Embed Size (px)
Citation preview
Evaluation of Exchanging Time for Mechanism of Exchanging
Parts of Programs during Execution
Hideo Taniguchi and Masataka Goto
Graduate School of Information Science and Electrical Engineering, Kyushu University, Fukuoka, 812-8581 Japan
SUMMARY
The authors describe the relationship with program
characteristics for a method of exchanging the parts of a
program during execution. They then formulate the ex-
changing time and the thread stoppage time during which
the thread is stopped so it can be exchanged. In application
programs that share execution units (threads) allocated in a
processor or in the case of operating system programs that
can be preempted, parts of several programs must be ex-
changed at the same time. These program parts are shared
among many threads. The exchanging time rises along with
the processing time for the program part to be exchanged,
and the impact on the number of threads which a program
shares is minimal. The thread stoppage time during
which a thread is stopped so it can be exchanged rises
along with the number of shared threads and the process-
ing time for the program parts to be exchanged. The
formulation for the exchanging time and the thread stop-
page time is shown to have results similar to real meas-
urements. © 2001 Scripta Technica, Syst Comp Jpn,
32(8): 53�62, 2001
Key words: Reliability; software; program; process.
1. Introduction
Computers are becoming faster and more complex.
In addition, software is intimately related to achieving
quality of service. As a result, attempts to repair software
problems and improve functionality are made from time to
time. In terms of service, it would be extremely beneficial
to be able to make such changes to software while a pro-
gram is being executed.
One method to alter a program while it is being run
as a process is a method [1] of structuring a process redun-
dantly and then exchanging the program in process units.
In this method, the entire process must be exchanged even
if only a portion is being altered, because the exchange is
performed in process units. On the other hand, there have
been reports of a method [2] of exchanging part of a
program while a process is being executed. However, these
methods must consider the timeliness of the exchange for
the service program being exchanged and must rely on the
operating system (OS). As a result, the creation of a service
program that is aware of the timeliness of the exchange
becomes necessary. In addition, if several processes created
from the same program are running, then the program
process structure becomes complex.
The authors propose a method with two major char-
acteristics as a method to alter part of a program being run
as a process [3, 4]. The first is that the service program does
not need to be aware of the timeliness of the exchange. The
second is that program exchange is possible even when the
part of the program being exchanged calls a separate part
of the program not being exchanged.
On the other hand, programs include application
programs running as processes (AP) and OS programs. In
Refs. 3 and 4, an exchanging method for APs is described,
but nothing regarding OS programs is mentioned. In addi-
tion, the time during which the process is stopped for the
© 2001 Scripta Technica
Systems and Computers in Japan, Vol. 32, No. 8, 2001Translated from Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J82-D-I, No. 8, August 1999, pp. 998�1007
53
exchange is not described. The order of exchanging time
for APs is clarified in Refs. 3 and 4, but this issue remains
unclear for OS programs. In particular, because the extent
of sharing for OS programs is high, there is a possibility
that the exchanging time will be larger.
Thus, in this paper the authors classify the charac-
teristics of programs, including both AP and OS pro-
grams, and then present a relationship for the exchanging
method. The authors then consider both AP and OS
programs, and formalize the exchanging time and the
time during which a process is stopped for an exchange,
and finally further clarify the features of the exchanging
method. In addition, they demonstrate the validity of
their formulation through comparisons with real-world
measurements.
2. Program Characteristics
A program that is being shared can be broken down
into the following two categories based on the execution
format resulting from the execution units (referred to as
threads) allocated by the processor.
(Category 1) Program parts which are executed using
several threads at the same time.
(Category 2) Program parts for which one and only
one thread is executed at a time.
In Category 1, program parts are shared among
threads, and context exchanges occur in the applicable
program parts. This holds for program parts that are
not controlled nonexclusively and for many APs. In
addition, this also holds for OS programs that enable
preempting for execution rights when being run in
kernel mode, as is represented by real-time OSs. In
Category 2, program parts are shared among threads,
but context exchanges do not occur in the applicable
program parts. This holds for OS programs which do
not allow for the preempting of execution rights when
being run in kernel mode and for program parts that
are controlled nonexclusively.
When viewed from the perspective of exchanging,
the program parts in Category 2 are the same as when the
status of the program parts [4] is not shared, although the
sharing of program parts between threads is not performed.
Here, in Ref. 4, the status of the program part can be one of
the following: not used, being run, or being called. Not used
represents a status prior to execution or after the completion
of execution. Being run represents a status in which execu-
tion is under way, and being called represents a status in
which a separate program part is being called. As a result,
the module status that can be created for the Category 2
program part is a portion of the module status that can be
created for the Category 1 program part. Thus, hereafter the
Category 1 program part will be used. In addition, the
program part will be referred to as a module, and the
program part being exchanged will be referred to as an
exchange module.
Next, AP and OS programs will be compared. An AP
has the following features.
(1) Several different APs are executed at the same
time.
(2) Each program part during execution is handled as
follows.
(a) Text segments are shared among processes started
from the same AP.
(b) Data segments have parts that are not shared with
other processes and parts that are shared with related proc-
esses.
(c) Stack segments are not shared with other proc-
esses.
(3) Preempting of execution rights during the execu-
tion of a program can occur.
In contrast, an OS program has the following fea-
tures.
(1) Two OS programs cannot be run at the same time.
(2) The program is shared by all processes.
(3) Some OSs allow for preempting of execution
rights when a program is being executed and others do not.
(4) Some parts are always being used as exchange
parts with execution rights.
In addition, compared to an OS program, an AP does
not place heavy demands on execution time. On the other
hand, an OS program does place heavy demands on execu-
tion time.
In this fashion, an AP and an OS program are sub-
stantially different. However, when viewed from the per-
spective of exchanging programs, only the extent of sharing
and the size and number of modules are different. There-
fore, using these differences as parameters, if the exchang-
ing time and the time effects on service can be clarified
when several modules are exchanged at once and modules
are shared among various threads, then the characteristics
of exchanging can be understood for both AP and OS
programs.
3. Formulation
3.1. Exchanging time
3.1.1. Formulation
In order to formalize the exchanging time, the follow-
ing assumptions must be made.
54

(Assumption 1) Exchanging is possible when the
module status is unused or being called.
(Assumption 2) The status is acquired when the pro-
gram starts.
(Assumption 3) Exchange requests can be issued for
several modules at the same time.
(Assumption 4) After an exchange request, execution
cannot be transferred to the exchange module.
(Assumption 5) Modules are shared among all
threads.
As indicated in Ref. 4, here the module status can be
classified as �not used,� �being run,� or �being called.�
�Being run� modules cannot be exchanged. Assumption 1
is an assumption that considers this point. Also, acquiring
the module status can start before an exchange request or
when a program launches. In either case, the maximum
value for the interval during which control is transferred
among modules in the program overall affects the exchang-
ing time. When starting just before an exchange request,
temporary effects on the run status when an exchange
request is received can readily occur. As a result, this effect
must be eliminated (Assumption 2). Assumption 4 depends
on the structure of the authors� proposed exchanging
method. Assumption 3 is an assumption that considers
convenience, that is, being able to make requests once and
not again and again for each module for which a program
exchange is to be performed. Assumption 5 assumes the OS
program shares modules among all threads. For an AP
program, the number of threads shared by the modules may
be considered instead of Assumption 5, but in this case, the
exchanging time has been shown to be shorter than the time
when modules are shared among all threads [4]. As a result,
Assumption 5 is used.
In addition, the following prerequisites apply.
(Prerequisite 1) All modules are called without bias.
(Prerequisite 2) Execution is performed using the
number of threads running and the same number of proces-
sors. In other words, module processing time does not rise
due to an increase in the number of threads running.
These two prerequisites make the formulation sim-
pler. A case in which Prerequisite 1 is removed from con-
sideration is explained later as an approximation of call bias
with the number of modules. A case in which Prerequisite
2 is removed from consideration is also explained later.
Modules to be exchanged are referred to as A = {A1,
A2, . . . , Ax}, and modules that are not to be exchanged are
referred to as B = {B1, B2, . . . , By). Figure 1 shows this
situation. The arrows in Fig. 1 indicate the transfer of
running modules for threads, in the form of calls to modules
and returns from modules, and may vary depending on the
program structure. In addition, the number of running
threads is n; the expected value for the processing time for
the modules to be exchanged A is a = a1 + a2 + ����� + ax (ai:
the expected value for the time at which the thread stops at
Ai); and the expected value for the processing time for the
modules not to be exchanged B is b = b1 + b2 + ����� + by (bi:
the expected value for the time at which the thread stops at
Bi).
At first, the timeout time is infinitely large, as per
Assumption 4. The expected value TA for the exchanging
time when a running thread is needed for the exchanged
module can be found as follows. If the expected value for
the number of threads when the exchanged module Ai is
running is set to nAi, then given the condition that a running
thread is needed for the module to be exchanged and
Prerequisite 1,
The expected value for the time required for nAi threads
being run in the exchanged module Ai to perform the
module transition is TAi. TA
i is the time elapsing between the
issuing of a request for an exchange of module Ai and the
time at which the exchange becomes possible, and can be
found as follows. When a thread performs the processing
for module Ai in time t, the time required for the module
transition is ai � t, based on Prerequisite 2. The probability
that nAi threads are found in the interval [t, ai] can be
expressed as ��ai � t� /ai�nAi. When this condition is satisfied,
the probability of the time from when an exchange request
Fig. 1. Connection among modules.
55
for module Ai is issued to when it can be performed for the
time ai � t for the module transition of the thread in the
interval [t, t + 't] is �nAi � 't� / �ai � t�. Therefore, the ex-
pected value for TAi is
The exchanging time is the time required for all
Ai�i 1, 2, . . . , x� to be able to be exchanged. In other
words, the maximum value for TAi�i 1, 2, . . . , x� is
equivalent to the exchanging time. Therefore, TA is
Next we will find the exchanging time TB when no
threads are present in the exchanged module when an
exchange is requested. The number of threads running the
set of modules B not to be exchanged is represented by nB.
Because of the condition that the threads running the mod-
ules not to be exchanged, nB n. Here, the processing time
relationship for the modules not to be exchanged is
b1 L b2 L . . . L by. The probability that more than time t will
be required to complete processing in all current modules
is ��b � yt� / b�n when 0 L t L b1, and �6j iy �bj � t� /b�n when
bi�1 L t L bi�i 2, 3, . . . , y�. In addition, the probability
that a process is present over the interval [t, t + 't] is
n �y � 't� / �b � yt� when 0 L t L b1, and n ��y � i � 1� �
't� /6j iy �bj � t� when bi�1 L t L bi�i 2, 3, . . . , y�. Given
that the exchanging time is t under these conditions, TB is
Here, if the processing time for the case in which the
modules not to be exchanged can be approximated using
the average value b/y is replaced with TBg , then
Finally, we will find the general exchanging time T.
The probability that TB is valid is �b / �a � b��n and the
probability that TA is valid is 1 � �b / �a � b��n. Therefore,
the general exchanging time T based on Assumptions 1
through 4 and Prerequisites 1 and 2 is
3.1.2. Evaluation and discussion
Based on T obtained in the previous section, the
exchanging time will be evaluated from three perspectives:
the number of threads, the number of modules, and the
module processing time.
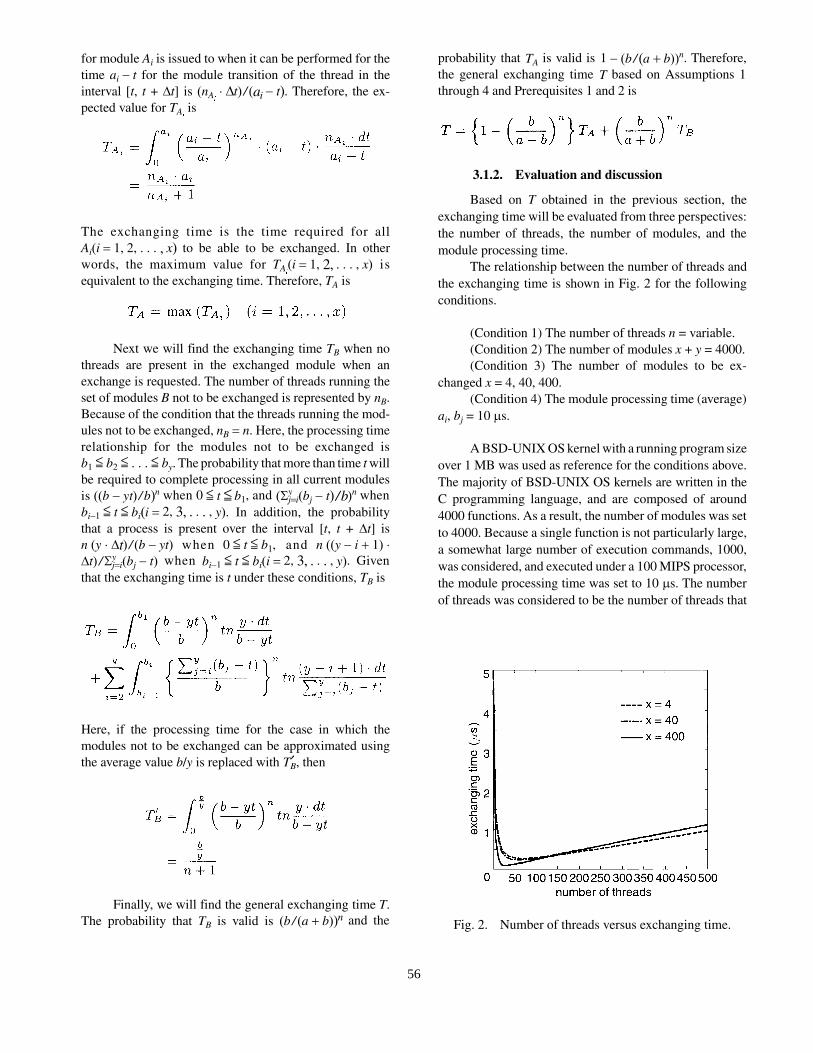
The relationship between the number of threads and
the exchanging time is shown in Fig. 2 for the following
conditions.
(Condition 1) The number of threads n = variable.
(Condition 2) The number of modules x + y = 4000.
(Condition 3) The number of modules to be ex-
changed x = 4, 40, 400.
(Condition 4) The module processing time (average)
ai, bj = 10 Ps.
A BSD-UNIX OS kernel with a running program size
over 1 MB was used as reference for the conditions above.
The majority of BSD-UNIX OS kernels are written in the
C programming language, and are composed of around
4000 functions. As a result, the number of modules was set
to 4000. Because a single function is not particularly large,
a somewhat large number of execution commands, 1000,
was considered, and executed under a 100 MIPS processor,
the module processing time was set to 10 Ps. The number
of threads was considered to be the number of threads that
Fig. 2. Number of threads versus exchanging time.
56
can run simultaneously on a single computer, and the maxi-
mum for this number was set to 500. Here the OS kernel
was used for reference, and the number of modules and the
number of threads were set very high. For an AP program,
these values would usually be smaller, and the exchanging
time would also be briefer. In addition, because of rapid
increases in processor performance accompanied by pro-
grams becoming more modular in recent years, the module
processing time would often be less than 10 Ps. Given the
above, the evaluation below can be considered to be close
to a worst case.
Figure 2 shows the relationship for x = 4, x = 40, and
x = 400, that is, for the three cases in which the portion of
the overall program to be exchanged is 0.1%, 1%, or 10%.
Based on Fig. 2, when the number of threads rises, the
exchanging time drops briefly, and then rises. The exchang-
ing time when there are 100 threads is shorter than for 3 or
4. When the number of threads is low, the probability that
a thread is in the module to be exchanged during an ex-
change request is low. As a result, the exchanging time
affects TB significantly. TB is a monotonically decreasing
function with respect to the number of threads, and so the
exchanging time falls as the number of threads rises. When
the number of threads is large, the exchanging time affects
TA significantly. TA is a monotonically increasing function
with respect to the number of threads, and so the exchang-
ing time rises as the number of threads rises. The number
of modules to be exchanged only affects the ratio of TA and
TB with respect to T, and does not affect the values of TA
and TB. As a result, differences in x have little effect on the
exchanging time.
Figure 3 shows the relationship between the exchang-
ing time and the module processing time under the condi-
tions noted below. Here, the scale of the program overall is
considered using the total module processing time. Thus,
because the scale of the program overall is the product of
the number of modules and the module processing time, the
scale of the program overall in Fig. 2 is 40,000 Ps. The scale
of the program overall is the same as in Fig. 2, so Conditions
2 and 4 apply.
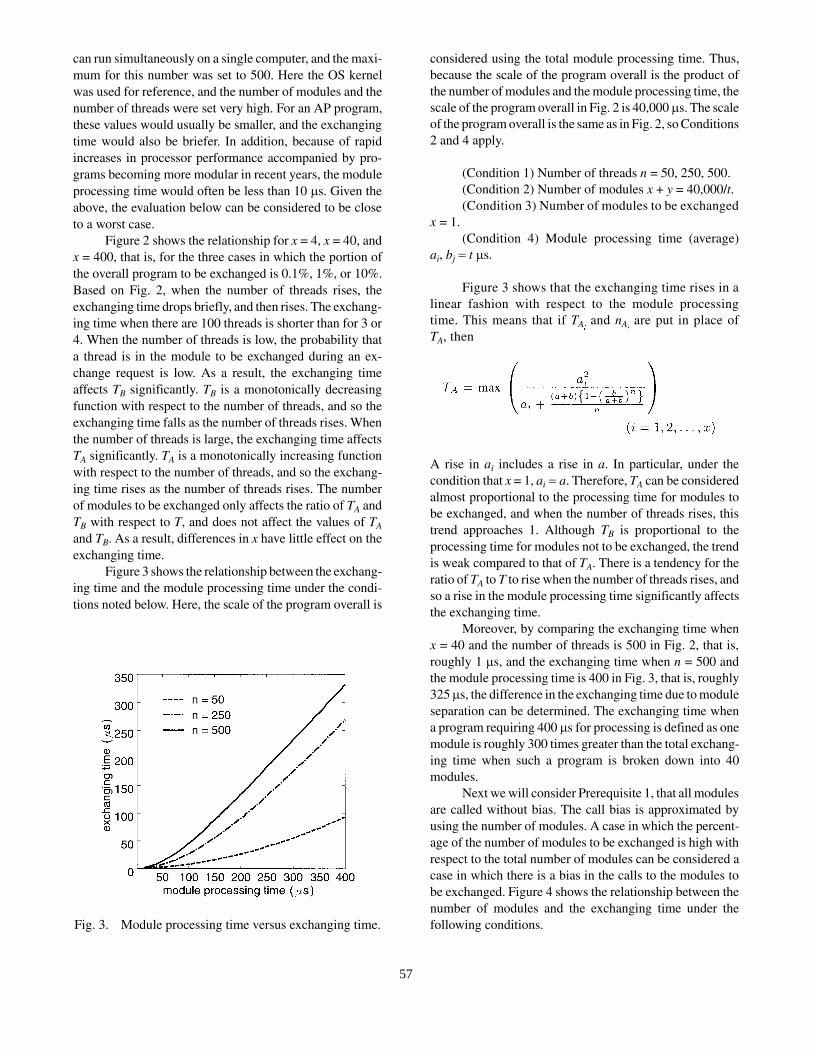
(Condition 1) Number of threads n = 50, 250, 500.
(Condition 2) Number of modules x + y = 40,000/t.
(Condition 3) Number of modules to be exchanged
x = 1.
(Condition 4) Module processing time (average)
ai, bj t Ps.
Figure 3 shows that the exchanging time rises in a
linear fashion with respect to the module processing
time. This means that if TAi and nA
i are put in place of
TA, then
A rise in ai includes a rise in a. In particular, under the
condition that x = 1, ai a. Therefore, TA can be considered
almost proportional to the processing time for modules to
be exchanged, and when the number of threads rises, this
trend approaches 1. Although TB is proportional to the
processing time for modules not to be exchanged, the trend
is weak compared to that of TA. There is a tendency for the
ratio of TA to T to rise when the number of threads rises, and
so a rise in the module processing time significantly affects
the exchanging time.
Moreover, by comparing the exchanging time when
x = 40 and the number of threads is 500 in Fig. 2, that is,
roughly 1 Ps, and the exchanging time when n = 500 and
the module processing time is 400 in Fig. 3, that is, roughly
325 Ps, the difference in the exchanging time due to module
separation can be determined. The exchanging time when
a program requiring 400 Ps for processing is defined as one
module is roughly 300 times greater than the total exchang-
ing time when such a program is broken down into 40
modules.
Next we will consider Prerequisite 1, that all modules
are called without bias. The call bias is approximated by
using the number of modules. A case in which the percent-
age of the number of modules to be exchanged is high with
respect to the total number of modules can be considered a
case in which there is a bias in the calls to the modules to
be exchanged. Figure 4 shows the relationship between the
number of modules and the exchanging time under the
following conditions.Fig. 3. Module processing time versus exchanging time.
57
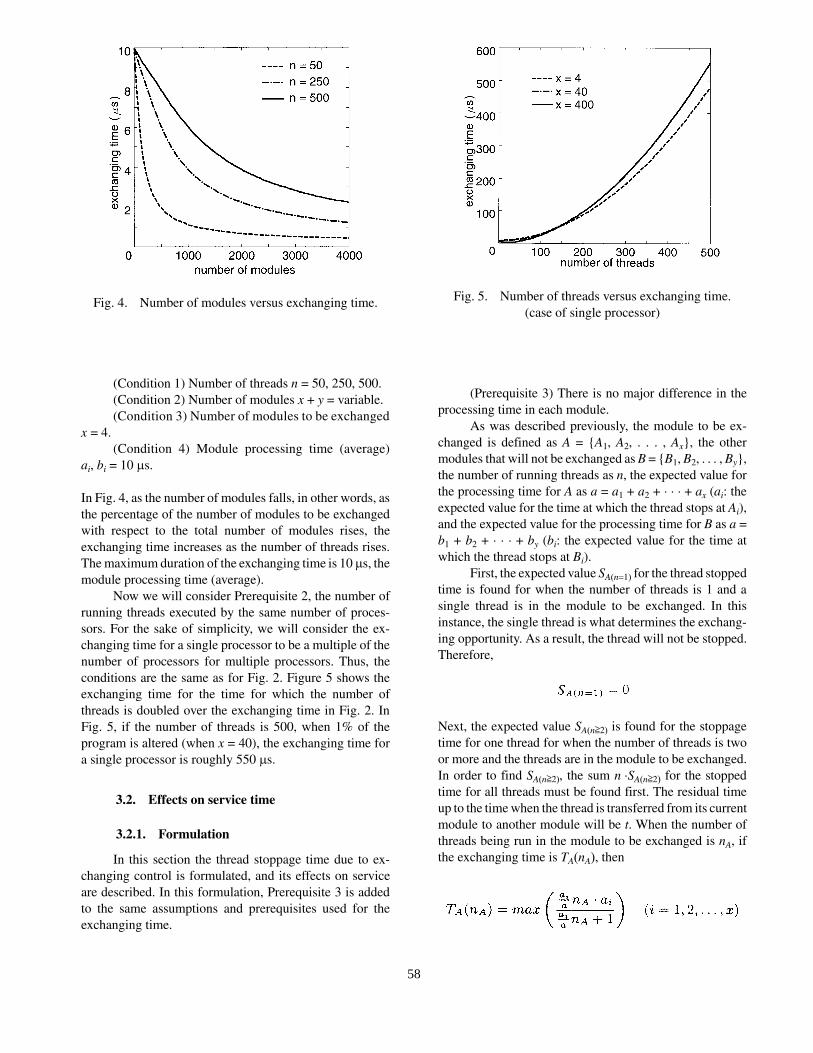
(Condition 1) Number of threads n = 50, 250, 500.
(Condition 2) Number of modules x + y = variable.
(Condition 3) Number of modules to be exchanged
x = 4.
(Condition 4) Module processing time (average)
ai, bi = 10 Ps.
In Fig. 4, as the number of modules falls, in other words, as
the percentage of the number of modules to be exchanged
with respect to the total number of modules rises, the
exchanging time increases as the number of threads rises.
The maximum duration of the exchanging time is 10 Ps, the
module processing time (average).
Now we will consider Prerequisite 2, the number of
running threads executed by the same number of proces-
sors. For the sake of simplicity, we will consider the ex-
changing time for a single processor to be a multiple of the
number of processors for multiple processors. Thus, the
conditions are the same as for Fig. 2. Figure 5 shows the
exchanging time for the time for which the number of
threads is doubled over the exchanging time in Fig. 2. In
Fig. 5, if the number of threads is 500, when 1% of the
program is altered (when x = 40), the exchanging time for
a single processor is roughly 550 Ps.
3.2. Effects on service time
3.2.1. Formulation
In this section the thread stoppage time due to ex-
changing control is formulated, and its effects on service
are described. In this formulation, Prerequisite 3 is added
to the same assumptions and prerequisites used for the
exchanging time.
(Prerequisite 3) There is no major difference in the
processing time in each module.
As was described previously, the module to be ex-
changed is defined as A = {A1, A2, . . . , Ax}, the other
modules that will not be exchanged as B = {B1, B2, . . . , By},
the number of running threads as n, the expected value for
the processing time for A as a = a1 + a2 + ����� + ax (ai: the
expected value for the time at which the thread stops at Ai),
and the expected value for the processing time for B as a =
b1 + b2 + �� �� � + by (bi: the expected value for the time at
which the thread stops at Bi).
First, the expected value SA�n 1� for the thread stopped
time is found for when the number of threads is 1 and a
single thread is in the module to be exchanged. In this
instance, the single thread is what determines the exchang-
ing opportunity. As a result, the thread will not be stopped.
Therefore,
Next, the expected value SA�nM2� is found for the stoppage
time for one thread for when the number of threads is two
or more and the threads are in the module to be exchanged.
In order to find SA�nM2�, the sum n �SA�nM2� for the stopped
time for all threads must be found first. The residual time
up to the time when the thread is transferred from its current
module to another module will be t. When the number of
threads being run in the module to be exchanged is nA, if
the exchanging time is TA�nA�, then
Fig. 4. Number of modules versus exchanging time.Fig. 5. Number of threads versus exchanging time.
(case of single processor)
58

Given Assumption 4, the thread stoppage time is the time
from when the transfer to the module to be exchanged starts
to when the exchange is finished. In addition, given Prereq-
uisite 3, the module transfer over the interval from exchange
request to exchange completion is under one time for a
thread. Therefore, the thread stopped time can be repre-
sented as TA�nA� � t. Based on Prerequisite 1, the prob-
ability that the transfer destination for the module being
transferred is the module being exchanged is x/(x + y). The
expected value for the number of threads in the interval
[t, t � 't] for the module Ai to be exchanged is
nA �ai / a� � �'t /ai� nA �'t / a�. Therefore, when the num-
ber of threads being run in the module to be exchanged is
nA (note that nA M 0�, if the expected value for the total sum
of the thread stopped times in the module to be exchanged
is set to SAA�nA�,
The probability that nA threads are in the module to be
exchanged is n! /nA!�n � nA�! �a /a � b�nA �b /a � b�n�nA.
Given this, if the expected value for the sum of the thread
stopped times in the module to be exchanged is set to SAA,
then
In the same fashion, if the expected value for the total sum
of the thread stopped time in the modules not being ex-
changed is set to SAB, then
Given the above, n � SA�nM2� is
Therefore, the expected value SA�nM2� for the stoppage time
for one thread when there are two or more threads and the
running threads are in the module to be exchanged is
Next we will find the expected value SB for the thread
stoppage time when the thread is not in the module to be
exchanged. In this instance, the module is executed with the
thread which first arrives at the module boundary, and as a
result, there is no stopped thread. Thus,
Finally, let us find the general thread stopped time S.
The probability that a thread is not present in the module to
be exchanged is �b / �a � b��n, and the probability that a
thread is present in the module to be exchanged is
1 � �b / �a � b��n. Therefore, based on Assumptions 1
through 4 and Prerequisites 1 and 2, the general thread
stoppage time S is
3.2.2. Evaluation and discussion
Based on S obtained in the previous section, the
thread stopped time will be evaluated from three perspec-
tives: the number of threads, the number of modules, and
the module processing time.
Figure 6 shows the relationship between the number
of threads and the thread stoppage time under the same
conditions as in Fig. 2. Figure 6 shows that a rise in the
number of threads increases the thread stoppage time. Be-
cause a rise in the number of threads increases the coeffi-
cient SA�nM2�, the thread stoppage time will tend to increase
as a result of the rise in the number of threads. In addition,
the percentage of parts being exchanged with respect to the
program overall and the probability that a thread being
transferred in a module will be stopped are the same: x/(x
+ y). As a result, a rise in the percentage of the parts being
exchanged with respect to the program overall will increase
the probability that a thread being transferred in a module
will be stopped. As a result, the rise in thread stopped time
with respect to the number of threads is sharp.
However, even when 10% of the program overall is
exchanged, the thread stoppage time is small at only 0.1%
of the module processing time.
Figure 7 shows the relationship between the thread
stoppage time and the module processing time under the
59
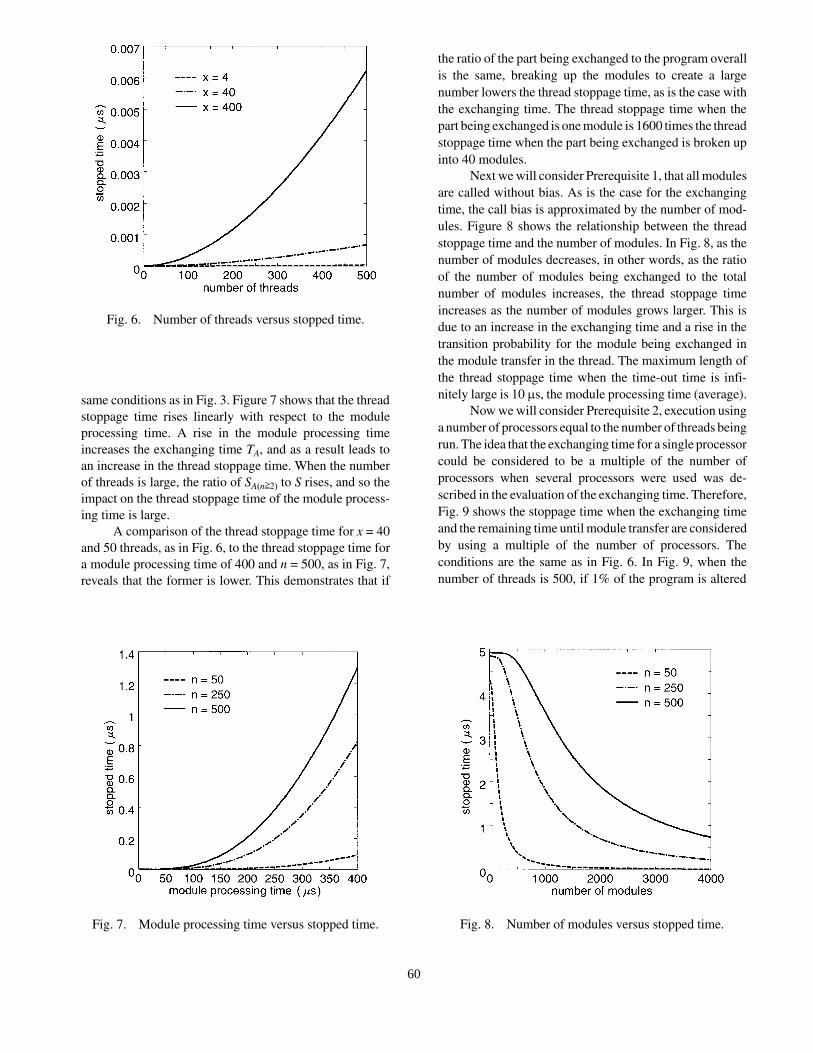
same conditions as in Fig. 3. Figure 7 shows that the thread
stoppage time rises linearly with respect to the module
processing time. A rise in the module processing time
increases the exchanging time TA, and as a result leads to
an increase in the thread stoppage time. When the number
of threads is large, the ratio of SA�nM2� to S rises, and so the
impact on the thread stoppage time of the module process-
ing time is large.
A comparison of the thread stoppage time for x = 40
and 50 threads, as in Fig. 6, to the thread stoppage time for
a module processing time of 400 and n = 500, as in Fig. 7,
reveals that the former is lower. This demonstrates that if
the ratio of the part being exchanged to the program overall
is the same, breaking up the modules to create a large
number lowers the thread stoppage time, as is the case with
the exchanging time. The thread stoppage time when the
part being exchanged is one module is 1600 times the thread
stoppage time when the part being exchanged is broken up
into 40 modules.
Next we will consider Prerequisite 1, that all modules
are called without bias. As is the case for the exchanging
time, the call bias is approximated by the number of mod-
ules. Figure 8 shows the relationship between the thread
stoppage time and the number of modules. In Fig. 8, as the
number of modules decreases, in other words, as the ratio
of the number of modules being exchanged to the total
number of modules increases, the thread stoppage time
increases as the number of modules grows larger. This is
due to an increase in the exchanging time and a rise in the
transition probability for the module being exchanged in
the module transfer in the thread. The maximum length of
the thread stoppage time when the time-out time is infi-
nitely large is 10 Ps, the module processing time (average).
Now we will consider Prerequisite 2, execution using
a number of processors equal to the number of threads being
run. The idea that the exchanging time for a single processor
could be considered to be a multiple of the number of
processors when several processors were used was de-
scribed in the evaluation of the exchanging time. Therefore,
Fig. 9 shows the stoppage time when the exchanging time
and the remaining time until module transfer are considered
by using a multiple of the number of processors. The
conditions are the same as in Fig. 6. In Fig. 9, when the
number of threads is 500, if 1% of the program is altered
Fig. 6. Number of threads versus stopped time.
Fig. 7. Module processing time versus stopped time. Fig. 8. Number of modules versus stopped time.
60
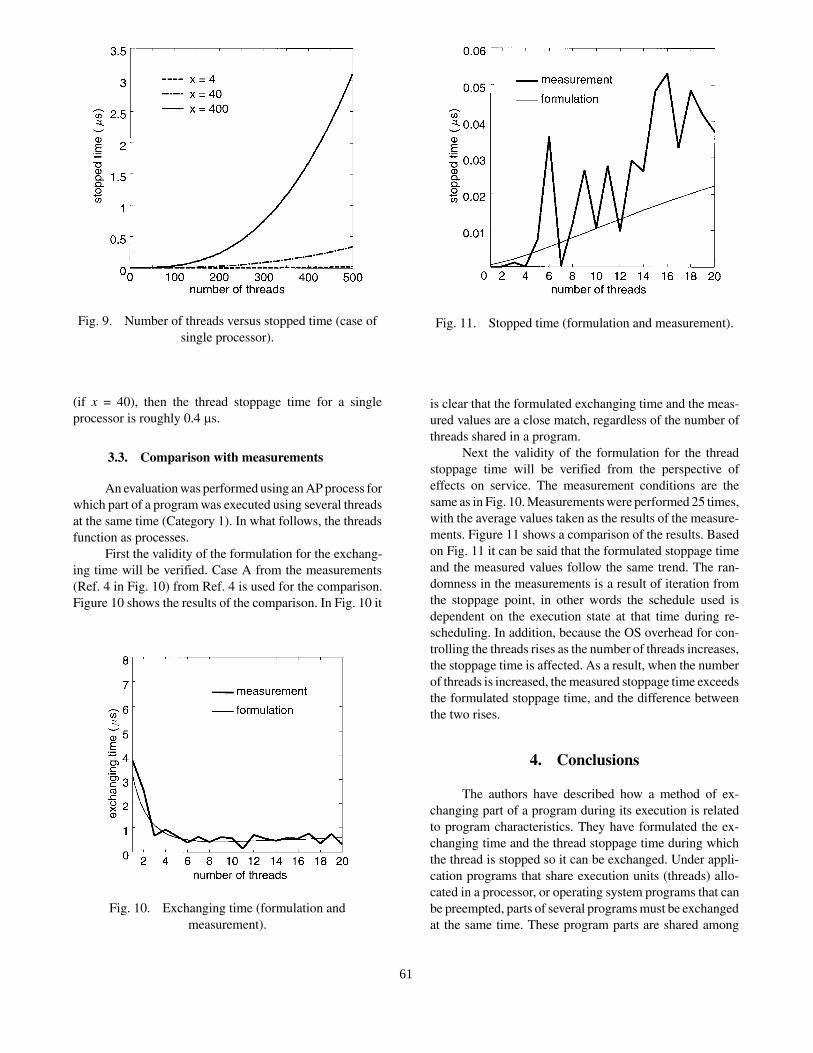
(if x = 40), then the thread stoppage time for a single
processor is roughly 0.4 Ps.
3.3. Comparison with measurements
An evaluation was performed using an AP process for
which part of a program was executed using several threads
at the same time (Category 1). In what follows, the threads
function as processes.
First the validity of the formulation for the exchang-
ing time will be verified. Case A from the measurements
(Ref. 4 in Fig. 10) from Ref. 4 is used for the comparison.
Figure 10 shows the results of the comparison. In Fig. 10 it
is clear that the formulated exchanging time and the meas-
ured values are a close match, regardless of the number of
threads shared in a program.
Next the validity of the formulation for the thread
stoppage time will be verified from the perspective of
effects on service. The measurement conditions are the
same as in Fig. 10. Measurements were performed 25 times,
with the average values taken as the results of the measure-
ments. Figure 11 shows a comparison of the results. Based
on Fig. 11 it can be said that the formulated stoppage time
and the measured values follow the same trend. The ran-
domness in the measurements is a result of iteration from
the stoppage point, in other words the schedule used is
dependent on the execution state at that time during re-
scheduling. In addition, because the OS overhead for con-
trolling the threads rises as the number of threads increases,
the stoppage time is affected. As a result, when the number
of threads is increased, the measured stoppage time exceeds
the formulated stoppage time, and the difference between
the two rises.
4. Conclusions
The authors have described how a method of ex-
changing part of a program during its execution is related
to program characteristics. They have formulated the ex-
changing time and the thread stoppage time during which
the thread is stopped so it can be exchanged. Under appli-
cation programs that share execution units (threads) allo-
cated in a processor, or operating system programs that can
be preempted, parts of several programs must be exchanged
at the same time. These program parts are shared among
Fig. 9. Number of threads versus stopped time (case of
single processor).
Fig. 10. Exchanging time (formulation and
measurement).
Fig. 11. Stopped time (formulation and measurement).
61
many threads. The formulation shows that the exchanging
time rises along with the processing time for the program
part to be exchanged, and that the impact on the number of
threads which a program shares is minimal. In addition, the
thread stoppage time during which a thread is stopped so
that it can be exchanged is shown to rise along with the
number of shared threads and the processing time for the
program parts to be exchanged. Both of these are consistent
with intuitive interpretations. The authors have demon-
strated the validity of their formulation through compari-
sons with real measurements. According to the formulation,
when the number of threads being run at the same time is
500, the exchanging time when 1% of a program is being
altered is roughly 550 Ps. In addition, the thread stoppage
time for exchanging under these conditions is roughly 0.4
Ps.
A remaining topic is the evaluation of a method to
swap a part of a program being executed with a different
program. The validity of this method must be clarified
through a comparison with the exchanging method.
Acknowledgment. The authors would like to ex-
press their gratitude to Mr. Raita Nakajima of the Graduate
School of Information Science and Electrical Engineering
at Kyushu University for his cooperation in the preparation
of this paper.
REFERENCES
1. Muramatsu H, Date M, Yoshida H, Kitaoka M, Kuro-
bane N. Operating system SXO for continuous op-
eration. IFIP 92, Vol. 1, p 615�621.
2. Snead B, Ho F, Engram B. Operating system features
real time and fault tolerance. Computer Design, p
177�185, Aug. 1984.
3. Taniguchi H, Ito K, Ushijima K. A parts exchanging
method for programs during process execution. Trans
IEICE 1995;J78-D-I:492�499.
4. Taniguchi H, Goto M. A parts exchanging method for
programs shared in processes being run. Trans IEICE
1997;J80-D-I:495�504.
AUTHORS (from left to right)
Hideo Taniguchi (member) received his B.E., M.E., and Ph.D. degrees in computer science from Kyushu University in
1978, 1980, and 1991. He joined NTT Electrical Communication Laboratories in 1980, and moved to the Research and
Development Headquarters of NTT Data Communications Systems Corp. in 1988. After becoming an associate professor of
computer science at Kyushu University in 1993, he has been an associate professor in the Graduate School of Information
Science and Electrical Engineering since 1996. His research interests include operating system, real-time processing, and
distributed processing. He is the author of Operating Systems (Shokodo). He is a member of the Information Processing Society
of Japan, IEICE, and ACM.
Masataka Goto received his B.E. and M.E. degrees from Kyushu University in 1995 and 1997. He then joined the
Communication and Information Systems Research Labs., Research and Development Center, Toshiba. His research interests
include operating systems and secure communication over the Internet. He is a member of the Information Processing Society
of Japan.
62