Embed Size (px)
Citation preview

Evaluation of a Procedure to Correct Spatial Averaging in TurbulenceStatistics from a Doppler Lidar by Comparing Time Series
with an Ultrasonic Anemometer
PETER BRUGGER,a KATJA TRÄUMNER, AND CHRISTINA JUNG
Karlsruhe Institute of Technology, Karlsruhe, Germany
(Manuscript received 3 July 2015, in final form 15 July 2016)
ABSTRACT
Doppler lidars are frequently used for wind measurements in the atmospheric boundary layer, but their
data are subject to spatial averaging due to the pulse length of the laser and sampling frequency of the return
signal. This spatial averaging also affects estimates of turbulence statistics like the velocity variance and outer
scale of turbulence fromDoppler lidar data. In this study a procedure from Frehlich and Cornman based on a
von Kármán turbulence model was systematically applied to correct these effects of spatial averaging on
turbulence statistics. The model was able to reduce the occurring bias of the velocity variance and outer scale
of turbulence in a comparison of time series from a Doppler lidar and an ultrasonic anemometer. The
measurements show that the bias of the velocity variance was reduced by 29% and that of the outer scale of
turbulence by 43%. But both turbulence parameters had a remaining systematic error that could not be
explained by the von Kármán model of the structure function.
1. Introduction
The atmospheric boundary layer is a vital element
within the interaction of the free atmosphere and the
earth’s surface (Stull 1988). Turbulence is a major
characteristic of the atmospheric boundary layer, and it
dominates the transport processes between the surface
and the free atmosphere (Kaimal and Finnigan 1994).
Descriptions of the turbulent flow on the basis of tur-
bulence parameters, such as velocity variance, dissipa-
tion rate of the turbulent kinetic energy, and length
scales, are widely applied in meteorology (Stull 1988).
Accurate measurements of turbulence parameters are
therefore desirable (O’Connor et al. 2010).
Pulsed Doppler lidars with heterodyne detection are
used for wind measurements in the atmospheric
boundary layer (Werner 2005). They emit a laser pulse
that is scattered and Doppler shifted by aerosols in the
atmosphere. The backscattered radiation is mixedwith a
local oscillator and the beat note signal is detected
(Grund et al. 2001). The frequency shift information of
each pulse is extracted and accumulated over multiple
pulses, and the mean Doppler shift is estimated to im-
prove precision (Rye and Hardesty 1993). The Doppler
shift yields the line-of-sight (radial) component of the
wind velocity. For a fixed-beam orientation, the spatial
resolution and measurement frequency of Doppler li-
dars allow for turbulence measurements of the ra-
dial velocity within the inertial subrange (Mann et al.
2008) and it is possible to derive turbulence parameters
from these measurements (Frehlich and Cornman 2002;
Lothon et al. 2006). Their limitation to measure only the
radial velocity makes the use of scanning techniques for
three-dimensional turbulence information for a single-
Doppler lidar necessary. Turbulence measurements
with these scanning techniques have limited precision
(Sathe et al. 2011, 2015). However, even with a fixed-
beam orientation the measurements of a Doppler lidar
entail significant spatial averaging, which affects the
estimation of turbulence parameters (Frehlich 1997).
The spatial averaging is caused by two processes.
First, the emitted laser pulse has a certain length and at a
given time the detector receives backscattered radiation
a Current affiliation: Institute of Meteorology and Climate
Research—Atmospheric Environmental Research (IMK-IFU),
KIT, Garmisch-Partenkirchen, Germany.
Corresponding author address: Peter Brugger, Institute of Me-
teorology and Climate Research—Troposphere Research (IMK-
TRO), KIT, Postfach 3640, 76021 Karlsruhe, Germany.
E-mail: [email protected]
OCTOBER 2016 BRUGGER ET AL . 2135
DOI: 10.1175/JTECH-D-15-0136.1
� 2016 American Meteorological SocietyUnauthenticated | Downloaded 10/12/21 06:09 AM UTC

from all over the pulse volume (Frehlich et al. 1998).
Second, the Doppler shift of each pulse is extracted
from a backscatter time series that originates from an
elongated region due to the propagation of the laser
pulse through the atmosphere during the sampling of the
time series (Frehlich et al. 1998). The length of this re-
gion is the range gate length, given by
Dp5SPGc
2fS
, (1)
where c is the speed of light, SPG is the number of
samples per gate, and fS is the sampling frequency of the
backscattered radiation (Frehlich et al. 1998). Therefore,
measurements of the radial velocity from a Doppler lidar
are not point measurements, but a spatial average over
the pulse length and range gate length.
Spatial averaging has a turbulence-reducing effect on
velocity statistics from Doppler lidar measurements
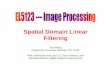
(Frehlich 1997). This effect can be illustrated with an
example of white circles on black background (Fig. 1).
The high-resolution picture provides sharp differences
between black and white, and the size of the circles is
accurately visible. In the spatially averaged picture, the
small circles have become indistinguishable from the
background and large circles are blurred. This has re-
duced the black-and-white variance of the averaged
picture. Also, the average circle size is increased, be-
cause the smoothing of large circles spreads white into
areas that were black before and the small circles have
vanished. The spatial averaging of radial velocity mea-
surements from Doppler lidars shows a similar effect on
turbulence statistics. The solid line in Fig. 1 can be re-
garded as consecutive overlapping range gates along a
Doppler lidar’s laser beam or a time series from one
range gate assuming Taylor’s hypothesis of frozen tur-
bulence (Taylor 1938). The radial velocity variance gets
reduced as areas with high and low velocities are aver-
aged and the length scales of eddies (velocity patches
differing from the mean wind) are increased.
For this reason, a correction is needed for turbulence
parameters from Doppler lidar measurements. A cor-
rection is also necessary to make turbulence parameters
from Doppler lidars comparable to in situ point mea-
surements, as recent meteorological field campaigns
feature combinations of towers, eddy covariance sta-
tions, and Doppler lidars (Behrendt et al. 2011; Eder
et al. 2015; Klein et al. 2015). Frehlich et al. (1998) and
Frehlich and Cornman (2002) developed a procedure to
correct the effect of spatial averaging on estimates of
turbulence parameters from Doppler lidar measure-
ments using a von Kármán turbulence model.
The method from Frehlich and Cornman (2002) was
applied by Davies et al. (2004), Frehlich et al. (2006),
and Lothon et al. (2006) to calculate turbulent statistics
frommeteorological field experiments. A comparison to
spatially separated in situmeasurements from a tethered
lifting system was done by Frehlich et al. (2006) for
mean profiles of the boundary layer. Here, an evaluation
of the correction procedure from Frehlich and Cornman
(2002) is presented with an ultrasonic anemometer
measuring at the center of a Doppler lidar’s range gate,
which was not done in other studies. Turbulence pa-
rameters obtained by fitting a von Kármán model to
measurements of the structure function were compared
for both instruments. In the case of the Doppler lidar,
the von Kármán model has the modifications from
Frehlich and Cornman (2002) to account for spatial
FIG. 1. Effect of spatial averaging on white circles on black background. (left) The true field
and (right) the spatially averaged field. The averaging area was 4% of the domain size. In this
example the black–white variance along the solid line was reduced by 20% and the integral
length scale was increased by 18%.
2136 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 33
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

averaging. The paper is organized as follows: Section 2
describes the measurements on which the comparison is
based. Section 3 details the estimation of turbulence pa-
rameters. Section 4 presents the results of the evaluation.
2. Instruments and measurements
Doppler lidar measurements were compared with
ultrasonic anemometer measurements to evaluate the
procedure from Frehlich and Cornman (2002). The
measurements took place at the Karlsruhe Institute of
Technology (KIT) Campus North (CN) research facility
in Karlsruhe, Germany, from 1130 UTC 20 February
2013 until 0745 UTC 27 February 2013. The ultrasonic
anemometer wasmounted at a height of 100m above the
ground on a 200-m tower (49.09148N, 8.42488E). Thesurrounding area is flat with surface height variations of
less than 20m and is forested to the north, west, and
south; the height of the forest is approximately 35m.
East and northeast of the tower is the industrial area of
the research facility. The Doppler lidar was deployed
1.45 km northeast of the tower at 49.10388N, 8.43048E,and the laser was pointed toward the ultrasonic ane-
mometer with an elevation of el5 4:168 and an azimuth
of az5 196:68. The lidar beamwas pointed slightly to the
right of the ultrasonic anemometer using hard target
detection.
The Doppler lidar used was a WindTracer system
from Lockheed Martin Coherent Technology (year of
construction: 2004). It has a pulsed Tm:LuAG laser
with a wavelength of 2023nm, a spatial full width at half
maximumpulse length ofDr5 55:5m and a pulse energy
of 2.0mJ. The return signal was sampled at a frequency
of fS 5 250MHz, and the number of data samples used
for an estimate of one radial velocity was changed dur-
ing the measurements. The corresponding range gate
lengths ranged from Dp5 10:2m to Dp5 153:6m (see
Table 1). The pulse repetition frequency was 500Hz and
50 pulses were accumulated for estimates of the radial
velocity, resulting in an effective measurement fre-
quency of 10Hz.
The ultrasonic anemometer was an R2 from Gill In-
struments (serial number 0204R2). It measured the
three-dimensional wind vector with a frequency of 20Hz
and has an accuracy of 3% (Gill Instruments Ltd. 1995).
The weather conditions during the measurements were
within the recommended operating range. The ultra-
sonic anemometer is part of long-term turbulence
measurements at the tower and was mounted in 1995
(details described in Kalthoff and Vogel 1992).
3. Estimating velocity variances and outer scales
The velocity variance (s2y) is a measure of turbulence
intensity or turbulence kinetic energy (Stull 1988). The
outer scale of turbulence (L0) is the length scale from
which the turbulence cascade within the inertial subrange
draws its energy from the mean current (Kristensen and
Lenschow 1987). One way to estimate s2y and L0 is based
on the velocity structure function
Dy(s
0, s)5 h[y0(s
0)2 y0(s
01 s)]2i , (2)
where angle brackets indicate an ensemble average, y0 isthe turbulent velocity fluctuation of an arbitrary velocity
component y, s0 is a point in space, and s is a spatial
separation (Frehlich et al. 1998).
The longitudinal and transverse velocity structure
function can be described with a model introduced by
von Kármán (1948) for homogeneous and isotropic
turbulence, which includes only s2y andL0 as parameters
(Frehlich et al. 1998). The structure function is called
longitudinal if the direction of the s and y are parallel,
and transverse if they are perpendicular. The following
equations describe either the longitudinal or transverse
components of the structure function and a scalar sep-
aration s is used for them instead of s. Also, arguments
of a function are separated from model parameters by a
semicolon. The von Kármán model is then given by
D(s;s2y ,L0
)5 2s2yL
�s
L0
�(3)
TABLE 1. Doppler lidar settings during the measurements and mean wind conditions: Number of samples per gate, length of the range
gate [calculated from Eq. (1)], period of measurement, mean SNR of the Doppler lidar with standard deviation, mean horizontal wind
speed with standard deviation, and mean wind direction from the ultrasonic anemometer for each period.
SPG Dp (m) Start time End time SNR (dB) yH (ms21) Dir (8)
17 10,2 1252 UTC 21 Feb 2013 1428 UTC 22 Feb 2013 5.93 6 2.55 6.21 6 1.79 302.26
32 19,2 1545 UTC 26 Feb 2013 0745 UTC 27 Feb 2013 11.23 6 4.40 4.36 6 1.58 322.66
50 30,0 1428 UTC 22 Feb 2013 1457 UTC 23 Feb 2013 13.26 6 2.88 4.91 6 1.77 330.13
100 60,0 1127 UTC 20 Feb 2013 1250 UTC 21 Feb 2013 7.18 6 2.58 5.63 6 1.71 303.68
150 90,0 1458 UTC 23 Feb 2013 1259 UTC 24 Feb 2013 15.80 6 2.28 2.69 6 1.52 10.30
200 120,0 1259 UTC 24 Feb 2013 2011 UTC 25 Feb 2013 16.49 6 3.48 2.88 6 1.34 130.60
256 153,6 2011 UTC 25 Feb 2013 1544 UTC 26 Feb 2013 16.67 6 1.99 3.55 6 1.24 304.18
OCTOBER 2016 BRUGGER ET AL . 2137
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

with
L(x)5 1222/3
G(1/3)(x)1/3K
1/3(x) (4)
for the longitudinal structure function and
L(x)5 1222/3
G(1/3)
�s
L0
�1/3
��K
1/3
�s
L0
�2
s
2L0
K2/3
�s
L0
��
(5)
for the transverse structure function, where the gamma
function G is given by
G(x)5
ð‘0
t x21e2t dt for Re(x). 0 (6)
and the Bessel function Kp of the order p is given by
Kp(x)5
p[I2p(x)2 I
p(x)]
2 sin(pp)for x 2 (0,‘) (7)
with
Ip(x)5 �
‘
k50
1
k! � G(p1 k1 1)
�x2
�2k1p
(8)
(Bronstein et al. 2007). The von Kármán model is ac-
cording to Hinze (1975) an empirical interpolation for-
mula covering the range from the largest eddies to the
inertial subrange. It is independent of stratification or
the driving mechanism of turbulence. It shows good
agreement with observations from grid turbulence in
wind tunnels (von Kármán 1948) and has been used for
atmospheric turbulence in the boundary layer under a
wide range of conditions (Kristensen and Lenschow
1987; Shiau 2000; Frehlich et al. 2006). Values for s2y and
L0 can be estimated by fitting the von Kármán model to
the structure function of the measurements.
However, Doppler lidar measurements are not point
measurements, but an average over a slim cylinder ori-
ented along the beam direction (Frehlich et al. 1998).
The effect of spatial averaging can be seen as a lower
spectral kinetic energy density within the inertial sub-
range in the spectra of the turbulent kinetic energy
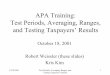
density (Fig. 2). It was shown by Stawiarski et al. (2013)
that spatial averaging due to pulse length and range gate
length can lead to errors on the order of 0.3–0.4m s–1 in
the standard deviation of the radial velocity for dual-
Doppler lidars. Furthermore, this will lead to an un-
derestimation of s2y and an overestimation of L0
(Frehlich et al. 1998). Therefore, Frehlich et al. (1998)
included the effects of spatial averaging in the von
Kármán model to correct estimations of s2y and L0.
a. Spatially averaged model of the velocity structurefunction
The effect of averaging due to the laser pulse and the
range gate can be predicted, because its effect on the
structure function is mathematically well understood.
Frehlich et al. (1998) averaged the von Kármán model of
the structure function [Eq. (3)] to include the spatial aver-
aging of the Doppler lidar, which is described by a convo-
lution of the true wind field with a weighting function
defined by the pulse length and the range gate length. As-
suming a linear average over the range gate length Dp and
aGaussianweighted average for the laser pulse with the full
width at halfmaximumDr, the averagedvonKármánmodel
of the structure function is given by (Frehlich et al. 1998)
Dwgt
(s;sy,L
0,Dp,Dr)5 2s2
yG
�s
Dp,
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi2 ln(2)
p Dp
Dr,Dp
L0
�
(9)
with
G(y,m, x)5
ð‘2‘
F(x,m)[L(xjy2 xj)2L(xjxj)] dx, (10)
where L is given by Eq. (4) for a longitudinal structure
function or by Eq. (5) for a transverse structure function,
and
FIG. 2. Spectra of the turbulent kinetic energy density Sry of the
radial velocity against the frequency y from a Doppler lidar and an
ultrasonic anemometer. The spectra were smoothed with an av-
erage over 30 logarithmically spaced frequency intervals. The
lower kinetic energy of the Doppler lidar around 0.1Hz shows
a loss of turbulence compared to the ultrasonic anemometer due to
spatial averaging. The leveling of the Doppler lidar spectra at
higher frequencies is caused by noise. The spectra are taken from
the interval between 1527 and 1557 UTCwith 100 samples per gate
(see section 2 for details). The dashed line represents the25/3 law
from Kolmogorov (1941).
2138 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 33
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

F(x,m)51
2ffiffiffiffip
pmfexp[2m2(x1 1)2]1 exp[2m2(x2 1)2]g1 x
2ferf[m(x1 1)]1 erf[m(x2 1)]2 2erf(mx)g
21ffiffiffiffip
pmexp(2m2x2)1
erf[m(x1 1)]
22
erf[m(x2 1)]
2. (11)
The parametersDr andDp are dependent on theDoppler
lidar specifications. Fitting the averaged von Kármánmodel to Doppler lidar measurements of the structure
function produces estimates fors2y andL0 with correction
of spatial averaging.
b. Calculating structure functions from Doppler lidarmeasurements for comparison with in situmeasurements
The models from Eqs. (3) and (9) are based on a
longitudinal or transverse structure function. For the
ultrasonic anemometer, the longitudinal structure func-
tion can be calculated for the velocity component in the
mean wind direction using Taylor’s frozen turbulence
hypothesis (Taylor 1938). For a Doppler lidar with a
fixed beam, a longitudinal structure function can be
applied for the radial velocity along the lidar beam us-
ing range gates at different distances from the lidar for
sets of separations (Frehlich and Cornman 2002). The
structure function of the Doppler lidar spans a large
vertical distance due to the elevation angle of the laser
beam. A comparison of these two structure functions is
therefore not feasible, because the boundary layer tur-
bulence cannot be assumed to be homogeneous in the
vertical direction.
To achieve comparability, only the lidar range gate
closest to the ultrasonic anemometer was considered
and the structure function of the radial velocity was
computed for both instruments from the respective time
series using Taylor’s hypothesis. For the ultrasonic an-
emometer, the radial velocity was obtained by projec-
ting the wind vector onto the radial coordinate using
yua5 u
1cos(el) sin(az)1 u
2cos(el) cos(az)2 u
3sin(el) .
(12)
The center of the lidar range gate closest to the ultra-
sonic anemometer was less than 10m away and 5.9m
above the ultrasonic anemometer. The same velocity
component at the same height was compared, and dif-
ferences should therefore occur only from spatial aver-
aging and measurement errors with this approach. The
drawback is that the structure function is longitudinal
only if the mean wind is parallel to the laser beam. Er-
rors of s2y and L0 due to the nonlongitudinal structure
function are assumed to affect only absolute values, but
not the relative error between the ultrasonic anemometer
and the Doppler lidar. Experimental reasons for this as-
sumption are given in section 4.
The time series of theDoppler lidar was filtered with a
signal-to-noise ratio (SNR) threshold of 0 dB; that is,
data with an SNRbelow this threshold were discarded to
remove low-quality data points of the radial velocity.
The time series of the radial velocity from the ultrasonic
anemometer and the Doppler lidar were split into
30-min intervals. If more than 25% of the Doppler lidar
data within an interval was filtered due to too low SNR,
then the interval was discarded. For the remaining
intervals, a linear trend was removed from each interval
to obtain y0.The spatial separations of the structure function were
calculated for each interval in the mean wind direction
using Taylor’s hypothesis with Ds5 yDt, where y is the
horizontal mean wind speed from the ultrasonic ane-
mometer and Dt is the time between two samples of the
radial velocity. The structure function is calculated using
(Frehlich 1997)
D̂(kDs)5 2[B̂(0)2 B̂(kyDt)] , (13)
where the autocovariance function B̂ is given by
B̂(kyDt)51
NT2 k
�NT2k
l51
y0(lDt)y0[(l1 k)Dt] (14)
with NT as the number of data points in the interval. In
the case of the Doppler lidar, the autocovariance has a
bias s2e due to variance from uncorrelated noise
(Frehlich and Cornman 2002). This error was estimated
with the method described by Frehlich and Cornman
(2002) from the autocovariance with
s2e 5 B̂(0)2 [2B̂(Ds)2 B̂(2Ds)] (15)
and subtracted from B̂(0). In summary, the measured
structure function D̂ of the radial velocity with separations
in the mean wind direction for both instruments is fitted
with the longitudinal model given by Eq. (3) for the ul-
trasonic anemometer and by Eq. (9) for the Doppler lidar.
c. Model fit
The model used for the structure function of the
Doppler lidar is Eq. (9), and the model used for the ul-
trasonic anemometer is Eq. (3). They were fitted to the
OCTOBER 2016 BRUGGER ET AL . 2139
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

measured structure function of the radial velocity for
each 30-min interval [Eq. (13)] from the measurements
described in section 2. The range gate settings were
considered accordingly to Table 1. A nonlinear least
squares fit with a Levenberg–Marquardt algorithm was
used to fit themodel (Levenberg 1944;Marquardt 1963).
Initial values were set to s2y 5 1m2 s22 and L0 5 100m.
Separations between smin 5 10m and smax 5 1500m
were used to fit the model. This separation domain is
large enough to allow good estimates for s2y andL0 while
providing enough data points for the largest separations
of the structure function.
It is possible that the fit of the model does not con-
verge. A practical solution for this problem is limiting
the parameter space of the outer scale to L0 5 [0, 2000]
and s2y 5 [0, 10] with a sufficiently high number of iter-
ations for the fit and dismissing values close to the pa-
rameter space borders.
4. Comparison of s2y andL0 fromDoppler lidar and
ultrasonic anemometer
First, the 100-sample-per-gate subset of the data was
examined, because it is the recommended setting for the
Doppler lidar. The weather during this observation pe-
riod was influenced by a low pressure trough over
western Europe. The northeasterly flow on synoptic
scales was locally diverted to a northwesterly flow by
topographical effects of the Rhine Valley. The mean
wind direction ranged from 41.68 to 91.48 relative to the
lidar beam. During the measurements no precipitation
was detected and the sky was overcast. Tempera-
tures were between 3.88 and 21.28C. The stratification
was statically stable during nighttime and unstable
around noon.
The dataset of the radial velocity consists of 51 in-
tervals of 30min each for the ultrasonic anemometer
and the Doppler lidar. Three intervals were discarded
due to too low SNR. For the remaining intervals, the
structure function was computed and the values of s2y
and L0 were derived as described in section 3. A com-
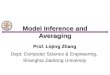
parison between ultrasonic anemometer and corrected
Doppler lidar estimates for s2y is shown in Fig. 3 and for
L0 in Fig. 4.
Both parameters show outliers with considerably
larger 95% confidence bounds, shown as error bars in
the figures. Those data points are encircled in the figures
and were excluded from the linear regression and the
correlation coefficient. These data points show no sys-
tematic relation to the environmental conditions and
occur for different time intervals for s2y and L0.
Uncorrected values for s2y and L0 were obtained by
fitting the nonaveraged von Kármán model [Eq. (3)] to
the structure function of the Doppler lidar. The cor-
rection did reduce the systematic underestimation of the
variance in the slope of a linear regression from 0.52 to
0.64 by 25%. In the case of the outer scale, the over-
estimation was reduced from 1.93 to 1.28 by 71%. The
correlation between theDoppler lidar and the ultrasonic
anemometer is higher for s2y than forL0. The bias due to
spatial averaging between the Doppler lidar and the
FIG. 3. Radial velocity variances s2y from the Doppler lidar de-
rived with Eq. (9) vs s2y from the ultrasonic anemometer derived
with Eq. (3). The solid line is the identity, and the dashed line is
a linear regression of the plotted data excluding encircled data
points. Values of r and a of the linear regression with 95% confi-
dence bounds are shown in the text box. The dashed–dotted line is
the linear regression of the uncorrected Doppler lidar velocity
variances using model Eq. (3) for the Doppler lidar as well.
FIG. 4. Outer scale of turbulence L0 from the Doppler lidar
derived with Eq. (9) vsL0 from the ultrasonic anemometer derived
with Eq. (3). The plotted lines and numbers in the box are the same
quantities as in Fig. 3.
2140 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 33
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

ultrasonic anemometer depends on the intensity of the
turbulence and increases for stronger turbulence. This is
explained by the increase of small-scale patterns in the
wind field for more turbulent conditions. In contrast, the
percentage of correction is independent of the un-
derlying conditions. This is consistent with the expec-
tation, as the theory of the correction procedure makes
no distinction between shear and convective-driven
turbulence, and environmental parameters like mean
wind and stratification are not parameters of the model.
For s2y and L0, the correction procedure did not
eliminate the systematic error completely. The reasons
might be (i) different measurement frequencies,
(ii) beamwidth, (iii) influences of the tower, (iv) non-
longitudinal structure function, and (v) noncorrect Dpand Dr. Those effects will be regarded in detail. The
effect of different measurement frequencies of lidar and
ultrasonic was checked by averaging the ultrasonic an-
emometer to the sampling frequency of the Doppler li-
dar and was found to be negligible. Averaging due to the
beamwidth is considered to be negligible according to
Frehlich et al. (1998). Effects due to the influence of the
tower itself on the wind field were checked by compar-
ing the results for different wind directions, where the
ultrasonic anemometer and Doppler lidar range gate
were upwind or downwind of the tower, but a systematic
error remained for both cases. To investigate a con-
nection of the remaining systematic error to the non-
longitudinal structure function, the same procedures as
for Figs. 3 and 4 were carried out using only intervals
where the mean wind direction was in the direction of
the lidar beam direction or perpendicular to it. The
longitudinal model of the structure function was fitted
for intervals, where the wind direction was in the beam
direction and the transverse model was fitted for in-
tervals with a perpendicular wind direction. The whole
dataset from section 2 was used to get a sufficiently large
number of intervals for a correlation and linear re-
gression. In addition a 68 deviation of the mean wind
direction was allowed from the longitudinal or trans-
verse direction. The results are shown in Figs. 5 and 6
and have similar values for the correlation coefficients
and linear regressions as the ones for all mean wind di-
rections with a longitudinal model (Figs. 3 and 4). There-
fore, it was concluded that the remaining systematic error
was not caused by the nonlongitudinal structure function.
The source of the remaining systematic error is unknown
to us.
It was shown that the correction procedure only re-
duces the bias between the Doppler lidar and the ul-
trasonic anemometer, and the remaining bias could not
be explained with the experimental setup or further
averaging processes. For this reason it was investigated
next whether the remaining systematic error can be re-
duced by increasing Dr or Dp, both of which are pa-
rameters of themodel. The idea is that the parameters in
Eq. (9) had to be replaced by an effective pulse length
and range gate length. Therefore, the steps to calculate
the values of Figs. 3 and 4 were repeated for values
ranging from 10% to 200%of the pulse length and range
gate length. The same 48 intervals as for the comparison
from Fig. 3 were used for s2y for every combination of Dr
FIG. 5. Radial velocity variances s2y from the Doppler lidar de-
rived with Eq. (9) vs s2y from the ultrasonic anemometer derived
with Eq. (3) using only intervals where themeanwind directionwas
in beam direction with the longitudinal model or perpendicular to
it with the transverse model of the structure function. The plotted
lines and numbers in the box are the same quantities as in Fig. 3.
FIG. 6. Outer scale of turbulence L0 from the Doppler lidar
derived with Eq. (9) vsL0 from the ultrasonic anemometer derived
with Eq. (3) using only intervals where themeanwind directionwas
in beam direction with the longitudinal model or perpendicular to
it with the transverse model of the structure function. The plotted
lines and numbers in the box are the same quantities as in Fig. 3.
OCTOBER 2016 BRUGGER ET AL . 2141
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

and Dp, and for L0 the intervals from Fig. 4. The cor-
relation coefficient r and the slope a of a linear re-
gression were computed for each member of this
ensemble and are shown in Figs. 7–10 as a function of
pulse length and range gate length. The results show that
increasing the pulse length and range gate length does
improve the slope of the linear regression toward one.
However, this is accompanied by an increased scatter of
the velocity variance between the ultrasonic anemom-
eter and the Doppler lidar as indicated by the low cor-
relation coefficients for large range gate and pulse
lengths. The high values for the correlation coefficient of
the outer scale at large pulse lengths and range gate
lengths are misleading due to the lower border of the
parameter space for the outer scale at L0 5 0m, which
masks an increasing number of intervals that do not
converge for L0. It was concluded that increasing the
pulse length and range gate length is not sufficient to
correct the remaining systematic error; therefore, the
introduction of an effective Dp and Dr is not reasonable.For future investigations of this remaining systematic
error, a control experiment by deploying multiple ul-
trasonic anemometers along a Doppler lidar range gate
seems desirable. Averaging the ultrasonic anemometers
should lead to the Doppler lidar results, if spatial aver-
aging is the main problem behind the bias. An experi-
mental setup that allows for reanalyzing of the Doppler
lidar signal with different range gate lengths to in-
vestigate the dependency of the bias to spatial averaging
is also an interesting option for a future experiment.
Future research in general on a reduction of the bias in
turbulence parameters between those received from a
Doppler lidar and those from an ultrasonic anemometer
has to focus on the correction procedure itself, either by
using better suited turbulencemodels or by improving the
description of the measurement properties of a Doppler
lidar. Technical improvements of the instrument to re-
duce spatial averaging are also possible: The range gate
length can be reduced by a higher sampling frequency of
the return signal or by shorter pulse lengths. But at the
same time, a shorter pulse length of the laser will result
FIG. 8. Correlation coefficient of s2v from the ultrasonic ane-
mometer and the Doppler lidar as a function of the pulse length
and range gate length. Each square represents a correlation co-
efficient as in the text box of Fig. 3, but for values of Dp and Draccording to the figure axes. The cross represents the settings of our
Doppler lidar.
FIG. 7. Slope of a linear regression of s2y from the ultrasonic
anemometer and theDoppler lidar as a function of the pulse length
and range gate length. Each square represents a linear regression
like the dashed line in Fig. 3, but for values of Dp and Dr accordingto the figure axes. The cross represents the settings of our Doppler
lidar.
FIG. 9. Slope of a linear regression of L0 from the ultrasonic
anemometer and theDoppler lidar as a function of the pulse length
and range gate length. Each square represents a linear regression
like the dashed line in Fig. 4, but for values of Dp and Dr accordingto the figure axes. The cross represents the settings of our Doppler
lidar.
2142 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 33
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

in a broader frequency bandwidth of the laser, which will
lead to errors in measurements of the radial velocity.
Before closing this discussion, it should be noted that
the separation domain used to fit the model, especially
the maximum separation, has an influence on the results
previously shown. In theory, the separations of the
structure function from Eq. (13) range from zero to in-
finity. In practice, the time series is limited and a finite
domain of separation is used to fit the model. Davies
et al. (2004) used separations between smin 5 300m and
smax 5 1500m, and Frehlich and Cornman (2002) and
Frehlich et al. (2006) used smin 5 10m and smax 5 500m
as a separation domain for the fit of the von Kármánmodel. A smaller maximum separation leads to a sys-
tematically smaller s2y , because it is mostly determined
at large separations as L in Eq. (9) converges to one for
large separations. A variation of the smallest separation
between 0 and 300m has nearly no influence on the
variance. Increasing the smallest separation increases
large values of L0, while small values of L0 (L0 , 300m)
are not strongly affected. Different maximum separa-
tions showed no systematic influence on L0.
5. Summary
An experimental verification of the procedure from
Frehlich andCornman (2002) to correct the effects of spatial
averaging in estimations of the radial velocity variance s2y
and outer scale of turbulence L0 from Doppler lidar mea-
surementswas presented.Acomparisonof time series of the
radial velocity from an ultrasonic anemometer and a nearby
range gate of a Doppler lidar was used for the validation.
Derivations of s2y and L0 from Doppler lidar data
using a von Kármán model with the corrections given by
Frehlich et al. (1998) lead to better agreement with the
ultrasonic anemometer than without correction of the
spatial averaging. The systematic error in the slope of a
linear regression was reduced by 71% for L0 and 25%
for s2y . However, the results have a remaining systematic
error of 28% for L0 and 36% for s2y , which still leads to
an underestimation of the radial velocity variance and
an overestimation of the outer scale of turbulence
(Figs. 3 and 4). Different sources for the remaining error
were checked, but they could not provide an explana-
tion. Further research is therefore needed to determine
the cause of the remaining error and to develop a tur-
bulence model that enables correct estimation of tur-
bulence parameters from Doppler lidar measurements.
Acknowledgments. This scientific work was done
within the Young Investigator Group ‘‘Exploring co-
herent structures using Dual Doppler lidar systems’’ of
the Karlsruhe Institute of Technology (KIT), Karslruhe,
Germany.We are grateful to the Institute ofMeteorology
and Climate Research (IMK) of the Karlsruhe Institute
of Technology (KIT) for the data from the measurement
tower at theCampusNorth (CN) research facility.Weare
grateful to Dr. Andreas Wieser for his help with setting
up the Doppler lidar and executing the measurements.
REFERENCES
Behrendt, A., and Coauthors, 2011: Observation of convection
initiation processes with a suite of state-of-the-art research
instruments during COPS IOP 8b.Quart. J. Roy. Meteor. Soc.,
137, 81–100, doi:10.1002/qj.758.
Bronstein, I. N., K. A. Semendyayev, G. Musiol, and H. Muehlig,
2007: Handbook of Mathematics. Vol. 3. Springer, 1164 pp.
Davies, F., C. Collier, G. Pearson, andK.Bozier, 2004:Doppler lidar
measurements of turbulent structure function over an urban
area. J. Atmos. Oceanic Technol., 21, 753–761, doi:10.1175/
1520-0426(2004)021,0753:DLMOTS.2.0.CO;2.
Eder, F., M. Schmidt, T. Damian, K. Träumner, and M. Mauder,
2015: Mesoscale eddies affect near-surface turbulent exchange:
Evidence from lidar and tower measurements. J. Appl. Meteor.
Climatol., 54, 189–206, doi:10.1175/JAMC-D-14-0140.1.
Frehlich, R., 1997: Effects of wind turbulence on coherent Doppler
lidar performance. J. Atmos. Oceanic Technol., 14, 54–75,
doi:10.1175/1520-0426(1997)014,0054:EOWTOC.2.0.CO;2.
——, and L. Cornman, 2002: Estimating spatial velocity statistics
with coherent Doppler lidar. J. Atmos. Oceanic Technol., 19,
355–366, doi:10.1175/1520-0426-19.3.355.
——, S.M.Hannon, and S.W.Henderson, 1998: CoherentDoppler
lidar measurements of wind field statistics. Bound.-Layer
Meteor., 86, 233–256, doi:10.1023/A:1000676021745.
——, Y. Meillier, M. L. Jensen, B. Balsley, and R. Sharman, 2006:
Measurements of boundary layer profiles in an urban envi-
ronment. J. Appl. Meteor. Climatol., 45, 821–837, doi:10.1175/
JAM2368.1.
FIG. 10. Correlation coefficient of L0 from the ultrasonic ane-
mometer and the Doppler lidar as a function of the pulse length
and range gate length. Each square represents a correlation co-
efficient as in the text box of Fig. 4, but for values of Dp and Draccording to the figure axes. The cross represents the settings of our
Doppler lidar.
OCTOBER 2016 BRUGGER ET AL . 2143
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC

Gill Instruments Ltd., 1995: Solent Research ultrasonic anemom-
eter, product specification. 4th ed., 49 pp. [Available fromGill
Research and Development Ltd., Saltmarsh Park, 67 Gosport
Street, Lymington, Hampshire SO41 9EG, United Kingdom.]
Grund,C. J., R.M.Banta, J. L.George, J.N.Howell,M. J. Post,R.A.
Richter, and A. M. Weickmann, 2001: High-resolution Doppler
lidar for boundary layer and cloud research. J. Atmos. Oceanic
Technol., 18, 376–393, doi:10.1175/1520-0426(2001)018,0376:
HRDLFB.2.0.CO;2.
Hinze, J. O., 1975: Turbulence. 2nd ed. McGraw-Hill, 790 pp.
Kaimal, J. C., and J. J. Finnigan, 1994: Atmospheric Boundary
Layer Flows: Their Structure and Measurement. Oxford Uni-
versity Press, 89 pp.
Kalthoff, N., and B. Vogel, 1992: Counter-current and channelling
effect under stable stratification in the area of Karlsruhe.
Theor. Appl. Climatol., 45, 113–126, doi:10.1007/BF00866400.
Klein, P., andCoauthors, 2015: LABLE:Amulti-institutional, student-
led, atmospheric boundary-layer experiment.Bull. Amer.Meteor.
Soc., 96, 1743–1764, doi:10.1175/BAMS-D-13-00267.1.
Kolmogorov, A. N., 1941: The local structure of turbulence in in-
compressible viscous fluid for very large Reynolds numbers.
Dokl. Akad. Nauk SSSR, 30, 299–303.
Kristensen, L., and D. H. Lenschow, 1987: An airborne laser air
motion sensing system. Part II: Design criteria and measure-
ment possibilities. J. Atmos. Oceanic Technol., 4, 128–138,
doi:10.1175/1520-0426(1987)004,0128:AALAMS.2.0.CO;2.
Levenberg, K., 1944: A method for the solution of certain non-
linear problems in least squares. Quart. Appl. Math., 2,
164–168.
Lothon, M., D. H. Lenschow, and S. D. Mayor, 2006: Coherence
and scale of vertical velocity in the convective boundary layer
from a Doppler lidar. Bound.-Layer Meteor., 121, 521–536,
doi:10.1007/s10546-006-9077-1.
Mann, J., and Coauthors, 2008: Comparison of 3D turbulence
measurements using three staring wind lidars and a sonic an-
emometer. IOP Conf. Ser.: Earth Environ. Sci., 1, 012012,
doi:10.1088/1755-1315/1/1/012012.
Marquardt, D. W., 1963: An algorithm for least-squares estimation
of nonlinear parameters. SIAM J. Appl. Math., 11, 431–441,
doi:10.1137/0111030.
O’Connor, E. J., A. J. Illingworth, I. M. Brooks, C. D. Westbrook,
R. J. Hogan, F. Davies, and B. J. Brooks, 2010: A method for
estimating the turbulent kinetic energy dissipation rate from a
vertically pointing Doppler lidar, and independent evaluation
from balloon-borne in situ measurements. J. Atmos. Oceanic
Technol., 27, 1652–1664, doi:10.1175/2010JTECHA1455.1.
Rye, B. J., and R. M. Hardesty, 1993: Discrete spectral peak esti-
mation in incoherent backscatter heterodyne lidar. I. Spectral
accumulation and the Cramer-Rao lower bound. IEEE Trans.
Geosci. Remote Sens., 31, 16–27, doi:10.1109/36.210440.
Sathe, A., J. Mann, J. Gottschall, and M. S. Courtney, 2011: Can
wind lidars measure turbulence? J. Atmos. Oceanic Technol.,
28, 853–868, doi:10.1175/JTECH-D-10-05004.1.
——, ——, N. Vasiljevic, and G. Lea, 2015: A six-beam method to
measure turbulence statistics using ground-based wind lidars.
Atmos. Meas. Tech., 8, 729–740, doi:10.5194/amt-8-729-2015.
Shiau, B.-S., 2000: Velocity spectra and turbulence statistics at the
northeastern coast of Taiwan under high-wind conditions.
J. Wind Eng. Ind. Aerodyn., 88, 139–151, doi:10.1016/
S0167-6105(00)00045-3.
Stawiarski, C.,K. Träumner, C.Knigge, andR.Calhoun, 2013: Scopes
and challenges of dual-Doppler lidar wind measurements—
An error analysis. J. Atmos. Oceanic Technol., 30, 2044–2062,doi:10.1175/JTECH-D-12-00244.1.
Stull, R. B., 1988:An Introduction to BoundaryLayerMeteorology.
Kluwer Academic, 666 pp.
Taylor, G. I., 1938: The spectrum of turbulence. Proc. Roy. Soc.
London, 164A, 476–490, doi:10.1098/rspa.1938.0032.
von Kármán, T., 1948: Progress in the statistical theory of turbu-
lence. Proc. Natl. Acad. Sci. USA, 34, 530–539, doi:10.1073/
pnas.34.11.530.
Werner, C., 2005: Dopper wind lidar.Lidar: Range-ResolvedOptical
Remote Sensing of the Atmosphere, C.Weitkamp, Ed., Springer
Series in Optical Sciences, Vol. 102, Springer, 325–354.
2144 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 33
Unauthenticated | Downloaded 10/12/21 06:09 AM UTC