Embed Size (px)
Citation preview

ESTIMATION OF FORMATION STRESSES USING BOREHOLE SONIC
DATA
Bikash K. Sinha, Jing Wang, Saad Kisra, Ji Li, Vivian Pistre, Tom Bratton and
Michael Sanders, Schlumberger; Cai Jun, CNOOC
Copyright 2008, held jointly by the Society of Petrophysicists and Well Log
Analysts (SPWLA) and the submitting authors.
This paper was prepared for presentation at the SPWLA 49th Annual
Logging Symposium held in Edinburgh, Scotland, May 25-28, 2008.
ABSTRACT
Formation stresses play an important role in
geophysical prospecting and development of oil and
gas reservoirs. Both the direction and magnitude of
these stresses are required in (a) planning for
borehole stability, (b) hydraulic fracturing for
enhanced production, and (c) selective perforation for
sand control. The formation stress state is
characterized by the magnitude and direction of the
three principal stresses. Generally, the overburden
stress is obtained by integrating the formation density
from surface to the depth of interest. The minimum
horizontal stress (Sh) can be estimated from a
minifrac, closure pressure in an extended leak-off test,
or from analysis of mud losses. However, estimating
the maximum horizontal stress (SH) magnitude
remains a challenge in the industry. The underlying
theory behind the estimation of formation stresses
using borehole sonic data is based on acoustoelastic
effects in rocks. Acoustoelasticity refers to changes
in elastic wave velocities caused by changes in the
prestress in the propagating medium. A new Stress
Magnitude Estimation algorithm yields SH
magnitude using the three shear moduli outside the
near-wellbore altered annulus together with the
Mechanical Earth Model (MEM) that provides the
overburden stress, pore pressure, and Sh as a function
of depth. Cross-dipole shear moduli are measured in
the two orthogonal sagittal planes containing the
borehole axis. The third shear modulus in the
borehole cross-sectional plane is estimated from
Stoneley data. Since Stoneley data is significantly
affected by tool effects and near-wellbore alterations,
we estimate the far-field shear modulus in the
borehole cross-sectional plane using the Stoneley
shear velocity radial profiling algorithm.
When the horizontal stresses are nearly the same (SH
= Sh), there is no shear wave splitting and cross-
dipole shear slownesses are nearly equal. Under
these circumstances, a Velocity Dispersion Gradient
(VDG) algorithm can be used in a depth interval with
a reasonably uniform lithology and where the
volumetric distribution of clay and other minerals are
nearly constant. The VDG algorithm inverts
differences between dipole dispersions at two depths
in the same lithology interval for estimating
horizontal stress gradient within the chosen depth
interval. It is assumed that observed differences in
dipole dispersions are essentially caused by
differences in the overburden and horizontal stresses
at the two depths. We discuss results of using the
two algorithms described above on waveforms
acquired by a sonic tool recorded in a few wells. The
MEM is built using drilling reports, mud reports,
petrophysical logs as well as wellbore images.
INTRODUCTION
A detailed knowledge of formation stresses helps in
successful drilling to access sub-salt and depleted
reservoirs that are prone to subsidence caused by a
reduction in pore pressure and an associated increase
in the effective stress that exceeds the in-situ rock
strength (Nur and Byerlee, 1971; Walsh, 1965). In
addition, the magnitude and orientation of the in-situ
stresses in a given field have a significant influence
on permeability distribution that can influence
planning of wellbore trajectories and injection
schemes for water or steam flooding. As we improve
our estimates of stresses from borehole
measurements, it is not uncommon to find that the
regional tectonic stress model involving large global
averages is significantly different than the local
stresses around a borehole that affect the reservoir
producibility and near-wellbore stability. Formation
stress magnitudes together with stress coefficients of
velocities also help in distinguishing radial alteration
of shear slownesses caused by near-wellbore stress
concentrations from those resulting from plastic
yielding of rock. Figure 1 lists various applications
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
1

of principal stresses together with the wellbore (PW)
and pore (PP) pressures, and rock strength in well
planning, wellbore stability, and reservoir
management. The wellbore stability application
focuses on the use of the stress model to minimize
the potential for stress-related wellbore failures by
predicting stable mud windows, defining stable
wellbore trajectories, and selecting optimal casing
points.
Existing techniques for estimating the maximum
(SHmax) and minimum (Shmin) horizontal stresses are
based on analyzing borehole breakouts and borehole
pressure necessary to fracture the surrounding
formation, respectively (Desroches and Kurkjian,
1998; Gough and Bell, 1982; Moos and Zoback,
1990; Roegiers, 1989; Zoback et al., 1985). Both
borehole breakouts and hydraulic fracturing are
destructive techniques that rely on assumed failure
models. Estimation of the maximum horizontal stress
(SHmax) magnitude from a borehole breakout analysis
uses a compressive-shear failure model along with
measured breakout widths (Vernik and Zoback,
1992). These failure-based models are used to
estimate formation stresses that help in maintaining
wellbore stability.
Some geologic intervals, such as VTI-shales, do not
exhibit azimuthal shear slowness anisotropy. An
absence of shear slowness anisotropy in a vertical
well indicates horizontal stress isotropy (SHmax= Shmin).
However, when dipole flexural dispersions vary with
depth primarily because of changes in the overburden
and horizontal stresses, it is possible to invert
differences between flexural dispersions at the top
and bottom of a chosen interval for horizontal stress
gradients in this uniform lithology interval.
In this paper we describe two non-destructive
techniques for the estimation of formation stress
magnitudes that do not require the presence of
wellbore breakouts or tensile fractures:
(a) Estimation of the maximum horizontal stress
magnitude SHmax using the three shear
moduli; and
(b) Estimation of the horizontal stress gradient
in a uniform lithology interval with
horizontal stress isotropy using differences
in dipole flexural dispersions between two
depths.
We illustrate applications of these two new
algorithms in the estimation of formation stress
magnitudes as part of case studies in different
geologic environments.
BACKGROUND
Sonic velocities in formations change as a function of
rock lithology/mineralogy, porosity, clay content,
fluid saturation, stresses, and temperature. To
estimate changes in the formation stress magnitudes
from measured changes in sonic velocities, it is
necessary to select a depth interval with a reasonably
uniform lithology, clay content, saturation, and
temperature so that the measured changes in
velocities can be largely related to corresponding
changes in formation stress magnitudes. Any change
in porosity caused by normal compaction in the
chosen depth interval is accounted for in the
inversion model by a corresponding change in the
formation effective elastic moduli and density.
Assuming that the measured changes in sonic
velocities are largely caused by changes in stress
magnitudes, it is possible to invert borehole sonic
velocities for the estimation of changes in formation
stress magnitudes.
It has been demonstrated that differences in shear
moduli are related to differences in principal stresses
in a homogeneously stressed rock (Sinha, 2002).
There are two independent difference equations
relating the three shear moduli C44, C55, and C66, and
three unknowns: the maximum and minimum
horizontal stresses, and an acoustoelastic coefficient.
Consequently, we have two independent equations
relating three unknowns. However, we can solve for
the maximum horizontal stress magnitude and an
acoustoelastic coefficient when a Mechanical Earth
Model provides the overburden stress, pore pressure,
and minimum horizontal stress as a function of depth.
The minimum horizontal stress can be estimated from
extended leak-off or mini-frac tests.
This algorithm for the estimation of SHmax using the
three shear moduli assumes that differences in the
three shear moduli are primarily caused by
differences in the three principal stresses – the
overburden, maximum and minimum horizontal
stresses. While this assumption is largely valid in a
sand reservoir with moderate fluid permeability, it is
possible to correct for the fluid permeability or
mobility induced bias in the measured Stoneley shear
modulus C66. The presence of fluid mobility in the
absence of any stress effects increases the Stoneley
slowness in the low and intermediate frequency band
of 1 to 3 kHz. This is associated with a decrease in
the Stoneley shear modulus C66 that can be estimated
from a forward model based on a low-frequency
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
2

approximation of the Biot model. Generally, a fluid
mobility of 100 to 1000 md/cp can cause a reduction
of the shear modulus C66 by about 5 to 10%.
Therefore, we are required to increase the measured
value of C66 by this amount before inputting C66 into
the stress magnitude estimation algorithm. We
suggest that we calculate fluid mobility induced
effects on C66 (in the absence of stresses) using an
independent estimate of the fluid
permeability/mobility from a MDT pretest, NMR or
core permeability. When fluid mobility from an
independent source is not known, we recommend that
the stress magnitude estimation algorithm should be
run for at least two additional values of C66’ that
could describe an upper-bound and lower-bound on
C66’ in view of possible bias in the data caused by the
fluid permeability.
Similarly, we can compensate for the bias on the
shear modulus C66’ caused by the intrinsic (shale) TI-
anisotropy in the estimation of formation stress
magnitudes provided we have estimated this
structural anisotropy from core samples in the
presence of confining pressure at the depth of
interest. Generally, C66 is larger than C44 or C55 in a
horizontally-layered TI-formation. Consequently, the
measured C66 needs to be reduced by an amount that
has been introduced because of structural effects. In
the absence of any real core data, we can run the
stress-magnitude algorithm using an upper-bound and
lower-bound for the C66 modulus that would cover
possible effects of structural or intrinsic anisotropy.
This procedure would enable putting a reasonable
bound on the estimated stress magnitudes that
accounts for the structural anisotropy bias on the
measured shear moduli.
THEORY
Consider a borehole parallel to the X3-axis and its
cross-sectional plane parallel to the X1-X2- plane as
shown in Figure 2. Processing of dipole data acquired
by a transmitter aligned with the X1-axis yields the
shear modulus C55, whereas the other orthogonal
transmitter aligned with the X2-axis yields the shear
modulus C44. The Stoneley data is used to obtain the
shear modulus C66 in the borehole cross-sectional
(X1-X2) plane. Referred to an isotropically loaded
reference state, formation shear moduli in the three
orthogonal planes are the same (C44 = C55 = C66 =).
When this rock is subject to anisotropic incremental
stresses, changes in the three shear moduli can be
expressed as
, (1)
where C55 is obtained from the fast-dipole shear
slowness and formation bulk density, C55, Y
[=2(1+)], and are the shear modulus, Young’s
modulus, and Poisson’s ratio, respectively; and C144
and C155 are nonlinear constants referred to the
chosen reference state,
(2)
where C44 is obtained from the slow-dipole shear
slowness and formation bulk density at a given depth,
and C44 (= C55) is the shear modulus in the chosen
reference state.
(3)
where C66 is obtained from the Stoneley shear
slowness dispersion and formation bulk density at a
given depth, and C66 (= C44) is the shear modulus in
the chosen reference state.
DIFFERENCE EQUATIONS USING THE FAR-
FIELD SHEAR MODULI
A reservoir sand in the absence of formation stresses
and fluid mobility behaves like an isotropic material
characterized by a shear and bulk moduli. However, a
complex shaly-sand reservoir is characterized by
anisotropic elastic stiffnesses. Anisotropic elastic
stiffnesses and the three shear moduli are affected by
(a) structural anisotropy; (b) stress-induced
anisotropy; and (c) formation mobility. Structural
anisotropy caused by clay microlayering in shales is
described by transversely-isotropic (TI-) anisotropy
that exhibits the horizontal shear modulus C66 to be
larger than the vertical shear moduli C44=C55, in the
absence of any stress-induced effects. Shales are
impermeable and do not constitute part of a
producing reservoir. Since the effect of formation
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
3

stresses on the effective shear moduli in a sand and
shale interval are substantially different, it is
necessary to apply appropriate corrections to the
measured shear moduli in the estimation of formation
stress magnitudes.
The acoustoelastic theory relates changes in the
effective shear moduli to incremental changes in the
biasing stresses and strains from a reference state of
the material (Sinha, 1982; Norris et al., 1994). The
three shear moduli can be estimated from borehole
sonic data. With the recent introduction of algorithms
for the Stoneley radial profiling of horizontal shear
slowness (C66) and dipole radial profiling of vertical
shear slownesses (C44 and C55), we can
unambiguously estimate the virgin formation shear
moduli. These algorithms account for the sonic tool
bias and possible near-wellbore alteration effects on
the measured sonic data.
As described earlier, differences in the effective shear
moduli are related to differences in the principal
stress magnitudes through an acoustoelastic
coefficient defined in terms of formation nonlinear
constants referred to a chosen reference state and for
a given formation lithology. Next we assume that the
X1-, X2-, and X3-axes, respectively, are parallel to the
maximum horizontal (H), minimum horizontal (h),
and vertical (V) stresses. Under these circumstances,
equations (1)-(3) yield difference equations in the
effective shear moduli in terms of differences in the
principal stress magnitudes through an acoustoelastic
coefficient defined in terms of formation nonlinear
constants referred to a chosen reference state and for
a given formation lithology. The following three
equations relate changes in the shear moduli to
corresponding changes in the effective principal
stresses (Sinha et al., 2005):
(4)
(5)
(6)
where 33, 11, and 22 denote the effective
overburden, maximum horizontal, and minimum
horizontal stresses, respectively; and
(7a)
is the acoustoelastic coefficient, C55 and C44 denote
the shear moduli for the fast and slow shear waves,
respectively; C456=(C155-C144)/2, is a formation
nonlinear parameter that defines the acoustoelastic
coefficient; and μ represents the shear modulus in a
chosen reference state. However, only two of the
three difference equations (4), (5), and (6) are
independent.
The presence of unbalanced stress in the cross-
sectional plane of borehole causes dipole shear wave
splitting and the observed shear slowness anisotropy
can be used to calculate the acoustoelastic coefficient
AE from equation (6) provided we have estimates of
the three principal stresses as a function of depth.
Note that the dipole shear waves are largely
unaffected by the fluid mobility. We can then
estimate the stress-induced change in the Stoneley
shear modulus C66 using equations (4) and (5), and
the effective stress magnitudes V, H, and h at a
given depth.
When we have estimates of the minimum horizontal
and overburden stress magnitudes as a function of
depth, we can determine the acoustoelastic parameter
AE in terms of the far-field shear moduli C55 and C66
using the relation
, (7b)
where we assume that the effects of permeability on
these shear moduli are essentially similar and
negligible.
Once we have determined the acoustoelastic
parameter for a given lithology interval, we can
determine the maximum horizontal stress ΔSH
magnitude as a function of depth from the following
equation
(8a)
where C55 and C44 denote the fast and slow dipole
shear moduli, respectively. Similarly, the minimum
horizontal stress Sh magnitude as a function of depth
from the following equation
. (8b)
Hence, we can estimate formation horizontal stress
magnitudes as a function of depth in terms of the
three shear moduli C44, C55, and C66, and the
acoustoelastic coefficient AE.
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
4

ESTIMATION OF THE MAXIMUM
HORIZONTAL STRESS MAGNITUDE
Differences in the three shear moduli outside the
stress concentration annulus are related to differences
in the three principal stresses in terms of an
acoustoelastic coefficient referred to a local reference
state. There are two independent difference equations
that relate the effective overburden, maximum and
minimum horizontal stress magnitudes and the
acoustoelastic coefficient. These two equations can
be solved for the maximum horizontal stress
magnitude and acoustoelastic coefficient provided the
overburden and minimum horizontal stress
magnitudes are known from other sources. The
overburden stress is reliably known from the
formation bulk density. The minimum horizontal
stress can be reliably estimated from either a mini-
frac test or leak-off test and interpolated over a
reasonably uniform lithology. Therefore, we can use
equations (7b) and (8a) to calculate the maximum
horizontal stress magnitude at a given depth that
exhibits dipole dispersion crossover as an indicator of
stress-induced shear slowness anisotropy dominating
the data.
ESTIMATION OF STRESS MAGNITUDES IN
TI-SHALE
To estimate stress magnitudes in TI-shale using the
three shear moduli, it is necessary to compensate for
the structural anisotropy effects on the difference
between the Stoneley shear modulus C66 and dipole
shear modulus C44 or C55. Generally, shear modulus
C66 in the isotropic plane of a TI-shale is larger than
shear modulus C44 or C55 in the sagittal planes (X2-
X4 or X3-X1 planes). When we have an independent
estimate of TI-anisotropy from core data under
confining pressure, we can express structural
anisotropy induced increase in C66 in terms of the
Thomsen parameter . The ratio of C66/C44 can be
expressed as
(9)
If = 0.2, the ratio C66/C44 = 1.4. Under this situation,
we need to reduce the measured C66 by 40% before
inputting the shear modulus C66 together with the
shear moduli C44 and C55 into the stress magnitude
estimation algorithm using the three shear moduli
algorithm. Here we assume that any remaining
differences between C44, C55, and C66 are solely
caused by differences in the three principal stresses.
When the Thomsen parameter is not known, we
suggest that we run the stress magnitude estimation
algorithm for a range of C66 that covers possible
influence of TI-anisotropy effects. We can then plot
stress magnitudes as a function of parameter C66’/
C66, where C66 is the measured Stoneley shear
modulus at a chosen depth, and C66’ is the modified
shear modulus in a shale interval where C66’ < C66.
ESTIMATION OF HORIZONTAL STRESS
GRADIENT USING VELOCITY DISPERSION
GRADIENT (VDG) TECHNIQUE
Consider a vertical fluid-filled borehole parallel to
the X1-direction, and the maximum and minimum
horizontal stresses parallel to the X2- and X3-
directions, respectively. Triaxial formation stresses
with a vertical overburden stress as one of the
principal stresses can be decomposed into a
hydrostatically loaded isotropic reference and
perturbations in the three principal stresses ΔσV, ΔσH,
and Δσh as shown in Figure 3. Note that the mean
stress σV0 in the isotropic reference state is not known
at this point. However, we define this assumed state
from the measured compressional and horizontal
shear (obtained from the Stoneley data) velocities at
the chosen depth so that small perturbations in the
three principal stresses ΔσV, ΔσH, and Δσh, would
lead to the actual in-situ stresses at this depth. All of
these stresses in Figure 3 are far-field stresses beyond
any stress concentration annulus caused by the
presence of a borehole.
When the propagation medium is prestressed, the
propagation of small-amplitude waves are properly
described by equations of motion for small dynamic
fields superposed on a prestressed state. A
prestressed state represents any statically deformed
state of the medium caused by an externally applied
load or residual stresses. The equations of motion for
small dynamic fields superposed on a static bias are
derived from the rotationally invariant equations of
nonlinear elasticity by making a Taylor expansion of
the quantities for the dynamic state about their values
in the biasing (or intermediate) state (Sinha, 1982;
Norris et al., 1994).
When the biasing state is inhomogeneous, the
effective elastic constants are position dependent, and
a direct solution of the boundary value problem is not
possible. In this situation, a perturbation procedure
can readily treat spatially varying biasing states, such
as those due to radial and circumferential stress
distributions away from the borehole, and the
corresponding changes in the Stoneley and flexural-
wave velocities can be calculated as a function of
frequency (Norris et al., 1994; Sinha et al., 1995).
Referred to the statically deformed state of the
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
5

formation (or the intermediate configuration), we
employ the modified Piola-Kirchhoff stress tensor Pαj
as defined in Norris et al. (1994) in a perturbation
model that yields the following expression for the
first-order perturbation in the eigenfrequency m for
a given wavenumber kz,
where
(11)
(12)
(13)
(14)
(15)
In equations (10)-(15), we have used the Cartesian
tensor notation and the convention that a comma
followed by an index P denotes differentiation with
respect to the spatial coordinate XP. The summation
convention for repeated tensor indices is also
implied. Although hαjγβ exhibits the usual symmetries
of the second-order linear elastic constants, the
effective elastic stiffness tensor Hαjγβ does not have
these symmetries as is evident from equation (12).
The static strain EAB is expressed in terms of static
displacement gradient wA,B, whereas the
displacement gradient refers to the dynamic
displacement associated with the m-th eigenmode of
a fluid-filled borehole. The small field Piola-
Kirchhoff stress Pαj in the intermediate state can be
decomposed into two parts
(16)
where
(17)
with ΔPαj being defined by equations (11)-(15), and
the superscript “L” denoting the linear portion of the
stress tensor. The quantities cαjγβ and cαjγβAB are the
second-order and third-order elastic constants,
respectively. Generally, the second-order and third-
order elastic constants are written in Voigt
compressed notation whereby a pair of indices is
replaced by a single index that take on values from 1
to 6 following the notation: 11 1, 22 2, 33 3,
23 4, 13 5, and 12 6. In equations (10)-(15),
Tαβ, EAB, and wδ,γ denote the biasing stresses, strains,
and static displacement gradients, respectively. Note
that the biasing stress Tαβ in the propagating medium
is expressed in terms of the far-field formation
principal (effective) stresses (σV, σH, and σh) using
standard relations that account for stress
concentrations caused by the presence of a borehole.
In equation (16), ΔPαj are perturbations in the Piola-
Kirchhoff stress tensor elements from the linear
portion, , for the reference isotropic state, ρ0 is the
mass density in the reference state, represents the
eigensolution for a selected propagating mode in the
reference state. The index m refers to a family of
normal modes for a borehole in an effectively
isotropic reference state. The quantity ΔPW in
equation (12) denotes the pressure difference
between the wellbore and pore pressures. The
frequency perturbations Δ are added to the
eigenfrequency m for various values of wavenumber
along the borehole axis, kz, to obtain the final
borehole flexural dispersion in the presence of
prestress. Note that a fractional change in
eigenfrequency from a reference state is equal to a
fractional change in phase velocity at a given axial
wavenumber.
A general perturbation model defined by equation
(10) relates perturbations in the three principal
formation stresses (ΔσV, ΔσH, and Δσh) from a chosen
reference state to fractional changes in the borehole
flexural velocities measured at depth A, and at a
given wavenumber ki by
where the stress-coefficient of velocity
at a given wavenumber ki is expressed
in terms of the eigensolution of the borehole flexural
(or Stoneley) mode in the chosen reference state and
three formation nonlinear constants c111, c144, and c155
(Sinha, 2006). Similarly, we have another equation
for depth B in the same lithologic interval that allows
us to use the same formation linear and nonlinear
constants and attribute fractional changes in
and to corresponding
changes in and ,
respectively. When the horizontal stresses are nearly
the same and we do not observe any shear wave
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
6

splitting, we set at all depths
within the interval. Using a nonlinear least-squares
minimization of the cost function, we solve for the
formation three nonlinear constants and the
difference in the effective horizontal stress
in this chosen interval (Sinha, 2006). This
difference in the effective horizontal stress between
two depths yields the horizontal stress gradient in the
chosen interval.
ESTIMATION OF SHmax USING THREE
SHEAR MODULI
We illustrate an application of the algorithm to
estimate the maximum horizontal stress magnitude in
a reservoir interval using the three far-field shear
moduli. The procedure for the estimation formation
stress magnitudes consists of the following steps:
1. Construct a stratigraphic map of grain versus
clay supported facies using gamma ray, and
elemental analysis (ELAN) of minerals as a
function of depth.
2. Construct a Mechanical Earth Model
(MEM) that provides estimates of the
overburden stress, minimum horizontal
stress, and pore pressure as a function of
depth.
3. Identify depth intervals with crossing dipole
dispersions as indicators of stress-induced
anisotropy dominating the data.
4. Estimate the three far-field shear moduli
using radial profiles of the dipole shear and
Stoneley shear slownesses.
5. Invert differences in the three far-field shear
moduli for the maximum horizontal stress
magnitude.
6. Check consistency of the estimated
formation stress magnitudes together with
wellbore pressure and estimated rock
strengths by comparing Well Bore Stability
(WBS) predictions and evidence of available
breakout and caliper data.
Consider a US onshore well where a complete suite
of logs were obtained in a moderately fast formation.
This well is nearly vertical and intervals with larger
quartz volume exhibit dipole dispersion crossovers
indicating stress-induced anisotropy dominating the
data. Figure 4 shows a composite log with an
elemental analysis in the first track that highlights
intervals with larger volumes of quartz than clay. The
second track shows the gamma ray log and
stratigraphy that delineates the clay and grain
supported facies. The third track shows the wellbore
deviation and formation bulk density. The fourth
track displays the three shear moduli obtained from
the processing of the monopole Stoneley and dipole
sonic data. The fifth track contains the estimated
maximum horizontal stress magnitude together with
the minimum horizontal stress and overburden stress
magnitudes and pore pressure obtained from the
initial MEM. We analyze variations in the maximum
to minimum horizontal stress ratio and use an
average value in a given lithology interval.
Figures 5a and 5b display the Stoneley and cross-
dipole dispersions at two typical depths in sand
intervals. These three dispersions are used to obtain
the three far-field shear moduli at a given depth.
Figure 6 displays the Wellbore Stability (WBS)
predictions using the estimated formation stress
magnitudes and a possible range of wellbore
pressures generated by the drilling process.
Predictions of wellbore failures are consistent with
the observed borehole breakouts in the formation
image (FMI) logs and caliper data in the last two
tracks.
ESTIMATION OF HORIZONTAL STRESS
GRADIENT USING VDG
Next we describe an illustrative example of the VDG
algorithm for the estimation of horizontal stress
gradient using dipole dispersions at two depths in a
reasonably uniform lithology interval. This algorithm
is used for estimating the horizontal stress gradient in
depth intervals in a nearly vertical well that do not
exhibit dipole shear slowness anisotropy implying
that the maximum and minimum horizontal stresses
are nearly the same. The procedure for the estimation
of horizontal stress gradient in a chosen depth
interval consists of the following steps:
1. Construct a stratigraphic map of grain versus
clay supported facies using gamma ray, and
elemental analysis (ELAN) of minerals as a
function of depth.
2. Construct a Mechanical Earth Model
(MEM) that provides estimates of the
overburden stress and pore pressure as a
function of depth.
3. Identify depth intervals with reasonably
uniform lithology that do not exhibit any
shear wave splitting and where the two
cross-dipole dispersions overlay at any
depth.
4. Assume that observed differences in dipole
dispersions at the top and bottom of the
chosen interval are primarily caused by
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
7

differences in the overburden and horizontal
stresses.
5. The algorithm inverts differences in dipole
dispersions at two depths in a uniform
lithology interval for the horizontal stress
gradient.
6. Estimate an average value of the horizontal
stress gradient in a given lithology interval.
Figure 7 displays a typical output from the Velocity
Dispersion Gradient (VDG) algorithm. The first track
shows a stratigraphy map together with a gamma ray
log. The second track contains the well deviation,
caliper and formation bulk density as a function of
depth. The third track displays the compressional and
shear slowness logs. Notice that depth intervals that
exhibit gradients in both the compressional and shear
slownesses are good candidates for estimating the
horizontal stress gradient using the VDG algorithm.
Generally, both the Stoneley and dipole flexural
dispersions exhibit differences at two depths over
large bandwidths. However, dipole dispersions at
low frequencies are largely sensitive to the far-field
horizontal and overburden stresses. Figure 8a and 8b,
respectively, display measured differences in the
Stoneley and dipole dispersions at two depths in a
shale and sand intervals. We have used 20 different
depth pairs for each lithology interval and an average
of these 20 gradients is used in the chosen interval
after excluding any obvious outliers.
If horizontal stress gradients in similar lithology
intervals are nearly the same over the entire depth of
the well, we can estimate the horizontal stress
magnitude by multiplying the horizontal stress
gradient with the true vertical depth.
Figure 9 summarizes predictions from a WBS model
using stress magnitudes obtained from the new VDG
algorithm. The first track contains the stratigraphy
map together with the gamma ray log. The second
track displays the overburden, pore pressure, and
horizontal stress magnitude and direction (azimuth
from the North). The third track contains the Biot
parameter, friction angle, static Poisson’s ratio,
tensile strength and the unconfined compressive
strength (UCS). The fourth and fifth tracks highlight
depth intervals where different types of drilling
induced failures are expected for the wellbore
pressure assumed. The sixth and seventh tracks show
the caliper logs as indicators of breakouts at various
depths. We observe that the MEM and WBS
predictions shown in Figure 9 agree well with
observed breakouts in the upper interval (above X600
ft) using both the new and a standard horizontal stress
magnitude estimation technique. However, WBS
predictions in the lower interval (below X600 ft)
using stresses from the new VDG algorithm agree
with drilling induced failures, whereas predictions
using stress estimates from a conventional technique
fail to predict the observed failures.
SUMMARY AND CONCLUSIONS
We have presented two new algorithms for
estimating formation stress magnitudes using
borehole sonic data. The first algorithm estimates the
maximum horizontal stress magnitude using the three
shear moduli in a sand reservoir that exhibits dipole
dispersion crossovers as an indicator of stress-
induced anisotropy dominating the data. The
overburden stress, pore pressure and minimum
horizontal stress obtained from other sources, such as
the mini-frac, or extended leakoff tests (XLOT), are
input to this algorithm. The second algorithm,
referred to as the Velocity Dispersion Gradient
(VDG) method inverts differences in dipole
dispersions at two depths in the same lithology
interval for the horizontal stress gradient. This
algorithm is used in depth intervals that exhibit no
shear wave splitting implying that horizontal stresses
are nearly isotropic.
Predictions from wellbore stability models are in
better agreement with drilling induced borehole
failures for the assumed wellbore pressures using
formation stress magnitudes obtained from these new
algorithms.
REFERENCES
Bratton, T., Bricout, V., Lam, R., Plona, T., Sinha,
B., Tagbor, K., Venkitaraman, A., and Borbas, T.,
“Rock strength parameters from annular pressure
while drilling and dipole sonic dispersion analysis”,
Transactions, 45th
Annual Logging Symposium,
SPWLA, Noordwijk, Norway, June 6-9 (2004).
Desroches, J., and Kurkjian, A., “Applications of
Wireline Stress Measurements”, SPE 48960 (1998).
Gough, D.I., and Bell, J.S., 1982, Stress orientations
from borehole well fractures with examples from
Colorado, East Texas, and Northern Canada, Can. J.
Earth Sci., vol. 19, 1358-1370.
Moos, D., and Zoback, M.D., 1990, Utilization of
observations of wellbore failure to constrain the
orientation and magnitude of crustal stresses:
Application to continental, deep sea drilling project
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
8

and ocean drilling program boreholes, J. Geophys.
Res., 95, 9305-9325.
Norris, A. N., Sinha, B. K., and Kostek, S., 1994,
Acoustoelasticity of solid/fluid composite systems,
Geophys. J. Internat., 118, 439-446.
Nur, A., and Byerlee, J.D., 1971, An exact effective
stress law for elastic deformation of rock with fluids,
J. Geophys. Res., 76, 6414-6419.
Raaen, A.M., Horsrud, P., Kjorholt, H., and Okland,
D., "Improved routine estimation of the minimum
horizontal stress component from extended leak-
off tests," International Journal of Rock Mechanics &
Mining Sciences 43 (2006) 37-48.
Roegiers, J-C., 1989, Elements of rock mechanics, in
Reservoir Stimulation, Chap. 2, eds. M.J.
Economides and K.G. Nolte, Prentice Hall,
Englewood Cliffs, New Jersey.
Sinha, B.K., “Elastic waves in crystals under a bias”,
Ferroelectrics, 41, (1982) 61-73.
Sinha, B. K., Kane, M. R., Frignet, B., and Burridge,
R., “Radial variations in cross-dipole slownesses in a
limestone reservoir”, 70th
Ann. Internat. Mtg., Soc.
Expl. Geophys., (2000) Expanded Abstract.
Sinha, B. K., 2002, Determining stress parameters of
formations from multi-mode velocity data, U.S.
Patent Number 6,351,991, March 5.
Sinha, B. K., 2006, Determination of stress
characteristics of earth formations, U.S. Patent
Number 7,042,802, B2, May 9.
Sinha, B. K., Vissapragada, B., Renlie, L., and
Skomedal, E., 2005, Horizontal stress magnitude
estimation using the three shear moduli – A
Norwegian Sea case study, SPE 103079
Vernik, L., and Zoback, M.D., “Estimation of
maximum horizontal principal stress magnitude from
stress-induced well bore breakouts in the Cajon Pass
Scientific Research Borehole,” J. Geophys. Res.,
97(B4), (1992) 5109-5119.
Walsh, J.B., 1965, The effect of cracks on the
compressibility of rock, J. Geophys. Res., 70(2), 381.
Zoback, M.D., Moos, D., and Anderson, R.N.,
“Wellbore breakouts and in-situ stress,” J. Geophys.
Res., 90 (1985), 5523-5530.
ABOUT THE AUTHORS
Bikash Sinha is a Scientific Advisor at
Schlumberger-Doll Research. Since joining
Schlumberger in 1979, he has contributed to many
sonic logging innovations for geophysical and
geomechanical applications, as well as development
of high precision quartz pressure sensors for
downhole measurements. He is currently involved in
the near-wellbore characterization of mechanical
damage and estimation of formation stress
parameters using borehole sonic data. Bikash has
received a B.Tech. (Hons.) degree from the Indian
Institute of Technology, and a M.A.Sc. degree from
the University of Toronto, both in mechanical
engineering, and a Ph.D. degree in applied mechanics
from Rensselaer Polytechnic Institute, Troy, NY. He
has authored or coauthored more than 150 technical
papers and received 25 U.S. Patents. An IEEE fellow,
he received the 1993 outstanding paper award for an
innovative design and development of quartz
pressure sensor published in the IEEE Transactions
on UFFC.
Wang Jing is a Geomechanics Project Engineer at
Schlumberger Beijing Geoscience Center,
participating as a petroleum technical person in
software development. Since joining Schlumgerger in
2001, she has contributed to developing several
geomechanics software for sand completion selection,
sand management, 1D mechanical earth model,
wellbore stability analysis, stress induced events
(breakout, fault slippage) identification, and stress
regime analysis. Since 2003, she has also been
working on Sonic Scanner applications for
geomechanics in optimized perforation, strength
estimation, and stresses estimation. Wang Jing
received her bachelor degree in 2001 from the
Department of Mechanics and Engineering Science,
Peking University.
Saad Kisra is Sonic Scanner Product Champion for
Schlumberger Wireline since 2007. He joined
Schlumberger technology center in Japan in April
2001 where he contributed to developing next-
generation sonic tool and products. In 2005, he
moved to Houston as geomechanics consultant for
Schlumberger Data & Consulting Services. He was
involved in several products related to drilling &
completion optimization for oil and gas operators
operating in the Gulf of Mexico. He received his B.
Eng. and M.Eng. in EEE from Tokyo Institute of
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
9

Technology in 1999 and 2001, respectively. He is a
member of IEEE, SPE and SEG.
Li Ji is the Manager of borehole geomechanics group
at the Schlumberger Beijing Geoscience Center, for
the development of several geomechanics software:
Sonic Scanner for geomechanics, single well
geomechanics workflow and stress regime analysis.
Before assuming her current position in 2005, she
had been working on software development of cased
hole formation evaluation, true resistivity modeling
and inversion, and on an application development
platform for E&P. Li Ji has received her B.S. (1997)
and M.S. (2000) in Computer Science from North
Eastern University, P.R.China.
Vivian Pistre is a Principal Engineer at
Schlumberger. He has an engineer degree in
Computer Sciences from ENSEEIH Toulouse, France
and holds a DEA in Artificial Intelligence from the
University of Sciences, Toulouse, France. He joined
Schlumberger in 1982 as a wireline field operation
engineer and has since held several positions for
wireline operations, log interpretation, LWD
operations and engineering. He is currently manager
of various software engineering projects at
Schlumberger BGC in Beijing, China. He is a
member of SPWLA, SEG, SPE and EAGE.
Tom Bratton is a Scientific Advisor for
Schlumberger in Denver, Colorado. He is currently
developing solutions for geomechanical related
drilling and completion operations. Tom began his
career with Schlumberger in 1977 as a field engineer
in Grand Junction, Colorado. He has held various
staff, management and interpretation positions with
the wireline, drilling and measurements, well services,
and data and consulting services, specializing in
petrophysics, acoustic analysis and geomechanics. He
has an MS degree in atomic physics from Kansas
State University and is a member of SPE, SPWLA
and ARMA. ([email protected])
Michael Sanders is a Principal Geophysicist with
Schlumberger in Ho Chi Minh City. He graduated
from the University of Western Australia with a B.Sc.
degree in Physics, and later from the Western
Australian Institute of Technology with a Grad. Dip.
App. Sc. (Geophysics). After graduating, he worked
for 4 years as a field geophysicist for mineral
exploration in Australia. Since joining Schlumberger
in 1985, he has worked as a wireline logging
engineer and a geophysicist. Regions of work with
Schlumberger include Australia, Indonesia, Malaysia,
China, Thailand, Vietnam, Germany, Oman and
Kuwait. Areas of specialty include sonic logging and
borehole seismic acquisition, processing and
interpretation. He is a member of the SEG and SPE.
Cai Jun is in-charge of wireline logging for CNOOC.
Figure 1. Applications of formation stresses in well
planning, wellbore stability and reservoir
management.
Figure 2. Schematic of a borehole in the presence of
formation principal stresses.
Figure 3. Decomposition of formation stresses in the
far-field away from the borehole into a
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
10
hydrostatically loaded reference and perturbations in
the three principal stresses.
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
11

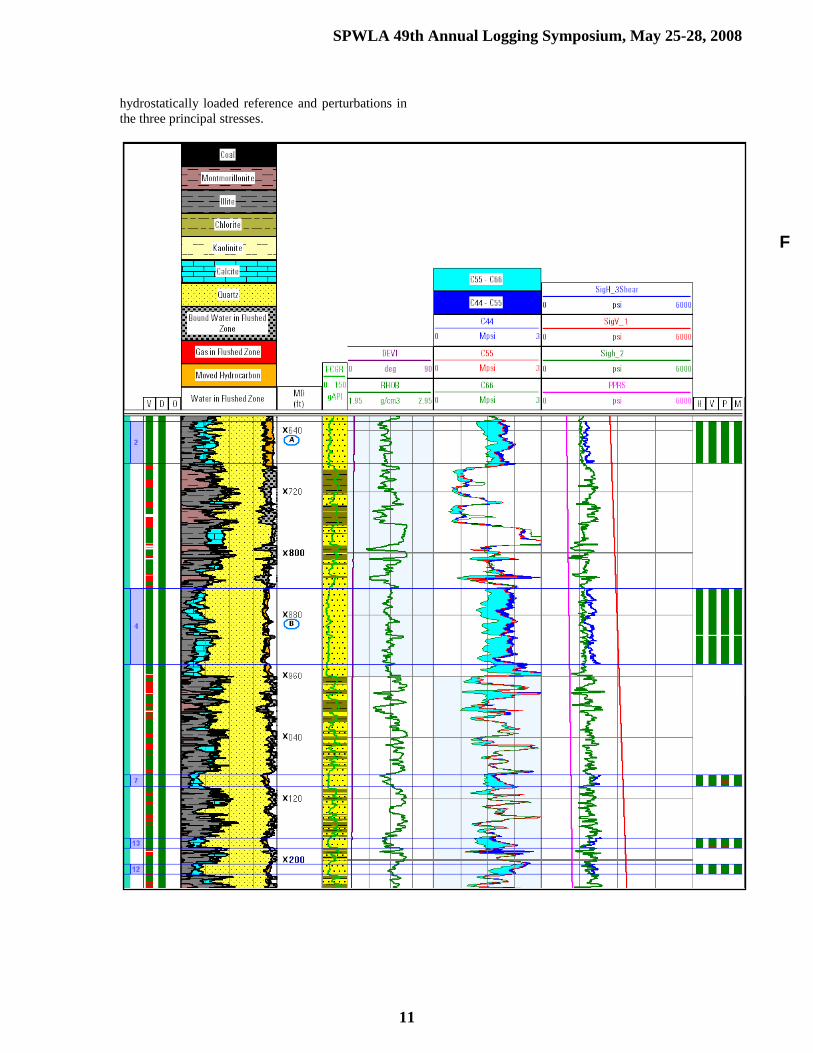
Figure 4. Composite logs of elemental analysis (ELAN), gamma ray, borehole deviation, formation bulk density, the
far-field shear moduli, the overburden, maximum and minimum horizontal stresses, and pore pressure.
Figure 5a. Measured borehole dispersions together with theoretical dispersions for an equivalent isotropic and
radially homogeneous formation at depth A (marked in Figure 4). The red and blue markers denote the fast and slow
dipole dispersions, respectively. The cyan markers represent the Stoneley dispersion.
Figure 5b. The notation is the same as in Figure 5a. Results are for depth B (marked in Figure 4) in a sand reservoir.
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
12
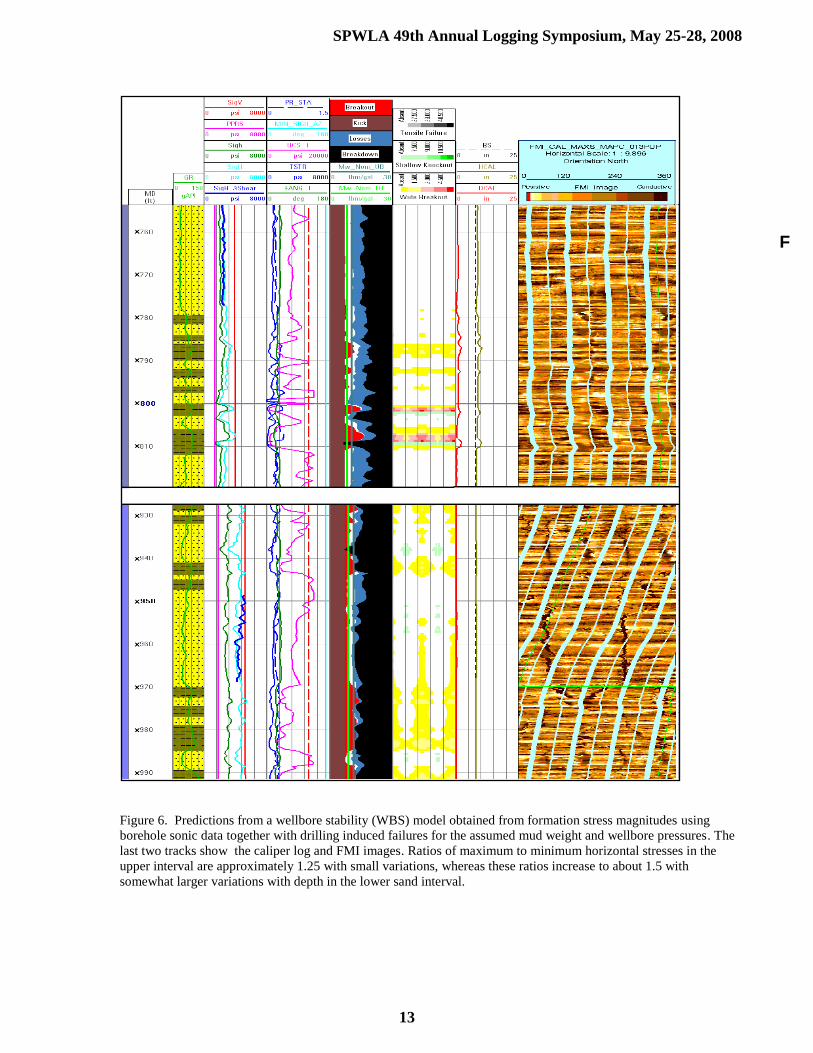
Figure 6. Predictions from a wellbore stability (WBS) model obtained from formation stress magnitudes using
borehole sonic data together with drilling induced failures for the assumed mud weight and wellbore pressures. The
last two tracks show the caliper log and FMI images. Ratios of maximum to minimum horizontal stresses in the
upper interval are approximately 1.25 with small variations, whereas these ratios increase to about 1.5 with
somewhat larger variations with depth in the lower sand interval.
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
13

Figure 7. Composite logs of gamma ray, wellbore deviation, calipers, formation bulk density, compressional and
shear slownesses, overburden stress, pore pressure, and estimated horizontal stress gradients in various lithology
intervals using the VDG technique
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
14

Figure 8a. Measured borehole dispersions at depths C1 and C2 (marked in Figure 7) in a clay-dominated interval.
The orange and green markers denote the best curve fits to measured dipole dispersions at these two depths. The
cyan and brown markers represent the Stoneley dispersions at the two depths.
Figure 8b. The notation is the same as in Figure 8a. Results are for depths D1 and D2 (marked in Figure 7) ft in a
sand interval.
F
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
15

Figure 9. Predictions from a WBS model obtained from formation stress magnitudes from the VDG algorithm using
borehole sonic data show improved agreement with observed drilling-induced failures in the bottom interval than
was the case with stress magnitudes obtained using an existing estimation technique. The last two tracks show the
caliper logs delineating breakout intervals.
SPWLA 49th Annual Logging Symposium, May 25-28, 2008
16





























