases.
1 1 11 1
1 11
1 Θ 0
1
L L ref ref m L L L m
ref m L L
u du u du Y g u Y R du
du I Y R du
(42)
where duref and duL are the increments of uref and uL,
respectively. When duref is positive, duL is a positive vector.
According to Definition 2, 1 11 LI Y R is an M-matrix, i.e.,
1 11 1, 1,2, ,i LI Y R i m (43)
It needs to be emphasized that (43) holds as long as the system
admits a constant steady-state.
Combining the linearized (5) with (43), the equivalent
linearized model of the system is given by
ΔΔ Δ
ΔΔ Δ
LL S
SL eq S
d iX K i u
dt
d uC i Y u
dt
, (44)

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
where 1
1eq SS SL LL L LSY Y Y Y R Y
. The system Jacobian
matrix is given by 1 1
2 1 1=
eq
X K XJ
C C Y
. (45)
B. Robust Stability Conditions
According to the Hartman–Grobman theorem, the
equilibrium is stable if and only if J2 is Hurwitz. The
characteristic polynomial of J2 is obtained as
1 1 1 1
1 1 1 1
11 1 1 1 1
1 1 1 1= +
eq eq
eq
eq
X K X λI X K XλI
C C Y C λI C Y
λI X K λI C Y C λI X K X
λI X K λI C Y X C
,(46)
which results in
2 1 1 1 1 1 1 0eq eqλ I λ X K C Y X KC Y X C . (47)
According to Lemma 4, if the coefficient matrix of equation
(47) are all symmetric and positive definite, J2 is Hurwitz.
Hence, to maintain symmetry in (47), we take X = bK, where b
is a proportionality coefficient. Then, the duty cycle is
designed as
1,2, ,i
i ii ref i L i
i i i
L ud u k i u i n
bV k V , (48)
and the system Jacobian matrix is
1
21 1
1 1
=
eq
I Kb bJ
C C Y
. (49)
Then, simplifying (47), we have
2 1 1 1 11 1 10eq eqλ I λ I C Y C Y K C
b b b
(50)
Thus, we can determine the stability condition according to
Lemma 2.The results are obtained as follows.
Theorem 3. Matrix J2 is Hurwitz if the following holds
1
0
0
eq
eq
C bY
K Y
(51)
Proof. Multiplying (50) by C, we have
2 11 10eq eqλ C λ C Y Y K
b b
(52)
Then, according to Lemma 3, (51) can be easily obtained.
Combining with the existence condition of equilibrium point,
the system admit a stable operation point if (32) and (51) hold.
Proposition 4: For any K satisfying (33), the following two
statements are true.
1
1 0
0q
q
e
e
K
Y
Y
(53)
Proof. Clearly, Yeq is the Schur complement of Г2 which is
defined as
2 1
SS SL
LS LL L
Y Y
Y Y R
(54)
Given that 12 1
1 1 0n mT
n m n m ii nr
, Γ2 must have at
least one negative eigenvalue. Let 1 11 1 LR I Y R , whose
eigenvalues clearly have a positive real part according to (43).
Thus, we have 1/2 1/2 1/2 1 1/2
2 1 1 1 1 1 0LR Y R Y I Y R Y . (55)
In fact, 1 1/2 1/21 1 2 1LY R Y R Y , and according to (55),
11 0LY R . Since
11
LS SS SLY K Y Y
is positive definite,
according to eigenvalue perturbations theorem, we have
1
1 1 11 0LL L L LS SS SLY R Y R Y K Y Y
, (56)
i.e., 1LLLY R is positive definite. Next, as Γ2 has at least one
negative eigenvalue and 1LLLY R is positive definite, according
to Schur’s theorem [29], Yeq must have at least one negative
eigenvalue, thus proving λ1(Yeq) < 0.
Because 1
1 1 11 0L LL L LS SS SLY R Y R Y K Y Y
and
1 0SSK Y , according to lemma on Schur complement, we
have 1
3 10
SS SL
LS LL L
Y K Y
Y Y R
. (57)
Since Γ3 is positive definite, according to lemma on Schur
complement, we have
1
1 1 1 0eq SS LS L LL SLK Y K Y Y R Y Y
, (58)
thus proving (53).
Remark 4: According to Proposition 4, the results in (53) are
properties that is inherited by the equilibrium point, i.e., (53)
always holds as long as the system admits an equilibrium.
According to (51) and (53), the equilibrium is stable if
min
1
0eq
Cb
Y (59)
However, different CPL vectors may lead to different
equilibrium. We assume all the CPLs are bounded in the set Ψ
defined as max0mP P P . Then, the following question
naturally arises:
Q3. How to design the control parameter b to keep system
stable for any P ?
The results are obtained as follows.
Corollary 2. For given K and uref that satisfy (32) and (33), the
equilibrium is locally robust stable if
min0C
b
, (60)
where Cmin = min{Ci}, 21
,max ,max ,maxL i iR diag u P , ,maxiu is the
steady voltage of the ith load when the CPL vector is Pmax , σ is
the minimal eigenvalue of matrix 1
1,maxSS SL LL L LSY Y Y R Y
.
Proof. When CPL power vector increases, the output currents
of DGs would have a corresponded increase, and thus the CPL
voltage will decrease due to the voltage drop of line resistance.
Consequently, for an arbitrary P , the corresponding

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
steady voltages Lu of loads yield ,maxL Lu u .Then, we obtain
1 1,maxL LR R and 1 1
,max 0LL L LL LY R Y R .Thus, we have
1 11 1
,max
1 11 1,max
0 LL L LL L
SS SL LL L LS SS SL LL L LS
Y R Y R
Y Y Y R Y Y Y Y R Y
(61)
According to eigenvalue perturbation theory, we obtain
1 0eqY (62)
Substituting (62) into (59), (60) is obtained, thus completing
the proof.
Remark 5: Corollary 2 implies that if (60) holds, the system is
locally robust stable for any P , thus Q3 is answered. In
fact, system topology just affects the eigenvalue of Yeq, and
Corollary 2 always holds subject to arbitrary topology of DC
microgrid as long as b is enough small according to (60).
Overall, the system admits a stable equilibrium when
following these two steps:
Step 1. For given maximal CPL vector Pmax and Y, selecting
the appropriate uref and K to ensure a constant steady state
according to Theorem 2 and Corollary 1; for given uref and Y,
selecting the appropriate K and determining the maximal CPL
vector Pmax to ensure a constant steady state according to
Theorem 2 and Corollary 1.
Step 2. Selecting the appropriate b to ensure the equilibrium is
stable according to Corollary 2.
Compared with [9], this paper has investigated the existence
condition of equilibrium. The sufficient existence condition of
equilibrium in this paper is less conservative compared with
[28]. Moreover, Corollary 2 provides an analytical locally
robust stability conditions as a function of the system
parameters, and it does not depend on Lyapunov equation.
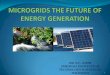
VI. CASE STUDY
To verify the presented analyses, we simulate a DC
microgrid with the structure in Fig.4 using MATLAB/
Simulink. The ideal CPL is modeled as a controlled current
source. The converter inductances are L1 = L2 =…= L10 = 2mH,
C1 = C2 =…= C5 = 2mF, C6 = C7 =…= C10 = 2.5mF. The input
voltage of converter V1 = V2 =…= V10 =3000V.
1
23
4
5 6
78
9
1011
1213
14
15
16 17 18 19
20
21
2223
24
25
26
27
2829
30
1
2
5
54
4
2
5
10
5
4
2
1
2 4
5
5
2
2
5
1 2
5
2
4
1
2 4
4
2
Fig.4. A general DC microgrid with 10 DGs and CPLs. The red and blue points represent DGs and CPLs, respectively. The black line represents the
cables. The green numbers are the resistances of cables, and the black
numbers are the identifiers of nodes.
A. Stabilization Design
According to the proposed stabilization controller, the
converter duty cycles are designed according to (48). Take k1 =
k2 =… = k10 =2, then, the duty cycles take the form
6
21,2, ,10
30001 10 i
ii ref L i
ud u i u i
b
where b and uref are the parameters that should be selected to
guarantee that the system admits a stable equilibrium.
B. Voltage Reference to Guarantee the Existence of
Equilibrium
System equilibrium Lu is determined by 1L LU Y u P ,
which can be expressed as 11 ΘL L Lu F u Y g u , where ζ
= uref [1 1 1 1 1 1 1 1 1 1]T.
According to Theorem 2 and Corollary 1, provided that
either (32) or (33) holds, there must exist a unique vector
Lu D such that L Lu F u , i.e., the system admits a
constant steady state. Let
11 2 3 4 1
1 ,2 , min max , 2, Θij
q i j mf q Y
We use q* to denote the optimal vector that minimizes
1 ,
max iji j m
f q
. If uref > τ2, the system admits an equilibrium.
Then, to test the correctness of the existence condition of
euilibirium, we evaluated five cases:
Case 1: Assume the given maximal CPL vector is Pmax =
104[15 11 10 11 11 7 8 10 8 7 11 14 9 10 8 7 6 10 14 11]T.
According to (26), (32) and (33), τi and q* can be obtained as
τ1=2006.3, τ2=2095.7, τ3=2266.5, τ4 = 2365.9, q* = [0.3221
0.3664 0.3805 0.3636 0.3542 0.4415 0.4062 0.3652 0.3898
0.4306 0.3413 0.3243 0.3732 0.3455 0.4176 0.4665 0.6993
0.3475 0.3233 0.3638]T, respectively. Take uref = 2096V,
according to Theorem 1, the system would admit an
equilibrium;
Case 2: The loads are same with Case 1.Take uref =2093V;
Case 3: Assume the given maximal CPL vector is Pmax=
104[10 10 10 10 10 8 8 8 8 8 10 10 10 10 10 10 12 12 12 12]T.
Then, τi and q* can be obtained as τ1 = 2234.1, τ2 =2462.6, τ3 =
3651.4, τ4=2761.3, q*=[0.2649 0.2822 0.2879 0.2768 0.2799
0.3196 0.3210 0.2892 0.2976 0.3144 0.2769 0.2626 0.2928
0.2801 0.3099 0.3674 0.5359 0.2937 0.2717 0.2874]T. Take
uref =2463V, according to Theorem 1, the system would admit
an equilibrium;
Case 4: The loads are same with Case 3.Take uref =2459V.
The corresponding results, obtained from MATLAB, are listed
in Table II. TABLE II.
Equilibrium of the Evaluated Cases
Cases The corresponding hξ, ζ such
that h F h F The solution of equation
uL=F(uL)
Case 1
hξ = 103[1.5061 1.3240 1.2749
1.3342 1.3696 1.0988 1.1943 1.3283 1.2445 1.1266 1.4213
1.4959 1.2999 1.4041 1.1617
1.0399]T, ζ=2096×120.
uL=103[1.5210 1.3403 1.2988 1.3868 1.3922 1.1411 1.2523
1.3641 1.2824 1.1619 1.4445
1.5529 1.3248 1.4228 1.1904 1.1054 0.8085 1.4257 1.5156
1.3530]T
Case 2 Inexistence Unsolvable
Case 3
hξ = 103[2.0712 1.9438 1.9054 1.9817 1.9602 1.7165 1.7092
1.8971 1.8435 1.7448 1.9811
2.0895 1.8735 1.9585 1.7702
1.4931 1.0237 1.8680 2.0196
1.9091]T, ζ=2263×120.
uL=103[2.0782 1.9587 1.9151 1.9862 1.9666 1.7291 1.7167
1.9007 1.8482 1.7571 1.9906
2.1014 1.8873 1.9617 1.7746
1.5022 1.0412 1.8751 2.0374
1.9119]T
Case 4 Inexistence Unsolvable

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
The results shows that equation uL=F(uL) has a solution if
uref > τ2, and it may have no solution otherwise. In the
evaluated cases, τ2 < τ4, which shows that solvability condition
(32) and (33) are stronger than the result in [28]. Moreover,
the results shows that there is a solution when uref >2095.7 and
no solution when uref =2093. Hence, condition (32) is less
conservative.
C. Performances of the proposed stabilization method
According to Corollary 2, the equilibrium is locally robust
stable if (60) holds. Let us define b0 as
min0
Cb
Hence, the system equilibrium is robust stable if b < b0. To
verify the correctness of the existence and stability condition
of euilibirium, we evaluated three cases:
Case 5. The load is same as case 1. Take uref =2500, then σ and
b0 can be obtained as σ = −0.059, b0 = 0.034. Take b = 3×10−3.
Case 6. Assume the maximal CPL vector Pmax is same as case
3, P =6×104×120 for t < 0.05s, P = 8×105×120 for 0.05 ≤ t <
0.1s, and P = Pmax for t ≥ 0.1s.Take uref = 2463, then σ and b0
can be obtained as σ = −0.1872, b0 = 0.011. Take b =1×10−3.
Case 7: The load is same as case 6. Take uref = 2459, b =
1×10-3;
Moreover, CPLs were activated at t=0.001s in all these
cases. In Case 5, ki = 0 for t < 0.2 and ki =1 onwards, i.e., the
proposed stabilization acted for t ≥ 0.2. In Case 6 and 7, ki=1
throughout the simulation. The simulation results are depicted
in Fig.4−6.
Fig.4. Load voltages for Case 5
Fig.5. Load voltages for Case 6, uref > τ2
Fig.6. Load voltages for Case 7, uref <τ2
In Fig. 3, the system is unstable for t < 0.2 and stabilize
after activating the proposed stabilization method, verifying its
effectiveness. In Case 6, uref > τ2 and the system admits a
stable equilibrium when the loads increase to maximal values
as shown in Fig.5, which also verified that the system is robust
stable under the uncertain CPLs. In contrast, in Case 7, uref <
τ2 and the load voltages collapse as shown in Fig.5. These
results confirm the correctness of the sufficient conditions to
the existence and robust stability of equilibrium presented in
this paper.
VII. CONCLUSIONS
We investigate the existence and stability of equilibrium of
in general DC microgrids with multiple CPLs. A stabilization
method is proposed and the sufficient conditions for the
system admitting a stable equilibrium are derived. We
transform the problem of nonlinear equation solvability into
the existence of fixed-point of an increasing mapping and
obtain the sufficient condition based on Tarski fixed-point
theorem. The sufficient condition is less conservative
comparing with the existing results. We adopt the linearized
equivalent model around the equilibrium and obtained the
locally robust stability conditions by analyzing the eigenvalue
of the Jacobian matrix. These conditions provide a design
guideline to build reliable DC microgrids. Finally, the
simulation results verify the correctness of the proposed
conditions.
Appendix. Proof of Theorem 2.
Proof. According to 2) in Proposition 3, 11Y is strictly
positive, and hence 11 ΘY is also strictly positive. Consequently,
11 2 1 2 1 0mF x F x Y g x g x for every 1 2 0mx x ,
satisfying 1) of Lemma 2. Likewise, the system admits an
equilibrium if 2) of Lemma 2 is also satisfied. Let x2 =ζ and
x1=hξ, where 1 1 11 2
T
mq q q
and h is an undetermined
positive scalar. Given that 11Y is positive, the following
can be obtained:
F . (63)
Then, the quadratic equation in (14) is solvable if
h F h . (64)
Clearly, (64) can be expressed as
1, 1,2, ,ref i
i
hu a k i m
q h , (65)
and (65) is equivalent to
2 21 1 1 1
1 1
2 2
4 42 2
4 42 2
ref ref ref ref
m m m mref ref ref ref
m m
q a q q a qu u h u u
q q
q a q q a qu u h u u
q q
. (66)
Next, let
2 2
1
4 42 2
mi i i i
i i ref ref ref refi ii
q a q q a qu u u u
q q
, , .
If Ω ≠ (i.e., F and F h h ), according to

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
Lemma 2, there must exist a unique vector, Lh u ,
such that L Lu F u .
Clearly, Ω is non-empty if and only if
2 2
2 2
4 42 2
4 42 2
j ji iref ref ref ref
i j
j j i iref ref ref ref
j i
q a qq a qu u u u
q q
q a q q a qu u u u
q q
(67)
holds for every i, j∈{1,2,…, m}. For specific i and j, if qi=qj,
(67) is solvable as
2 4max ,ji
refi j
a qa qu
q q
(68)
If qi ≠ qj, (67) can be expressed as
2 2 22 4 4j ji i
ref ref refj i i j
a q a qa q a qu u u
q q q q
(69)
By solving (69), the solution of (67) is given by
2
2
2
4max , 2max ,
2max ,
j j ji i iref
i j j i i j
ji
j i j ji iref
j i i jj ji i
j i i j
a q a q a qa q a q a qu
q q q q q q
a qa q
q q a q a qa q a qu
q q q qa q a qa q a q
q q q q
, (70)
thus, obtaining (31) and completing the proof.
VIII. REFERENCES
[1] X. Hou, Y. Sun, H. Han, Z. Liu, W. Yuan, M. Su."A fully decentralized control of grid-connected cascaded inverters," IEEE Trans. Power
Delivery, 2018. (DOI: 10.1109/TPWRD.2018.2816813)
[2] F.Guo, C. Wen, J. Mao, J. Chen, and Y.-D. Song, “Hierarchical decentralized optimization architecture for economic dispatch: A new
approach for large-scale power system,” IEEE Transactions on Industrial
Informatics, vol. 14, no.2, pp.523-534, 2018. [3] Y. Sun, X. Hou, J. Yang, H. Han, M. Su, and J. M. Guerrero, “New
perspectives on droop control in AC microgrid, ” IEEE Trans. Ind.
Electronics, vol. 64, no. 7, pp. 5741-5745, Jul. 2017. [4] F. Guo, Q. Xu, C. Wen, L. Wang and P. Wang, "Distributed Secondary
Control for Power Allocation and Voltage Restoration in Islanded DC
Microgrids," IEEE Trans. Sustainable Energy. Doi: 10.1109/TSTE.2018.2816944.
[5] Y. Sun, G. Shi, X. Li, W. Yuan, M. Su, H. Han, X.
Hou."An f-P/Q Droop Control in Cascaded-type Microgrid," IEEE Transactions on Power Systems, vol.33, no.1, pp. 1136-1138,Jan. 2018.
[6] Yujie Gu, Wuhua Li, and Xiangning He, “Passivity-Based Control of
DC Microgrid for Self-Disciplined Stabilization,” IEEE Trans. Power System, vol.30, no.5, pp. 2623-2632, Sept. 2015.
[7] T. Morstyn, B. Hredzak, G. D. Demetriades, and V. G. Agelidis,
“Unified Distributed Control for DC Microgrid Operating Modes,” IEEE Trans. Power System, vol.31, no.1, pp. 802-812, Jan. 2016.
[8] Dong Chen, Lie Xu, and James Yu, “Adaptive DC Stabilizer with
Reduced DC Fault Current for Active Distribution Power System Application,” IEEE Trans. Power System, vol.32, no.2, pp. 1430-1439,
Mar. 2017.
[9] Jianzhe Liu, Wei Zhang, and Giorgio Rizzoni, “Robust Stability Analysis of DC Microgrids with Constant Power Loads,” IEEE Trans.
Power System, vol.33, no.1, pp. 851-860, Jan. 2018.
[10] Z. Liu, M. Su, Y. Sun, H. Han, X. Hou, and J. M. Guerrero. "Stability analysis of DC microgrids with constant power load under distributed
control methods," Automatica , vol.90, pp.62-72, Apr. 2018.
[11] Jianwu Zeng, Zhe Zhang, and Wei Qiao, “An Interconnection and
Damping Assignment Passivity-Based Controller for a DC–DC Boost
Converter With a Constant Power Load,” IEEE Trans. Industrial
Electronics, vol.50,no. 4, pp. 2314-2322, July,2014. [12] Xiaoyong Chang, Yongli Li, Xuan Li, and Xiaolong Chen, “An Active
Damping Method Based on a Supercapacitor Energy Storage System to
Overcome the Destabilizing Effect of Instantaneous Constant Power Loads in DC Microgrids,” IEEE Tans. Energy Conversion, vol.32, no.1,
pp. 36-47, Mar. 2017.
[13] Xin Zhang, Qing-Chang Zhong, and Wen-Long Ming, “A Virtual RLC Damper to Stabilize DC/DC Converters Having an LC Input Filter while
Improving the Filter Performance,” IEEE Trans. Power Electron., vol.
31, no. 12, pp. 8017-8023, Dec. 2016. [14] X. Lu, K. Sun, J. M. Guerrero, J. C. Vasquez, L. Huang and J. Wang,
“Stability Enhancement Based on Virtual Impedance for DC Microgrids
With Constant Power Loads,” IEEE Trans. Smart Grid, vol. 6, no. 6, pp. 2770-2783,Nov. 2015.
[15] Hye-Jin Kim, Sang-Woo Kang, Gab-Su Seo, Paul Jang, and Bo-Hyung,
“Large-Signal Stability Analysis of DC Power System With Shunt Active Damper,” IEEE Trans. Industrial Electronics, vol.63, no. 10, pp.
6270-6280, Oct.,2016.
[16] A. M. Rahimi, G. A. Williamson, and A. Emadi, “Loop-Cancellation
Technique: A Novel Nonlinear Feedback to Overcome the Destabilizing
Effect of Constant-Power Loads,” IEEE Trans. Veh. Technol, vol. 59, no.
2, pp. 650-661, Feb. 2010. [17] Y. Zhao, W. Qiao and D. Ha, “A Sliding-Mode Duty-Ratio Controller
for DC/DC Buck Converters With Constant Power Loads,” IEEE trans.
Industry Applications, vol. 50, no. 2, pp. 1448-1458, Mar. 2014. [18] L. Herrera, Wei Zhang and Jin Wang, “Stability Analysis and Controller
Design of DC Microgrids with Constant Power Loads,” IEEE Trans.
Smart Grid, vol. 8, no.2, pp. 881–888, 2017. [19] R. K. Brayton, and J. K. Moser, “A theory of nonlinear Networks I,”
Quarterly of Applied Mathematics, Vol. 22, pp. 1-33, April 1964.
[20] Weijing Du, Junming Zhang, Yang Zhang and Zhaoming Qian, “Stability Criterion for Cascaded System With Constant Power Load,”
IEEE Trans. Power Electron., vol. 28, no. 4, pp. 1843-1851, Apr. 2013.
[21] C. J. Sullivan, S. D. Sudhoff, E. L. Zivi, and S. H. Zak, “Methods of optimal Lyapunov function generation with application to power
electronic converters and systems,” in Proc. IEEE Electric Ship Technol.
Symp., 2007, pp. 267–274. [22] Dena Karimipour and Farzad R. Salmasi, “Stability Analysis of AC
Microgrids With Constant Power Loads Based on Popov’s Absolute
Stability Criterion,” IEEE Trans. Circuits and Systems II, vol. 62, no. 7, pp. 696-700, July, 2015.
[23] Sandeep Anand, and B. G. Fernandes, “Reduced-Order Model and
Stability Analysis of Low-Voltage DC Microgrid,” IEEE Trans. Industrial Electron., vol. 60, no. 11, pp.5040-5049, Nov. 2013.
[24] Andr e Pires N obrega Tahim, Daniel J. Pagano, Eduardo Lenz, and
Vinicius Stramosk, “Modeling and Stability Analysis of Islanded DC Microgrids Under Droop Control,” IEEE Trans. Power Electron., vol.
30, no. 8, pp. 4597-4607, Aug. 2015.
[25] Mei Su, Zhangjie Liu, Yao Sun, Hua Han, and Xiaochao Hou. “Stability Analysis and Stabilization methods of DC Microgrid with
Multiple Parallel-Connected DC-DC Converters loaded by CPLs,” IEEE Trans. Smart Grid, vol.9, no.1, pp. 132-142, Jan. 2018.
[26] Nikita Barabanov, Romeo Ortega, Robert Griñó, Boris Polyak, “On
Existence and Stability of Equilibrium of Linear Time-Invariant Systems With Constant Power Loads,” IEEE Trans. Circuit and System, vol. 63,
no. 1, pp. 114-121, Jan. 2016.
[27] B. Polyak and E. Gryazina, “Advances in Energy System Optimization,” in Proc. ISESO-2015, Heidelberg, Germany.
[28] J.W. Simpson-Porco, F. Dörfler, F. Bullo, “Voltage collapse in complex
power grids,” Nature Communication, vol. 7, no. 10790, 2016. [29] Roger A. Horn, Charles R. Johnson, “Topics in Matrix Analysis,”
Cambridge, 1986.
[30] C. D. Meyer, Matrix Analysis and Applied Linear Algebra. Society for Industrial and Applied Mathematics, Philadelphia (2000).
[31] R. S. Varga, “Matrix Iterative Analysis,” Prentice-Hall, Englewood
Cliffs, N.J., 1962. [32] John Kennan, “Uniqueness of positive fixed points for increasing
concave functions on Rn: An elementary result,” Review of economic
Dynamic, 4(4): 893-899, 2001. [33] F. Tisseur, K. Meerbergen, The quadratic eigenvalue problem, SIAM
Rev. 43 (2001) 235–286.

0885-8950 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPWRS.2018.2849974, IEEETransactions on Power Systems
Zhangjie Liu received the B.S. degree in Detection Guidance and Control Techniques
from the Central South University,
Changsha, China, in 2013, where he is currently working toward Ph.D. degree in
control engineering.
His research interests include Renewable Energy Systems, Distributed generation and
DC micro-grid.
Mei Su was born in Hunan, China, in 1967.
She received the B.S., M.S. and Ph.D.
degrees from the School of Information Science and Engineering, Central South
University, Changsha, China, in 1989, 1992
and 2005, respectively. Since 2006, She has been a Professor with
the School of Information Science and
Engineering, Central South University. Her research interests include matrix converter,
adjustable speed drives, and wind energy conversion system.
Yao Sun (M’13) was born in Hunan, China,
in 1981. He received the B.S., M.S. and Ph.D.
degrees from the School of Information Science and Engineering, Central South
University, Changsha, China, in 2004, 2007
and 2010, respectively. He is currently with the School of Information Science and
Engineering, Central South University, China,
as an associate professor. His research interests include matrix
converter, micro-grid and wind energy conversion system.
Wenbin Yuan received the B.S. degree in
Electrical Intelligent Building from the
Xiangtan University, Xiangtan, China, in 2015, and he is currently working toward Master’s
degree in Electrical Engineering in Central South University, Changsha, China.
His research interests include Renewable
Energy Systems, Distributed generation and AC microgrid.
Hua Han was was born in Hunan, China, in
1970. She received the M.S. and Ph.D. degrees from the School of Information
Science and Engineering, Central South
University, Changsha, China, in 1998 and 2008, respectively. She was a visiting scholar
of University of Central. Florida, Orlando, FL,
USA, from April 2011 to April 2012. She is currently an associate professor with the
School of Information Science and Engineering, Central South University, China.
Her research interests include microgrid, renewable energy power
generation system and power electronic equipment.
Jianghua Feng received his B.S. degree and
M.S. degree in Electric Machine and Control from Zhejiang University, Hangzhou, China
respectively in 1986 and 1989 and his Ph.D.
degree in Control Theory and Control Engineering from Central South University,
Changsha, China in 2008. He joined CSR
Zhuzhou Institute Co., Ltd., Zhuzhou, China in 1989.
His research interest is electrical system and
its control in rail transportation field. He is
now a professorate senior engineer and has several journal papers
published in Proceedings of China Internat, IEEE International Symposium on Industrial Electronics, International Power Electronics and
Motion Control Conference, IEEE Conference on Industrial Electronics
and Applications, IPEC, IECON, ICEMS.