Embed Size (px)
Citation preview

Series de tiempo
Estadıstica
Miguel Angel Chong [email protected]
12 de marzo del 2013
Miguel Chong Series de tiempo

Procesos estocasticos lineales.
DefinicionUn proceso estocastico {Xt}t2T es un proceso lineal si para todo t 2 Z sepuede representar como
Xt =1X
j=�1 j✏t�j , (1)
donde {✏t}t2T es un proceso de ruido blanco y { j}1j=�1 es una sucesion
de constantes reales absolutamente sumablesP1
j=�1 | j | < 1.
Miguel Chong Series de tiempo
Vimos que un proceso estocastico {Xt}t2T con la siguiente forma
Xt =�Xt�1
+ ✏t , con |�| < 1.
Lo podemos escribir como
Xt =1X
j=0
�j✏t�j .
Entonces 0
= �0 = 1, 1
= �1, 2
= �2,... y u = 0 si el ındiceu es negativo.
Miguel Chong Series de tiempo
TeoremaSea {Yt}t2T un proceso estacionario con media cero, varianza�Y (0) = �2 y funcion de autocovarianzas �Y (h) para h � 1. Si
{ j}1j=�1 es una serie de reales tales que1X
j=�1| j | < 1 entonces
el proceso Xt =1X
j=�1 jYt�j es estacionario con media cero y fun-
cion de autocovarianzas
�X (h) =1X
j=�1
1X
k=�1 j k�Y (h � k + j), h � 0.
Miguel Chong Series de tiempo

Lo que dice el teorema anterior es que la serie que resulta deaplicarle un filtro lineal a una serie estacionaria es tambien unaserie estacionaria.
CorolarioCon las hipotesis del teorema anterior y ahora suponiendo que{Yt}t2T es ruido blanco, la funcion de autocovarianzas del procesoestocastico lineal {Xt} esta dado por
�X (h) = �21X
j=�1 j j+h, h � 0.
Miguel Chong Series de tiempo
Promedios moviles
DefinicionDiremos que {Xt}t2T es un proceso de media movil de orden q, ylo denotaremos como MA(q), si para q � 1 entero y ✓
1
, . . . , ✓q, µson constantes reales tales que para todo t 2 T tenemos
Xt =µ+ ✏t + ✓1
✏t�1
+ . . .+ ✓q✏t�q
=µ+ (1 + ✓1
B
1 + . . .+ ✓qBq)✏t
=µ+ ✓q(B)✏t
donde {✏t} es un proceso de ruido blanco. (A ✓q(B) le llamaremosel polinomio de media movil.)
Veamos si este proceso es estacionario (estacionario de segundoorden)
Miguel Chong Series de tiempo

Promedios moviles
Primero calculemos la esperanza y la varianza de un procesoMA(q)
E [Xt ] =E [µ+ ✏t + ✓1
✏t�1
+ . . .+ ✓q✏t�q]
=E [µ] + E [✏t ] + ✓1
E [✏t�1
] + ...+ ✓qE [✏t�q]
=µ.
Var [Xt ] =Var [µ+ ✏t + ✓1
✏t�1
+ . . .+ ✓q✏t�q]
=V [✏t ] + ✓21
V [✏t�1
] + ...+ ✓2qV [✏t�q]
=�2✏
qX
i=0
✓2i , donde ✓0
= 1.
Miguel Chong Series de tiempo
Promedios moviles
Ahora para calcular la funcion de autocovarianza recordemos que para unproceso estocastico lineal
Xt � µ =1X
j=�1 j✏t�j ,
sabemos que podemos encontrar la funcion de autocovarianza como
�X (h) = �2
1X
j=�1 j j+h, h � 0.
En nuestro caso tenemos que el proceso estocastico es
Xt � µ =✏t + ✓1
✏t�1
+ . . .+ ✓q✏t�q
entonces 0
= 1, 1
= ✓1
, 2
= ✓2
, . . . , q = ✓q y k = 0 para k � q+1.
Miguel Chong Series de tiempo
Promedios moviles
Entonces se puede probar que la autocorrelacion para h � 0 de unMA(q) es:
�(h) = Cov (Xt ,Xt+h) =
8>><
>>:
�2✏
q�hX
i=0
✓i✓h+i si 0 h q
0 h > q.
Notemos que esto ultimo no depende de t, el tiempo donde se estaparado, sino de cuanto estan separadas las observaciones. por lotanto es un proceso estacionario de segundo orden.
Miguel Chong Series de tiempo
Promedios moviles
La funcion de autocorrelacion para h � 0 de un MA(q) esta dadopor
⇢(h) = ⇢(Xt ,Xt+h) =�h�0
=
8>>>>>>><
>>>>>>>:
q�hX
i=0
✓i✓h+i
qX
i=0
✓2i
si 0 h q
0 h > q.
Miguel Chong Series de tiempo
Observaciones
Para una MA(q), definido por Xt = µ+ ✓q(B)✏t , si es unproceso de ruido blanco {✏t} es gaussiano (es decir tiene unadistribucion normal), entoces Xt tambien es gaussiano.
En un proceso MA(q) la funcion de autocorrelacion presentaun rasgo identificativo, puesto que es cero a partir de los lag 0smayores a el orden del proceso.
Notemos que aunque no se requieren restricciones sobre loscoeficientes, ✓
1
, . . . , ✓q para que un proceso MA (q) seaestacionario, sı hay un inconveniente que explicaremos acontinuacion.
Miguel Chong Series de tiempo

La funcion de autocorrelacion ⇢(h) es una herramienta queusaremos mas para tratar de identificar que proceso genero nuestraserie de tiempo. Por lo tanto cabe la pregunta ¿Para cada modeloMA existe una unica funcion de autocorrelacion? Por desgracia larespuesta es no.
Supongamos que tenemos los siguientes procesos MA (1)
Xt = ✏t + ✓✏t�1
y Yt = "t +1
✓"t�1
,
donde ✓ 2 R\ {0} y {✏t}t2T y {"t}t2T son dos procesos de ruidoblanco. Para estos dos procesos tenemos que la funcion deautocorrelacion es
⇢(h) =
8>><
>>:
1 si h = 0✓
1 + ✓2si h = 1
0 si h > 1.
Miguel Chong Series de tiempo
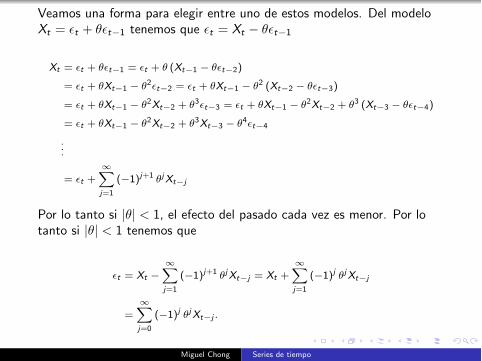
Veamos una forma para elegir entre uno de estos modelos. Del modeloXt = ✏t + ✓✏t�1
tenemos que ✏t = Xt � ✓✏t�1
Xt = ✏t + ✓✏t�1
= ✏t + ✓ (Xt�1
� ✓✏t�2
)
= ✏t + ✓Xt�1
� ✓2✏t�2
= ✏t + ✓Xt�1
� ✓2 (Xt�2
� ✓✏t�3
)
= ✏t + ✓Xt�1
� ✓2Xt�2
+ ✓3✏t�3
= ✏t + ✓Xt�1
� ✓2Xt�2
+ ✓3 (Xt�3
� ✓✏t�4
)
= ✏t + ✓Xt�1
� ✓2Xt�2
+ ✓3Xt�3
� ✓4✏t�4
.
.
.
= ✏t +1X
j=1
(�1)
j+1 ✓jXt�j
Por lo tanto si |✓| < 1, el efecto del pasado cada vez es menor. Por lotanto si |✓| < 1 tenemos que
✏t = Xt �1X
j=1
(�1)
j+1 ✓jXt�j = Xt +
1X
j=1
(�1)
j ✓jXt�j
=
1X
j=0
(�1)
j ✓jXt�j .
Miguel Chong Series de tiempo
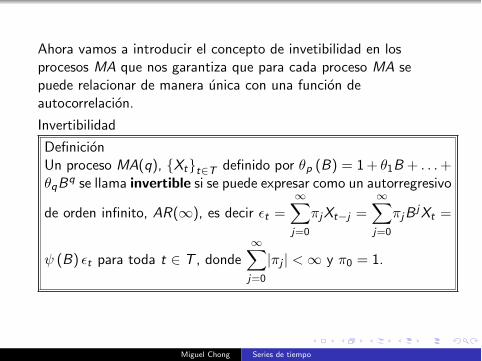
Ahora vamos a introducir el concepto de invetibilidad en losprocesos MA que nos garantiza que para cada proceso MA sepuede relacionar de manera unica con una funcion deautocorrelacion.
Invertibilidad
DefinicionUn proceso MA(q), {Xt}t2T definido por ✓p (B) = 1+ ✓
1
B + . . .+✓qBq se llama invertible si se puede expresar como un autorregresivo
de orden infinito, AR(1), es decir ✏t =1X
j=0
⇡jXt�j =1X
j=0
⇡jB jXt =
(B) ✏t para toda t 2 T , donde1X
j=0
|⇡j | < 1 y ⇡0
= 1.
Miguel Chong Series de tiempo
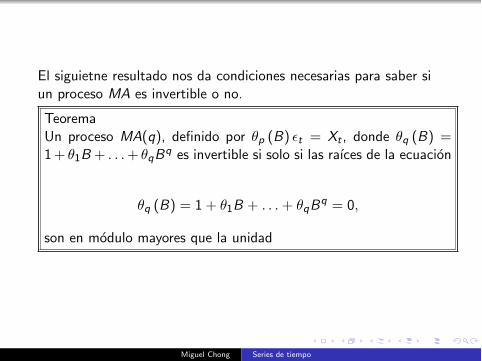
El siguietne resultado nos da condiciones necesarias para saber siun proceso MA es invertible o no.
TeoremaUn proceso MA(q), definido por ✓p (B) ✏t = Xt , donde ✓q (B) =1+ ✓
1
B + . . .+ ✓qBq es invertible si solo si las raıces de la ecuacion
✓q (B) = 1 + ✓1
B + . . .+ ✓qBq = 0,
son en modulo mayores que la unidad
Miguel Chong Series de tiempo

Ejemplo
Para un MA(2), Xt = ✏t + ✓1
✏t�1
+ ✓2
✏t�2
=�1 + ✓
1
B + ✓2
B
2
�✏t
sera invertible si las raıces del polinomio ✓2
(B)=1 + ✓1
B + ✓2
B
2
son en modulo mayores a la unidad, es decir
z1
=
�������
�✓1
+
q✓21
� 4✓2
2✓2
�������> 1 y z
2
=
�������
�✓1
�q
✓21
� 4✓2
2✓2
�������> 1.
Entonces igualando el polinomio ✓2
(B) con su factorizacion
1 + ✓1
B + ✓2
B2
= ✓2
(B)=
✓1�
B
z1
◆✓1�
B
z2
◆= 1� B
✓1
z1
+
1
z2
◆+
B2
z1
z2
Por lo tanto ✓2
= 1
z1
z2
, y ✓1
= �⇣
1
z1
+ 1
z2
⌘, con estas condiciones
tenemos que la region en R2 donde el proceso MA(2) es invertible es
�1 < ✓2
< 1,✓1
+ ✓2
< 1, ✓2
� ✓1
< 1.
Miguel Chong Series de tiempo
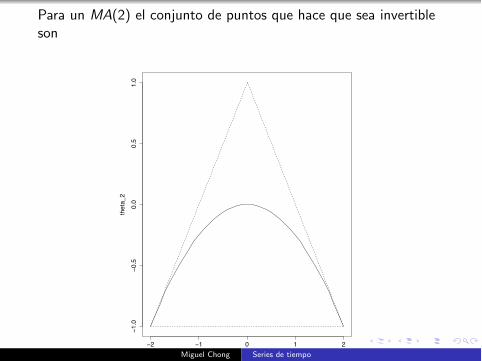
Para un MA(2) el conjunto de puntos que hace que sea invertibleson
−2 −1 0 1 2
−1.0
−0.5
0.0
0.5
1.0
theta_1
theta_2
Miguel Chong Series de tiempo
Autorregresivos
Diremos que un proceso {Xt}t2T es un autorregresivo de orden p, ylo denotaremos como AR(p), si para p � 1 un entero y �
1
, . . . ,�pconstantes reales tenemos que
Xt =�1Xt�1
+ . . .+ �pXt�p + ✏t
donde {✏t} es un proceso de ruido blanco.
En terminos de operadores de retraso tenemos
Xt � �1
Xt�1
� . . .� �pXt�p =✏t
(1� �1
B � . . .� �pBp)Xt =✏t
�p (B)Xt =✏t ,
a �p (B) se le conoce como el polinomio autorregresivo.
Miguel Chong Series de tiempo
Un proceso AR(p) puede ser estacionario o no estacionario, esodependera de los valor es de �
1
, . . . ,�p, por ejemplo
Para un AR(1) Xt = �Xt�1
+ ✏t con |�| < 1, ya habıamoscalculado que
E (Xt) = 0, �(h) =�2�h
1� �2y ⇢(h) =
�(h)
�(0)= �h.
Notemos que de lo anterior concluimos que la funcion deautocorrelacion decrece de forma exponencial y ademas queira alternado el signo si � < 0.
Miguel Chong Series de tiempo

Ahora introduciremos el concepto de causalidad para los procesoAR(p). Este concepto es casi identico a la definicion de un procesoestocastico lineal, y recordemos que para ese tipo de procesosabemos que condiciones pedir para que sean estacionarios desegundo orden. En otras palabras, si tenemos un proceso AR(p)causal entonces este sera estacionario.
DefinicionUn proceso AR(p), {Xt} definido por �p (B) = 1��
1
B�. . .��pBp
se llama causal o funcion causal de {✏t} si se puede expresar como
un MA(1), es decir Xt =1X
j=0
j✏t�j =1X
j=0
jBj✏t = (B) ✏t para
toda t 2 T , donde1X
j=0
| j | < 1 y 0
= 1.
Miguel Chong Series de tiempo
El siguiete teorema nos da condiciones necesarias para saber si unproceso AR(p) es causal o no.
TeoremaUn proceso AR(p), definido por �p (B)Xt = ✏, donde �p (B) =1��
1
B� . . .��pBp es causal si solo si las soluciones de la ecuacion
�p (B) = 1� �1
B � . . .� �pBp = 0,
son en modulo mayores que la unidad.
Miguel Chong Series de tiempo
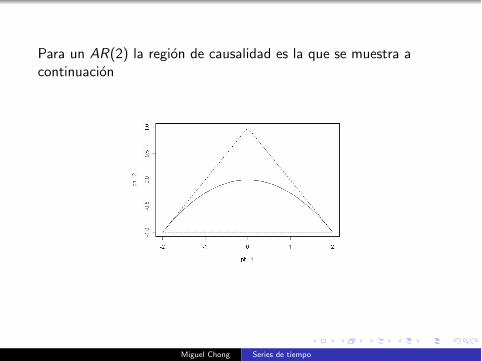
Para un AR(2) la region de causalidad es la que se muestra acontinuacion
Miguel Chong Series de tiempo

Lema
Supongamos que {Xt}t es proceso causal, Xt =P1
j=0
j✏t�j , donde{✏t}t2T es ruido blanco. Entonces
E [Xt�k✏t ] =
(�2✏ si k = 0,
0 si k > 0.
Miguel Chong Series de tiempo

Demostracion
Caso k = 0
E [Xt✏t ] = E
2
4
0
@1X
j=0
j✏t�j
1
A ✏t
3
5
=1X
j=0
jE [✏t✏t�j ]
= 0
E [✏t✏t ] = 1 · �2
✏ = �2
✏ .
Caso k > 0
E [Xt�k✏t ] = E
2
4
0
@1X
j=0
j✏t�k�j
1
A ✏t
3
5
=1X
j=0
jE [✏t✏t�k�j ] =1X
j=0
j · 0 = 0⌅
Miguel Chong Series de tiempo

Veamos una forma de calcular analıticamente las funcion deautocovarianza y autocorrelacion de un AR(2) suponiedo que escausal y ademas si perdida de generalidad E (Xt) = 0. Primerotenemos que un AR(2) se escribe como
Xt =�1Xt�1
+ �2
Xt�2
+ ✏t
donde {✏t} es ruido blando con varianza �2✏ . Si multiplicamos estaultima ecuacion por Xt�k tenemos y tomamos esperanza de amboslados tenemos que
E [XtXt�k ] =�1E [Xt�1
Xt�k ] + �2
E [Xt�2
Xt�k ] + E [✏tXt�k ] .
Que es equivalente a
�k =�1
�k�1
+ �2
�k�2
+ E [✏tXt�k ] .
Miguel Chong Series de tiempo
Usando el Lema anterior al evaluar para distintas k 0s tenemos que
�k =�1
�k�1
+ �2
�k�2
, k � 1
�0
=�1
�1
+ �2
�2
+ �2✏ .
Dividiendo estas expresiones por �0
tenemos que
⇢k =�1
⇢k�1
+ �2
⇢k�2
, k � 1 (2)
1 =�1
⇢1
+ �2
⇢2
+�2✏�0
. (3)
Evaluando (2) en k = 1 y 2 tenemos que
k = 1, ⇢1
=�1
+ �2
⇢1
,) ⇢1
=�1
1� �2
k = 2, ⇢2
=�1
⇢1
+ �2
,) ⇢2
=�21
1� �2
+ �2
.
Miguel Chong Series de tiempo

Ahora si evaluamos (2) con k = 3 y usando los resultadosanteriores obtenemos ⇢
3
, y de manera recursiva usando la ecuacion(2) podemos obtener ⇢u para u � 4.
En general para un proceso AR(p) con p � 3 decrece a cero enformas sinusoidales, pero no se anulan a partir de algun lag comosucede en los procesos MA(q).
Miguel Chong Series de tiempo







![SDCCN - Cache de Conteudo Program´ avel Definido por ...portais4.ufes.br/posgrad/teses/tese_9088_VERS%C3O%20FINAL.pdf · ternet em 2017 [Cisco 2013], ... O encaminhamento do pacote](https://img.pdfslide.us/doc/110x75/5b5bcbd97f8b9a68368b6856/sdccn-cache-de-conteudo-program-avel-denido-por-c3o20finalpdf-ternet.jpg)


![UNA 38 UNA 39 - Flowserve · UNA 38, UNA 39 ) Observe the pressure/temperature ratings! ) Inlet pressure minus outlet pressure. Orifices (O) Type ∆PMX [bar] 1)2) UNA 38 UNA 39 O](https://img.pdfslide.us/doc/110x75/5fb8abfc24a1752e642ff263/una-38-una-39-flowserve-una-38-una-39-observe-the-pressuretemperature-ratings.jpg)