Embed Size (px)
DESCRIPTION
a
Citation preview

J.L. Pons et al. (Eds.): Converging Clinical & Engi. Research on NR, BIOSYSROB 1, pp. 747–751. DOI: 10.1007/978-3-642-34546-3_121 © Springer-Verlag Berlin Heidelberg 2013
Estimate of Lower Trunk Angles Using Gyroscope Data in Pathological Gait*
E. Grimpampi1,**, V. Bonnet1, A. Taviani2, and C. Mazzà1
1 Department of Human Movement and Sport Sciences of the University of Rome “Foro Italico” [email protected] 2 Dipartimento della Riabilitazione, Asl 11 Empoli, Italy
Abstract. This paper proposes a method based on the use of a Weighted Fourier Linear Combiner (WFLC) for the estimate of lower trunk angles during pathological overground level walking using the angular velocities measured at lower trunk level. The method was validated in a group of 12 patients, 6 with hemiplegia and 6 with Parkinson’s disease, by comparing the estimated angles to those simultaneously measured with a stereophotogrammetric system. The results proved that the method is highly accurate in estimating both pitch, roll, and yaw angles.
1 Introduction
Trunk mobility impairment can cause gait, balance and postural problems. In patients with stroke, restoration of normal movements of the trunk and pelvis while walking is a primary goal for ensuring the patient rehabilitation [1]. Attention is given to the upper body movements also in patients with Parkinson’s disease, in which axial rigidity is an evident incapacitating trait responsible for abnormal walking. Consequently, a quantitative assessment of the trunk kinematics can be of great support for a therapist [2].
A number of quantitative methods have been proposed for the assessment of trunk mobility and of related impairments, based on 3D upper body kinematics measurements [3,4] or on simpler angular velocity and/or linear acceleration related parameters, as obtained with inertial measurement units (IMUs) [5]. IMUs have gained in popularity thanks to their ease-of-use, robust design, small dimensions and relatively low cost. An IMU normally includes accelerometers and gyroscopes to measure three acceleration and angular velocity components, respectively. The additional use of magnetometers allows to compensate for drift related integration errors that limit the possibility to determine an IMU position and orientation in space by double and single integration of the acceleration and *
This work was part of the project “SIVAM - Wearable Sensors for Motor Ability Evaluation” funded in the framework of the MISE-ICE-CRUI 2010 agreement.
** Corresponding author.

748 E. Grimpampi et al.
angular velocity signals, respectively. Unfortunately, the effectiveness of the magnetometers is limited by their high sensitivity to magnetic disturbances [6]. Alternative solutions have been proposed, using a Kalman filter approach for the estimate of the sensor orientation without using the magnetometer data, but they accurately estimate only two of the three orientation angles [7].
Recently, a data processing procedure that compensates for the above-mentioned drift and provides an optimal estimation of the 3-D instantaneous orientation of the IMU and, therefore, of the body segment that it is attached to has been proposed [8]. This procedure is based on the use of a WFLC adaptive filter and requires only the measurement of three angular velocities as provided by three orthogonally mounted gyroscopes [9]. The aim of this paper is to test its suitability for the estimate of lower trunk angles during overground level walking in patients with different pathologies starting from gyroscope data measured at lower trunk level.
2 Materials and Methods
The proposed method is based on the tracking of the three measured angular velocity components (performed by identifying the corresponding Fourier series coefficients using the WFLC) followed by an analytical integration of the identified Fourier series, which provides the sought estimate of the three orientation angles.
A detailed description of the WFLC method can be found in [8,9], where its effectiveness in reconstructing the 3D orientation of an IMU located on the lower trunk of young healthy subjects during treadmill walking has been shown [8,10]. In particular the method provided accurate angle estimations during motions including phases at variable speed and also for prolonged data recordings.
The WFLC input is the angular velocity signal as measured at an instant of time k. Depending on the instantaneous difference between the measured and estimated signals, the Fourier series coefficients that will represent the measured signal at time k+1 are computed. This result is obtained by adjusting, at each iteration, the so-called filter weights, using a least mean squares algorithm.
2.1 Experimental Procedures
Twelve older individuals (8 males; age: 73±6 years; stature: 1.63±0.08 m; mass: 75±9 kg) participated in the study after having signed an informed consent. Six of them suffered from hemiplegia and six from Parkinson’s disease. They were asked to walk at self-selected speed along a 12 m rectilinear pathway. One IMU (Freesense, Sensorize srl, 100 samples/s), positioned over the lower lumbar spine of each participant by a waist belt, was used to acquire 3 angular velocity components in its reference frame (unit local frame, ULF). In addition, three 15 mm diameter retro-reflective markers were attached to the unit case and used to define a marker-cluster local frame (MLF). The marker trajectories were reconstructed using a stereophotogrammetric system (Vicon 612, 100 frame/s, 6 cameras).

Estimate of Lower Trunk Angles Using Gyroscope Data in Pathological Gait 749
Pitch, roll and yaw angles, describing the orientation of the ULF were estimated from the IMU data using the WFLC approach (estimated) and those describing the orientation of the MLF were reconstructed using photogrammetric data (reference). Pitch, roll and yaw angles were associated to the lower trunk frontal and lateral bending and axial rotation, respectively. To compare the estimated and reference angles, the time-invariant offset of the MLF orientation relative to the ULF orientation was mathematically removed through a rigid transformation while the subject was standing still.
2.2 Assessment of the Estimates Accuracy
The accuracy of the estimated angles was assessed by comparing them to the reference values by computing the root mean square difference (RMSD), and the correlation coefficients (r) between the corresponding angle time histories, together with the offset values (computed as the difference between the mean values of the corresponding angles). These values were computed only for the part of the trial in which the stereophotogrammetric instrumental error was less than 1 deg. As a consequence, the number of investigated gait cycles varied from subject to subject.
3 Results
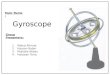
As it can be seen from Fig. 1, the algorithm provided reliable estimates for all the 3 angles of interest.
Fig. 1 Estimated (red lines) versus reference (black lines) angles as recorded during 1 trial of a randomly selected patient with Parkinson’s disease
The average RMS, r and offset values for all subjects are reported in Table 1. All the investigated angles were estimated with average correlation coefficients of about 0.80 (with the highest values found for the roll angle). An average offset of less than 2.5 deg was found, with the lowest values observed for the roll angle. The average RMS was lower than 1 deg for the pitch and roll angles and of 1.5 deg for the yaw angle.
-5
0
5
Pitc
h [d
eg]
-2
0
2
Rol
l [de
g]
0 0.5 1 1.5 2 2.5 3-5
0
5
Yaw
[deg
]
Time [s]

750 E. Grimpampi et al.
Table 1 Accuracy of the angles Estimates
Angle (deg)
RMS (deg)
r OFFSET
(deg)
Roll 0.6±0.2 0.85±0.11 1.3±0.8 Pitch 0.8±0.4 0.79±0.17 1.3±1.1 Yaw 1.4±0.6 0.78±0.18 2.3±1.6
4 Discussion
The WFLC method was shown to be accurate in providing a drift-less estimate of the 3 lower trunk angles during pathological overground level walking. These results are particularly satisfactory considering that the signals were available during short intervals of time, due to the limits imposed by the stereophotogrammetric system. The WFLC approach, in fact, is well known to perform at its best when longer lasting signals are processed.
No evident differences were observed between the two investigated pathologies, but a larger number of subjects is needed to confirm this hypothesis.
5 Conclusion
The WFLC is a promising tool for the estimate of the lower trunk lateral and sagittal bending and axial rotation angles using only the measurement of angular velocity data. Acknowledgment. The support by Gabriele Paolini and John McCamley during the experimental sessions is gratefully acknowledged.
References
[1] Franco, C.R., Leão, P., Townsend, R., Rieder, C.R.: Reliability and validity of a scale for measurement of trunk mobility in Parkinson’s disease: Trunk Mobility Scale. Arq. Neuropsiquiatr. 69, 636–641 (2011)
[2] Tyson, S.F.: Trunk kinematics in hemiplegic gait and the effect of walking aids. Clin. Rehabil. 13, 295–300 (1999)
[3] Mündermann, A., Mündermann, L., Andriacchi, T.P.: Amplitude and phasing of trunk motion is critical for the efficacy of gait training aimed at reducing ambulatory loads at the knee. J. Biomech. Eng. 134, 011010 (2012)
[4] Leardini, A., Biagi, F., Belvedere, C., Benedetti, M.G.: Quantitative comparison of current models fortrunkmotion in human movement analysis. Clin. Biomech. 24, 542–550 (2009)
[5] Reininga, I.H., Stevens, M., Wagenmakers, R., Bulstra, S.K., Groothoff, J.W., Zijlstra, W.: Subjects with hip osteoarthritis show distinctive patterns of trunk movements during gait-a body-fixed-sensor based analysis. J. Neuroeng. Rehabil. 20, 9:3 (2012)

Estimate of Lower Trunk Angles Using Gyroscope Data in Pathological Gait 751
[6] Kemp, B., Janssen, A.J.M.W., van der Kamp, B.: Body position can be monitored in 3D using accelerometers and earth-magnetic field sensors. Electroencephalogr. Clin. Neurophysiol. 109, 484–488 (1998)
[7] Mazzà, C., Donati, M., McCamley, J., Picerno, P., Cappozzo, A.: An optimized Kalman filter for the estimate of trunk orientation from inertial sensors data during treadmill walking. Gait Posture 35, 138–142 (2011)
[8] Bonnet, V., McCamley, J., Mazzà, C., Cappozzo, A.: Trunk Orientation Estimate During Walking Using Gyroscope Sensors. In: 4th IEEE RAS/EMBS Int. Conf. Biom. Rob. and Biomech., Roma, Italy, pp. 367–372 (June 2012)
[9] Riviere, C., Rader, R.S., Thakor, N.V.: Adaptive cancelling of physiological tremor for improved precision in microsurgery. IEEE Trans. Biomed. Eng. 45, 839–846 (1998)
[10] Bonnet, V., Mazzà, C., McCamley, J., Cappozzo, A.: Use of Weighted Fourier Linear Combiner filters to estimate lower trunk 3D orientation from gyroscope sensors data (submitted)