Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Journal of the Franklin Institute 351 (2014) 579–588
0016-0032/$3http://dx.doi.o
☆This work61203002), thfor the Centr(ZR2012FQ01Talents in Un
nCorresponE-mail ad
www.elsevier.com/locate/jfranklin
Short communication
Estimator design of discrete-time switched positivelinear systems with average dwell time$
Xudong Zhaoa,b,n, Zhandong Yua, Xuebo Yanga, Hongyi Lia
aCollege of Engineering, Bohai University, Jinzhou 121013, ChinabCollege of Information and Control Engineering, China University of Petroleum, Qingdao 266555, China
Received 25 May 2013; received in revised form 10 August 2013; accepted 7 September 2013Available online 18 September 2013
Abstract
This paper is concerned with the problem of state estimation for a class of discrete-time switched positivelinear systems (SPLS) with average dwell time (ADT) switching. By utilizing the multiple linear copositiveLyapunov function (MLCLF) approach, the ADT switching is introduced to tackle the state estimation ofthe underlying system. Some sufficient conditions of the existence of the estimator are derived in terms of aset of linear matrix inequalities for the underlying systems with ADT switching. The results for the SPLSunder arbitrary switching can be easily obtained by reducing MLCLF to the common linear copositiveLyapunov function used for the system in the literature. Finally, a numerical example is given to show thevalidity of the obtained theoretical results.& 2013 The Franklin Institute. Published by Elsevier Ltd. All rights reserved.
1. Introduction
State estimation and filtering have become important research topics since their many practicalapplications in control and signal processing [1,2]. Indeed, various types of estimator and filter,such as the well-known Kalman filter and H1 filter, are widely used in many areas [3–5], and
2.00 & 2013 The Franklin Institute. Published by Elsevier Ltd. All rights reserved.rg/10.1016/j.jfranklin.2013.09.006
was partially supported by the National Natural Science Foundation of China (61203123, 60904001,e Doctoral Fund of Ministry of Education of China (20092302120071), the Fundamental Research Fundsal Universities, China (11CX04044A), the Shandong Provincial Natural Science Foundation, China9), the Program for New Century Excellent Talents in University, and the Program for Liaoning Excellentiversity (LR2013053).ding author at: College of Engineering, Bohai University, Jinzhou 121013, China. Tel.: þ86 18678460772.dresses: [email protected], [email protected] (X. Zhao).

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588580
they have received much attention in recent years due to their success in application andimportance in theory.As a special class of multiple-mode systems [6–11], the so-called switched positive linear
systems (SPLS), consisting of a family of positive linear systems and a switching signalgoverning the switching among them, has been recently paid much attention in controlcommunities. Typical applications of the systems can be found in many fields, such ascongestion control applications, formation flying, networks employing TCP [12], to list a few. Sofar, some useful results on SPLS have been obtained in the literature, but mainly focusing on thestability analysis by common linear copositive Lyapunov function (CLCLF) approach [13].Based on the CLCLF approach, the stability analysis and stabilization problems of SPLS havebeen successfully tackled in both continuous-time and discrete-time contexts, see for example[14,15], and the references therein.However, to the best of the author's knowledge, the basic problem for SPLS, concerning state
estimation, still has not been investigated in the literature. Furthermore, all the resultsaforementioned for SPLS are concerned with arbitrary switching laws. As we all know, in certainsense, the switching events in general switched systems could be classified into uncontrolled(arbitrary) or controlled ones [16], which, respectively, result from the system itself and thedesigners' intervention [17–19]. As pointed out in [20], the average dwell time (ADT) switchingis a class of controlled switching signals [21]. It has been also well known that the ADT schemecharacterizes a larger class of switching signals than dwell time scheme, and its extreme case isactually the arbitrary switching [22–26].Therefore, it is of theoretical and practical significance to consider the state estimation of SPLS
with ADT switching. But it is worth mentioning that, up to date, although a few efforts have beendevoted to proposing the stability and stabilization conditions of SPLSs with ADT switching[27,28], little effort is paid to the state estimation of SPLS with ADT switching, which motivatessome future research issues. Two of the issues will be discussed toward the end of the paper:as far as the ADT is concerned, can the efficient multiple linear copositive Lyapunovfunction (MLCLF) [7] be explored for state estimation of SPLSs? If yes, how can such a MLCLFbe formulated to design the state estimator and the corresponding ADT switching for agiven SPLS?In this paper, the state estimation problems of SPLS with ADT switching will be investigated
in discrete-time context. The main contribution of this paper can be summarized: the MLCLF fora given SPLS is firstly established. Based on MLCLF approach, the state estimator and thecorresponding ADT switching are designed for SPLS. The layout of the remainder is as follows.Section 2 reviews necessary definitions and lemmas on the stability analysis of both positivesystems and general switched systems. In Section 3, some sufficient conditions of the existenceof the estimator for SPLS with ADT are presented by constructing a MLCLF. A numericalexample is given in Section 4 to demonstrate the feasibility of the proposed techniques. Finally,conclusions are presented in Section 5.Notations: In this paper, the notations used are fairly standard. Amac; sc; 0 ðA≽0Þ means
that all elements of matrix A are positive (nonnegative). R, Rn and Rn�n denote the fieldof real numbers, n-dimensional Euclidean space and the space of n� n matrices with realentries, respectively; Rn
þ stands for the nonnegative orthant in Rn; the notation JxJ ¼∑n
k ¼ 1jxkj, where xk is the kth element of xARn. In addition, the notation P40 ðZ0Þ meansthat P is a real symmetric and positive definite (semi-positive definite) matrix. Thefollowing descriptions of elements of matrices are used throughout the paper: Ap ¼ ½apij�,Bp ¼ ½bp1; bp2;…; bpn�.

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588 581
2. Problem statements and preliminaries
We first recall some preliminaries about positive linear system for the introduction of discrete-time SPLS hereafter. Given the following system:
xðk þ 1Þ ¼ AxðkÞ; AARn�n ð1Þwhere xðkÞARn is the state vector.
Definition 1 (Farina and Rinaldi [14]). System (1) is said to be positive if initial conditionxð0Þ≽0 implies that the corresponding trajectory xðkÞ≽0 for all kZ0.
Lemma 1 (Farina and Rinaldi [14]). System (1) is positive if and only if A≽0.
Now, let us consider the following SPLS consisting of a family of subsystems (1):
xðk þ 1Þ ¼ ∑M
p ¼ 1δpðsðkÞÞApxðkÞ; xð0Þ≽0
yðkÞ ¼ ∑M
p ¼ 1δpðsðkÞÞCpxðkÞ
8>>>><>>>>:
ð2Þ
where xðkÞARnþ is the state vector, and yðkÞARr is the output. sðkÞ is a piecewise constant
function of time, called a switching signal, which takes its values in the finite set S¼ f1;…;Mg,M is the number of subsystems. Also, for a switching sequence 0ok1o⋯okiokiþ1o⋯;sðkÞis continuous from right everywhere and may be either autonomous or controlled. WhenkA ½ki; kiþ1Þ, we say the sðkiÞth subsystem is active. The two-matrix pair ðApARn�n;CpARr�nÞ; 8sðkÞ ¼ pAS, represents the pth subsystem or pth mode of Eq. (2), whereAp≽0; 8pAS, and
δpðsðkÞÞ ¼1 if sðkÞ ¼ p
0 otherwise
�ð3Þ
Remark 1. It is clear that the trajectories of SPLS (2) always stay in the positive orthant for anyswitching signals by Definition 1 and Lemma 1.
Our purpose is to determine a nonnegative approximation xðkÞ of the state x(k) by thefollowing estimator such that the error ~xðkÞ ¼ xðkÞ� xðkÞ converges to zero:
xðk þ 1Þ ¼ ∑M
p ¼ 1δpðsðkÞÞApxðkÞ þ ∑
M
p ¼ 1δpðsðkÞÞGpðyðkÞ�yðkÞÞ; xð0Þ ¼ 0
yðkÞ ¼ ∑M
p ¼ 1δpðsðkÞÞCpxðkÞ
8>>>><>>>>:
ð4Þ
Then, the error dynamic system is obtained by combining the estimator (4) and system (2), andcan be described by the following equation:
~xðtÞ ¼ ðAðkÞ þ GðkÞCðkÞÞ~xðkÞ; ~xð0Þ≽0 ð5Þwhere AðkÞ ¼∑M
p ¼ 1δpðsðkÞÞAp; GðkÞ ¼∑Mp ¼ 1δpðsðkÞÞGp and CðkÞ ¼∑M
p ¼ 1δpðsðkÞÞCp.

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588582
We present the following exponential stability definition of system (2) for later development.
Definition 2 (Liberzon [20]). The equilibrium x¼0 of system (2) is globally uniformlyexponentially stable (GUES) under certain switching signal sðkÞ if for initial conditions xðk0Þ,there exist constants α40, 0oηo1 such that the solution of the system satisfiesJxðkÞJrαηðk� k0Þ Jxðk0ÞJ ; 8kZk0.
Therefore, in this paper, we aim at designing an estimator (4) and finding a set of admissibleswitching signals with ADT property, such that the error dynamic system (5) is GUES, i.e., theerror state ~xðkÞ ¼ xðkÞ�xðkÞ converges to zero. For this purpose, let us first revisit the definitionof the ADT property.
Definition 3 (Hespanha and Morse [29]). For a switching signal sðkÞ and each k2Zk1Z0, letNsðk2; k1Þ denote the number of discontinuities of sðkÞ in the interval ðk1; k2Þ. We say that sðkÞhas an average dwell time τa if there exist two positive numbers N0 (we call N0 the chatter boundhere) and τa such that
Ns k2; k1ð ÞrN0 þk2�k1τa
; 8k2Zk1Z0
Remark 2. In Definition 3, it is noted that Nsðt2; t1ÞrN0 þ ðt2� t1Þ=τa3ðt2� t1Þ=ðNsðt2; t1Þ�N0ÞZτa; 8 t2Z t1Z0, which means that on an average the ‘dwell time’between any two consecutive switchings is not smaller than a common constant τa.
3. Main results
In the following theorem, we are in a position to design an estimator in the form of Eq. (4) andthe corresponding ADT switching to estimate the state of the SPLS (2), which is equivalent toprovide the stability conditions for the error system (5) under ADT switching.
Theorem 1. Consider the error system (5), and let 0oλo1, μ41 be given constants. If thereexist a set of vectors vp ¼ ½vp1; vp2;…; vpn�TARn
þ; pAS, and matricesUp ¼ ½up1; up2;…; upn�ARr�n such that, 8ðp, qÞAS� S, paq,
Φp ¼ diagfϕp1;ϕp2;…;ϕpngr0 ð6Þ
Πpq ¼ diagfπpq1; πpq2;…; πpqngr0 ð7Þ
uTpkCpITk′ þ vpkI kApIT
k′Z0; ðk; k′ÞAk� k¼ f1; 2;…; ng ð8Þwhere
ϕpk ¼ ∑n
k′ ¼ 1I kC
Tp upk′ þ I kðAT
p þ ðλ�1ÞIÞvp; πpqk ¼ vpk�μvqk; kAk
with I k ¼ ½0;…; 0zfflfflffl}|fflfflffl{k�1
; 1; 0;…; 0zfflfflffl}|fflfflffl{n� k
�, then, the system is GUES for any switching signal with ADT
τaZτna ¼ � ln μ
lnð1�λÞ ð9Þ

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588 583
Moreover, the corresponding state estimator (4) for the SPLS (2) can be determined asfollows:
Gp ¼up1vp1
;up2vp2
;…;upnvpn
� �Tð10Þ
Proof. For any K40; k0 ¼ 0, we denote k1; k2…ki; kiþ1;…kNsðT ;0Þ the switching times on theinterval ½0;K�, and we establish the MLCLF for error system (5) as follows:
VsðkÞðk; ~xðkÞÞ ¼ ~xT ðkÞ ∑M
p ¼ 1δpðsðkÞÞvp ¼ ~xT ðkÞξðkÞ ð11Þ
where vpARnþ; ξðkÞ ¼∑M
p ¼ 1δpðsðkÞÞvp. First, by system (8), it can be seen that
apkk′ þ v�1pk uTpkcpk′Z0; 8ðk; k′ÞAk� k ð12Þ
It follows from Eqs. (10) and (12) that Ap ¼ Ap þ GpCp≽0; 8pAS, which together with Lemma1 and Remark 1 gives ~xðkÞ≽0; 8kZ0.
Also, it is straightforward to obtain from Eq. (7) that, 8ðp; qÞAS� S; paq,
vp�μvq⪯0
Then, it arrives at, 8ðsðkiÞ ¼ p, sðki�1Þ ¼ qÞAS� S; paq,
~xT ðkiÞvprμ~xT ðkiÞvq ð13ÞBy Eq. (3), one can get
∑M
p ¼ 1δpðsðkiÞÞ ¼ ∑
M
q ¼ 1δqðsðki�1ÞÞ ¼ 1 ð14Þ
This, together with Eq. (13), gives
~xT ðkiÞ ∑M
p ¼ 1δpðsðkiÞÞvprμ~xT ðkiÞ ∑
M
q ¼ 1δqðsðki�1ÞÞvq ð15Þ
Therefore,
VsðkiÞðki; ~xðkiÞÞ ¼ ~xT ðkiÞξðkiÞrμVsðki �1Þðki; ~xðkiÞÞ ¼ μ~xT ðkiÞξðki�1Þ ð16Þ
On the other hand, one can obtain from Eq. (6) that, 8pAS
aTpkvp þ ðλ�1Þvpk þ cTpk∑nk′ ¼ 1upk′ r0; 8kAk
This, together with Eq. (10), yields, 8pAS
ðAp þ GpCpÞTvp þ ðλ�1Þvp ¼ ðAp þ ðλ�1ÞIÞTvp⪯0Combining this and Eq. (14) gives
∑M
p ¼ 1δpðsðkÞÞAT
p vp þ ðλ�1Þ ∑M
p ¼ 1δpðsðkÞÞvp ¼ A
Tp ξðkÞ þ ðλ�1ÞξðkÞ⪯0

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588584
This implies
~xT ðkÞATp ξðkÞ þ ðλ�1Þ~xT ðkÞξðkÞ ¼ ~xT ðk þ 1ÞξðkÞ þ ðλ�1Þ~xT ðkÞξðkÞr0
i.e., VsðkÞðk þ 1, ~xðk þ 1ÞÞr ð1�λÞVsðkÞðk; ~xðkÞÞ. Then, for any kA ½ki; kiþ1�, it holds thatVsðkÞðk; ~xðkÞÞr ð1�λÞVsðk�1Þðk�1; ~xðk�1ÞÞ
r ð1�λÞ2Vsðk�2Þðk�2; ~xðk�2ÞÞ⋯r ð1�λÞk� kiVsðkiÞðki; ~xðkiÞÞ¼ ð1�λÞk� ki ~xT ðkiÞξðkiÞ ð17Þ
It then follows from Eqs. (9), (16) and (17) that
~xT Kð Þξ Kð Þr ð1�λÞK� kNs ~xT kNs
� �ξ kNs
� �rμð1�λÞK� kNs ~xT kNs
� �ξ kNs �1� �
rμð1�λÞK� kNs ð1�λÞkNs � kNs � 1 ~xT kNs �1� �
ξ kNs �1� �
⋯rμNs ð1�λÞK� k0 ~xT k0ð Þξ k0ð Þrexp N0 ln μ
� exp
K
τaln μþ ln 1�λð ÞK
� ~xT 0ð Þξ 0ð Þ
Define ɛ1 ¼minðk;pÞAk�Sfvpkg and ɛ2 ¼maxðk;pÞAk�Sfvpkg, then it is immediate that
J ~x Kð ÞJrɛ2ɛ1eð1=2ÞN0 ln μe�ð1=2Þð� lnð1� λÞ� ln μ=τaÞK J ~x 0ð ÞJ ð18Þ
Thus, by denoting α¼ ðɛ2=ɛ1Þeð1=2ÞN0 ln μ; η¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiexpðlnð1�λÞ þ ln μ=τaÞ
p, it can be seen from
Eq. (18) that J ~xðKÞJrαηk� k0 Jxðk0ÞJ ; 8kZk0. Finally, one knows that, if Eqs. (6)–(8) hold,the error system (5) is GUES for any switching signal with ADT (9) by Definition 3, i.e., the stateestimator (4) can track asymptotically the actual state of SPLS (2). □
Remark 3. In Theorem 1, based on MLCLF, a set of mode-dependent estimators and thecorresponding switching signals with ADT property are designed to ensure the stability of errorsystem (5). Also, note that the obtained conditions are in terms of LMIs, which can beconveniently verified via LMI toolbox or Sedumi and Yalmip in Matlab.
As an extreme case, if the criterion in the above theorem is satisfied when μ-1, i.e., τa-0, itmeans that the constraint on the switching times is almost eliminated and the resulting switchingcan be arbitrary. In that scenario, we could use the CLCLF to design the estimator (4) for SPLS(2). Now, we reduce the MLCLF (11) to the CLCLF of the following form and
Vðk; ~xðkÞÞ ¼ ~xT ðkÞv ð19ÞThen, some sufficient conditions for checking the existence of the CLCLF that guarantees thestability of error system (5) under arbitrary switching can be obtained in the following corollary.
Corollary 1. If there exist matrices V ¼ diagfv1; v2;…; vng40 and Up ¼ ½up1; up2;…;upn�ARr�n such that, 8pAS
Θ¼ diagfθp1; θp2;…; θpngo0 ð20Þ

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588 585
vkI kApITk′ þ uTpkCpIT
k′Z0; ðk; k′ÞAk� k ð21Þwhere θpk ¼∑n
k′ ¼ 1I kCTp upk′ þ I kA
Tp v�v; kAk, v¼ ½v1; v2;…; vn�T , then, the error system (5)
has a CLCLF in form (19), which ensures that the error system is GUES under arbitraryswitching. Moreover, the corresponding state estimator (4) for the SPLS (2) can be determinedas follows:
Gp ¼up1v1
;up2v2
;…;upnvn
� �Tð22Þ
Remark 4. The proof of Corollary 1 can be obtained in the same vein as the proof of Theorem1. An example in the next section will show the validity of the obtained criteria.
4. Numerical example
In this section, a numerical example in discrete-time domain is provided to illustrate theeffectiveness of the developed results in this paper.
Example 1. Consider the switched linear systems consisting of two positive subsystemsdescribed by
A1 ¼0:4 0:6
0:8 0:3
� �; A2 ¼
0:3 0:9
0:6 0:4
� �;
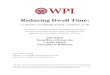
C1 ¼ ½0:5 0:2�; C2 ¼ ½0:2 0:5�:The trajectory of such a SPLS will obviously remain in the positive orthant if xð0Þ≽0. Our purposehere is to design a set of mode-dependent state estimators in the form of Eq. (4) and find theadmissible switching signals with ADT property such that the resulting error system is GUES. Fora given parameter μ¼ 2, based on Theorem 1 in this paper, it will be found that there are feasiblesolutions when λr0:73, i.e., the admissible ADT is τaZτna ¼ 0:52. Moreover, we can get thefeasible solutions for the MLCLF and the corresponding estimator gains as follows:
v1 ¼ ½241:6279 580:7937�T ; v2 ¼ ½480:9894 291:7568�TG1 ¼ ½�0:7857 �1:4936�T ; G2 ¼ ½�1:4952 �0:7924�T
Fig. 1. State estimation performance under switching signal sðtÞ with τa ¼ 0:55.

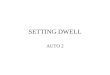
Fig. 2. State estimation performance under switching signal sðtÞ with τa ¼ 0:55.
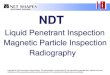
Fig. 3. State responses of the error system under switching signal sðtÞ with τa ¼ 0:55.
X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588586
To verify the correctness of the theoretical results obtained above, let us now generate apossible switching sequences by ADT with τa ¼ 0:55, the state estimation performances areshown in Figs. 1 and 2, under the initial state condition ~xð0Þ ¼ ½5 10�T , and the state responses ofthe error system are depicted in Fig. 3. From Figs. 1 to 3, we can see that the resulting errorsystem is stable, i.e., the state estimator tracks the actual state of the estimated SPLS.
5. Conclusions
The state estimation problems have been investigated for switched positive linear systems withADT switching are studied in this paper. A multiple linear copositive Lyapunov function(MLCLF) has been established for the estimator design of the switched positive systems withADT switching. Formulated in terms of a set of LMIs, sufficient criterion of the existence of the

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588 587
estimator for the underlying system has been developed in discrete-time domain. The result canbe reduced to the case for the switched positive systems under arbitrary switching. A numericalexample has been presented to verify the theoretical method. The problems of the system withother classes of switching signals will be considered in our future work.
References
[1] H.R. Karimi, A delay-dependent approach to robust filtering for LPV systems with discrete and distributed delaysusing PPDQ functions, International Journal of Control, Automation and Systems 5 (2) (2007) 170–183.
[2] Z.R. Xiang, C.H. Qiao, M.S. Mahmoud, Robust H1 filtering for switched stochastic systems under asynchronousswitching, Journal of the Franklin Institute 349 (2012) 1213–1230.
[3] H. Liu, Y. Shen, X. Zhao, Delay-dependent observer-based H1 finite-time control for switched systems with time-varying delay, Nonlinear Analysis: Hybrid Systems 6 (3) (2012) 885–898.
[4] J. Cheng, H. Zhu, S. Zhong, Y. Zhang, Finite-time boundness of H1 filtering for switching discrete-time systems,International Journal of Control, Automation and Systems 10 (6) (2012) 1129–1135.
[5] W. Liu, H. Zhang, Z. Wang, A novel truncated approximation based algorithm for state estimation of discrete-timeMarkov jump linear systems, Signal Processing 91 (4) (2011) 702–712.
[6] H. Liu, Y. Shen, Finite-time stabilization and boundedness of switched linear system under state-dependentswitching, Journal of the Franklin Institute 350 (2013) 541–555.
[7] X. Liu, W. Yu, L. Wang, Stability analysis of positive systems bounded time-varying delays, IEEE Transactions onCircuits and Systems (II) 56 (7) (2009) 600–604.
[8] B. Niu, J. Zhao, Robust H1 control of uncertain nonlinear switched systems using constructive method,International Journal of Control, Automation and Systems 10 (3) (2012) 481–489.
[9] X. Zhao, L. Zhang, P. Shi, M. Liu, Stability and stabilization of switched linear systems with mode-dependentaverage dwell time, IEEE Transactions on Automatic Control 57 (7) (2012) 1809–1815.
[10] X. Zhao, P. Shi, L. Zhang, Asynchronously switched control of a class of slowly switched linear systems, Systems& Control Letters 61 (12) (2012) 1151–1156.
[11] X. Zhao, L. Zhang, P. Shi, H. Karimi, Novel stability criteria for T–S fuzzy systems, IEEE Transactions on FuzzySystems 21 (6) (2013) 1–11.
[12] O. Mason, R. Shorten, On linear copositive Lyapunov functions and the stability of switched positive linear systems,IEEE Transactions on Automatic Control 52 (7) (2007) 1346–1349.
[13] L. Gurvits, R. Shorten, O. Mason, On the stability of switched positive linear systems, IEEE Transactions onAutomatic Control 52 (6) (2007) 1099–1103.
[14] L. Farina, S. Rinaldi, Positive Linear Systems, Wiley Interscience Series, New York, 2000.[15] X. Xue, Z. Li, Asymptotic stability analysis of a kind of switched positive linear discrete systems, IEEE
Transactions on Automatic Control 55 (9) (2010) 2198–2203.[16] J. Lian, J. Zhao, Sliding mode control of uncertain switched delay systems via hysteresis switching strategy,
International Journal of Control, Automation and Systems 8 (6) (2010) 1171–1178.[17] X. Sun, W. Wang, G. Liu, J. Zhao, Stability analysis for linear switched systems with time-varying delay, IEEE
Transactions on Circuits and Systems (II) 38 (2) (2008) 528–533.[18] X. Zhao, Q. Zeng, Stabilization of jump linear systems with mode-dependent time-varying delays, Optimal Control
Applications and Methods 32 (2011) 139–152.[19] Z.G. Feng, K.L. Teo, V. Rehbock, A discrete filled function method for the optimal control of switched systems in
discrete time, Optimal Control Applications and Methods 30 (6) (2009) 585–593.[20] D. Liberzon, Switching in Systems and Control, Birkhauser, Berlin, 2003.[21] L. Chen, Y. Leng, H. Guo, L. Zhang, h1 control of a class of discrete-time Markov jump linear systems with
piecewise-constant TPs subject to average dwell time switching, Journal of the Franklin Institute 349 (2012)1989–2003.
[22] H. Lin, P.J. Antsaklis, Stability and stabilizability of switched linear systems: a survey of recent results, IEEETransactions on Automatic Control 54 (2) (2009) 308–322.
[23] D. Zhang, L. Yu, A. Zhang, Delay-dependent fault detection for switched linear systems with time-varying delaysthe average dwell time approach, Signal Processing 91 (4) (2011) 832–840.

X. Zhao et al. / Journal of the Franklin Institute 351 (2014) 579–588588
[24] L. Zhang, E.K. Boukas, P. Shi, Z. Chen, A μ�dependent approach to H1 control of uncertain switched linearsystems with average dwell time, Optimal Control Applications and Methods 32 (1) (2011) 15–27.
[25] L. Zhang, P. Shi, E.K. Boukas, C. Wang, H1 control of switched linear discrete-time systems with polytopicuncertainties, Optimal Control Applications and Methods 27 (5) (2006) 273–291.
[26] L. Zhang, H. Gao, Asynchronously switched control of switched linear systems with average dwell time,Automatica 46 (5) (2010) 953–958.
[27] J. Zhang, Z. Han, Robust stabilization of switched positive linear systems with uncertainties, International Journal ofControl, Automation and Systems 11 (1) (2013) 41–47.
[28] J. Zhang, Z. Han, J. Huang, Stabilization of discrete-time positive switched systems, Circuits, Systems and SignalProcessing 32 (3) (2012) 1129–1145.
[29] J.P. Hespanha, A.S. Morse, Stability of switched systems with average dwell time, in: Proceedings of the 38th IEEEConference on Decision and Control, Phoenix, AZ, 1999, pp. 2655–2660.