Embed Size (px)
Citation preview

ARTICLE IN PRESS
0165-1684/$ - se
doi:10.1016/j.si
�Correspondfax: +334 76 8
E-mail add
jocelyn.chanuss
jerome.mars@l
Signal Processing 86 (2006) 3714–3731
www.elsevier.com/locate/sigpro
Estimation of polarization parameters using time–frequencyrepresentations and its application to waves separation
Antoine Roueffa, Jocelyn Chanussotb,�, Jerome I. Marsb
aInstitut Fresnel, Groupe Physique et Traitement de l’Image, DU Saint Jerome 13397 Marseille cedex 20, FrancebSignals and Images Laboratory, LIS, Grenoble, LIS/ENSIEG, Domaine Universitaire, BP 46, 38402 Saint-Martin-d’Heres Cedex, France
Received 20 September 2005; received in revised form 3 January 2006; accepted 8 March 2006
Available online 9 May 2006
Abstract
This paper deals with the detection of polarized seismic waves, the estimation of their polarization parameters, and the
use of these parameters to apply waves separation. The data, containing several polarized waves together with some noise,
are recorded by two-component sensors. After a review presenting the tools classically used to estimate the polarization
parameters of a wave in the time domain and in the time–frequency domain, respectively, we present a new methodology to
detect polarized waves, and estimate their polarization parameters automatically. The proposed method is based on the
segmentation of a time–frequency representation of the data. In addition, after describing the proposed polarization
estimation method, we present the oblique polarization filter (OPF) that enables the separation of two polarized waves
using their polarization parameters, even if the corresponding patterns partially overlap in the time–frequency plane. The
OPF consists in applying phase shifts, rotations, and amplifications in order to project one wave on one single component
and the other wave on the other component. Being more efficient than classical polarization estimation methods, our
approach greatly increases the separation performances of the OPF. Results are presented both on synthetic and real
seismic data.
r 2006 Elsevier B.V. All rights reserved.
Keywords: Time–frequency analysis; Polarization estimation; Waves separation; Singular value decomposition
1. Introduction
In the geophysical community, sensors recordingvibrations in several directions are more and morewidely used [1]. The main advantage provided bythese vectors (or multi-component) lies in the access
e front matter r 2006 Elsevier B.V. All rights reserved
gpro.2006.03.019
ing author. Tel.: +33 4 76 82 62 53;
2 63 84.
resses: [email protected] (A. Roueff),
[email protected] (J. Chanussot),
is.inpg.fr (J.I. Mars).
to polarization information they provide. Polariza-tion and related signal processing tools are veryuseful to differentiate and characterize polarizedwaves when traditional algorithms such as timefiltering, frequency filtering or time–frequencyfiltering fail (i.e. when the patterns correspondingto the different waves overlap in the time–frequencyplane) [2,3].
In particular, polarization can be used to separatepolarized seismic waves. It actually enables thecombination of the information provided by, e.g.,the vertical component with the information
.

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3715
provided by the horizontal one. In the sourceseparation community, some blind statistical meth-ods have been used to separate waves with a two-component sensor model [4,5]. However, thesemethods are designed for random processes andrequire specific statistical signal properties. Forexample, JADE algorithm [6] assumes that thedistributions are independent and non-Gaussian.Consequently, these methods often fail when deal-ing with deterministic non-stationary seismic waves.Furthermore, blind methods usually prevent the useof a priori information.
In practice, waves separation is traditionallyperformed using filtering algorithms: a transformis mapping the data in a domain where waves haveseparated supports is applied. Dealing with datarecorded by a sensor array, the classical transformsare the 2D Fourier transform [7] and the Radontransform [8]. When one wants to process each traceseparately, time–frequency filtering is another inter-esting alternative [9]. The main limitation of suchmethods is that the separation is only partial whenthe patterns of the different waves overlap in theconsidered domain. When vector data are available,these filtering procedures are usually applied oneeach component separately.
In the case of vector data, it is theoreticallypossible to perfectly separate two polarized waves,even if their pattern overlap, by using the obliquepolarization filter (OPF) [10]. However, this filterrequires a precise estimation of each wave’s
two componentsensor
50 100 150 200 250-0.3-0.2-0.1
00.10.20.3
50 100 150 200 250-1
-0.5
0
0.5
1
section II.A
section I
section I
Fig. 1. Separation of two polarized w
polarization parameters. Since the estimation ofthese parameters is a difficult task, the obliquepolarization filter is seldom used in practice. As aconsequence, the focus of this paper is on thiscrucial issue: the automatic estimation of thepolarization parameters and how they are used bythe oblique polarization filter to perform wavesseparation.
Nehorai et al. presented an important pioneeringwork on the modeling and statistical evaluation ofvector-sensor array processing [11]. In this paper,the description and the processing of the data forestimating the polarization parameters of seismicwaves from two-component sensors using time–frequency representations are addressed. The aim isto overcome the limitation of the OPF by providinga robust and reliable estimation and thus increase itsseparation performances. We show that combiningthe oblique polarization filter with the proposedpolarization parameter estimation algorithm allowsthe separation of two polarized waves, even whenthey partially overlap in the time–frequency plane.
The paper is organized as illustrated in Fig. 1.Section 2 covers the context of the study. It providesthe model used for two-component data (Section2.1) and presents the OPF (Section 2.2). Section 3presents the proposed polarization estimation algo-rithm. It consists in segmenting the time–frequencyplane in several regions (one for each wave). Thenthe polarization parameters are estimated in eachregion individually. Finally, Section 4 presents the
polarizationparameterestimation
50 100 150 200 250-0.3-0.2-0.1
00.10.20.3
50 100 150 200 250-0.5
0
0.5
1
Oblique
Filter (OPF)Polarization
II
I.B
section IV
aves. Organization of the paper.

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–37313716
application of the oblique polarization filterto waves separation, both on synthetic and realdata.
2. Context of the study
2.1. A model for polarized waves
Let shðtÞ and svðtÞ be the two row vectorscontaining the sampled signals recorded on a two-component single sensor (h stands for horizontaland v for vertical) in a time window. In presence ofone wave, we use the following model:
sahðtÞ
savðtÞ
" #¼
1
reiy
" #waðtÞ, (1)
where wðtÞ is the row vector containing the samplesof the polarized wave, and ðr; yÞ are the polarizationparameters of the wave wðtÞ. Note that sa denotesthe analytic signal of s [12]. A physical interpreta-tion of the polarization parameters of a moregeneral model is given by Anderson et al. [13].
Our model assumes that the signals recorded oneach component are identical, close to one phaseshift y and one amplification r. There is no temporal
20 40 60 80 100 120-1
-0.5
0
0.5
1
20 40 6-1
-0.5
0
0.5
1
time
-0.5 0 0.5-1
-0.5
0
0.5
1
-0.5-1
-0.5
0
0.5
1
sh(a) (b)
s s
Fig. 2. Example of three kinds of polarization: (a), (b), (c) Plots on the
solid line and vertical component svðtÞ in dashed line. Plots on the
polarization and (c) r ¼ 0.
delay since waves reach each component at the sametime. The use of analytic forms allows us to modelthe phase shift y as a simple multiplication by thecomplex exponential eiy. This model implies that thepolarization of the waves depends neither on timenor on frequency, which is fair when dealing withseismic waves.
In presence of Nw waves and a random whitenoise, the model becomes
sahðtÞ
savðtÞ
" #¼XNw
n¼1
1
rneiyn
" #wa
nðtÞ þnahðtÞ
navðtÞ
" #, (2)
where nhðtÞ and nvðtÞ are the row vectors containingthe noise on the h and the v components,respectively. In this paper, we consider that thisnoise is random and uncorrelated from onecomponent to the other.
Fig. 2 presents three examples of polarizationwhen only one wave is present:
(a)
0 8
time
0sh
top a
bott
corresponds to the most general case where ra0and ya0. Signals are not in phase: thepolarization is called elliptic.
(b)
corresponds to the linear case where ra0 andy ¼ 0. Signals are in phase.0 100 120 20 40 60 80 100 120-1
-0.5
0
0.5
1
time
0.5 -0.5 0 0.5-1
-0.5
0
0.5
1
sh(c)
s
re the time representations: horizontal component shðtÞ is in
om are Lissajous plots: (a) elliptic polarization, (b) linear

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3717
(c)
p
Fig.
arou
(the
corresponds to the case r ¼ 0. The wave isprojected on one single component.
The Lissajous plots t 7!ðshðtÞ; svðtÞÞ presented inFig. 2 (bottom) enable to visually characterize thepolarization.
2.2. The oblique polarization filter
The previous illustration in Fig. 2 shows thatleaving from the general case (ra0, ya0), it ispossible to project the wave on one single compo-nent (case r ¼ 0) by applying two simple operatorscompensating the phase shift and rotation para-meters. This operation can be written as follows:
cosðgÞ sinðgÞ
� sinðgÞ cosðgÞ
" #1 0
0 e�iy
� �sahðtÞ
savðtÞ
" #, (3)
where g ¼ arctanðrÞ.Similarly, in presence of two waves on the two
components, a perfect separation is possible byprojecting the first wave on one single com-ponent and the second wave on the other one.This operation can be done using the OPF proposedin [10]. To ensure a correct separation, this
-1 0 1-0.4-0.2
00.20.4
50 100 150 200 250-1
0
1
-0.5 0 0.5
-0.2
0
0.2
50 100 150 200 250-1
0
1
-1 0 1 2-0.5
0
0.5
50 100 150 200 250-1
0
1
amplificrotation
Lissajous sh, sv
phase sh
sh in solidand sv in dash
hase shift
3. Flow graph presenting the oblique polarization filter. Initially, th
nd time sample 60, and the second one is around sample 210 (first
re is one single wave on each component).
algorithm assumes that the model recalled in Eq.(1) holds for both waves and that the polarizationparameters of both waves are known. It does notrequire the waves to be separated in the time–frequency plane, or statistically independent, ornon-Gaussian.
In order to present the OPF, we consider a simpleexample where waves have separated supports forillustrative purpose. This is presented in Fig. 3.Initially, both waves are elliptically polarized (twoellipses are visible on the Lissajous plots). As shownin Fig. 3, the OPF is performed using a simplecombination of operators:
Step 1: A phase shift is applied on the secondcomponent. The polarization of the left wave turnslinear. Note that the ellipse of the second wave isalso changed because the whole signal is phaseshifted.
Step 2: A rotation is applied in order to projectthis wave on the first component.
Step 3: A phase shift is applied on the secondcomponent. The polarization of the right wave turnslinear.
Step 4: A second rotation is applied in order tohave the vertical axis as an axis of symmetry (in theLissajous plot).
-0.5 0 0.5-0.2
0
0.2
50 100 150 200 250-0.5
0
0.5
-0.5 0 0.5-0.2
0
0.2
50 100 150 200 250-0.5
0
0.5
-1 0 1-0.5
0
0.5
50 100 150 200 250-1
0
1
-1 0 1-0.4-0.2
00.20.40.6
50 100 150 200 250-1
0
1
ation rotation of π / 4
rotationift
e two waves have an elliptic polarization. The first wave is located
plot of Fig. 3). At the end, the two waves are perfectly separated

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–37313718
Step 5: An amplification leads to orthogonalwaves (in the Lissajous plot).
Step 6: A last rotation leads to the perfectseparation of the two waves (there is one singlewave on each component).
The details of the mathematical operationscorresponding to the different steps of the OPFare presented in Appendix A.
The key-point of this method is the requiredknowledge of the polarization parameters of eachwave. If the waves have different time supports(non-overlapping signals), these parameters caneasily be found by cross-correlation in the timewindow corresponding to each wave separately. Itcan also be estimated from the Lissajous plots.However, when the temporal support of the wavesare identical, one cannot estimate the polarizationparameters in this way and the oblique polarizationfilter cannot be used directly. To overcome thislimitation and increase the applicability of the OPF,we propose a new algorithm to detect polarizedwaves, and estimate their polarization parametersbased on time–frequency representations. This isdeveloped in the following section.
3. Detection of polarized waves and estimation of
their polarization parameters
3.1. Introduction
In this section, the classical tools used to estimatethe polarization in the time domain and in the time–frequency domain are reviewed first. Starting fromone example, we then propose an algorithm todetect polarized waves and estimate their polariza-tion parameters. It consists in segmenting the time–frequency plane in several regions (one for eachwave). The novelty in this partitioning process isthat it is not based on the energy of the waves as in[9]. This segmentation enables the detection of thedifferent polarized waves, and also the design, foreach wave, of an optimized time–frequency regionwhere the polarization can be estimated with a goodsignal-to-noise ratio (SNR).
3.2. Estimation in the time domain
3.2.1. Estimation using the cross-product
We address the estimation of the polarizationparameters r and y of a wave w recorded by a two-component sensor ðsh; svÞ. We assume that the wavew is corrupted by an additive noise n ¼ ðnh; nvÞ. This
corresponds to the following model:
sahðtÞ
savðtÞ
" #¼
1
reiy
" #waðtÞ þ
nahðtÞ
navðtÞ
" #. (4)
nh and nv are either uncorrelated, if it correspondsto a random noise of the model (Eq. (2)), orcorrelated if it includes other polarized wavespresent in the data.
The simplest method to perform the estimationconsists in finding a time window I where the wavew is dominant compared to the noise n, and incomputing the cross-product C defined by
C ¼
RI
savðtÞsa�h ðtÞdtR
IjsahðtÞj
2 dt, (5)
where * stands for the complex conjugate operator.This complex number leads to reiy when the noise
is negligible. However, if the energy of the noise nh
is bigger than the energy of w, or if the energy of nv
is bigger than the energy of rw, the estimation is notaccurate. In order to take this asymmetry intoaccount, the SNR is defined as the minimumbetween the SNR of each component:
SNR ¼ minEw
Enh
;r2Ew
Env
� �, (6)
where Ew (respectively Enh and Env ) is the energy ofthe signal w (respectively nh and nv).
This SNR will be used to quantify the robustnessof the polarization estimation in Section 3.5.
3.2.2. Estimation using the singular value
decomposition
Another polarization estimation method, studiedin [14], consists in estimating the singular valuedecomposition (SVD) [15] of the matrix defined asthe stacking of the two row vectors sahðtÞ and savðtÞ:
sahðtÞ
savðtÞ
" #¼ UDV�, (7)
where D is the diagonal matrix containing thesingular values l1, l2 in decreasing order, and U ¼
ðui;jÞ and V ¼ ðvi;jÞ contain the left and the rightsingular vectors, respectively.
Assuming that the energy of the wave is higherthan the energy of the noise, the polarizationparameters can be estimated from the followingratio:
uð2; 1Þ
uð1; 1Þ¼ reiy. (8)

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3719
In addition, the ratio between the first and thesecond singular value gives an evaluation of analternative SNR defined as
dSNR ¼l1l2
. (9)
When the data sh and sv contain random noise, thisratio is close to one, but when the data contain onlyone polarized wave, this ratio goes to infinity. dSNRcan be computed from sh and sv directly whereas theprevious SNR, as defined by Eq. (6) can only becomputed when w and r are known. As aconsequence, this second SNR can be used foradaptive filtering [16]. In this paper, we will use thissingular value ratio to detect polarized waves.
In addition, a second advantage of this SVDestimator lies in the symmetric role played by sh andsv.
3.3. Extension of the classical methods in the
time– frequency plane
3.3.1. Estimation using the cross-spectrogram
In this section, we study the possible time–frequency extensions of the classical methods. Inthe fifth chapter of Keilis-Borok’s book [17],formula (5) is generalized as follows:
Cðt; nÞ ¼
RIt;n
TFRvðt; f ÞTFR�hðt; f Þdt dfRI t;njTFRhðt; f Þj2 dtdf
, (10)
where TFRh and TFRv are the linear time–frequency representations of sh and sv, respectively,and I t;n is a time–frequency region of fixed dimen-sion and centered on the time–frequency locationðt; nÞ.
When using the wavelet transform, one shouldadapt the size of the region I t;n to the scale. In thispaper, we only used the short-time Fourier trans-form for the sake of simplicity. In addition, we useda Gaussian window.
In a similar way as with Eq. (5), in the case of ahigh SNR (meaning that the energy of the noise isnegligible compared to the energy of the signalwithin the time–frequency area defined by I t;n), thisresults in an estimation of r and y:
Cðt; nÞ ¼ reiy. (11)
In [18], the time–frequency region I t;n is chosen asthe singleton ft; ng, ensuring a good time–frequencyresolution. In this case, Eq. (10) turns to a simplecross-spectrogram (or cross scalogram, depending
on whether the TFR is the Short Term FourierTransform (STFT) or the continuous wavelettransform (CWT)):
Cðt; nÞ ¼TFRvðt; nÞTFR�hðt; nÞ�þ jTFRhðt; nÞj2
, (12)
where � is a constant aiming at avoiding nulldenominators.
3.3.2. Estimation using the singular value
decomposition
As proposed in [19], the extension of the SVDmethod to the time–frequency plane can be achievedby computing, for each time–frequency locationðt; nÞ, the SVD on the matrix formed by the twovectors TFRhðt; nÞ and TFRvðt; nÞ, where t variesfrom t� nbs to tþ nbs (nbs is a constant definingthe number of considered samples). The matrix isthus of dimension 2 by nbs � 2þ 1. Here, thedimensions of the time–frequency region I t;n arecharacterized by the bandwidth of the window usedin the STFT and the number of samples 2 � nbsþ 1.
As in the time domain, an estimation of the SNRis given by the ratio between the two singular valuesat each time–frequency location, in addition to theestimation of the complex number reiy. This time–frequency representation enables some interpreta-tion of the data, but it is usually not used to estimatethe polarization parameters.
3.4. Proposed detection and estimation method
3.4.1. Introduction
In this paper, we propose to use the previoustime–frequency representation generated using theSVD in order
�
to detect polarized waves, � to design a time–frequency region for eachdetected wave, enabling an accurate estimationof the polarization parameters.An example is presented in Fig. 4. The syntheticdata correspond to the sum of two waves: oneRicker wave and one Morlet wave, together withsome Gaussian white noise. The time–frequencypatterns of the two waves overlap. The theoreticalSNR (see Eq. (6)) between the Ricker wave and therandom noise is 3.4 dB, and 6 dB between theMorlet wavelet and the random noise.
The polarization parameters of the Ricker waveare: y ¼ 1:57 and r ¼ 1:3, and y ¼ �0:5 and r ¼ 1

ARTICLE IN PRESS
10 20 30 40 50 60-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
10 20 30 40 50 60-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
time time
freq
uenc
y
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
freq
uenc
y
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
time time
freq
uenc
y
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
2
4
6
8
10
12
14
16
18
20
22
freq
uenc
y
10 20 30 40 50 60
0.5
0.4
0.3
0.2
0.1
0 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time time
(a)
(c)
(e) (f)
(d)
(b)
Fig. 4. Representations of a two component synthetic signal, which is the sum of a Ricker wave and a Morlet wave, together with some
Gaussian white noise. (f) Presents the result of the automatic detection of polarized waves. Each detected wave is represented by a contour
and the polarization parameters are represented by the corresponding ellipses. (a) shðtÞ. (b) svðtÞ. (c) Spectrogram of sh. (d) Spectrogram of
sv. (e) Image of the ratio l1=l2 and (f) Result of the detection algorithm.
A. Roueff et al. / Signal Processing 86 (2006) 3714–37313720
for the Morlet wave. For this example, thebandwidth of the Gaussian window is 0:1Hz, andnbs ¼ 10 samples. The white areas on the left and on
the right of Fig. 4(e) are due to side effects. For thespectrogram images, the frequency axis correspondsto the normalized frequency.

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3721
When one of the waves is dominant compared tothe other wave and the random noise, the singularvalue ratio is significantly bigger than one (see Fig.4(e)). On the contrary, in the regions where therandom noise is dominant, this ratio is close to one.Finally, when the two waves overlap, this ratio isalso fairly low, even though the energy present atthe corresponding locations is important.
Another interesting property of the image pre-sented in Fig. 4(e) is that each polarized wave can beassociated to a dome. As a consequence, we proposeto automatically detect the presence of polarizedwaves by studying this ratio image. The segmenta-tion of this image should provide one time–frequency region for each wave where the corre-sponding polarization can be estimated. Thisprocess is described in the flow graph of Fig. 5and explained in the next paragraph. When thepolarized waves have been detected and theirrespective polarization parameters estimated, wepresent as a result a time–frequency image where the
10 20 30 40 50 60-1
-0.8-0.6-0.4-0.2
00.20.40.60.8
10 20 30 40 50 60-1
-0.8-0.6-0.4-0.2
00.20.40.60.8
1
watershedsegmentation
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
10 20 30
0.5
0.4
0.3
0.2
0.1
0
10
0.5
0.4
0.3
0.2
0.1
0
computation ofthe ratio image m
step 1
step 2
step 3 s
Fig. 5. Flow graph presenting the polarization estim
contours of each detected wave are shown. Thepolarization parameters are represented by thecorresponding ellipse inside each contour. Thisprovides a complete visual interpretation of thedata. An example is presented in Fig. 4(f).
3.4.2. Segmentation of the time– frequency plane
In order to design a region for each wave wherethe estimation of the polarization can be achievedaccurately, we first need to separate the differentwaves. Since these regions correspond to differentdomes in the ratio image, we apply the segmentationtool called the watershed algorithm [20]. Thissegmentation consists in grouping all pixels con-nected to the same local maximum. The algorithmprovides one region for each local maximum of theimage.
After this segmentation, all the different domesare separated. However, to decide whether eachdome should be associated to a polarized wave ornot, we apply a threshold on the singular value ratio
time frequencyfiltering
same process for all regionsas long as the local maximumis bigger than the threshold
step 6
10 20 30 40 50 60-0.4-0.3-0.2-0.1
00.10.20.30.4
10 20 30 40 50 60-0.4-0.3-0.2-0.1
00.10.20.30.4
40 50 60
20 4030 50 60
ρ, θ estimation of one wave
aximum is the biggest
step 4
step 5
election of the region whose local
ation method. See Section 3.4.2 for the details.

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–37313722
of each local maximum. The estimation of thisthreshold is described in the next paragraph. Thenumber of remaining regions corresponds to thenumber of detected polarized waves. Note on theexample presented in Fig. 5, that local maxima thatare below the chosen threshold are not consideredas representing a polarized wave and are thereforenot selected by the algorithm.
At this step, we have one region for each wave.Now, in order to have a robust estimation,information actually related to the polarized waveis separated from the information related to thenoise in each segmented region using a secondthreshold. The setting of this threshold is alsodetailed in the next paragraph. This second step inthe segmentation process leads to the contour imageof Fig. 5.
Finally, the polarization parameters of each waveare estimated in the corresponding time–frequencyarea (see Fig. 5, steps 4 and 5). The denoisingprocess is performed by the classical time–frequencyfiltering [21] in the region defined by the segmenta-tion (see Fig. 5 step 4). The output SNR increases,assessing the accuracy of the estimation based onthe SVD method. The same procedure is applied oneach segmented region, to estimate the polarizationof each detected wave.
3.4.3. Setting of the thresholds
In this paragraph, we detail the setting of the twothresholds applied in the segmentation algorithmpreviously described. The first threshold, applied onthe local maxima of the ratio image, enables the
cum
ulat
ed p
df (
%)
0 5 10 15 20 250
10
20
30
40
50
60
70
80
9099
100
nbs = 6, B = 0.1 Hz
nbs = 10, B = 0.1 Hz
nbs = 20, B = 0.1 Hz
singular value ratio (dB)(a) (
Fig. 6. Cumulated probability density functions of the singular value ra
are considered, on (b) only locations corresponding to local maxima a
selection of the most significant domes, i.e. thedetection of the polarized waves. In each segmentedregion, the second threshold allows the separationof the wave from the random noise. The optimalsetting of these thresholds could be derived from theprobability density function (pdf) of the singularvalue ratio in presence of a polarized wave, and thepdf of the singular value ratio in presence ofuncorrelated noise by minimizing the falsealarm probability and maximizing the detectionprobability. Unfortunately, the pdf of thesingular value ratio in presence of a polarized waveremains unknown and cannot be estimated. As aconsequence, we simply estimate the pdf of thesingular value ratio in presence of noise usingsimulations, and we estimate the upper boundensuring a probability of having some noise smallerthan 1%, thus minimizing the false alarm prob-ability.
The simulations are done by generating uncorre-lated white noise on both components one thousandtimes. No signal is present. Note that when the noisehas the same variance on both component, itsamplitude has no impact on the singular value ratio.Fig. 6 presents the estimated cumulated pdfs of thecorresponding singular value ratio. On the left, weconsider all locations in the time–frequency images,whereas on the right we only consider locationscorresponding to local maxima. In addition, in bothcases, we consider different sizes of time–frequencyregion I t;n. Actually, the choice of I t;n is animportant parameter: the bigger I t;n is, the whiterthe noise is.
cum
ulat
ed p
df (
%)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
80
9099
100
nbs = 6, B = 0.1 Hz
nbs = 10, B = 0.1 Hz
nbs = 20, B = 0.1 Hz
singular value ratio at the local maxima (dB)b)
tio in presence of white noise. On (a) all time–frequency location
re considered.

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3723
From the first Fig. 6 (left), the first threshold is setsuch that the false alarm probability remains below1% (i.e. the probability of considering the noise as apolarized wave). For example, for a window with a0.1Hz bandwidth and nbs ¼ 10, if, for one givenpixel of Fig. 4(e), the singular value ratio is biggerthan the threshold value set to 16 dB, the prob-ability of actually being in presence of noise issmaller than 1%. Similarly, the second threshold isset from the second Fig. 6 (right), where the curvesare plot by only considering time–frequency loca-tions corresponding to local maxima.
As a conclusion, the proposed method leads to atime–frequency representation where the contoursassociated to the different waves are plot with theirassociated polarization parameters. The detection ofthe waves and the estimation of the correspondingpolarization are done automatically. Only twoparameters should be set, namely the bandwidthof the window and nbs (the length of the vectorwhich is used to compute the SVD). In order to setthese parameters, a time–frequency region is de-signed such that for each wave, one can find alocation ðt; nÞ with a good SNR. For the examplepresented in Fig. 4, we chose a bandwidth of 0.1Hzand nbs ¼ 10 samples.
3.5. Quantitative evaluation of the results on the
synthetic data set
In the previous paragraph, the proposed detec-tion and estimation algorithm has been presented.To assess the robustness of the proposed polariza-
sing
ular
val
ue r
atio
(dB
)
-10 -5 0 5 100
5
10
15
20
25
30
35
40
45
50T = 6, B = 0.1 Hz
T = 10, B = 0.1 Hz
T = 20, B = 0.1 Hz
signal to noise ratio (dB)(a)
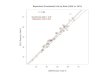
Fig. 7. Influence of the signal-to-noise ratio on (a) the singul
tion estimation method, different powers of noiseare considered. For this simulation, some whitenoise with varying energy is added to the Rickerwave previously presented. The different resultsobtained from this analysis are plotted in Fig. 7.The SNR is computed as described in Eq. (6). Thepolarization estimation error is given by themodulus of the difference between the actual reiy
and the resulting estimation.From the singular value ratio plots, we observe
that the choice of T and B has a major impact onthe singular value ratio, especially when the SNR isgreater than 2 dB. However, from the polarizationestimation error plots, we observe that the estima-tion results are close when the SNR is greater than2 dB: there is no dependence on the chosen time–frequency region. This means that the used thresh-old based on the singular value ratio will bedifferent each time one change T or B, whereasthe estimation error may not be changed.
In the next section, the proposed estimationmethod is used together with the oblique polariza-tion filter to perform waves separation. The wholeseparation process is tested on the previouslydescribed synthetic data set, and also to some realdata sets.
4. Results of the oblique polarization filter
4.1. Application on the synthetic data set
To illustrate the algorithm, we apply the OPF tothe previously described example with two synthetic
pola
riza
tion
estim
atio
n er
ror
(dB
)
-10 -5 0 5 10-20
-15
-10
-5
0
5
10
T = 6, B = 0.1 Hz
T = 10, B = 0.1 Hz
T = 20, B = 0.1 Hz
signal to noise ratio (dB)(b)
ar value ratio and (b) the polarization estimation error.

ARTICLE IN PRESS
10 20 30 40 50 60-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
10 20 30 40 50 60-1.5
-1
-0.5
0
0.5
1
1.5
2
time time
freq
uenc
y
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
freq
uenc
y
10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
time time
(a)
(c) (d)
(b)
Fig. 8. Output of the OPF for the example of Fig. 4: (a) output 1: s1, (b) output 2: s2, (c) spectrogram of s1 and (d) spectrogram of s2.
A. Roueff et al. / Signal Processing 86 (2006) 3714–37313724
waves. Fig. 4(f) shows that the two waves have beencorrectly detected, with no false alarm, and theirpolarization parameters have been estimated. Usingthese parameters, the OPF is applied. The outputsignals (noted s1 and s2) are presented in Fig. 8: thetwo waves are correctly separated. Note that thefilter did not remove the random noise, because it isnot polarized. However, since it is negligible, it didnot prevent the algorithm from separating the twowaves.
It is clear on this example that a separation by aclassical time–frequency filtering of each componentseparately could not have performed such a resultsince the patterns of the different waves overlap inthe time–frequency plane.
4.2. Application on real data
The first considered data set was recorded by theLaboratoire de Geophysique Interne et Tectono-physique (LGIT). It was obtained from an explosive
source and a line of 47 receivers (two componentsgeophones). The distance between two geophones is10m. The horizontal component is a horizontalgeophone which vibration axis is in the plane goingthrough the source point and the seismic line (inline). The second component is a geophone with avertical axis. The offset between the source and thefirst receiver is 50m. Data are sampled every 16msand the recording’s duration is limited to 4 s. Fig. 9shows the initial data recorded on the horizontal(left) and the vertical (right) component,respectively. On this recording, we can notice arefracted wave, a reflected arrival, and two dis-persive Rayleigh waves characterized by lowerapparent velocities and by low frequency contents,especially on the h component. The slower Rayleighwave will be called the slow Rayleigh wave, and thefaster one wave will be called the fast Rayleighwave.
The two initial profiles are presented in Fig. 9(a)and (b), respectively. We focus on the 47th traces

ARTICLE IN PRESSdi
stan
ce
0
-5
-10
-15
-20
-25
-30
-35
-40
-45
0 50 100 150 200 250
dist
ance
0
-5
-10
-15
-20
-25
-30
-35
-40
-45
0 50 100 150 200 250
time time
dist
ance
0
-5
-10
-15
-20
-25
-30
-35
-40
-45
0 50 100 150 200 250
dist
ance
0
-5
-10
-15
-20
-25
-30
-35
-40
-45
0 50 100 150 200 250time time
(a) (b)
(c) (d)
Fig. 9. Illustration of the algorithm on a real Seismic profile. (a) and (b) Initial profiles recorded by the two-component sensor. (c) and (d)
After the OPF. At the output, the slow Rayleigh wave is projected on output 1, and the fast Rayleigh wave is projected on output 2. The
detection of polarized waves and the estimation of polarization parameters is performed on the last trace (see Fig. 10).
A. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3725
(the last ones) noted sh and sv. The spectrograms ofsh and sv are presented in Fig. 10(a) and (b),respectively. On these images, the different wavesare visible. On the contour image presented in Fig.10(d), the two Rayleigh waves are detected. Thereflected and refracted waves are mixed in oneregion. From the polarization ellipse, one can seethat these waves are mainly present on the verticalcomponent. In addition of these waves, severalother waves are also detected, but they are lessenergetic.
We decide to separate the slow Rayleigh wavefrom the fast one. The result is plot in Fig. 10. Theslow Rayleigh wave has been efficiently projected onthe first component, but the fast Rayleigh wave hasbeen separated in two parts. This means that the
signal contain one (or more) other wave(s) in thistime–frequency area.
Assuming that the polarization parameters areconstant over the whole profile (which is fair ingeophysical prospecting), the estimation obtainedfrom the last trace is used for all the traces of theprofile. The same oblique polarization filter is thusapplied to each trace. The resulting profiles arepresented in Fig. 9(c) and (d). The slow Rayleighwave has been efficiently projected on one compo-nent, and the fast one has been separated in twoparts.
The second data set is a marine seismic campaignrecorded by the Compagnie Generale de Geophy-sique (CGG). The sensor array was laid on the seafloor (14m deep) and each receiver recorded two

ARTICLE IN PRESSfr
eque
ncy
50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
-4
-3
-2
-1
0
1
2
3
4
5
6
x 105
freq
uenc
y
50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
-2
-1
0
1
2
3
x 105
time time
freq
uenc
y
50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
5
10
15
20fr
eque
ncy
freq
uenc
y
50 100 150 200 250
0.5
0.4
0.3
0.2
0.1
0 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time time
freq
uenc
y
50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
1
2
3
4
5
6
7
x 105
50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
1
2
3
4
5
6
7
8
9
10
11x 105
time time
(a) (b)
(c) (d)
(e) (f)
Fig. 10. Illustration of the algorithm on the 47th trace of the profile from Fig. 9. (a) and (b) Input spectrograms. (c) Ratio image giving
some hints on the presence of polarized waves. (d) Detected waves and corresponding polarization ellipses. Choosing to separate the slow
Rayleigh wave (around sample 180) from the fast Rayleigh wave (around sample 100), corresponding contours are selected. The
spectrograms of the output separated waves are presented on (e) (slow Rayleigh wave on s1) and (f) (fast Rayleigh wave on s2).
A. Roueff et al. / Signal Processing 86 (2006) 3714–37313726

ARTICLE IN PRESSdi
stan
ce
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
0 20 40 60 80 100 120
dist
ance
0 20 40 60 80 100 120
time time
dist
ance
0 20 40 60 80 100 120
dist
ance
0 20 40 60 80 100 120
time time
(a)
(c) (d)
(b)
Fig. 11. Illustration of the algorithm on a second real seismic profile. (a) and (b) Initial profiles. (c) and (d) After the OPF. The detection
of polarized waves and the estimation of polarization parameters is done on the 10th trace (see Fig. 12).
A. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3727
components. The maximum offset between thesource and the receivers is 900m, time sampling is2ms with a listening time of 1 s. The spatialsampling is 50m.
The two initial profiles are presented in Fig. 11(a)and (b), respectively. We focus on the 10th traces,noted sh and sv. The spectrograms of sh and sv arepresented in Fig. 12(a) and (b), respectively.These images present an energetic pattern in thecenter of the image (around coordinates ð50; 0:15Þ).In addition, in the spectrogram of sv, anotherpattern is visible on the right (around coordinates(110,0.08)).
It is hard to drive some precise interpretationsfrom the spectrogram images only. On the contrary,looking at the contour image (see Fig. 12(d)),several regions are found with the same polarization
ellipse, but on the right part of the image, anotherinteresting region with a significantly differentpolarization has been detected. Thus, the contourimage enable us to confirm the presence of adifferent wave on the right. We decide to separatethese two waves. After the OPF, the two waves(whose spectrograms are presented in Fig. 12(e) and(f), respectively) are separated.
Again, assuming the polarization parameters areconstant over the whole profile, the estimationobtained from one trace is used on all the traces andthe same oblique polarization filter is applied toeach trace. Resulting profiles are presented in Fig.11(c) and (d): the energetic wave is projected on thefirst component, while the second wave is projectedon the second one. This processing allows us toreveal the presence of a weak wave (on the right)

ARTICLE IN PRESS
20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
freq
uenc
yfr
eque
ncy
freq
uenc
y
20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
time time
20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
5
10
15
20
25
30
35
40
45
50
20 40 60 80 100 120
0.5
0.4
0.3
0.2
0.1
0 0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time time
freq
uenc
yfr
eque
ncy
freq
uenc
y
20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
time time
(a) (b)
(d)(c)
(e) (f)
Fig. 12. Illustration of the algorithm on the 10th trace of the initial profile from Fig. 11. (a) and (b) Initial spectrograms. (c) Ratio image
giving some hints on the presence of polarized waves. (d) Detected waves and corresponding polarization ellipses. Choosing to separate the
energetic wave (around sample 40) from the ‘‘small’’ wave (around sample 110), corresponding contours are selected. The spectrograms of
the output separated waves are presented on (e) (energetic wave) and (f) (‘‘small’’ wave).
A. Roueff et al. / Signal Processing 86 (2006) 3714–37313728

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3729
that was not visible before. This has been validatedby geophysicists.
Obtaining similar result using standard methodssuch as 2D Fourier transform would be impossiblesince the patterns of the different waves overlap inthe frequency images: the two waves have the samefrequency and the same velocity. In addition, theamplitude difference between the two waves tendsto hide the ‘‘small’’ wave on the right in the time-distance images presented in Fig. 11(c) and (d). As aconclusion, the proposed polarization methodprovided complementary information to spectro-gram images, enabling the detection and separationof different waves.
5. Conclusion
In the general frame of waves separation,polarization can be a discriminant parameter whentraditional methods fail (for instance when thedifferent waves have overlapping time–frequencysupports). Two-component sensors record vibra-tions in two orthogonal directions and actuallyprovide an access to a polarimetric characterizationof the signals, assuming the vector nature of thedata is correctly handled.
In this paper, we presented an algorithm thatautomatically detects the polarized waves andestimates the corresponding polarization para-meters. This is achieved by the watershed segmenta-tion of one time–frequency representation of thepolarization information (namely the singular va-lues ratio image). The setting of the segmentationparameters is derived from statistical simulationsand keeps the false alarm rate below 1%. In asecond step, the estimated polarization parametersare used to actually separate the waves using theoblique polarization filter. The proposed algorithmassumes that the polarization of one given wave isconstant over the time–frequency plane. It alsoassumes that for each wave, there exists one time–frequency region where the wave is dominantcompared to the other waves and to the noise.
Compared with classical approaches operating oneach component separately, we improved the separa-tion performances since the proposed algorithm isable to separate two waves whose time–frequencysupports overlap. When more than two waves arepresent, the proposed algorithm needs to be applied incombination with other time/frequency/time–fre-quency filtering techniques. But when three or morewaves actually overlap at the same time–frequency
location, none of the existing methods will be able toperform a correct separation.
We brought in this paper a methodology toconstruct time–frequency images describing two-component data. The generalization of the methodto n-component data is trivial by using the SVDmethod. It only requires to model the Lissajous plotswith a third parameter (spherical parametrization). Inaddition, as a prolongation of this work, one may tryto adapt this study to the more complex case wherethe polarization depends on frequency. In particular,this requires the estimation of the dispersion from onecomponent to the other as in [22].
Appendix A. Stepwise description of the oblique
polarization filter
We detail in this Appendix the different mathe-matical steps involved in the oblique polarizationfilter leading to the perfect separation of two waveswith known polarization parameters.
Two polarized waves, w1 and w2, are considered,with known polarization parameters: reiy and leic,respectively. This corresponds to the followingsituation:
sahðtÞ
savðtÞ
" #¼
1
reiy
" #wa1ðtÞ þ
1
leic
� �wa2ðtÞ. (13)
A.1. Step 1: Phase shift
The first phase shift corresponds to the multi-plication by the following matrix:
M1 ¼1 0
0 e�iy
� �which leads to
sahðtÞ
savðtÞ
" #¼
1
r
" #wa1ðtÞ þ
1
leic1
� �wa2ðtÞ, (14)
where c1 ¼ c� y.
A.2. Step 2: Rotation
The first rotation corresponds to the followingmatrix:
M2 ¼cosðgÞ sinðgÞ
� sinðgÞ cosðgÞ
" #

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–37313730
where g ¼ arctanðrÞ. This leads to
sahðtÞ
savðtÞ
" #¼
r20
� �wa1ðtÞ þ
l2eic2
l3eic3
" #wa2ðtÞ, (15)
where r2 ¼ cosðgÞ þ r sinðgÞ, l2eic2 ¼ cosðgÞ þ lsinðgÞeic1 , and l3eic3 ¼ � sinðgÞ þ l cosðgÞeic1 .
A.3. Step 3: Phase shift
The second phase shift corresponds to the multi-plication by the following matrix:
M3 ¼1 0
0 eiðc2�c3Þ
� �.
This leads to
sahðtÞ
savðtÞ
" #¼
r20
� �wa1ðtÞ þ
l2eic2
l3eic2
" #wa2ðtÞ. (16)
A.4. Step 4: Rotation
The second rotation corresponds to the followingmatrix:
M4 ¼cosðg2Þ sinðg2Þ
� sinðg2Þ cosðg2Þ
" #,
where g2 ¼12arctanðl3=l2Þ.
This leads after a tedious but direct calculus to
sahðtÞ
savðtÞ
" #¼
cosðg2Þr2
� sinðg2Þr2
" #wa1ðtÞ
þl3eic2=ð2 sinðg2ÞÞ
l3eic2=ð2 cosðg2ÞÞ
" #wa2ðtÞ. ð17Þ
A.5. Step 5: Amplification
The amplification corresponds to the followingmatrix:
M5 ¼tanðg2Þ 0
0 1
� �
This leads to
sahðtÞ
savðtÞ
" #¼
sinðg2Þr2
� sinðg2Þr2
" #wa1ðtÞ
þl3eic2=ð2 cosðg2ÞÞ
l3eic2=ð2 cosðg2ÞÞ
" #wa2ðtÞ. ð18Þ
A.6. Step 6: Rotation
The final rotation corresponds to the followingmatrix:
M6 ¼1 �1
1 1
� �This leads to
sahðtÞ
savðtÞ
" #¼
2 sinðg2Þr2
0
" #wa1ðtÞ
þ0
l3eic2=ðcosðg2ÞÞ
" #wa2ðtÞ, ð19Þ
where the two waves are perfectly separated (w1 ison the h component, while w2 is on the v
component).
References
[1] R.E. Sheriff, Reservoir Geophysics, third ed., Society of
Exploration Geophysicists (SEG), 1997.
[2] J.L. Mari, F. Glangeaud, F. Coppens, Signal Processing for
Geologists and Geophysicists, Ed Technip, Paris, 1999.
[3] B. Leprettre, N. Martin, F. Glangeaud, J.P. Navarre, Three-
component signal recognition using time, time–frequency,
and polarization information-application to seismic detec-
tion of avalanches, IEEE Trans. Signal Process. 46 (1) (1998)
83–102.
[4] J.L. Lacoume, F. Glangeaud, J. Mars, Blind separation of
polarized waves, in: Ninth European Signal Processing
Conference (EUSIPCO’98), Greece, 1998, pp. 1629–1632.
[5] N. Le Bihan, J. Mars, Blind wave separation using vector-
sensors, in: IEEE International Conference on Acoustics
Speech and Signal Processing (ICASSP’00), Istanbul,
Turkey, vol. 4, 2000, pp. 2314–2317.
[6] J.-F. Cardoso, A. Souloumiac, Blind beamforming for non
Gaussian signals, IEE Proc.-F 140 (6) (1993) 362–370.
[7] O. Yilmaz, Seismic Data Processing, Society of Exploration
Geophysicists (SEG), 1987.
[8] M. Dietrich, Modeling of marine seismic profiles in the t� x
and t� p domains, Geophysics 53 (4) (1988) 453–465.
[9] A. Roueff, J. Chanussot, J.I. Mars, M.-Q. Nguyen,
Unsupervised separation of seismic waves using the

ARTICLE IN PRESSA. Roueff et al. / Signal Processing 86 (2006) 3714–3731 3731
watershed algorithm on time-scale images, Geophys. Pro-
spect. 52 (2004) 287–300.
[10] J. Mars, F. Glangeaud, J.M. Vanpe, J.L. Boelle, Wave
separation by an oblique polarization filter, in: Physics
in Signal and Image Processing, Paris (PSIP’99), 1999,
pp. 94–100.
[11] A. Nehorai, E. Paldi, Vector-sensor array processing for
electromagnetic source localisation, IEEE Trans. Signal
Process. 42 (2) (1994) 376–398.
[12] L. Cohen, Time-Frequency Analysis, Prentice-Hall, Engle-
wood Cliffs, NJ, 1995.
[13] S. Anderson, A. Nehorai, Analysis of a polarized seismic
wave model, IEEE Trans. Signal Process. 44 (2) (1996)
281–284.
[14] G.M. Jackson, I.M. Mason, S.A. Greenhalgh, Principal
component transforms of triaxial recordings by singular
value decomposition, Geophysics 56 (4) (1991) 528–533.
[15] V.C. Klema, A.J. Laub, The singular value decomposi-
tionCC its computation and some applications, IEEE Trans.
Autom. Control 25 (2) (1980) 164–176.
[16] J.C. Samson, J.V. Olson, Data-adaptive polarization filters
for multichannel geophysical data, Geophysics 46 (10)
(1981) 1423–1431.
[17] V.I. Keilis-Borok, Seismic Surface Waves in a Laterally
Inhomogeneous Earth, Kluwer Academic Publishers, Dor-
drecht, 1989.
[18] A. Roueff, J. Chanussot, J.I. Mars, Estimation of polariza-
tion on time-scale plane for seismic wave separation, in: 11th
European Signal Processing Conference (EUSIPCO’02),
Toulouse, France, vol. 1, 2002, pp. 29–32.
[19] H. Paulssen, A.L. Levshin, A.V. Lander, R. Snieder, Time-
and frequency-dependent polarization analysis: anomalous
surface wave observation in Iberia, Geophys. J. Int. 103
(1990) 483–496.
[20] L. Vincent, P. Soille, Watersheds in digital spaces: an
efficient algorithm based on immersion simulation, IEEE
Trans. PAMI 13 (6) (1991) 583–598.
[21] W. Kozek, F. Hlawatsch, A comparative study of linear and
nonlinear time–frequency filters, Proceedings of the IEEE-
SP International Symposium, 1992, pp. 163–166.
[22] A. Roueff, H. Pedersen, J.I. Mars, J. Chanussot, Simulta-
neous group and phase correction for the estimation of
dispersive propagating waves in the time–frequency plane,
in: International Conference on Acoustic Speech and
Signal Processing, ICASSP’03, Hong Kong, vol. 3, 2003,
pp. 429–432.