Embed Size (px)
Citation preview

JOURNAL OF MATHEMATICAL ANALYSIS AND APPLICATIONS 141, 58@602 (1989)
Estimation of Nonlinearities in Parabolic Models for Growth, Predation, and Dispersal of Populations*
H. T. BANKS’
Center for Control Sciences Division of Applied Mathematics, Brown University, Providence. Rhode Island 02912
AND
K. A. MURPHY:
Department of Mathematics, University of North Carolina, Chapel Hill, North Carolina 27599
A convergence theory is given for approximation techniques to treat inverse problems involving systems of nonlinear parabolic partial differential equations. These techniques can be used to estimate density-dependent dispersal coefficients in population models, as well as nonlinear growth and predation terms. Numerical experiences with the resulting algorithms on both conventional (scalar) and vector computers are reported along with an indication of performance of the methods with field data from prey-predator experiments. b 1989 Academic Press, Inc.
1. INTRODUCTION
The purpose of this paper is to give the mathematical and computational foundations for techniques we have developed to use with inverse problems involving nonlinear density-dependent dispersal, growth, and predation in population models. These models entail nonlinear parabolic systems of partial differential equations and are playing an increasingly important role in studies by population biologists and ecologists [ll, 14, 151. As we shall explain briefly in the context of one of the numerical examples presented in Section 4, we have already successfully used the techniques investigated in
* Part of this research was carried out while the authors were visiting scientists at ICASE, NASA Langley Research Center, Hampton, VA, which is operated under NASA Contracts NASl-17070 and NASI-18107.
+ This research was supported in part under Grants NSF MCS-8504316 and AFOSR-84- 0398 and Contract AFOSR-F49620-86-C-0111.
! This research was supported in part under Grant AFOSR-86-0256.
580 0022-247X/89 $3.00 Copyright 0 1989 by Academic Press, Inc. All rights of reproduction in any form reserved.

NONLINEARITIES IN PARABOLIC MODELS 581
this paper in studies with data from experiments for aphid-ladybird beetle interaction in goldenrod stands [4].
While the work reported below is thus well motivated by real applica- tions, the focus of this paper is mathematical in nature. We present in Section 2 a theory for the convergence of approximation schemes in inverse problems (this theory also yields a stability or continuous dependence of parameter estimates on data similar to that discussed in [ 11). The approach we take here involves variational arguments in the spirit of those discussed in [ 1 ] and sometimes employed in presentations on convergence of finite element techniques. Although we announced these results earlier in [7], this is the first rigorous presentation of the mathematical foundations of these methods.
In Section 2 we give a fairly general theoretical framework and show in Section 3 how several specific examples (density-dependent dispersal, nonlinear growth, predation) of interest fit readily into this framework.
We discuss computational aspects (implementation and numerical exam- ples) in Section 4. In addition to the example involving application of the methods to field data already mentioned above, we present in this section several numerical test examples designed to demonstrate efficacy of the methods. Since (due to the nature of the inverse problems addressed) the methods can be computationally quite intensive on sequential computers, we also discuss an example to demonstrate how vector machines such as a CRAY 1-S can be used to significant advantage in such inverse problem methods.
The mathematical notation we use throughout is quite standard: The usual notations L”, Hj(0, l), W1~m(O, 1) represent standard Banach and Sobolev spaces. At times we denote spatial differentiation by D = djdx.
2. THEORETICAL FOUNDATIONS
For our model equations, we consider the system (i = 1,2)
au. a -g=G =%i(t, x, 42
( > +“fi(u1, %I for ?E [IO, T], xfz [0, l]
$,O&(t, l)=O
u,(O, x) = UOi(X).
In this system, ui(t, x) represents the density of the ith species at time t and position x; due to the nature of the experiments which motivated this work, we will consider movement as though constrained to one spatial

582 BANKS AND MURPHY
dimension. The parameters on which we would like to focus here are the nonlinearities gi andfi. We believe we are the first to treat the problem (at the level of generality we do) of estimating such unknown functions. The terms gi (which we shall refer to as “diffusion” terms, by analogy with dif- fusion/reaction equations) model random spreading (as opposed to direc- ted movement). A growing number of biologists now feel a simple constant diffusion term is insufficient to describe insect dispersal (see, for example, [ 111); here we assume that it is density dependent. The nonlinearities f, (which we shall refer to as the “reaction” nonlinearities), also assumed to be unknown, represent mechanisms such as birth/death, immigra- tion/emigration, and predation. We will establish convergence results for estimation of a very general class of the unknown parameters described above, but will then present specific, motivating examples of such classes which are of interest to population biologists; our numerical examples are drawn from these.
We note that the biological problems motivating our efforts here influen- ced our choice of Neumann boundary conditions in the model system (1); we could readily treat other standard types of boundary conditions (e.g., Robin or Dirichlet) with straightforward modifications of the ideas presented here.
We define our general class /1= LI, x /1, of admissible diffusion coef- ficient functions by listing hypotheses that the member elements must satisfy. We assume for each i = 1, 2 the following:
(Al) Every 9 E /ii is such that 5 -+ 9(t, X, 0 is continuous for 5 E I$. (A2) There is a constant Bi > 0 such that
for every 9eni, UEP(O, l), and $EH’(O, 1). (A3) There is a constant Oi>O such that
for every 9 E /li, u E L”(0, l), and II/ E H”(O, 1). (A4) There exists Big L”( [0, T] x [0, 11) such that
for every 9 E ni, 5, q E R.
Assumption (A4) implies

NONLINEARITIES IN PARABOLIC MODELS 583
(A5) There exists a constant Ki such that
P(t, ., ul)-g(t, ‘9 U2)loGKi 101 -uzlo
for every 9~/i,, and ul, u~EL~(O, 1).
We will further assume that the sets ni are compact in the following sense:
(A6) Any sequence in /ii has a convergent subsequence ($3“) with limit 9 in ni in the sense that
pqt, .) u)-qt, .) u)lz, -0 in HO(O, T)
for every u E L”(0, 1).
We turn next to a discussion of the admissible class 5 = S$ x 4 of reac- tion nonlinearities. We assume that there exist numbers wi > 0 such that f, is constant for all (qI, v],) outside W = W, x W,, where Wi E [0, wi]. Hence it is sufficient to estimate fi on the bounded region W. We will further assume that each e is a compact subset of C(W). Finally, we assume that eachfE 6 satisfies a Lipschitz condition of the following form:
Before stating the parameter estimation problem precisely, we first rewrite the original equation (1) in weak, or variational, form. We shall use the notation f= (f,,f2)T to denote a vector function, Df= (Ofi, Of*)‘, &I, x, U)= (gI(t, x, u,), g2(t, x, u2))‘, and (., .), 1.1 will be used to repre- sent the inner product and norm for either H’(O, 1) or H’(O, 1) x H’(O, 1) whenever it is clear from the context which is meant. Equation (1) is then equivalent to
(U,, (P) + (g(t, ., 4OW D@) = (f(f4, (p>
forall @eH’(O, l)xH’(O, l),
U(0, .) = u,.
(2)
We will introduce an approximation scheme and pose a parameter estimation problem involving approximating (computationally tractable) differential equations. We are interested in questions of convergence for our numerical schemes. We want to know when one can expect that optimal parameter fits obtained using this approximating system (call these parameters qN) will yield useful information regarding best-lit parameters for the original system (call these parameters q*), i.e., we want to prove that qN+q* as N+ co, in some sense. As we shall see, assumptions (Al )-(A6) and (Bl ) are conditions under which we can argue subsequen-
409:141!2-I9

584 BANKS AND MURPHY
tial convergence of parameters. We are not focusing on questions of existence and uniqueness here; we defer such questions to a separate investigation. For this paper we will simply assume that members of A and 9 possess sufficient regularity to guarantee that solutions of (2) satisfy
(Cl) u E H’([O, T]; W’~X(O, 1) x W’%m(O, 1)) and U, E L’([O, r]; HO(0, 1) x HO(O, 1)).
Let Q = A, x A, x 9, x FZ denote the admissible parameter set. Given data y’(x) = (y{(x), y:(x)) corresponding to a solution of (1) or (2), at various time observations { t,} :=, , we state the parameter estimation or identification problem as:
Find q = (9, , 9?$, f, , fi) E Q which minimizes
J(q) = i: /j’- U($, .; q)12 j= 1
subject to U a solution of (2).
(IDI
We assume that a sequence of approximating state subspaces HN c H ‘(0, 1) has been chosen (in our case, these are based on spline functions); we then define PN to be the orthogonal projection (in the Ho topology) of H’ onto HN. We will discuss the construction of HN in more detail when we present our numerical results in a later section. For now, we will assume the projections and spline subspaces are such that the following convergence statement holds (the spline schemes we have used satisfy such hypotheses):
(Dl) Let PN=PNxPN:(H’xH’)-+(HNxHN). If cpeH”xHo then IPNCp-Cpl+0 as N+co; if @EH’xH’, then ID(P,@--@)I--+0 as N-CO.
Given such an approximation family, for each N we define an approxi- mating equation to (2) by
<ii;, (p) + (B(t, .) UN)@DiiN, Dcj) = (f(i”), cp) for all @ E HN x HN
UN(O, .) = P,U,. VN) The associated approximate identification problems can then be stated as
Find q E Q which minimizes
F(q)= i lyj-iP(t,, .; q)l” (IDN) j=l
subject to UN a solution of (2N). To actually implement these ideas (i.e., to compute the minimizer q of JN), one has to either parametrize or approximate the infinite-dimensional

NONLINEARITIES IN PARABOLIC MODELS 585
parameter set Q. We shall return to this point in later discussions. Suppose for now that we have generated a sequence of solutions {qN} for the problems {IDN}. We are guaranteed that such solutions exist by the con- tinuity of JN in q (that JN is continuous in q follows from the continuity of the approximate solutions u’“; this continuity can be seen most clearly from the ordinary differential equation representation of (2N) which will be discussed in Section 4) and the compactness (by assumption) of Q. The compactness of Q also ensures that a subsequence of { qN} converges to a limit in Q. We would like to know that this limit is a solution of (ID); as argued in previous work by these authors and others (see, for example, [2, 3]), this result follows once we show that for an arbitrary sequence (4““‘) c Q, qN --f q in Q implies UN(t; qN) + ti(t; q) in H’(O, 1) x H’(O, l), for each t in [IO, r], where UN(t; qN) represents the solution of (2N) using the parameters q”‘, and ii(t; q) represents the solution of (2) using q. Using the convergence statement (Dl), and the triangle inequality IUN(t; qN) - zT(t; q)l 6 IUN(t; qN) - P,fZ(t; q)j + IP,ii(t; q) - ti(t; q)l, we see that we need only prove that I U”( t; qN) - P,U( t; q)] -+ 0 as N -+ cc for each t in [0, r] in order to obtain the desired result. Henceforth, we shall use the notation UN = ti”(r; qN), U = z?(t; q), and we shall let ZN = U” - P,U (note that Z”(t) E HN x HN); moreover, we shall assume qN -+ q in Q (i.e., for i= 1, 2, g;Y -+ 9, in the sense of (A6) and ,f” +f, in C( IV)). Using Eqs. (2) and (2N), we have for any II/EH~xH~cH’xH’
(Z~,~)=(U~--U,,~)+((~--PN)~,,~)
= (&U)@DU--N(zTN)@Dz2N, Dtj)+ (f”(ti”)-f(C), 1+6)
+ ((z-pN)u,, $).
If we choose $ = jN in the above equation, we get
;; IZNJ2= (a(ti)@DG-gN(UN)@DtiN, DZN)+ (,f”(U”)-,f(U),ZN)
+ ((I- P,)ii,, 2”). (3)
Let us consider each component of the first term on the right-hand side of Eq. (3), (~i(ui)Du,-~~(~~)D~N, 0~;“). For convenience, we shall drop the subscript i in the following estimates. We have
(~(u)Du-~~(z/‘)Du~, DzN)
= (SS(u)Du-BN(uN)DPNu, DzN)- (QN(uN)DzN, DzN)
< (~(u)Du-9~‘(uN)DPNu, DzN)-0 lDzN12
= ((9(u)-gN(u))Du, Dz”) + ((~“(u)-~~(u~))Du, DzN)
+ (@“(uN)(Du-DPNu), DzN)-8 (DzN12

586 BANKS AND MURPHY
<; ID2412 Icqu)-9”(u)l’, +F lDul2, (lU-pNUI*+ lz”l’)
+g,D(u-PNU)l*+ 2-e IDzN12, ( > where we have used (A2), (A5), and (A3), and c is any positive constant. If we choose c = 012, we obtain
(~~(u)Du-~~(u~)Du~, DzN) <f IDul* I9(+9”(u)12,
+T lDul2, (lu-PNu12+ Iz”l’)+$ ID(u-P%)I*.
Defining k,(t) =max,, 1,2((1/0,) IDui12), k*(f) =max,,,,,((2Kf/Bi) (Du,~;), k, = maxi,,,,(Of/Oi), and combining the above inequality with (3), we have
+k, ID(ti--PNti)~*+;I~“(uN)--f(U)12
+; I(Z-PPN)iit12+ 1q*. (4)

NONLINEARITIES IN PARABOLIC MODELS 587
From (Bl ), it follows that
If”(ii”) -f(ii)12 d 2 If”@“) -f”(u)l’+ 2 If”(C) -f(U)l’
<4p21ziN-cl*+2 If”@)-f(ti)l’
<8p2 ITN12+8p2 IP,U-iii*+2 I~N(ii)-f(fi)12.
Finally, substituting the above inequality into (4) we obtain
;f JZN12< (kz(t)+ 1 +4p2) IzN12+k,(t) IL&+W(U)IZ,
+ IfNtu) -f@)l’ + &2(l) + 4p2) Itz- pN)“12
+k, ID@-P,u)lZ+; I(z-P,)ii,12.
If we define w(t) = 2k,(t) + 2 + 8~~ and
hN(t)=2k1(t) I@+aN(u)12, +2 If”@)-f(zq2
+2(k2(t)+4p2) [(I-P,)ti12+2k3 lD((Z-P,,+)12
+ [(I- pN)“,12
then the above estimate is of the form
-$ [TN12 <co(t) IzNl*+hN(t).
It follows from the convergence qN + q in Q, the smoothness assumptions, (Cl), made about the solution of (2) and (Dl) that h”‘+O in L’(0, T) as N -+ co; the assumptions in (Cl) also ensure that o E L’(0, T), and hence, the Gronwall lemma implies that IZN12 + 0 as N--t 00, as desired.
The above estimates, together with the discussion preceding them, provide the essentials of the proof of the following theorem.
THEOREM. Consider model equation (1). Suppose we search for q=(91,92,fi,f2) in Q=AlxA2xFlx~2, where we assume A,,A, satisfy assumptions (Al )-(A4) and (A6), and Fl, F2 satisfy (Bl ) and are compact subsets of C( W); we further assume that Eq. (1) has a solution satisfying (Cl), and we have an approximation scheme which satisfies (Dl). Then, for each N, (IDN) has a solution qN, and there is a subsequence {qNk} with the property that qNk + q in Q, with q a solution of (ID).

588 BANKS AND MURPHY
,
3. SPECIFIC EXAMPLES
In this section we discuss a particular class of examples that are included as a special case of the theoretical framework developed in the previous section. This class of examples involves models that have been suggested to describe the dynamics of populations in which density-dependent dispersal and nonlinear growth/death, etc., are important components.
Density-dependent “diffusion” has been discussed by several authors, in various forms (see, for example, [ll], or [14, 15)). The form we chose to consider here is
1
f,(t, x) for Y <~,(t, x)
%i(t, x, Y) = @;(t, xl + Bitt, X)Y for ji(tJ)<yQYj(t,X)
Li(t, x, for y > yi( t, x),
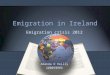
where, to satisfy the continuity in y assumed in (Al), we require that ei(tyx)-Ui(t,x)+ji(t,~)Yi(t,~) and L,(t,x)~~,(t,x)+/?i(t,x)Yi(t,~); Fig. 1 is the graph of a typical such GBj(t, x, y) vs. y for a fixed t and x. One biological interpretation of the diffusion represented by such a Bi, in the case of insects, for example, is as follows: At sufficiently low densities, the insects disperse with a density-independent basal value. Once a certain threshold density has been reached, they begin to disperse at a rate which increases with increasing density; at high density, the dispersal rate saturates at a maximum, density-independent value. This dispersal coef- ficient could be used to model a population which is sensitive to overcrow- ding effects-the saturation is indicative of the fact that insects can only move so fast, despite an inhospitable environment.
FIGURE 1

NONLINEARITIES IN PARABOLIC MODELS 589
We will make some further assumptions in order that this particular form of gi will fit into the theory outlined in Section 2. We assume for i = 1, 2 that cl; E A, pi E B, _yi E r, and ljj E F, where
A={cc~L~([O,T]x[O,l])~~Qcr(t,x)<5a.e.},
B= {fl~L~([0, 7’1~ [0, 11) / b<fi(t,x)<1;a.e.},
L= {YEL~([O, T] x CO, 11) I -cl dy(t, x)dZ, a.e.},
T= (~EL~([O, T] x [0, 11) 1 _c,<y(t,x)bc,a.e.},
and a, 4 b, 6, -cl , Cl, _c,, C, are all positive constants with c, > C,. With these assumptions, it is straightforward to verify that (A2)-(A4) are satisfied. Furthermore, the compactness condition, (A6), is satisfied if we assume that each of the sets A, B, r, r is a compact subset of C( [0, T] x [0, 11). (We could impose weaker compactness conditions and still remain within our established theory; however, these weaker compactness assump- tions are harder to characterize, and thus more difficult to implement numerically.) At this point, we have reduced the estimation of L@ to the estimation of a set of temporally and spatially varying coefficients. In our numerical examples (in the next section) we further reduce cli, pi, )i, jJi to constants. We remark, however, that truly temporally and spatially varying coefficients have been successfully estimated in other contexts and could be here as well. Following the ideas presented in [S, 61, we could, under stronger assumptions on the parameter sets A, B, i=, r, develop an exten- sion of our theory, in which we search for unknown functional parameters within finite-dimensional approximation spaces AM, B”, TM, TM. In this case the parameter approximation space n M = AM x BM x CM x FM x AM x BM x TM x FM would be chosen in such a way that we could expect AM to approximate A in an appropriate sense, with better approximation for larger M. We direct the interested reader to [S] for details (both theoreti- cal and numerical) of one such approach; there the authors wish to estimate a function q(t, x). Using either bilinear or bicubic spline sub- spaces, they estimate q”(t, x) = zz.=, 6jjpi(t)pj(x), where 6, are constants (the unknowns which are estimated) and fli, pj are (known) spline basis elements.
In many of our numerical examples, we have assumed a parametrized form for the reaction nonlinearity terms. We were motivated by a biologi- cal application (see [4]) in which Eq. (1) represents the population dynamics of a predator-prey relationship, with u1 the density of prey and u2 the density of predator. The functionf, encompasses population growth of prey and loss due to predation, while f2 is a combination of emigration and immigration of predator. The mechanisms for such a model have classical representations. Specifically, we consider cases where f,(u,, u2) =

590 BANKS AND MURPHY
r(ui)-p(ui, z+) and f2(u1, u,)=i-e(u,, u,); here r(u,)=r,u,+r,u:- r3u: is the growth rate of the prey, p(ur , u2) =p, uluZ represents predation on prey, i is the rate of immigration (assumed constant) of predator, and e( u r, u2) = u2 @( u r ; 2) is a predator emigration term (we have parametrized @ in terms of an unknown vector t? in several ways to be discussed in the next section). Both f, and f2 are assumed to be constant outside some region W (defined in Section 2). The interested reader can find a discussion of the biological justification for such forms of f, in [4]. With these parametrizations, the estimation of fi , f2 is reduced to the estimation of the constants rir pi, i, e,. If we search for these constants within a set of compact subsets of R, then all our required assumptions about the reaction nonlinearities are met, and such examples fit into the theory established above.
In some situations it may be desirable to estimate the shapes of unknown functions without an a priori parametrization. Such procedures can also be treated in the context of the mathematical and computational framework presented in this paper. To illustrate the ideas involved, consider the case where one wishes to estimate a reproduction term r (i.e., assume fi(u,, uz)-Y(u,) without assuming r is necessarily cubic) within a given family e={f~ W’,m(W,) 1 f(O)=O, lDfl,<p, IfIm<v}, where W, is defined in Section 2, Jo and v are positive constants. The set 9, is a compact subset of C( W,), and each f E F1 satisfies (Bl ). Let Sr( W,) denote the subspace of piecewise linear functions on W, = [0, wr] with knots at tj -jw,/M, 0 <j < A4 (see [ 123); this subspace is spanned by the “hat” functions, or linear spline elements. Define 9”;” = % n Sf”( W,). The set F”;” is also compact in C( W, ), as 6 is compact, and Sf”( W, ) is closed in C( W, ). Moreover, we can characterize 9y as i”F where iM is the inter- polating operator from W’*m( W,) to Sy( W,) (i.e.,Lfbr any fE W1,Oo, i”f is the unique element in S;U satisfying i”‘f (t,) =f (t,) for j= 0, 1, . . . . M). We restate the approximate parameter estimation problem as minimize JN over eM where QM = A, x A2 x 9”;” x 4. (For ease in exposition, we have assumed that all other parameters besides f, = Y are constant, or have been parametrized resulting in a set of constants.) If we define IM =id x id x iM x id, where id is the identity map, then we can write QM = Z”Q. The sets QM for each M are compact, implying that a solution 4 N,M will exist for every N, M. Moreover, since qN*M E QM and QM c Q, we have a sequence { qN, M } in the compact set Q; thus a subsequence {qy*Mk} exists in Q with qy,Mk -+ q* E Q as N,, M, + co. We claim that this limit, q*, is a solution of (ID). By the definition of qNj,Mk, we have JNl(qNj,Mk) 6 JNl(q) for all qE QMk, which implies that JNl(qN~~Mk) < JNI(IMkq) for all qE Q. We now use our earlier result (with a relabeling of sequences) and let N,, M, + cc. It follows that J(q*) <J(q) for all q E Q (standard spline estimates, see, for example, [ 131, can be used to argue that ZMkq + q as

NONLINEARITIES IN PARABOLIC MODELS 591
M, + cc ). Estimation of nonlinearities in p(u, , u2) or e(ul , u2) could be treated in a similar manner. In the next section we present examples in which we estimate r(ur) and @(u,; C), without a priori parametrizations.
4. NUMERICAL IMPLEMENTATION AND EXAMPLES
In this section we describe some of our computational experiences with the methods described above. We were motivated by the problem of fitting field data from an experiment involving a ladybug-aphid predator-prey interaction [8-lo]. Before (and concurrent with) fitting real data, we test our packages using simulated data. This serves to ensure that our codes work, as well as giving us insight into the limitations and sensitivities of our algorithm. To create a test example, we choose “true” values of the parameters, then use these values to solve the model equations, giving us our “data.” In some cases we construct our example in such a way that we have an analytic solution, in others we generate data numerically, with an independent PDE solver (for the examples reported here we have used MOLlD-a subroutine package for the numerical solution of PDEs, developed by James M. Hyman at Los Alamos Scientific Laboratory).
In all our test examples, we have used dispersion parameters $3 which are either constant or of the form Qi = si(u,); none has time or spatial dependence. Thus, in the derivations to follow, we assume 9; = 9Qui), For later reference, the model equations we consider are
(5)
u,(O, x) = Y,(x).
Once we have chosen the state approximation subspace HN, a system of ordinary differential equations equivalent to (2N) can be derived. Suppose (Bi(x)} ri, is a basis for HN; in all examples below, we have chosen { Bi} to be the cubic B-splines on the mesh {xi} given by xi= i/N, i= 0, 1, . . . . N (see [12]), but other choices of elements can lit into our theory.
Then ~r(t, .) E HN implies that ~r(t, x) = CyL I w,(t)Bj(x) (for i = 1,2), and requiring that (2N) hold for all (p E HN x HN is equivalent to requiring

592 BANKS AND MURPHY
that {W,}yL, and {w,}~~~ satisfy the following system of ordinary differential equations for all k = 1, 2, . . . . Nl : For i = 1 and i = 2,
In order to solve (IDN), we will, for each fixed N, iterate on the unknown parameters 9,, f,; within each iteration, we must solve (5~~) for { wij}~~, and { wy}~~, in order to form JN.
First, for the purposes of illustration, consider the very simple case of C@ = constant and f, = 0. Then our equations are linear, and system (5N) can be written as (i= 1, 2)
A%J t) = -G&Kw,( 2)
.Xwi(0) = R,
where JH is an Nl x Nl matrix with entries M,= (Bi, Bj), K is an Nl x Nl matrix with entries K,= (DB,, DBj), R is a vector in RN’ with entries R, = ( Yi, Bi), and w, is the solution vector wi = (wi,, . . . . wiNi) for i = 1,2. In this simple case, the computations involved in solving (IDN) would not be intensive; the entries of the matrices 4’ and K and the vector R are computed as numerical quadratures, and stored once for a fixed N. An iteration on the parameter LSj requires a multiplication, and then solution of the system of differential equations. Once we introduce the non- linearities, fi, however, we must recalculate the quadratures represented by (fi, B, ) in (5N) every time we iterate on f,. These computations can be very unwieldy on a conventional computer--especially with as many as 10 unknown parameters on which to iterate. This is the situation we encounter in the fairly simple model equation having constant diffusion and classical parametrizations for f, such as
fl(Ul> u2) = r1 UI + w: - r34 -pulu2
f2(uI 5 u2) = i - u2(el + e2 ev( -e3u1 1)
(6)
in the bounded region [Uj <K, and fi,f2 constant in U outside this region. For polynomial functions in the states, we can alleviate some of the computational difficulties described above. Note, for example, that r,(u;“J2 = r2 C;“=l, C;“l 1 W,iWljBiBjy so that (r,(u;“)‘, Bk) =

NONLINEARITIES IN PARABOLIC MODELS 593
rzcT;, 1 WI WjJA BiB,B, d x. The numerical quadratures (specifically, the terms j: B,B,B, dx for all i, j, k-many of which would be zero due to the nature of the B-splines) can again be computed and stored once for each N. The differential equations to be solved for { njjj} will not be linear, and the construction of the right-hand sides of these differential equations will be more complicated than for the linear case. Yet much is saved over the brute force approach of recomputing numerical quadratures for every iteration on r2. All the terms in f, except the exponential can be handled in a similar manner (e.g., the term containing r3 involves the computations of j: B, B,B, B, d-x). A linear diffusion term can also be treated in this way. If 2?;(u) = c(; + fliu, then we need to compute
w;,B, >
F wvDBj, DB, ,= I >
= aj f w)~(DB~, DB,) + Bj f wi~W~(B,DBj, DB, >; /=I l.j= I
hence we need to compute and store s: B,DB,DB, dx. Our first examples were run on an IBM 3081; to keep our test problems
manageable, we reduced the complexity in various ways, as will be apparent in the examples below. Later, we gained access to a CRAY (the l/S, then the X/MP) through Boeing Computer Services, under the auspices of NSF. We were then able to test more complex sample problems and some of these will be described below. Finally, we will conclude this section with some comments about our attempts to fit the field data men- tioned earlier.
In all our test examples, we first chose “true” values for parameters (designated q*), then generated “data” (as described above) at 11 equally spaced points in space and 3 equally spaced points in time. To generate a sequence of parameter estimates with these data, we fix N and choose an initial guess for parameter values (4’). We use the IMSL subroutine ZXSSQ (based on the Levenberg-Marquardt algorithm) to perform the optimization, resulting in a best fit 4”. Within each iteration of ZXSSQ, the ordinary differential equations are solved with the IMSL subroutine DGEAR (based on Gear’s method). We use the parameter estimate 4” obtained with the first value of N as the initial guess to solve (IDN) at the next higher value of N, and so on.
EXAMPLE 1. Our model equation is (5) with constant diffusions g1 and &, and with fi as in (6) (here we have K= lo), and Y,(x)= Y,(x)= 4.0 - 16.0 (x-OS)*. This represents a full two-species interaction, and involves 10 parameters. For the purpose of testing the algorithm, with the

594 BANKS AND MURPHY
TABLE 1A
Parameter values Residual sum of squares
ry = 2.0 r; = 2.0 ry = 2.0 p” = 2.0 i4 = 1.027 f4 = 2 0.978 i4 = 1.017 3 /i4 = 0.937 J4(cj4) = 0.434 x 1om4 rf is = 0.977 1.0 = ri= J8 1.0 1.054 = = r$=l.O is 1.039 p* p8 = = 0.956 1.0 J*(g) = 0.399 x 1om5
TABLE 1B
Parameter values Residual sum of squares
p” = 2.0 e; = 18.0 62; = 2.0 @4=0.994 z i4 = 20.089 c4 = 1.005 3 J”(cj4) =0.412 x 1O-4 is = 0.997 P8 = 20.092 g8 3 = 1.005 J8($y=O.171 X 10-S p* = 1.0 ef = 20.0 e: = 1.0
limitations of a conventional (i.e., scalar) computer, we search for only 3 or 4 of the parameters, assuming the others are known. The true values of the parameters are 9: = 0.1, 9; = 0.5, r: = r: = r: = 1.0, p* = 1.0, e: = 1.0, e: = 20.0, e: = 1.0, and i* = 3.0. We first estimated r,, r2, r3, and p, holding all other parameters fixed at their true values. Our results are summarized in Table 1A. We present results in Table 1B from the estimation of q = (p, e,, e3), holding all other parameters fixed at their true values.
EXAMPLE 2. Next we consider a state-dependent coefficient 9. So that we could use an analytic solution to obtain our data, we considered a scalar equation (or a “one-species” model). In this case, we chose a solution, chose our parameters 9 and f, then introduced a term F( t, x) into the differential equation, determined by
F=$--& La(u); -f(u). ( > Our model equation for this example is thus
au a z=z s(u)g +f(u)+qf,x),
( > O<t<l, OGx61
(7) u(t, 0) = u(t, 1) = 0
u(0, x) = Y(x).

NONLINEARITIES IN PARABOLIC MODELS 595
TABLE 2A
Analytic Solution (No Noise)
Parameter values Residual sum of squares
cP= 1.0 p = 3.0 r; = 4.0 r; = 2.0 c? = 2.99997 /i’ = 1.00002 i; = 2.WOO8 i’: = 0.50003 J4(cj4) = 0.604 x lo- ” a* = 3.0 p* = 1.0 r2* = 2.0 r: = 0.5
TABLE 2B
Analytic Solution (Noise Added, -2%)
Parameter values Residual sum of squares
a0 = 2.0 p” = 2.0 oi4 = 3.ooO40 /? = 1.01364 J”(ij”) = 0.327 x IO-* a* = 3.0 p* = 1.0
TABLE 2C
Analytic Solution (Noise Added, -2%)
Parameter values Residual sum of squares
i-j = 3.0 i-y = 1.0 r; i4 = = 2.0 2.17080 i-i i4 = 0.5 0.6009 1 J”(ij”) = 0.297 x 10m2 =
We chose 9(u) = c( + Bu and f(u) = r2u2 - r3u3, and Y(X) = 6x( 1 -x); the true values of the parameters are u * = 3.0, /3* = 1.0, r: = 2.0, r: = 0.5. We first estimated all four parameters with our exact data (because we have an analytic solution, we can input data with essentially no noise). We then estimated each of 9 (i.e., c( and /3) and f (i.e., r2 and r3), using data that had been corrupted by noise at a level of about 2%. The results of these examples are presented in Tables 2A-2C. The purpose of such an example is to obtain some experience with regard to the sensitivity of the estimates to the purity of the data (i.e., robustness of estimates with respect to observation error).
EXAMPLE 3A. In this example, we return to the full two-species model of Eq. (5), now adding the linear state-dependent “diffusion” coefficient of the previous example. The initial conditions are Y,(x) = 6x( 1 -x),

596 BANKSANDMURPHY
TABLE 3A
IBM 3081
Total CPU Residual sum
Parameter Values (=I Time/FE” of squares
q= 1.0 p:= 1.0 z;= 1.0 p;= 1.0
ci: =0.1032 8: =0.4823 3i; =O.llOl &=0.4687 1044.0 10.74 55(4’)=0.199x 10-l
a:=0.1 p: =0.5 z: =O.l p: = 0.5
a FE = function evaluation = evaluation of J”
Y,(x) = 60x( 1 - x). To make the parameter estimation feasible on the IBM, we parametrize f, solely in terms of polynomial representations (J; are as in (6), except that the emigration term used is @(u, ; e) = e , - e2 u i ), and we attempt the estimation only of cli, flj in 9i(ui)=a,+/?iui, holding all the parameters off, fixed at their true values. The true values of the parameters are cc~=cc~=O.l, /I:=/I2*=0.5, v,*=l.O, rf=2.0, r:=0.5, p*=l.O, e: = 5.0 ef = 0.5, and example.
i* = 3.0. Table 3A contains the results of this
We have included CPU times for this example because this is one which we later repeated on the CRAY. The CRAY has faster arithmetic than the IBM 3081, as well as having vector-processing capabilities. We note that numerical quadratures are readily vectorized calculations (while the method described earlier for making use of the polynomial form of special parametrizations off, is not efficiently vectorized). Thus, we discovered that it is actually more effective to recompute the quadratures in the differential equations when using a vector supercomputer; this suggests that the more complex nonlinearities need no longer be so computationally intimidating. We present our next example as a means for comparison of the CRAY to the IBM. In the IBM example (Example 3A, above), all quadratures have been computed ahead of time and stored, a more efficient technique for this machine, while in the CRAY example (Example 3B, below) all quadratures are computed as they are needed, the more efficient technique for this machine. It should be noted that different versions of software packages (e.g., the Levenberg-Marquardt and Gear routines) are available on the different machines, so a direct comparison is perhaps not completely meaningful. To compensate for the difference in optimization algorithms, we have listed CPU time required per evaluation of JN (referred to as function evahrations) as well as total CPU time.
EXAMPLE 3B. The model equations and true parameter values are exactly as in Example 3A. The difference is that this example was run on the CRAY. See Table 3B.

NONLINEARITIESIN PARABOLIC MODELS 597
TABLE 3B
Parameter values
Total CPU Residual sum
(set) Time/FE” of squares
u: = 1.0 by= LO d’= 1.0
2: = 0.1101
p:= 1.0
ri; = 0.1034 & = 0.4817 & = 0.4685 55.0 0.34 Js(ijs)=0.283x lo-’ a:=o.1 p:=o.s 1: =O.l /I: = 0.5
u FE = function evaluation = evaluation of J.’
The next two examples illustrate the estimation of a dispersal coefficient of the form originally proposed at the beginning of Section 3 (except that z, /I, _y = yO, y= y, are constants), and a reaction nonlinearity in which we have not assumed an a priori parametrization, as discussed in Section 3.
EXAMPLE 4A. We again use (7) as our model equation with
“+bb u < Yo 9(u) = c( + pu, YOdU<"r',
"+PYI, U'YI
and f(u), F(‘(f, x), and Y(x) as in Example 2. We chose true parameter values a* = 3.0, p* = 1.0, y$ =OS, y: = 1.6, r; = 2.0, r: =0.5, and

598 BANKS AND MURPHY
TABLE 4A”
Parameter values Residual sum of squares
a0 = 2.0 p” = 2.0 y;= 1.0 yy = 1.1 i6 = 3.177 8” = 0.866 f; = 0.185 f; = 1.644 J6(cj6)=0.156x 10m3
P = 3.037 Bg’: I ~$69 f: = 0.463 ji;‘= 1.614 J’4(#4) = 0.267 x lo-’ a* = 3.0 yo’ = 0.5 y; = 1.6
‘See Fig. 2.
generated data (we no longer obtain the analytic solution from Example 2 if we change 9) with MOLlD. We have indicated parameter values in Table 4A, but also include the results of this example in Fig. 2, where we have graphed go, &, $14, and 9* (i.e., after estimating ~1, fi, yo, y1 at various approximation levels, we graphed the corresponding 9).
EXAMPLE 4B. We use the same model equation as for Examples 2 and 4A, with f, F, and rj the same, and r; = 2.0, r: = 0.5, as in these examples. We chose
with N*, /J* as in Example 2, and y$ = 0.0, y: = co; theoretically, then, this is exactly the same model problem as that of Example 2. We use the numerical code developed for Example 4A to estimate yl; i.e., we ask the package to estimate a saturation limit, when there is none. What we found is that the estimate returned for y1 is very close to the maximum solution value over the region (t, x) E [0, l] x [0, 11, which is the best one could expect (see Table 4B).
TABLE 4B
Parameter values Residual sum of squares
yy = 1.5 9; = 2.909 J4(G4)=0.217x IO-” y:=oo
Note: Max o<,<,.o<y<, lu(t,x)(=3.00025.

NONLINEARITIES IN PARABOLIC MODELS 599
EXAMPLE 5. In our final test example, we focus on estimating f(u) without a priori parametrizations. We use model equation (7) with a con- stant diffusion 9* = 3.0, true f*(u) = 2u2 - 0.5~~ and constant outside the set IV, initial condition Y(x) = 6x( 1 -x), and F computed as described in Example 2 (we have an analytic solution). With our analytic solution, we can evaluate W=maxgG,G,,,C,G, lu(t, x)1, then evaluate f on the state- interval W= [0, w]. In a problem with field data, w could not be calculated in this way (the value of w would be some population level at which f saturates; this will be determined by the biology). The value of u’ can be estimated, however, by inspecting the data then choosing w as the maximum data value (clearly, we cannot hope to estimate f for intervals of u outside the range of our data; thus we may as well assume w = max 1~1). We have performed numerical experiments in which we purposely over- estimate w, and find that fN,M is essentially constant over the “excess” interval. Since, in general, we do not know w, and therefore do not know the length of the interval over which we need to approximatef, we choose a stepsize h (instead of the number of intervals, M; if we know w, then h and A4 would be related as h = w/M). We then use fN,h to designate the best fit to the parameterf, with level of state approximation denoted by N, and level of parameter approximation denoted by h. We have graphed the result of one such run, using N = 6, h = 0.65, in Fig. 3. In this same run, we simultaneously estimated 9; we guessed go= 1.0, and estimated 4” = 2.9993.
FIGURE 3
409/141/Z-20

600 BANKS AND MURPHY
Finally, we wish to conclude this paper with some relevant observations regarding our attempts to tit the field data mentioned earlier. This work has been reported on in detail in [4]. The model equations for these data are
au, ah, O<t<2, O<xbl
l;t=92~-%&4,)+~,
where ui,,(x) is assumed known (it is actually approximated by inter- polating discrete observations). The diffusions are expected to be very small constants. Kareiva [S-lo] designed and gathered data from experiments in which he studied an interaction whose major mechanisms are growth of and predation on prey (r and p) and emigration and immigration of predator (e and ;). We parametrized (with success) r and p by polynomial represen- tations described earlier. The immigration term i is expected to be con- stant. We initially tried to parametrize e as e(u,) = e, - e2uI (a form used in test Examples 3A, and 3B). A very natural postulate is that this emigra- tion function should decrease with increasing u,, i.e., the predator should leave the experimental area at a slower rate when more prey are available, and this is the simplest form to implement numerically (as discussed earlier). We found, however, that our optimization routine consistently returned best-fit values of e, and e2 such that the function e became negative for high ur values. This is biologically unacceptable. We could at that point have tried to implement constraints to keep this from happening, but, since we postulated that perhaps the true emigration function should be steeply decreasing at low U, values, then more gradually decreasing at higher u1 values, we determined that a straight line for e was just not appropriate. With our access to the CRAY, we were able to try new parametrizations, specifically e(ur ) = max{ e, - e2 u1 , 0} and the exponen- tial function of Example 1. We have graphed sample functions of each of these three parametrizations in Fig. 4. Both of these last two parametriza- tions enabled us to achieve good fits to the data, where we measure quality of fit as follows: First we calculate the total sum of square errors TSSQ = Cf= r C;l= 1 C;X=, (fi, - U’), where IZ, = number of temporal data points, n,=number of spatial data points, ti, represents the observation of the ith species at the jth time and kth spatial location, and U represents the

NONLINEARITIES IN PARABOLIC MODELS 601
100 200 300 400 500 600 700
FIGURE 4
mean of all the data; then we calculate a correlation coefficient R = (TSSQ - JN(dN))/TSSQ using the residual JN obtained with our estimation algorithm. For regression analysis with simpler models, this statistic R has rather standard uses in carrying out F-tests for quality of lit. For the estimation procedures developed here for nonlinear partial differential equations, R is a measure of the model’s ability to explain variance in the data. In the examples reported in [4], we have R values between 86 and 92%. A final variation on the form of e was to estimate the “shape” without a priori parametrization, i.e., to search for e in terms of piecewise linear approximations (as for r in test Example 5). We began with an initial guess that e was constant; the best fit returned by our package looked like an interpolant of an exponentially decreasing function. Indeed, without

602 BANKS AND MURPHY
assuming anything about the qualitative behavior of the function e, we estimated something very much like the “shape-constrained” a priori parametrizations we originally had chosen on biological grounds. This was very encouraging, to both the biologist and the mathematicians in this particular modeling project.
REFERENCES
1. H. T. BANKS, On a variational approach to some parameter estimation problems, in “Proceedings, International Conference on Control Theory for Distributed Parameter Systems and Applications (Vorau, Austria, July 9-14, 1984),” pp. l-23, Control & Inf. Sci., Vol. 75, Springer-Verlag. New York/Berlin, 1985.
2. H. T. BANKS, J. M. CROWLEY, AND K. KUNISCH, Cubic spline approximation techniques for parameter estimation in distributed systems, IEEE Trans. Automat. Control AC-28 (1983) 773-786.
3. H. T. BANKS AND K. KUNISCH, An approximation theory for nonlinear partial diNerentia1 equations with applications to identification and control, SIAM J. Control Optim. 20 (1982), 815-849.
4. H. T. BANKS, P. KAREIVA, AND K. A. MURPHY, Parameter estimation techniques for interaction and redistribution models: A predator-prey example, Oecologiu 74 (1987) 356362.
5. H. T. BANKS AND P. D. LAMM, Estimation of variable coeflicients in parabolic distributed systems, IEEE Trans. Automat. Control AC-30 (1985) 386398.
6. H. T. BANKS AND K. A. MURPHY, Estimation of coefficients and boundary parameters in hyperbolic systems, SIAM J. Control Optim. 24 (1986), 926-950.
7. H. T. BANKS AND K. A. MURPHY, “Quantitative Modeling of Growth and Dispersal in Population Models,” LCDS Report No. 86-4, Brown University; in “Proceedings, Interna- tional Symposium on Mathematical Biology (Kyoto, Nov. l&15, 1985),” pp. 988109, Lecture Notes in Biomathematics, Springer-Verlag, New York/Berlin, 1987.
8. P. KAREIVA, Predator-prey dynamics in spatially-structured populations: Manipulating dispersal in a coccinellid-aphid interaction, Lecture Nofes in Biomath. 54 (1984), 368-389.
9. P. KAREIVA, Patchiness, dispersal, and species interactions: Consequences for communities of herbivorous insects, in “Community Ecology” (J. Diamond and T. Case, Eds.), pp. 192-206, Harper & Row, New York, 1985.
10. P. KAREIVA, Trivial movement and foraging by crop colonizers, in “Ecological Theory and Pest Management” (M. Kogan, Ed.), pp. 99-122, Wiley-Interscience, New York, 1986.
11. A. OKUBO, “Diffusion and Ecological Problems: Mathematical Models,” Springer-Verlag, New York, 1980.
12. P. M. PRENTER, “Splines and Variational Methods,” Wiley-Interscience, New York, 1975. 13. M. H. SCHULTZ, “Spline Analysis,” Prentice-Hall, Englewood Cliffs, NJ, 1973. 14. N. SHIGESADA, K. KAWASAKI, AND E. TERAMOTO, Spatial segregation of interacting
species, J. Theoret. Biol. 79 (1979) 83-99. 15. N. SHIGESADA AND E. TERAMOTO, A consideration on the theory of environmental density,
Japan. J. Ecol. 28 (1978) l-8.






![THE EMIGRATION ACT, 1983epcom.org/Emigration-Act-1983.pdf · 1 THE EMIGRATION ACT, 1983 [31 of 1983, dt. 10-9-1983 ] An Act to consolidate and amend the law relating to emigration](https://img.pdfslide.us/doc/110x75/5e4809dfa0b97a0b973726e3/the-emigration-act-1-the-emigration-act-1983-31-of-1983-dt-10-9-1983-an-act.jpg)







![[3.4]_Fiber Nonlinearities](https://img.pdfslide.us/doc/110x75/55cf8e81550346703b92da6f/34fiber-nonlinearities.jpg)