Embed Size (px)
Citation preview

ARTICLE IN PRESS
Journal of Econometrics 134 (2006) 419–440
0304-4076/$ -
doi:10.1016/j
�CorrespoE-mail ad
(H.-J. Wang)
www.elsevier.com/locate/jeconom
Estimation of technical and allocativeinefficiency: A primal system approach
Subal C. Kumbhakara,�, Hung-Jen Wangb
aDepartment of Economics, State University of New York—Binghamton, Binghamton, NY 13902, USAbInstitute of Economics, Academia Sinica, Taipei 115, Taiwan
Available online 15 August 2005
Abstract
The estimation of technical and allocative inefficiencies using a flexible (translog) cost
system is found to be quite difficult, especially when both the inefficiencies are random. In this
paper we use the alternative primal system consisting of the production function (translog)
and the first-order conditions of cost minimization. The estimation of the primal system is
more straightforward and it enables us to estimate observation-specific technical and
allocative inefficiencies, and their impact on input demand and cost. We use data on steam-
electric generating plants from the U.S. to estimate the model using both Cobb–Douglas and
translog production functions.
r 2005 Elsevier B.V. All rights reserved.
JEL classification: C31; D21
Keywords: Cost and production functions; Cost and production systems; Technical change; Returns to
scale
1. Introduction
A quarter of a century ago Schmidt and Lovell, 1979 (SL hereafter) proposedestimating technical and allocative inefficiencies jointly in a cost minimizing
see front matter r 2005 Elsevier B.V. All rights reserved.
.jeconom.2005.07.001
nding author. Tel.: 001 607 777 4762; fax: 001 607 777 2681.
dresses: [email protected] (S.C. Kumbhakar), [email protected]
.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440420
framework using the Cobb–Douglas production function system. The system ofequations they used consists of the production function and the first-orderconditions (FOCs) of cost minimization. The estimation of such a primal systemcan produce observation-specific estimates of technical and allocative inefficiencies.For a Cobb–Douglas production function (which is self-dual), the cost of technicaland allocative inefficiencies (observation-specific) can also be derived analytically.
An alternative to this primal approach is to use a cost system consisting of a costfunction and the cost share equations, especially when a flexible functional form isused. Although widely used in productivity and efficiency studies, the cost systemapproach has several limitations when both technical and allocative inefficiencies areintroduced into the model. Since both technical and allocative inefficiencies increasecost, it is often of interest to estimate the increased cost associated with each type ofinefficiency. To do so we need additional information coming from either the costshare equations or the input demand functions. From a modeling point of view, themain problem is: How does one link allocative inefficiency (usually the errors in thecost share equations) with the cost of allocative inefficiency (in the cost function) in atheoretically consistent manner?1 Establishing the linkage is necessary in order toformulate the econometric model based on the cost system. A second relatedproblem is: What are the justifications and interpretations of the noise/error terms(that are routinely appended before estimation) in the cost function and cost shareequations?2 Finally, is it possible to estimate the cost system (using the maximumlikelihood (ML) technique with cross-sectional data) assuming that both technicaland allocative inefficiency are random?
Some of the above-mentioned problems (outlined in detail in Section 2) are toodifficult to address in a cost system. Because of these difficulties, either strongassumptions are made regarding the link between allocative inefficiency and anincrease in cost therefrom (Bauer, 1985; Melfi, 1984), or producers are assumed to beallocatively efficient. We avoid these difficulties by using the primal approach of SL(1979). We extend their approach and use a flexible (translog) production function.In this approach observation-specific estimates of technical and allocativeinefficiencies can be easily obtained after the model is estimated. Since the costfunction associated with the translog production function cannot be analyticallyderived, algebraic expressions for the cost of technical and allocative inefficienciescannot be derived. To compute the impact of technical and allocative inefficiencieson input demand, we solve the primal production system numerically for input
1The joint estimation of technical and allocative inefficiencies in a translog cost function presents a
difficult problem (Greene, 1980). This is labeled as the Greene problem (Bauer, 1990). Recently,
Kumbhakar (1997) proposed a solution for the Greene problem using a translog cost system, but an
empirical estimation of this model has been restricted to panel data models in which technical and
allocative inefficiencies are either assumed to be fixed parameters or parametric functions of the data and
unknown parameters. Kumbhakar and Tsionas (2005a, b), who used a Bayesian approach, is an
exception.2Note that the error/noise term in the production function does not always get transmitted to the cost
function (in log) in a linear fashion. It depends on the functional form used to represent the production
technology.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 421
quantities (with and without inefficiency). These results are then used to compute theeffect of technical and allocative inefficiencies on cost. Thus, we obtain observation-specific estimates of technical and allocative inefficiencies as well as the increasedcost associated with each of these inefficiency components.
The rest of the paper is organized as follows. In Section 2 we describe the costsystem approach that accommodates both technical and allocative inefficiencies andpoint out the difficulties in estimating such a system. The primal production systemwith both technical and allocative inefficiencies is developed in Section 3. Data aredescribed in Section 4. Section 5 discusses the results and Section 6 contains ourconclusions.
2. Cost system approach with technical and allocative inefficiencies
The production function for a typical producer (i) with output-oriented (OO)technical inefficiency (Aigner et al., 1977; Meeusen and van den Broeck, 1977) can berepresented as
yi ¼ f ðxiÞ � eðvi�uiÞ; i ¼ 1; 2; . . . ; n, (1)
where f ð�Þ is the production frontier, x is the vector of inputs, v is productionuncertainty (noise), and uX0 is OO technical inefficiency, which can be interpretedas the percent loss of output, ceteris paribus, due to technical inefficiency.3 The costminimization problem for a typical producer is (omitting the subscript i)
minw � x s:t: y ¼ f ðxÞev�u, (2)
where w is the vector of input prices.4 The FOCs of the above problem can beexpressed implicitly as
f j
f 1
¼wj
w1exj ¼
wsj
w1; j ¼ 2; . . . ; J, (3)
3It is often argued that the input-oriented (IO) technical inefficiency is more appropriate in a cost
minimizing framework. This is because in a cost minimization framework the econometric model explicitly
recognizes the endogeneity of inputs, and the IO technical inefficiency is directly interpreted in terms of
input overuse and cost increase therefrom. In contrast, in the OO model of Aigner et al. (1977) inputs are
assumed to be exogenous. Thus, it is argued that the OO model is inappropriate in the cost minimizing
framework. This is true if one estimates the production function in a single-equation framework that does
not recognize the endogeneity of inputs. However, if the OO model is formulated in such a way that the
endogeneity of inputs is recognized and a cost interpretation of the OO technical inefficiency is given, it
can then be argued that the choice between the IO and OO technical inefficiency specification is a matter of
convenience in estimation. This point will be elaborated later in detail.4Here we follow the formulation used by Hoch (1958, 1962), Mundlak and Hoch (1965), and Schmidt
and Lovell (1979, 1980) and assume that the firm minimizes cost conditional on u and v. An alternative is
to evaluate the production function in the above cost minimization problem at the ‘‘point expectation’’ of
v, which is 0 (Fuss et al., 1978). In doing so one assumes that v is unknown to the firm when input
allocation decision is made, and then appends an ad hoc noise term once the derivation of the cost
function is completed. We avoid this ad hoc approach by appending the noise term from the beginning, as
in Schmidt and Lovell. Either way, the FOCs given in (3) are not affected.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440422
where wsj ¼ wje
xj and xja0 is input allocative inefficiency for the input pair ðj; 1Þ.5
This definition of allocative inefficiency, used by SL (1979), is appropriate, because aproducer is allocatively inefficient when it fails to allocate inputs in a way thatequates the marginal rate of technical substitution (MRTS) with the ratio ofrespective input prices.
The above minimization problem can be written as a standard neoclassical costminimization problem, viz.,
minws � x s:t: yeu�v ¼ f ðxÞ, (4)
in which the FOCs (given y; v; u, n, and w) are exactly the same as above. Theadvantage of positing the problem in the above format is that stochastic noise, aswell as technical and allocative inefficiencies are already built-into the aboveoptimization problem, and there is no need to append any extra error terms in an adhoc fashion at the estimation stage. Moreover, all the standard duality results gothrough, although the model we consider here allows for the presence of statisticalnoise, and technical and allocative inefficiencies. For example, the solution of xj (theconditional input demand function) can be expressed as xj ¼ xjðw
s; yeu�vÞ;j ¼ 1; . . . ; J. These input demand functions can be used to define the cost function,
csð�Þ ¼ ws � xð�Þ, which can be implicitly expressed as
csð�Þ ¼ cðws; yeu�vÞ. (5)
Note that csð�Þ is neither the actual cost nor the minimum cost function. Theformer is the cost of inputs used at the observed prices, while the latter is the cost ofproducing a given level of output without any inefficiency. The cost function csð�Þ isan artificial construct that is useful for exploiting the duality results. Since csð�Þ isderived from the neoclassical optimization problem in which the relevant inputprices are ws and output is yev�u, it can be viewed as the minimum cost functionwhen prices are ws and output is yev�u. Thus, if one starts from the csð�Þ function,Shephard’s lemma can be used to obtain the conditional input demand functions(i.e., qcsð�Þ=qws
j ¼ xjð�Þ). Equivalently,
q ln csð�Þ
q lnwsj
¼ws
j xjð�Þ
csð�Þ) xjð�Þ ¼
csð�Þ
wsj
ssj ð�Þ,
where ssj ð�Þ ¼
q ln csð�Þ
q lnwsj
. ð6Þ
The actual cost ca can then be expressed as
ca ¼X
j
wjxjð�Þ ¼X
j
wsj xjð�Þ wj=ws
j
� �¼ csð�Þ
Xj
ssj ð�Þðwj=ws
j Þ,
5These FOCs and therefore xj ’s are independent of whether the noise term v or its ‘‘point expectation’’
(Fuss et al., 1978) is used in specifying the production function. The same holds for the OO technical
inefficiency term u.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 423
) ln ca ¼ ln csð�Þ þ ln ss1 þ
XJ
j¼2
ssj ð�Þe
�xj
" #. ð7Þ
The above equation relates actual/observed cost with the unobserved cost functioncsð�Þ, and the formulation is complete once a functional form on csð�Þ is chosen. Forexample, if csð�Þ is assumed to be Cobb–Douglas, then the above relationshipbecomes
ln ca ¼ a0 þX
j
aj lnwsj þ ay lnðye
u�vÞ þ ln a1 þXJ
j¼2
aje�xj
" #,
¼ a0 þXJ
j¼1
aj lnwj þ ay ln yþ ayðu� vÞ þXJ
j¼2
ajxj þ ln a1 þXJ
j¼2
aje�xj
" #.
ð8Þ
Furthermore, the actual cost share equations are
saj ¼wj xj
ca¼
csð�Þ
exj
aj
ca¼ aje
�xj a1 þXJ
k¼2
ake�xk
( )�1,
¼ aj þ aje�xj
a1 þPJ
k¼2 ak e�xk
� 1
" #( ),
) saj � aj þ ljðnÞ; j ¼ 2; . . . ; J, ð9Þ
where the cost share errors (lj) are functions of allocative errors (n), and they aretherefore related to the cost of allocative inefficiency defined below. The aboverelationship can also be directly derived from the Cobb–Douglas productionfunction along with the FOCs of cost minimization.
The cost function in (8) can be written as
ln ca ¼ ln c0ð�Þ þ ln cu þ ln cv þ ln cx, (10)
where ln c0 ¼ a0 þ lnPJ
j¼1 aj
h iþPJ
j¼1 aj lnwj þ ay ln y is the minimum (neoclassical)
cost function (frontier). The percentage increase in cost due to technical inefficiency,ln cu (when multiplied by 100), is ln cu ¼ ðln ca � ln caju¼0Þ ¼ ay uX0. Similarly, the
percentage increase in cost due to input allocative inefficiency (ln cx ¼
ln ca � ln cajxj¼0 8jÞ, when multiplied by 100, is
PJj¼2 ajxj þ ln a1 þ
PJj¼2 aje
�xj
h i�
lnPJ
j¼1 aj
h i. Production uncertainty can either increase or decrease cost since
ln cv ¼ ln ca � ln cajv¼0 ¼ �ay v_0, depending on vw0.
It is clear from Eqs. (8) and (9) that the error components in the above system arequite complex. The input allocative inefficiency term (xj) appears in a highly non-linear fashion in both the cost function and cost share equations. Consequently, anestimation of the model (the cost function and the cost share equations specifiedabove) based on distributional assumptions on xj , u, and v is quite difficult. The main

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440424
problem in deriving the likelihood function is that the elements of n appear in theabove system in a highly non-linear fashion. Alternatively, if one makes adistributional assumption on the cost share errors lj (which are also non-linearfunctions of the elements of n), then to derive the likelihood function one has toexpress xj in terms of l, because xjs appear in the cost function. Thus, even if onestarts from a Cobb–Douglas production function, the estimation of the cost systemis difficult (a closed-form expression of the likelihood function is not possible).Another potential problem is in solving xj from ljðnÞ which might have multiplesolutions of xj.
Similar results are obtained if one uses a translog function for ln csð�Þ. The actualcost function is
ln ca ¼ ln csð�Þ þ ln ss1 þ
Xj
ssj ð�Þ e
�xj
( ), (11)
where
ln csð�Þ ¼ a0 þX
aj lnwsj þ ay lnðye
u�vÞ þ1
2
Xj
Xk
ajk lnwsj lnws
k
þ1
2ayyflnðye
u�vÞg2 þX
j
ajy lnwsj lnðye
u�vÞ, ð12Þ
and
ssj ð�Þ ¼ aj þ
Xk
ajk lnwsk þ ajy lnðye
u�vÞ. (13)
The cost function in (11) can be written as
ln ca ¼ ln c0 þX
j
ajxj þ ayðu� vÞ þX
j
Xk
ajk lnwjxk
þ1
2
Xj
Xk
ajk xjxk þX
j
ajy xj ln y
þX
j
ajyxjðu� vÞ þ ayy ln yðu� vÞ þ1
2ayyðu� vÞ2
þ ln ss1 þ
Xj
ssj ð�Þe
�xj
( ), ð14Þ
where the frontier (minimum) cost function, c0ð�Þ, is given by
ln c0ð�Þ ¼ a0 þX
j
aj lnwj þ ay ln yþ1
2
Xj
Xk
ajk lnwj lnwk þ1
2ayy ln y2
þX
j
ajy lnwj ln y. ð15Þ

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 425
Finally, the actual cost share equations are
saj ¼wjxjð�Þ
ca¼
csð�Þ
exj
ssj ð�Þ
ca¼
ssj ð�Þe
�xj
ss1 þ
PJk¼2 ss
kð�Þe�xk
; j ¼ 2; . . . ; J, ð16Þ
¼ s0j ð�Þ þss
j ð�Þe�xj
ss1 þ
PJk¼2 ss
kð�Þe�xk
� s0j ð�Þ
" #� s0j ð�Þ þ ljðx; u; v; and dataÞ, ð17Þ
where ssj ð�Þ is written as
ssj ð�Þ ¼ s0j þ
Xk
ajkxk þ ajyðu� vÞ, (18)
and
s0j ð�Þ ¼ aj þX
k
ajk lnwk þ ajy ln y. (19)
The above translog cost system in (14) and (16) is more complex than theCobb–Douglas cost system, because OO technical inefficiency (u) and the noise termðvÞ enter non-linearly in the cost system, and they also interact with the inputallocative inefficiency components (xj) as well as output and input prices. In otherwords, it is not possible to estimate the translog cost system using the standard MLmethod starting from distributional assumptions on u; v and xj .
If the underlying production function is homogeneous of degree r, then it satisfiesthe following parametric restrictions, viz.,
Pj aj ¼ r,
Pk ajk ¼ 0 8 j; ayy ¼
0; ajy ¼ 0 8 j. Consequently, the cost function (in log) is linear in u and v (as inthe Cobb–Douglas case), but the non-linearity in x is not eliminated. Thehomogeneous assumption will allow us to write the cost function asln ca ¼ ln c0ð�Þ þ ln cu þ ln cv þ ln cx. That is, the cost function (in log) can beexpressed as the sum of the frontier cost plus percentage changes in cost (whenmultiplied by 100) due to technical and input allocative inefficiencies, and productionuncertainty. An estimation of the model is still difficult because of the non-linearitiesin x. Unless the parameters of the cost system are estimated consistently, the costs oftechnical and input allocative inefficiencies cannot be computed (although algebraicexpressions for an increase in cost due to technical and input allocative inefficienciesare known). In other words, in the case of a homogeneous production function, thecost system formulation has the advantage of obtaining analytical solutions ofln cu; ln cv; ln cx, but an econometric estimation of the model is still difficult.
If we use the IO technical inefficiency formulation, then the production functioncan be written as
y ¼ f ðxe�ZÞev, (20)
where ZX0 is IO technical inefficiency. It shows, when multiplied by 100, the percentby which all the inputs are over-used.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440426
The FOCs of the cost minimization problem associated with the above productionfunction are as follows:
f jðxe�ZÞ
f 1ðxe�ZÞ¼
wjexj
w1�
wsj
w1. (21)
Following the procedure in Kumbhakar (1997), it can be shown that the resultingcost system is
ln ca ¼ ln c�ðws; ye�vÞ þ ln s�1 þXJ
j¼2
s�j e�xj
( )þ Z, ð22Þ
saj ¼wjxj
ca¼
s�j e�xj
s�1 þPJ
k¼2 s�ke�xk
. ð23Þ
Note that the only difference between c�ð:Þ and csð:Þ is that c�ð:Þ depends on ye�v
while csð:Þ depends on yeðu�vÞ. The same is true for s�j ð:Þ ¼ q ln c�=qwsj and ss
j ð:Þ.It is clear from the cost function in (22) that ln ca � ln cajZ¼0 � ln cZ ¼ Z. Thus,
Z� 100 is the percentage increase in input use as well as the percentage increase incost. The OO technical inefficiency, u in (7), cannot be interpreted in the samemanner, i.e., ln ca � ln caju¼0au. However, we can express u in terms of Z and makeuse of the cost (input over-use) interpretation of Z. For example, the cost functionassociated with OO technical inefficiency using a Cobb–Douglas productionfunction is given in (8). Since for a Cobb–Douglas cost function r ¼ 1=ay, from(8) we get ln cu ¼ ln ca � ln caju¼0 ¼ ay u ¼ u=r. Thus, Z ¼ ln cZ ¼ ln cu, and there-fore, a cost increase due to IO and OO technical inefficiencies is the same, and we cansimply label ln cu as the cost of technical inefficiency. Similarly, following thedefinition of IO technical inefficiency, we have ln xjju � ln xjju¼0 ¼ ln caju�
ln caju¼0 ¼ Z. Thus, if one solves for the input demand functions (or the costfunction), then Z can be obtained from either ln xjju � ln xjju¼0 or ln caju � ln caju¼0.In other words, u is automatically converted to Z when one examineseitherln xjju � ln xjju¼0, or ln caju � ln caju¼0.
In sum, we conclude that no matter how technical inefficiency is specified, a costincrease due to both IO and OO technical inefficiencies is the same. However, anestimation of the cost system even for the Cobb–Douglas case is difficult. We avoidthis difficulty by using an alternative approach, viz., the primal approach, which isdiscussed next. Although analytical expressions for ln cu; ln cv, and ln cx are notavailable, we can compute them numerically by solving a system of non-linearequations for each observation.
3. The primal system
It is possible to avoid the estimation problem discussed in the preceding section ifone starts from the production function and uses a system consisting of theproduction function and the first-order conditions of cost minimization. Note that

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 427
this system is algebraically equivalent to the cost system for self-dual productionfunctions. The only difference is that one starts from a parametric productionfunction, instead of a cost function. We start from the production function (either aCobb–Douglas or a translog)
ln y ¼ ln f ðxÞ þ v� u, (24)
and write down the FOCs of cost minimization, viz.,
f j
f 1
¼wj
w1exj )
q ln f
q ln xj
q ln f
q ln x1
�sj
s1¼
wjxj
w1x1exj ,
) ln sj � ln s1 � lnðwjxjÞ þ lnðw1x1Þ ¼ xj ; j ¼ 2; . . . J. ð25Þ
We interpret xjð‘0Þ as allocative inefficiency for the input pair ðj; 1Þ. Thus, forexample, if x2o0) w2e
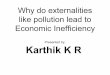
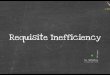
x2ow2, then input x2, relative to input x1, is over-used. Theestimation results are invariant to the choice of input used as numeraire in (25).Fig. 1 shows it graphically for the case of two inputs.
Assume that there is no technical inefficiency. The input quantities given by pointA are used to produce output level y0. However, the optimal input quantities aregiven by point B which is the tangency point between the isoquant and the isocostline, i.e., MRTS ¼ f 1=f 2 ¼ w1=w2. At point A the equality f 1=f 2 ¼ w1=w2 is notsatisfied. The dotted isocost line is tangent to the observed input combination (pointA). That is, the observed input quantities are optimal with respect to the input price
w1
w2
2
w1
w2e ξ
A
B
x1
y0
x2
Fig. 1. Input allocative inefficiency without technical inefficiencies.

ARTICLE IN PRESS
B′
A′
A
B
x1
x2
O
1
2
ww
y 0
y 0eu
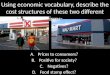
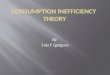
Fig. 2. Input allocative inefficiencies with output-oriented measure of technical inefficiencies.
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440428
ratio w1=w2ex2 . A departure from the optimality condition (MRTS ¼ w1=w2) is
shown by the difference in slopes of the dotted and the solid isocost line. Failure onthe part of the producer to allocate inputs optimally by equating MRTS with therespective price ratios (given by point B) is viewed as allocative inefficiency.6
Now assume that the producer is technically inefficient, i.e., y ¼ f ðxÞe�u (ignoringthe presence of the stochastic noise component, v). Point A in Fig. 2 shows anobserved input combination where the output produced is y0. We write theproduction function as yeu ¼ f ðxÞ, which shows a neutral shift of the isoquant fromy0 to y0e
u4y0.Allocative inefficiency can now be defined in terms of the new isoquant y0e
u� �
.Given the prices, the allocatively efficient input combination is shown by point B,whereas, the actual input combination is given by point A (which is made technicallyefficient by shifting the isoquant). Allocative inefficiency is shown by the differencein the slope of the ðy0e
uÞ isoquant between points A and B.Since technical inefficiency shifts the production function neutrally, the slope of
the isoquant will be unchanged. Thus, one can define allocative inefficiency withrespect to the y0 isoquant by dropping down radially from points A to A0 and B toB0. Allocative inefficiency can then be represented by the difference in the slopes ofthe y0 isoquant between points A0 and B0.7
6It is worth mentioning that such failures may not be a mistake, especially if producers face other
constraints in input allocations (e.g., regulatory constraints).7Note that the slopes of the isoquants at A and A0 (B and B0) are the same.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 429
The error structure of the primal system described in (24) and (25) is simpleenough to derive the joint probability density function of the error vector that isnecessary to define the likelihood function. A derivation of the joint pdf requiresdistributional assumptions to be made on the error components. Here, we make thefollowing assumptions (some of which are relaxed later):
v�Nð0;s2vÞ, ð26Þ
u�Nþð0;s2Þ; (truncated at zero from below), ð27Þ
n�MVNð0;SÞ, ð28Þ
xj are independent of v and u. ð29Þ
The assumptions on v and u are standard in the efficiency literature, althoughother distributions such as exponential and truncated normal can be used for u (see,e.g., Kumbhakar and Lovell, 2000). Since xj can take both positive and negativevalues (meaning that inputs can be over-used or under-used), it is convenient andreasonable to assume normal distributions on allocative errors.8 The finalassumption of independence is for simplicity.9
With the above distributional assumptions, the joint probability distribution ofv� u and n is
f ðv� u; nÞ ¼ gðv� uÞ � hðnÞ, (30)
where
gðv� uÞ ¼2
sfðv� uÞ
s
� �F�ðv� uÞsu
svs
� �, (31)
and fð�Þ and Fð�Þ are the pdf and cdf of a standard normal variable, respectively, ands ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffis2u þ s2v
p. The multi-variate normal pdf for n is given by hðnÞ.
The likelihood function for the system in (24) and (25) is
L ¼ gðv� uÞ � hðnÞ � jJj, (32)
where jJj is the determinant of the Jacobian matrix, viz.,
jJj ¼qðv� u; x2; x3; . . . ; xJÞ
qðln x1; ln x2; . . . ; ln xJÞ
��������. (33)
The Jacobian is necessary for the model because inputs (x) are endogenous under thecost minimization assumption.
8Note that the cost shares appear in logs in the FOCs and are in difference form. Thus, although the
shares are limited between 0 and 1, ln sj � ln s1 for j ¼ 2; . . . ; J will not be constrained to take only positive
or negative values.9Schmidt and Lovell (1980) allowed a positive correlation between u and jxj j, j ¼ 2; . . . ; J.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440430
The log-likelihood function, for the ith observation, is
lnLi ¼ constant�1
2ln s2 þ lnf
ðvi � uiÞ
s
þ lnF �
ðvi � uiÞsu
svs
�1
2ln jSj �
1
2n0iS�1ni þ ln jJij. ð34Þ
The likelihood function can be concentrated with respect to S. The elements of S,sjk, can be obtained from
sjk ¼1
N
Xi
xjixki; j; k ¼ 2; . . . ; J,
and therefore
S ¼1
N
Xi
nin0i. (35)
Substituting (35) into the above log-likelihood function gives the concentrated log-likelihood function. The observation sum of this concentrated log-likelihoodfunction can be maximized to obtain the ML estimates of the parameters.
After estimating the parameters, one would like to obtain (observation-specific)estimates of OO technical inefficiency (u) and input allocative inefficiency (n). Thetechnical inefficiency u (for each observation) can be estimated using the Jondrow etal. (1982) formula, viz., Efujðv� uÞg, which for the present model is
Efujðv� uÞg ¼ m� þ s�fðm�=s�ÞFðm�=s�Þ
, (36)
where m� ¼ �ðv� uÞs2u=s2 and s� ¼ susv=s.
Allocative inefficiency xj for the input pair (j; 1) can be obtained from the residualsof the FOCs. The sign of xj shows whether input j is over or under-used relative toinput 1. If xj40, then input j is under-used relative to input 1. However, the extent ofover-use (under-use) of inputs cannot be inferred from the values of xj alone. Forthis we need to derive the input demand function, which is not possible (analytically)for the translog production function. Instead, one can compute the extent of theover-use (under-use) of inputs numerically (discussed later).
While the estimates of OO technical and input allocative inefficiencies are usefuleconomically, one might be interested in computing the effect of these inefficiencieson cost. This is because what matters most to cost-minimizing producers is by howmuch the cost is increased due to inefficiency. To address this issue, first we compute(numerically) the impact of u and n on ln xj. These results are then used to computethe impact of u and n on cost.10
10Note that the impact of u on the (log of) input demand is nothing but Z which is also the percentage
increase in cost due to technical inefficiency.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 431
4. Data
We use data on fossil-fuel fired steam-electric power generation plants (investor-owned utilities) in the United States.11 A panel data (1986–1996) on 72 electricutilities are used in this study. The sources of the data are: Energy InformationAdministration, the Federal Energy Regulatory Commission, and the Bureau ofLabor Statistics.
The output is net steam-electric power generation in megawatt-hours which isdefined as the amount of power produced using fossil-fuel fired boilers to producesteam for turbine generators in a given period of time. The variable inputs are: laborand maintenance (L), fuel (F), and capital (K). The price of labor and maintenance(wL) is a cost-share weighted price for labor and maintenance. The quantities oflabor and maintenance are obtained from the cost of labor and maintenance dividedby its price. The price of fuel (wF ) is the average price of fuel (coal, oil and gas) indollars per BTUs. The fuel quantity (F) is obtained from dividing the fuel cost by thefuel price. The price of capital (wK ) is calculated using the Christensen and Jorgenson(1970) cost of capital formula. Finally, capital stock is measured using the estimatesof capital cost discussed in Considine (2000). We also use the time trend (t) tocapture technical change.
5. Empirical results
5.1. Econometric model and results
Appending the time trend variable (t) as a regressor and introducing the firm andtime subscripts i and t, the translog production function can be expressed as
ln yit ¼ a0 þX
j
aj ln xjit þ at tþ1
2
Xj
Xk
ajk ln xjit ln xkit þ att t2
" #
þX
j
ajt ln xjit tþ vit � uit; j ¼ labor; fuel and capital. ð37Þ
The corresponding FOCs (using labor as the numeraire) are
ln sjit � ln s1it � lnðwjitxjitÞ þ lnðw1itx1itÞ ¼ xjit; j ¼ fuel and capital, (38)
where
sjit ¼ aj þX
k
ajk ln xkit þ ajt t; j ¼ fuel and capital.
The likelihood function of the model, which consists of the production function in(37) and the FOCs in (38), is obtained from (34). We concentrated the likelihood
11We thank Spiro Stefanou for providing the data to us. Details on the construction of the data set can
be found in Rungsuriyawiboon and Stefanou (2003).

ARTICLE IN PRESS
Table 1
Estimated production function parameters
Cobb–Douglas Translog
var. coef. (std.err.) var. coef. (std.err.) var. coef. (std.err.)
cons 4.899*** (0.112) cons 1.786** (0.863)
l 0.167*** (0.003) l 0.272*** (0.049) lf 0.022** (0.011)
f 0.569*** (0.007) f 0.441*** (0.105) lk 0.004 (0.010)
k 0.269*** (0.004) k 0.794*** (0.089) lt 0.001 (0.001)
t 0.021*** (0.003) t 0.049* (0.029) fk 0.098*** (0.008)
ll �0.055*** (0.009) ft �0.002 (0.002)
ff �0.119*** (0.015) kt �0.0001 (0.001)
s2u 0.154*** (0.012) kk �0.126*** (0.013) s2u 0.147*** (0.011)
s2v 0.012*** (0.002) tt �0.002 (0.002) s2v 0.012*** (0.002)
log likelihood �933.985 log likelihood �840.597
l ¼ lnL, lf ¼ lnL lnF , etc.; Significance: ***: 1% level; **: 5% level; *: 10% level.
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440432
function in order to get rid of the parameters associated with S. The remainingparameters of the model are estimated by maximizing the concentrated log-likelihood function. We estimate both the Cobb–Douglas and the translogproduction functions. The Cobb–Douglas model is obtained by imposing parameterrestrictions (e.g., ajk ¼ 0, ajt ¼ 0, and att ¼ 0) in (37) and (38). The parameterestimates are presented in Table 1. All the parameters (except 6 out of 15 in thetranslog case) are statistically significant. The parameter restrictions of theCobb–Douglas model are overwhelmingly rejected by the likelihood ratio test.Thus, the translog model (although it has some insignificant parameters) issupported by the data.
Based on the estimated parameters we compute several statistics that are ofinterest to economists. First, we estimate the returns to scale (RTS) from
RTSit ¼X
j
q ln yit
q ln xjit
�X
j
aj þX
k
ajk ln xkit þ ajt t
!, (39)
which is a constant ðP
j ajÞ for the Cobb–Douglas case, but is observation-specific forthe translog model. The Cobb–Douglas model predicts constant (unitary) RTS,while a slightly decreasing RTS (although not statistically different from unity) isobserved at the mean of the data for the translog model. Estimates of RTS in thetranslog model range from 0.89 to 1.12. These results suggest that most of the electricutilities in our sample are operating at their efficient scale (minimum point of theaverage cost curve), and therefore are not likely to benefit from increasing their sizes.Other studies in the literature (e.g., Atkinson and Primont, 2002; Christensenand Greene, 1976, and Rungsuriyawiboon and Stefanou, 2003) also found RTS closeto unity.

ARTICLE IN PRESS
Table 2
Summary statistics of inefficiency, RTS and TC
Cobb–Douglas Translog
mean (std.dev.) mean (std.dev.)
RTS 1.005 RTS 0.988
TC 0.021 TC 0.020
E(u) 0.307 (0.225) E(u) 0.301 (0.219)
xF�0.010 (0.504) xF
�0.006 (0.661)
xK�0.013 (0.509) xK
�0.016 (0.687)
Ctech Calloc Ctech Calloc
mean 0.396 0.035 mean 0.389 0.050
25% 0.146 0.006 25% 0.155 0.005
50% 0.263 0.016 50% 0.266 0.022
75% 0.486 0.035 75% 0.488 0.050
Ctech ¼ ðw0 ~xÞ=ðw0xoÞ � 1, Callo ¼ ðw0 �xÞ=ðw0xoÞ � 1.
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 433
We also compute and report (in Table 2) technical change (TC) from
TCit ¼q ln yit
qt� at þ
Xj
ajt ln xjit þ att t, (40)
which is a constant ðatÞ for the Cobb–Douglas case but is observation-specific for thetranslog model. Both the Cobb–Douglas and the translog model predict technicalprogress at the rate of about 2% per year, which is lower than what Atkinson andPrimont (2002) found (3.7%) based on a longer but narrower panel of electricutilities in a comparable time period. We find large variations in TC for the translogmodel (ranging from 0.86% to 3.42% with a standard deviation of 0.57%). A 2%technical progress per year means an increase in output, on average, by 2% per year,holding everything constant. With unitary RTS, this also means that cost hasdecreased at the rate of 2%, everything else being the same.
To obtain an observation-specific estimate of OO technical inefficiency (u), we usethe Jondrow et al. (1982) result; that is, estimate u from u ¼ Eðujv� uÞ in whichðv� uÞ is replaced by the residuals of the production function. To save space wereport only the mean values of u in Table 2 for both the Cobb–Douglas and thetranslog models. The results show that, on average, the electric utilities produce 30%less than their maximum potential output due to the technical inefficiency.12 Giventhat electric utilities mostly operate with excess capacity (to meet peak demand), thepresence of a somewhat large OO technical inefficiency might not be surprising.
We next examine input allocative inefficiency x for fuel and capital (relative tolabor). Since the mean values of xF and xK are negative (�0:01 and �0:013 for the
12This 30% reduction in output is equivalent to a 39% increase in cost, holding output constant.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440434
Cobb–Douglas, and �0:006 and �0:016 for the translog), this means that expðxF Þo1and expðxK Þo1, and that labor/fuel and labor/capital ratios are on average lowerthan the cost minimizing ratios. This result shows that capital is over-used relative toboth labor and fuel (the Averch–Johnson hypothesis). An over-use of capital(relative to fuel and labor) follows from the fact that ðwK=wF Þ expðxK Þ=expðxF ÞowK=wF and wK expðxK Þ=wLowK=wL when evaluated at the mean valuesof xF and xK . Similar qualitative results are also obtained by Atkinson and Primont(2002) and Rungsuriyawiboon and Stefanou (2003). Based on the observation-specific values, we find that about 50% of the firms over-used capital relative to bothlabor and fuel.13 The percentage of firms that have over-used capital increasedsubstantially when systematic input allocative errors are allowed in the model. Thisis discussed in Section 5.3.
As mentioned before, the estimates of x for each pair of inputs tell us whether aninput is relatively over-used (under-used). However, the degree of over-use (under-use) cannot be inferred from the estimates of xj. To quantity the effects, we need toderive the input demand function, which, for the Cobb–Douglas model, is
ln xj ¼ aj þ1
r
XJ
k¼1
ak lnwk � lnwj þ1
rln yþ
1
r
XJ
k¼2
akxk � xj �1
rðv� uÞ,
j ¼ 2; . . . ; J,
ln x1 ¼ a1 þ1
r
XJ
k¼1
ak lnwk � lnw1 þ1
rln yþ
1
r
XJ
k¼2
akxk �1
rðv� uÞ,
where r ¼XJk¼1
ak; aj ¼ ln aj �1
ra0 þ
XJ
k¼1
ak ln ak
" #; j ¼ 1; . . . ; J. ð41Þ
The input demand function in (41) has four parts: (i) the part not dependent on u, xand v (often labeled as the neoclassical input demand functions); (ii) the partdependent on input allocative inefficiency x, which is 1=r
PJk¼2 akxk � xj for
j ¼ 2; . . . ; J, while for input x1 it is 1=rPJ
k¼2 akxk; (iii) the part dependent on OOtechnical inefficiency u (i.e., u=r); and (iv) the part dependent on v (i.e., �v=r). Since r
is RTS (degree of homogeneity), given everything else being equal, a higher r meanslower values for each of the above components.
From the above equation we can see that due to input allocative inefficiency,
demand for xj is changed by ½ln xjjx¼x� � ½ln xjjx¼0� ¼ 1=rPJ
k¼2 akxk � xj percent for
j ¼ 2; . . . ; J, while for input x1 it is changed by 1=rPJ
k¼2 akxk percent. Since xj can be
positive or negative, the presence of input allocative inefficiency can either increase
or decrease demand for an input. Note that xj are the residuals of the FOCs in (38).
To examine the effect of technical inefficiency on input demand, we first note thatu=r ¼ Z for a Cobb–Douglas production model. Therefore, the effect of OO and IOtechnical inefficiencies on input demand is obtained from ½ln xjju¼u� � ½ln xjju¼0� ¼
13This result is not surprising, because the model does not allow systematic allocative inefficiency, i.e.,
EðxjÞ ¼ 08j.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 435
ð1=rÞ u ¼ ½ln xjjZ¼Z� � ½ln xjjZ¼0� ¼ ZX0 for j ¼ 1; . . . ; J. Thus, demand for eachinput is increased by ð1=rÞ u ¼ Z percent due to both OO and IO technicalinefficiencies. Because of this it is not necessary to distinguish between input andoutput technical inefficiencies as far as the effect on input demand and increase incost therefrom is concerned.
For the translog model, an analytical solution of ln xj is not possible. We can,however, compute the effects of OO technical and input allocative inefficiencies oninput demand numerically. To do so, first we solve for ln xj from the productionfunction and the FOCs in (37) and (38) using the estimated parameters and settingu ¼ 0 and xj ¼ 0 8 j. We label the solution as ln xo
j (e.g., point B0 in Fig. 2). Then wesolve the system again setting u ¼ 0 and xj ¼ xj, and label the solution as ln �xj (e.g.,point A0 in Fig. 2). Using these solutions of ln x, the impact of input allocativeinefficiency on xj is computed from ln �xj � ln x0
j for j ¼ 1; . . . J. Similarly, the effectof technical inefficiency on the demand for xj is nothing but Z, which can be obtainedfrom ln ~xj � ln x0
j , where ln ~xj is the solution of ln xj from (37) and (38) using theestimated parameters and setting u ¼ u and xj ¼ 0 8 j (e.g., point B in Fig. 2).14
5.2. Computing the cost of technical inefficiency and allocative inefficiency
Since both technical and input allocative inefficiencies increase cost, it is desirableto compute the increase in cost due to each of them.15 Such a cost difference can beobtained from the cost function with and without inefficiency. Since the costfunction has an analytical solution for the Cobb–Douglas model, it is possible to getanalytical solutions for the cost of technical inefficiency (ln cu) and the cost of inputallocative inefficiency ln cx. For this we write the cost function as
ln ca ¼ a0 þ1
rln yþ
1
r
XJ
j¼1
aj lnwj �1
rðv� uÞ þ E� ln r,
where a0 ¼ ln r�a0r�
1
r
XJ
j¼1
aj ln aj
!; and
E ¼1
r
XJ
j¼2
ajxj þ ln a1 þXJ
j¼2
aje�xj
" #� ln r, ð42Þ
where r is RTS. It is clear from the above cost function thatln caju � ln caju¼0 � Z ¼ u=r. Thus, for a given u, the over-use of inputs will besmaller if r41, ceteris paribus. Consequently, the cost will be lower with a higher r,ceteris paribus. Like the input demand functions in (41), the cost function in (42) hasfour parts: (i) the part not dependent on u, x, and v (often labeled as the neoclassicalcost function); (ii) the part dependent on x, which is E� ln rX0; (iii) the part
14An alternative procedure is to solve for Z from the equality f ðxe�ZÞev ¼ f ðxÞeðv�uÞ, which for the
translog function in (37) is u ¼ Z½P
jðaj þP
j ajk lnxk þ ajttÞ� � 1=2P
j
Pk ajkZ2 � gðx; t; ZÞ.
15Since an increase in cost due to IO and OO technical inefficiencies is the same, we are labeling it as the
cost of technical inefficiency.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440436
dependent on u (i.e., u=r); and (iv) the part dependent on v (i.e., �v=r). Thus, E� ln r
is the percent (when multiplied by 100) increase in cost due to input allocativeinefficiency. Similarly, u=r is the percent (when multiplied by 100) increase in costdue to technical inefficiency. An increase in cost due to technical and allocativeinefficiencies is inversely related to r.
For a translog production function the corresponding cost function cannot bederived analytically. Consequently, it is not possible to get analytical expressions forln cu and ln cx. We use numerical solutions of x with and without inefficiency tocompute ln cu and ln cx. That is, the percentage increase in cost due to technicalinefficiency, ctech, is16
ctech ¼ ðw0 ~xÞ=ðw0xoÞ � 1. (43)
Similarly, the percentage increase in cost due to input allocative inefficiency, callo, is17
callo ¼ ðw0 �xÞ=ðw0xoÞ � 1. (44)
The term w0xo, w0 ~x, and w0 �x correspond to the budget lines passing through B0, B,and A0 of Fig. 2, respectively.
5.3. Technical and systematic allocative inefficiency
Given that the electric utilities are subject to the rate of return regulation whichleads to a systematic over utilization of capital relative to any other input (theAverch–Johnson hypothesis), we now allow non-zero means for allocativeinefficiency (xj). The basic model is the same, except that n�MVNðq;SÞ. Thus, theonly change in the likelihood function will be in hðnÞ. The likelihood function cannow be concentrated with respect to both q and S, i.e.,
rj ¼ xj ¼1
N
Xi
xji; j ¼ 2; . . . ; J, (45)
and
sjk ¼1
N
Xi
ðxji � xjÞðxki � xkÞ; j; k ¼ 2; . . . ; J, (46)
where the subscript i ¼ 1; . . . ;N indicates the observation. Substituting theseexpressions for q and S into the log-likelihood function gives the concentratedlog-likelihood function that is maximized to obtain the remaining parameters of themodel.
Results from this model (reported in Tables 3 and 4) are similar to those of theprevious model. For example, RTS in the Cobb–Douglas model are found to be1.009 (not different from unity at any reasonable level of significance). Technical
16Note that in labeling ln cu as the percentage increase in cost due to technical inefficiency, we interpret
the log difference as the percentage change, whereas in ctech we compute the percentage change directly.
Thus, for small values of u both ln cu and ctech will be the same.17Again for small values of x both ln cx and callo will be the same.

ARTICLE IN PRESS
Table 4
Model statistics: with systematic errors in allocation
CD TL
mean (std. dev.) mean (std. dev.)
RTS 1.009 RTS 0.998
TC 0.023 TC 0.023
E(u) 0.313 (0.235) E(u) 0.316 (0.233)
xF�0.419 (0.504) xF
�0.257 (0.615)
xK�0.777 (0.508) xK
�2.210 (0.939)
Ctech Calloc Ctech Calloc
mean 0.406 0.070 mean 0.410 0.184
25% 0.152 0.029 25% 0.150 0.087
50% 0.273 0.050 50% 0.283 0.151
75% 0.502 0.090 75% 0.530 0.233
Ctech ¼ ðw0 ~xÞ=ðw0xoÞ � 1, Callo: ¼ ðw0 �xÞ=ðw0xoÞ � 1.
Table 3
Estimated production function parameters with systematic errors in allocation
CD TL
var. coef. (std. err.) var. coef. (std. err.) var. coef. (std. err.)
cons 5.319*** (0.121) cons 5.249*** (0.863)
l 0.252*** (0.016) l 0.164** (0.075) lf 0.027** (0.013)
f 0.569*** (0.025) f 0.543*** (0.120) lk 0.027** (0.011)
k 0.188*** (0.024) k 0.319** (0.130) lt 0.004*** (0.002)
t 0.023*** (0.002) t �0.004 (0.027) fk 0.013** (0.006)
ll �0.077*** (0.013) ft �0.001 (0.002)
ff �0.020 (0.013) kt 0.001* (0.0001)
s2u 0.160*** (0.012) kk �0.047** (0.020) s2u 0.162*** (0.012)
s2v 0.009*** (0.002) tt �0.001 (0.002) s2v 0.010*** (0.002)
log likelihood �916.344 log likelihood �819.023
Significance: ***: 1% level; **: 5% level; *: 10% level.
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 437
change is found to have taken place at the rate of 2.3% per year. Mean OO technicalinefficiency is found to be 31.3%. On average, the cost due to technical inefficiencyis increased by 40.6%, while allocative inefficiency increases cost (on average) by7%. The results for the translog model (at the mean of the data) come very closeto the Cobb–Douglas model (RTS ¼ 0:998, TC ¼ 2:3%, mean u ¼ 31:6%, meanCtech ¼ 41%, mean Callo ¼ 18:4%).
Compared to the result in Section 5.2, the estimates of input allocative inefficiencyare found to be negative and much larger in magnitude. However, these estimates arenot very precise. As discussed in the previous section, these negative allocative

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440438
inefficiency measures imply that capital is over-used related to fuel and labor. Theseresults indicate that more than 86% of the firms have over-used capital relative tolabor and fuel. This is true regardless of the choice of a Cobb–Douglas or translogfunctional form. Except for the cost of allocative inefficiency (Callo), which is higherin the current model with a systematic input allocative error, other results are similarto those from the previous model.
6. Conclusion
In this paper we have demonstrated how one can use a flexible functional form toestimate technical and allocative inefficiencies in a cost minimization framework.Instead of using the cost function and the associated cost share functions (which turnout to be difficult to estimate), we follow the primal approach used by Schmidt andLovell (1979) for the Cobb–Douglas production system. The primal system consistsof the translog production function and the associated FOCs of cost minimization.We consider both systematic and non-systematic allocative inefficiencies.
In formulating the model we have taken into account production uncertainty aswell as technical and allocative inefficiencies in a consistent and coherent manner.None of the error terms in the model are ad hoc. This is in contrast to the cost systemapproach in which (at least for the flexible functional form) the noise term(production uncertainty) is added prior to estimation (for both the cost function andcost share equations). This approach is quite ad hoc (lacks economic meaning) and iscriticized by McElroy (1987) and others. The main advantage of the primal approachused here is that every error term has a clear meaning and nothing is added at the endeither to simplify the derivation of some results or to make the estimation simpler.
Using the production system, we have derived observation-specific estimates oftechnical and allocative inefficiencies (for each pair of inputs). These estimates(together with the estimated parameters of the production system) have then beenused to obtain estimates of a cost increase (for each observation) due to technicaland allocative inefficiencies.
We have used panel data on U.S. steam-electric generating plants to estimate boththe Cobb–Douglas and translog production systems, with and without systematicinput allocative errors in the models. Results from the models without systematicinput allocative errors (based on both functional forms) show that, on average,technical inefficiency alone increased input demand and cost by about 39%. Inputallocative inefficiency led to an over-use of capital relative to both labor and fuel,which increased actual cost, on average, by 3.5% for the Cobb–Douglas model and5.0% for the translog model. When systematic input allocative errors are allowed,input demand and actual cost increased, on average, by 41% due to technicalinefficiency. On the other hand, input allocative inefficiency increased actual cost by7% (in the Cobb–Douglas model) and 18.4% (in the translog model).
It should be noted that these estimated inefficiency effect may to some extentreflect the excess capacity of the industry, which can be desirable for the electric

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440 439
utilities in order to meet peak demand. More would have to be known about the costof not having enough excess capacity to put the estimated effects in perspective.
Acknowledgements
The authors thank two referees and an associate editor for helpful comments.
References
Aigner, D.J., Lovell, C.A.K., Schmidt, P., 1977. Formulation and estimation of stochastic frontier
production function models. J. Econometrics 6, 21–37.
Atkinson, S.E., Primont, D., 2002. Stochastic estimation of firm technology, inefficiency, and productivity
growth using shadow cost and distance functions. J. Econometrics 108, 203–225.
Bauer, P.W., 1985. An analysis of multiproduct technology and efficiency using the joint cost function and
panel data: An application to the U.S. airline industry, Unpublished Ph.D. thesis, University of North
Carolina, Chapel Hill, NC.
Bauer, P.W., 1990. Recent developments in the econometric estimation of stochastic frontiers. J.
Econometrics 46, 39–56.
Christensen, L.R., Greene, W.H., 1976. Economies of scale in U.S. electric power generation. J. Political
Econ. 84, 655–676.
Christensen, L.R., Jorgenson, D.W., 1970. U.S. real product and real factor input, 1929–1967. Rev.
Income Wealth 16, 19–50.
Considine, T.J., 2000. Cost structures for fossil-fired electric power generation. The Energy J. 21, 83–104.
Fuss, M., McFadden, D., Mundlak, Y., 1978. A survey of functional forms in the economic analysis of
production. In: Fuss, M., McFadden, D. (Eds.), Production Economics: A Dual Approach to Theory
and Applications, vol. 2, North Holland, Amsterdam.
Greene, W.H., 1980. On the estimation of a flexible frontier production model. J. Econometrics 13,
101–115.
Hoch, I., 1958. Simultaneous equation bias in the context of the cobb-douglas production function.
Econometrica 26, 566–578.
Hoch, I., 1962. Estimation of production function parameters combining time-series and cross-section
data. Econometrica 30, 34–53.
Jondrow, J., Lovell, C.A.K., Materov, I.S., Schmidt, P., 1982. On the estimation of technical inefficiency
in the stochastic frontier production function model. J. Econometrics 19, 233–238.
Kumbhakar, S.C., 1997. Modeling allocative inefficiency in a translog cost function and cost share
equations: An exact relationship. J. Econometrics 76, 351–356.
Kumbhakar, S.C., Lovell, C.A.K., 2000. Stochastic Frontier Analysis. Cambridge University Press, New
York.
Kumbhakar, S.C., Tsionas, E.G., 2005a. Measuring technical and allocative inefficiency in the translog
cost system: a Bayesian approach. J. Econometrics 126, 355–384.
Kumbhakar, S.C., Tsionas, E.G., 2005b. The joint estimation of technical and allocative inefficiencies: an
application of Bayesian inference in non-linear random-effects models. J. Am. Stat. Assoc., to appear.
Meeusen, W., van den Broeck, J., 1977. Technical efficiency and dimension of the firm: some results on the
use of frontier production functions. Empirical Econ. 2, 109–122.
Melfi, C.A., 1984. Estimation and decomposition of productive efficiency in a panel data model: an
application to electric utilities, Unpublished Ph.D. thesis, University of North Carolina, Chapel Hill,
NC.
McElroy, M., 1987. Additive general error models for production, cost, and derived demand or share
system. J. Political Econ. 95, 738–757.

ARTICLE IN PRESS
S.C. Kumbhakar, H.-J. Wang / Journal of Econometrics 134 (2006) 419–440440
Mundlak, Y., Hoch, I., 1965. Consequences of alternative specifications in estimation of Cobb–Douglas
production functions. Econometrica 33, 814–828.
Rungsuriyawiboon, S., Stefanou, S., 2003. Stochastic estimation of efficiency and deregulation in the U.S.
electricity industry using dynamic efficiency model. Working Paper, Penn State University, State
College, PA.
Schmidt, P., Lovell, C.A.K., 1979. Estimating technical and allocative inefficiency relative to stochastic
production and cost frontiers. J. Econometrics 9, 343–366.
Schmidt, P., Lovell, C.A.K., 1980. Estimating stochastic production and cost frontiers when technical and
allocative inefficiency are correlated. J. Econometrics 13, 83–100.