Embed Size (px)
Citation preview

6.09Erosion/Corrosion
R. J. K. WOOD
University of Southampton, Southampton, UK
6.09.1 INTRODUCTION AND DEFINITIONS 397
6.09.1.1 High-Temperature Erosion–Corrosion 3986.09.1.2 General Models 399
6.09.2 EROSION–CORROSION FUNDAMENTALS 399
6.09.2.1 Factors Affecting Erosion–Corrosion 3996.09.2.1.1 Material parameters 3996.09.2.1.2 Coatings 4016.09.2.1.3 Environment factors 4016.09.2.1.4 Geometry factors 4036.09.2.1.5 Galvanic interactions 405
6.09.2.2 Electrochemical Reaction Kinetics 4066.09.2.2.1 Kinetics under polarization 4066.09.2.2.2 Mass-transfer coefficient 408
6.09.2.3 Fluid Flow Fields 4086.09.2.3.1 Turbulence 4086.09.2.3.2 Wall shear stresses 410
6.09.2.4 Erosion Fundamentals 4106.09.2.4.1 Solid-particle erosion 410
6.09.3 EROSION–CORROSION MECHANISMS 412
6.09.3.1 Flow-Accelerated Corrosion 4126.09.3.1.1 Koutecky–Levich equation 412
6.09.3.2 Particle–Surface Interactions 4136.09.3.2.1 Depassivation and repassivation kinetics 413
6.09.3.3 Synergy 4156.09.3.3.1 Models and mapping 415
6.09.4 EROSION–CORROSION TESTING 419
6.09.4.1 Gravimetric and Coupon Techniques 4196.09.4.2 Rotating Systems 4206.09.4.3 Flow Systems 421
6.09.5 EROSION–CORROSION DETECTION 421
6.09.5.1 Advanced Electrochemical Monitoring 4216.09.5.1.1 Electrochemical noise 421
6.09.6 EROSION–CORROSION-RESISTANT MATERIAL AND SURFACE SELECTION 422
6.09.7 CONCLUSIONS 423
6.09.8 REFERENCES 425
NOMENCLATURE
a scaling constantA real contact area (m2)
3
Aa affected area (m2)aj jump distance (m)Anom nominal contact area (m2)
95

396 Erosion/Corrosion
B migration kinetic constant (�zFaj/RT)
ba anodic Tafel slope (mV decade�1)bc cathodic Tafel slope (mV decade�1)C pure corrosion (mg or mg s�1)C9 static corrosion rate (mg or mg s�1)C0 corrosion rate under erosion–corro-
sion (mg or mg s�1)C0 concentration of species at electrode
surface (M, mM, mol cm�3)C1 constantC1 concentration of soluble ferrous
ions in the bulk solution (M, mM,mol cm�3)
Cb bulk concentration of species (M,mM, mol cm�3)
Ceq concentration of soluble ferrousions at equilibrium (M, mM,mol cm�3)
Ci concentration of species i (M, mM,mol cm�3)
Cibulk bulk concentration of species i (M,
mM, mol cm�3)Ck cutting characteristic velocity
(m s�1)Cs system constantCv solids volume fractionD diffusion coefficient (cm2 s�1)Db bend bore diameter (m)Di diffusion coefficient of species i
(cm2 s�1)Eapplied applied potential (V)E pure erosion (mg or mg s�1)Ecorr freely corroding potential (open cir-
cuit potential) (V)Eeq equilibrium potential (V)Ek kinetic energy of impacting particle
(J)Em Young’s modulus (Pa)Er Erosion rate (mg kg�1)F Faraday constant (C mol�1)fa stripping coefficientFy characteristic functionH hardness (Vickers number)Hp particle hardness (Pa)Ht target hardness (Pa)I anodic or cathodic current (A)I0 exchange current (A)ia activation-controlled current den-
sity (A m�2)Ia anodic current (A)iaff affected current density (A m�2)ic cathodic current density (A m�2)Ic cathodic current (A)icorr corrosion current density (A m�2)id diffusion-controlled current density
(A m�2)iL limiting corrosion current density
(A m�2)Ilim limiting current (A)
Ireaction reaction current (A)iu unaffected current density (A m�2)Ji flux of species i (mol s�1 cm�2)K constantk1 forward reaction rateK1 constantk�1 backward reaction ratekm mass-transport coefficient (cm s�1)ka anodic rate constantkB rate constantL characteristic length (m)Lox oxide layer thickness (m)m mass of oxide removal (kg)Mm equivalent molar massMox mass of oxide (kg)_Mp mass of sand impacting the surface
per unit time (kg s�1)n velocity ratio exponent or bulk con-
centration exponentN number of erodent impactsNo,u total number of surface sites
availableNu number of moles of oxide formedq charge passed ¼
RI dt
R universal molar gas con-stant ¼ 8.31451 (J K�1 mol�1)
Ra surface roughness (mm)Rc bend radius (m)Rf roundness factor for particle (value
0–1)rp particle radius (m)Re Reynolds numberS synergy (mg or mg s�1)Sc Schmidt numberSh Sherwood numberT total wear or erosion loss (mg or
mg s�1)Ty temperature (�C)U free stream velocity (m s�1)Ucr critical velocity for plastic deforma-
tion (m s�1)Uf velocity component normal to sur-
face (m s�1)Up particle velocity (m s�1)v* friction velocity (¼p(�w/r))
(m s�1)Vcr critical particle impact velocity for
plastic flow (m s�1)vs volume fraction of abrasivesVu erosion rate (mm3 impact�1)W erosion mass loss per unit time
(mg s�1)y vertical height (m)yþ dimensionless scalez number of electronszi valencea angle of impact (�)a1 symmetry constantb charge-transfer barrier coefficientd boundary layer thickness (m)

Introduction and Definitions 397
DC change in concentration of species(¼(Cb� C0)) (M, mM, mol cm�3)
DCi change in concentration of species i(M, mM, mol cm�3)
DCe enhancement of C due to the pre-sence of erosion (mg or mg s�1)
DC9e enhancement of C9 due to flow anderosion (mg or mg s�1)
DEc synergistic effect or enhanced ero-sion rate due to corrosion (mg ormg s�1)
DH change in hardness (Hv or Pa)Dw mass loss (mg)Dx change in distance in x direction (m)Df potential difference across oxide (V)ec critical plastic strain (mm m�1)Z turbulent eddy viscosity (Pa s)Zc cathodic overpotential (mV)Za anodic overpotential (mV)Zact activation overpotential
(mV) ¼ Eapplied � Eeq
y surface coverage fractionl particle flux (impact m�2 s�1)li molar conductivity (S m2 mol�1)rf density of fluid (kg m�3)rox density of oxide (kg m�3)rp density of particle (kg m�3)rt density of target material (kg m�3)� dynamic plastic flow stress for target
(N m�2)�C standard deviation of flow corrosion
current (A)�T standard deviation of erosion–cor-
rosion current (A)
6.09.1 INTRODUCTION ANDDEFINITIONS
The derivations of both ‘erosion’ and ‘corro-sion’ have similar origins in the Latin verb rodereand corrodere which mean ‘to gnaw away’ and‘intensely gnaw away’, respectively (OxfordEnglish Dictionary Online, 2006). The term ero-sion is used in a diverse number of technologiesranging from geological loss of rock, soil, andbeach to loss of wall thickness in engineeringsystems. Corrosion can be defined as the chemi-cal or electrochemical reaction between amaterial, typically electrically conducting (i.e.,metallic), and its environment which producesmaterial deterioration and degradation of mate-rial properties. Corrosion has an equally wideuse, covering electrochemical dissolution ofmetal surfaces to staining of metallic architec-tural fittings on buildings to the degradation ofplastics. In the context of this chapter, the termrelates to surface degradation involving electro-chemical processes only.
t passive film recovery time (s)tw wall shear stress (N m�2)� kinematic viscosity (m2 s�1)m dynamic viscosity (Pa s)
ABBREVIATIONS
AISI American Iron and Steel InstituteASTM American Society for Testing and
MaterialsCE counter electrodeCFD computation fluid dynamicsCRA corrosion-resistant alloyCVD chemical vapor depositionECN electrochemical current noiseENA electrochemical noise analysisEPN electrochemical potential noiseEPS extracellular polymeric substancesFBC fluidized bed combustorsHVOF high-velocity oxy-fuelKE kinetic energyMDPE medium-density polyethyleneNAB nickel aluminum bronzeNACE National Association of Corrosion
EngineersOCP open circuit potentialPEO plasma electrolytic oxidationRCE rotating cylinder electrodesRDE rotating disc electrodesRE reference electrodeSCE saturated calomel electrodeUNS Unified National SystemWC tungsten carbide
Erosion is a process by which discrete smallsolid particles, with inertia, strike the surface ofa material causing damage or material loss to itssurface. Erosion can be a problem for compo-nents such as turbine blades, propulsors,pipelines, and fluidized bed combustion sys-tems. Erosion does have its beneficialapplications, notably for cleaning and prepara-tion of surfaces for subsequent coating/paintingby grit-blasting, descaling/dewaxing produc-tion risers in the oil and gas industries, andcutting through rocks or subsea steel oil struc-tures using abrasive water jets.
Erosion–corrosion is a combination of erosionand corrosion processes and has been used todescribe component wall dissolution rates underflow-assisted corrosion as well as wall loss ratesunder solid-particle erosion and corrosion orcavitation erosion and corrosion conditions.Within this chapter, the term erosion–corrosionis restricted to describe conditions where bothmechanical erosion and electrochemical corro-sion processes are acting together and where

398 Erosion/Corrosion
mechanically induced material loss is equal to orabout 10 times greater than the corrosion-induced material loss. The term corrosion–erosion relates to the opposite condition, wherecorrosion-induced material loss is equal to orabout 10 times greater than the erosion-inducedmaterial loss. The chapter uses ‘flow-assisted cor-rosion’ to describe enhanced corrosion wheremechanical processes are not involved such assingle-phase flows relative to component wallsurfaces. However, to fully discuss erosion–corro-sion, the chapter initially sets out to detail some ofthe current understanding of flow-assisted orenhanced corrosion prior to introducing the con-sequence of adding mechanical erosive processesonmaterial removal rates. It should be noted thatprevious literature has sometimes used a muchmore liberal definition of erosion–corrosion.
The need to minimize costs associated withmodern fluid handling and propulsion equip-ment demands increasing flow rates with theinherent risk of flow-dependent corrosion and,if solids are entrained or cavitation occurs, ero-sion–corrosion. This is especially true forindustries that transport slurries and other par-ticle-laden fluids in pipes or seawaterpropulsion systems such as offshore and marinetechnologies. These industries expend theequivalent of millions of pounds every year onmaintenance costs and on costs associated withloss of productivity caused by solid-particleimpingement and cavitation erosion–corrosiondamage. Typical examples of this kind of mate-rial destruction are erosion–corrosion damageto pump impellers (see Figure 1), propellers,valves, heat exchanger tubes, pneumatic andhydrotransport systems, fluidized bed combus-tors (FBCs), and many other types of fluid-handling equipment. In a recent survey,erosion–corrosion was rated in the top fivemost prevalent forms of corrosion damage inthe oil and gas industry (McIntyre, 1999). Theerosion–corrosion data and models publishedin the open literature aspire to allow informedsurface selection for combined erosion and cor-rosion resistance. However, this information is
Figure 1 Erosion–corrosion of a 150 mm diameteroffshore downhole centrifugal pump impeller.
very patchy and incomplete, therefore badlyhampering any improvement in the perfor-mance of machines in aggressive environments.
This chaptermainly focuses on aqueous-basedexamples of erosion–corrosion. An excellentreview of solid-particle erosion–corrosion causedby gas streams at room temperature and elevatedtemperatures can be found in Levy (1995). Abrief overview of high-gas-temperature solid-particle erosion–corrosion is given below tointroduce some of the complexities of erosion–corrosion and to highlight some importantmate-rial properties required for resisting erosion–corrosion. The main surface characteristic toresist erosion–corrosion conditions, not forhigh-temperature gas–solid flow systems only,is the ability to form a protection surface layeror passive film. These surface films can restrictcharge transfer across liquid/solid interfaces,reduce the contact stresses induced by low-energy mechanical impacts by erosive processes,and reform (repassivate or oxidize) after beingdamaged to reduce corrosion loss rates.
6.09.1.1 High-TemperatureErosion–Corrosion
High-temperature erosion–corrosion can beinduced in such cases as heat exchanger tubingin both FBCs and pulverized coal-fired burners,where surfaces are exposed to impingements byhot oxidizing gas-particle mixtures. The perfor-mances of chromium steels under suchenvironments rely on the formation of a surfaceoxide layer. Such oxides are sensitive to thesilicon content of the parent steel, with increas-ing levels of Si resulting in retardation of oxideformation under the transition temperature(,450 �C). For temperatures above transition,a tenacious and ductile oxide scale is formed,which protects the parent material from ero-sion–corrosion under low solid-particleimpingement angles (30�) and impact energies(particle kinetic energy ,34 nJ).
Generally for steels, various material proper-ties are important in controlling erosion–corrosion induced by gas–solid and liquid–solidflows. Ductility is thought to be a controllingparameter as it determines the contact stressesinduced by solid-particle impingements andthus reduces the erosivity. Thermal conductivityis also thought to influence contact heating whensolid particles impact steel surfaces. Calculationsshow that temperatures close to annealing valuescan be generated with significant consequencesfor the near-surface oxide formation, microstruc-ture, and mechanical properties of eroded steels.The strain rate on impact is thought to affect theability of cracks to heal within oxide scales. The

y = 5E + 08x –3.2201
y = 3040.9x –1.597
R
2 = 0.6767
R
2 = 0.9084
0.000 01
0.000 1
0.001
0.01
0.1
1
100 1000 10 000
Surface Vickers hardness (Hv)
Ductile surfaces
Brittle surfaces
Ero
sion
rat
e(μ
m3 /
impa
ct)
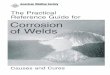
Figure 2 Erosion rates for a wide range ofengineering materials and coatings under water–sand slurry erosion conditions of 16.5 m s�1 free jetimpingement at 90� jet impingement angle with135 mm sand at 2.1% w/w concentration over 5 htest duration. From Wood, R. J. K. 2004a.Erosion–corrosion interactions and their effects onmarine and offshore components. Keynote atEuroCorr Conference, Nice, France and acceptedfor publication in the Special Issue onTribocorrosion, Wear 2006.
Erosion–Corrosion Fundamentals 399
presence of cracks is important for the integrityof the scale and its ability to protect the parentsteel from erosion and further oxidation.
6.09.1.2 General Models
Erosion and erosion–corrosion models arevery system specific, typically being related toa unique combination of flow field and mate-rial, and therefore no real generic models areavailable. The published erosion–corrosiondata are sporadic in diverse applications/areasand hamper robust guidance for surface selec-tion. Therefore, this chapter points to what iscurrently understood and aims to discuss issuesrelated to structural integrity.
6.09.2 EROSION–CORROSIONFUNDAMENTALS
6.09.2.1 Factors Affecting Erosion–Corrosion
6.09.2.1.1 Material parameters
A review of available solid-particle erosionmodels shows the diversity of material proper-ties that have been included in publishedpredictive erosion equations. Meng andLudema (1995) have reviewed 28 erosion mod-els and found that, on average, only fiveparameters are used per equation, but in total33 different parameters, not all material proper-ties, are quoted. These are tabulated in Table 1.
It is tempting to assume that sand-erosion ratewould be inversely dependent on the surfacehardness,H, as predicted by simple plastic defor-mation erosion models, eqn [1] (Hutchings,
Table 1 Parameters selected in erosion
Erodent Target
Density DensityHardness HardnessMoment of inertia Flow stressRoundness Young’s moduluSingle mass Fracture toughnSize Critical plastic stVelocity Depth of deformRebound velocity Incremental straKinetic energy (KE) of particle Thermal conduc
Melting temperaEnthalpy of meltCutting energyDeformation eneErosion resistancHeat capacityGrain molecularWeibull flaw parLame constantGrain diameter
1992). However, this relationship rarely holds inpractice for engineering materials:
Er ¼KrTUp
n
Hf ðyÞ ½1�
The erosion rates, expressed as volume lossper impact (assuming all erodent particlesimpinge and damage the target surface), Vu,obtained by testing at the University ofSouthampton are plotted against Vickers hard-ness values in Figure 2. Numerous materialsurfaces were tested under water–sand slurryerosion conditions of 16.5 m s�1 free jet impin-gement at 90� jet impingement angle with
wear models (Meng and Ludema, 1995)
Fluid flow
Impact angleImpact angle max. wearKE transfer from particle to target
s Temperatureessrainationin per impacttivitytureing
rgye
weightameter

400 Erosion/Corrosion
135 mm sand at 2.1% w/w concentration over5 h test duration. As these results are for nor-mal impingement erosion, the failures of theductile surfaces should be related to accumu-lated plastic strain or low-cycle fatigue inducedby cyclic plastic deformations from successiveimpacts. This would lead to the erosion rate Er,expressed in mass of material removed per massof impacting particles, being proportional toH�1.5, as given in eqn [2]. For tests where theerodent size and concentration are held con-stant, the erosion rate Er and Vu areequivalent. In eqns [1] and [2], K and K1 areconstants, rT is the density of the material beingeroded, rP is the density of the erosive particle,UP is the particle velocity, f(y) is the angle ofimpact dependency function, and ec is the criti-cal plastic strain at which detachment of weardebris occurs. Ductile surfaces show a Vu _
H�1.6 trend, which is nearly as predicted byeqn [2]. The erosion dependency on hardnessfor brittle surfaces is more complex with the-ories predicting between Vu _ H�0.25 and Vu _
H0.1 (Hutchings, 1992). Figure 2 shows that theerosion rates of brittle engineering surfaceshave a much increased sensitivity to hardnesswith erosion rate proportional to H�3.2. Thistrend, it should be noted, only has a correlationfunction R2 value of 0.67 and is heavily skewedby chemical-vapor deposition (CVD) diamondthat has a hardness of 80 GPa (,8000 Hv):
Er ¼K1rTrp
1=2Up3
ec 2H3=2½2�
For cases where the surface hardnessequals the erodent hardness (sandhardness¼ 1100 Hv), considerable scatter inthe data is seen. The conclusion from this isthat the selection of surfaces with increased sur-face hardness may result in increased erosionresistance. However, the erosion mechanismsmay change from ductile to brittle ones andextreme care is required when selecting surfacesof around 1100 Hv to resist sand erosion. Suchsystems result in highly uncertain erosion andtherefore erosion–corrosion rates. This intro-duces another important ratio, that of relativehardness between the erodent and target surface.
As discussed above, the hardness of the par-ticle Hp involved in erosion can have a majorinfluence on the erosion rate. If the particlehardness Hp is lower than that of the compo-nent surface hardness Ht (i.e., Hp/Ht < 1),much less wear will result compared to harderparticles where Hp/Ht > 1. For cases where Hp
is much greater than Ht, the exact value of Hp
matters far less as the rate of wear is relativelyinsensitive to hardness ratios Hp/Ht > 10 (see
Hutchings, 1992). Simple contact mechanicsshows that high levels of wear can be expectedwhen particles are 1.25 times harder than thesurface. The hardness of sand, a typical abra-sive particle, is about 1000–1200 Hv and issignificantly higher in hardness than most steelalloys, thereby indicating that steels are vulner-able to sand erosion. Even surfaces containinghard phases (carbides), such as thermallysprayed cermets, will have softer binder phaseswhich are susceptible to abrasion. Ceramics, onthe other hand, offer hard and homogeneoussurfaces to combat plastic deformation andinhibit erosive wear. Unfortunately, they sufferbrittle fracture failures under high stresses dueto their inherently low fracture toughness.
Similar to reducing sliding wear, perhapsconsideration should be given to controllingerosion by selecting surfaces with high H/Em
(hardness/Young’s modulus) ratios. Such sur-faces can absorb high levels of energy elasticallyas well as have high resilience and toughness(Matthews, 2005), although replotting the datafrom Figure 2 as erosion rate versus H/Em
shows little correlation.Other research has pointed to similar trends of
erosion rate with hardness. For example, thewear environment of steels used for containing,transporting, and processing erosive mineralslurries often encounter fluid-borne particlelayers that move at high speed across the wear-ing surface (Wood et al., 2004; Wood and Jones,2003). Information on the performance rankingof such materials is limited, particularly withrespect to the influence of steel hardness andmicrostructure on the resistance to erosion.This is particularly important for the oil sandsindustry of Northern Alberta, Canada, wherehandling and processing of essentially silica-based solids (tar sands) results in extremelysevere wear conditions. Clark and Llewellyn(2001) present slurry erosion data obtained oncommercially available wear-resistant pipelinesteels with hardness varying from 220 to740 Hv. They conclude that the erosion resis-tance of a hard internal surface of AISI 1045steel pipe (740 Hv) was more than 5 timesgreater than standard, nonhardened, AISI 1020carbon steel (CS) pipeline material (220 Hv).However, they note that the best erosion perfor-mance was obtained for steel with homogeneousmicrostructure with a hardness approaching thatof the silica sand erosion medium, namelyHp¼ 1000 Hv and Hp/Ht¼ 0.75.
Corrosion-resistant alloys (CRAs) are widelyused to resist flow corrosion. For example,chromium is added to improve the resistanceto flow-induced corrosion to CS. The effect ofthe different chromium addition levels on per-formance is reviewed by Poulson (1999).

Erosion–Corrosion Fundamentals 401
Figure 14 shows the trend for such a passivesystem as a function of flow velocity and itsvulnerability to mechanical processes thataccelerate corrosion loss rates (passive meansthe surface has a propensity to form a protec-tive surface film or layer with high impedanceand thus suppresses charge transfer at themetal–liquid interface). In general, corrosion-resistant alloys do not resist erosion well dueto their low hardness, and the interactions(synergy and additive effects) that exist betweencorrosion and erosion are not well understood.This presents a dilemma for those seeking ero-sion–corrosion-resistant surface selections.Also, cost-reduction considerations favorreplacing expensive solid alloy componentswith coatings on CS substrates, hence consider-able effort is now being made to researchcoating performance under erosion–corrosion.
6.09.2.1.2 Coatings
The relatively cheap option of organic coat-ings tend to perform relatively poorly underhigh-energy solid-particle impingement. Theycan be used as corrosion-barrier coatings withinlow-energy flow components (Puget, 1999),whereas ceramic materials are usually tooexpensive to use, except in particularly criticalapplications. Sprayed metallic coatings are arelatively unexplored possibility for this duty.The most likely metallic coating materials forthermal spray systems, on cost grounds, arealuminum, copper, nickel, and zinc, theiralloys, and possibly composite materials basedon them. For highly aggressive (very energeticflows), cemented carbides of WC-CoCr or WC-NiCr or other carbide system (TiC or CrC)cermets are used either in sintered form or ther-mally sprayed by detonation type or high-velocity oxyfuel (HVOF) thermal spray guns(Percy, 1990; Wood et al., 1997; Wheeleret al., 2005; Allen and Ball, 1996).
To achieve long-term corrosion resistance, it isimportant to understand the consequence ofselecting anodic and cathodic coatings relativeto their substrate. For example, zinc and alumi-num are both anodic to CS, that is, they protectsteel galvanically in seawater, and are used inoffshore applications for this purpose(McIntyre, 1999; Puget, 1999; Percy, 1990).Copper and nickel are both cathodic coatings,that is, they are not protective to steel. Wheredefects in the coating occur, exposed steel is likelyto be rapidly corroded, adding to erosion–corro-sion attack and coating delamination. So, ifcopper or nickel or their alloys are used as coat-ings, they should be defect free. If not, a sealantshould be used to protect against electrolyte
ingress and permeation into the coating viainterconnecting defects. A cautionary noteshould be made here as defect-free coatingsare rarely achievable and even if defects areminimized and sealed, erosion–corrosion pro-cesses can readily generate defect sites throughinduced stress systems. Such conditions exploitdefects near to critical size for growth, inclu-sions, and any anisotropy in the near orsubsurface microstructure to grow defect fields,and eventually accelerate wall loss rates. Hence,for erosion resistance, modern surface engineer-ing research is looking into depositinghigh-quality and high-density (<1% porosity)coatings with a wide range of carbides alongwith the above metal-binder elements with theaim to achieve good adhesion between carbideand binder. These should successfully combinecorrosion- and erosion-resistant elementstogether. Recent research has shown that eventhis solution has difficulties; as Souza andNeville (2005) report, the performance ofWC–Co–Cr systems can suffer localized corro-sion of the carbide phases, therebycompromising the performance of such surfaces.
There are a number of factors that affect thebehavior of materials when they are subjectedto erosive and corrosive flows. These can beplaced in four categories: (1) the nature of thefluid transporting the particles (liquid or gas-eous), (2) the nature of the particles, (3) the flowfield, and (4) target parameters. They are sum-marized in Table 2.
6.09.2.1.3 Environment factors
Corrosion is a reaction process on metallicsurfaces that occurs as a result of interactionwith the environment. The rates and modes ofcorrosion attack are related to the electrolyteenvironmental conditions such as pH, dissolvedoxygen, salinity, temperature, flow structure,and biofouling.
The formation and influence of biofilms oncorrosion and erosion–corrosion has, by andlarge, been ignored to date but it can have asignificant impact on system performance. Inindustrial processes, the presence of biofilms onmetallic surfaces can cause serious equipmentmalfunction as well as lower the efficiency ofcomponents such as heat exchangers. Biofilmscan also lower the end-product quality or safetyin the food industry (Carpentier and Cerf 1993;Flemming, 2002). Knowledge of the fundamen-tal mechanisms that govern the interaction ofbiofilms with metals in marine, fresh-water,and industrial environments is essential toavoid the environmental problems caused bybiofouling and biocorrosion. Any surface

Table 2 Principal factors that affect solid-particle erosion of materials
Category Factor
Nature of the fluid ViscosityDensityCorrosivity – such as salinity, pH, dissolved oxygen, conductivity, solubilityof species, concentration of active species
Temperature
Nature of the particles SizeDensityFriability (crush strength)ShapeParticle–target hardness ratio
Flow field Particle velocityParticle kinetic energyParticle–particle interactionsImpact angleParticle fluxParticle-impingement efficiencyParticle dropoutAsymmetry of particle burden
Target parameters HardnessElastic modulusFracture toughnessResidual stressSurface roughnessSurface treatmentSize and distribution of microstructural flawsCoefficient of restitution
402 Erosion/Corrosion
immersed into an aquatic environment willquickly adsorb dissolved organic and inorganicmatter, which forms a discontinuous film ofvariable thickness, thereby conditioning the sur-face (Loeb and Neihof, 1977; Taylor et al.,1997). The conditioned surfaces are then colo-nized by pioneering microorganisms includingbacteria, microalgae, and fungi. Such attach-ment and growth of microorganisms onsurfaces are generally defined as a biofilm orcalled microfouling.
The initial bacterial attachment to a metalsurface and the subsequent formation of a bio-film will be dependent on surface characteristicsof the substratum, including metal surface freeenergy, roughness, and hydrobicity (Mulleret al., 1992), as well as metallurgical features(Walsh et al., 1993). In addition, the biochem-ical characteristics and the extracellularpolymeric substances (EPSs) have also beenreported to be crucial in biofilm formation(Jucker et al., 1998). EPSs are primarily com-posed of polysaccharides, uronic acid, andproteins containing functional groups, such ascarboxylic acid and amino acid groups, whichcould be capable of binding metal ions(Geesey et al., 1988; Paradies, 1995). Thus, theEPS can affect the electrochemical characteris-tics of a metal surface and play an important
role in the corrosion and erosion–corrosion ofmetals (Roe, 1996).
The extent of marine growth depends on anumber of different environmental factors suchas the geographic location, season of the year,water chemistry, temperature, substratum type,sunlight, distance from the shoreline, and condi-tions of turbulence. Microbial attachment hasbeen observed at wall shear stresses in theorder of 100–300 N m�2 (Duddridge et al.,1982; Finlay et al., 2002). It has been suggestedthat biofilms formed under high fluid velocitiesare thinner and denser in structure or consist ofcell clusters which exhibit a greater resistance todetachment than single cells (Finlay et al., 2002;Melo and Vieira, 1999; Wijeyekoon et al., 2000).Therefore, biofilms are very environmentallysensitive and under low particle impingement,erosion conditions may well play a role in deter-mining erosion–corrosion surface loss rates.
The influences of other environmental fac-tors, such as flow velocity, pH of the solution,and the system temperature, on erosion–corro-sion are likely to be very system dependent.However, the sensitivity of wall wastage ratesto such environmental parameters can be foundin the literature. Kim et al. (2003) report howthese parameters effect the galvanic corrosionof CS in alkaline chloride solutions. They

Erosion–Corrosion Fundamentals 403
studied the aqueous corrosion characteristics ofa CS coupled to type 304 (UNS 530400) stain-less steel in deaerated solutions as a function ofvelocity, pH, and temperature. They found thatthe galvanic corrosion between CS and type 304stainless steel was accelerated by the presence ofan oxide layer formed on the active CS. Thisresulted in extensive corrosion of the anode,CS, while the stainless steel was cathodicallyprotected from corrosion. The galvanic currentdensity increased with increasing flow velocity(between 0 and 0.6 m s�1) and temperature(between 25 and 75 �C), but decreased withincreasing pH from 8 to 10. Flow velocityeffects were only significant at 50 and 75 �C.This effect can be explained by the increasedsolubility of magnetite (corrosion oxidationproduct) at the higher temperatures.
A guide to system performance for solutionswith different pH can be found by reference tothe relevant potential–pH (Pourbaix) diagram.This approach has been illustrated by Stack andJana (2005) in their regime-mapping approachto erosion–corrosion.
The influence of the bulk oxygen concentra-tion, Cb,O2
, in aqueous environments on thecorrosion rate depends on the controlling cor-rosion mechanisms, which will be discussed ingreater detail later in the chapter. However,when the system is under mass-transport con-trol, the corrosion rate can be found to bedirectly proportional to Cb,O2
, or Cb,O2
n, wheren is flow and system dependent.
Temperature is an important environmentalvariable which can influence erosion–corrosionrates. In aqueous solutions, temperature notonly influences pH, solubility of gases (i.e., oxy-gen and carbon dioxide), and ionic species aswell as diffusion rates of reactant species, butcan also affect the kinetics of oxidation reactionat the oxide/metal interface and the reduction(dissolution) reaction of oxides at the oxide/water interface. Added complications can occurwhen elevated temperatures increase hydrogendiffusion rates and if this effect is coupled witha surface susceptibility to hydrogen embrittle-ment, then increased wall loss may result.
Another major environmental factor with sig-nificant influence on erosion–corrosion rates isthat of flow velocity but it should be set in con-text of the overall flow field as other parameterssuch as wall shear stress, wall surface roughness,turbulent flow intensity, and mass-transportcoefficient (this determines the rate of movementof reactant species to reaction sites and can thusrelate to corrosion wall wastage rates). Forexample, a single value of flow velocity referredto as the critical velocity is often quoted to repre-sent a transition from flow-induced corrosionto enhanced mechanical-corrosion-interactive
erosion–corrosion processes. It is also used toindicate the resistance of the passive and protec-tive films to mechanical breakdown (Hu andNeville, 2005). However, it should be remem-bered that a single value of free stream velocitycan result in widely different flow-field structuresthat are dependent on the Reynolds number ofthe flow geometry and type and thickness ofboundary layer induced at the liquid/solid inter-face. These factors will directly affect the velocityprofiles and transverse momentum transfer closeto the solid/liquid interface, which will be shownlater to dictate wall shear stress levels and mass-transport efficiencies. Therefore, critical velocityvalues are very geometry or test-rig specific andcannot be readily applied to predict componentservice life in generic flow systems.
6.09.2.1.4 Geometry factors
The geometry of components exposed to ero-sion–corrosion can have a significant influenceon the levels of surface wastage suffered. Fromclassical erosion studies, it is well understoodthat ductile surfaces suffer least solid-particleerosion damage under normal impact conditionswhereas they are vulnerable under 30� impinge-ment in gas–solid flows or between 20� and 30�
in slurry flows. Brittle surfaces, on the otherhand, are more vulnerable under normal impactconditions rather than lower angle impinge-ments. This finding has major implications forflow component geometry should erosion anderosion–corrosion need to be minimized.
Flow-enhanced corrosion can be at its mostsevere in the vicinity of flow disturbances. In thepast, flow-enhanced corrosion under disturbedflow conditions has been studied experimentallyin flow loops and numerically by performingflow simulations. Recent studies such as Nesicet al. (2000) investigate flow corrosion underdisturbed flow condition using a modified rotat-ing cylinder geometry with a sudden step. Largevariations in the wall mass-transfer rates, similarin character to those obtained by a sudden pipeexpansion, were observed behind the step. Flowsimulations show that this flow geometry willcreate a qualitatively similar mean flow patternto that of a sudden pipe expansion flow invol-ving flow separation and reattachment.
To understand the wear of pipe bends, anerosion model that relates particle impacts tovolume loss is required. However, slurry ero-sion is a complex and under-researched area,and thus robust models have yet to be devel-oped. This is certainly true for erosion ofpipelines and is compounded by the fact thatmost published literature on the wear of pipework relates to pneumatic conveying systems.

404 Erosion/Corrosion
Understanding the particle trajectoriesthrough bends is of great importance if wearrates are to be predicted at specific locations.Blanchard et al. (1984) attempted a two-dimensional model of particle trajectories inliquid flows within bends but with limited suc-cess due to the inability of the model to predictsecondary flows. Forder (2000) has studiedsolid-particle trajectories in liquid flows inpipe-bend geometry before modeling morecomplex flows in choke valves using a com-mercial computation fluid dynamics (CFD)code. He extended a commercial CFD pro-gram to include a predictive erosion elementbased on a combined deformation and cuttingerosion model, detailed later. The model wastested by comparing the predicted wear ratesand wear locations in pipe bends with theexperimental air/sand erosion results ofBourgoyne (1989), with excellent correlations.Further experimental wear results for pipebends could be used to test this approach inthe future, as reported by King et al. (1991)and Wiedenroth (1984), for a limited range ofbend geometries, materials, and solid–liquidflows. Chen et al. (2002, 2004) have includeda stochastic rebound model in a similarapproach to Forder to investigate the model-ing of erosion in elbows and plugged tees. Thestochastic rebound model was found to havelittle effect on the predicted erosion of elbowssubjected to sand–water mixtures while differ-ences were seen in the plugged tee geometryexposed to air–sand flows.
The redistribution of solids inside horizontalbends for multisized particulate slurries hasbeen experimentally studied by Ahmed et al.(1993). Conclusions from this work point tothe redistribution of large particles outward asthe likely cause of rapid bend erosion. Knowing
(a)
NONE SEI 15.0kV ×1,200 10 μm WD 19.2 mm
Figure 3 SEM micrographs at two magnifications shposition; after 210 h). FromWood, R. J. K. and Jones, Twear of AISI 304L stainless steel pipes by pilot-scale an
the distribution of particles in flows (particleburden) and the motion of particles in flowsystems is a major point to consider and therecurrent theme in this chapter.
Experimental studies on pipe systems showvariation of the erosion mechanism and loca-tion with flow regimes. Wood et al. (2001,2002a, 2002b) show erosion damage of AISI304L stainless steel pipe components with anominal wall thickness of 5 mm from a hori-zontal pipe loop test. The pipes were of 80 mmnominal bore, although the actual mean of aseries of measurements was 77.8 mm. The ero-sion of the bend with the greatest curvature ofthe whole loop (Rc/Db¼ 1.2) was analyzedalong with its upstream straight.
Figure 3 shows the top internal surfaces (12o’clock position) of the straight pipe after 210 hof slurry testing at 3 m s�1 with an asymmetricslurry flow of 10% w/w sand of 500–1400 mm insize within water. Figure 4 shows the overallcomponent details for the straight and bentsections investigated. The damage in Figure 3is consistent with that of the as-manufactured(scaled) surface finish. There appears to be nosignificant erosion impact damage although afew individual impact craters are seen due toimpacts from the relatively few sand particlesthat are entrained into the energetic upper fluidflow. The lack of damage seen in Figure 3 is incontrast with the damage seen at the bottom ofthe straight pipe section as shown in Figure 5.This reflects the asymmetry of sand burden inthe flow with the majority of sand particlestraveling in the bottom half of the pipe withonly a few energetic particles saltating into theflow stream in the top half of the pipe.
In Figure 5, the impact features reveal thatthe erosion processes occurred by a simulta-neous plastic deformation and microcutting of
(b) NONE SEI 15.0kV ×100 10 μm WD 19.2 mm
owing surface morphology of straight position (top A. F. 2003. Investigations of sand–water induced erosived laboratory-scale testing. Wear 255, 206–218.

(a) (b)
Figure 5 a, SEMmicrographs showing the surface morphology of the straight pipe at the bottom (position E)after 210 h; b, individual impact scars from sand microcutting at low-angle impingements with the pipe surface.From Wood, R. J. K. and Jones, T. F. 2003. Investigations of sand–water induced erosive wear of AISI 304Lstainless steel pipes by pilot-scale and laboratory-scale testing. Wear 255, 206–218.
3
1
2
1A
B
C
DEF
G
H
Flow into page
Weld
Flow
Figure 4 Drawings of bend and straight sections which were mounted horizontally and subjected to asymmetricslurry flow for 210 h. FromWood, R. J. K. and Jones, T. F. 2003. Investigations of sand–water induced erosivewear of AISI 304L stainless steel pipes by pilot-scale and laboratory-scale testing. Wear 255, 206–218.
Erosion–Corrosion Fundamentals 405
the stainless steel pipe surface, similar to type IIcutting mentioned by Hutchings when the ero-dent rotates backward on impact and efficientlymachines the surface (Hutchings, 1992).
Erosion of the bend outer wall at section 2(shown in Figure 4) is even more intense asshown in Figure 6. The surface of the bend atposition C (3 o’clock) has clearly been erodedwith evidence of low-angle impingements withextensive plastic deformation and cutting (typeII) resulting in the removal of the as-manufac-tured surface morphology. This level of damageis a result of impingement by the larger andenergetic sand particles with the bend wall. Itreflects the repositioning of the particle burdendue to the bend geometry and resulting changein flow direction.
6.09.2.1.5 Galvanic interactions
Galvanically driven corrosion typicallyresults from coupling dissimilar alloys with themore anodic (electronegative) surface
dissolving at an enhanced rate compared withuncoupled rates. The cathodic (electropositive)surface typically becomes protected and is lesslikely to corrode. The range of potentialsexperienced by various metals and alloys canbe listed in the form of galvanic series based onpractical observations in a specific environ-ment, such as seawater, as illustrated inTable 3 (Trethewey and Chamberlain, 1995).
The extent of such galvanically coupledcorrosion relies on numerous factors such assurface area ratios of the anodic surfaces tocathodic surfaces, solution conductivity,flow-field intensity, temperature, and the effi-ciency of the electropositive surface to act asthe cathode (which in turn controls the rateof reduction). Dissimilar alloys are foundcoupled to each other in flow systems.Typically, designers generate galvanic couplesunintentionally and rapid wall thinning canresult in areas close to these couples. Suchsevere corrosion attack results from interac-tions between the enhanced corrosion ofgalvanic coupling and flow-assisted corrosion

Figure 6 Micrographs showing the surface morphology of bend erosion outer wall at section 2 and position C.Both images show impact craters with extensive plastic deformation and cutting damage. Wood, R. J. K. andJones, T. F. 2003. Investigations of sand–water induced erosive wear of AISI 304L stainless steel pipes bypilot-scale and laboratory-scale testing. Wear 255, 206–218.
406 Erosion/Corrosion
or even erosion–corrosion. These types ofprocesses act to destabilize protective surfacefilms. The growth of calcareous films on thecathodic areas of galvanic couples (known aschalking) can be beneficial to suppress chargetransfer by increased electrode/solutionimpedance.
Al-Hosani et al. (1997) have studied thegalvanic corrosion induced by coupling ofcopper-based alloys to Mo-stainless steels instatic Arabian Gulf seawater under a varietyof conditions including temperatures, cathode-to-anode area ratios, and stirring. For staticconditions, the corrosion rates were found tobe proportional to the cathode/anode arearatio. This can be attributed to the fact thatthe cathodic reaction (the reduction of oxygen)controls the overall corrosion process, and thisis diffusion controlled. However, the galvaniccorrosion rate of the couples increased non-linearly with a rise in temperature to reach amaximum at 50 �C, decreasing sharply athigher temperatures due to the decrease indissolved oxygen at this temperature. Theeffect of stirring the electrolyte shifted theopen circuit potential (OCP) of the stainlesssteel to a more electronegative value. Thus,the corrosion rates in the stirred solutionswere found to be between 1.33 and 3.0 timesabove those measured in stagnant solutions.
Erosion–corrosion conditions can themselvesdevelop local microgalvanic cells between erodedand uneroded surface areas. Such microgalvaniccells have been reported between erosion-affected regions (depassivated) of a surface andnoneroded regions (passive). For example,enhanced material loss rates due to such cellsare reported by Hodgkiess et al. (1999).
6.09.2.2 Electrochemical Reaction Kinetics
6.09.2.2.1 Kinetics under polarization
(i) Activation polarization
The rate of charge transfer across a metal–solution interface and the mechanisms ofcharge transfer and their control are clearlyimportant to understand if wall wastage ratesare to be minimized in erosion–corrosion.Typically, these occur by coupled oxidationand reduction reactions. The rate of chargetransfer can be represented by the anodic (oxi-dation) and cathodic (reduction) currentsassociated with the reactions occurring atanode and cathode sites on a metallic surface.These currents can be related to the potential ofthe surface. Under uncoupled and equilibriumconditions an electrode potential is referred toas either the equilibrium potential Eeq, OCP, orfreely corroding potential Ecorr. If the surfacepotential is polarized, for example, by galvaniccoupling or applying a potential, the level ofpolarization is given by the difference betweenthe electrode potential and Eeq. Polarizationof an electrode supporting one reduction–oxidation system is given by the Butler–Volmer eqn [3]:
I ¼ I0 exp �b zF
RTyZact
� �� exp ð1�bÞ zF
RTyZact
� �� �½3�
where I is the anodic or cathodic current, I0 isthe exchange current density, � is the charge-transfer barrier coefficient for the anodic orcathodic reaction (� is typically 0.5), z is the

Ecorr
corr
log current density (A m–2)
Pol
ariz
atio
n (V
)
βc
βa
Figure 7 Schematic of Tafel plot (Pletcher, 1991).From Pletcher, D. 1991. A First Course in ElectrodeProcesses. The Electrochemical Consultancy, Romsey.
Table 3 Galvanic series in seawater (Trethewey andChamberlain, 1995)
MetalPotential (V vs SCE)(approximate)
Ni–Cr–Mo alloy C �0.030 to þ0.090Titanium �0.050 to þ0.060Ni–Cr–Mo–Cu–Si alloy B þ0.020 to þ0.040Ni–Fe–Cr alloy 825 �0.020 to þ0.040Alloy 20 stainless steels,cast and wrought
�0.040 to þ0.060
316, 317 stainless steel 0.000 to �0.100(�0.350 to �0.450)
Nickel copper alloys 400and K-500
�0.050 to �0.150
302, 304, 321, 347stainless steel
�0.040 to �0.100(�0.475 to �0.580)
Silver �0.100 to �0.150Nickel 200 �0.100 to �0.200Silver braze alloys �0.100 to �0.200Nickel chromium alloy600
�0.125 to �0.175
Nickel aluminum bronze �0.150 to �0.22070/30 Copper nickel �0.180 to �0.225Lead �0.200 to �0.240430 Stainless steel �0.200 to �0.28080/20 Copper Nickel �0.220 to �0.28090/10 Copper nickel �0.225 to �0.290Nickel silver �0.260 to �0.280416 and 410 stainless steel �0.260 to �0.330
(�0.460 to �0.560)Tin bronze �0.265 to �0.320Silicon bronze �0.270 to �0.290Manganese bronze �0.290 to �0.340Admiralty brass,aluminum bronze
�0.290 to �0.350
Lead tin solder 50/50 �0.290 to �0.375Copper �0.300 to �0.360Tin �0.300 to �0.320Naval brass, yellow brass,and red brass
�0.300 to �0.390
Aluminum bronze �0.320 to �0.410Austenitic nickel cast iron �0.420 to �0.530Low alloy steel �0.570 to �0.630Mild steel, cast iron �0.600 to �0.720Cadmium �0.700 to �0.730Aluminum alloys �0.750 to �0.990Beryllium �0.970 to �0.990Zinc �0.990 to �1.020Magnesium �1.600 to �1.640
Values in brackets indicate low-velocity or poorly aerated
water, and at shielded/occluded areas.
Reference electrode SCE¼ saturated calomel electrode.
Erosion–Corrosion Fundamentals 407
number of electrons transferred,�act ¼ Eapplied � Eeq. For anodic overpotentials,
Ireaction ¼ Ia ¼ �I0 exp ð1� bÞ zF
RTyZreaction
� �½4�
So
Za ¼ ba log10Iaj jI0
� �½5�
where ba is the Tafel coefficient which cansometimes be obtained from the slope of plot-ting � versus log jIj with the intercept yielding avalue for I0:
ba ¼ 2:303RTy
ð1� bÞnF ½6�
For cathodic reactions,
Ic ¼ I0 exp �b nF
RTyZc
� �� �½7�
leading to
Zc ¼ bc log10Ic
I0
� �½8�
bc ¼ �2:303RTy
bnF½9�
Figure 7 illustrates Tafel slope extrapolation toallow the OCP (Ecorr) and corrosion currentdensity (icorr) to be evaluated.
The discussion so far has focused on thekinetics of reactions occurring at the metal/solution interface. However, the transport ofthe corrosion reactants/products through thesolution is also important because of the timeit takes. Unlike the passage of electrons, that is,where the current flow through a metal isdeemed to occur in a negligible time comparedwith other processes, the current flow through asolution is carried by species much more mas-sive than electrons. Thus, mass transportduring an electrochemical process/corrosion iscarried out by diffusion, migration, and convec-tion. Diffusion arises due to concentrationgradients and it must occur whenever there isa chemical change at the electrode surface.Migration is the movement of charged speciesdue to potential gradients while convection isthe movement of a species due to mechanical

408 Erosion/Corrosion
forces (Pletcher, 1991). However, themass-transfer regime within the electrolyte isnot completely diffusion dependent.
(ii) Diffusion-controlled polarization
For diffusion-controlled mass transport, theflux of species i is described by Fick’s first law:
Ji ¼ �Di�Ci
�x
� �½10�
where Ji is the flux of species i (mol s�1 cm�2),Di is the diffusion coefficient of species i(cm2 s�1), and DCi/Dx is the concentration gra-dient of species i across the interface (mol cm�4)(see Figure 8).
The diffusion coefficient of ionic species indilute solutions can be estimated by the Nernst–Einstein eqn [11]:
Di ¼RTylijzij2F2
½11�
where zi is the valence of the species, li is themolar conductivity.
For flow over the surface or moving electrodes,the concentration–distance profile at the electrodesurface can be approximated by a simple gradient.
Because the concentration gradient DCi/Dx ismaximum when the surface concentration ofspecies i is zero then
Ji ¼ DiCbulk
i
d
� �½12�
where � is the diffusion layer thickness.Converting the flux of species Ji into an
equivalent current density with Faraday’s law
ic ¼ iL ¼ �nFJi ¼ �nFDiCbulk
i
d
� �½13�
Here, iL is also the anodic current density whencathodically controlled which is the case formany engineering situations.
x = δ x
C = Ciδ
Concentration
Distance from electrode surface x = 0
Electrode Bulk solution
Figure 8 Concentration profile at the electrode/solution interface.
(iii) Limiting current density
By considering electrode reactions involvingonly one species, the subscript i can be omitted.Thus
i ¼ �nDF�C
�x¼ �nDF
Cb � C0
d½14�
C0 represents the reactant concentration at theelectrode. As the potential is further decreased,ions are consumed faster by the electrode reac-tion, resulting in a lower concentration at theelectrode. Because �, the boundary-layer thick-ness, is determined by the flow, and the bulkconcentration is fixed, the decrease in C0 bringsabout a higher current. Because the concentra-tion at the electrode cannot be less than zero,there is a limit; this mass-transport-limiting cur-rent is determined by setting C0¼ 0 in eqn [14]to obtain eqn [15]:
Ilim ¼ �zFDCb
d½15�
The limiting current Ilim is an importantdesign parameter because it represents the max-imum rate at which an electrode reaction canproceed. Moreover, it provides a convenientway to measure transport rate, because mas-s-transport coefficients can be readily andaccurately calculated from the experimentallyobtained current plateau.
6.09.2.2.2 Mass-transfer coefficient
Mass transfer can significantly affect the reac-tions rates and therefore corrosion rates and areparticularly important in erosion–corrosion con-ditions. A useful parameter used to developpredictive models for flow-assisted corrosion anderosion–corrosion is the mass-transfer coefficient.The mass-transport coefficient, km, is defined by
J ¼ km�C ¼ kmðCb � C0Þ ½16�
Representing the flux in terms of the current
km ¼Ilim
zFðCb � C0Þ½17�
The only parameter on the right that cannot bereadily measured is C0; however, at the limitingcurrent, C0 is zero (Racz et al., 1986), providing
km ¼Ilim
zFCb½18�
6.09.2.3 Fluid Flow Fields
6.09.2.3.1 Turbulence
The relationships between fluid mechanicsand induced flow patterns for both open and

(a) (b)
(c)
Figure 9 Ripple formation due to turbulence eddiesand the relation between microroughness and eddysize: a, initial stage with turbulence boundary layer,microroughness determined by prior machiningoperations; b, intermediate stage with larger eddiesdue to changing surface roughness (microroughnessdetermined by the individual erosion event); c, finalstage with steady ripple pattern. After Karimi, A.and Schmid, R. K. 1992. Ripple formation in solid–liquid erosion. Wear 156, 33–47.
Erosion–Corrosion Fundamentals 409
closed fluid systems are covered extensively inundergraduate text on fluids mechanics such asDouglas et al. (2005) and therefore will not bereproduced here. Such textbooks detail the dif-ferences between laminar and turbulent flowand their importance on near-solid-wall shearstresses and near-wall flow structures. It is thesenear-wall flow conditions that are important tounderstand if erosion–corrosion rates and loca-tions are to be accurately quantified forengineering components, in particular, thedevelopment of eddy structures in turbulentflows through lateral momentum transferbetween fluid elements. These in turn disruptthe turbulent boundary layers that are devel-oped within near-wall flows (Cantwell, 1981;Robinson, 1991; Panton, 1984) and require par-ticular attention, as these can develop localizeddamage patterns on solid surfaces that can leadto accelerated loss of fluid containment andthus decrease component life considerably.Two examples are given below, namely, rip-pling in pipe flows and turbulent bursting/jetting flows over flat plates:
(i) Rippling of pipe surfaces by erosion–corrosion induced by near-wall turbulence
In the cases of multiphase flows(solid–liquid), it is assumed that initially theturbulent eddy pattern in the flow is determinedby the surface roughness generated by the finalmachining operation of the pipe (see Figure 3).The ability of the sand particles to erode islargely determined by the bulk flow but willresult in the modification of the surface rough-ness. The initial surface roughness is thusreplaced by the roughness resulting from indi-vidual erosion events and varying depths ofcorrosion driven by the varying flow andmass-transport conditions near the pipe wall(Figure 9a). In a ductile material, such as stain-less steels, and for erosion-dominated erosion–corrosion, this roughness will be in proportionto the impact scar dimensions (Figure 9b).These in turn give rise to a new eddy patternin the near-wall flow. During the erosion pro-cess, the sand particles have to pass throughthese eddies and are thereby deflected. Theeddy pattern determines the angle of impactand areas of increased sand-particle impactand also the flow corrosion rates over thesurface. The concentration of damage at spe-cific points results in the establishment of aripple pattern, reflecting the turbulence pat-tern. The surface waviness increases until asteady state is reached at which point thesurface continues to wear but the wavelengthand shape remain constant (Figure 9c). Thefinal waviness is thus a reflection of the
conditions that the material is exposed to.The more severe the condition the greater isthe turbulence in the boundary layer andhence the larger is the surface waviness.
(ii) Turbulent burst and near-wall flow jetting
The near-wall region can be divided intothree distinct regions: (1) the viscous sublayer,(2) the buffer layer, and (3) the fully turbulentregion (also known simply as the log region).Turbulent features are often reported withreference to the dimensionless scale yþ ¼ v*y/�, where v* is the friction velocity (¼�w/ orwall shear stress over fluid density), y is thevertical height above the surface, and � is thekinematic viscosity of the fluid. The viscoussublayer extends from the wall out to aboutyþ ¼ 5–8. In this region, the mean velocity pro-file is linear, as if the region is devoid ofturbulence. However, flow visualization hasrevealed slow-moving oscillations known asnear-wall or sublayer streaks (Donohue et al.,1972; Kline et al., 1967). These streaks areabout 100 yþ units across and 1000 yþ unitslong and are believed to occur as a result ofelongated regions of alternating low- andhigh-speed fluid produced by streamwise vor-tices close to the wall. The near-wall streaksslowly lift up into the buffer region, wherethey undergo a distinct oscillation and finallybreak up violently around yþ ¼ 40 (seeFigure 10) (Kim et al., 1971; Blackwelder,1989). The majority of the turbulence produc-tion in the entire boundary layer occurs in thebuffer region from yþ ¼ 8 to 30–50 during vio-lent outward ejections of low-speed fluid. Forcontinuity considerations, the ejections are fol-lowed by an inrush of high-speed fluid at a

v ′
2 1
43Sweep
Ejection
y+ = 30–50
y+ = 5–8y+
= 0
u ′ u ′ < 0v ′ > 0
u ′ > 0v ′ < 01
1 – Near-wall streak2 – Liftup into buffer region3 – Violent breakup of ejection into outer region4 – Inrush of high-velocity fluid to wall (sweep)
2 4
Flow3
Figure 10 Schematic showing the near-wallturbulence structures within the viscous sublayer,buffer layer, and fully turbulent region. FromWharton, J. A. and Wood, R. J. K. 2004. Influenceof flow conditions on the corrosion of AISI 304Lstainless steel. Wear 256, 526–536.
410 Erosion/Corrosion
shallow angle toward the wall (a sweepmotion). An ejection transports low-momentumfluid from the wall region into the main flow.Conversely, sweep events transporthigh-momentum fluid from themain flow towardthe wall (Figure 10) at velocities close to 0.9U,where U is the free stream velocity. The result ofthese flows is fluctuating wall shear stresses (seeeqn [19]), and pressures which will influence ero-sion–corrosion rates and mechanisms locally.
6.09.2.3.2 Wall shear stresses
The wall shear stress can be calculated from
�w ¼ ðmþ ZeÞdU
dy½19�
where m is the dynamic viscosity of fluid, �e isthe turbulent eddy viscosity, and dU/dy is thevelocity gradient at the wall.
Wall shear stress is important to erosion–cor-rosion conditions as it relates to the possiblestress that could be applied to loosely adherentsurface deposits or passive films. However, it isnow thought that passive film removal and itsassociated critical velocity is related to ‘mass-transport’-induced mechanisms (surface dissolu-tion and polarization) and not wall shear stress,�w (see eqn [19]), as previously assumed.However, violent near-wall turbulent flow struc-tures, generated by streaming and bursting, couldremove or disrupt passive films and oxide layers.
6.09.2.4 Erosion Fundamentals
There are three categories of erosion depend-ing on the nature of the erodent. They are
� solid-particle impingement,� liquid-droplet impingement, and� cavitation and aeration.
To allow a focus to this chapter, only solid-particle erosion is discussed further.
6.09.2.4.1 Solid-particle erosion
Mechanical damage to a surface is possiblewhen particles are suspended and/or entrainedin energetic fluid flows impinged on surfaces.Particle contact with a surface induces surfaceand subsurface stresses, which often result in per-manent plastic deformation or removal ofmaterial from the surface. The flow conditionsalong with the properties of the target materialor any film, if present, as well as the fluid anderodent properties, will influence the contactmechanics of the erodent to component surfaceinteractions and thus influence erosion–corrosionrates. Suchmaterial properties are hardness, frac-ture toughness, coefficient of restitution, andelasticity or the degree of surface roughness. Thegeneral expression for erosion rate, W, has beenestablished empirically and can take the form
W _ _MpKf ð�ÞUpn ½20�
where _Mp is the mass of sand impacting thesurface per unit of time, Up is the particle velo-city on impact, � is the particle impact angle, Kand n (typically between 2 and 3; Faddick,1982) are constants assumed to be dependenton characteristics of the erodent/target materi-als involved. The functional relationship for thedependence of the erosion rate on the impactangle is given by f(�) (Haugen et al., 1995).
This can be rewritten for constanttemperature:
Vu ¼ Ekm f ð�ÞCvA ½21�
where Vu is the erosion rate (volume loss perimpact or m3/impact), Ek is the particle kineticenergy, m is the energy exponent with m¼ 0.5nassuming W _ d3 (where d is the particle dia-meter),Cv is the volume fraction,A is a constant,and f(�) is as before. From eqn [20] or [21], it canbe seen that the erosion rate will be stronglydependent on the kinetic energy of the impactingsand particles, the number of impacting parti-cles, and the impact angle. All three of thesefactors vary for most industrial componentsexposed to sand-laden flows and therefore, tosustain long service life, the internal surfacesmust perform over a wide range of solid impactconditions. The sand-to-wall impact conditionsare likely to depend on the flow regime present,the orientation and/or geometry of the compo-nent, the ability of the flow to keep the particlesin suspension (Turchaninov, 1973), and the rela-tive size of erodents with respect to boundary-layer thickness (small particles can formprotective clouds within subviscous layers). For

(a) (b)
Acc.V Spot Magn Det WD 10 μmSE 16.420.0 kV 5.0 2000x
Acc.V Spot Magn Det WD 10 μmSE 16.920.0 kV 5.0 2000x
Figure 11 SEMmicrographs of erosion damage on the surface of samples tested at a, 7 m s�1 and b, 12 m s�1,1wt.% silica (296 mm) sand in 0.1 M NaOH at 40 �C, test time¼ 30 min. The eroded region observed waslocated approximately normal to the flow and in the center of the sample (Harvey et al., 2006).
Erosion–Corrosion Fundamentals 411
suspended solids traveling in a horizontal liquidflow, both the solid-particle impact velocities(<3.0 m s�1) and angles are relatively low formost practical purposes (Shimoda andYukawa, 1983). Typical impact erosion cratersare shown in Figure 11.
Plots of Vu (mm3 impact�1) against kineticenergy of impact, Ek (mJ), can be used to gen-erate an erosion map. These maps enablecomparisons to be made between materials ata wide range of impact energies independent ofparticle size. Ek is defined as
Ek ¼ 2=3prprp2Up
2 ½22�
where rp is particle radius, p the erodent particledensity, andUp the impact velocity. Care shouldbe taken as experimental evidence shows erosionrates can be dependent on Up
nrpy where n and y
are far removed from 2 and 3 assumed in thesimple energy approach above (Hashish, 1998).
The main parameters of concern for erosionrelate to the solid-particle–target interactionsand thus the number of particles impinging,individual particle energies, particle impinge-ment angles, particle-to-target hardness ratios,and the shape of the particles. Near-wall parti-cle–particle interactions can also severelyinfluence erosion rates when the volume con-centration of solid particles present is high.
Finnie (1972) developed an erosion modelbased on cutting wear mechanisms of the form:
Vu ¼ C1MpUp
2
4�f ð�Þ ½23�
where C1 is an arbitrary constant denoting thenumber of particles that cut the surface and � isthe target flow stress. Gane and Murray (1979)found that a value of C1¼ 0.5 gave reasonablepredictions. Keating and Nesic (2001), innumerically predicting erosion–corrosion in
bends and sudden expansions by two-phaseflows (liquid–solid), used a modified Finnieapproach based on an earlier work by Bergevin(1984). This approach incorporated the conceptof a critical velocity for plastic deformation,Ucr.They substituted (Up sin�� Ucr) for the impactvelocity in eqn [23] to give eqns [24] and [25].
For low angles (� � 18.5�)
Vu ¼Mp Up sin��Ucr
� �2�
� Up cos��3
2Up sin��Ucr
� �� ½24�
For higher angles of impingement
Vu ¼Mp Up sin��Ucr
� �212�
cos2�
sin2�½25�
Bitter (1963) quotes a value ofUcr ¼ 0.668 m s�1 for steel. Keating and Nesicuse this value to successfully predict erosionrates in a sudden expansion and found the ori-ginal Finnie model to be not so accurate.However, modeling of erosion–corrosiondamage in a U-bend using the original Finniemodel as the modified version yielded no ero-sion due to the low particle velocities involved.Keating and Nesic conclude that their modelingneeds more experimental validation beforefurther refinements can be made.
Erosion models typically recognize that twoerosion mechanisms act. The Neilson andGilchrist erosion model, used for rocket motornozzles (Neilson and Gilchrist, 1968), incorpo-rate cutting and deformation erosion, withdiscrete models representing each. Such modelshave been successfully used by Forder et al.(1998) and Wood et al. (2001, 2002a, 2002b)to predict erosion of internal componentswithin choke valves and slurry ducts. The cut-ting erosion model for low impact angles was

Laminarflow
Corrosion
Turbulentflow
Slurry erosion
Cavitation erosion
CB
A
A = slurry erosion–corrosion B = cavitation erosion–corrosion C = turbulent flow corrosion
Figure 12 Venn diagram illustrating the possibleregions of erosion–corrosion interactions betweendifferent flow regimes and corrosion: A – slurryerosion–corrosion, B – cavitation erosion–corrosion, and C – turbulent flow or flow-enhancedcorrosion (Wood et al., 2002c).
412 Erosion/Corrosion
first proposed by Finnie (1972) and later mod-ified by Hashish (1998). The deformationmodel was proposed by Bitter (1963) and isthought applicable at higher impact angles(30��90�). Particle shape and material proper-ties for both particle and target have beenincluded which the earlier simpler models havenot considered. As the particle impingementangles are predicted to be below 10� for criticalcomponents such as straights and bends (seeWood et al., 2001, 2002a, 2002b), the contribu-tion to the overall wear rate from deformationmechanisms can be ignored. The volumetricerosion per impact can therefore be given bythe modified Hashish model only:
Vu ¼100
2ffiffiffiffiffi29p rp
3 Up
Ck
� �n
sin2�ffiffiffiffiffiffiffiffiffisin�p� �
½26�
where n ¼ 2.54 and
Ck ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi3�Rf
0:6
rp
s½27�
6.09.3 EROSION–CORROSIONMECHANISMS
Published research has tried to deal with thesynergistic effects between erosion and corrosionprocesses which result in accelerated materialloss and in some cases actually decelerate mate-rial loss (Wood, 2004a, 1992; Neville and Hu,2001;Wang and Stack, 2000;Wood andHutton,1990). A wide range of corrosion-resistant mate-rials rely on a relatively thin surface film toprovide a barrier (of high impedance) to chargetransfer (and thus corrosion) between the rela-tively active bulk material and the corrosiveenvironment. This film renders the surface pas-sive, but for fluid machinery handling flowswhere solid particles have been entrained orcavitation is induced; the passive film will beremoved by mechanical wear or bubble col-lapse/microjet/shock wave impingementprocesses. Where the film is mechanicallyremoved, charge transfer can occur at the inter-face without retardation from the barrier film(Stemp et al., 2003). This interaction betweentribological and electrochemical corrosive effectscauses materials to corrode at a substantiallyhigher rate than those experienced under staticor quiescent conditions. The possible regions oferosion–corrosion interactions between differentflow regimes and corrosion are illustrated inFigure 12. The most significant erosion–corro-sion regions are where turbulent slurry flow andcorrosion overlap in region A, hydrodynami-cally induced cavitation overlaps withcorrosion in region B, and turbulent flow over-laps with corrosion causing flow-accelerated
corrosion, although a fourth case can be envi-saged when solids entrained into laminar flowcould induce erosion–corrosion if their impactenergy is sufficient to cause plastic deformationof the surface. All of these have loosely beenreferred to in the literature as erosion–corrosionalthough in this chapter erosion–corrosion refersto only regions A and B where mechanical andelectrochemical interactions are involved. Thus,region C is referenced as turbulent flow corro-sion or flow-accelerated corrosion rather thanerosion–corrosion.
6.09.3.1 Flow-Accelerated Corrosion
Mass transfer of reactants to and from theelectrode surfaces plays an important role duringflow-accelerated corrosion. Typically, dissolvedoxygen or the dissolved metal ions have to dif-fuse from the solution to the metal or from themetal to the solution, respectively (Sedamedet al., 1998). Mass transport has been studiedby several authors in different hydrodynamicsystems that use convection to enhance the rateof mass transfer to the electrode. Such devicesinclude free and submerged jet impingementgeometries, rotating disk electrodes (RDEs),and rotating cylinder electrodes (RCEs).
6.09.3.1.1 Koutecky–Levich equation
The standard model used to describe flow cor-rosion current densities for mixed controlledreactions (where activation and diffusion pro-cesses are present) is the modified Koutecky–Levich model (Wood et al., 1990) given in eqn[28]. In this equation, km (the mass-transportcoefficient) can be derived from eqns [29]–[31].Equation [28] is the summation of activation cur-rent density, ia, which is controlled by the charge-transfer kinetics and the diffusion-controlledcurrent density, id, which is related to the

Erosion–Corrosion Mechanisms 413
mass-transport conditions of species and ions toand from the reacting surface:
1
icorr¼ 1
iaþ 1
id¼ 1
nFklþ k�1klnFkm
½28�
where icorr¼ corrosion current density,n¼ number of electrons, F ¼ Faraday’s con-stant, k1 ¼ forward reaction rate,k�1¼ backward reaction rate.
The values of km are normally obtained fromnondimensional correlations between theSherwood number Sh ¼ (kmL/D), the Schmidtnumber Sc¼ (�/D), and the Reynolds numberRe ¼ (UL/�):
Sh ¼ aRex Scy ½29�giving
km ¼ aD1�yLx�1�y�xUx ½30�
Taking typical values for the exponents asx¼ 0.6 and y¼ 0.33 (Poulson, 1999) gives
km ¼ aU0:6 D0:66
�0:27L0:4
� �½31�
where D ¼ diffusion coefficient, U ¼ flow velo-city, � ¼ kinematic viscosity, L ¼ characteristiclength, a¼ scaling constant.
Flow-enhanced corrosion rates induced bysolids-free flows, as suggested by eqn [28],have been shown to depend on km
n where nvaries depending on the surface/environmentcombinations and the controlling corrosionmechanism. For example, corrosion rates forcopper alloys in seawater under mixed activa-tion and diffusion control are shown to haven< 1. Steels in sulfuric acid and under simplemass-transfer control have n ¼ 1, whereas forsteels in water, where flow polarizes the cor-rosion potential and also influences theoxide’s solubility, n lies between 1 and 3 (seePoulson, 1999). Mass-transport processes alsoincrease with surface roughness creating largen values until an upper-bound value isreached given by
Sh ¼ 0:01Re Sc0:33 ½32�
However, a power-law relationship betweenerosion–corrosion rate and km is not alwaysseen as in the case of steel in nitrates wheresurface films are removed above a critical kmresulting in a sudden increase in erosion–corro-sion rate (Poulson, 1999).
6.09.3.2 Particle–Surface Interactions
When corrosion rate is partially or whollycontrolled by mass transfer of reactant to orproduct from the surface, local conditionsunder erosion may well influence the
mass-transfer kinetics (measured by the mass-transfer coefficient km). Under such conditions,the corrosion will be controlled by the masstransfer (typically diffusion processes) and thedriving concentration gradient (relative concen-trations of active species near surface comparedto free stream concentrations) (Silverman,2004). Both the mass transfer and concentra-tion gradient will be affected by solid-particleimpingement, which influence the local fluidflow field and increase surface roughness.Erosion will also increase the surface areawetted by the corrosive electrolyte and couldestablish microgalvanic cells on the surfacewith damaged areas being anodic to the passiveand (cathodic) unaffected areas. Erosion willalso increase the dislocation density in affectedsurface areas which can lead to potential differ-ences between eroded and less eroded areasbeing established and the formation of anodicand cathodic sites generating a microgalvaniceffect enhancing material loss from the surface.It is also likely that the corrosion kinetics will bealtered on eroded areas.
6.09.3.2.1 Depassivation and repassivationkinetics
As suggested already, depassivation of pas-sive or film surfaces is associated with flowvelocity. Figure 13 shows the trend for such apassive system as a function of flow velocityand its vulnerability to mechanical processeswhich accelerate corrosion loss rates due todepassivation.
(i) Depassivation
Depassivation in erosion–corrosion pro-cesses is assumed to be rapid and associatedwith the mechanical removal or stripping ofthe passive surface layers through particle, cavi-tation bubble, or liquid droplet impact.Figure 14 illustrates the level of damage to pas-sive films as a function of solid-particleimpingement angle. Mechanical removal and/or rupture of the passive layer enables chargetransfer to proceed at varying rates and parentmetal dissolution is likely. ‘Recovery’ or repas-sivation aspects of the passive film are thereforeimportant but are very system dependent.
Figure 15 shows the current response overtime for individual solid-particle impacts onthe naturally passivating system of stainlesssteel. Some impacts will only result in partialpassive layer removal or cracking which willinfluence repassivation kinetics and possiblythe composition of the regrown layer.

0
25
50
75
100
125
150
0 2 4 6 8 10 12 14
Velocity (m s–1)
Intactpassivefilmprovidesbarrier tochargetransfer
Depassivationand/ortransformationof film andincreasedmasstransport
Completedepassivationand ratelimited
Mechanicalenhancement(cavitation orsand erosion)
Critical velocity
Cor
rosi
on r
ate
Figure 13 Possible corrosion trends (with arbitrary units) for a passive metallic surface. From Wood, R. J. K.2004a. Erosion–corrosion interactions and their effects onmarine and offshore components. Keynote at EuroCorrConference, Nice, France and accepted for publication in the Special Issue on Tribocorrosion, Wear 2006.
Passive layer or film
Substrate (a)
(b)
(c)
(d)
Figure 14 Schematic showing that the level of passivelayer damage is dependent on particle impact angle.
6
5
4
t (ms)
l (μA
)
3
2
270 280 290 300 310
Figure 15 Current transients in erosion–corrosiondue to depassivation/repassivation. From Sasaki, K.and Burstein, G. T. 2000. Observation of a thresholdimpact energy required to cause passive film ruptureduring slurry erosion of stainless steel. Phil. Mag.Lett. 80(7), 489–493.
414 Erosion/Corrosion
(ii) Repassivation
Surface coverage models for passive filmgrowth/recovery relate to the number of molesof oxide formed Nu as a ratio of the total num-ber of surface sites available, No,u in units ofmol cm�2 (from Jemmely et al., 2000):
y ¼ Nu
No;u½33�
The rate of lateral surface coverage, assum-ing complete oxidation of the parent metal tooxide, can be given by
dydt¼ ia
Mox
LoxroxnF
� �½34�
where ia is the anodic current density, n is thecharge number, Lox is the oxide film thickness,ox is the oxide density, and Mox is the molecu-lar weight of the oxide.
If Tafel kinetics applies, then the anodic cur-rent density ia can be given by
ia ¼ kað1� yÞexp Eapplied
ba
� �½35�
where ka is the rate constant and ba is the Tafelslope (¼dE/dln(i)). This assumes that oxidationoccurs exclusively on bare parent metal.
Film growth models may explain the thicken-ing of these oxide layers but assume growthoccurs by high field conduction which isthought to apply over the longer term but notin the early stages of repassivation of nascentsurface sites:
i ¼ kB expB�fLox
� �½36�
where kB is the rate constant and the migrationkinetic constant for a single ionic speciesB ¼ �zFaj/RT. Here �1 is a symmetry constant,

Erosion–Corrosion Mechanisms 415
z is the charge on the migrating ionic species,and aj is the jump distance. The term D is thepotential difference across the oxide layer andtaken to be the difference between the electrodepotential and the minimum potential for initia-tion of film growth. The other term in theequation is the oxide layer thickness, Lox.
This can be linked to the current–time tran-sients by setting
Lox ¼Moxq
nFrox½37�
where q is the charge passed orRi dt.
The use of such models to predict wall lossrates depends on the above assumptions andknowing the oxidation process and the asso-ciated charge number as well as the area ofdepassivation due to the erosion processes.
Figure 16 is an attempt to map surfaceresponses to the whole range of erosion andcorrosion mechanisms from erosion-dominatedthrough erosion–corrosion, corrosion–erosionzones to corrosion-dominated mechanisms. Toidentify what zone a particular application maybe operating under is difficult without somedata on erosion and corrosion performance ofthe surface in question. To plot such a map,three independent tests to determine pure ero-sion E, pure corrosion C, and combinederosion–corrosion gravimetric levels T arerequired. However, Table 4 shows the possiblesand-particle energy of various applicationsthat are directly related to the likely mechanicalerosion damage rates E. This will define a posi-tion on the T–C axis of Figure 16 and the rate ofdepassivation as this is likely to be linked to Ek.
0.1
1
10
100
0.1 1 10 100Mechanical erosion T–C (mg)
Ele
ctro
chem
ical
cor
rosi
on C
(m
g)
Electrochemically controlled zone
Mechanically controlled zone
Corrosion–erosion zone
Erosion–corrosionzone
(T–C/C) = 10
(T–C/C) = 1
(T–C/C) = 0.1
Steel 1020
HVOF NAB
Cast NAB
Figure 16 Mapping electrochemical material lossagainst mechanical erosion rates for anonpassivating surface CS (AISI 1020) along withtwo potentally passivating surfaces of NAB, onethat has been thermally sprayed by HVOFdeposition as a coating on CS and the other whichhas been cast. The results have been obtained by jetimpingement erosion–corrosion tests.
Surface repassivation, on the other hand, ismaterial–electrolyte–flow-field specific, andthis dictates the corrosion rate C. Three systemsare plotted on this mechanical erosion versuscorrosion map. Two are passivating systemsbased on cast and coated nickel aluminumbronze (NAB) surfaces in saline solution andhave a positive slope (increases with increasingmechanical erosion effects). This increase isrelated to repassivation kinetics being unableto repassivate the eroded surface under increas-ing erosion. The third is CS in saline solutionwhich is not passivating and has a slope near tozero or slightly negative. Here, the corrosionproducts formed on the surface are nonadher-ent and easily removed and the trend isdominated by erosion rate while the corrosionrate remains relatively constant. These resultswere obtained using a free jet impingementerosion–corrosion rig (Figure 19).
6.09.3.3 Synergy
Synergism is the enhancement of materialloss encountered when both erosion and corro-sion processes work together. This synergyoften leads to significant increase in materialloss rates over and above those expected byadding the separate erosion and corrosionrates together. Synergy is defined as ‘the differ-ence between erosion–corrosion and thesummation of its two parts’.
6.09.3.3.1 Models and mapping
Ferng et al. (1999, 2000) modeled erosion–corrosion in pipe flow by adding the erosionand corrosion contributions together. Theyassumed erosion–corrosion of piping is a degra-dation mechanism that is a coupledphenomenon between chemical corrosion andmechanical erosion, which is dominated by pip-ing layout, fitting geometry, and local flowstructure. They used local flow models, includ-ing the multidimensional, two-phase fluidmodels to simulate flow characteristics withinpiping. Erosion–corrosion models were used topredict two-dimensional distributions oferosion–corrosion locations in steel pipework.The model showed satisfactory agreementwith distributions of wear sites measured inpractice.
The erosion model was based on dropletimpingement but used an oxide removal basedon eqn [38]:
m ¼ CsNFyðyÞrfU
2f
Hv½38�
where Cs is a system constant, N the frequencyof impingement, F� a characteristic function, �

Table 4 Potential particle kinetic energies and flow velocities for marine components
Marine component
Pipe Valve Pump Propulsor
Velocity (m s�1) 0–3 5 10 25Particle diameter (mm) 100 100 100 100Particle kinetic energy (mJ) 0–0.007 0.02 0.07 0.44
416 Erosion/Corrosion
the impact angle, f the fluid density, Uf thenormal velocity, andHv the pipe wall hardness.
The corrosion model was based on a mixedcontrol corrosion process of dissolution ofmagnetite and the mass transfer of ferrousions Fe2þ giving
i ¼ Ceq � C11=2kað Þ þ 1=kmð Þ ½39�
where ka is the reaction rate constant, Ceq is thesoluble ferrous ion concentration at equili-brium with magnetite, C1 is the solubleferrous ion concentration in the bulk solution,km is the mass-transfer coefficient.
Erosion damage by solid-particle impact orcavitation bubble collapse to an oxide or pas-sive film will reveal the underlying nascentsurface. This induces a higher activity (highercorrosion current), for a limited duration, thanfor the intact oxide surface. Bozzini et al. (2003)employed a simple approximate model using a‘recovering target’ concept. This erosion–corro-sion model has the advantage in that it can beapplied to both passivating and actively corrod-ing conditions. The impacting particles aremodeled with rigid monodisperse spheres ofradius rp. The particle impact process isassumed to be Poissonian with parameter l(impacts m�2 s�1). It is assumed that eachimpact gives rise to an alteration of the corro-sion rate through a localized change incorrosion current density for a period of time,relating to a recovery to the unaffected state.The effective corrosion current density, icorr(nA cm�2), at a given electrode potential (typi-cally the corrosion potential) can be related tothe mechanically affected corrosion componentof the synergistic damage through a coefficient,fa, (such that 0 � fa� 1). The fraction of thecorroding surface which is affected by the ero-sive action of impinging particles is given byeqn [40]:
icorr ¼ faia þ ð1� faÞiu ½40�
where the subscripts ‘a’ and ‘u’ stand for‘affected’ and ‘unaffected’, respectively. Thecurrent densities ia and iu are characteristic for
the corroding material in the absence and in thepresence of the erosive action and can be mea-sured separately by means of suitableexperiments. In general, the coefficient fa canbe defined in eqn [41]:
fa ¼no: of impacts
control area
� �� damaged area
impact
� �� recovery time
¼ lAa� ½41�
whereAa is the affected surface area and � is thepassive recovery time.
Equation [40] indicates an accelerating ele-ment to corrosion caused by film damage orremoval and is one element of the complexinteractions between erosion and corrosionthat needs to be understood.
These interactions can be defined as follows.The total damage under erosion–corrosion, T,can be represented as
T ¼ E þ C þ S ½42a�
where E is the pure erosion material loss, C isthe solids-free flow corrosion rate (possiblyderived from the corrosion current density i ineqn [40]). The synergistic effect (interactiveterm), S, is referred to as DEc or (DCeþ DEc),depending on the literature source, where DEc isthe enhanced erosion loss due to corrosion andDCe is the enhanced corrosion due to erosion.The term DCe can be partially expressed by eqn[40] but additional terms are required relatingto the effect of the erodent deforming the sur-face leading to increased corrosion activity. TheS terms and how they should be measured aregiven by the ASTM G119-93 standard which isa useful guide to evaluate synergy (ASTMG119-93, 1993). It is also important to notethat the synergistic term S can be positive ornegative. Bozzini et al. (2003) shows thatannealed CS has a more active corrosion poten-tial before it is work-hardened, resulting iniu > ia, and by using eqn [40] shows a reduction(i.e., a negative synergy) in overall corrosionrate with erosion present.
Recent literature in the erosion–corrosionarea has defined synergy in different ways andthus a cautious note is raised here that care betaken to determine the definition used when

Erosion–Corrosion Mechanisms 417
comparing synergistic levels from differentsources in the literature. For example, DEc insome cases is defined as the synergy term andDCe as the additive term. Equations [42b]–[42d]all relate to erosion–corrosion but generate dif-ferent synergy values:
T ¼ E þ C þ�Ec þ�Ce ½42b�T ¼ E þ C9þ�Ec þ�Ce9 ½42c�
T ¼ E þ C0þ�Ec ½42d�
where C9 is the static corrosion rate, C is thesolids-free flow corrosion rate, C0 is the corro-sion rate under erosion–corrosion conditions,DCe is the enhancement of C due to the pre-sence of erosion, DC9e is the enhancement of C9due to the presence of flow and erosion, andDEc is still the effect of corrosion on erosion.The synergistic effect, S, is therefore referred toas DEc or (DCeþ DEc) or (C0þ DEc), depend-ing on the literature source, and thus readersmust take care in extracting synergistic levelsfor different materials when using multiplesources of literature.
Neville et al. (2002) have shown that thecorrosion current density increases withincreasing solid loading (200, 400, and600 mg l�1) for UNS S31603 under an imping-ing jet of 3.5% NaCl at 17 m s�1. It has alsobeen shown that synergistic effects, which resultin the damage due to separate corrosion anderosion processes, are normally greater than thesum of the individual damage processes and canaccelerate material removal significantly (i.e.,T ¼ 50� (C þ E); see Wood and Hutton,1990). Synergistic effects have also been shownto be a function of impinging solid-particleenergy for various stainless steels (UNS
0.000 01
0.000 1
0.001
0.01
0.1
1
10
1.E–09 1.E–08 1.E–07
Sand part
Ero
sion
rat
e V
u (
μm3 /
impa
ct)
Vu ∝ U
4
Figure 17 Erosion and erosion–corrosion wear rates ofsand energy (Wood, 2004). This material has been recorrosion’ by R. J. K. Woods pp. 113–132 of the SecMachinery ISBN 1 86058 441 1 published by Professionthe Council of the Institution of Mechanical Engineers.
S31603, UNS S32100, UNS S32250, and UNSS32760; Wood, 2004a). Such results indicatethat synergy is more pronounced at lower par-ticles energies. For example, under an erosionenergy of 0.02 mJ per impact, the volume lossunder erosion–corrosion for UNS S32250(Ferralium 255) is 10 times that for only erosion(see Figure 17). However, at higher energiesaround 7.5 mJ, the erosion–corrosion rate isonly 1.4 times that for only erosion. It is alsoclear that the erosion rate is not simply relatedto solid-particle impingement energy but hastwo regimes dependent on the magnitude ofthe energy: for the lower energy range, Vu _
U4, and for the higher energy range, Vu _ U2.There is also potentially conflicting data
reported in the literature with certain erosion–corrosion test conditions producing negativesynergy whereas others producing a positivesynergy. Wood (1992) reports negative syner-gies for a superduplex steel UNS S32750 in3.5% NaCl solutions at Ek¼ 0.05 mJ and 90�
impingement angle. However, Neville and Huobserved a positive synergy on two superaus-tentic stainless steels (UNS S31254 and UNSS32654) and a superduplex steel UNS S32750but these tests were conducted at a higher Ek of4 mJ (Neville and Hu, 2001). This suggests acomplex relationship with synergy as a functionof Ek as this affects the crater size, crater shape,levels of strain rate, and passive film or oxidelayer recovery time. Table 5 is an attempt to listthe mechanisms that may influence the sign ofthe interactive mechanisms, namely, the DCe
and DEc components.Another process that could influence the sign
of synergistic interactions and levels of synergyis that of near-surface hardness changes
1.E–06 1.E–05 1.E–04
icle energy Ek (J)
Vu ∝
U
2
UNSS32250 + tap water
UNSS32250 + 3%NaCl
UNSS32760 + tap water
UNSS32760 + 3%NaCl
UNSS31603 + 3%NaCl
UNSS32100 + 3%NaCl
duplex and austenitic stainless steels as a function ofproduced from ‘Challenges of living with erosion–ond Symposium on Advanced Materials for Fluidal Engineering Publishing. Permission is granted by

Table 5 ‘Synergy’ overview of processes that could lead to positive and negative interactive effects betweenmechanical and electrochemical processes present under erosion–corrosion conditions
Mechanism factor Positive interaction Negative interaction
Critical impactenergy
Above-critical impact energy to penetrate/damage passive/product film/coverage.Results in increased charge transfer atthe liquid/metal interface
Below-critical impact energy. Results inreduced charge transfer at the liquid/metal interface as film could beinfluenced in composition by impact
Surface roughness,Ra
Roughening effects on mass-transfercoefficients unknown but km is likely toincrease with increasing Ra. (TheSilverman review ( Silverman, 2004)suggests mass-transfer sensitivities withReynolds number are affected bysurface roughness as km _ Re0.9 withsolids compared to km _ Re0.65 solidsfree flows for rotating cylinder workdue to roughening effects on thesurface. Roughness may promotemicroturbulence affecting the localdouble layer. Roughness could alsopromote local microelectrode behavior(potential field distortion) at the tips ofimpact craters
Roughness influences the contactmechanics of angular solid-particleimpingement. Increased roughnesscould reduce contact stresses andthereby the near- and far-field stressdistributions
Plasticdeformation/strain
Plastically deformed and stressed surfacesenhance corrosion processes. Corrosioncauses premature detachment ofplastically deformed or strain-hardenedimpact carter lips
Strain-hardened surface increaseshardness and reduces erosion rate andcould reduce corrosion due to change inmicrostructure/grain lattice distortion
Increased orunsteadyhydrodynamicsor turbulence
Unstable double layers (nonsteady state)and unsteady driving concentrationgradients of active species
High concentrations of solid particlescould block the surface from incomingparticles. Particle–particle interactionalters impact conditions
Contacttemperature
Local surface (flash) temperatures couldbe significantly higher around andwithin impact craters which couldaccelerate corrosion rates
Local surface (flash) temperatures couldinfluence oxide film composition andmicrostructure and thus could be moreerosion resistant
Localized corrosion Pitting and microgalvanic corrosion cellsdue to localized defects in the passivelayers induced by erosion or exposure ofinclusions or voids. Crack systems wouldalso be vulnerable to crevice corrosionattack and accelerate crack propagation.Microgalvanic corrosion cells could beformed between erosion craters andsurrounding unaffected areas
Multiphase surfaces Corrosion of interface – potential to losebond integrity between hard and binderphases, binder receding due to corrosion– leaves hard phase loose to be removedby mechanical action. These interactionscould also apply to splat boundarieswhich exist after spraying
Substrate corrosion products can eject viainterconnecting pores onto the coatingsurface, reducing erosivity
Passive film state Depassivation: removal of air-borneoxides or oxide layers produced bypassivation. Oxide layer could increasefriction between impacting solid particleand the bulk substrate material
Repassivation: overall recovery times andadherent oxide layers formed bypassivation. Oxide layer could decreasefriction between impacting solid particleand the bulk substrate material.Alternatively, denser oxide could beformed that reduce corrosion or erosionor both
Partly taken from reviews by Wood, R. J. K. 2004a. Erosion–corrosion interactions and their effects on marine and offshore
components. Keynote at EuroCorr Conference, Nice, France and accepted for publication in the Special Issue on
Tribocorrosion, Wear 2006 and Wang, H. W. and Stack, M. M. 2000. The erosive wear of mild steel and stainless steels
under controlled corrosion in alkaline slurries containing alumina particles. J. Mater. Sci. 35, 5263–5273.
418 Erosion/Corrosion

Erosion–Corrosion Testing 419
induced by erosion strain hardening or corro-sion softening. For example, the hardness of ametallic electrode will decrease when anodicdissolution is present on the surface and therelative hardness degradation, DH/H, can becorrelated approximately to the anodic currentdensity present at the electrode surface, ia, asfollows:
�H
H¼ �B log
ia
ith
� ½43�
where DH¼H*�H and is the change of hard-ness due to anodic dissolution at the surface, Hand H* the hardness without and with anodiccurrent present at the electrode surface, respec-tively, B (>0) is an experimental constant, andith is the threshold anodic current density toinduce the synergistic electrochemical–mechan-ical effect, that is, when ia� ith, DH¼ 0.
The change in surface hardness induced byerosion or corrosion can also establish micro-galvanic cells due to work function differencesbetween erosion-hardened areas or corrosion-softened areas and unaffected areas (Guo et al.,2005). This is an additional microgalvanic pro-cess to that of surface film removal.
(i) Empirical models
Wood and Hutton (1990), summarizingexperimental data published on erosion wearover a wide range of solid particle and cavita-tion erosion, found that the data fell within twogroups, the medium- and high-synergisticsystems. The erosion–corrosion enhancement,S, was found to be closely linked to the pureerosion component E. Two expressions werederived by plotting S/C against E/C ratios toobtain the following expressions.
For the medium-synergy group:
S
C¼ exp 1:277 ln
E
C
� �� 1:9125
� ¼ 0:1477
E
C
� �1:277
½44�For the high-synergy group:
S
C¼ exp 0:755 ln
E
C
� �þ 1:222
� ¼ 3:3940
E
C
� �0:755
½45�By using the two expressions above and
experimental values of erosion and corrosion,these can be compared to experimental deter-mined erosion–corrosion values. This willindicate the level of synergy occurring in thesystem under test. The equations can also beused to predict synergistic levels should pureerosion and corrosion rates be known.
(ii) Mapping
(Stack and Pungiwiwat (2002) and Stacket al. (1995, 2003) have used erosion and corro-sion models with coupling to potential versuspH (Pourbaix) diagrams and mechanisms asso-ciated with synergy levels to predict theperformance of various systems using maps.The maps typically plot particle or slurry velo-city against potential and show regime regionsand have been presented for several material/electrolyte systems with electrolytes of variouspH’s. Work is underway to develop erosion–corrosion rate maps based on experimentaldata and existing mapping approaches.
6.09.4 EROSION–CORROSION TESTING
6.09.4.1 Gravimetric and Coupon Techniques
The manner by which material wastage ismeasured in erosion–corrosion is an importantconsideration. Experience shows that the use ofweight loss of a tested specimen or coupon isnot a sufficiently accurate way to representmaterial wastage. When surfaces are submittedto both chemically aggressive fluid flows andsolid-particle impingement, several differentweight changes occur, over and aboveerosion–corrosion losses. The surfaces of thespecimen, other than the eroded area, can addor subtract weight from chemical reactions suchas oxidation. Weight can also be added whenerodent particles become embedded into thesurface or become mixed within the surfaceoxide layers or scales. The preferred way tomeasure erosion–corrosion of gas-particle-laden flows is by direct depth measurementusing a scribed grid placed onto the groundsurface to be eroded. The grid area thicknessis measured at the grid intersections using amicrometer before testing. Post testing, the spe-cimen is cross-sectioned and measured using amicroscope micrometer, relating the thicknessat the location of the deepest penetration to thepretest grid thickness at the same position. Thisprocess is reproducible to 1 mm (Levy, 1995).
Szyprowski (2003) reviews H2S corrosion andthe methods used to determine the efficiency ofinhibitor performance, employed to suppresssuch oilfield flow corrosion. Gravimetric techni-ques based on coupons in pipe flow prepared toASTM G4-95 (1995) are reviewed. Gravimetrictechniques should include the rate of deposit for-mation on the coupons, the corrosion rate, thedepth and rate of formation of corrosion pits, thepresence of hydrogen blowholes, the changes inmechanical properties of the specimens (the effectof hydrogen cracking), and investigations onmetal microstructure to find intercrystalline

420 Erosion/Corrosion
corrosion. It is also recommended to use electro-chemical methods that provide informationabout the mechanism of inhibition, time ofadsorption, type of adsorption, and so on.Corrosimetric (resistance) polarization probemethods for use in refineries are also reviewed.DeBruyn (Johnston et al., 1996) has reviewed themodern methods of monitoring corrosion in pet-rochemical industries, including electrochemicalnoise methods.
Mass loss can be assessed using Faraday’s lawsof electrolysis (eqn [46]), where q is the charge,F is Faraday’s constant (96 485 C mol�1), z is thenumber of electrons involved in the reaction, andDw is the mass loss (Barik et al., 2004). Forexample, for a NAB composition, the calculatedequivalent oxidation state of the cations pro-duced by dissolution is 2.09 and the equivalentmolar mass (Mm) is 59.5 g mol�1:
q ¼ zF�w
Mm½46�
6.09.4.2 Rotating Systems
A variety of geometries are used with varyingvelocity/flow-regime capabilities. Figure 18 illus-trates some commonly used geometries to studythe flow effects on electrodes of redox reactions.The working electrode (under polarization
Insulatingpolymersheath
(a)
(c)
(b)
(d)
NABelectrode
NABelectrode
NABelectrode
NABelectrode
Other metal(Cu–Ni or Cu) Jet nozzle
Figure 18 Types of hydrodynamic workingelectrodes. Rotating disc electrode (RDE); rotatingcylinder electrode (RCE); bimetallic rotating cylinderelectrode (BRCE); wall-jet disc electrode (WJDE).From Wharton, J. A., Barik, R. C., Kear, G.,Wood, R. J. K., Stokes, K. R., and Walsh, F. C.2005. The corrosion of nickel–aluminium bronze inseawater. A Century of Tafel’s Equation: ACommemorative Issue of Corrosion Science 47(12),3336–3367.
control) here is illustrated by the NAB electrode.In Figure 18c, the performance of NAB and theother metal cylindrical electrodes can be exam-ined. They are used to study corrosion undercontrolled hydrodynamic conditions and aretypically designed to simulate pipe flow regimesand fluid structures. The first three are, however,unsuitable for solid-particle erosion–corrosionstudies as the solid-particle impingement condi-tions are difficult to quantify and reproduce. Thewall-jet geometry may lend itself to single-parti-cle studies of erosion–corrosion, as solutionresistance in such cells inhibits measurement oflarge currents induced by slurry erosion–corro-sion studies. Slurry erosion–corrosion istherefore studied using a larger-scale free jet orsubmerged-jet impingement rig.
Tests carried out using a slurry-jet impinge-ment rig are typically in kinetic energies rangingfrom 0.02 to 0.40 mJ. However, larger facilitieswith both free and submerged jets have beencommissioned that operate up to energies of1 mJ using recirculated slurries. Modificationsto jet impingement rigs can be made to accom-modate a silver/silver chloride (Ag/AgCl)reference electrode (RE) and a platinum coun-ter electrode (CE) (see Figure 19). This designhas a ‘once-through’ principle for the sand, andthe ejector assembly, used for sand-particleintake, is located downstream to prevent ero-sion damage on the counter and referenceelectrodes. A valve situated near the ejectorallows the sand intake to be completely isolatedunder flow corrosion conditions. Typically,flow corrosion tests use an electrolyte of a3.5% NaCl solution, while slurry tests use a3.5% NaCl solution with a 3% w/w silica sandconcentration. Pure corrosion (C) experimentswere carried out in the absence of slurry,whereas the erosion–corrosion (T) experiments
Computer and data logging
Electrolyte
Sand suction
Specimenholder
Ag /AgCl RE
Jet diameter 5.5 mm
Specimen
Pt CE
Figure 19 Erosion–corrosion rig for low-kinetic-energy-free jet impingements instrumented to makeelectrochemical measurements. Exposed specimenarea typically 7 cm2. From Tan, K. S., Wharton J. A.,and Wood, R. J. K. 2005. Solid particle erosion–corrosion behaviour of a novel HVOF nickelaluminium bronze coating for marineapplications – correlation between mass loss andelectrochemical measurements. Wear 258, 629–640.

Erosion–Corrosion Detection 421
were carried out with sand. A potentiostat isused to monitor the sample potential. For pureerosion (E), a �200 mV cathodic protectionpotential was applied, based on the potentialsobserved from erosion–corrosion conditions.
6.09.4.3 Flow Systems
Flow systems are typically based on pipeloop systems with working sections equippedfor electrochemical measurements. Straightpipe sections aim to reproduce service condi-tions and can generate a variety of flowconditions from fully developed laminar to tur-bulent or can be used to study pipe entryconditions where the flow is not fully developed(see Figure 20). Flow loops clearly require asso-ciated pipework, filters, and pumps, all ofwhich have to be selected to be inert to theexperiment. Hence, typically nonmetallicuPVC pipe fittings and components are used.A typical loop layout is shown in Figure 21.
Figure 20 Flow development for laminar andturbulent flow regimes. From Wharton, J. A. andWood, R. J. K. 2004. Influence of flow conditionson the corrosion of AISI 304L stainless steel. Wear256, 526–536.
Fluidreservoir
Headertank
Bypassloop
Flowmeter
Filter
Test section
60 pipe diameters
Fluidreservoir
P
P
Figure 21 Recirculating low loop schematic. Thefluid volume of the flow loop was ,180 l. FromWharton, J. A. and Wood, R. J. K. 2004. Influenceof flow conditions on the corrosion of AISI 304Lstainless steel. Wear 256, 526–536.
6.09.5 EROSION–CORROSIONDETECTION
6.09.5.1 Advanced ElectrochemicalMonitoring
6.09.5.1.1 Electrochemical noise
As stated before, Sasaki and Burstein (2000)observed current transients for single-particleimpacts on passive stainless steels, and illu-strated that monitoring such transients canprovide direct information on the erosion–corrosion processes. Therefore, techniques todetect the noise level (small perturbations) onelectrochemical corrosion measurements arebeing developed. This is called electrochemicalnoise analysis or ENA. Noise can be measuredon both current (electrochemical current noise,ECN) and potential (electrochemical potentialnoise, EPN) outputs and subsequent analysiscan yield corrosion resistance details, assumingbothmeasurements are in phase with each other.EPN measurements can be made with two elec-trode cells while current noise typically requiresthree electrodes. Further details of this techniquecan be found in Cottis and Turgoose (in press).Such measurements can be made under flowcorrosion and erosion–corrosion and are nowbeing analyzed by researchers for insight intosynergistic processes and surface performanceindicators. Figure 22 shows a corrosion flowcell designed for ENA and Figure 23 shows typi-cal EPN and ECNoutputs for stainless steel pipesection electrodes seen in Figure 22 subjected to aflowing NaCl solution at Re¼ 2000. The
Workingelectrodes
ZRAECN
EPN
Reference electrode
28 m
m
Data logging
Flow
Spacer
Assembly clamping rods
Figure 22 Schematic of electrochemical flow celland measurement setup. From Wharton, J. A. andWood, R. J. K. 2004. Influence of flow conditions onthe corrosion of AISI 304L stainless steel. Wear 256,526–536.

422 Erosion/Corrosion
features seen relate to metastable and stable pit-ting activity on the wetted surfaces of thestainless steel electrodes.
A simple way to analyze noise data is totake the standard deviation of the currenttraces under flow corrosion, �c, and undererosion–corrosion, �T. Attempts are currentlybeing made to link the standard deviationratios of the ECN measurements to synergyto gain a further understanding of the effectsof erosion-enhanced corrosion, DCE.Although individual events are not likely tobe resolved, the result of multiple impacts asa function of time may be fruitful(ZRA ¼ zero-resistant ammeter).
However, caution should be applied to anyelectrochemical measurement under erosion–corrosion conditions. Other issues make elec-trochemical analysis and its comparison tosynergy difficult. These include the possibilityof local film currents between anodes/cathodes(Oltra et al., 1995), which will not be seen byECN measurements, and the effects of
–0.09
–0.06
–0.03
0
0.03
2
0
–2
–45 5.5 6
Time (h)
Cur
rent
(μA
)
Re 2000
Pot
entia
l (V
)
6.5 7
Figure 23 Electrochemical current and potentialnoise for AISI 304L in 3.5 wt.% NaCl solution at atransition Reynolds number of 2000. FromWharton, J. A. and Wood, R. J. K. 2004. Influenceof flow conditions on the corrosion of AISI 304Lstainless steel. Wear 256, 526–536.
Table 6 Possible influences on the de
Environmental Factor Depassivation
Solid-particle impact Removes passive filmSurface/liquidinterface
High velocities/wall shearstresses
Occluded geometries/pits
Local environment changessuch as low pH
Temperature Local temperatureTurbulence bulk flowstructure
Turbulent flow features
Wood, R. J. K. 2004. Challenges of living with erosion–corros
for Fluid Machinery, IMechE Conference Transations (1), pap
Engineering Publishing, Bury St Edmunds.
charging/recharging double-layer currents dueto fluctuating local events.
Table 6 lists the possible influences on thedepassivation and repassivation kinetics andthus the sources of electrochemical noise.
6.09.6 EROSION–CORROSION-RESISTANT MATERIAL ANDSURFACE SELECTION
Material selection for erosion–corrosionduty tends to be based on the systems of alumi-num, copper, zinc, and nickel due to theirrelative cheapness. More relatively expensiveoptions are stainless steels or polymers (whereapplicable), Co-based alloys (e.g., Stellite), Ni-based alloys (e.g., Inconel), hardmetals or cer-mets (e.g., sintered WC), ceramics and coatingsof these systems unto substrates of CS or low-corrosion-resistant alloys (Neville et al., 2002;Wood and Speyer, 2004; Puget et al., 1999;Scrivani et al., 2001; Levin et al., 1995; Geeet al., 2005; Gant et al., 2004a, 2004b). Surfacedegradation control techniques other than sur-face selection may well include the use ofinhibitors as well as controlling fluid tempera-ture, pH, and dissolved oxygen levels. Forexample, Poulson (1999) suggests a high pH(>9), and dissolved oxygen levels as low as10 ppb have been successfully used to controlflow-induced (solids-free) flow corrosion of CS.Process parameters should also be reviewed tominimize erosion and the use of sand-removal(screens and cyclone separators) techniques andsand-monitoring systems (acoustic) should bedeployed, where practicable, to reduce the poten-tial for erosion–corrosion (Madge et al., 2004;Mylvaganam, 2003; Al-Shamma’a et al., 2003).
An overview of material selection for ero-sion–corrosion was presented by the author atthe 2nd International Symposium on AdvancedMaterials for Fluid Machinery at the IMechEin February 2004 (Wood, 2004).
passivation and repassivation kinetics
Repassivation
Activates repassivationFilm growth kinetics (monolayer coverage pluslateral film growth)
Metastable pits
Local temperatureRougher/larger surface area
ion. Second International Symposium on Advanced Materials
er S965/008/2004, 113–132, ISBN 1 86058 441 1. Professional

Conclusions 423
Recent research into the erosion–corrosionof polymer coatings and HVOF aluminumand NAB coatings are reviewed in Moore andWood (1992) and Tan et al. (2005). This sug-gests that medium-density polyethylene(MDPE) surfaces should be considered, whereappropriate, as erosion–corrosion surfaces.
Figure 24 shows the erosion–corrosion rates(T) of the cast NAB, 90/10 Cu/Ni, HVOFNAB, plasma electrolytic oxidation (PEO) alu-mina coatings, MDPE, and the 4360 steelsubstrate plotted against particle energy, Ek.
For comparison, data for MDPE pipe mate-rial, taken from (Moore and Wood, 1992), arealso plotted on Figure 24. These results show thatMDPE outperforms all the other surfaces testedand is an attractive option for resisting slurryerosion in corrosive media where fluid tempera-tures permit selection. However, it has a highsensitivity to impact energy with an energy expo-nent over 1.5 (i.e., Vu � U3) (see Table 7).
For low-energy solid-particle flows, materialsselection could be based on the degree of passivitya surface offers under the design environmentalconditions it will be subjected to. For example,alloys that strongly passivate with very adherentfilms, such as titanium and some Ni/Cr/Moalloys, could be considered for some erosion–corrosion duties. Alloys such as steels and somecopper-based alloys that form protective or
0.000 1
0.001
0.01
0.1
1
10
0.01 0.1 1
E k (μJ)
Vu
(μm
3 /impa
ct)
Vu aluminaVu PEOVu steelVu HVOF NABVu NABVu 90–10 Cu–NiVu MDPE
Figure 24 Relationship between erosion–corrosionrate Vu and kinetic energy Ek under sand and 3.5%NaCl solution slurry jet impingement at roomtemperature and 90� free jet impingement angle.
Table 7 Erosion rate Vu dependencies on impact enertested under slurry jet erosion–corrosion condit
Material/coating
Carbon steel AISI 1020 Vu
Cast NAB Vu
HVOF NAB coating on steel Vu
PEO alumina coating on aluminum Vu
MDPE Vu
90/10 Cu/Ni Vu
Pipe-grade alumina Vu
semiprotective films that are easily removed byflow or particle impingement may be selected forvery low-particle-energy flows but will be proneto severe material wastage as the particle energiesand/or flow velocities are increased. However, itis not only the dynamic service conditions thatshould also be used for material selection.Shutdown periods can allow solids to sedimentout of suspension, and accumulation of these onsurfaces such as some stainless steels and nickel-based alloys can promote localized corrosionsuch as pitting or crevice corrosion.
6.09.7 CONCLUSIONS
As demonstrated within this chapter, mate-rial performance is highly system dependentand modest changes in environmental condi-tions can have a significant impact on wallwastage rates. The discussion throughout thischapter also confirms that our level of under-standing of the mechanism involved andcontrolling parameters is too low to enableinformed material or coating selection forsuch aggressive duties. Therefore, selectionmust be accompanied by either relevant experi-ence of good material performance undersimilar erosion–corrosion conditions or rele-vant experimental results from carefullyconstructed laboratory testing that has provedto simulate field conditions to allow materialand coating screening. For a review of flow-assisted corrosion, the reader is also referredto a recent National Association of CorrosionEngineers (NACE) book by Roberge (2004)and a review chapter by Craig (1991).
This chapter has detailed the fundamentalaspects currently known to be of importanceto erosion–corrosion. The level of understand-ing is incomplete and some of the complexitiesof erosion–corrosion processes have been high-lighted; there is a need for serious researcheffort to gain full understanding. Therefore,the overall conclusion, at present, is that it isdifficult to give generic statements of how ero-sion–corrosion impacts upon structural
gy and correlation coefficients for the various surfacesions at 90� impact angle, as shown in Figure 24
Power law Correlation coefficient R2
¼ 4.06Ek0.87 0.93
¼ 1.06Ek0.93 0.97
¼ 4.11Ek1.18 0.99
¼ 2.66Ek1.44 NA
¼ 0.59Ek1.52 0.99
¼ 1.48Ek1.12 0.99
¼ 0.157Ek1.91 NA

424 Erosion/Corrosion
integrity. Erosion–corrosion is extremely sys-tem-process sensitive and can result in havingno influence at all on the component life, butmore often it can be the prime cause of prema-ture component failure, loss of containment, orsystem functionality. There are no erosion–cor-rosion models available, although some basiccorrosion enhancement models have beenembedded into commercial CFD particle-track-ing codes to predict pipe wall wastage rates.Such models are also system specific and needto be calibrated (experimentally) before resultsare used by designers.
A good example of the above is seen in pre-dicting the structural integrity associated withpipe systems handling corrosive fluids and cor-rosive slurries. Most available data from theliterature are specific to the test rig geometryused. This results in a deficiency of data toallow accurate life prediction of specific pipesystems operating under specific process condi-tions. Thus, at present, the designers andoperators of specific systems cannot avoiddoing experimental tests on pipe loop systemsto gain accurate wear rates. This is primarily dueto the number of parameters to consider and thecomplexity of the wear mechanisms and the lackof comprehensive computational tools to esti-mate wear. Knowledge from the literature canbe used to design experiments to simulate pro-cess damage; however, scaling up wear rates tofull scale is problematic. Therefore, full-scaletests are recommended where possible.
Computational evaluation of wear withoutexperimental calibration is not recommended.Experimentally validated subscale wear predic-tions increase the confidence of full-scale wearrate estimation but are not currently robust.Such sentiments are echoed by recent reportsfor projects trying to assess the erosion–corro-sion levels of pipe systems that are beingdesigned for handling and processing radioac-tive slurries of nuclear waste (Duignan and Lee,2002; Wood and Wharton, 2002).
Online techniques applicable for structuralintegrity monitoring of components exposed toerosion–corrosion, such as the use of test cou-pons or electrochemical analysis, are growing inpopularity but are far from robust and standa-lone. Considerable expertise is required toanalyze the results or output signatures andsome debate surrounds the interpretation ofelectrochemical responses. Offshore oil and gasprocess streams often use acoustic sand detectorsto alert operators to potential erosion–corrosionissues. These sensors can also evaluate the colli-sion energy (erosion effectiveness of the solidparticles known to be in the flow). But confi-dence in such techniques has been underminedby multiple false alarms and unexpected loss of
contaminant due to sand production that wasnot detected by such sensors.
The selection of new materials and coatingsfor erosion–corrosion control is also hamperedby incomplete wear rate data and again the testconditions and geometry used to generate suchtest data will probably not match those of theapplication. Where data do match the materialcomposition under consideration, care shouldbe taken that the manufacturing and processingroutes are also identical (i.e., heat treatments,cast or forged, descaled or not). Performancemapping of surfaces over a wide range of ero-sion–corrosion conditions is also helpful andcan be used to guide selection of materials andprocess conditions to increase component life.The effects of erosion–corrosion can be miti-gated if hard and nonconducting surfaces canbe used. Ceramic and polymer surfaces, forexample, could be used if compatible with theprocesses involved. Chemical treatments withcorrosion inhibitors, which coat wetted sur-faces, can be used for low-energy flow systemsbut they are not optimized for inhibiting ero-sion–corrosion. They can be readily strippedfrom the surface when solid impact occurs.
However, certain points for guidance can bemade to reduce or minimize erosion–corrosionand increase structural integrity:
1. The galvanic compatibility of coupled dis-similar materials should be checked for liquidhandling systems.
2. The compatibility of component materialswith the process environment for both operat-ing and nonoperational conditions should bechecked.
3. For solid-handling systems (i.e., slurrysystems), the trajectory, energy, and concentra-tion of solid particles must be considered foraccurate predictions of wear rates andlocations.
4. Wherever possible, component materialsshould be tested using full-scale experimentalfacilities that accurately simulate the serviceconditions of the system under consideration.
5. Quantification of the synergistic interac-tions between mechanical erosive wearprocesses and electrochemical corrosive pro-cesses is recommended. This should allowcorrect wall wastage rates to be predicted andthe safety factors associated with componentwall thicknesses to be adjusted.
6. Inherently passive surfaces should beselected, where appropriate, with knowledgeof their repassivation kinetics and properties.
7. Sacrificial components (bends, tees,elbows) can be used in systems that allow easyreplacement and are relatively cheap.

References 425
Special geometries, such as plugged tees orflow expansion sections, can be used that mini-mize erosion by reducing the energy of solid-particle impingement by decelerating the flowfield or the impingement angle.
6.09.8 REFERENCES
Ahmed, M., Singh, S. N., and Seshadri, V. 1993.Distribution of solid particles in multisized particulateslurry flow through a 90� pipe bend in horizontal plane.Bulk Solids Handl. 13(2), 379–385.
Al-Hosani, H. I., Saber, T. M. H., Mohammed, R. A., andShams El Din, A. M. 1997. Galvanic corrosion of copperbase alloys in contact with molybdenum-containingstainless steels in Arabian Gulf water. Desalination 109,25–37.
Allen, C. and Ball, A. 1996. A review of the performance ofengineering materials under prevalent tribological andwear situations in South African industries. Tribol. Int.29(2), 105–116.
Al-Shamma’a, A. I., Tanner, R., Shaw, A., and Lucas,J. 2003. On line EM wave sand monitoring sensorfor oil industry. In: 33rd European MicrowaveConference, IEEE Conference Proceedings, vols.1–3, pp. 535–538.
ASTM G 119-93. 1993. Standard Guide for DeterminingSynergism between Wear and Corrosion. AmericanSociety for Testing and Materials, West Conshohocken,PA.
ASTM G4-95. 1995. Standard Guide for conducting corro-sion coupon tests in field applications. American Societyfor Testing and Materials, West Conshohocken, PA.
Barik, R. C., Wharton, J. A., Wood, R. J. K., andStokes, K. R. 2004. Galvanic corrosion of nickel–aluminium bronze coupled to titanium or Cu–15Ni alloyin brackish seawater. Eurocorr 2004, Nice, paper 330.
Bergevin, K. 1984. Effect of slurry velocity on the mechan-ical and electrochemical components of erosion–corrosion in vertical pipes. Master’s thesis, University ofSaskatchewan.
Bitter, J. G. A. 1963. A study of erosion phenomena.Wear 6,5–21.
Blackwelder, R. F. 1989. Some ideas on the control of near-wall eddies. AIAA, paper 89–1009.
Blanchard, D. J., Griffith, P., and Rabinowicz, E. 1984.Erosion of a pipe bend by solid particles entrained intowater. J. Eng. Ind. 106, 213–217.
Bourgoyne, A. T. 1989. Experimental study of erosion indiverter systems due to sand production. SPE/IADCDrilling Conference, p. 807.
Bozzini, B., Ricotti, M. E., Boniardi, M., and Mele, C.2003. Evaluation of erosion–corrosion in multiphaseflow via CFD and experimental analysis. Wear 255,237–245.
Cantwell, B. J. 1981. Organized notion in the turbulentboundary layer. Annu. Rev. Fluid Mech. 13, 457–515.
Carpentier, B. and Cerf, O. 1993. Biofilms and their con-sequences, with particular reference to hygiene in thefood industry. J. Appl. Bacteriol. 75, 499–511.
Chen, X., McLaury, B. S., and Shirazi, S. A. 2002.Proceedings of ASME 2002 Fluids Engineering DivisionSummer Meeting. Montreal, QC, paper FEDSM2002-31289.
Chen, X. H., McLaury, B. S., and Shirazi, S. A. 2004.Application and experimental validation of a computa-tional fluid dynamics (CFD)-based erosion predictionmodel in elbows and plugged tees. Comput. Fluids33(10), 1251–1272.
Clark, H. M. and Llewellyn, R. J. 2001. Assessment of theerosion resistance of steels used for slurry handling and
transport in mineral processing applications. Wear 250,32–44.
Craig, B. D. 1991. Fundamental Aspects of Corrosion Filmsin Corrosion Science, Chapter 7, pp. 165–190. Plenum,New York.
Cottis, R. and Turgoose, S. 1999. ElectrochemicalImpedance and Noise, ISBN 1-57590-093-9. NationalAssociation of Corrosion Engineers, Houston.
Donohue, G. L., Tiedermann, W. G., and Reischman,M. M. 1972. Flow visualization of the near-wall regionin a drag reducing channel flow. Fluid Mech. 56, 559–575.
Douglas, J. F., Gasiorek, J. M., Swaffield, J. A., andJack, L. B. 2005. Fluid Mechanics, 5th ed. Pearson,Harlow.
Duddridge, J. E., Kent, C. A., and Laws, J. F. 1982. Effectof surface shear stress on the attachment of Pseudomonasfluorescens to stainless steel under defined flow condi-tions. Biotechnol. Bioeng. 24, 153–164.
Duignan, M. R. and Lee, S. Y. 2002. RPP-WTP SlurryWear Evaluation: Literature Review, WSRC-TR-2001-00156. Westinghouse Savannah River Company, Aiken,SC. http://sti.srs.gov/fulltext.
Faddick, R. R. 1982. Wear in Pipes: Short Course on SlurryPipelining Technology, pp. 1–15. Camborne School ofMines, University of Exeter, Devon.
Forder, A. A. 2000. Computational Fluid DynamicsInvestigation into the Particulate Erosion of OilfieldControl Valves. Ph.D. thesis, School of EngineeringSciences, University of Southampton.
Forder, A., Thew, M. T., and Harrison, D. 1998. A numer-ical investigation of solid particle erosion experienceswithin oilfield control valves. Wear 216, 184–193.
Ferng, Y. M., Ma, Y. P., Ma, K. T., and Chung, N. M.1999. A new approach for investigation of erosion–corro-sion using local flow models. Corrosion 55(4), 332–342.
Ferng, Y. M., Ma, Y. P., and Chung, N. M. 2000.Application of local flowmodels in predicting distributionsof erosion–corrosion locations. Corrosion 56(2), 116–126.
Finlay, J. A., Callow, M. E., Schultz, M. P., Swain, G. W.,and Callow, J. A. 2002. Adhesion strength of settledspores of the green alga Enteromorpha. Biofouling 18,251–256.
Finnie, I. 1972. Some observations on the erosion of ductilemetals.. Wear 19, 81–90.
Flemming, H. C. 2002. Biofouling in water systems – cases,causes and countermeasures. Appl. Microbiol. Biot. 59,629–640.
Gane, N. and Murray, M. S. 1979. The transition fromploughing to cutting in erosive wear. Proceedings of the5th International Conference on Erosion by Solid andLiquid Impact. Cambridge, UK, paper 40, pp. 1–8.
Gant, A. J., Gee, M. G., and May, A. T. 2004a.Microabrasion of WC-Co hardmetals in corrosivemedia. Wear 256(9–10), 500–516.
Gant, A. J., Gee, M. G., and May, A. T. 2004b. Theevaluation of tribo-corrosion synergy for WC-Co hard-metals in low stress abraision. Wear 256(5), 500–516.
Gee, M. G., Phatak, C., and Darling, R. 2005.Determination of wear mechanisms by stepwise erosionand stereological analysis. Wear 258(104), 412–425.
Geesey, G. G., Jang, L., Jolley, J. G., Hankins, M. R.,Iwaoka, T., and Griffiths, P. R. 1988. Binding of metalions by extracellular polymers of biofilm bacteria. WaterSci. Technol. 20, 161–165.
Guo, H. X., Lu, B. T., and Luo, J. L. 2005. Interaction ofmechanical and electrochemical factors in erosion–corro-sion of carbon steel. Electrochim. Acta 51(2), 315–323.
Harvey, T. J., Wharton, J. A., and Wood, R. J. K. 2006.Development of a model for predicting erosion–corro-sion in a slurry pot. Report for NPL. Surface andCoatings Technology (submitted).
Hashish, M. 1998. An improved model of erosion by solidparticles. Proceedings of the 7th International

426 Erosion/Corrosion
Conference on Erosion by Liquid and Solid Impact,paper 66. Cavendish Laboratory, Cambridge, UK.
Haugen, K., Kvernvold, O., Ronald, A., and Sandberg, R.1995. Sand erosion of wear-resistant materials: Erosion inchoke valves. Wear 186–187, 179–188.
Hodgkiess, T., Neville, A., and Shrestha, S. 1999.Electrochemical and mechanical interactions during ero-sion–corrosion of a high-velocity oxy-fuel coating and astainless steel. Wear 235, 623–634.
Hu, X. and Neville, A. 2005. The electrochemical responseof stainless steels in liquid–solid impingement. Wear258(1–4), 641–648.
Hutchings, I. M. 1992. Tribology – Friction and Wear ofEngineering Materials. Arnold, London.
Jemmely, P., Mischler, S., and Landolt, D. 2000.Electrochemical modelling of passivation phenomena intribocorrosion. Wear 237, 63–76.
Johnston, J. M., Rathmell, S. K., Easterbrook-Smith, S. B.,Wilson, M. R., and De Bruyn, H. J. 1996. Current corro-sion monitoring trends in the petrochemical industry.Int. J. Pressure Vessels Piping 66, 293–303.
Jucker, B. A., Zehnder, A. J. B., and Harms, H. 1998.Quantification of polymer interactions in bacteria adhe-sion. Environ. Sci. Technol. 32, 2909–2915.
Karimi, A. and Schmid, R. K. 1992. Ripple formation insolid–liquid erosion. Wear 156, 33–47.
Keating, A. and Nesic, S. 2001. Numerical prediction oferosion–corrosion in bends. Corrosion 57(7), 621–633.
King, R., Jacobs, B., and Jones, G. 1991. Factors affectingthe design of slurry transport systems for minimum wear.Pipe Protection Conference, Cannes, p. 67.
Kim, H. T., Kline, S. J., and Reynolds, W. C. 1971. Theproduction of turbulence near a smooth wall in a turbu-lent boundary layer. J. Fluid Mech. 50, 133–160.
Kim, J. G., Choi, Y. S., Lee, H. D., and Chung, W. S. 2003.Effects of flow velocity, pH, and temperature on galvaniccorrosion in alkaline-chloride solutions. Corrosion 59(2),121–129.
Kline, S. J., Reynolds, W. C., Schraub, F. A., andRundstrandler, P. 1967. The structure of turbulentboundary layers. J. Fluid Mech. 30, 741–773.
Levin, B. F., Dupont, J. N., and Marder, A. R. 1995. Weldoverlay coatings for erosion control. Wear 181(2),810–820.
Levy, A. V. 1995. Solid Particle Erosion And Erosion–Corrosion of Materials. ASM International, OH, ISBN:0-87170-519-2.
Loeb, G. I. and Neihof, R. A. 1977. Adsorption of anorganic film at a platinum seawater interface. J. Mar.Res. 35, 283–291.
Madge, D. N., Romero, J., and Strand, W. L. 2004.Hydrocarbon cyclones in hydrophilic oil sand environ-ments. Miner. Eng. 17(5), 625–636.
Matthews, A. 2005. The future of plasma-based surfaceengineering techniques in tribology, 3rd WorldTribology Congress, Washington DC, paper WTC2005-64180.
McIntyre, P. April 1999. Marine Corrosion Club Meeting,Aberdeen.
Melo, L. F. and Vieira, M. J. 1999. Physical stability andbiological activity of biofilms under turbulent flow andlow substrate concentration. Bioprocess Eng. 20,363–368.
Meng, H. C. and Ludema, K. C. 1995. Wear models andpredictive equations: Their form and content. Wear181–183, 443–457.
Moore, A. J. and Wood, R. J. K. 1992. Erosive wear map-ping of pipeline materials. Plastic Pipes VIII Conference,Koningshof, paper E1/4, pp. 1–10.
Muller, R. F., Characklis, W. G., Jones, W. L., and Sears,J. T. 1992. Characterization of initial events in bacterialsurface colonization by two Pseudomonas species usingimage analysis. Biotechnol. Bioeng. 39, 1161–1170.
Mylvaganam, S. 2003. Some applications of acoustic emis-sion in particle science and technology. Particulate Sci.Technology 21(3), 293–301.
Neilson, J. H. and Gilchrist, A. 1968. An experimentalinvestigation into aspects of erosion of rocket motor tailnozzles. Wear 11, 123–143.
Nesic, S., Bienkowski, J., Bremhorst, K., and Yang, K. S.2000. Testing for erosion–corrosion under disturbed flowconditions using a rotating cylinder with a stepped sur-face. Corrosion 56(10), 1005–1014.
Neville, A. and Hu, X. 2001. Mechanical and electrochemi-cal interactions during liquid–solid impingement on high-alloy stainless steels. Wear 251, 1284–1294.
Neville, A., Reyes, M., and Xu, H. 2002. Examining corro-sion effects and corrosion/erosion interactions onmetallic materials in aqueous slurries. Tribol. Int.35(10), 643–650.
Oltra, R., Chapey, B., and Renuad, L. 1995. Abrasion–corrosion studies of passive stainless steels in acidicmedia: Combination of acoustic emission and electroche-mical techniques. Wear 186–187, 533–541.
Oxford English Dictionary Online. 2006. Oxford UniversityPress.
Paradies, H. H. 1995. Chemical and physicochemicalaspects of metal biofilm. In: Bioextraction andBiodeterioration of Metals (eds. C. C. Gaylarde andH. A. Videla), pp. 197–269. Cambridge UniversityPress, Cambridge.
Panton, R. L. 1984. Incomprehensible Flows, p. 717. Wiley/Interscience, New York.
Percy, R. J. 1990. The operational performance of BP chokevalves, BP engineering, risers and subsea equipmentgroup. BPE.90.ER152 (unpublished).
Pletcher, D. 1991. A First Course in Electrode Processes.The Electrochemical Consultancy, Romsey.
Poulson, B. 1999. Complexities in predicting erosion–corro-sion. Wear 233–235, 497–504.
Puget, Y., Wood, R. J. K., and Trethewey, K. R. 1999.Electrochemical noise analysis of polyurethane coated steelsubjected to erosion–corrosion.Wear 233–235, 552–567.
Puget, Y., Wood, R. J. K., and Trethewey, K. R. 1999.Electrochemical noise analysis of polyurethane coated steelsubjected to erosion–corrosion.Wear 233–235, 552–567.
Racz, I. G., Wassink, J. G., and Klaassen, R. 1986. Masstransfer, fluid flow and membrane properties in flat andcorrugated plate hyperfiltration modules. Desalination60, 213–222.
Robinson, S. K. 1991. Coherent motions in the turbulentboundary layer. Annu. Rev. Fluid Motion 23, 601–639.
Roberge, P. 2004. Erosion–Corrosion. Corrosion TestingMade Easy Series. NACE International, Houston.
Roe, F. L., Lewandowski, Z., and Funk, T. 1996.Simulating microbiologically influenced corrosion bydepositing extracellular biopolymer on mild steel sur-faces. Corrosion 52, 744–752.
Sasaki, K. and Burstein, G. T. 2000. Observation of athreshold impact energy required to cause passive filmrupture during slurry erosion of stainless steel. Phil. Mag.Lett. 80(7), 489–493.
Scrivani, A., Ianelli, S., Rossi, A., Groppetti, R., Casadei,F., and Rizzi, G. 2001. A contribution to the surfaceanalysis and characterisation of HVOF coatings for pet-rochemical application. Wear 250(1), 107–113.
Sedamed, G. H., Abdo, M. S. E., Amder, M., and El-Latif,G. A. 1998.Mass transfer at a pipe inlet zone in relation toimpingement. Int. Comm. Heat Mass Transfer 443–451.
Shimoda, K. and Yukawa, T. 1983. Erosion of pipe bend inpneumatic conveyer. Proceedings of the 6th InternationalConference on Erosion by Liquid and Solid Impact,University of Cambridge, paper 59.
Silverman, D. C. 2004. The rotating cylinder electrode forexamining velocity-sensitive corrosion – a review.Corrosion 60(11), 1003–1023.

References 427
Souza, V. A. D. and Neville, A. 2005. Corrosionand synergy in a WC-Co-Cr HVOF thermal spray coat-ing – understanding their role in erosion–corrosiondegradation. Wear 259(1–6), 171–180.
Stack, M. M. and Jana, B. D. 2005. Modelling particulateerosion–corrosion regime transitions for Al/Al2O3 andCu/Al2O3 MMCs in aqueous conditions. Tribol. Int.38(11–12), 995–1006.
Stack, M. M. and Pungiwiwat, N. 2002. Particulate ero-sion–corrosion of Al in aqueous conditions: Someperspectives on pH effects on the erosion–corrosionmap. Tribol. Int. 35(10), 651–660.
Stack, M. M., Corlett, N., and Turgoose, S. 2003. Somethoughts on modelling the effects of oxygen and particleconcentration on the erosion–corrosion of steels in aqu-eous slurries. Wear (Part 1) 255, 225–236.
Stack, M. M., Zhou, S., and Newman, R. C. 1995.Identification of transitions in erosion–corrosion regimesin aqueous environments. Wear 186–187, 523–532.
Stemp,M., Mischler, S., and Landolt, D. 2003. The effect ofmechanical and electrochemical parameters on the tribo-corrosion rate of stainless steel in sulphuric acid. Wear255(1–6), 466–475.
Szyprowski, A. J. 2003. Methods of investigation on hydro-gen sulphide corrosion of steel and its inhibitors.Corrosion 59(1), 68–81.
Tan, K. S., Wharton, J. A., and Wood, R. J. K. 2005. Solidparticle erosion–corrosion behaviour of a novel HVOFnickel aluminium bronze coating for marine applica-tions—correlation between mass loss andelectrochemical measurements. Wear 258, 629–640.
Taylor, G. T., Zheng, D., Lee, M., Troy, P. J., Gyananath,G., and Sharma, S. K. 1997. Influence of surface proper-ties on the accumulation of conditioning films andmarinebacteria on substrata exposed to oligotrophic waters.Biofouling 11, 31–57.
Trethewey, K. R. and Chamberlain, J. 1995. Corrosion forScience and Engineering, 2nd edn. Addison WesleyLongman, London.
Turchaninov, S. P. 1973. The Life of HydrotransportPipelines. Nedra Press, Moscow.
Walsh, D., Pope, D., Danford, M., and Huff, T. 1993. Theeffect of microstructure on microbiologically influencedcorrosion. J. Min. Met. Mater. Soc. 45, 22–30.
Wang, H. W. and Stack, M. M. 2000. The erosive wear ofmild steel and stainless steels under controlled corrosionin alkaline slurries containing alumina particles. J.Mater.Sci. 35, 5263–5273.
Wharton, J. A. and Wood, R. J. K. 2004. Influence of flowconditions on the corrosion of AISI 304L stainless steel.Wear 256, 525–536.
Wharton, J. A., Barik, R. C., Kear, G., Wood, R. J. K.,Stokes, K. R., and Walsh, F. C. 2005. The corrosion ofnickel–aluminium bronze in seawater. A Century ofTafel’s Equation: A Commemorative Issue of CorrosionScience 47(12), 3336–3367.
Wheeler, D. W. and Wood, R. J. K. 2005. Erosion of hardsurface coatings for use in offshore gate valves.Wear 258,526–536.
Wiedenroth, W. 1984. An experimental study of wear ofcentrifugal pumps and pipeline components. J. Pipelines4, 223–228.
Copyright 2007, Elsevier Ltd. All Rights Reserved.No part of this publication may be reproduced, stored in any retrieval system ortransmitted in any form or by any means: electronic, electrostatic, magnetic tape,mechanical, photocopying, recording or otherwise, without permission in writingfrom the publishers.
Wijeyekoon, S., Mino, T., Satoh, H., and Matsuo, T. 2000.Growth and novel structural features of tubular biofilmsproduced under different hydrodynamic conditions.Water Sci. Technol. 41, 129–138.
Wood, R. J. K. 1992. Erosion–corrosion synergism formulti-phase flowline materials. La Houille Blanche 7–8,605–610.
Wood, R. J. K. 2004. Challenges of living with erosion–corrosion. Second International Symposium onAdvanced Materials for Fluid Machinery, IMechEConference Transactions (1), paper S965/008/2004,113–132, ISBN 1 86058 441 1. Professional EngineeringPublishing, Bury St Edmunds.
Wood, R. J. K. 2004a. Erosion–corrosion interactions andtheir effects on marine and offshore components.Keynote at EuroCorr Conference, Nice, France andaccepted for publication in the Special Issue onTribocorrosion, Wear 2006.
Wood, R. J. K. and Hutton, S. P. 1990. The synergisticeffect of erosion and corrosion: Trends in publishedresults. Wear 140, 387–394.
Wood, R. J. K. and Jones, T. F. 2003. Investigations ofsand–water induced erosive wear of AISI 304L stainlesssteel pipes by pilot-scale and laboratory-scale testing.Wear 255, 206–218.
Wood, R. J. K. and Wharton, J. A. 2002. The influenceof chloride concentrations on the erosion–corrosion ofAISI 304L stainless steel in alkaline slurries. 15thInternational Conference on Hydrotransport, Banff,vol. 1, 173–186.
Wood, R. J. K. and Speyer, A. J. 2004. Erosion–corrosionof candidate HVOF aluminium based marine coatings.Wear 256(5), 545–556.
Wood, R. J. K., Hutton, S. P., and Schiffrin, D. J. 1990.Mass transfer effects of non-cavitating seawater on thecorrosion of Cu and 70–30 Cu–Ni. Corros. Sci. J. 30(12),1177–1201.
Wood, R. J. K., Mellor, B. G., and Binfield, M. L. 1997.Sand erosion performance of detonation gun appliedtungsten carbide/cobalt–chromium coatings. Wear 211,70–83.
Wood, R. J. K., Jones, T. F., Miles, N. J., andGaneshalingam, J. 2001. Upstream swirl-induction forreduction of erosion damage from slurries in pipelinebends. Wear 250(1–12), 771–779.
Wood, R. J. K., Jones, T. F., Ganeshalingam, J., andWang,M. 2002a. Erosion modelling of swirling and non-swir-ling slurries in pipes. Hydrotransport 15, Banff, BHRGroup, 497.
Wood, R. J. K., Jones, T. F., and Ganeshalingam, J.2002b. Erosion in swirl inducing pipes. ASMEFluids Engineering Division Summer Meeting,Montreal, paper FEDSM2002-31287, ASMEInternational.
Wood, R. J. K., Wharton, J. A., Speyer, A. J., and Tan,K. S. 2002c. Investigation of erosion–corrosion pro-cesses using electrochemical noise. Tribol. Int. 35,631–641.
Wood, R. J. K., Jones, T. F., Ganeshalingam, J., andMiles,N. J. 2004. Comparison of predicted and experimentalerosion estimates in slurry ducts. Wear 256(9–10),937–947.
Comprehensive Structural IntegrityISBN (set): 0-08-043749-4
Volume 6; (ISBN: 978-0-0804-3749-1); pg. 395–427