-
Evaluation of Distributed Query-Based Monitoringover Data
Distribution Service
Márton Búr∗, Dániel Varró∗†‡∗McGill University, Montreal,
Canada
[email protected], [email protected]†MTA-BME
Lendület Cyber-Physical Systems Research Group, Budapest,
Hungary
‡ Budapest University of Technology and Economics, Budapest,
Hungary
Abstract—Safety assurance in critical IoT systems is
increas-ingly important as those systems are becoming ubiquitous
invarious application areas, such as health care and
transportation.Recently, novel runtime monitoring approaches
started to adaptexpressive rule- or query-based languages to
capture safetyproperties, which are evaluated over runtime models.
In thispaper, we define two distributed query-based runtime
monitoringstrategies for IoT and cyber-physical systems built on
top of adistributed runtime model deployed over the Data
DistributionService as standard communication middleware. We
providedetailed scalability evaluation of our prototype
implementationover a case study motivated by an open-source IoT
demonstrator.
Index Terms—Runtime models, Distributed queries,
RuntimeMonitoring, Data Distribution Service (DDS)
I. INTRODUCTION
Motivation: Critical Internet-of-things and
cyber-physicalsystems (CPS) [1]–[3] frequently need to provide
autonomousbehavior with complex interaction with its uncertain
envi-ronment using intelligent data processing techniques over
aheterogeneous computation platform. In such systems,
runtimeverification (RV) [4], [5] is frequently used to ensure
safeoperation by monitoring. Recent RV approaches like startedto
exploit rule-based [6], [7] or query-based [7] techniquesover a
richer (relational or graph-based) information model.
Runtime models (also known as [email protected] [8], [9])provide
such a rich knowledge representation to capture theruntime state of
the application data, services and platformsin the form of typed
and attributed graphs [10] to serveas a unifying semantic basis for
various kinds of analysistechniques. For example, runtime models
have been used forthe assurance of self-adaptive systems (SAS) in
[11], [12].
In a distributed CPS over a resource constrained platform,the
underlying runtime model also needs to be distributed, andupdated
with high frequency driven by the incoming sensorinformation and
the changes in network topology.
Problem statement: In our previous work [7], we demon-strated
the feasibility of query-based runtime monitoring, i.e.to define
runtime monitors captured in a highly expressivedeclarative graph
query language executed over a distributedruntime model deployed to
a physical CPS platform. However,this approach used an ad hoc
runtime model managementlayer (using low-level sockets for
communication) while only
an initial performance evaluation was carried out with
fewparticipants and medium-sized models. In [13], we
adapteddistributed runtime models over a standard middleware
of(real-time) data distributed service (DDS) [14].
Objectives: Our current work provides a scalability eval-uation
of different query evaluation strategies used for runtimemonitoring
over a distributed runtime model which can bedeployed over
resource-constrained fog computing [15] envi-ronment. Our
experimental evaluation is carried out on a casestudy motivated by
the MoDeS3 CPS demonstrator (Model-Based Demonstrator for Smart and
Safe Cyber-Physical Sys-tems) [16], which is an open source
educational platform. Inparticular, this paper provides the
following contributions:
• We define single executor (coordinator-driven) and mul-tiple
executor (decentralized) monitoring strategies forevaluating graph
queries over distributed runtime models.
• We provide prototype implementation of both strategiesover a
standard industrial DDS middleware.
• We carry out detailed scalability evaluation of this
pro-totype implementation for increasing model size, numberof
participants and certain configuration parameters.
II. PRELIMINARIES: DISTRIBUTED RUNTIME MODELS
This section provides the modeling foundations for query-based
runtime monitoring. We revisit definitions related todistributed
runtime models based on our previous work [7].
A. Domain-specific modeling languages
In domain-specific (modeling) languages (DSLs), a domainis often
defined by a metamodel including main conceptssuch as classes,
attributes, and relations captured in theform of graph models and a
set of structural consistencyconstraints. A metamodel can be
formalized as a vocabularyΣ = {C1, . . . ,Cn1 ,A1, . . . ,An2 ,R1,
. . . ,Rn3} with a unarypredicate symbol Ci for each class, a
binary predicate symbolAj for each attribute, and a binary
predicate symbol Rk foreach relation in the metamodel.
Example: Figure 1 shows a metamodel for the MoDeS3demonstrator
with Participants (identified in the networkby hostID attribute)
which host the DomainElements. ADomainElement is either a Train or
RailroadElement. ATrain has a speed attribute and the train is
always located on978-1-5386-4980-0/19/$31.00 c⃝2019 IEEE
683
-
Participant
hostID : EInt
RailRoadElement
ModelRoot
Segment
isEnabled : EBoolean
Turnout
Train
speed : EInt
DomainElement
[0..*] participants
[0..1] straight [0..1] divergent
[0..*]domainElements
[0..*] hosts
[1..1] on[0..1] left
[0..1] right
Fig. 1: Metamodel for MoDeS3
Fig. 2: Distributed runtime model for MoDeS3
a RailroadElement. Turnouts and Segments are Railroad-Elements
with links to the left and right side RailroadEle-ments. These left
and right references are used to describe theactual connections
between the different RailroadElements.A Turnout has references to
RailroadElements that representthe straight and divergent
directions.
B. Distributed runtime (graph) models
We carry out runtime monitoring over runtime models [7]which
serve as rich knowledge representation of the obser-vations,
internal state and the environment of the system inoperation. The
runtime model is distributed along participantsthe physical system
and connected via the network [13]. Theseparticipants process the
data provided by their correspondingsensors, and they are able to
perform edge- or cloud-basedcomputations on the data. The runtime
model managementcomponents are deployed and executed on the
platform ele-ments, thus resource constraints need to be respected
duringallocation. The communication middleware needs to ensurefast
and reliable communication between the components.
Formally, a runtime model M = ⟨DomM , IM ⟩ is a logicstructure
over Σ, as in [17], where DomM is a finite setof objects and
elementary data values (integers, strings, etc.)in the model. IM is
a 2-valued interpretation of predicatesymbols in Σ defined as
follows (where op, oq representobjects and ap represents an
attribute value):
• Class predicates: If object op is an instance of class Ci,then
the interpretation of Ci in M evaluates to 1 denotedby
[[Ci(op)]]
M= 1, and it evaluates to 0 otherwise.
• Attribute predicate: If there is an attribute of type Aj inop
with value ar in M , then [[Aj(op, ar)]]
M= 1, and 0
otherwise.• Reference predicates: If there is a link of type Rk
from
op to oq in M , then [[Rk(op, oq)]]M
= 1, otherwise 0.In our distributed runtime model [7], each
participant has
up-to-date but incomplete knowledge about the distributed
system. Moreover, we assume that each model object isexclusively
managed by a single participant, referred to asthe host of that
element, which serves as the single source oftruth. This way, each
participant can make calculations (e.g.execute a monitor locally)
based on its own view of the system,and it is able to modify the
mutable properties of its hostedmodel elements. Formally, for a
predicate P with parametersv1, . . . , vn, [[P (v1, . . . ,
vn)]]
M@p denotes its value over the
distributed runtime model M is stored by host p.Example: Figure
2 shows a snapshot of the distributed
runtime model M for the MoDeS3 system. Participants de-ployed to
three different physical computing units managedifferent parts of
the system. The model captures the threeparticipants (Participant 1
– Participant 3) deployed to thecomputing units, the domain
elements (s1–s8, tu1, tu2, tr1,and tr2) as well as the links
between them. Each participanthosts model elements contained within
them in the figure, e.g.Participant 2 is responsible for storing
attributes and outgoingreferences of objects s3, s4, s5, and
tr1.
C. Real-time Data Distribution Service
Both model update and monitoring messages are sent be-tween the
components over a middleware using a publish-subscribe protocol
that implements the real-time data distri-bution service (RDDS
[18]). RDDS is an extension for theDDS standard [14] of the Object
Management Group (OMG)to unify common practices concerning
data-centric commu-nication using a publish-subscribe architecture.
Furthermore,the middleware also abstracts from the platform and
network-specific details, and it can provide quality of service
(QoS)and quality of data (QoD) guarantees. Thus, in the
currentpaper, we assume reliable and timely delivery of messages
bythe underlying middleware.
III. QUERY-BASED MONITORING
A. Graph queries for specifying safety monitors
As proposed in [7], we rely on the VIATRA Query Lan-guage (VQL)
[19] to capture the monitored properties. Thisdeclarative graph
query language allows to capture safetyproperties on a high level
of abstraction over the runtimemodel, which eases the definition
and comprehension ofsafety monitors for engineers and avoids
accidental complexitycaused by additional platform-specific or
deployment details.While graph queries can be extended to express
temporalbehavior [20], this work is restricted to safety properties
wherethe violation of a property is expressible by graph
queries.
The expressiveness of VQL converges to first-order logicwith
transitive closure, thus it provides a rich language forcapturing a
variety of complex structural conditions and depen-dencies. Any
match (result) of a graph query over the runtimemodel highlights a
violation of the safety property. Formally,a graph query φ(v1, . .
. , vn) can be evaluated over a runtimemodel M (denoted by [[φ(v1,
. . . , vn)]]
MZ ) along a variable
binding from variables to objects and data values in M (i.e.,Z :
{v1, . . . , vn} → DomM ) in accordance with the semantic
684
-
rules defined in [17]. A variable binding Z is called a match
ifquery φ is evaluated to 1 over M , i.e. [[φ(v1, . . . , vn)]]
MZ = 1.
Example: In the railway domain, safety standards pre-scribe a
minimum distance between trains on track [21], [22].The closeTrains
monitor definition captures a (simplified)description of the
minimum headway distance to identify vio-lating situations where
trains have only limited space betweeneach other. Technically, one
needs to detect if there are twodifferent trains on two different
railroad elements, which areconnected by a third railroad element.
Any match of thispattern highlights track elements where passing
trains need tobe stopped immediately. Listing 1 shows the
monitoring querycloseTrains in textual VQL syntax and Listing 2
displays itas a graph formula.
pattern closeTrains (start : RailroadElement, end :
RailroadElement) {
Train.on(train_1,start);Train.on(train_2,end);train_1 !=
train_2;RailroadElement.connectedTo(start,
middle);RailroadElement.connectedTo(middle, end);start != end;
}
Listing 1: Monitoring goal in the VIATRA Query Language
CloseTrains(start, end) =RailroadElement(start) ∧
RailroadElement(end)∧∃train1 : Train(train1 ) ∧ On(train1 ,
start)∧∃train2 : Train(train2 ) ∧ On(train2 , end)∧¬(train1 =
train2 )∧∃middle : RailroadElement(middle) ∧
ConnectedTo(start,middle)∧ConnectedTo(mid, end)∧¬(start = end)
Listing 2: Monitoring goal as a formula
B. Monitor execution
Our system-level runtime monitoring framework is hierar-chical
and distributed. Monitors may observe the local runtimemodel of a
participant, and they can collect informationfrom runtime models of
different participants. Moreover, onemonitor may request
information from other monitors, thusyielding a hierarchical
network.
Monitors compute matches of a graph query φ(v1, . . . , vn)along
a search plan by assigning model objects to variablesv1, . . . , vn
and evaluating the predicate of the query. A searchplan is an
ordered list of search operations (e.g. checkingtype of objects,
navigating along references) that traverses theruntime graph model
in order to find all complete variablebindings satisfying the query
condition. The search plan forφ(v1, . . . , vn) also depends on the
initial binding informationfor the input parameters (provided by
the caller) as a variablewith a fixed value can greatly reduce the
search space.
Example: The pseudo code in Algorithm 1 sketchesthe
implementation for finding all matches of closeTrains ifinput
parameters (start and end in L1) are unbound. Unboundinput
parameters and variables that are not assigned a valueare
represented with NULL. In L2 the set matches serves asthe container
of the results and is initialized empty. In thefollowing line (L3),
the if-statement ensures that both input
parameters are unbound. The search algorithm is shown in L4-L13.
It starts with a loop that binds objects of type RailRoad-Element
to variable start. Lines 5-6 show navigation along thetrain
reference starting from start. If an object of type Trainis present
on start, the search continues by navigating twicealong the
connectedTo reference in each possible way, again,from start and
binding variable end (L7-L9). In L10-L11 thepresence of a train is
checked on end. Finally, if both train1and train1 are bound to
different train objects (L12), a matchis found and in ⟨start , end⟩
is added to matches in L13.
Algorithm 1 Compute results of closeTrains1: input: start, end2:
matches ← ∅3: if start = NULL and end = NULL then4: for start in
{all RailRoadElement objects} do5: train1 ← start .train()6: if
train1 ̸= NULL then7: for middle in start.connectedTo() do8: for
end in middle.connectedTo() do9: if start ̸= end then
10: train2 ← end .train()11: if train2 ̸= NULL then12: if train1
̸= train2 then13: matches .add(⟨start , end⟩)
The complete matching algorithm of closeTrains needs tohandle
initial variable bindings (e.g. end ̸= NULL) which isomitted here
for space considerations.
In distributed query-based monitoring, a significant chal-lenge
in executing search plans is to manage navigation alongreferences
and reading an attribute values of objects hosted byother
participants. Additionally, we wish to allow that monitorsinitiated
by an arbitrary participant can return all violations inthe whole
system. We have identified two possible approachesto support these
requirements:
• Single executor: a single participant executes all stepsof the
search plan while accessing information storedat other
participants, which can be achieved by a syn-chronous remote
procedure call implementation overDDS. The request message conveys
i) what reference/at-tribute value of ii) what object is requested
and iii) bywhich participant, while the reply message
encapsulatesthe i) object identifier and ii) an array of
values.
• Multiple executors: the participant which initiates
theexecution of a monitor will not directly request informa-tion
from other participants. Instead, if a remote object isencountered
and its reference/attribute value is queried,the partial variable
bindings are asynchronously passedto the other participant, which
continues the execution ofthe search plan. The request message
needs to contain i)an auto-generated unique request identifier, ii)
the partialvariable binding, iii) the next step in the search plan
andiv) the requester participant ID. Once the other
participantreceives this message, it continues the matching and
685
-
finally, it returns all found matches to the requester ina reply
message with i) the set of matches and ii) therequest
identifier.
IV. EVALUATION
We evaluated the scalability of query-based runtime moni-toring
using these execution strategies with respect to increas-ing (a)
model size, and (b) number of participants, and (c)certain
configuration parameters of the DDS middleware.
A. Benchmark setup
1) CPS monitoring benchmark: To assess the distributedruntime
verification framework, we used the MoDeS3 railwayCPS demonstrator
[16] where multiple safety properties aremonitored. They are all
based on important aspects of thedomain. The monitoring goals of
interest are the following:
• CloseTrains: see example in subsection III-A.• Derailment: a
train approaches a turnout that is set to the
opposite direction (causing the train to derail).• EndOfSiding:
a train approaches an end of the track.• TrainLocations: highlight
segments with a train.
Since the original runtime model of the CPS demonstratorhas only
a total of 49 objects, we scaled up the model byreplicating the
original elements (except for the computingunits). This way we
obtained models with 140 – 1.4M objectshaving similar structural
properties as the original one.
2) Technical details: We synthesized the C++ monitors forthe
MoDeS3 case study. As DDS implementation, we builtupon RTI Connext
Professional, which is currently consideredto be the leading
Industrial IoT connectivity framework.
We used a quality of service profile called High
Throughputdefined in the RTI Connext DDS library which provides an
ini-tial configuration designed for applications that require
reliabledata streaming at a high data rate. This profile improves
theperformance by allowing the middleware to buffer
applicationmessages and send them together in a single transport
layermessage, which is a UDPv4 datagram in our case. We
slightlytailored this profile to better fit monitoring purposes,
namely i)we added a deadline to force flushing the content of the
bufferto the network at least every 100ms to avoid ”stuck”
messagesand ii) we disabled the shared memory transport to
achievemore realistic network throughput with communication
overUDPv4.
We ran our distributed monitors in isolation but within thesame
physical host. We used Docker1 to manage applicationcontainers, and
assigned a dedicated virtual network interfaceto allow
communication between the containers. The hostingcomputer was a
single server machine with 32 CPU cores.
Every single data point in the diagrams of this sectiondisplays
results of 20 consecutive runs. A data point isobtained by removing
the lowest and highest measured value,then taking the average of
the remaining 18.
1https://www.docker.com/
10-participants
0.01
0.1
1
140 1400 14000 140000 1400000
Exec
uti
on
tim
e (s
)
Model size (number of objects)
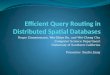
CloseTrains Derailment EndOfSiding TrainLocations
Page 1
Fig. 3: Query execution times in a network of 10
participants
B. Experiment results
We only provide an excerpt of our findings in this section,while
a complete export of conducted measurement data isavailable
online2.
1) Scalability wrt. model sizes: In our previous work,
weconducted an initial evaluation of our query-based
monitoringapproach deployed to a network of six physical single
boardcomputers [7] with 43K objects. Figure 3 summarizes our
re-sults over a DDS middleware with 10 participants and
multipleexecutors. It shows scalability up to 1.4 million objects
withsimilar runtime as reported in [7], which highlights that
graphpattern matching scales well when deployed over an
industrialDDS middleware. However, the single executor strategy
failedto scale by providing 3-4 orders of magnitude slower
executiontimes (for only 2 participants and 14K objects).
2) Scalability wrt. number of participants: The next sce-nario
investigates the impact of increasing the number ofparticipants on
query evaluation time. The results for Close-Trains and Derailment
monitors are depicted in Figures 4a and4b, respectively. The x-axis
shows the increasing model sizeswhile the y-axis depicts execution
time for 2, 5, 10 and 20participants.
The results show negligible difference in execution timeswith
increasing number of participants in case of the selectedtwo
monitors. This leads us to the conclusion that the systemscales
well for higher degrees of distribution.
3) Impact of batching DDS messages: The default setting inthe
High Throughput DDS profile allows application messagebuffering.
This buffer is packed in a single UDPv4 datagramonce it reaches
30kB and sent over the network. With thisset of experiments, we
investigated how this buffer sizeimpacts query evaluation
performance. The results are shownin Figure 5a for CloseTrains and
in Figure 5b for Derailmentwith two and five participants.
Buffering messages slows down query execution for modelswith
less than 14K objects. However, buffering can improveexecution run
time for certain monitors over models with morethan 14K elements
(e.g. in case of Derailment) and will notdegrade run time in others
(like in case of CloseTrains).
2https://imbur.github.io/cps-query/
686
-
closeTrains-2-5-10-20
0.01
0.1
1
140 1400 14000 140000 1400000
Exec
uti
on
tim
e (s
)
Model size (number of objects)
2 participants 5 participants 10 participants 20
participants
Page 1
(a) CloseTrains monitor execution times
derailment-2-5-10-20
0.01
0.1
1
140 1400 14000 140000 1400000
Exec
uti
on
tim
e (s
)
Model size (number of objects)
2 participants 5 participants 10 participants 20
participants
Page 1
(b) Derailment monitor execution times
Fig. 4: Monitor execution times with multiple participants
closetrains-buffer
0.001
0.01
0.1
1
140 1400 14000 140000 1400000
Exec
uti
on
tim
e (s
)
Model size (number of objects)
30kB buffer, 2 participants 30kB buffer, 5 participants
3kB buffer, 2 participants 3kB buffer, 5 participants
0kB buffer, 2 participants 0kB buffer, 5 participants
Page 1
(a) CloseTrains monitor execution times
derailment-buffer
0.001
0.01
0.1
1
10
140 1400 14000 140000 1400000
Exec
uti
on
tim
e (s
)
Model size (number of objects)
30kB buffer, 2 participants 30kB buffer, 5 participants
3kB buffer, 2 participants 3kB buffer, 5 participants
0kB buffer, 2 participants 0kB buffer, 5 participants
Page 1
(b) Derailment monitor execution times
Fig. 5: Impact of varying DDS message buffer sizes
V. RELATED WORK
We overview related papers covering distributed modelqueries,
runtime verification of distributed systems and IoTmonitoring
frameworks.
Distributed model queries: The authors of [23] provide atoolset
called GreyCat for maintaining and analyzing temporalgraphs over
arbitrary storage technologies, such as in-memorystores or NoSQL
databases. The IncQuery-D framework [24]provides support for
distributed incremental model queries. Itbuilds an in-memory
middleware layer on top of a distributedmodel storage system, and
uses the Rete algorithm [25] forincremental maintenance of query
results.
As a key difference, these distributed graph query
evaluationtechniques use a cloud-based execution environment, thus
theyare not directly applicable for a heterogeneous execution
IoTplatform with low-memory computation units.
Runtime verification of distributed systems: Classicalruntime
verification approaches supporting distributed systems[26]–[28]
frequently use temporal logic for specifying safetyproperties and
expected behavior, which excel in tempo-ral properties over atomic
predicates but they typically fail
to express complex structural requirements. Evaluating
suchcomplex structural properties over a distributed data model
is,in fact, a main added value of our query-based approach.
Brace [29] is a framework for distributed runtime verifica-tion
of CPSs that imposes low runtime overhead on the systemunder
monitor. However, global properties are monitored by adedicated
central entity, which is different from our solution,where any of
the participants can initiate and collect monitor-ing results from
the whole system.
IoT monitoring frameworks: A cloud-centric vision forInternet of
Things is presented in [30], which is a dominantapproach in
healthcare IoT applications. Typically, data col-lection from the
environment is carried out at the edge of thenetwork, then
intelligent processing is performed on a cloudplatform [31], [32].
However, our focus differs from this intwo ways, namely i) all the
processing is done on the networkedge and ii) the monitoring focus
is on the system propertiesitself, and not on the environment.
VI. CONCLUSION AND FUTURE WORKIn this paper, we defined two
strategies for distributed query-
based runtime monitoring over a distributed runtime model
687
-
used in the context of critical CPS and IoT applications. Weused
the standard Data Distribution Service as an underly-ing
communication middleware for runtime monitors, whichprovides QoS
and QoD guarantees. We carried out detailedscalability evaluations
using our prototype ( implemented inC++) in the context of an open
educational IoT demonstrator,which showed favorable results both
with increasing numberof participants (up to 20 participants) and
increasing modelsize (with 1.4 million objects).
As a future work, we are planning on enhance the singleexecutor
strategy by adding support to asynchronously requestinformation
about the runtime model of other participants. Thiswould enable
parallel search execution by utilizing the timethat is now spent on
waiting for remote calls to complete.
ACKNOWLEDGMENT
This paper is partially supported by MTA-BME
LendületCyber-Physical Systems Research Group, the NSERC
RGPIN-04573-16 project, and the McConnell Memorial Fellowship(as
part of the MEDA program). The authors would like tothank Gábor
Szárnyas the help on providing the evaluationenvironment.
REFERENCES
[1] C. Krupitzer, F. M. Roth, S. VanSyckel, G. Schiele, and C.
Becker, “Asurvey on engineering approaches for self-adaptive
systems,” Perv. Mob.Comput., vol. 17, pp. 184–206, feb 2015.
[2] C. B. Nielsen, P. G. Larsen, J. S. Fitzgerald, J. Woodcock,
and J. Pe-leska, “Systems of systems engineering: Basic concepts,
model-basedtechniques, and research directions,” ACM Comput. Surv.,
vol. 48, no. 2,p. 18, 2015.
[3] J. Sztipanovits, X. Koutsoukos, G. Karsai, N. Kottenstette,
P. Antsaklis,V. Gupta, B. Goodwine, and J. Baras, “Toward a science
of cyber-physical system integration,” Proceedings of the IEEE,
vol. 100, no. 1,pp. 29–44, 2012.
[4] M. Leucker and C. Schallhart, “A brief account of runtime
verification,”J. Log. Algebr. Program., vol. 78, no. 5, pp.
293–303, 2009.
[5] S. Mitsch and A. Platzer, “ModelPlex: Verified runtime
validation ofverified cyber-physical system models,” in Intl.
Conference on RuntimeVerification, 2014.
[6] K. Havelund, “Rule-based runtime verification revisited,”
Int. J. Softw.Tools Technol. Transfer, vol. 17, no. 2, pp. 143–170,
2015.
[7] M. Búr, G. Szilágyi, A. Vörös, and D. Varró,
“Distributed graph queriesfor runtime monitoring of cyber-physical
systems,” in 21st Interna-tional Conference on Fundamental
Approaches to Software Engineering(FASE), 2018, pp. 111–128.
[8] G. S. Blair, N. Bencomo, and R. B. France,
“[email protected],” IEEEComputer, vol. 42, no. 10, pp. 22–27,
2009.
[9] M. Szvetits and U. Zdun, “Systematic literature review of
the objectives,techniques, kinds, and architectures of models at
runtime,” Softw. Syst.Model., vol. 15, no. 1, 2013.
[10] H. Ehrig, K. Ehrig, U. Prange, and G. Taentzer,
“Fundamentals ofalgebraic graph transformation (monographs in
theoretical computerscience. an eatcs series). secaucus,” 2006.
[11] B. H. C. Cheng, K. I. Eder, M. Gogolla, L. Grunske, M.
Litoiu, H. A.Müller, P. Pelliccione, A. Perini, N. A. Qureshi, B.
Rumpe, D. Schneider,F. Trollmann, and N. M. Villegas, “Using models
at runtime to addressassurance for self-adaptive systems,” in
[email protected], 2011, pp.101–136.
[12] T. Vogel and H. Giese, “Model-driven engineering of
self-adaptive soft-ware with EUREMA,” ACM Transactions on
Autonomous and AdaptiveSystems (TAAS), vol. 8, no. 4, p. 18,
2014.
[13] M. Búr, G. Szilágyi, A. Vörös, and D. Varró,
“[email protected] for runtime verification of
cyber-physicalsystems,” preprint. [Online]. Available:
https://imbur.github.io/cps-query/sttt18-runtime-models.pdf
[14] G. Pardo-Castellote, “OMG Data-Distribution Service:
Architecturaloverview,” in Proc. 23rd Int. Conf Distrib. Comput.
Syst. Workshops,2003.
[15] F. Bonomi and R. Milito, “Fog computing and its role in the
internet ofthings,” Proceedings of the MCC workshop on Mobile Cloud
Computing,08 2012.
[16] A. Vörös et al., “MoDeS3: Model-Based Demonstrator for
Smart andSafe Cyber-Physical Systems,” in Lecture Notes in Computer
Science(including subseries Lecture Notes in Artificial
Intelligence and LectureNotes in Bioinformatics), vol. 10811 LNCS,
2018, pp. 460–467.
[17] D. Varró, O. Semeráth, G. Szárnyas, and Á. Horváth,
Towards theAutomated Generation of Consistent, Diverse, Scalable
and RealisticGraph Models. Springer, 2018, no. 10800.
[18] W. Kang, K. Kapitanova, and S. Son, “Rdds: A real-time data
distri-bution service for cyber-physical systems,” IEEE Trans. Ind.
Informat.,vol. 8, no. 2, pp. 393–405, 2012.
[19] G. Bergmann, Z. Ujhelyi, I. Ráth, and D. Varró, “A graph
query languagefor EMF models,” in Theory and Practice of Model
Transformations -4th International Conference, ICMT 2011, Zurich,
Switzerland, June 27-28, 2011. Proceedings, 2011, pp. 167–182.
[20] I. Dávid, I. Ráth, and D. Varró, “Foundations for
Streaming ModelTransformations by Complex Event Processing,”
Software and SystemModeling, vol. 17, no. 1, pp. 135–162, 2018.
[21] M. Abril et al., “An assessment of railway capacity,”
TransportationResearch Part E: Logistics and Transportation Review,
vol. 44, no. 5,pp. 774–806, 2008.
[22] D. Emery, “Headways on high speed lines,” in 9th World
Congress onRailway Research, 2011, pp. 22–26.
[23] T. Hartmann, F. Fouquet, M. Jimenez, R. Rouvoy, and Y. Le
Traon,“Analyzing complex data in motion at scale with temporal
graphs,”in The 29th International Conference on Software
Engineering &Knowledge Engineering (SEKE’17). KSI Research,
2017, p. 6.
[24] B. Izsó, G. Szárnyas, I. Ráth, and D. Varró,
“Incquery-d: Incrementalgraph search in the cloud,” in Proceedings
of the Workshop on Scalabilityin Model Driven Engineering, ser.
BigMDE ’13. New York, NY, USA:ACM, 2013, pp. 4:1–4:4.
[25] C. L. Forgy, “Rete: A fast algorithm for the many
pattern/many objectpattern match problem,” Artificial Intelligence,
vol. 19, no. 1, pp. 17–37,sep 1982.
[26] A. El-Hokayem and Y. Falcone, “Monitoring decentralized
specifi-cations,” in Proceedings of the 26th ACM SIGSOFT
InternationalSymposium on Software Testing and Analysis, ser. ISSTA
2017. NewYork, NY, USA: ACM, 2017, pp. 125–135.
[27] P. S. Duggirala, T. T. Johnson, A. Zimmerman, and S. Mitra,
“Staticand dynamic analysis of timed distributed traces,” in 2012
IEEE 33rdReal-Time Systems Symposium, Dec 2012, pp. 173–182.
[28] V. K. Garg, “Observation of global properties in
distributed systems.”in SEKE. Citeseer, 1996, pp. 418–425.
[29] X. Zheng, C. Julien, R. Podorozhny, F. Cassez, and T.
Rakotoarivelo.[30] J. Gubbi, R. Buyya, S. Marusic, and M.
Palaniswami, “Internet of things
(iot): A vision, architectural elements, and future directions,”
Futuregeneration computer systems, vol. 29, no. 7, pp. 1645–1660,
2013.
[31] M. Hassanalieragh, A. Page, T. Soyata, G. Sharma, M. Aktas,
G. Mateos,B. Kantarci, and S. Andreescu, “Health monitoring and
managementusing internet-of-things (iot) sensing with cloud-based
processing: Op-portunities and challenges,” in 2015 IEEE
International Conference onServices Computing, June 2015, pp.
285–292.
[32] S. Fang, L. Da Xu, Y. Zhu, J. Ahati, H. Pei, J. Yan, Z. Liu
et al., “Anintegrated system for regional environmental monitoring
and manage-ment based on internet of things.” IEEE Trans.
Industrial Informatics,vol. 10, no. 2, pp. 1596–1605, 2014.
688