Embed Size (px)
Citation preview

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 1/30
Queueing Syst (2013) 74:273–302
DOI 10.1007/s11134-012-9324-8
Erlang arrivals joining the shorter queue
Ivo J.B.F. Adan · Stella Kapodistria ·
Johan S.H. van Leeuwaarden
Received: 2 November 2011 / Revised: 16 April 2012 / Published online: 17 August 2012
© Springer Science+Business Media, LLC 2012
Abstract We consider a system in which customers join upon arrival the shortest
of two single-server queues. The interarrival times between customers are Erlang
distributed and the service times of both servers are exponentially distributed. Un-
der these assumptions, this system gives rise to a Markov chain on a multi-layered
quarter plane. For this Markov chain we derive the equilibrium distribution using the
compensation approach. The expression for the equilibrium distribution matches and
refines tail asymptotics obtained earlier in the literature.
Keywords Random walks in the quarter plane · Compensation approach · Join the
shorter queue · Tail asymptotics
Mathematics Subject Classification 60K25 · 90B22
1 Introduction
Consider a system of two single-server queues, in which a customer on arrival joins
the shorter queue. The service times of customers are independent and exponentially
distributed with mean one, irrespective of the queue they have joined. The arrivals
I.J.B.F. Adan
Department of Mechanical Engineering, Eindhoven University of Technology, P.O. Box 513,
5600 MB Eindhoven, The Netherlands
e-mail: [email protected]
S. Kapodistria () · J.S.H. van LeeuwaardenDepartment of Mathematics and Computer Science, Eindhoven University of Technology,
P.O. Box 513, 5600 MB Eindhoven, The Netherlands
e-mail: [email protected]
J.S.H. van Leeuwaarden
e-mail: [email protected]

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 2/30
274 Queueing Syst (2013) 74:273–302
form a renewal process with Erlang interarrival times with mean k/λ, so that each
interarrival time consists of k independent exponential phases with mean 1/λ. Under
these Markovian assumptions, the evolution of the system can be described as a three-
dimensional Markov chain, whose state space consists of a k-layered quarter plane.
When ρ = λ/2k < 1 this Markov chain is ergodic and the equilibrium distributionexists. In this paper we derive an explicit expression for the equilibrium distribution
in terms of an infinite series of geometric terms.
The shorter-queue model with Poisson arrivals (k = 1) was originally proposed by
Haight [8]. Kingman [9] came up with an ingenious approach for finding the equi-
librium distribution. Kingman first transformed the state space such that the queue
length process can be described by a random walk in the quarter plane, next defined
the bivariate generating function of the equilibrium distribution implicitly in terms
of a functional equation, and finally solved the functional equation using complex
analysis. Kingman’s work was the first of many papers exploiting the connection be-
tween two-dimensional random walks in the quarter plane and functional equations.
For the general class of random walks in the quarter plane Malyshev pioneered this
approach in the 1970s, and the theory has advanced since, via applications such as
lattice path counting and two-server queueing models. The crucial idea was to re-
duce the functional equations to classical boundary value problems, and extensive
treatments of this technique can be found in Cohen and Boxma [5] and Fayolle et
al. [6]. It typically concerns sophisticated complex analysis, Riemann surfaces and
conformal mappings.
Kingman’s solution to the functional equation for the shortest queue problem,
however, was simple and elegant, and only required an iterative mapping that wasshown to lead to a convergent solution. In fact, it was shown later that Kingman’s
solution could be obtained without using the functional equation, and by solving the
equilibrium equations directly. This direct method was called the compensation ap-
proach and developed in a series of papers [1, 2, 4]. It exploits the fact that the (linear)
equilibrium equations in the interior of the quarter plane are satisfied by linear com-
binations of product forms, the parameters of which satisfy a kernel equation, and
that need to be chosen such that the equilibrium equations on the boundaries are sat-
isfied as well. As it turns out, this can be done by alternatingly compensating for the
errors on the two boundaries, which eventually leads to an infinite series of productforms that matches the solution of Kingman. In [1, 2, 4], the compensation approach
has been shown to work for two-dimensional random walks on the lattice of the first
quadrant that obey the following conditions:
• Step size: Only transitions to neighboring states.
• Forbidden steps: No transitions from interior states to the North, North-East, and
East.
• Homogeneity: The same transitions occur according to the same rates for all in-
terior points, and similarly for all points on the horizontal boundary, and for all
points on the vertical boundary.
Although the theory has been developed for two-dimensional random walks with
only one layer, this paper demonstrates that it can also be applied to random walks
with multiple layers. For this, we have to extend the compensation approach to a
three-dimensional setting.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 3/30
Queueing Syst (2013) 74:273–302 275
Random walks in the quarter plane play the role of a canonical example for ob-
taining tail asymptotics for equilibrium distributions. Indeed, random walks in the
quarter plane present serious challenges to the traditional approaches for obtaining
tail asymptotics. These approaches include large-deviations theory, matrix-analytic
methods, and complex-function methods. A comprehensive overview of the state of the art in this field is given in [12]. Our contribution to this area is that, for the special
case of the shorter-queue model with Erlang arrivals, we obtain an exact expression
for the equilibrium distribution, which, by its nature, also reveals the tail asymptotics,
including leading-order behavior, correction terms and explicit error estimates. Our
exact results yield asymptotic results that match and refine those obtained in [ 13].
The paper is organized as follows. In Sect. 2 we describe the model in full detail.
In Sect. 3 we present a first result on the decay rate of the shortest queue length.
In Sect. 4 we develop the three-dimensional compensation approach. In Sect. 5 we
present an explicit expression for the equilibrium distribution. Finally, we presentsome conclusions in Sect. 6.
2 Model description
Consider a system consisting of two identical servers, in which the service times of
customers are independent and exponentially distributed with mean one, irrespective
of the queue they have joined. The interarrival times between consecutive customers
follow an Erlang distribution with mean k/λ, consisting of k exponential phases, each
with mean 1/λ. Upon arrival a customer joins the shortest queue, and in case of a tie,the customer joins either queue with probability 1/2. This system is stable if and
only if ρ = λ/2k < 1. The stability condition can be easily proven as follows. We
know that the number of jobs in this shortest queue system is stochastically larger
than in the Ek/M/2 queue with FCFS discipline (see [7] and the references therein).
On the other hand, it is stochastically smaller than in the system where each server
has his own waiting line and customers are assigned to either line with probability
1/2 (see [10]). Since both bounding models have the same stability condition ρ < 1,
we conclude that this condition is necessary and sufficient to ensure stability for the
shortest queue system.An Erlang arrival process assumes that each customers first goes through k in-
dependent exponential phases before arriving to the system. Let R(t) denote the
phase of the customer to arrive next at time t . Further, let Qi (t ) denote the stochastic
process describing the number of jobs in queue i at time t . For convenience intro-
duce X1(t) = min{Q1(t),Q2(t)} and X2(t) = |Q1(t ) − Q2(t )|. Then the dynam-
ics of the queueing system can be described by a continuous-time Markov chain
{(R(t),X1(t),X2(t)),t ≥ 0}, with state space {(h,m,n),h = 0, 1, . . . , k − 1,m ,n =0, 1, . . .}, where h is the number of completed phases of arrival, m the length of the
shortest queue and n the difference between the longest and the shortest queue. Underthe stability condition ρ = λ/2k < 1, we shall determine the equilibrium distribution
p(h,m,n) = limt →∞P
R(t),X1(t),X2(t )
= (h,m,n)
,
h = 0, 1, . . . , k − 1,m ,n = 0, 1, . . .

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 4/30
276 Queueing Syst (2013) 74:273–302
of this three-dimensional Markov chain. The transition rates are given by
(h,m,n) 2kρ−−−→ (h + 1, m, n), h = 0, . . . , k − 2, m ≥ 0, n ≥ 0,
(k − 1,m,n) 2kρ
−−−→ (0, m + 1, n − 1), m ≥ 0, n ≥ 1,
(k − 1, m, 0) 2kρ−−−→ (0, m, 1), m ≥ 0,
corresponding to arrivals, and
(h,m,n) 1−−→ (h,m − 1, n + 1), h = 0, . . . , k − 1, m ≥ 1, n ≥ 1,
(h,m,n) 1−−→ (h,m,n − 1), h = 0, . . . , k − 1, m ≥ 0, n ≥ 1,
(h,m, 0) 2−−→ (h,m − 1, 1), h = 0, . . . , k − 1, m ≥ 1,
corresponding to service completions.
The equilibrium equations then read
2kρp(h, 0, 0) = p(h, 0, 1) + 2kρ(1 − δh,0)p(h − 1, 0, 0), (2.1)
(2kρ + 1)p(h, 0, 1) = p(h, 0, 2) + 2p(h, 1, 0) + 2kρδh,0p(k − 1, 0, 0)
+2kρ(1
−δh,0)p(h
−1, 0, 1), (2.2)
(2kρ + 1)p(h, 0, n) = p(h, 1, n − 1) + p(h, 0, n + 1)
+ 2kρ(1 − δh,0)p(h − 1, 0, n), n ≥ 2, (2.3)
2(kρ + 1)p(h,m, 0) = p(h,m, 1) + 2kρδh,0p(k − 1, m − 1, 1)
+ 2kρ(1 − δh,0)p(h − 1, m, 0), m ≥ 1, (2.4)
2(kρ + 1)p(h,m, 1) = p(h,m, 2) + 2p(h,m + 1, 0) + 2kρδh,0p(k − 1, m − 1, 2)
+2kρδh,0p(k
−1, m, 0)
+ 2kρ(1 − δh,0)p(h − 1, m, 1), m ≥ 1, (2.5)
2(kρ + 1)p(h,m,n) = p(h,m,n + 1) + p(h,m + 1, n − 1)
+ 2kρδh,0p(k − 1, m − 1, n + 1)
+ 2kρ(1 − δh,0)p(h − 1, m, n), m ≥ 1, n ≥ 2, (2.6)
where h = 0, . . . , k − 1 and δi,j denotes the Kronecker delta taking value 1 when i =j and 0 otherwise. Consider the column vector p(m,n)
= (p(0,m,n),p(1,m,n),
. . . , p ( k −1,m,n))T , with xT the transpose of a vector x. We introduce the followingmatrix notation to describe the equilibrium equations:
A0,0p(0, 0) +A0,−1p(0, 1) = 0, (2.7)
B0,0p(0, 1) +A0,−1p(0, 2) + 2A−1,1p(1, 0) +A0,1p(0, 0) = 0, (2.8)

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 5/30
Queueing Syst (2013) 74:273–302 277
B0,0p(0, n) +A0,−1p(0, n + 1) +A−1,0p(1, n − 1) = 0, n ≥ 2, (2.9)
C0,0p(m, 0) +A0,−1p(m, 1) +A1,−1p(m − 1, 1) = 0, m ≥ 1, (2.10)
C0,0p(m, 1) +A0,−1p(m, 2) + 2A−1,1p(m + 1, 0) +A1,−1p(m − 1, 2)
+A0,1p(m, 0) = 0, m ≥ 1, (2.11)
C0,0p(m,n) +A0,−1p(m,n + 1) +A−1,1p(m + 1, n − 1)
+A1,−1p(m − 1, n + 1) = 0, m ≥ 1, n ≥ 2, (2.12)
where
A0,−1 =A−1,1 =A−1,0 = I k,
A0,1 =
A1,−1 =
2kρM (1,k)
k ,
A0,0 = −2kρI k + 2kρLk,
B0,0 = −(2kρ + 1)I k + 2kρLk,
C0,0 = −2(kρ + 1)I k + 2kρLk,
with I k the k × k identity matrix, M (i,j)k a k × k binary matrix with element (i, j)
equal to one and zeros elsewhere, and Lk a lower shift matrix with elements (i,i −1),
i = 2, . . . , k, equal to one and zeros elsewhere.
3 Decay rate
Sakuma et al. [13] studied the shorter-queue model with phase-type arrivals (of which
Erlang arrivals are a special case). They combined matrix-analytic techniques with
general results for decay rates of quasi-birth-death processes to establish the follow-
ing result. (Although the result in [13] is more general, here we present the result
for the special case of Erlang arrivals.) Let σ denote the unique positive real root of
σ = A(2(1 − σ )) inside the open unit circle, with A(s) the Laplace–Stieltjes trans-form of the interarrival time distribution.
Proposition 3.1 (Sakuma et al. [13]) For h = 0, 1, . . . , k − 1,
limm→∞ σ −2mp(h,m,n) = Kh,1βn
1 + Kh,2βn2 + · · ·+ Kh,kβn
k (3.1)
with β1, . . . , βk and Kh,1, . . . , Kh,k constants that do not depend on m.
Proposition 3.1 can be understood by comparing the shorter-queue model with
the corresponding G/M/2 model with one queue, two servers, phase-type arrivals
with mean interarrival time 1/2ρ and mean service time one. Let Q1 and Q2 denote
the steady-state queue length in the original shorter-queue model, and let Q denote
the steady-state queue length in the G/M/2 model with one queue. It is then ex-
pected that P(Q1 + Q2 = m) and P(Q = m) have the same decay rate, since both

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 6/30
278 Queueing Syst (2013) 74:273–302
systems will work at full capacity whenever the total number of customers grows
large. Moreover, since the join-the-shorter-queue discipline constantly aims at bal-
ancing the lengths of the two queues over time, it is expected that, for large values
of m,
P
min(Q1, Q2) = m≈ P(Q1 + Q2 = 2m) ≈ P(Q = 2m). (3.2)
For the standard G/M/2 model with one queue, it is well known that
P(Q = m) ≈ (1 − σ )σ m. (3.3)
Notice that in case of Erlang arrivals σ is the unique root in (0, 1) of
σ = kρ
kρ
+1
−σ
k
. (3.4)
Combining (3.2) and (3.3) leads to the following conjectured behavior of the tail
probability of the minimum queue length;
P
min(Q1, Q2) = m≈ cσ 2m, m → ∞, (3.5)
for some positive constant c. Hence, the decay rate of the tail probabilities for
min(Q1, Q2) is conjectured to equal the square of the decay rate of the tail probabili-
ties of Q. Proposition 3.1 thus proves this conjecture, for the case when the difference
of the queue sizes and the arrival phase are fixed. In [ 13] it was left as an open prob-
lem to determine the decay rate of the marginal distribution of min(Q1, Q2). The
latter does not follow immediately from Proposition 3.1, because the summation of
the difference in queue sizes, which can be unbounded, requires a formal justifica-
tion. In this paper, we derive an exact expression for p(h,m,n), which, among other
things renders the following result.
Proposition 3.2
limm→∞ σ −2m
P
min(Q1, Q2) = m=
kj =1
κj
1 − βj (3.6)
with κj =k−1
h=0 Kh,j .
The proof of Proposition 3.2 along with several other asymptotic results is given in
Sect. 5.
4 The compensation procedure
In this section we shall present a series of preliminary results that together will lead to
the full solution of the equilibrium equations reported in Sect. 5. We start by exploit-
ing the intuition developed in Sect. 3 about the tail asymptotics in (3.5). In order to
establish that the equilibrium distribution p(h,m,n) is indeed of a form that would

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 7/30
Queueing Syst (2013) 74:273–302 279
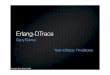
Fig. 1 k-layered transition rate diagram with H = {0, 1, . . . , k − 1}
yield the asymptotics of the type (3.5) we first consider a modified model that is
closely related to the original model and that is expected to give the same asymptotic
behavior.
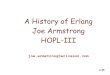
The modified model is constructed as follows. We start from the state space of
the model illustrated in Fig. 1 and bend the vertical axis as shown in Fig. 2 to cre-
ate a modified model that has the same equilibrium equations in the interior and on
the horizontal boundary. This model has only equations (2.10)–(2.12) as equilibrium
equations and can be recognized as the Erlang arrivals joining the shorter queue in a
two-server production system with the additional feature that when one of the queuesis left empty the server works in advance and puts the produced items on stock. Then,
when a customer arrives, he takes immediately a product from the stock and leaves
the system, and when both queues are empty again, the stock is cleared. More specif-
ically, the state (h, −m,n) for h = 0, 1, . . . , k − 1, m = 1, 2, . . . , n and n = 1, 2, . . .
corresponds to the number of completed arrival phases to be h, the stock level to be
m and the difference between the longest and the shortest queue to be n.
A characteristic feature of the modified model is that its equilibrium equations for
m + n = 0 are exactly the same as the ones in the interior; in this sense the modified
model has no “vertical” boundary equations.
We now present two lemmas. The first lemma gives a product form solution for
the modified model. The second lemma gives a similar product form solution for the
original model via exploiting the relation with the modified model. Let p(m,n) =( p(0,m,n), p(1,m ,n),..., p(k − 1,m,n))T denote the equilibrium distribution of
the modified model.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 8/30
280 Queueing Syst (2013) 74:273–302
Fig. 2 k-layered transition rate diagram for the modified model with H = {0, 1, . . . , k − 1}
Lemma 4.1 For ρ < 1, the equilibrium distribution of the modified model exists and
is of the form
p(m,n) = σ 2mq(n), m ≥ −n, n ≥ 0, (4.1)
with σ the unique root of (3.4) in (0, 1) and q(n) = (q0(n), q1(n),..., qk−1(n))T ,
with { ˆ
qh
(n)}n∈
N0
such that ∞n=0
σ −
2n
ˆq
h(n) <
∞ is the unique (up to a constant )
solution of the equilibrium equations (2.10) – (2.12).
Proof First notice that the modified model is stable whenever the original model
is stable and that p(h,m,n) satisfies (2.10)–(2.12) for all m + n ≥ 0, except for
states (h, 0, 0). Observe that the modified model, restricted to an area of the form
{(m,n) : m ≥ n0 − n, n ≥ 0, n0 = 1, 2, . . .} embarked by a line parallel to the di-
agonal axis, yields the exact same process. Hence, we conclude that for p(m,n) =( p(0,m ,n),..., p(k − 1,m,n))T ,
p(m + 1, n) = αp(m, n), m ≥ −n, n ≥ 0,
and therefore
p(m,n) = αmq(n), m ≥ −n, n ≥ 0. (4.2)
Furthermore, we observe that
∞
n=0
α−n
ˆqh(n)
=
∞
n=0 ˆ
p(h,
−n,n) < 1.
To determine the α we consider levels of the form
(L,h) = (h,m,n) : 2m + n = L
, h = 0, 1, . . . , k − 1

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 9/30
Queueing Syst (2013) 74:273–302 281
and let
pL =
2m+n=L
p(m,n),
with p(m,n) = ( p(0,m,n), p(1,m ,n),..., p(k − 1,m,n))T
. The equilibrium equa-tions between the levels are given by−(kρ + 1)I k + kρLk
pL + kρM
(1,k)k
pL−1 + I k pL+1 = 0, L ≥ 1. (4.3)
Furthermore, Eq. (4.2) yields
pL+1 =
2m+n=L+1
αmq(n) = α
2m+n=L−1
αmq(n) = αpL−1. (4.4)
Substituting (4.4) into (4.3) yields
pL+1 = −ααI k + kρM (1,k)k
−1−(kρ + 1)I k + kρLk
pL. (4.5)
Combining (4.4) and (4.5) immediately yields
det
σ −(kρ + 1)I k + kρLk
+ kρM (1,k)k
+ σ 2I k= 0
with α = σ 2. Furthermore,
det
σ −(kρ + 1)I k + kρLk
+ kρM (1,k)k + σ 2I k
= (−1)k2k σ k−1
σ(kρ + 1 − σ )k − (kρ)k
= 0,
which is exactly equation (3.4).
In Lemma 4.1 we have shown that the equilibrium distribution of the modified
model has a product form solution which is unique up to a positive multiplicative
constant. Returning to the original model, we can immediately assume that the solu-
tion of the equilibrium equations (2.10)–(2.12) is identical to the expression for the
modified model as given in (4.1). Furthermore, Lemma 4.1 implies that this productform is unique, since the equilibrium distribution of the modified model is unique.
Hence, Lemma 4.1 yields the following central result.
Proposition 4.1 For ρ < 1, the equilibrium equations (2.10) – (2.12) have a unique
(up to a constant ) solution of the form
p(m,n) = σ 2mq(n), m, n ≥ 0, (4.6)
with σ the unique root of (3.4) in (0, 1) and q(n) =
(q0
(n),...,qk−1
(n))T non-zero
such that ∞
n=0 σ −2nqh(n) < ∞, h = 0, . . . , k − 1.
The next result shows why the compensation procedure starts with a product form
satisfying the inner and horizontal axis equilibrium equations, and not with one sat-
isfying the inner and vertical axis equilibrium equations.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 10/30
282 Queueing Syst (2013) 74:273–302
Proposition 4.2 For ρ < 1, there is no β , with 0 < |β| < 1, such that the product
form
p(m,n) = βnq(m), m, n ≥ 0, (4.7)
with q(m) = (q0(m ),...,qk−1(m))T non-zero such that ∞m=0 |qh(m)| < ∞, h =
0, . . . , k − 1 is a solution to the equilibrium equations (2.8), (2.9), (2.11), and (2.12).
Proof Setting p(m,n) = βnq(m) in (2.8), (2.9), (2.11), and (2.12) yields two systems
of linear difference equations for q(m). Let Q(y) = (Q0( y ) , . . . , Qk−1(y))T , with
Qh(y) =∞m=0 ymqh(m), |y| < 1. We will show that for every β , with 0 < |β| < 1,
the generating functions Qh(y), h = 0, . . . , k − 1, are zero for all y , with |y| < 1.
More concretely, Eqs. (2.9) and (2.11) yield after some calculations the first of the
two systems of difference equations
H 3(β,y)Q(y) = (1 − βy)I kQ(0), (4.8)
with
H 3(β,y) = −(2kρ + 2 − β)βy + 1I k + 2kρβyLk + 2kρβ2y2M
(1,k)k .
Furthermore, setting p(m,n) = β nq(m) in (2.8) and (2.11) gives the second sys-
tem of linear difference equations for q(m):
H 4(β,y)Q(y) = (2 − βy)I kQ(0) (4.9)
with
H 4(β,y) =H 3(β,y) + I k + 2kρyM (1,k)k .
In light of (4.8) Eq. (4.9) assumes the form
I k +2kρyM
(1,k)k Q(y)
=I kQ(0),
which leads to
Q(y) = I k − 2kρyM
(1,k)k
I kQ(0). (4.10)
Then (4.8) can be written as
H 5(β,y)Q(0) = 0
with
H 5(β,y) = H 3(β,y)
I k − 2kρyM
(1,k)k
− (1 − βy)I k
= βy
β(β − 1 − 2kρ)I k + 2kρβLk + 2kρ
2βy(1 + kρ) − 1M
(1,k)k
− (2kρ)2βyM (2,k)k
.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 11/30
Queueing Syst (2013) 74:273–302 283
Fig. 3 det(D(α,β)) = 0 in R2+for ρ = 1/8 and k = 2
For y = 0,
detH 5(β,y)
= (β + 1)(2kρβ)k
y − 1
β(β + 1)− 1
β + 1
1 + 1 − β
2kρ
k.
Hence, for 0 < |y| < 1 such that y = 1β(β+1)
+ 1β+1
(1 + 1−β2kρ
)k the matrix H 5(β,y)
is invertible, so that Q(0) = 0, which concludes the proof.
The starting solution obtained in Proposition 4.1 satisfies the inner equilibrium
equations as well as the horizontal boundary equations, so we will need to compen-sate for the error created on the vertical boundary. While performing this compensa-
tion the obtained expressions should always satisfy the inner equilibrium equations.
For this reason we present Lemmas 4.2 and 4.3 that are needed to describe the form of
a solution satisfying the inner equilibrium equations. Furthermore, in Proposition 4.1
we have shown that the starting formula has a unique product form representation, but
we still need to specify the form of the vector q(n). This will be done in Lemma 4.4.
Lemma 4.2 The product form p(m,n) = αmβnθ , m ≥ 0, n ≥ 1, is a solution of the
inner equilibrium equation (2.12) if
D(α,β)θ = 0, (4.11)
where D(α,β) = αβC0,0 + αβ2A0,−1 + α2A−1,1 + β2A1,−1.
We should now determine the α’s and β’s with 0 < |α| < 1, 0 < |β| < 1, for which
(4.11) has a non-zero solution θ , or equivalently, for which det(D(α,β)) = 0. Fig-
ure 3 depicts the graph of det(D(α,β)) = 0 in R2+ for ρ = 1/8 and k = 2.
The following lemma provides information about the location and the number of
zeros of det(D(α,β)).
Lemma 4.3 (i) For every α, with |α| ∈ (0, 1), the equation det(D(α,β)) = 0 assumes
the form 2(kρ + 1)β − β2 − α
kα − (2kρ)k βk+1 = 0 (4.12)

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 12/30
284 Queueing Syst (2013) 74:273–302
and has exactly k simple roots in the β-plane with 0 < |β| < |α|. (ii) For every β ,
with |β| ∈ (0, 1), Eq. (4.12) has exactly one root in the α-plane with 0 < |α| < |β|.
Proof (i) Equation (4.12) is a polynomial in β of degree 2k and we will show that
only k roots are inside the open circle of radius |α|. Other possible roots inside theopen unit circle appear not to be useful, since they will produce a divergent solution,
as we have proved in Proposition 4.1. We divide both sides of Eq. (4.12) by αk+1 and
set z = β/α , which gives
f k1 (z) − (2kρ)k zk+1 = 0 (4.13)
with f 1(z) = 2(kρ + 1)z − αz2 − 1. Then, f 1(z) has two roots:
z
± =
kρ + 1 ±
(kρ + 1)2 − α
α
.
Observe that, for 0 < ρ < 1,
|z−| = 1
kρ + 1
1
|1 +
1 − α(kρ+1)2 |
<1
kρ + 1
1
1 +
1 − |α|(kρ+1)2
< 1,
and |z+| > 1. Furthermore, for |z| = 1,
f k1 (z)= 2(kρ + 1)z − αz2 − 1k ≥ 2(kρ + 1)|z| − |α||z|2 − 1
k
= 2kρ + 1 − |α|k
> (2kρ)k.
Hence, by Rouché’s theorem f k1 (z) − (2kρ)k zk+1 has exactly k roots inside the open
unit circle, so we have proven that (4.12) has for each fixed |α| ∈ (0, 1) exactly k
roots inside |β| = |α|. Denote these roots by β1, β2, . . . , βk . We next show that the
roots are distinct. To this end, for a root of g1(z) = f k1 (z) − (2kρ)k zk+1 in (4.13) to
be of (at least) multiplicity two, it must be that g1(z) = g1(z) = 0, which gives
α(k
−1)z2
+2(kρ
+1)z
−(k
+1)
= 0. (4.14)
Equation (4.14) has two solutions
z± = −(kρ + 1) ±
(kρ + 1)2 + α(k2 − 1)
α(k − 1),
with |z−| > |α| and hence β = z+. By (4.14) we get αβ2 = (−2(kρ + 1)β + k +1)/(k − 1), so that Eq. (4.13) can be written as
(k − 1)k ρkβ = (kρ + 1)β − 1
β
k
. (4.15)
We will show that setting β = z+ and solving (4.15) in terms of α will produce α
solutions that exceed the starting solution σ 2, where σ is defined as the unique root
of (3.4) in (0, 1), leading to a contradiction.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 13/30
Queueing Syst (2013) 74:273–302 285
Define u =
1 + α k2−1(kρ+1)2 . Then either u ∈R+ or u ∈C \R. Equivalently
α = u2 − 1
k2
−1
(kρ + 1)2 and β = 1
kρ
+1
k + 1
1
+u
.
Using the form of β in (4.15) we obtain after some calculations
h(u) = (u − k)k (u + 1) − (−1)k ρk (k + 1)k+1(k − 1)k
(kρ + 1)k+1 = 0. (4.16)
We consider two cases: k = 2 and k ≥ 3. First, we treat the case k ≥ 3. Using the
intermediate value theorem the function (4.16) can be easily seen to have at least
one real root in the interval [−√
2, 0], since h(0)h(−√
2) < 0. This root is the only
real root of h(u) in the interval [−√
2,
√ 2]. Assume that there is a second root in theinterval [−√ 2, 0]. Then by Rolle’s theorem the derivative h(u) = (k +1)(u−k)k−1u
should have a real root in the corresponding open interval, which is not the case.
Furthermore, the derivative h(u) = (k + 1)(u − k)k−1u maintains sign throughout
the interval [0,√
2] and since h(0)h(√
2) > 0 there are no real roots in the interval
[0,√
2]. If we assume that there is one complex root, with |u| <√
2, then there should
be in total at least three roots (the real root, the complex one and its conjugate) inside
the circle of radius√
2, which would mean that there are at least two roots of the
derivative h(u) = (k + 1)(u − k)k−1u inside the circle of radius√
2/ sin( π2(k−1)
) (see
e.g. [11]). However, one can check that h(u) has only the zero root is inside the circlesince for the other root u = k one can verify that k > √ 2/ sin( π2(k−1)
) for k ≥ 3.
Hence, there is only one root in the circle of radius√
2, and this root is a real
negative number. All other roots in the u-plane will produce α-values greater than
σ 2, since
|α| = (kρ + 1)2 |u2 − 1|k2 − 1
≥ (kρ + 1)2 1
k2 − 1> ρ2 > σ 2, k ≥ 3.
Repeating a similar analysis for k
= 2, we prove that the function h(u) in (4.16) has
exactly one real negative root in the open circle of radius √ 7/2. The other two roots
in the u-plane will produce α-values greater than σ 2, since
|α| = (2ρ + 1)2 |u2 − 1|3
≥ (2ρ + 1)2 1
4> ρ2 > σ 2.
(ii) Equation (4.12) is a polynomial in α of degree k + 1 and we will prove that
there is only one root inside the circle of radius |β|. Dividing both sides of (4.12) by
βk+1 and setting x = α/β gives
f 2(x) − (2kρ)k = 0 (4.17)
with f 2(x) = x (2kρ + 2 − β − x)k . Then f 2(x) has a zero root of multiplicity one
and a root 2kρ + 2 − β of multiplicity k larger than the radius 3/4. Furthermore, for
|x| = 1, we have |f 2(x)| ≥ |x|(2kρ + 2 − |β| − |x|)k = (2kρ + 1 − |β|)k > (2kρ)k ,

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 14/30
286 Queueing Syst (2013) 74:273–302
hence by Rouché’s theorem f 2(x) − (2kρ)k has exactly one root in |x| < 1. This
proves that for each fixed |β| ∈ (0, 1), Eq. (4.12) has exactly one root in |α| < |β|.
Lemmas 4.2 and 4.3 characterize basic solutions satisfying the inner condition
(2.12). In Lemma 4.4 we present the starting solution of the compensation approach.The starting solution was proven in Proposition 4.1 to have a unique product form
representation (up to a positive constant) and in Lemma 4.4 we will specify the form
of the vector q(n) appearing in (4.6).
Lemma 4.4 For |α| ∈ (0, 1) let β1, β2, . . . , βk be the roots of (4.12) with |β| < |α|,and let θ 1, θ 2, . . . , θ k be the corresponding non-zero vectors satisfying (4.11). Then
there exists exactly one α with 0 < |α| < 1 for which there are a non-zero vector ξ
and coefficients d 1, d 2, . . . , d k such that
p(m,n) =
αm
ki=1 d i βn
i θ i , m ≥ 0, n ≥ 1,
αmξ , m ≥ 0, n = 0,(4.18)
satisfies (2.10) – (2.12). This α is the square of the unique solution of Eq. (3.4) inside
the open unit circle.
The eigenvector θ = (θ (1), θ (2), . . . , θ (k) )T satisfies
θ (i)
θ (k) =
2(kρ + 1)β − β2 − α
2kρβ
k−i
, i = 1, 2, . . . , k − 1. (4.19)
The vector ξ is given by
ξ = − 1
αC −1
0,0 [A0,−1α +A1,−1]k
i=1
d i βiθ i (4.20)
and the coefficients d 1, d 2, . . . , d k satisfy
k
j =1
K(α,βj )d j
= 0 (4.21)
with K(α,βj ) = (K1(α,βj ) , . . . , Kk (α,βj ))T , where
K1(α,βj ) = βj
α
β2j + α
kρ
kρ + 1
k
+ α
2(kρ + 1)
2(kρ + 1)βj − 2α
2(kρ + 1)βj − β2j − α
+ αβj
β2j + α
θ
(k)j , (4.22)
Ki (α,βj ) = βj
β2j + α
2α
kρ
kρ + 1
i
+ β2
j − α 2kρβj
2(kρ + 1)βj − β2j − α
i
θ (k)j ,
(4.23)
for i = 2, . . . , k, j = 1, . . . , k.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 15/30
Queueing Syst (2013) 74:273–302 287
Proof Substituting the expression for p(m,n) in (4.18) into (2.10) immediately
yields (4.20). Then, from (2.11), we obtain
k
i=1
d i βiC0,0α
+A0,
−1αβi
+A1,
−1βi
− [2A−1,1α +A0,1]C −10,0 [A0,−1α +A1,−1]
θ i = 0.
After tedious calculations the above matrix expression can be simplified to expression
(4.21).
Remark 4.1 The rank of the matrix K = [K(α,β1) . . .K(α,βk )] in (4.21) is equal to
k − 1. This can be proven as follows. First notice that rank (K) < k, since the equi-
librium distribution of the modified model is non-zero under the stability condition
ρ < 1. Further, if rank (K) < k − 1, then there exist at least two linearly independentsolutions d 1 and d 2, hence there would be at least two linearly independent vectors
q1(m) and q2(m) satisfying (4.1). This contradicts the uniqueness of the equilibrium
distribution of the modified model.
The starting formula in the upper plane is a linear combination of k terms, as
seen in equation (4.18). One can easily check that these terms do not satisfy the
vertical boundary. Let us consider a term d αmβnθ (with |β| < |α|) and show how to
compensate for the error of this term on the vertical boundary. The idea behind the
compensation approach is to add a new term cαm
βn
θ , such that d αm
βn
θ + cαm
βn
θ satisfies both (2.9) and (2.12). Substituting this linear combination into (2.9) yields a
set of k equations of the form
dβn−1H (α,β)θ + c βn−1H (α, β)θ = 0, n > 1,
where H (x,y) = yB0,0 + y2A1,0 + xA0,−1. Hence, β = β , and therefore α can be
obtained from (4.12) and θ is the corresponding non-zero solution of (4.11), only
leaving c for meeting k requirements. Thus the choice of dαmβnθ + cαm βnθ for
m, n
≥ 0 does not provide enough freedom to satisfy the boundary equations. Re-
markably, the constant c, as we will prove in Lemma 4.5, is very close to our initial
approach of simply adding the term cαmβnθ .
We shall next describe the compensation on the vertical boundary.
Lemma 4.5 For |β| ∈ (0, 1) let α, α be roots of (4.12) with |α| < |β| < |α|, and
let θ , θ be the corresponding non-zero vectors satisfying (4.11). Then there exists a
coefficient c such that
p(m,n)= dαmβnθ + cαmβnθ , m > 0, n ≥ 0,
d αα−β βnθ + c αα−β βnθ , m = 0, n ≥ 0,(4.24)
satisfy both (2.9) and (2.12). The coefficient c is given by
c = d β − αα − β
θ (k)
θ (k). (4.25)

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 16/30
288 Queueing Syst (2013) 74:273–302
The eigenvector θ is given in (4.19) and θ = (θ (1), θ (2), . . . , θ (k))T satisfies
θ (i)
θ (k)=
2(kρ + 1)β − β2 − α2kρβ
k−i
, i = 1, 2, . . . , k − 1. (4.26)
Proof We observe that the equilibrium equations (2.4)–(2.6) for m = 1 demand that
the equilibrium distribution p(k − 1, 0, n), for n ≥ 1, is of the same geometric form
as p(h,m,n), m ≥ 1. Hence, we need only to assume that
p(k − 1, 0, n) = dθ (k) + cθ (k)
βn. (4.27)
We will determine p(0, n) iteratively through (2.3). Because of the form of Eq. (2.3)
we can assume that
p(h, 0, n) = dph+1θ
(h
+1)
+ c ph+1 θ (h
+1)
βn
, h = 0, . . . , k − 1. (4.28)
Then plugging Eq. (4.28) into Eq. (2.3) for h = 1, 2, . . . , k − 1 and using (4.19) we
find that the sequences ph+1 and ph+1 satisfy the recursive schemes ph = η(ph+1)
and ph = η( ph+1), for h = 0, 1, . . . , k − 1 and
η(x) = (2kρ + 1)βx − β2x − α
2(kρ + 1)β − β2 − α, η(x) = (2kρ + 1)βx − β2x − α
2(kρ + 1)β − β2 − αwith initial conditions pk
= ˆpk
= 1. Solving these linear difference equations gives
for h = 0, . . . , k − 1
p(h, 0, n)
βn = d
α − β( (2kρ+1)β−β2
2(kρ+1)β−β2−α)k−h−1
α − βθ (h+1)
+ cα − β(
(2kρ+1)β−β2
2(kρ+1)β−β2−α)k−h−1
α − βθ (h+1). (4.29)
Equation (2.3) for h = 0 yields
c = −d (2kρ + 1)βp1 − β2p1 − α
(2kρ + 1)β p1 − β2p1 − αθ (1)
θ (1).
Using the recursive scheme for the sequences ph+1 and ph+1 and (4.29) gives
c = −d p0
p0
2(kρ + 1)β − β2 − α
2(kρ + 1)β − β2 − αθ (1)
θ (1).
Using (4.12) and (4.19) gives
c = d β − αα − β
θ (k)
θ (k).
In light of Eq. (4.25) Eq. (4.29) can be simplified, after eliminating the common
terms, to (4.24).

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 17/30
Queueing Syst (2013) 74:273–302 289
Compensation on the vertical boundary has created an error and one can check
that the new formula does not satisfy the horizontal boundary. Let us consider the
term cαmβnθ (with |α| < |β|) and show how to compensate for the error of this
term on the horizontal boundary. We will add a new term
ˇαmk
i
=1 d i βnθ , such that
cαmβnθ + αm
ki=1 d i βnθ satisfies (2.10)–(2.12). Substituting this linear combina-tion into (2.10) and (2.11) yields a set of k equations of the form
cαm−1βG(α,β)θ + αm−1k
i=1
d i βiG(α, βi )θ i = 0, m > 1,
where G(x,y) = xC0,0 + xyA0,−1 + yA1,−1 − [2xA−1,1 + A0,1]C −10,0 [xA0,−1 +
A1,−1]. Hence, α = α, and therefore β1, . . . , βk can be obtained from (4.12) and
θ 1, . . . , θ k are the corresponding non-zero solutions of (4.11), only leaving d 1, . . . , d kto be calculated from the set of the k equations.
The next result presents the compensation on the horizontal boundary.
Lemma 4.6 For |α| ∈ (0, 1) let β, β1, β2, . . . , βk be the roots of (4.12) with | βi | <
|α| < |β|, i = 1, . . . , k, and let θ , θ 1, θ 2, . . . , θ k be the corresponding non-zero
vectors satisfying (4.11). Then there exist a non-zero vector ξ and coefficients
d 1, d 2, . . . , d k such that
p(m,n) = cα
m
βn
θ + αmk
i=1 d i βi
n
θ i , m ≥ 0, n ≥ 1,αmξ + αmξ , m ≥ 0, n = 0,
(4.30)
satisfy (2.10) – (2.12). The eigenvector θ is given in (4.26) and θ = (θ (1), θ (2), . . . ,
θ (k) )T satisfies
θ (i)
θ (k)=
2(kρ + 1) β − β2 − α2kρ β
k−i
, i = 1, 2, . . . , k − 1. (4.31)
The vector ξ is given by
ξ = −ξ − 1
αC −1
0,0 [A0,−1α +A1,−1]
cβ θ +k
i=1
d i βi θ i
, (4.32)
where ξ is given in (4.20). The coefficients d 1, d 2, . . . , d k satisfy
k
j =1
K(ˆα,
ˆβj )
ˆd j
= −cK(
ˆα,β), (4.33)
with K(α,β) = (K1(α,β),...,Kk (α,β))T defined in (4.22) and (4.23).
Proof The proof is identical to the proof of Lemma 4.4.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 18/30
290 Queueing Syst (2013) 74:273–302
Repeating the compensation procedure by adding terms so as to compensate al-
ternately for the error on the boundary m = 0 according to Lemma 4.5, and on the
boundary n = 0 according to Lemma 4.6, will generate a sequence of terms. These
sequences of compensation terms grow as a k-ary tree and the problem is to prove
that they converge. First, we will describe the compensation procedure in more de-tail, then we will formally define the final expression in terms of infinite series and
afterwards prove the convergence of the series.
5 Description of the compensation approach
The compensation approach will lead to an expression for p(m,n) in terms of an infi-
nite series of product forms. We next describe how the product forms can be obtained
in an iterative fashion.
H 0: Start with α0,1, the unique root of Eq. (3.4) inside the open unit circle, and calcu-
late the k β’s from Lemma 4.3, denoted by β0,1, β0,2, . . . , β0,k . The correspond-
ing non-zero θ vectors and the coefficients d from Lemma 4.2 are denoted by
θ 0,1, θ 0,2, . . . , θ 0,k and d 0,1, d 0,2, . . . , d 0,k , respectively. This gives the product
form α m0,1
kj =1 d 0,j β
n0,j θ 0,j .
V 0: For β0,j , j = 1, 2, . . . , k, calculate the α’s from Lemma 4.3, denoted by α1,j .
The corresponding non-zero θ vectors and the coefficients c from Lemma
4.5 are denoted by θ 1,j and c0,j , respectively. This gives the product formkj =1 c0,j α
m1,j
βn0,j θ 1,j .
H 1: For α1,i , i = 1, 2, . . . , k, obtained in the previous step, calculate the k β’s
from Lemma 4.3, denoted by β1,ki−j , j = 0, . . . , k − 1. The correspond-
ing non-zero θ vectors and the coefficients d from Lemma 4.6 are de-
noted by θ 1,ki−j and d 1,ki−j , respectively. This gives the product formk2
i=1 αm1,i
k−1j =0 d 1,ki−j β
n1,ki−j θ 1,ki−j .
V 1: For β1,j , j = 1, 2, . . . , k2, calculate the α’s from Lemma 4.3, denoted by α2,j .
The corresponding non-zero θ vectors and the coefficients c from Lemma4.5 are denoted by θ 2,j and c1,j , respectively. This gives the product formk2
j =1 c1,j αm2,j
βn1,j θ 2,j .
A general step of this process is described as follows:
H : For α,i , i = 1, 2, . . . , k, calculate the k β’s from Lemma 4.3, denoted by
β,ki−j , j = 0, . . . , k − 1. The corresponding non-zero θ vectors and the co-
efficients d from Lemma 4.6 are denoted by θ ,ki−j and d ,ki−j , respectively.
This gives the product formk
i=1 α
m
,ik
−1
j =0 d ,ki−j β
n
,ki−j θ ,ki−j .V : For β,j , j = 1, 2, . . . , k+1, calculate the α from Lemma 4.3, denoted by
α+1,j . The corresponding non-zero θ vectors and the coefficients c from
Lemma 4.5 are denoted by θ +1,j and c,j . This gives the product formk+1
j =1 c,j αm+1,j
βn,j θ +1,j .

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 19/30
Queueing Syst (2013) 74:273–302 291
Fig. 4 Tree structure of α’s and β ’s for k = 2
Continuing the above procedure leads to all pairs of α, β for which the correspond-
ing vectors θ , θ and the coefficients d , d , c are all the basic solutions for constructing
a formal expression for the equilibrium probability vectors p(m,n). The tree struc-
ture of consecutive α’s and β ’s is illustrated in Fig. 4.
The compensation approach eventually leads to the following expression for the
equilibrium distribution:
Theorem 5.1 For all states (h, m, n), h = 0, 1, . . . , k − 1,
p(m,n) ∝∞
=0
ki=1
αm,i
k−1j =0
d ,ki−j βn,ki−j θ ,ki−j
+
∞=0
k+1
i=1
c,iα
m
+1,i β
n
,i θ +1,i , m > 0, n > 0, (5.1)
p(m, 0) ∝∞
=0
ki=1
αm,iξ ,i , m > 0, (5.2)
p(0, n) ∝∞
=0
ki=1
k−1j =0
α,i
β,ki−j − α,i
d ,ki−j βn,ki−j θ ,ki−j
+ ∞=0
k+
1i=1
α+1,i
β,i − α+1,i
c,iβn,i θ +1,i , n > 0, (5.3)
p(0, 0) ∝ 1
2kρT kp(0, 1), (5.4)

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 20/30
292 Queueing Syst (2013) 74:273–302
where T k denotes a k × k lower triangular matrix , with elements (i, j),i ≥ j, j =1, . . . , k, equal to one and zeros elsewhere.
There remains the task of proving that these formal expressions are in fact abso-
lutely convergent. However, before doing so we need several preliminary results. Theanalysis that will follow is similar to the analysis performed in [3]. First, we analyze
the limiting behavior of the sequences {α,i}∈N0,i=1,...,k and {β,i}∈N0,i=1,...,k+1
and the corresponding sequences of coefficients. The following proposition provides
geometric bounds for the α’s and β ’s.
Proposition 5.1 The {α,i}∈N0,i=1,...,k and {β,i}∈N0,i=1,...,k+1 appearing in
(5.1) – (5.4) satisfy the properties
(i) 1 ≥ |
α0,1|
> max{|
β0,1|
, . . . ,|β
0,k|} > max
{|α
1,1|, . . . ,
|α
1,k|} > max
{|β
1,1|, . . . ,
|β1,k2 |} > · · · .
(ii) 0 ≤ max{|α,1|, . . . , |α,k |} ≤ ( 38
) and 0 ≤ max{|β,1|, . . . , |β,k+1 |} ≤ 12
( 38
).
Proof (i) Remember that α0,1 is the unique root of equation (3.4) inside the open unit
circle, hence |α0,1| ≤ 1, for all ρ ∈ (0, 1). Then, β0,1, . . . , β0,k follow from (4.12) and
according to Lemma 4.3 max{|β0,1|, . . . , |β0,k|} < |α0,1|, so that assertion (i) follows
upon repeating this argument.
(ii) We only need to prove that for each α, with |α| < 1, we obtain k β’s with
|β| < |α|/2 and that for each β , with |β| < 1, we obtain one α with |α| < 3|β|/4.These two proofs are almost identical to the proofs of Lemma 4.3 and for this reason
we omit them (see Appendix).
It follows from Proposition 5.1 that the sequences of {α,i} and {β,i} tend to
zero as tends to infinity. The limiting behavior of the sequences of α’s and β’s is
presented in Lemma 5.1 and the limiting behavior of the coefficients is treated in
Lemma 5.2.
Lemma 5.1
(i) Let α, β and α be roots of Eq. (4.12) with 1 > |α| > |β| > |α|. Then, as α → 0,
β/α → w, with |w| < 1, and α/β → 1/ w, with | w| > 1, and both w and w are
roots of 2(kρ + 1)w − 1
k = (2kρ)k wk+1. (5.5)
(ii) Let β, α and β be roots of Eq. (4.12) with 1 > |β| > |α| > | β|. Then, as β → 0,
β/α → w, with |w| < 1, and α/β → 1/ w, with | w| > 1, and both w and w are
roots of (5.5).
Corollary 5.1 Equation (5.5) has k roots inside the open unit circle, denoted by
w1, . . . , wk , and a real root outside denoted by wk+1. Furthermore,
(i) w1, . . . , wk are distinct and |wi | < 1/2 for i = 1, . . . , k.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 21/30
Queueing Syst (2013) 74:273–302 293
(ii) For wk+1 there is a lower bound
1
2
1 + 1
kρ
k
< wk+1. (5.6)
Proof We rewrite (5.5) as
f k3 (w) − (2kρ)k wk+1 = 0 (5.7)
with f 3(w) = 2(kρ + 1)w − 1, and we observe that f 3(w) has a single root w =1
2(kρ+1) < 1
2. Furthermore, for |w| = 1 we have |f 3(w)|k ≥ |2(kρ + 1)|w| − 1|k =
(2kρ + 1)k > (2kρ)k , hence by Rouché’s theorem f k3 (w) − (2kρ)k wk+1 has exactly
k roots in |w| < 1 and one root in |w| ≥ 1. The root outside the open unit circle can
be easily verified to be a real root by applying the intermediate value theorem on theinterval [1, ∞).
(i) Again using Rouché’s theorem on |w| = 12
leads to the stricter bound for the
roots inside the open unit circle as stated in assertion (ii). For a root of g3(w) =f k3 (w) − (2kρ)kwk+1 to be of (at least) multiplicity two, it must be that g3(w) =g
3(w) = 0, which gives w = 12
k+1kρ+1
> 12
. Hence all roots w1, . . . , wk inside the open
circle are distinct.
(ii) Proving that wk+1 > 12
(1 + 1kρ
)k is equivalent with showing that inside the cir-
cle of radius |w| = 12
(1 + 1kρ
)k the polynomial f k3 (w) − (2kρ)kwk+1 = 0 has exactly
k roots. This proof is identical to the proof that the polynomial has k roots inside theopen unit circle and is for this reason omitted.
Lemma 5.2
(i) Let α and β1, . . . , βk be roots of Eq. (4.12) for fixed α, with 1 > |α| >
max{|β1|, . . . , |βk|}. Then, as α → 0,
(a) The vector θ i = (θ (1)i , . . . , θ
(k)i )T converges to
θ (h)
iθ
(k)i
→ 2(kρ +
1)wi −
1
2kρwi
k
−h
, h = 1, 2, . . . , k − 1,
where w1, . . . , wk are the roots of (5.5) inside the open unit circle.
(b) The system (4.21) for determining the coefficients d 1, . . . , d k reduces to
kj =1
θ j d j = 0
and can be explicitly solved as
d j
d k= −
k−1i=1i =j
wi − wk
wi − wj
, j = 1, . . . , k − 1.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 22/30
294 Queueing Syst (2013) 74:273–302
(c) The vector ξ converges to
ξ → −C −10,0 A1,−1
k
j =
1
d j wj θ j .
(ii) Let βi and α be roots of Eq. (4.12) for fixed βi , with 1 > |βi | > |α|, i = 1, . . . , k.
Then, as βi → 0, we have the following.
(a) The vector θ = (θ (1), . . . , θ (k) )T converges to
θ (h)
θ (k)→
2(kρ + 1)wk+1 − 1
2kρwk+1
k−h
, h = 1, 2, . . . , k − 1,
where wk+1 is the root of (5.5) outside the open unit circle.
(b) The ratio c/d i converges to
c/d i → wi
wk+1
wk+1 − 1
1 − wi
θ (k)i
θ (k)i
.
(c) The system (4.33) for determining the coefficients d 1, . . . , d k reduces to
k
j =1
θ j d j = −cθ
and can be explicitly solved as
d j = d j
d k
d k + c
k−1i=1i =j
wi − wk+1
wi − wk
, j = 1, . . . , k − 1.
(d) The vector ξ converges to
ξ → −C −10,0 A1,−1
cwk+1θ +
kj =1
(d j − d j )wj θ j
.
Lemmas 5.1 and 5.2 provide the ingredients to prove the absolute convergence of
the series appearing in Theorem 5.1.
Theorem 5.2 There exists a positive integer N such that :
(i) The series∞=0
k
i=1 αm,ik
−1
j =0 d ,ki−j βn,ki−j θ
(h),ki−j and
∞=0k
+1
i=1 c,i ×αm
+1,i βn,i θ
(h)+1,i , the sum of which defines p(h,m,n) for m , n > 0, both converge
absolutely for all m > 0 and n > 0 with m + n > N .
(ii) The series∞
=0
k
i=1 αm,iξ
(h),i , which defines p(h,m, 0) for m > 0, converges
absolutely for all m ≥ N .

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 23/30
Queueing Syst (2013) 74:273–302 295
(iii) The series
∞
=0
k
i=1
k−1
j
=0
α,i
β,ki−j − α,i
d ,ki−j βn,ki−j θ
(h),ki−j
and
∞=0
k+1i=1
α+1,i
β,i − α+1,i
c,i βn,i
θ (h)+1,i
,
the sum of which defines p(h, 0, n) for n > 0, both converge absolutely for all
n > N .
(iv) The series
m+n>N
∞=0
ki=1
αm,i
k−1j =0
d ,ki−j βn,ki−j θ
(h),ki−j
+k+1i=1
c,i αm+1,i βn
,i θ
(h)+1,i
+
m>N
∞=0
ki=1
αm,i ξ
(h),i
+ n>N
∞
=0
k
i=1
k−1
j =0
α,i
β,ki−j −
α,i
d ,ki−j βn,ki
−j θ
(h),ki
−j
+k+1i=1
α+1,i
β,i − α+1,i
c,i βn,i
θ (h)+1,i
,
which defines
m+n>N p(h,m,n), converges absolutely.
Proof For m ≥ 1 and n ≥ 1 the series that define p(h,m,n) converge absolutely if
and only if
∞=0
ki=1
|α,i |mk−1j =0
|d ,ki−j ||β,ki−j |nθ
(h),ki−j
< ∞
and
∞=0
k+1i=1
|c,i ||α+1,i |m|β,i |nθ
(h)+1,i
< ∞.
Consider now a fixed m ≥ 1 and n ≥ 1. Then, define the ratio of two consecutiveterms
R()r,v (m,n) =
|α+1,j |m|d +1,k(j −1)+v ||β+1,k(j −1)+v |n|θ (h)+1,k(j −1)+v
||α,i |m|d ,k(i−1)+r ||β,k(i−1)+r |n|θ
(h),k(i−1)+r
|

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 24/30

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 25/30
Queueing Syst (2013) 74:273–302 297
p(m,n) = C−1∞
=0
ki=1
αm,i
k−1j =0
d ,ki−j βn,ki−j θ ,ki−j
+ C−1 ∞=0
k+1i=1
c,iαm+1,i βn
,i θ +1,i , m > 0, n > 0, (5.10)
p(m, 0) = C−1∞
=0
ki=1
αm,iξ ,i , m > 0, (5.11)
p(0, n) = C−1∞
=0
ki=1
k−1j =0
α,i
β,ki−j − α,i
d ,ki−j βn,ki−j θ ,ki−j
+ C−1∞
=0
k+1i=1
α+1,i
β,i − α+1,i
c,i βn,i θ +1,i , n > 0, (5.12)
p(0, 0) = C−1 1
2kρT kp(0, 1), (5.13)
where C is the normalizing constant and T k denotes a k × k lower triangular matrix ,
with elements (i, j),i ≥ j, j = 1, . . . , k, equal to one and zeros elsewhere.
Proof Define L(N ) to be the set of states (m, n) with m + n > N including state
(m,n) = (N , 0). Then L(N ) is the set on which the series of Theorem 5.1 converge
absolutely. The restricted stochastic process on the set L(N ) with transition rates given
in Fig. 5 is an irreducible Markov process, whose associated equilibrium equations
are identical to the equations of the original unrestricted process on the set L(N ), ex-
cept for the equation of state (N , 0). Hence, the process restricted to L(N ) is ergodic
so that the series of Theorem 5.1 can be normalized to produce the equilibrium distri-
bution of the restricted process on L(N ). Since the set H
×N0
×N0
\L(N ) is finite, it
follows that the original process is ergodic and relating appropriately the equilibriumprobabilities of the unrestricted and restricted process completes the proof.
Rearranging the terms appearing in the series (5.10) yields
p(m,n) = C−1∞
=0
ki=1
k−1j =0
d ,ki−j α
m,iθ ,ki−j + c,ki−j α
m+1,ki−j θ .ki−j
βn
,ki−j
= C−1αm0,1
kj =1
d 0,j βn0,j θ 0,j
+ C−1∞
=1
ki=1
αm,i
c−1,i βn
−1,i θ ,i +k−1j =0
d ,ki−j βn,ki−j θ ,ki−j
.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 26/30
298 Queueing Syst (2013) 74:273–302
Fig. 5 L(3) transition rate diagram with H = {0, 1, . . . , k − 1}
In the next theorem we will take advantage of the exact expression for p(m,n) and
show that this series yields an asymptotic expansion. These results refine and extend
the result of Proposition 3.1.
Theorem 5.4 For all r ≥ 1, as m + n → ∞ and n ≥ 1,
p(h,m,n) = C−1r−1=0
ki=1
k−1j =0
d ,ki−j α
m,i θ
(h),ki−j
+ c,ki−j αm+1,ki−j
θ (h).ki−j
βn
,ki−j
+
kr
i=1
k−1
j =0
Od r,ki
−j α
mr,iβn
r,ki
−j θ
(h)r,ki
−j
+ O
cr,ki−j αmr+1,ki−j β
nr,ki−j
θ (h)r,ki−j
. (5.14)
For all r ≥ 1, as m → ∞,

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 27/30

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 28/30
300 Queueing Syst (2013) 74:273–302
with Rv,j (m,n) the (v,j ) element of matrix (R(m,n)), R
v,j (m,n) the (v,j ) ele-
ment of matrix ( R(m,n)) and
M =
∞=0
kj =1
kv=1
R
v,j (m, n) + ˆR
v,j (m,n)
.
For the second asymptotic result, we observe that, for m > N ,
P
min(Q1, Q2) = m=
k−1h=0
∞n=0
p(h,m,n) = C−1k−1h=0
∞n=0
∞=0
x(h) (m,n).
The rest of the proof is identical to the proof of the first asymptotic result.
Furthermore, it readily follows from the definition of x(h) (m,n) and Proposi-tion 5.1 that, as m + n → ∞ and n ≥ 1,
x(h)+1(m,n) = o
x
(h) (m,n)
, ≥ 0,
so that the infinite series (5.16) constitutes an asymptotic expansion in the sense that
each term is a refinement of the previous one.
6 Conclusions
We have studied the symmetric shorter-queue problem with Erlang arrivals and have
proved that the equilibrium distribution of the queue lengths can be represented by an
infinite series of product forms. In order to establish this result we have used a gen-
eralization of the compensation approach. These analytical results offer numerically
efficient algorithms, mainly due to the exponential convergence of the series.
This paper has demonstrated that the compensation approach can work for three-
dimensional Markov chains, whose state space consists of a k -layered quarter plane.
We believe that the same approach can be used to obtain the equilibrium distribution
in the case of phase-type arrivals, and even for the more general Markovian arrivalprocess (MAP).
Appendix
In what follows we will assume that the α’s are in absolute value smaller than or equal
to the starting solution σ 2, with σ the unique root of Eq. (3.4) in (0, 1). However, for
0 < ρ < 1 one can easily verify that σ < ρ, so we will assume that |α| < ρ2.
Lemma 7.1 For ρ < 1 and for every α, with |α| ∈ (0, ρ2), the equationdet(D(α,β)) = 0 assumes the form
2(kρ + 1)β − β2 − αk
α − (2kρ)k βk+1 = 0, (7.1)
and has exactly k simple roots in the β -plane with 0 < |β| < |α|/2.

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 29/30
Queueing Syst (2013) 74:273–302 301
Proof Equation (7.1) is a polynomial in β of degree 2k and we will show that exactly
k roots are inside the open circle of radius |α|/2. We divide both sides of Eq. (7.1) by
αk+1 and set z = β/α which gives
f
k
1 (z) − (2kρ)
k
z
k
+1
= 0 (7.2)
with f 1(z) = 2(kρ + 1)z − αz2 − 1. Then f 1(z) has two roots:
z± = kρ + 1 ±
(kρ + 1)2 − α
α.
For 0 < ρ < 1, we observe that z+ is located outside the open unit circle, while
|z−| =
kρ + 1
|α| 1 − 1 − α
(kρ + 1)2=
1
kρ + 1
1
|1 + 1 − α
(kρ+1)2 |
<1
kρ + 1
1
1 +
1 − |α|(kρ+1)2
<1
2.
Furthermore, for |z| = 1/2,
f k1 (z)
=2(kρ + 1)z − αz2 − 1
k ≥
2(kρ + 1)|z| − |α||z|2 − 1
k
=
2kρ − |α|2
k
1
2
k
>
2kρ − ρ2
2
k
1
2
k
=
1 − ρ
4k
k
(kρ)k >
1 − 1
8
2
(kρ)k
> (2kρ)k
1
2
k+1
=g1(z) − f k1 (z)
.
Hence, by Rouché’s theorem f
k
1 (z)−(2kρ)
k
z
k
+1
has exactly k roots inside |z| = 1/2,which completes the proof.
According to Lemma 7.1 all β roots are located in the open circle with radius
ρ2/2, so we assume that |β| < ρ2/2.
Lemma 7.2 For ρ < 1 and for every β , with |β| ∈ (0, ρ2/2), the equation
det(D(α,β)) = 0 assumes the form
2(kρ +
1)β −
β2
−αk
α −
(2kρ)k βk
+1
= 0, (7.3)
and has exactly one root in the α-plane with 0 < |α| < 3|β|/4.
Proof Equation (7.3) is a polynomial in α of degree k + 1 and we will show that
there is only one root inside the open circle of radius 3|α|/4. We divide both sides of

8/13/2019 Erlang Arrivals Joining the Shorter Queue - Article
http://slidepdf.com/reader/full/erlang-arrivals-joining-the-shorter-queue-article 30/30
302 Queueing Syst (2013) 74:273–302
Eq. (7.3) by β k+1 and set x = α/β , which gives
f 2(x) − (2kρ)k = 0 (7.4)
with f 2(x) = x(2kρ + 2 − β − x)
k
. Then f 2(x) has the zero root of multiplicity oneand the root 2kρ + 2 − β of multiplicity k larger than the radius 3/4. Furthermore,
for |x| = 3/4,
f 2(x)= x(2kρ + 2 − β − x)k
≥ 3
4
2kρ + 2 − |β| − 3
4
k
= 3
4
2kρ + 5
4− |β|
k
= 3
4(2kρ)k
1 + 5
8kρ− |β|
2kρ
k
> 34
(2kρ)k
1 + 58kρ
− ρ4k
k
> (2kρ)k 34
1 + 5
16− 1
8
2
> (2kρ)k.
Hence, by Rouché’s theorem f 2(x) − (2kρ)k has exactly one root in |x| < 3/4, which
completes the proof.
References
1. Adan, I.J.B.F.: A compensation approach for queueing problems. PhD dissertation, Technische Uni-
versiteit Eindhoven, Eindhoven (1991)
2. Adan, I.J.B.F., Wessels, J., Zijm, W.H.M.: Analysis of the symmetric shortest queue problem. Com-
mun. Stat., Stoch. Models 6(4), 691–713 (1990)
3. Adan, I.J.B.F., Wessels, J., Zijm, W.H.M.: Analysis of the asymmetric shortest queue problem. Queue-
ing Syst. 9(1), 1–58 (1991)
4. Adan, I.J.B.F., Wessels, J., Zijm, W.H.M.: A compensation approach for two-dimensional Markov
processes. Adv. Appl. Probab. 25(4), 783–817 (1993)
5. Cohen, J.W., Boxma, O.J.: Boundary Value Problems in Queueing System Analysis. North-Holland,
Amsterdam (1983)
6. Fayolle, G., Iasnogorodski, R., Malyshev, V.: Random Walks in the Quarter Plane. Springer, Berlin
(1999)
7. Foss, S.G., Chernova, N.I.: On optimality of FCFS discipline in multi-channel queueing systems andnetworks. Sib. Math. J. 42, 372–385 (2001)
8. Haight, F.A.: Two queues in parallel. Biometrika 45(3–4), 401–410 (1958)
9. Kingman, J.F.C.: Two similar queues in parallel. Ann. Math. Stat. 32(4), 1314–1323 (1961)
10. Liu, Z., Nain, P., Towsley, D.: Sample path methods in the control of queues. Queueing Syst. 21,
293–335 (1995)
11. Marden, M.: Kakeya’s problem on the zeros of the derivative of a polynomial. Trans. Am. Math. Soc.
45(3), 355–368 (1939)
12. Miyazawa, M.: Light tail asymptotics in multidimensional reflecting processes for queueing networks.
Top. doi:10.1007/s11750-011-0179-7 (2011)
13. Sakuma, Y., Miyazawa, M., Zhao, Y.Q.: Decay rate for the PH/M/2 queue with shortest queue
discipline. Queueing Syst. 53, 189–201 (2006)