Embed Size (px)
Citation preview

Estimating COMPASS Orbits And Clocks And Applying To Real-Time Precise Positioning Services
Maorong Ge([email protected]), Hongping Zhang, Xiaolin Jia, Shuli Song, and Jens Wickert
German Research Centre for GeosciencesGNSS Research Center, Wuhan UniversityXi’an Research Institute for Surveying And MappingShanghai Astronomical Observatory
Munich Satellite Navigation Summit, 13-16 March 2012, Munich, Germany

Motivation
COMPASS Constellation
WHU Tracking Network
EPOS-RT Software
Precise Orbit And Clock Estimation
Applying to Positioning And GPSMET
Real-time Precise Positioning Service
Summary
Contents

Three Phases:Phase I :Demonstration System, 2000
Phase II: Regional System, 2012
Phase III: Global System, 2020
What Can Be Achieved With Current COMPASS Constellation?
Motivation

COMPASS Constellation
Five GEOs:
Inclination 0º,longitudes: 60ºE to 160ºE, Altitude 36,000 km.
27 MEOs:
In 3 orbital planes,
Inclination 55.5º,
Altitude 21,500 km.
Three IGSOs.

COMPASS Constellations
Space Segment (Constellation)Phase II: 5 GEOs + 5 IGSOs + 4 MEOs
Phase III: 5 GEOs + 3 IGSOs + 27 MEOs
Current Constellation (Sept. 2011)3 GEOs + 4 IGSOs (Data available)

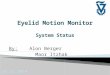
Tracking Network (Wuhan Uni)
A Global GNSS Network Dedicated To COMPASS Scientific Research
Data Available At Stations:
Beijing, Wuhan, Chengdu, Lasha, Shanghai, Urumuqi and Xi’an, Singapore and Perth Australia

Tracking Network (Wuhan Uni)

UR240
UA240BD/GPS四频OEM接收机
Recevier And Antenna

Data Availability
bj f1 cent chdu lasa pert sha1 sigp urmq xian 240 o - o - o o o - - 241 - o o - o o o - - 242 o o o - o o - - 243 o o o - o o o - - 244 o o o o o - o o - 245 o o o o o - o o - 246 - o o o o - o o - 247 - o o o o - o o - 248 - o o o o o o o o 249 - o - o o o o o o 250 o o - o o o o o o 251 o o - o o o o o o 252 o o o o o o o o o 253 o o o o o o o o o 254 o o o o o o o o o 255 o o o o o o o o - 256 o - o o o o o o - 257 o o o o o o o o o 258 - o o o o o o o - 259 o o o o o o o o o 260 o o o o o o o o o 261 o o o o o o o o o 262 o o o o o o o o - 263 o o o o o o o o - 264 o o o o o o o o - 265 o o o o o o o o - 266 o o o o o o o o - 267 o o o o o o o o - 268 o o o o o o o o -

EPOS-RT Software
Multi-TechnologyMulti-TechnologyGGNSS SLR NSS SLR VLBI VLBI ……
Multi-FunctionMulti-FunctionReal-time/Post-mission; Real-time/Post-mission; Static/Kinematic/Dynamic Static/Kinematic/Dynamic

EPOS-RT: Structure
Left Side: Post-Processing. Right Side: Real-Time

Data Processing
POD& PTDPOD& PTD
Real-Time PPP serviceReal-Time PPP service

Dynamical ModelsParameter COMPASS Satellite
Gravity EIGEN GRACE02S 12 x 12
Point mass Earth, Sun, Moon and Planets
Tides Solid Earth tidesPole tidesOcean tide
Relativistic effects Yes
Solar radiation Bern model with 9 model parameters
Velocity Breaks Only for maneuver modelling
Satellite Attitude: As GPSPCO/PCV: Not Available

Observation ModelsParameters Model Constraint
Observation LC and PC L1 0.02cycle, P1 1.0m
Sampling rate 60 seconds
Cutoff elevation 7 degree
Weight Elevation dependent elev > 30o, 1; else 2*sin(elev)
PCO/PCV Not available
Phase wind-up Yes
Tropospheric delay Saastamoinen model + process 10cm + 5 mm/sqrt(hour)
Ionospheric delay Eliminated by using LC and PC
Satellite clock Broadcast + Wite noise 300 m
Receiver clock Range estimating + White noise 300 m
Station displacement
Solid earth, pole tide, ocean loading
Station coordinate Constraint to GPS derived value Accordingly
Ambiguity Estimated and fixed to integer
Relativistic effects Yes
ERP Solve for x-pole y-pole and rates and LOD
Almost fixed

Three-Day Solution
Three-Day Sliding Window With One-Day Step-size. Orbit Overlap 48 h, Sol. 1 and 2, or Sol 2 and 3 24 h, Sol. 1 and 3, or Sol 2 and 4 1 h, Sol. 1 and 4 (Blue parts)
Estimation (Green), Predicted (Blue)
Sol. 1
2
3
4

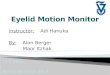
Orbit Comparison
RMS increases along with time-lag GEO has significant larger RMS On average GEO 6 m, IGSO 1 m
Time-lag of
the solutions

Large RMS in Along- Tracking, 23 m
Constant Bias ! < 1 m in Cross-Tracking
& Radial
(Unit dm) Along Cross Radial 3D C01 233 7 18 234 C03 81 1 23 84 C04 177 3 24 179 C06 14 13 4 20 C07 18 9 13 24 C08 32 8 14 36 C09 15 8 5 18 Mean 81 7 14 83
Orbit Comparison

Systematic Bias Except C04Orbit Related ?STD 0.5 ns (15 cm)
Clock Comparison

• ZTD RW process with PD• Better than 10 mm in Horizontal• 4 cm bias in vertical, 1-2 cm STD
Static PPP With Estimated Orb&CLK

• MEAMGPS-COMPASS = -13 mm, STD=14 mm
• Both PCO&PCV for Sat. and Rec. not available
ZTD Estimated vs GPS Derived

Position: 100 m + 1 m per sqrt (minute)Epoch not shown if nsat <=4 After 1-2 hour to 1 dm, Stay at cm-levelFluctuation at 20:00, repeated daily (?)
Kinematic PPP (Forward)

Epoch not shown if nsat <=4 Bias 12, 6, -8 mm, STD 45, 27. 74 mm (ENU) Fluctuation at 20:00 ?
Kinematic PPP (+Backward)
East North Up
Mean 0.012 0.006 -0.008 STD 0.045 0.027 0.074

EPOS-RT For Real-Time PPP Service
RT Orbit
RT Clock
RT PPPGPS receivers
SRIF(Orb)
BNC BNC2SRIF SRIF(Clk)
SRIF2BNS
BNC2SRIF SRIF(PPP)
Intern
et con
nectio
n
Co
ntro
l Un
it
IGS Hourly DataIGS Hourly Data
RT PPPGPS receivers
BNC2SRIF SRIF(PPP)
OBS StreamingOBS Streaming
NTRIP ProductsNTRIP Products
NTRIP ProductsNTRIP Products ORB/CLK/UPDORB/CLK/UPD
Hourly DataHourly Data RT ORBRT ORB
Pos&Time
ZTD/STD
Pos&Time
ZTD/STD
Co
ntro
l Un
it
IGS Real-Time Analysis Center at GFZ

Orbit Prediction
Three-Day Sliding Window With One-Day Step-size. Orbit Integration To The Fourth Day (1D Pred.) The Step-size Can Be To 1 h For A Faster Update
depending on the data availability
Prediction (Green with Data, Yelllow=Predicted

Compared With Estimated OrbitsMajor Bias in Along-track Direction,
Especially for GEOsSTD Are Similar, Smallest in Radial.
Quality of Predicted Orbits

Clocks are estimated epoch-wise by fixing the predicted orbits. Both clocks&orbits are used for simulated real-time positioningURA should be compared
Quality of Estimated Clocks

Simulated Real-Time PPP
Very similar to that with estimated orbits&clocks
Decimeter accuracy achievable
Fluctuation at 20:00 ?

• 3D-rms 16 m for GEOs and 2.4 m for IGSOs. Large bias in along-track, small and similar errors in radial of 1.8 m for GEO and IGSO.
• Static Daily PPP: 1 cm/3cm, Bias due to PCO/PCV
• Kinematic PPP: 5, 3 and 7 cm in ENU
• Simulated RTPPP service: 1-2 dm.
• To be improved with the full constellation of Phase II.
Summary