-
Mälardalen University
School of innovation, design and engineering
Master thesis in Electronics
Evaluation of partial reconfiguration inFPGA-based
high-performance video
systems
Author:Emil [email protected]
Supervisor:Dr. Mikael Ekström
Examiner:Prof. Lars Asplund
June 5, 2013
-
Abstract
The use of reconfigurable logic within the field of computing
has increased during the lastdecades. The ability to change
hardware during the design process enables developers to lowerthe
time to market and to reuse designs in several different products.
Many different archi-tectures for reconfigurable logic exists today
with one of the most commonly used are Field-Programmable Gate
Arrays (FPGA). The use of so called dynamic reconfiguration, or
partialreconfiguration, in FPGAs have recently been introduced by
several leading vendors but theconcept has existed for several
decades. Partial reconfiguration is a technique were a specificpart
of the FPGA can be reprogrammed during run-time. In this report an
evaluation of partialreconfiguration is presented with focus on the
Xilinx ZynQ System-On-Chip and the GIMME2vision platform developed
at Mälardalen University. Special focus has been given to the
useof partial reconfiguration in high-performance video systems
such as the GIMME2 platform.The results show that current state of
the technology is capable of performing reconfigurationswithin
strict timing constraints but that the associated software tools
are yet lacking in bothperformance and usability.
-
Sammanfattning
Användningen av rekonfigurerbar logik inom beräkningsomr̊adet
har ökat under de senaste de-cennierna. Möjligheten att ändra
h̊ardvaran under designprocessen kan hjälpa utvecklare attsänka
utvecklingstiderna och att återanvända konstruktioner i flera
olika produkter. Mångaolika arkitekturer för rekonfigurerbar
logik existerar idag och en av de vanligaste är Field-Programmable
Gate Arrays (FPGA). Användningen av s̊a kallad dynamisk
omkonfigureringeller partiell omkonfigurering i FPGA: er har
nyligen införts av flera ledande leverantörer menkonceptet har
funnits i flera decennier. Partiell omkonfigurering används för
att ändra en specifikdel i h̊ardvaran under körning. I denna
rapport presenteras en utvärdering av partiell omkon-figurering
p̊a FPGA:er med fokus p̊a Xilinxs ZynQ System-On-Chip och
GIMME2-plattformensom utvecklats vid Mälardalens högskola.
Särskilt fokus har lagts vid användningen av par-tiell
omkonfigurering i högpresterande videosystem s̊asom
GIMME2-plattformen. Resultatenvisar att den nuvarande tekniken är
kapabel att utföra partiella omkonfigureringar inom
striktatidsbegränsningar men att de tillhörande verktygen
(mjukvaran) ännu har klara brister i b̊adeprestanda och
användarvänlighet.
-
Acknowledgements
The path of the righteous man is beset on all sides by the
iniquities of the selfish and the tyrannyof evil men. Blessed is he
who, in the name of charity and good will, shepherds the weak
throughthe valley of darkness, for he is truly his brother’s keeper
and the finder of lost children. AndI will strike down upon thee
with great vengeance and furious anger those who would attemptto
poison and destroy My brothers. And you will know My name is the
Lord when I lay Myvengeance upon thee.
- Jules Winnfield, ”Pulp Fiction”, 1994
I chose this quote not because I am a religious person, on the
contrary, I chose it because it soundscool and also due to the fact
that it is something that you would not expect a hitman to say
justbefore killing a man. It makes you think, does it not? Now,
before I get all philosophical, thereare some people I would like
to thank for making this master thesis possible. First of all I
wouldlike to thank Sara, my fiancée, for her great support during
these past 4 years. Furthermore,I would to thank my family and
friends for their interest and support of my work. I wouldalso like
to thank my room mates at MDH: Fredrik, Carl, Ralf and Batu for not
throwing meout when I was annoying and also for their good ideas
and feedback. Lastly, I would like tothank my supervisor Mikael
Ekström at MDH for good support and ”can-do”-attitude and
myexaminator Lars Asplund at MDH for good feedback and challenging
tasks.
Emil Segerblad - Väster̊as - June 5, 2013
i
-
Glossary
API Application Programming Interface 46, 48
ARM Advanced Reduced Instruction Set Computer (RISC) Machine
17
ASIC Application Specified Integrated Circuit 1, 10
AXI Advanced eXtensible Interface 17, 31–33, 36, 37, 41, 46
BIOS Basic Input/Output System 39
BLE Basic Logic Element 10
CAN Controller Area Network 41
CCD Charged Coupled Device 7
CPLD Complex Programmable Logic Device 9, 10
CPU Central Processor Unit 3, 10, 13, 50
DDR Dual Data Rate 36, 41, 46, 47, 58
DMA Direct Memory Access vi, 18, 35, 46
DSP Digital Signal Processor 14
EDK Embedded Development Kit 33, 34
EMIO Extended Multiplexed I/O 18
EPP Extensible Processing Platform iv, 3, 17, 19
FPGA Field Programmable Gate Array 1–3, 5, 6, 10–17, 22–25, 27,
28, 31–33, 39, 40, 48–53
FPS Frames Per Second 27, 28, 46
FSBL First-Stage Boot-Loader 40
GIMME General Image Multiview Manipulation Engine 5
GPIO General Purpose Input/Output 41
GPS Global Positioning System 7
GPU Graphics Processing Unit 23
HDL Hardware Description Language 1, 3, 5, 11, 52
HLS High-Level Synthesis 1, 2, 6, 37, 51, 53
ii
-
I/O Input/Output 33
IC Integrated Circuit 10, 13, 16
ICAP Internal Configuration Access Port v, 15, 25–28, 33–36, 46,
49, 50, 52
IEEE Institute of Electrical and Electronics Engineers 31
IP Intellectual Property 6, 15, 16, 39, 48, 50, 58
ISE Integrated Software Environment 14–16, 34, 36, 38, 45,
51
LIDAR LIght Detection and Ranging 7
LUT Look-Up Table 10, 14
MDH Mälardalen University 41, 51, 53
MIG Memory Interface Generator 41
MIO Multiplexed Input/Output 40
MIPS Microprocessor without Interlocked Pipeline Stages 8
PCAP Parallel Configuration Access Port 16, 17, 31–34, 36, 45,
46, 49–52
PCI Peripheral Component Interconnect 14, 23
PL Programmable Logic 1, 9, 10, 17, 18, 31, 35, 39–41, 45, 46,
49, 50
PS Processing System 17, 18, 31–33, 35, 36, 40, 41, 46, 49,
50
RAM Random Access Memory 14
RISC Reduced Instruction Set Computer ii, 17
RTL Register Transfer Level 1
SD Secure Digital 40, 48
SDK Software Development Kit 40
SoC System on Chip 5, 17, 18, 31, 39, 40, 49
SRAM Static Random Access Memory 27
USB Universal Serial Bus 39
VDMA Video Direct Memory Access 36, 37, 47, 50
VHDL VHSIC Hardware Description Language v, 37, 47, 50
WSN Wireless Sensor Networks 27
XMD Xilinx Microprocessor Debugger 40
iii
-
List of Figures
1.1 Figure showing a comparison between various hardware
architectures. Picture isfrom the work of Flynn and Luk. [25] . . .
. . . . . . . . . . . . . . . . . . . . . . 2
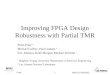
1.2 Figure showing the concept behind dynamic reconfiguration. .
. . . . . . . . . . . 31.3 Figure showing a wrongly performed
partial reconfiguration. . . . . . . . . . . . . 42.1 Figure
showing the concept of an stereo-camera setup taken from the work
of
Ohmura et al. [55] . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 82.2 Video flow example. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Filtering
example from http://rsbweb.nih.gov/ij/plugins/sigma-filter.html
92.4 Feture extraction example from
http://www2.cvl.isy.liu.se/Research/Robot/
WITAS/operations.html . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 92.5 MIPS pipeline . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 102.6 Figure
showing the mobile robot used by Weiss and Biber (left) and the
output
3D map (right). The image is from the work of Weiss et al. [64]
. . . . . . . . . . 102.7 Figure showing the general concept of an
FPGA-device. The figure is from the
article by Kuon et al. [48] . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 112.8 Figure showing a typical Look-Up
Table (LUT). [49] . . . . . . . . . . . . . . . . 112.9 Picture
from lecture slides from NTU. [8] . . . . . . . . . . . . . . . . .
. . . . . 122.10 Figure showing how a LUT can be ”programmed” to
perform logic operations. [49] 122.11 Figure showing the general
concept of an FPGA-device. The figure is from the
article by Kuon et al. [48] . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 132.12 Figure showing a typical island
style partition location strategy. . . . . . . . . . . 152.13
Figure showing the outline of the Xilinx RP. [35] . . . . . . . . .
. . . . . . . . . 162.14 The layout of the DevC-module. [38] . . .
. . . . . . . . . . . . . . . . . . . . . . 182.15 Figure showing
the general idea on how to utilize the Xilinx Extensible
Processing
Platform (EPP)-family. [41] . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 192.16 Figure showing the outline of the
Xilinx ZynQ-SoC. Image from Xilinx document
UG585. [38] . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 192.17 Figure showing the ZC702 board
peripherals. [41] . . . . . . . . . . . . . . . . . . 202.18 Figure
showing the outline of the GIMME2 platform. [3] . . . . . . . . . .
. . . . 202.19 Figure showing the GIMME2 boards front (right) and
backside (left). Notice the
two image sensors on the backside of the PCB (encircled in red).
Also notice theZynq SoC (encircled in yellow, the PS DDR Memory
(encircled in blue) and thePS DDR Memory (encircled in purple). . .
. . . . . . . . . . . . . . . . . . . . . 21
3.1 Figure showing the system from the article by Hosseini and
Hu. [29] To left isthe logic implementation and to the right is the
CPU implementation using theAltera Nios II. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 System developed by Ohmura and Takauji. Picture is retrieved
from the articleby Ohmura and Takauji. [55] . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 23
3.3 System developed by Ohmura and Takauji. Picture is retrieved
from the articleby Ohmura and Takauji. [55] . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 24
3.4 Komuro et al.’s architecture. [47] . . . . . . . . . . . . .
. . . . . . . . . . . . . . 243.5 Blair et al.’s performance. [14]
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.6
Figure showing Ming et al.’s results taken from their article. [51]
. . . . . . . . . 273.7 Koch et al.’s implemented system. Picture
is taken from the related article. [45] . 28
iv
http://rsbweb.nih.gov/ij/plugins/sigma-filter.htmlhttp://www2.cvl.isy.liu.se/Research/Robot/WITAS/operations.htmlhttp://www2.cvl.isy.liu.se/Research/Robot/WITAS/operations.html
-
3.8 Ackermann et al.’s system. [2] . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 294.1 Figure showing the Partial
Reconfiguration flow from WP374. [23] . . . . . . . . 334.2
Excluded partial reconfiguration steps from XAPP1159 shown in red.
[46] . . . . 344.3 Reference design with Microblaze and Internal
Configuration Access Port (ICAP)
added. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 354.4 Reference design from XAPP1159. . .
. . . . . . . . . . . . . . . . . . . . . . . . 364.5 Implemented
video design. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 374.6 Second implemented video design. . . . . . . . . . .
. . . . . . . . . . . . . . . . 384.7 Red filter code. . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.8
Color filter code. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 424.9 Work flow for Partial Reconfiguration
in Xilinx ISE from UG702. [35] . . . . . . 434.10 Example boot
image format for Linux. Picture from UG821. [37] . . . . . . . . .
434.11 Example boot image format for Linux. Picture from UG873.
[36] . . . . . . . . . 445.1 Excerpt from VHSIC Hardware
Description Language (VHDL)-code generated
by Vivado HLS. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 477.1 Proposed video pipe line. . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 51
A.1 Macro definitions. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 58A.2 Memory access code. . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 58
B.1 Overview of ZynQ-family. Image from DS190. [42] . . . . . .
. . . . . . . . . . . 59
v
-
List of Tables
3.1 Figure showing the results from work by Hosseini and Hu.
[29] The first four rowsare for the filtering of a 64 x 64 pixel
image while the last two are for the filteringa 256 x 256 pixel
image. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 22
3.2 Komuro et al.’s performance. [47] . . . . . . . . . . . . .
. . . . . . . . . . . . . . 253.3 Meyer et al.’s results. [53] . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.4
Table showing Ming et al.’s results taken from their article. [51]
. . . . . . . . . . 263.5 Ackermann et al.’s results. [2] . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 283.6 Ackermann et
al.’s results. [2] . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 293.7 Bhandari et al.’s results. [11] . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 303.8 Perschke et al.’s
results. Picture from the related article. [58] . . . . . . . . . .
. 303.9 Perschke et al.’s results. Picture from the related
article. [58] . . . . . . . . . . . 305.1 Figure showing the time
needed to just finish the ”write”-function call on the
ZC702 board running Linux. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 455.2 Figure showing the time needed for the
full reconfiguration flow on the ZC702
board running Linux. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 455.3 Figure showing reconfiguration time
needed to finish the Direct Memory Access
(DMA)-transfer on the ZC702 board using standalone software. . .
. . . . . . . . 465.4 Figure showing summarized test results. . . .
. . . . . . . . . . . . . . . . . . . . 46
vi
-
Contents
List of Figures iv
List of Tables vi
Introduction 1Thesis description . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 4Scope of this report .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 5Outline of this report . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 6
Background 7Introduction to computer vision and its applications
. . . . . . . . . . . . . . . . . . . 7Introduction to Programmable
Logic (PL) . . . . . . . . . . . . . . . . . . . . . . . . . 9Field
Programmable Gate Array-technology . . . . . . . . . . . . . . . .
. . . . . . . . 10Run-time Reconfigurability with focus Xilinx FPGA
. . . . . . . . . . . . . . . . . . . 12Heterogeneous systems . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16Computer Vision on FPGAs and heterogeneous systems . . . . . . .
. . . . . . . . . . 17Xilinx ZynQ-7000 and Xilinx XC702 . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 17GIMME 2 . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 18
Related work 22Implementations of computer Vision on FPGAs . . .
. . . . . . . . . . . . . . . . . . . 22Implementations of
reconfigurable FPGA-systems . . . . . . . . . . . . . . . . . . . .
. 24Implementations of reconfigurable FPGA-systems running computer
vision algorithms 27
Method 31Early work . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 31Design considerations . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31Method of reconfiguration . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 34Implemented vision components . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 36System
design in Xilinx ISE/Planahead . . . . . . . . . . . . . . . . . .
. . . . . . . . 38Interface from Linux . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 39GIMME2 . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 39
Results 45Performance of reconfiguration methods . . . . . . . .
. . . . . . . . . . . . . . . . . . 45Vision component
implementation . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 47Software implementation evaluation . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 48GIMME2 . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Discussion 49
Future work 51
Conclusions 52
vii
-
Bibliography 54
Appendix A Device interface from Linux 58
Appendix B Overview of Xilinx ZynQ-family 59
viii
-
Introduction
Within the world of computation one of the largest open
questions is which hardware platform,or architecture, to use for a
certain task. Some platforms can achieve high clock frequencies
butlow degrees of parallelism while others can achieve high degree
of parallelism but are limitedto lower clock frequencies. Each
architecture has its own inherent strengths and
weaknesses.Designers are often faced with the problem of choosing
the right platform for the right task,which is not always an simple
problem to solve as costs, availability and design support alsoplay
a major role during development and production. Hence, performance
is not always themost important aspect to consider when choosing a
platform.
Today many applications exist where both performance and costs
are critical aspects. Theindustry standard for many years to use
for such applications have been to design and imple-ment
Application Specified Integrated Circuits (ASICs). ASICs have the
advantage of beingcheap to produce and allows for high performance
in general. ASICs are not without problems,however. Long
development times, expensive in small to medium-scale production
and no re-programmability after production are some its inherent
disadvantages. Other technologies suchas Field Programmable Gate
Arrays (FPGAs) allows designer to shorten the design phase
andallows for a high-degree of re-programmability after production.
FPGAs belongs to a muchlarger family known as Programmable Logic
(PL) where focus is on the programmability of thehardware and can
jokingly be refereed to as ”Lego-logic” due to its high degree of
custom-ability.
The use of PL has increased over the years in embedded systems
due the good flexibility anddecent performance that the various
PL-architectures offer. However, the reconfigurable natureof
PL-devices also has some drawbacks, such as much lower speed (in
terms of clock frequency)than other processing architectures. What
the PL-architectures lack in speed they gain inparallelism. The
ability to run tasks in parallel on PL borders to the extreme. An
comparisonbetween various hardware architectures with respect to
performance and programmability canbe found in figure 1.1.
Some PL-systems are reconfigurable during run-time. That means
that one or several sec-tions of the logic fabric can be
reprogrammed with or without affecting the operation of
othersections depending on which technique is used. Run-time
reconfiguration enables developers todynamically use
hardware-acceleration in their applications by changing the
behaviour of thelogic. Furthermore, by swapping functions in and
out of the FPGA chip area can be saved. Anexample of this concept,
known as partial reconfiguration, can be seen in figure 1.2. At
first theFPGA-fabric contains functions A-D. At some point the user
wants to put function E on to theFPGA and hence functions B and D,
in this example, must be overwritten in order to makefunction E fit
properly.
Some important aspects seen in figure 1.2 needs further
explanation. All bit streams (astream of data containing the new
configuration of the PL) for the functions to be used in thesystem
needs to be generated prior to run-time and stored in non-volatile
memory in orderto minimize reconfiguration delay and ensure a
deterministic system behaviour (generating bitstreams during
run-time is currently impossible as the time needed is vast). In
most cases thetasks put on the FPGA are generated manually by the
developer using Hardware DescriptionLanguage (HDL) but lately tools
for automatic HDL-code generation from high level languageshave
appeared on the market. One example of such a tool is Xilinx Vivado
High-Level Synthesis(HLS). Vivado HLS is able to generate Register
Transfer Level (RTL)-level code from high levellanguages, such as:
C/C++ and Matlab. RTL, not to be confused with
Resistor-Transistor
1
-
Figure 1.1: Figure showing a comparison between various hardware
architectures. Picture isfrom the work of Flynn and Luk. [25]
Logic, is a common abstraction mechanism used in hardware design
where synchronous circuitsare modelled as the data flow between
registers and the manipulation performed on the dataflow. For more
information about Xilinx Vivado HLS, please refer to the Vivado HLS
Userguide. [33].
When doing partial reconfiguration there exists a risk for
corruption of previously existingfunctions. An example can be seen
in figure 1.3.
As can be clearly seen in figure 1.3, if a component is placed
badly on to the FPGA it candestroy or interfere with other
pre-existing components. Therefore, it is of uttermost
importancethat the user keeps tracks of the boundaries of all
components on the FPGA in some manner.This is however, tiresome and
error prone to do ”by hand” so a better option to ensure compo-nent
integrity is to implement a resource manager that keeps track on
where the functions areplaced and during partial reconfiguration
makes sure that no pre-existing component is affectednegatively.
This task is highly complex and not without problems. A third
option also existsand that is to divide the area of the chip in to
different regions with different properties. Mostcommon is to have
one region being static, that is non-reconfigurable, and then
several regionsthat can be reconfigured. Using high-level design
tools, the user can then verify that non of thetasks to be put into
one of these regions violates any design rules or other
limitations. After thisis verified the functionality of each region
can be changed dynamically during run-time with-out any concern
that the reconfiguration would affect any other region. However
there existssome limitations on partial reconfiguration, both
software-wise and hardware-wise, as will bepresented later in this
report. Furthermore, some different ways of partitioning the
FPGA-logicbetween static and reconfigurable areas will be briefly
explained in the Background-section.
The applications of this technology are many. The ability to put
software tasks on hardwareare appealing, especially for systems
with a strong degree of possible parallelism in them. Anexample
here would be computer vision systems, where large chunks of data
needs to be processedin real-time. Vision systems also have a high
degree of parallelism making them ideal forhardware acceleration.
However, the software used in modern vision systems are often
complexand written in high-level languages such as C++ or Java.
Porting such complex tasks to an
2
-
Figure 1.2: Figure showing the concept behind dynamic
reconfiguration.
FPGA would be extremely hard as many of the constructs used in
high-level languages haveno direct representations in HDL. However,
some tools exist, such as Vivado HLS that waspresented earlier in
this text, for High-level language to HDL-conversion. These tools
are notwithout limitations though, as will be seen later in this
report.
Instead of creating new specialized functions for each
implementation, a library of visionalgorithms and tools are often
used in software design. One popular library for computer visionis
OpenCV. OpenCV contains several high-level functions for image
processing such as Houghtransforms, color conversion algorithms and
feature extraction methods. The OpenCV-libraryis compatible with a
wide range of operating systems, such as Linux and Microsoft
Windows.
In recent years FPGAs with hard Central Processor Unit
(CPU)-cores embedded in themhave been introduced to the market.
This enables programmers to mix the high clock frequencyof the
CPU-cores with the high parallelism and programmability of the FPGA
in order to createhigh-performing systems within a wide range of
applications. Platforms that contain severaldifferent processing
elements are known as heterogeneous platforms and will be discussed
moreextensively later in this report. Some of these heterogeneous
FPGAs even features the possibilityto reprogram the FPGA from the
hard CPU-cores during run-time. This is a interesting featureas it
could prove to be useful in certain types of high-performance
systems where a wide rangeof functions can be offloaded onto the
FPGA during run-time and hence increasing performanceand decreasing
power usage. The newly released Xilinx ZynQ EPP is a heterogeneous
systemthat features a dual-core ARM-processor and a large
FPGA-area. The Xilinx Zynq has thecapability to reconfigure the
FPGA during run-time.
3
-
Figure 1.3: Figure showing a wrongly performed partial
reconfiguration.
Thesis Description
As stated earlier this work presented in this report was done as
part of an master thesis inelectronics at Mälardalen University.
The original thesis description was produced by ProfessorLars
Asplund at Mälardalen University [7]
Reconfigurable Systems
The FPGA-area in the Zynq is reconfigurable, which means that
parts of the area canbe reloaded during run-time. This can be of
great use for robotics vision system, e.g.where different
algorithms can be loaded for navigation first and later algorithms
forobject recognition i.e a robot moving in an apartment first and
then in the kitchen itcan find the coffee . . . This master thesis
work aims to design a framework for loadinga set of OpenCV
components in the FPGA area at the same time as the camera-partis
continuously running and with the requirement that some other
vision componentsthat are resident can continue to work. The work
will use already defined blocks forthe camera input, and the work
is also connected to the research project Ralf-3, andwill be used
in a tool for allocation of software components on the FPGA.
High level programming
Xilinx has released a system called Vivado, which makes it
possible to use high levellanguages such as Matlab Simulink, C or
C++ for implementation in an FPGA.This master thesis work aims at
evaluating Vivado. Special attention should beput on components
from the OpenCV-library. In the thesis work the suitability
ofVivado for this type of computation will be evaluated. Special
attention should beput on speed and FPGA-area allocation. The
possibility of using LabView shouldbe included.
4
-
Cooperation
These two thesis works should be run simultaneously since they
benefit from eachothers results. They will also be connected to two
research groups. The roboticsgroup in terms of hardware and
IP-components for the cameras and communicationwith the dual core
ARM and the Software Engineering group in the Ralf-3 project.
This work focuses on the ”Reconfigurable Systems”-part. However,
modifications to thethesis description was needed as no student
applied for the ”High level programming”-part andhence no
OpenCV-functions were generated for the partial reconfiguration
framework to use.Instead this thesis will focus on the use of
partial reconfiguration and the properties of the XilinxZynq FPGA
and its associated tools. A more extensive description of the
thesis and this reportcan be found in the next section.
Scope of this report
In this report the Xilinx ZynQ System on Chip (SoC), that
features a dual-core ARM-processorunit and a FPGA, will be used to
demonstrate the capabilities and limitations of
heterogeneoussystems in high-performance applications such as image
or video processing with emphasis onthe partial reconfiguration
possibilities found in SoCs such as the ZynQ. The Xilinx ZynQ
SoCand the Xilinx tool suite associated with the ZynQ supports
run-time partial reconfigurationof the FPGA from both the hard
ARM-processor and within the FPGA and will hence beevaluated with
respect to usability and speed of the reconfiguration process.
Furthermore,the usability of partial reconfiguration in video
processing systems will be evaluated using theGIMME2 stereo-vision
platform. GIMME2 is a hardware platform featuring a Xilinx ZynQFPGA
developed at Mälardalen University as part of the research project
VARUM (Vision AidedRobots for Underwater Minehunting). The General
Image Multiview Manipulation Engine(GIMME) platform was first
introduced in the work of Ekstrand et al. [4] The possibility
ofgenerating hardware components of OpenCV-like-functions will also
be explored and evaluated,to some degree, using the Xilinx Vivado
HLS-tool suite. The motivation of this is to provideprogrammers
with tools and techniques to easily place vision components onto
the ZynQ FPGAin order to offload the embedded ARM-cores in the SoC
during run-time. The work is done atMälardalen University as part
of a master thesis in electronics.
In order to limit the scope of the thesis work and to produce
clear goals for thesis itself a setof questions that this report
intends to answer can be seen below.
• What are the possible advantages of using heterogeneous
systems in video processinginstead of homogeneous systems?
• What is the performance of Xilinx’s current partial
reconfiguration methods?
• How well developed are the available software tools for
partial reconfiguration in XilinxFPGAs?
• What are the technological limitations of partial
reconfiguration in its current state?
• How can partial reconfiguration be utilized in
high-performance video systems such asstereo-vision systems and
what are the implications of this technology for machine visionin
general?
• What types of components can be partially reconfigured?
• How can Mälardalen University use partial reconfiguration in
their current research projectssuch as GIMME2?
• What is the status of high-level language to HDL-tools such as
Xilinx Vivado HLS, interms of efficiency and performance?
5
-
These questions have been answered throughout this report and a
summarized version of theanswers can be found on page 52, in the
Conclusions-section (page 52).
Outline of this report
In the Background-section, starting on page 7, an overview of
FPGAs, heterogeneous platforms,programmable logic and computer
vision in general will be presented to the reader. Furthermore,the
Xilinx ZynQ-FPGA, the GIMME2 stereo-vision platform, run-time
reconfiguration of theZynQ-FPGA and the open source image
processing library OpenCV will be discussed. In theRelated
work-section, page 22, the state of the art solutions and
implementations of relatedfields will be presented to the reader in
the form of short summaries of research papers andtechnical
reports.
In the Method-section, page 31, the implementation done by the
author of this report ispresented to the reader: A reference
systems based around Xilinx Intellectual Property (IP)-cores
running in the Zynq’s FPGA will be presented and evaluated, image
processing componentsgenerated with Vivado HLS will be presented
and evaluated and the final implementation on theGIMME2-board will
be presented and evaluated. In the Results-section, starting at
page 45, theperformance and other important features of the
implementation is evaluated and demonstrated.In the
Discussion-section, page 49, future work and possible improvements
are presented tothe reader. The conclusions of this report can be
found in the Conclusions-section, page 52.Finally, some appendices
containing useful information about the configuration and set-up
ofthe GIMME2 are presented starting at page 57.
6
-
Background
Introduction to computer vision and its applications
Computer vision, or machine vision, is becoming more wide-spread
these days as more and morerobotic and control applications require
some kind of vision to function properly.
An image on a digital system is constructed by small elements
called pixels. The amountof pixels in a image indicate the so
called resolution, a large number of pixels indicate a
highresolution. As the the resolution of an image always is finite,
regardless of the camera, the imageis a discrete representation of
an continuous environment. Using image acquisition devices suchas a
Charged Coupled Device (CCD), the three dimensional world is
converted into a twodimensional representation expressed by the
linear combination of a set of base colours. Anexample of such a
set is the Red, Green and Blue (RGB) used in the RGB-colorspace.
Byexpressing the color of an pixel as a linear combination of red,
green and blue an human-interpretable representation is
constructed. Other colorspaces that utilize other aspect of
theenvironment to create an image, that may or may not be fully
human interpretable, exists as wellbut these are outside the scope
of this report. The amount of unique colors that a colorspace
cancreate is called the color depth. For example, if using the
RGB-colorspace and each componentis expressed as 1 byte (8 bits) a
color depth of 24 bits achieved and the number of possible
colorsare 224 = 16777216.
As said earlier, a single camera will generate a two dimensional
representation of the world.This might be hard to believe as if a
human views an image he/she can ”perceive” the missingdimension,
depth. This is due to the human ability to interpolate by using
visual features inthe image. This is something a computer cannot do
(yet) and hence it is unable to perceivedepth from a single image.
By using more than one camera, depth images can be created.
Theconcept is presented in figure 2.1 by using a stereo-camera
system.
The distance, z, to an object can be calculated by the formula
seen in equation 2.1
z = (fL)/(pd) (2.1)
by a method called triangulation. L is the distance between the
two cameras, f is the focallengths of the cameras, p is the size of
one pixel in the cameras and d is the so called disparity.The
disparity is the absolute value of the difference in pixels between
the center of the object(or some other visual feature) between the
two cameras. The same concept of triangulationused here is used in,
for example, the Global Positioning System (GPS) where the position
ofa device is calculated by measuring the time it takes for signals
to travel from a number ofdifferent satellites to the device. An
example of stereo vision can be found in the work of Chenet al.
[17]
Some main ideas are common for all computer vision systems.
Firstly, representation of theenvironment must be acquired. Image
acquisition can be done in many different ways with themost common
one method is using a regular camera. Other ways of creating
representationsof the environment include LIght Detection and
Ranging (LIDAR) and ultra sonic range sen-sors. After an image has
been acquired some kind of filtering known as preprocessing is
oftenperformed in order to remove noise or unwanted part of the
image. For example, if one wantsto find green objects it would be
unnecessary to keep anything but green pixels in the image.After
the filtering is completed, an algorithm for feature extraction is
often performed. After
7
-
Figure 2.1: Figure showing the concept of an stereo-camera setup
taken from the work of Ohmuraet al. [55]
relevant features are extracted the detection of some parameter
is performed and the resultsused to control the system in some
fashion. An example of such a video processing flow can beseen in
figure 2.2. Other steps can be added as needed to the video flow in
order to performmore complex operations.
Figure 2.2: Video flow example.
One example of filtering can be seen in figure 2.3 while one
example of feature extractioncan be seen in figure 2.4.
A common method for performing these image operations
efficiently are by using a so calledpipeline. Pipe-lining is a well
known technique with the field of computer architecture and isused
to increase throughput and parallelism in computer systems. The
concept presented infigure 2.2 can be implemented as a pipeline.
The essential idea between pipe-lining is to allowmultiple
instructions to overlap in execution, i.e. instead of performing
all necessary operationsin one stage the operations on data can be
split between several stages that are interconnected.One good
example of a pipeline implementation is the one found in
Microprocessor withoutInterlocked Pipeline Stages (MIPS) pipeline
where instructions have 5 distinct steps [32]:
1. Fetch instruction (IF)
2. Decode instruction (ID)
3. Execute instruction operation (EX)
4. Access operands (MEM)
5. Write result to register (WB)
An example of this pipeline can be seen in figure 2.5. For more
information about the use ofpipelines in modern computer
architecture and the MIPS-pipeline, please refer to the works
ofPatterson and Hennessy. [32] [31]
8
-
Figure 2.3: Filtering example from
http://rsbweb.nih.gov/ij/plugins/sigma-filter.html
Figure 2.4: Feture extraction example from
http://www2.cvl.isy.liu.se/Research/Robot/WITAS/operations.html
A lot of pre-developed libraries that contain high-level image
processing exist today. Oneexample of such a library is the Open
Computer Vision library better known as OpenCV.OpenCV is a
open-source project released under the BSD-license, meaning that it
free to useeven in commercial applications. OpenCV contains a vast
range of image processing algorithmsand can be run in both Windows
and *nix-based operating systems (Linux, Mac and Android).For more
information about OpenCV please refer to the official homepage
http://opencv.org/.
One possible application of computer vision is within
agriculture as can be seen in theresearch article written by
Segerblad and Delight. [21] The most interesting example from
thework of Segerblad and Delight [21] is, according to the author
if this report atleast, the work ofWeiss and Biber [64]. Using a
LIDAR-device the two scientists detected and mapped vegetationin
fields onto a global 3D map. This LIDAR-device was mounted onto a
mobile robot thattraversed the fields. The solution showed
promising results with a successful detection rate ofmaize plants,
in a field, of 60 percent. A image showing the mobile robots used
and the generated3D map can be seen in figure 2.6.
More information about computer vision and its applications can
be found in the bookwritten by Szeliski. [61].
Introduction to Programmable Logic (PL)
Logic circuits can either be fixed or programmable. Programmable
logic behaviour can bechanged after manufacturing is completed
while fixed logic has a static behaviour. PL hasexisted for over 50
years and is extensively used in both industry and academia. It
offersdevelopers and researchers a flexible and fast way to design
and implement hardware. Complex
9
http://rsbweb.nih.gov/ij/plugins/sigma-filter.htmlhttp://www2.cvl.isy.liu.se/Research/Robot/WITAS/operations.htmlhttp://www2.cvl.isy.liu.se/Research/Robot/WITAS/operations.htmlhttp://opencv.org/
-
Figure 2.5: MIPS pipeline
Figure 2.6: Figure showing the mobile robot used by Weiss and
Biber (left) and the output 3Dmap (right). The image is from the
work of Weiss et al. [64]
Programmable Logic Device (CPLD) is one of the most commonly
used architectures togetherwith FPGA. Both technologies have their
unique properties and different applications. In thisreport the
focus will be on FPGAs and their particular applications. A
overview of the CPLDand FPGA technologies can be found in the
article by Brown et al. [16]
One of the most interesting aspects of the various types of
existing PL-architectures is thepossibility to perform tasks in
true parallel unlike regular CPU-based systems that must runtasks
in series. This means that some tasks can be performed much faster
on PL-devices thanon CPU-devices. Another appealing aspect is the
possibility to reprogram these devices withoutloss of performance.
This implies a lower development cost compared to regular
ASIC-devicesand also the possibility to correct potential hardware
bugs after they are released to the market.
Field Programmable Gate Array-technology
Modern FPGAs were first introduced in the middle of the 1980’s
by the American companyXilinx [26] but the concept can be traced
back to the 1960’s. The first Xilinx FPGAs onlycontained a few
thousand logic cells while modern FPGA Integrated Circuits (ICs)
can containseveral millions. The basic concept of the FPGA is to
pack large amounts of logic blocks,memory blocks and other
low-level hardware peripherals onto one IC and then using a
largenetwork of interconnections to ”glue” all components together.
[24] In figure 2.7 this concept isdemonstrated.
The high degree of interconnectivity is what makes the FPGA so
versatile but is also one ofthe big drawbacks with FPGAs. The high
degree interconnectivity implies that a large area ofthe FPGA-IC
must be dedicated to this task, this increases the physical size of
the packaging andalso lowers the highest possible clock frequency
as the clock signals must travel longer distances.
Configurable Control Blocks (CLBs) provide the core logic and
storage capabilities of theFPGA. In the figure 2.7 these are
labelled just ”logic”. Today, most commercial CLBs areLUT-based.
Each CLB consists of several Basic Logic Elements (BLEs) arranged
in a specialfashion. In Xilinx’s FPGAs a CLB consists of a number
of so called slices which they consistof several BLEs. A BLE
contains a N-input LUT and a D-type-flip-flop. Using a N-input
LUT
10
-
Figure 2.7: Figure showing the general concept of an
FPGA-device. The figure is from thearticle by Kuon et al. [48]
makes it possible to implement any logic functions with N-input
bits. This concept is seen infigure 2.8. By connecting the output
from the LUT to a D-flip-flop the behaviour of the circuitcan
become synchronised. More complex logic functions are implemented
by connecting severalof BLEs together. An example of this can be
seen in figure 2.11 and also in 2.9. Most basicdigital electronic
concepts are explained in the book by Kuphaldt. [49]
Figure 2.8: Figure showing a typical LUT. [49]
The programming of the FPGA is basically just connecting the
CLBs in the right fashion.Several different programming methods
exist with some being static while others changeable.The most
common one today is the use of some kind of static memory to hold
the configurationwhile older technologies used fuses and anti-fuses
to create permanent connections.
HDLs were created in order to increase the development speed of
implementations on FP-GAs. Using a synthesis tool the HDL code is
then translated into a bit stream containing theconfiguration of
the FPGA. This bit stream can then be uploaded to the FPGA from a
com-puter or dedicated programmer. The two most popular HDLs are
Verilog and VHDL. Both arecommonly used within both academia and
industry. In later years graphical development toolsfor embedded
systems on FPGAs have been released by most FPGA-manufacturers
enablingdevelopers to rapidly develop complex systems.
A survey of various FPGA-architectures can be found in the work
by Kuon et al. [48]
11
-
Figure 2.9: Picture from lecture slides from NTU. [8]
Figure 2.10: Figure showing how a LUT can be ”programmed” to
perform logic operations. [49]
Run-time Reconfigurability of FPGAs with focus on the
XilinxFPGAs
Many of the modern FPGAs support run-time reconfigurability to
some extent, with partialreconfiguration being the most common one.
Partial reconfiguration is a term commonly usedwhen referring to
reconfiguration of a specific part of the FPGA without interfering
with othercomponents located on the FPGA. As can been seen in the
Introduction, partial reconfigurationcan be dangerous to the
overall system performance or stability if performed wrongly.
Thepotential benefits of run-time reconfiguration are many, for
example, the ability to dynamicallymove demanding functionality
from software to hardware would improve performance of
manyapplications. However, one must consider the time it takes to
reconfigure a section on theFPGA and weigh that against the
potential speed-up. Even tough the possibility of
run-timereconfiguration has existed for over 2 decades now few FPGA
manufactures have yet to providea complete design flow including
design tools and paradigms. Several reasons behind this canbe
found: The main reason is that the number of logic blocks on FPGAs
have increased rapidlyduring this time and hence no direct need for
partial reconfiguration has existed due to the mucheasier process
of implementing a fully static system instead of using function
swapping. Anotherreason is the added development time needed for
the implementation and verification of systemsthat feature partial
reconfiguration. However, as the ICs grow larger so does the time
needed to
12
-
Figure 2.11: Figure showing the general concept of an
FPGA-device. The figure is from thearticle by Kuon et al. [48]
program these. This proves to be troublesome in applications
where start-up timing is crucial,as will be seen later in this
section. Another implication is high static power consumption due
tothe increased number of transistors in each package. By utilizing
smaller FPGAs in combinationwith partial reconfiguration lower
power consumption and, in some cases, higher performancecan be
achieved.
In the book on the subject [44] Koch presents some crucial ideas
behind the concept of partialreconfiguration. Koch separates
between active and passive partial reconfiguration, where
activereconfiguration is when the FPGA is reconfigured during
run-time without disturbing the rest ofthe FPGA and passive
reconfiguration is when the entire FPGA is stopped (stopped in this
caseis when all the clocks in the FPGA are stopped for a period of
time) during reconfiguration. Inthis paper only active partial
reconfiguration is considered and hence will be used
synonymouslywith partial reconfiguration. Furthermore, Koch
presents three open questions on the subjectof partial
reconfiguration that can be seen in the quote below. [44]
1. Methodologies: How can hardware modules be efficiently
integrated into a sys-tem at runtime? How can this be implemented
with present FPGA technol-ogy? And, how can runtime reconfigurable
systems be managed at runtime?
2. Tools: How to implement reconfigurable systems at a high
level of abstractionfor increasing design productivity?
3. Applications: What are the applications that can considerably
benefit fromruntime reconfiguration?
Furthermore, Koch identifies three possible benefits of partial
reconfiguration: Performanceimprovement, Area and power reduction
and fast-system start-up. To summarize: As has beenstated before in
this report algorithms that are highly parallel in nature can
easily achieve speed-up by running on an FPGA compared with a CPU.
By swapping functions in and out of theFPGA dynamically the power
and area used can be reduced. Lastly, fast system start-up refersto
systems where the device must have low start-up times. Partial
reconfiguration can be usedhere to only load crucial components on
the FPGA on start-up in order to minimize the starttime and then at
a later stage load the rest of the functionality on to the FPGA.An
example of
13
-
this can be found in Xilinx Application Note 883 where a FPGA
connected to the PeripheralComponent Interconnect (PCI)-Express bus
is partially configured at boot-up in order to meetthe strict
timing constraints of the bus. [62]
The partial reconfiguration methods can generally be divided
into two categories: differencebased reconfiguration for small net
list changes and module reconfiguration for large module-based
changes. This report will focus on module reconfiguration but
according to Xilinx theirlatest FPGAs ”[..] support reconfiguration
of CLBs (flip flops, look-up tables, distributed Ran-dom Access
Memory (RAM), multiplexers, etc.), block RAM, and Digital Signal
Processor(DSP) blocks, plus all associated routing resources.”
[23]. This would imply that a high level ofgranularity can be
achieved during difference based partial reconfiguration.
Partial reconfiguration can be seen as a specific implementation
of context switching. How-ever, as Koch points one must consider
the entire system state before explicitly labelling
partialreconfiguration as context switching. [44]
Some key words used in the context of partial reconfiguration is
needed to be explainedand elaborated on before a more technical
discussion of partial reconfiguration can occur. Ashort summary of
commonly used terms are presented below and are a summary of the
termsintroduced and described both by Koch [44] and by Xilinx
[35].
Reconfigurable Partition A physical part of the FPGA constrained
by the user to host re-configurable modules.
Reconfigurable Module A net list that is set to reside inside a
reconfigurable partition atsome point. Several modules can share
the same reconfigurable partition.
Reconfigurable Logic Logic elements that make up the
reconfigurable module.
Static Logic Logic implemented in such a way that it is not
reconfigurable.
Proxy Logic Logic inserted by design software in order to
provide the system with a knowncommunication path between static
logic and reconfigurable partitions.
The techniques for placement and interaction of/with
reconfigurable modules within recon-figurable partitions differs
between manufactures but three of the most common ones are:
islandstyle, grid style and slot style. Island style is the
simplest model for partial reconfiguration andis the only one
supported by Xilinx so far and hence it will be the focus of this
report. A figureshowing the concept behind island style placement
can be seen in figure 2.12.
Notice the static region around the reconfigurable module. This
is needed in order to providea safe and efficient way for routing
signals in and out of the reconfigurable module. The staticregion
is extra important when the reconfigurable module is connected to a
bus as it makessure that the bus is not disturbed during
reconfiguration. In Xilinx FPGAs the must commonimplementation of
the static region was so called bus macros that was needed to be
addedmanually by the user in the Integrated Software Environment
(ISE) tool suite during the designphase. These have since been
replaced by proxy LUTs that are automatically inserted duringthe
synthesis. Island style placement only allows for one
reconfigurable module per island. Thismeans that a certain degree
of fragmentation will occur when swapping modules as
resourceswithin the island will be wasted if not all resources are
used by the new module. This is furtherenhanced by the fact that
reconfigurable partitions must be predefined by the user and
hencefinding a perfect partition size in order to avoid
fragmentation may be hard if not impossible.Furthermore, the
current tools on the market require net lists to be generated for
unique pairof module and island. This means that even if the same
module can be placed in two differentislands, two net lists and bit
streams must still be generated. For example, a system that has
6modules and 3 islands where all modules can resist in any island
must have 18 unique net listsand bit streams. This is clearly time
consuming for the designer.
Xilinx states in their user guide for Partial Reconfiguration,
[35] that all logic can be recon-figured during run-time except:
”Clocks and Clock Modifying Logic [...], I/O and I/O related
14
-
Figure 2.12: Figure showing a typical island style partition
location strategy.
components [...], Serial transceivers (MGTs) and related
components [...] and Individual archi-tecture feature components
(such as BSCAN, STARTUP, etc.) must remain in the static regionof
the design”. Further, it is stated that bidirectional interfaces
between static logic and recon-figurable logic are not allowed
unless explicit routes exist. Also some specific IP componentsmight
function erratically if used in combination with partial
reconfiguration. Another designconsideration to notice is that the
interface between the reconfigurable partition and the staticlogic
must be static, as stated earlier, this implies that all
reconfigurable modules that is toreside within a reconfigurable
partition must have the same interface ”out towards” the rest ofthe
FPGA. Ports or bus connections cannot be created on the fly. An
extensive list of designconsiderations for partial reconfiguration
can be found in Xilinx UG702. [35]
In order to use partial reconfiguration on an Xilinx FPGA one
must use their design suiteISE. The work flow to generate and use
partial reconfiguration on a Xilinx FPGA using theXilinx ISE will
be presented in the method-chapter of this report. A general idea
of the partialreconfiguration concept on a Xilinx FPGA can be seen
in figure 2.13. The concept is in depthexplained in work by Khalaf
et al. [43] Designers are forced to use so called
”Bottom-Up-Synthesis” in order to successfully implement a
reconfigurable system. This implies that allmodules must have
separate net lists for each possible instantiation and no
optimization isallowed for the interface between the module and
rest of the FPGA. Bottom-Up-Synthesisis explained in the Partial
Reconfiguration Guide by Xilinx [35] and the Hierarchical
DesignMethodology Guide by Xilinx. [34]
Xilinx states the following design performance in UG702
[35]:
• Performance will vary between designs but in general expect
10% degradation in clockfrequency and not to be able to exceed 80%
in packing density.
• Longer runtimes during synthesis and implementation due to
added constraints.
• Too small reconfigurable partitions may result in routing
problems.
From the user-side, reconfiguration of the FPGA during run-time
is only a matter of writinga partial bit stream to the associated
reconfiguration port. The most commonly used recon-figuration port
in Xilinx-based systems are the ICAP-interface which can be
instantiated as a
15
-
Figure 2.13: Figure showing the outline of the Xilinx RP.
[35]
soft IP-core in the FPGA-fabric. Other reconfiguration
interfaces such as the ZynQ’s ParallelConfiguration Access Port
(PCAP)-interface exists as well. This report focuses on the actual
us-ability of the partial reconfiguration flow and the technical
low-level reconfiguration process willhence not be discussed here.
A good introduction to the partial reconfiguration work flow
andlimitations for Xilinx FPGAs can be found in Partial
Reconfiguration User Guide by Xilinx. [35]
Xilinx claims the following in the Partial Reconfiguration
Reference Design for the Zynq [46]:
The configuration time scales fairly linearly as the bitstream
size grows with thenumber of reconfigurable frames with small
variances depending on the location andthe contents of the
frames.
If the reconfiguration time is linear with respect to the
bitstream size it would imply thatpartial reconfiguration could be
used in time-critical systems as the worst case scenario couldbe
calculated and verified with a high degree of certainty. This
property could be useful inhigh-speed applications such as video
processing or other streaming data applications.
An article from 2006 written by Xilinx employees describes the
general work-flow in theirISE-tool-suite and much of the
information found there still applies to the current versions.
[52]
Heterogeneous systems
A general trend in both research and industry is to use more and
more heterogeneous systems.Heterogeneous systems are composed of
several different processing architectures. An example ofthis is
the Xilinx ZynQ-platform which features two hard ARM-cores and a
large FPGA-sectionin one IC. The Xilinx ZynQ-family of FPGAs will
be discussed later in this chapter. Anotherexample of a
heterogeneous system can be seen in the Related Work-section of
this report, moreprecisely the work of Blair et al. [14].
Heterogeneous systems enables programmers to utilize different
processing architectures dif-ferent properties for different tasks.
For instance, a task that can be run in parallel can be puton an
FPGA while a strongly serial task can be run on the much faster
CPU. However, thesesystems are not without drawbacks. Different
processing architectures use different methods ofexecution and
tasks must be adapted to fit these methods in order work
correctly.
16
-
Computer Vision on FPGAs and heterogeneous systems
The parallel nature of FPGAs makes them ideal for running image
processing algorithms due tothe outline of these algorithms. An
example of this is the conversion between the YUV422-colorformat
and the RGB-color format. The equation for the conversion can be
seen in equation 2.2.RG
B
1 0 1.139831 −0.39465 −0.580601 2.03211 0
YUV
(2.2)If the simple conversion example seen in equation 2.2 would
be run in series it would require
at leastPictureWidth ∗ PictureHeight iterations to finish. For
an image in the VGA-format (640x480pixels) 307200 iterations are
then needed. If this conversion would be implemented on an FPGAall
pixels could be converted at the same time in parallel, that is
only a few iterations would berequired (assuming that the entire
picture is available in the FPGA component at the start ofthe
conversion process, which rarely is the case). One example if this
can be found in the workof Hamid et al. [29] where a filtering
algorithm that took 17 iterations to finish on a CPU onlytook 5
iterations on an FPGA.
Integrating hard processor cores in to FPGAs is no new idea,
however. For example, previousXilinx FPGAs have featured
PowerPC-processors integrated into them (Virtex-IV) and a widerange
of soft CPU-cores exist for integrating in the FPGA-fabric, such as
Microblaze from Xilinxand NIOS from Altera. Using heterogeneous
systems for video processing have several positiveimplications for
the overall system performance and usability as will be seen later
in this report.
Xilinx ZynQ-7000 and Xilinx XC702
This thesis focuses on using partial reconfiguration of the
Xilinx ZynQ-7000 FPGA family.Hence, it is important to discuss the
features and properties of these devices and especiallypresent the
development boards used, the Xilinx ZC702 and GIMME2 that will be
presentedin the next section. Xilinx calls the ZynQ family for a
EPP-family due to the fact that it bothfeatures a ARM-processor and
a FPGA-block in the same package. The general idea of usingthe EPP
is demonstrated in figure 2.15.
An outline of the Xilinx ZynQ-SoC can be seen in 2.16 and a
table showing some of thebasic characteristics of the different
devices in the ZynQ-family can be found in Appendix B.The ZynQ can
generally be divided into two different regions: the PL featuring
the FPGA-fabric and the Processing System (PS) featuring the
ARM-processor. The Xilinx ZynQ SoCfeatures a wide range of embedded
peripherals. The most interesting ones for report are
theDevC-interface (Where the PCAP-interface is located) and the
Advanced eXtensible Interface(AXI)-bus between the PL and the PS.
The AXI bus is a high-performance bus developed andspecified by
ARM. It provides developers with an easy way of interfacing between
the PL andthe PS-sections. The principal layout of the DevC-module
of the Advanced RISC Machine(ARM)-processor on the Zynq can be seen
in figure 2.14.
The latest version of the AXI bus, version 4, have three
distinct implementation: AXI4,AXI4 Lite and AXI4-Stream. The
standard AXI4 bus is a burst based master-slave bus withindependent
channels for read addressing, write addressing, data reception,
data transmissionand transmission response. The width of the data
channels can range from 8 upto 1024 bits.Interconnects are used to
connect masters to slaves, and vice versa, and several masters
canbe connected to the same interconnect. AXI4-Lite is a reduced
version of the standard AXI4bus designed for a more simple
communication method between masters and slaves that is notcapable
of burst reads or writes. The width of the buses are also limited
to either 32 or 64 bits.AXI4-Stream is a stream based communication
interface that is designed for high-performanceapplications such as
video processing. As AXI4-Stream is stream based, it lacks the
addresschannels present in regular AXI4. AXI4-Stream can either be
used as an direct protocol where
17
-
Figure 2.14: The layout of the DevC-module. [38]
a master units writes directly to a slave unit or together with
an interconnect in order to performoperations on the data stream
such as routing or resizing. In order to pass stream based datainto
a memory an extra component is needed and a common technique is to
utilize an DMA-device to perform such operations without the direct
involvement of the processing unit. Thisis common with video
applications where frame buffers are used to store video frames
betweenthe various stages of the video pipeline. More information
about the regular AXI4-protocol andAXI4-Lite can be found in the
specification supplied by ARM. [6] More information about
theAXI4-Stream-protocol can be found in the specification released
by ARM. [5]
The Xilinx ZynQ has integrated AXI-based high performance ports
for PL access of thememory connected to the PS. This allows the two
different sections to share memory. Further-more, other AXI-based
ports are available for communication and peripheral sharing
betweenthe PS and PL sections. Also interrupts and Extended
Multiplexed I/Os (EMIOs) are routedbetween the PL and the PL. More
extensive information about the Xilinx Zynq SoC can befound in the
Technical Reference Manual [38].
Xilinx ZC702 is a development board featuring a Xilinx ZynQ
XC7Z020 SoC and wide rangeof on-board peripherals. A picture
showing these various peripherals can be seen in 2.17
GIMME 2
GIMME2 is an computer vision platform developed by professor
Lars Asplund at MälardalenUniversity and AF Inventions GmbH. The
board features, for example, a Xilinx ZynQ XC7Z020-2 SoC, two
Omnivision OV10810 10-Megapixel image sensors and separate
DDR-memories forthe PL and the PS. A short technical summary of the
board can be seen in figure . The boarditself can be seen in the
figure . The GIMME2 platform is intended to function as a
researchplatform for researchers at Mälardalen University and
other research institutes as well.
18
-
Figure 2.15: Figure showing the general idea on how to utilize
the Xilinx EPP-family. [41]
Figure 2.16: Figure showing the outline of the Xilinx ZynQ-SoC.
Image from Xilinx documentUG585. [38]
19
-
Figure 2.17: Figure showing the ZC702 board peripherals.
[41]
Figure 2.18: Figure showing the outline of the GIMME2 platform.
[3]
20
-
Figure 2.19: Figure showing the GIMME2 boards front (right) and
backside (left). Noticethe two image sensors on the backside of the
PCB (encircled in red). Also notice the ZynqSoC (encircled in
yellow, the PS DDR Memory (encircled in blue) and the PS DDR
Memory(encircled in purple).
21
-
Related work
Implementations of computer vision on FPGAs and heteroge-neous
systems
Utilising the computational power of an FPGA in a mono or stereo
vision system is no newconcept. This concept has been the target of
many researcher’s work throughout the years, forreasons already
accounted for. One interesting, and relevant to this report,
implementation ofcomputer vision on an FPGA is the work of Hosseini
and Hu [29]. Hosseini and Hu compared theperformance of a hard
logic solution against a soft CPU-core (Altera Nios II) implemented
onan FPGA when given the task to filter a 64 x 64 pixel or 256 x
256 pixel grey scale image usinga n x n coefficient matrix. It was
found that the logic FPGA-implementation was immenselyfaster than a
similar implementation on a CPU. The authors found that the logic
based solutioncould perform up to 80 times faster. The results of
this article can be seen in figure 3.1.
Table 3.1: Figure showing the results from work by Hosseini and
Hu. [29] The first four rowsare for the filtering of a 64 x 64
pixel image while the last two are for the filtering a 256 x
256pixel image.
An overview of the algorithm implemented in hard logic and the
algorithm implemented onthe soft CPU-core by Hosseini and Hu can be
seen in figure 3.1.
Another implementation of a computer vision system on an FPGA
can be found in thearticle by Ohmura and Takauji. [55] Ohmura and
Takauji used a stereo-vision system with theOrientation Code
Matching (OCM) algorithm running on an Altera FPGA-chip. In short,
theOCM algorithm is designed to find similarities between pictures
and one possible application isstereo-machining. An extensive
explanation of the OCM algorithm can be found in the samepaper. The
stereo vision module used was capable of supplying images by the
size 752 x 480pixels at 60 FPS. The FPGA on module was an Altera
Cyclone III running at 53 MHz. A figureshowing a block diagram of
the developed system can be seen in figure 3.2. The
implementedsystem performed with a minimal delay but used 82% of
the available Logic Elements on theFPGA. The system used a 16 x 16
pixel template size with a maximum disparity of 127 pixels.A
overview of the algorithm implemented on the FPGA can be seen in
figure 3.3.
Also the work of Komuro et al [47] is an example of an vision
system implemented on a
22
-
Figure 3.1: Figure showing the system from the article by
Hosseini and Hu. [29] To left is thelogic implementation and to the
right is the CPU implementation using the Altera Nios II.
Figure 3.2: System developed by Ohmura and Takauji. Picture is
retrieved from the article byOhmura and Takauji. [55]
heterogeneous system featuring a microprocessor and an FPGA.
They developed a high-speedsystem capable of retrieving 1000 FPS
using a single camera setup. The architecture used canbe seen in
figure 3.4. The camera used were capable of outputting 1280 x 512
pixel frames at1000 FPS. By splitting functionality between the CPU
and the FPGA the team managed to getacceptable performance out of
the system. The implemented system, with the CPU running at266 MHz
and the FPGA at 200 MHz, was compared to an PC with a dual-core
Intel processorrunning at 1.86 GHz and with 3 Gb of RAM. On the PC
OpenCV was used to provide high-levelimage processing capabilities.
In figure 3.2 a comparison between similar functions running onthe
heterogeneous system and on the PC can be seen. It is quite clear
that even though the clockfrequency of the heterogeneous platform
is much lower, it still can outperform the dual-core PCin most of
the cases due to the increased level of parallelism achieved.
Blair et al. [14] present a vision system implemented on a
heterogeneous platform (GPU,FPGAand CPU) for detection of
pedestrians in real-time using a algorithm called HOG (Histogram
ofOriented Gradients). Shortly, HOG works by looking at the
intensity gradients of image pixelsand then uses this data to
detected objects. Blair. et al.’s system was based around an
dual-core Intel processor running at 2.4 GHz, a Xilinx Virtex-6
FPGA and a Nvidia 560Ti GraphicsProcessing Unit (GPU). The devices
were connected together using the PCI Express-bus. Eachstage of the
implementation can run on any of the processing units and mixing
between thedifferent architectures are allowed. Figure 3.5 shows
the possible paths data can take. The per-formance of the system
was evaluated by sending two 1024 x 768 pixel images through all
thedifferent data paths. One of the images were single scale and
the other had 13 scales. The fastestdata path, for both images, was
the one mainly using the GPU, 6.8 ms and 47.0 ms, while the
23
-
Figure 3.3: System developed by Ohmura and Takauji. Picture is
retrieved from the article byOhmura and Takauji. [55]
Figure 3.4: Komuro et al.’s architecture. [47]
slowest one was the one mainly using the CPU, 174.3 ms and 1376
ms. Using mainly the FPGAgives the third best times, 10.1 ms and
124.5 ms. The authors conclude that communicationdelay is a major
problem and combining two processing units in one data flow is not
preferreddue to this. Furthermore, Blair et al. state that it would
be better to, instead of splitting thealgorithm between processing
units, dedicate each processing unit to a specific task and
thencombine the results of each task in the end.
For more information about the implementation and design of
computer vision systems onFPGAs please refer to the comprehensive
book on the subject by Bailey. [9] An overview of thestate of the
art in heterogeneous computing can be found in the work by
Brodtkorb. [15]
Implementations of reconfigurable FPGA-systems
Thoma et al. [63] discusses a method for dynamic pipeline
reconfiguration of a soft core processorimplemented on an FPGA.
Thoma et al. present a novel processor core that can be
reconfiguredwith respect to the depth of the pipeline in order to
increase performance of decrease powerconsumption. The processor
core is based upon an already existing one called LEON3. LEON3is
implemented in VHDL and can hence be used on a FPGA. For more
information aboutLEON3, please refer to the technical paper about
LEON3. [1] By cleverly joining or splittingup adjacent pipeline
stages dynamically, Thoma et al. demonstrated a relative saving of
3,8%in cycle count over the execution of a test program.
In master thesis by Hamre [30] a framework (in principle a
hardware operating system) ispresented for dynamic reconfiguration
of FPGAs. Hamre’s work is closely related to the workpresent in
this report as the same principal ideas are shared. Hamre
thoroughly presents theconcept of partial reconfiguration and also
the difficulties of implementing it. Hamre’s frameworkis designed
to work with Linux and also uses the Xilinx ICAP-port for
reconfiguration. The
24
-
Table 3.2: Komuro et al.’s performance. [47]
Figure 3.5: Blair et al.’s performance. [14]
results show that partial reconfiguration of an FPGA from Linux
is possible with the availabletools. However, no real performance
evaluation is made in Hamre’s report.
In the article by Lesau et al. [50] the usage of real-time
reconfiguration in combination withembedded Linux is discussed and
furthermore a set of tools for easier handling of reconfigurationis
presented. Lesau et al. have successfully implemented tools like
mail-boxes for Linux to hard-ware module communication and also a
hardware administrator that handles reconfiguration.This system was
implemented on an Xilinx Virtex-5 FPGA using MicroBlaze-cores and
PetaL-inux. Lesau et al. successfully proved that this kind of
hardware and software layout could beused for handling dynamic
reconfiguration.
Meyer et al. present a new configuration method for FPGAs in
their article on the subject.[53] The researchers have named it
”Fast start-up”. By manipulating the bit streams generatedthe
regular development tools, Meyer et al. significantly decreased the
configuration time of aXilinx Spartan-6 FPGA. The results from
these tests can be found in table 3.3.
In Ming et al. [51] a comparison between different
ICAP-components are made and thereconfiguration speed versus the
bit-file-size are compared. They found that by making radical
25
-
Table 3.3: Meyer et al.’s results. [53]
changes to the standard ICAP the reconfiguration time could be
lowered by a order of onemagnitude. Ming et al.’s results
(reconfiguration time versus file size) can be seen in table 3.4.In
figure 3.6 one can see the almost linear relationship between bit
file size and reconfigurationtime.
Table 3.4: Table showing Ming et al.’s results taken from their
article. [51]
In the work by Koch et al. [45] present the concept of partial
reconfiguration and also demon-strates some tools commonly used for
achieving it. Furthermore, some possible applications ofpartial
reconfiguration is presented to the reader with one application
being a ”self-adaptivereconfigurable video-processing system”. This
implemented system can be seen in figure 3.7.The modules seen in
the picture can be dynamically loaded and unloaded during run-time.
Thissystem was implemented on an Xilinx Virtex-II FPGA. No
performance indicator is given butit would appear as the
performance of the system is acceptable for non-real time
applications,thus proving that the concept is implementable. Koch
has also published a book on the sub-ject named ”Partial
Reconfiguration on FPGAs” which may be of interest for the reader.
[44]Koch is also the co-author of the article where the
GoAhead-tool for partial reconfiguration ispresented. [10] GoAhead
is aimed to provide developers with a simple user-interface in
order tocreate systems containing reconfigurable modules.
Several other tools and work flows have lately emerged for
creating run-time reconfigurablesystems. For example: Dreams [56],
the work by Ruiz et al. [54] and the work by Dondo etal [22].
Gantel et al. [27] discuss a possible algorithm for module
relocation during run-time. Thework was performed on a Xilinx FPGA
mostly using the Xilinx tool Isolation Design Flow. Themain problem
when dealing with relocation of modules on an FPGA is that each
module musthave an unique bit-stream for each possible module
location on the FPGA. Gantel et al. want tomake it possible to only
have one bit-stream per module and then using a bit-stream parser
andbit-stream re-locator just adapt so that the module can be
placed anywhere on the glsFPGA.This would allow for a more
efficient design. Gantel et al. succeeded with module relocation
on
26
-
Figure 3.6: Figure showing Ming et al.’s results taken from
their article. [51]
the FPGA with their proposed method.Garcia et al. [28] presented
a possible application of reconfigurable FPGAs within Wireless
Sensor Networkss (WSNs).In the work by Papadimitriou et al. [57]
the authors present their solution of providing fast
reconfigurations and also propose a model for cost estimation of
the reconfiguration process.
Implementations of reconfigurable FPGA-systems running com-puter
vision algorithms
Ackermann et al. [2] implemented a self-reconfigurable video
processing system on an FPGA.They present two different
implementations of the system. In the first one a Xilinx
Virtex-IVFPGA is used and reconfiguration was performed with the
help of the ICAP and a Microblaze-processor. Some common image
processing algorithms were implemented as modules used forthe
reconfiguration testing. The first image processing algorithm
implemented was binarization,the second was edge detection using
2-d gradients and the third one was edge detection usinghorizontal
derivative. The bit-streams are here stored on a CompactFlash-card
accessed fromthe MicroBlaze processor. Image data is retrieved from
an camera with a resolution of 2048 x2048 pixels at 16 Frames Per
Second (FPS). For both implementations only one image
processingalgorithm was allowed on the FPGA. An overview of the
first implementation can be seen infigure 3.8. In the second
implementation, the MicroBlaze processor has been removed and
beenreplaced by a small bit-stream controller connected to a Static
Random Access Memory (SRAM)-memory where all bit-streams are
located. The results of the two different implementations canbe
found in figure 3.6 which shows the time needed to reconfigure the
FPGA. The size ofeach implemented processing algorithm can be found
in 3.5. This clearly shows that run-timereconfiguration is possible
even in such demanding systems as video processing systems.
Another implementation of a dynamic reconfiguration in a
multimedia application was pre-sented in the work by Bhandari et
al. [11] Bhandari et al. used a Xilinx Virtex-4 FPGA toimplement a
test-platform where a VGA-camera stream was fed into the FPGA, past
a recon-figurable filter module and then outputted onto a monitor.
Also available on the FPGA wasan audio module that also had a
reconfigurable filter slot. Three programming techniques uti-
27
-
Figure 3.7: Koch et al.’s implemented system. Picture is taken
from the related article. [45]
Table 3.5: Ackermann et al.’s results. [2]
lizing the ICAP were tested. The first two, OPB-HWICAP and
XPS-HWICAP, are made byXilinx while the last one, SEDPRC, is
designed by Bhandari et al. The results of these testscan be seen
in figure 3.7. As can be seen the novel ICAP interface performs
much better thanthe Xilinx alternatives, hence performance of the
ICAP-interface can be improved by utilizingcustom-made
components.
A run-time reconfigurable ”multi-object-tracker” were
implemented by Perschke et al. [58]The system implemented is based
on a Xilinx Virtex 4 FPGA with a PowerPC-CPU and videois retrieved
from a camera running at 384 x 286 pixels and 25 FPS. Just like
Bhandari et al.,Perschke et al. have implemented a new
ICAP-controller in order to improve performance ofthe system as the
standard Xilinx ICAP-controller was deemed to slow to be used. In
figure3.8 the total usage of each component implemented can be
seen. In figure 3.9 the results fromthe article can be found.
Perschke et al. conclude that components can be switched
betweenframes and hence no delay in the object-tracking algorithm
is produced. Looking at the resourceutilization of the components
used and the speed of the switching it can be concluded that
thismethod can be used in high-speed vision systems.
A application for partial reconfiguration within the automotive
industry can be found inworkings by Claus et al. [18] [19] These
studies shows that FPGAs and real-time reconfiguration
28
-
Figure 3.8: Ackermann et al.’s system. [2]
Table 3.6: Ackermann et al.’s results. [2]
can be usefully within the automotive industry as well where
time-constraints are strict andoverall reliability of the system is
a critical factor.
29
-
Table 3.7: Bhandari et al.’s results. [11]
Table 3.8: Perschke et al.’s results. Picture from the related
article. [58]
Table 3.9: Perschke et al.’s results. Picture from the related
article. [58]
30
-
Method
Early work
In order to evaluate partial reconfiguration on the Xilinx ZynQ
FPGA using its associated toolsuite several steps were taken to
prepare and measure interesting aspects. At first the
generalfunctionality of the different development boards were
tested and a basic system featuring partialreconfiguration of one
slot was designed and implemented in order to learn the work flow
inthe different Xilinx tools. This procedure was completed both on
the Xilinx ZC7020 and theGIMME2 board.
The first run-time reconfiguration designs were implemented on
the Xilinx ZC7020 FPGAdevelopment board. In later stages the
designs were moved onto the GIMME2-board. GIMME2[4] is a
stereo-vision platform developed at Mälardalen University by the
Intelligent SensorSystem Group. The latest version of the GIMME
board, version 2, features a Xilinx Zynq-SoC,dual high resolution
cameras etc. GIMME2 was described in the Background-section as was
theZC7020 development board.
After getting to know the tools better the state of the art was
researched by looking intoarticles and research papers from various
scientific databases such Institute of Electrical andElectronics
Engineers (IEEE) Xplore. Linux were downloaded from the Xilinx
git-server in theform of binary files. The possibility to adapt the
Linux Kernel and file system exist and extensiveguides are
available at Xilinx Wiki-page [65].
Design considerations
The technical limitations of partial reconfiguration in its
current state as implemented by Xilinxwere accounted for in the
Background-section of this report. From those limitations
someconclusions can be drawn:
• Modules residing within partitions should have similar
functionality and communicationinterfaces in order to minimize
fragmentation and design problems.
• The size of reconfigurable partitions should be kept as small
as possible in order to minimizefragmentation and free resources
for other components residing in the FPGA.
• Partial reconfiguration should only be used in system that
potentially could benefit fromit drastically. Small performance
improvements are a small gain for the added complexityduring the
design process.
Before starting the implementation of the final reconfigurable
system some technical con-siderations are needed to be dealt with.
As can be seen in Xilinx documents UG470 [39] andWP374 [23] several
different methods exist for configuration and reconfiguration of
Xilinx’s 7series FPGAs. Further, if one consults the technical
reference manual, UG585 [38], of the Zynq7000 SoC, one can see a
clear overview of the various techniques used to program the PL
from thePS. Looking at chapter 6.4.5 in UG585 [38], it is clear
that reconfiguration from the PS using thePCAP is not desirable in
all cases as it would require the AXI interface to be turned off
duringreconfiguration and hence separate the two areas for some
time. This would mean that no datawould be able to be passed to any
component stored in the FPGA from the PS. However, the
31
-
PCAP supports 400 MB/s throughput which means a low
configuration/reconfiguration time.The entire (power-on)
configuration flow for the ZynQ using the PCAP [38] can be seen in
thefirst quote below and the entire reconfiguration flow for the
ZynQ using the PCAP [38] can beseen in the second quote below.
1. Wait for PCFG INIT to be set High by the PL
(STATUS-bit[4])
2. Set internal loopback to 0 (MCTRL–bit[4])
3. Set PCAP PR and PCAP MODE to 1 (CTRL-bit[27 and 26])
4. Initiate a DevC DMA transfer:
(a) Source address: Location of PL bitstream
(b) Destination address: 0xFFFF FFFF
(c) Source length: Total number of 32-bit words in the PL
bitstream
(d) Destination length: Total number of 32-bit words in the PL
bitstream
5. Wait for PCFG DONE to be set High by the PL (INT
STS-bit[2])
1. Disable the AXI interface to the PL.
2. Disable the PL level shifters by writing 0xA to the SLCR LVL
SHFTR ENregister.
3. Set PCAP MODE and PCAP PR High.
4. Clear the previous configuration from the PL (optional):
(a) Set PCFG PROG B High.
(b) Set PCFG PROG B Low.
(c) Check for PCFG INIT = 0 (STATUS-bit[4]).
(d) Set PCFG PROG B High.
5. Check for PCFG INIT = 1 (STATUS-bit[4]).
6. Set INT PCAP LPBK Low (MCTRL-bit[4]).
7. Initiate a DevC DMA transfer:
(a) Source Address: Location of new PL bitstream.
(b) Destination Address: 0xFFFF FFFF.
(c) Source Length: Total number of 32-bit words in the new PL
bitstream.
(d) Destination Length: Total number of 32-bit words in the new
PL bitstream.
8. Clear PCFG DONE INT by writing a 1 to the INT STS[2].
9. Wait for PCFG DONE INT to be set High.
10. Enable the PL level shifters by writing 0xF to the SLCR LVL
SHFTR ENregister.
11. Enable the AXI interface to the PL.
A more flexible solution can be found in WP374 [23], where a
logic component in the FPGAtakes care of the reconfiguration
mechanism and hence efficiently hides it from the PS. A
simplemicro-controller, such as a Xilinx Microblaze, or some
state-machine could be in charge ofreconfiguration and accept
reconfiguration requests from the PS on the AXI bus. Partial
bit-files would then be stored at known memory locations and as the
bit-files are hard-area-coded noreconfiguration could affect other
logic on the FPGA then the logic meant to be affected. Thissystem
would resemble the one presented in the work by Hamre. [30] Then
the only time thePCAP will be used is during boot-up when the
base-system bit-file is loaded on to the FPGA.After the
initialisation of the FPGA is completed all reconfigurations will
be handled by thelogic in the FPGA. A sketch of this concept can be
seen in figure 4.1.
However, little to none documentation exists for using the
glsICAP-component on the Zynqand developing such a system turned
out to be troublesome as will be seen later in this text.
32
-
Figure 4.1: Figure showing the Partial Reconfiguration flow from
WP374. [23]
The main issue lies in the fact that the Zynq already has a
built-in configuration/reconfigurationport, the PCAP, and that the
configuration interfaces are mutually exclusive. The control
ofwhich configuration interface that is active is done via a
register in the PS and must be setcorrectly before the ICAP or PCAP
can be used. [38]
If one consults the Xilinx Application note XAPP1159 [46],
especially table 2, some typicalreconfiguration times using the
PCAP-interface can be found. From Linux a partial reconfigu-ration
time of 2 milliseconds are specified. If such a low reconfiguration
time can be achievedusing the PCAP then it could be acceptable to
turn off the AXI-bus interface for that period oftime. However,
Xilinx writes in the text the 2 ms only includes the actual
”beginning and endof the DevC DMA transfer driver function call”.
Hence some steps of the reconfiguration flowis not included in this
time. These excluded steps can be seen in figure 4.2. Still it is
interestingto see the performance of the partial reconfiguration
flow both from Linux and from so calledstand-alone software.
Another interesting problem one is faced with when dealing with
partial reconfigurationis how to synthesize each reconfigurable
module in an efficient way. Each module needs tobe synthesized
independently in order to get partial reconfiguration to work
properly. Xilinxmethod to performing this is to ensure that the all
the components that shall be able to resideinside a reconfigurable
partition have the same interfaces towards the rest of the FPGA and
thenimporting each component into the Embedded Development Kit
(EDK)-environment. There bychanging the component instantiation in
the mhs-file associated to the project between synthesisruns each
component gets a net-list generated. This set of net lists are then
exported to thePartial Reconfiguration project in Planahead. This
methodology may seem clumsy at best butit has proven to work
without any major malfunctions. Another approach is to use
componentinstantiations in the HDL-files and then directly edit
these instantiations between synthesis runs.As Xilinx enforces the
Bottom-Up-Synthesis methodology users can synthesise modules
usingany synthesis tool. However, Input/Output (I/O) insertion must
be disabled during synthesis as
33
-
Figure 4.2: Excluded partial reconfiguration steps from XAPP1159
shown in red. [46]
the modules pins will no be connected to package pins but the
static logic of each partition. [35]For this report the EDK method
was mostly used as it seemed smoother but work flow using aseparate
synthesis tool was also tested and confirmed to work.
As stated earlier, a reconfigurable partition consists of two
parts: (1) the static logic and (2)the reconfigurable module
itself. [35] In order to guarantee successful partial
reconfiguration thestatic logic for all modules residing in a
partition must be identical after implementation. In theXilinx ISE
tool suite this checked with the Verify-tool in Planahead. After
reconfigur