Embed Size (px)
Citation preview

EUM/Issue <No.><Date>
Jochen GrandellConvection Working Group Meeting27 – 30 March 2012, Prague
Geostationary lightning monitoring with the Meteosat Third Generation Lightning Imager (MTG LI)
Slide: 1EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic
EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Lightning Detection from Space – from LEO to GEO
OTD (1995-2000)
LIS (1997-present)
Feasibility of lightning detection from space by optical sensors has been proven by NASA instruments since 1995 on low earth
orbits (LEO)
Results from LIS/OTD: Global lightning distribution
Annual flash density

EUM/Issue <No.><Date>
Lightning Detection from Space – from LEO to GEO
Geostationary Lightning Imager
(GLI) on FY-4 (China)
Lightning Imager (LI) on MTG
(Europe)
GEO lightning missions in preparation by several agencies (in USA, Europe, China) for this decade...
...all of these are building on LIS/OTD heritage
Geostationary Lightning Mapper
(GLM) on GOES-R (USA)
2015 2018 2014 ?EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
The LI on MTG measures Total Lightning: Cloud-to-Cloud Lightning (IC) and Cloud-to-Ground Lightning (CG)
The MTG Lightning Imager (LI)
Main objectives are to detect, monitor, and extrapolate in time:
• Development (Intensity/Movement) of active convective areas
• Monitoring of storm lifecycle
• Lightning climatology & Chemistry (NOx production)
Main benefit from GEO observations:
homogeneous and continuous observations delivering
information on location and strength of lightning flashes to the users with a timeliness
of 30 seconds
LIS/OTD flash density in the MTG LI field of view
GEO observation of lightning is complementary to ground-based networks, some of
which are for local applications very good

EUM/Issue <No.><Date>
...Air Traffic is one area of application, and not just around major airports...
Slide: 7

EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Slide: 9
Detection of a Lightning Optical Signal
• Lightning with a background signal changing with time:
• Lightning on top of a bright background is not recognised by its bright radiance, but by its transient short pulse character
• For detection of lightning, a variable adapting threshold has to be used for each pixel which takes into account the change in the background radiance
• (in LIS: background calculated as a moving average)
Lightning signal
Background
Time
Radiationenergy
NightDay
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
From a Lightning Optical Signal to MTG LI Events
• Detection of events in a nutshell:
• Output (=events) of the Lightning Imager at L0 is two-fold:
Background scene tracking and removal
ThresholdingEvent
detection
False event filtering needed in L0-L1 processing
• True lightning events (triggered by a lightning optical signal)
• False events (not related to lightning)
From a Lightning Optical Signal to MTG LI Events
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Spatial Pattern of Lightning from Space
• Characteristics:– Size scales with cloud thickness above source– Mean area of lightning pulses corresponds well to a 10 km x 10 km footprint
Possible schema of detected lightning pulses
1. Background scene tracking and removal
2. Thresholding3. Event
detection
“MTG LI Events”
etc...
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic
Optical pattern of lightning on cloud
surface (observed from space shuttle)

EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
MTG LI Product Processing – L1b and L2 products
• The following products are resulting from the L1b processing: – Events with geolocation, UTC
time stamp and calibrated radiance
– background images, mainly supporting navigation
• The baseline L2 product, which is a result of clustering of events in time and space, consists of:– Groups (representing lightning
strokes)– Flashes (1st priority for many
users)
Example L2 Sequence:
“Events”
“Flashes”
“Groups”
Product processing in a nutshell
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
From events/groups/flashes towards DENSITY (1)
• For a quick-look, a forecaster or other operational user might prefer a density product.
• Can be based on:• Events • groups• flashes
• ...and with a variety of temporal windows
Slide: 14
Events density simulation based on converted LINET data from 2
July 2009(15 minutes density)
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
From events/groups/flashes towards DENSITY (2)
Slide: 15
Animation of EVENT
DENSITY simulation
-
Based on converted LINET data from 2 July
2009(15 minutes
density)

EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Challenge for processing: “False Events”
• False events are typically caused by:
• High energy particle collisions
• Noise (instrument, spacecraft etc)
• Solar glint• Spacecraft motion
(“jitter”)
• Specific filters are required for each case:
Radiation filter
Shot noise/coherency filter
Solar glint filter
® Contrast filter
Rough order of severity (based on GLM analysis):
Spacecraft motion, Photon/electronics noise, Solar glint, Radiation EUM/MTG/VWG/
12/0278March 2012Prague, Czech Republic
EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic
EUM/Issue <No.><Date>
User Readiness (1)
• User readiness, as discussed here is to be understood as activities similar to what NOAA is attempting with the "GOES-R Proving Ground" framework of activities.
• Within this framework, an approach of creating "pseudo-GLM" data based on averaging and resampling ground-based Lightning Mapping Array (LMA) lightning density data has been developed:
http://www.goes-r.gov/users/pg-activities.html
• This “pseudo-GLM” data has been provided to forecasters in real-time along with other data to support their daily work.
Slide: 19
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
User Readiness (2)
• The idea is to make the forecaster end-user aware, and used to, the kind of product that would be available from the GLM.
• This is not perfect proxy data: It merely gives an "impression" of how the real GLM product could look like.
• EUMETSAT is planning a similar activity by using the existing proxy data methodology with the ground-based LINET data in Europe
• A near-real time application of the proxy data will be needed
• Data to be disseminated to selected Meteorological Services for evaluation and feedback
Slide: 20
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Topics of Presentation
• Lightning Detection from Space – from LEO to GEO observations
• EUMETSAT Meteosat Third Generation (MTG) – Lightning Imager
• Concept• Product processing
• Challenges• User Readiness• Summary
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Summary
• One of the new instruments on the Meteosat Third Generation (MTG) is the Lightning Imager (LI),
• geostationary services from 2017 onwards
• continuous lightning observation (CG+CC) over almost the full disk (at 0 deg).
• Algorithm and processor development for baseline L2 products (event/group/flash –tree) currently ongoing
• Supported by a MTG Lightning Imager Science Team (LIST) set up in 2009
• Interacting with potential users (such as CWG) an important topic in coming years
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic
EUM/Issue <No.><Date>
• The MTG LI Science Team currently consists of the following members:
– N.N. (MetOffice – UK)– Daniele Biron (USAM – Italy)– Eric Defer (LERMA – France)– Ullrich Finke (U. Hannover – Germany)– Hartmut Höller (DLR – Germany)– Philippe Lopez (ECMWF)– Douglas Mach (NASA – USA)– Antti Mäkelä (FMI – Finland)– Serge Soula (Laboratoire d'Aerologie – France)
MTG Lightning Imager Science Team (LIST)
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
Thank you!
EUM/MTG/VWG/12/0278March 2012Prague, Czech Republic

EUM/Issue <No.><Date>
How noise looks like on a 0.5s period
Slide: 25
FER = 1 000 /s
FER = 400 000 /sFER = 100 000 /s
FER = 300 000 /sFER = 40 000 /s
FER = 10 000 /s
FER = 5 000 /s
FER = 200 000 /sFER = 30 000 /s
All noise events in 500 milliseconds!

EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
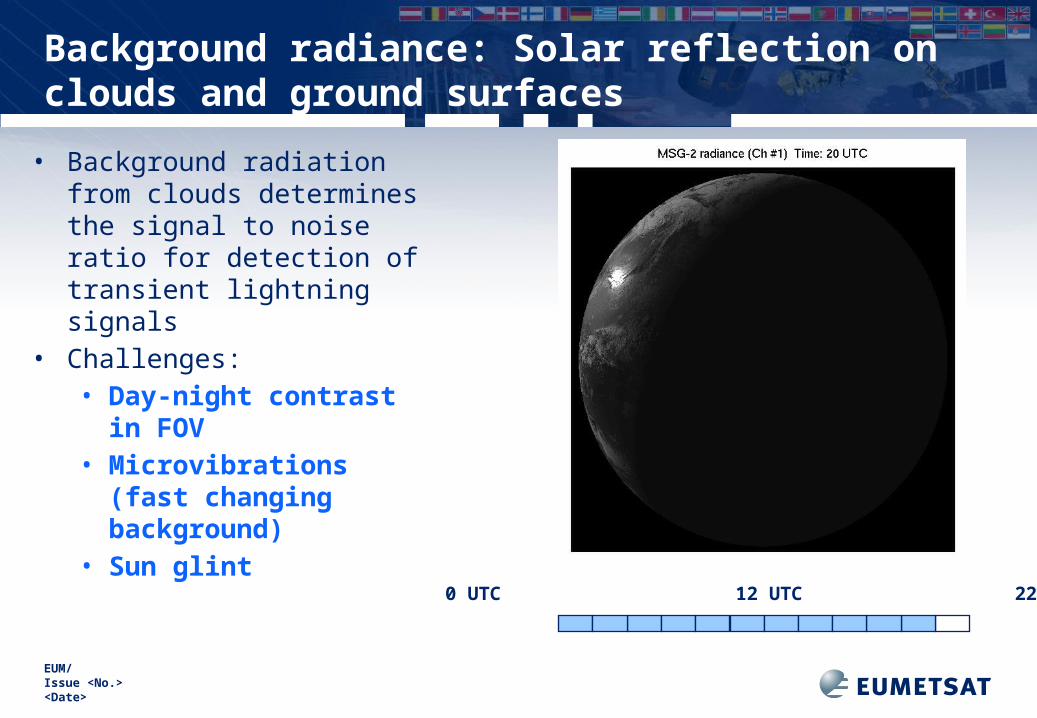
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint

EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint

EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint

EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint

EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint
EUM/Issue <No.><Date>
0 UTC 12 UTC 22 UTC
Background radiance: Solar reflection on clouds and ground surfaces
• Background radiation from clouds determines the signal to noise ratio for detection of transient lightning signals
• Challenges: • Day-night contrast in
FOV• Microvibrations (fast
changing background)
• Sun glint

EUM/Issue <No.><Date>
Effect of Microvibrations (“jitter”) on Lightning Detection
Slide: 32
Assuming that this is what the Lightning Imager is looking at...
CloudDarker (ocean) background
Background energy
Distance
Darker (ocean)
background
Cloud
EUM/Issue <No.><Date>
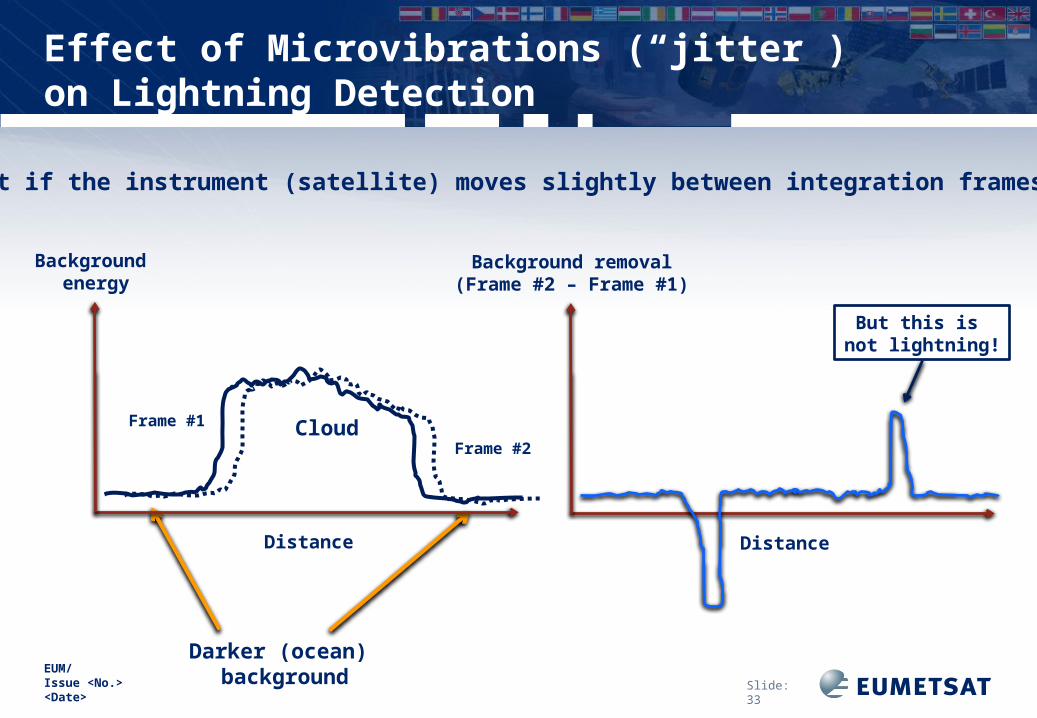
Effect of Microvibrations (“jitter”)on Lightning Detection
Slide: 33
What if the instrument (satellite) moves slightly between integration frames...?
Cloud
Darker (ocean) background
Background energy
Distance
Frame #1
Frame #2
Background removal(Frame #2 – Frame #1)
Distance
But this is not lightning!

EUM/Issue <No.><Date>
MSGMOP/MTP
Observation mission:- MVIRI: 3 channels
Spinning satelliteClass 800 kg
Observation missions:- SEVIRI: 12 channels- GERB
Spinning satellite Class 2-ton
1977 2017 and 20192002
Atmospheric Chemistry Mission (UVN-S4):via GMES Sentinel 4
Implementation of the EUMETSAT Mandate
for the Geostationary Programme
Meteosat Third Generation (MTG): Continuity and Evolution of EUMETSAT Services
MOP/MTP MSG
MTG-I and MTG-S
Observation missions: - Flex.Comb. Imager: 16 channels - Infra-Red Sounder- Lightning Imager- UVN3-axis stabilised satellites Twin Sat configuration Class 2,5 - 3 ton

EUM/Issue <No.><Date>
MTG in Orbit Deployment Scenario
MSG-4
MTG-I1 Dec. 2016
MTG-I2 Dec. 2022
MTG-I3 Jan. 2025
MTG-I4 Dec. 2029
MTG-S1 June 2018
MTG-S2 June 2026
2017 – 2038: 20 years of Operational Service – Imaging Missions
2019 – 2035: 15.5 years of Operational Service – Sounding Mission

EUM/Issue <No.><Date>
Slide: 36
MTG Lightning Imager Science Team (LIST)
• EUMETSAT has identified the need to establish a scientific baseline for the operational processor of the MTG mission.
• In support of these scientific developments, a science team has been established – MTG LI Science Team (LIST).
• The main objectives of the team is to:
• Assist EUMETSAT with the implementation of the MTG LI L2 scientific baseline processor.
• Prepare an Algorithm Theoretical Baseline Document (ATBD). It includes also a description of the proxy dataset, to be used for algorithm development and processor development.
• The ATBD will be subject for review at the Preliminary Design Review (PDR) concluding the MTG system Phase B activities
EUM/Issue <No.><Date>
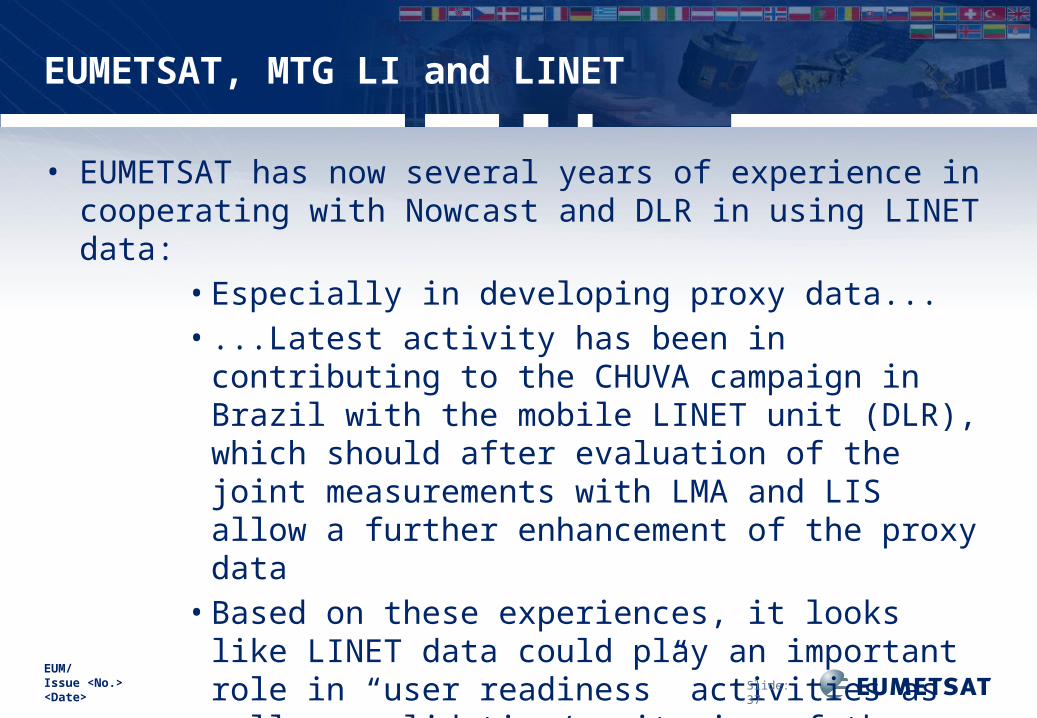
EUMETSAT, MTG LI and LINET
• EUMETSAT has now several years of experience in cooperating with Nowcast and DLR in using LINET data:
• Especially in developing proxy data...• ...Latest activity has been in contributing to the
CHUVA campaign in Brazil with the mobile LINET unit (DLR), which should after evaluation of the joint measurements with LMA and LIS allow a further enhancement of the proxy data• Based on these experiences, it looks like LINET
data could play an important role in “user readiness” activities as well as validation/monitoring of the operational product(s) from the MTG LI
Slide: 37

EUM/Issue <No.><Date>
MTG LI – Main Mission Requirements
• Wavelength 777.4 nm
• Sensitivity pulses as small as 100 km2 with energies down to 4 µJ/(m2sr) should
be detected• Spatial sampling
Less or equal to 10 km at 45oN for the sub-satellite longitude• Detection Efficiency
70% in average, 90% over central Europe, 40% as a minimum over EUMETSAT member states
• False Alarm Rate 2.5 false flashes/s
• Background images every 60 seconds
![Jan Grandell - KTH · PDF fileTime series analysis Jan Grandell. 2. ... The course Time series analysis is based on the book [7] ... 9.2 Multivariate time series](https://img.pdfslide.us/doc/110x75/5a8695cb7f8b9a882e8d0877/jan-grandell-kth-series-analysis-jan-grandell-2-the-course-time-series-analysis.jpg)

























