-
Escape from potential wells in multi-dimensionalsystems:
experiments and partial control
Shane Ross
Engineering Mechanics Program, Virginia Tech
Dept. of Biomedical Engineering and Mechanics
shaneross.com
Amir BozorgMagham (Maryland), Lawrie Virgin (Duke), Shibabrat
Naik (Virginia Tech)
2016 Dynamics Days (Durham, January 8, 2016)
-
Intermittency and chaotic transitions
e.g., transitioning across “bottlenecks” in phase space;
‘metastability’
Marchal [1990]
ii
-
Multi-well multi-degree of freedom systems
• Examples: chemistry, vehicle dynamics, structural
mechanics
X (mode 1)
Y (mode 2)
−0.03 −0.02 −0.01 0 0.01 0.02 0.03
−0.01
0
0.01
snap-through
load
x
Y
iii
-
Transitions through bottlenecks via tubes
Topper [1997]
•Wells connected by phase space transition tubes ' S1×R for 2
DOF— Conley, McGehee, 1960s— Llibre, Mart́ınez, Simó, Pollack,
Child, 1980s— De Leon, Mehta, Topper, Jaffé, Farrelly, Uzer,
MacKay, 1990s— Gómez, Koon, Lo, Marsden, Masdemont, Ross, Yanao,
2000s
iv
-
Motion near saddles
� Near rank 1 saddles in N DOF, linearized vector
fieldeigenvalues are
±λ and ±iωj, j = 2, . . . , N
v
-
Motion near saddles
� Near rank 1 saddles in N DOF, linearized vector
fieldeigenvalues are
±λ and ±iωj, j = 2, . . . , N� Equilibrium point is of type
saddle× center× · · · × center (N − 1 centers).
2q
2p N
p
qN
x xx
1p
q1
the saddle-space projection and N − 1 center projections — the N
canonical planes
v
-
Motion near saddles
� For excess energy ∆E > 0 above the saddle, there’s
anormally hyperbolic invariant manifold (NHIM) of boundorbits
M∆E =
N∑i=2
ωi2
(p2i + q
2i
)= ∆E
vi
-
Motion near saddles
� For excess energy ∆E > 0 above the saddle, there’s
anormally hyperbolic invariant manifold (NHIM) of boundorbits
M∆E =
N∑i=2
ωi2
(p2i + q
2i
)= ∆E
� So, M∆E ' S2N−3, topologically, a (2N − 3)-sphere
vi
-
Motion near saddles
� For excess energy ∆E > 0 above the saddle, there’s
anormally hyperbolic invariant manifold (NHIM) of boundorbits
M∆E =
N∑i=2
ωi2
(p2i + q
2i
)= ∆E
� So, M∆E ' S2N−3, topologically, a (2N − 3)-sphere�N = 2, ω =
ω2,
M∆E ={ω2
(p22 + q
22
)= ∆E
}M∆E ' S1, a periodic orbit of period Tpo = 2π/ω
vi
-
Motion near saddles: 2 DOF
� Cylindrical tubes of orbits asymptotic to M∆E: stable
andunstable invariant manifolds, W s±(M∆E),W u±(M∆E),' S1×R
� Enclose transitioning trajectories
vii
-
Motion near saddles: 2 DOF
•B : bounded orbits (periodic): S1•A : asymptotic orbits to
1-sphere: S1 × R (tubes)•T : transitioning and NT :
non-transitioning orbits.
p1
q1
NTNT
T
T
A
A
A
A
B
viii
-
Tube dynamics — global picture
Poincare Section Ui
De Leon [1992]
�Tube dynamics: All transitioning motion between wellsconnected
by bottlenecks must occur through tube• Imminent transition
regions, transitioning fractions• Consider k Poincaré sections Ui,
various excess energies ∆E
ix
-
Is this geometric theory correct?
x
-
Is this geometric theory correct?• Good agreement with direct
numerical simulation
x
-
Is this geometric theory correct?• Good agreement with direct
numerical simulation
— molecular reactions, ‘reaction island theory’ e.g., De Leon
[1992]
Dow
nloaded 16 Sep 2003 to 131.215.42.220. Redistribution subject to
A
IP license or copyright, see
http://ojps.aip.org/jcpo/jcpcr.jsp
x
-
Is this geometric theory correct?• Good agreement with direct
numerical simulation
— molecular reactions, ‘reaction island theory’ e.g., De Leon
[1992]
Dow
nloaded 16 Sep 2003 to 131.215.42.220. Redistribution subject to
A
IP license or copyright, see
http://ojps.aip.org/jcpo/jcpcr.jsp
— celestial mechanics, asteroid escape rates e.g., Jaffé, Ross,
Lo, Marsden, Farrelly, Uzer [2002]
0 10 20 30 40
Number of Periods
1
0.9
0.8
0.6
Su
rvival
Pro
ba
bility
0.7
0.5
x
-
Is this geometric theory correct?
Spacecraft trajectories have been designed and flown
xi
-
Is this geometric theory correct?
Spacecraft trajectories have been designed and flown
xi
-
Is this geometric theory correct?
xii
-
Is this geometric theory correct?
• Experimental verification is needed, to enable
applications
xii
-
Is this geometric theory correct?
• Experimental verification is needed, to enable
applications
•Our goal: We seek to perform experimental verification using a
tabletop experiment with 2 degrees of freedom (DOF)
xii
-
Is this geometric theory correct?
• Experimental verification is needed, to enable
applications
•Our goal: We seek to perform experimental verification using a
tabletop experiment with 2 degrees of freedom (DOF)
• If successful, apply theory to ≥2 DOF systems, combine with
control:
xii
-
Is this geometric theory correct?
• Experimental verification is needed, to enable
applications
•Our goal: We seek to perform experimental verification using a
tabletop experiment with 2 degrees of freedom (DOF)
• If successful, apply theory to ≥2 DOF systems, combine with
control:• Preferentially triggering or avoiding transitions
— ship stability / capsize, etc.
xii
-
Is this geometric theory correct?
• Experimental verification is needed, to enable
applications
•Our goal: We seek to perform experimental verification using a
tabletop experiment with 2 degrees of freedom (DOF)
• If successful, apply theory to ≥2 DOF systems, combine with
control:• Preferentially triggering or avoiding transitions
— ship stability / capsize, etc.
• Structural mechanics— re-configurable deformation of flexible
objects
xii
-
Verification by experiment
xiii
-
Verification by experiment• Simple table top experiments; e.g.,
ball rolling on a 3D-printed surface• motion of ball recorded with
digital camera
xiii
-
Verification by experiment• Simple table top experiments; e.g.,
ball rolling on a 3D-printed surface• motion of ball recorded with
digital camera
Virgin, Lyman, Davis [2010] Am. J. Phys.xiii
-
Ball rolling on a surface — 2 DOF
• The potential energy is V (x, y) = gH(x, y),where the surface
is arbitrary, e.g., we chose
H(x, y) = α(x2 + y2)− β(√x2 + γ +
√y2 + γ)− ξxy + H0.
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15
3 4 5 6 7 8 9 10 11 12
xiv
-
Ball rolling on a surface — 2 DOF
• The potential energy is V (x, y) = gH(x, y),where the surface
is arbitrary, e.g., we chose
H(x, y) = α(x2 + y2)− β(√x2 + γ +
√y2 + γ)− ξxy + H0.
typical experimental trialxv
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
xvi
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
12
34
xvii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
12
34
xviii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
12
34
xix
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
xx
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
transion tube from quadrant 1 to 2
xxi
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
transion tube from quadrant 1 to 2
xxii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxiii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxiv
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxv
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxvi
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxvii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxviii
-
Transition tubes in the rolling ball system
−10 −5 0 5 10
−10
−5
0
5
10
5 10−50
−40
−30
−20
−10
0
10
20
30
40
50
(cm)
(cm
/s)
transion tube from quadrant 1 to 2
xxix
-
Analysis of experimental data
12-600
-400
-200
0
200
400
600
800
1000
1200
1400
108640 2
time
• 120 experimental trials of about 10 seconds each, recorded at
50 Hz
xxx
-
Analysis of experimental data
12-600
-400
-200
0
200
400
600
800
1000
1200
1400
108640 2
time
• 120 experimental trials of about 10 seconds each, recorded at
50 Hz• 3500 intersections of Poincaré sections, sorted by
energy
xxxi
-
Analysis of experimental data
12-600
-400
-200
0
200
400
600
800
1000
1200
1400
108640 2
time
• 120 experimental trials of about 10 seconds each, recorded at
50 Hz• 3500 intersections of Poincaré sections, sorted by energy•
400 transitions detected
xxxii
-
Analysis of experimental data
12-600
-400
-200
0
200
400
600
800
1000
1200
1400
108640 2
time
• 120 experimental trials of about 10 seconds each, recorded at
50 Hz• 3500 intersections of Poincaré sections, sorted by energy•
400 transitions detected
xxxiii
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[-500,-400]
xxxiv
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[-400,-300]
xxxv
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[-300,-200]
xxxvi
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[-200,-100]
xxxvii
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[-100,0]
xxxviii
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[0,100]
xxxix
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[100,200]
xl
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[200,300]
xli
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[300,400]
xlii
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[400,500]
xliii
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[500,600]
xliv
-
Poincaré sections at various energy ranges
r (cm)0 5 10 15
pr(cm/s)
-80
-60
-40
-20
0
20
40
60
80
∆E=[600,700]
xlv
-
Experimental confirmation of transition tubes
• Theory predicts all transitions (p value of correlation <
0.0001)
xlvi
-
Experimental confirmation of transition tubes
• Theory predicts all transitions (p value of correlation <
0.0001)• Consider overall trend in transition fraction as excess
energy grows
xlvi
-
Experimental confirmation of transition tubes
• Theory predicts all transitions (p value of correlation <
0.0001)• Consider overall trend in transition fraction as excess
energy grows
-300 -200 -100 0 100 200 300 400 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Experiment
Tra
ns
itio
n f
rac
tio
n
xlvi
-
Theory for small excess energy, ∆E
• Area of the transitioning region, the tube cross-section
(MacKay [1990])Atrans = Tpo∆E
where Tpo = 2π/ω period of unstable periodic orbit in
bottleneck
xlvii
-
Theory for small excess energy, ∆E
• Area of the transitioning region, the tube cross-section
(MacKay [1990])Atrans = Tpo∆E
where Tpo = 2π/ω period of unstable periodic orbit in
bottleneck
• Area of energy surfaceA∆E = A0 + τ∆E
xlvii
-
Theory for small excess energy, ∆E
• Area of the transitioning region, the tube cross-section
(MacKay [1990])Atrans = Tpo∆E
where Tpo = 2π/ω period of unstable periodic orbit in
bottleneck
• Area of energy surfaceA∆E = A0 + τ∆E
where
A0 = 2
∫ rmaxrmin
√−145 gH(r)(1 + ∂H∂r
2(r))dr
xlvii
-
Theory for small excess energy, ∆E
• Area of the transitioning region, the tube cross-section
(MacKay [1990])Atrans = Tpo∆E
where Tpo = 2π/ω period of unstable periodic orbit in
bottleneck
• Area of energy surfaceA∆E = A0 + τ∆E
where
A0 = 2
∫ rmaxrmin
√−145 gH(r)(1 + ∂H∂r
2(r))dr
and
τ =
∫ rmaxrmin
√√√√145 (1 + ∂H∂r 2(r))−gH(r) dr
xlvii
-
Theory for small excess energy, ∆E
• The transitioning fraction, under well-mixed assumption,
ptrans =AtransA∆E
=TpoA0
∆E(
1− τA0∆E +O(∆E2))
xlviii
-
Theory for small excess energy, ∆E
• The transitioning fraction, under well-mixed assumption,
ptrans =AtransA∆E
=TpoA0
∆E(
1− τA0∆E +O(∆E2))
• For small ∆E, growth in ptrans with ∆E is linear, with
slope∂ptrans∂∆E
=TpoA0
xlviii
-
Theory for small excess energy, ∆E
• The transitioning fraction, under well-mixed assumption,
ptrans =AtransA∆E
=TpoA0
∆E(
1− τA0∆E +O(∆E2))
• For small ∆E, growth in ptrans with ∆E is linear, with
slope∂ptrans∂∆E
=TpoA0
• For slightly larger values of ∆E, there will be a correction
term leadingto a decreasing slope,
∂ptrans∂∆E
=TpoA0
(1− 2 τA0∆E
)
xlviii
-
Theory for small excess energy, ∆E
-300 -200 -100 0 100 200 300 400 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Experiment
Tra
ns
itio
n f
rac
tio
n
xlix
-
Theory for small excess energy, ∆E
-300 -200 -100 0 100 200 300 400 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Experiment
Tra
ns
itio
n f
rac
tio
n
Theoretical
slope
l
-
Theory for small excess energy, ∆E
-300 -200 -100 0 100 200 300 400 500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Experiment
Tra
ns
itio
n f
rac
tio
n
Theoretical
slope
Slopes agree
within 5%
li
-
Combine with control
• Since geometric theory provides the routes of transition /
escape, cancombine with control to trigger or avoid transitions
lii
-
Combine with control
• Since geometric theory provides the routes of transition /
escape, cancombine with control to trigger or avoid transitions
•We’ll consider partial controlSabuco, Sanjuán, Yorke [2012];
Coccolo, Seoane, Zambrano, Sanjuán [2013]
lii
-
Combine with control
• Since geometric theory provides the routes of transition /
escape, cancombine with control to trigger or avoid transitions
•We’ll consider partial controlSabuco, Sanjuán, Yorke [2012];
Coccolo, Seoane, Zambrano, Sanjuán [2013]
— avoid a transition in the presence of a disturbance which is
largerthan the control
lii
-
Partial control - safe set S
liii
-
Partial control - safe set S
Region to be avoided in white
liv
-
Partial control - safe set S
Region to be avoided in white - could include holes
lv
-
Partial control - safe set S
lvi
-
Partial control - safe set S
lvii
-
Partial control - safe set S
lviii
-
Partial control - safe set S
lix
-
Partial control - safe set S
lx
-
Partial control - safe set S
lxi
-
Partial control - safe set S
lxii
-
Partial control - safe set S
Control smaller than disturbance
lxiii
-
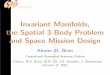
Ship motion and capsize
lxiv
-
Ship motion and capsize
lxv
-
Ship motion and capsize
•Model built around Hamiltonian,H = p2x/2 + R
2p2y/4 + V (x, y),
where x = roll and y = pitch arecoupled
V (x, y)
lxvi
-
Ship motion and capsize
•Model built around Hamiltonian,H = p2x/2 + R
2p2y/4 + V (x, y),
where x = roll and y = pitch arecoupled
V (x, y)
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
-1.5 -1 -0.5 0 0.5 1 1.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
E < Ec E > Eclxvi
-
Tubes leading to capsize(a) (b) (c)
Poincare S-O-S, U1transition tube
periodic orbit
(d)
Figure 10: E↵ective potential energy V (x, y) in configuration
space and the tubes leading to es-cape.Fig. 10(b) and Fig. 10(c)
show the Hill’s region and energetically forbidden realm (EFR) fore
> ecritical and e < ecritical where ecritical denotes the
critical energy. The white regions are ener-getically accessible
and bounded by the zero velocity curve (the boundary of M(e)).
Beyond thezero velocity curve, the shaded region, lies the
energetically forbidden region where kinetic energyis negative and
motion is impossible.
(Eqn. (11)) and apply tube dynamics (for application in
celestial mechanics see Ross [2004], Koonet al. [2000]) to organize
trajectories exhibiting bounded and unbounded motion. A related
tech-
10
lxvii
-
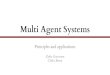
Partial control to avoid capsize
(a) (b)
Figure 16: Initial set and its image that defines the set on the
Poincaré Surface-Of-Section we wantthe dynamics to stay.
(a) Iteration # 1 (b) Iteration # 2 (c) Iteration # 3
(d) Iteration # 4 (e) Iteration # 5 (f) Iteration # 6
Figure 17: Safe set computed for a significant wave height, Hs =
0.1 m and return time to thePoincaré Surface-Of-Section as the
feedback partial control time which gives a discrete disturbance,⇠0
= 0.277915. This system is seemingly hard to partially control as
even for a small wave height,there are no safe sets below a safe
ratio ⇢0 = 0.825.
20
y-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
v y
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
initial set Q safe set S
• Safe set shown when disturbance (red) is random ocean waves
andsmaller control (green) is via steering or control moment
gyroscope
• Could inform control schemes to avoid capsize in rough
seas
lxviii
-
Partial control to avoid capsize
(a) (b)
Figure 16: Initial set and its image that defines the set on the
Poincaré Surface-Of-Section we wantthe dynamics to stay.
(a) Iteration # 1 (b) Iteration # 2 (c) Iteration # 3
(d) Iteration # 4 (e) Iteration # 5 (f) Iteration # 6
Figure 17: Safe set computed for a significant wave height, Hs =
0.1 m and return time to thePoincaré Surface-Of-Section as the
feedback partial control time which gives a discrete disturbance,⇠0
= 0.277915. This system is seemingly hard to partially control as
even for a small wave height,there are no safe sets below a safe
ratio ⇢0 = 0.825.
20
(a) (b)
Figure 16: Initial set and its image that defines the set on the
Poincaré Surface-Of-Section we wantthe dynamics to stay.
(a) Iteration # 1 (b) Iteration # 2 (c) Iteration # 3
(d) Iteration # 4 (e) Iteration # 5 (f) Iteration # 6
Figure 17: Safe set computed for a significant wave height, Hs =
0.1 m and return time to thePoincaré Surface-Of-Section as the
feedback partial control time which gives a discrete disturbance,⇠0
= 0.277915. This system is seemingly hard to partially control as
even for a small wave height,there are no safe sets below a safe
ratio ⇢0 = 0.825.
20
initial set Q safe set S
• Safe set shown when disturbance (red) is random ocean waves
andsmaller control (green) is via steering or control moment
gyroscope
• Could inform control schemes to avoid capsize in rough
seas
lxix
-
Next steps — structural mechanics
Buckling, bending, twisting, and crumpling of flexible
bodies
• adaptive structures that can bend, fold, and twist to provide
advancedengineering opportunities for deployable structures,
mechanical sensors
lxx
-
Next steps — structural mechanics
X (mode 1)
Y (mode 2)
−0.03 −0.02 −0.01 0 0.01 0.02 0.03
−0.01
0
0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
X
X
Y
Y.
snap-through
load
x
Y
lxxi
-
Next steps — structural mechanics
X (mode 1)
Y (mode 2)
−0.03 −0.02 −0.01 0 0.01 0.02 0.03
−0.01
0
0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
X
X
Y
Y.
snap-through
load
x
Ynon-snap-through
lxxii
-
Next steps — structural mechanics
X (mode 1)
Y (mode 2)
−0.03 −0.02 −0.01 0 0.01 0.02 0.03
−0.01
0
0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
X
snap-through
X
Y
Y.
snap-through
load
x
Ynon-snap-through
lxxiii
-
Next steps — structural mechanics
X (mode 1)
Y (mode 2)
−0.03 −0.02 −0.01 0 0.01 0.02 0.03
−0.01
0
0.01
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
X
snap-through
X
Y
Y.
snap-through
load
x
Y
lxxiv
-
Final words
• 2 DOF experiment for understanding geometry of transitions
lxxv
-
Final words
• 2 DOF experiment for understanding geometry of transitions—
verified geometric theory of tube dynamics
lxxv
-
Final words
• 2 DOF experiment for understanding geometry of transitions—
verified geometric theory of tube dynamics
• Unobserved unstable periodic orbits have observable
consequences
lxxv
-
Final words
• 2 DOF experiment for understanding geometry of transitions—
verified geometric theory of tube dynamics
• Unobserved unstable periodic orbits have observable
consequences• Future work:
– analysis and control of transitions in other multi-DOF
systemse.g., triggering and avoidance of buckling in flexible
structures, capsizeavoidance for ships in rough seas and floating
structures
lxxv
-
Final words
• 2 DOF experiment for understanding geometry of transitions—
verified geometric theory of tube dynamics
• Unobserved unstable periodic orbits have observable
consequences• Future work:
– analysis and control of transitions in other multi-DOF
systemse.g., triggering and avoidance of buckling in flexible
structures, capsizeavoidance for ships in rough seas and floating
structures
Thanks to: Lawrie Virgin, Amir BozorgMagham, Shibabrat Naik
lxxv
-
Final words
• 2 DOF experiment for understanding geometry of transitions—
verified geometric theory of tube dynamics
• Unobserved unstable periodic orbits have observable
consequences• Future work:
– analysis and control of transitions in other multi-DOF
systemse.g., triggering and avoidance of buckling in flexible
structures, capsizeavoidance for ships in rough seas and floating
structures
Thanks to: Lawrie Virgin, Amir BozorgMagham, Shibabrat Naik
Papers in preparation; check status at:shaneross.com
lxxv
Intermittency and chaotic transitionsMulti-well multi-degree of
freedom systemsTransitions through bottlenecks via tubesMotion near
saddlesMotion near saddlesMotion near saddles: 2 DOFMotion near
saddles: 2 DOFTube dynamics — global pictureIs this geometric
theory correct?Is this geometric theory correct?Is this geometric
theory correct?Verification by experimentBall rolling on a surface
— 2 DOFBall rolling on a surface — 2 DOFTransition tubes in the
rolling ball systemTransition tubes in the rolling ball
systemTransition tubes in the rolling ball systemTransition tubes
in the rolling ball systemTransition tubes in the rolling ball
systemTransition tubes in the rolling ball systemTransition tubes
in the rolling ball systemTransition tubes in the rolling ball
systemTransition tubes in the rolling ball systemTransition tubes
in the rolling ball systemTransition tubes in the rolling ball
systemTransition tubes in the rolling ball systemTransition tubes
in the rolling ball systemTransition tubes in the rolling ball
systemAnalysis of experimental dataAnalysis of experimental
dataAnalysis of experimental dataAnalysis of experimental
dataPoincaré sections at various energy rangesPoincaré sections at
various energy rangesPoincaré sections at various energy
rangesPoincaré sections at various energy rangesPoincaré sections
at various energy rangesPoincaré sections at various energy
rangesPoincaré sections at various energy rangesPoincaré sections
at various energy rangesPoincaré sections at various energy
rangesPoincaré sections at various energy rangesPoincaré sections
at various energy rangesPoincaré sections at various energy
rangesExperimental confirmation of transition tubesTheory for small
excess energy, ETheory for small excess energy, ETheory for small
excess energy, ETheory for small excess energy, ETheory for small
excess energy, ECombine with controlPartial control - safe set
SPartial control - safe set SPartial control - safe set SPartial
control - safe set SPartial control - safe set SPartial control -
safe set SPartial control - safe set SPartial control - safe set
SPartial control - safe set SPartial control - safe set SPartial
control - safe set SShip motion and capsizeShip motion and
capsizeShip motion and capsizeTubes leading to capsizePartial
control to avoid capsizePartial control to avoid capsizeNext steps
— structural mechanicsNext steps — structural mechanicsNext steps —
structural mechanicsNext steps — structural mechanicsNext steps —
structural mechanicsFinal words