Embed Size (px)
Citation preview

Annals of Physics 348 (2014) 127–143
Contents lists available at ScienceDirect
Annals of Physics
journal homepage: www.elsevier.com/locate/aop
Entropy and stability of phase synchronisationof oscillators on networksAlexander C. Kalloniatis ∗
Defence Science and Technology Organisation, Canberra, ACT 2600, Australia
a r t i c l e i n f o
Article history:Received 23 August 2013Accepted 18 May 2014Available online 24 May 2014
Keywords:EntropySynchronisationOscillatorKuramotoPesin theorem
a b s t r a c t
I examine the role of entropy in the transition from incoherenceto phase synchronisation in the Kuramoto model of N coupledphase oscillators on a general undirected network. In a Hamilto-nian ‘action-angle’ formulation, auxiliary variables Ji combine withthe phases θi to determine a conserved system with a 2N dimen-sional phase space. In the vicinity of the fixed point for phase syn-chronisation, θi ≈ θj, which is known to be stable, the auxiliaryvariables Ji exhibit instability. This manifests Liouville’s Theorem inthe phase synchronised regime in that contraction in the θi partsof phase space are compensated for by expansion in the auxiliarydimensions. I formulate an entropy rate based on the projection ofthe Ji onto eigenvectors of the graph Laplacian that satisfies Pesin’sTheorem. This leads to the insight that the evolution to phase syn-chronisation of the Kuramoto model is equivalent to the approachto a state of monotonically increasing entropy. Indeed, for unequalintrinsic frequencies on the nodes, the networks that achieve theclosest to exact phase synchronisation are those which enjoy thehighest entropyproduction. I comparenumerical results for a rangeof networks.
Crown Copyright© 2014 Published by Elsevier Inc. All rightsreserved.
1. Introduction
In recent decades, entropy has emerged from its original 19th century garb ofmechanical heat sys-tems at equilibrium, to become a keymeasure of the behaviour of general dynamical, non-mechanical,
∗ Tel.: +61 2 6128 6468; fax: +61 2 6128 6440.E-mail address: [email protected].
http://dx.doi.org/10.1016/j.aop.2014.05.0120003-4916/Crown Copyright© 2014 Published by Elsevier Inc. All rights reserved.

128 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
systems, even far-from-equilibrium (for a review, see [1]). Among these developments, maximum en-tropy has been shown to be a valid principle in governing the behaviour of diverse systemswithin theneighbourhood of equilibrium [2], and maximum entropy production for behaviours far from equi-librium [3]. Mathematical dynamical models of complex systems, such as for networks of coupledoscillators, can be a test-bed for such ideas particularly because many of them demonstrate evolutionfrom incoherence to coherence and thus, seemingly, span a range of behaviours close to and awayfrom equilibrium.
In particular, the Kuramoto model [4] on a network, defined by
θi = ωi +KN
Nj=1
Aij sin(θj − θi), (1)
combines a number of simple features yet exhibits rich behaviours (see [5] for recent reviews). Hereθi is a time-dependent phase angle at node i of a network of N nodes of a graph G. For this paper I willtake G to be undirected and connected. The topology of the graph is encoded in the adjacency matrixA, where Aij = 1, j = i where nodes i and j are connected, zero otherwise, and Aii = 0. The ωi arenatural frequencies of the oscillator at node i, typically drawn from some random distribution. Thequantity K is a real valued coupling constant. Kuramoto [4] originally proposed, and solved for thecritical coupling, the model for the complete graph, Aij = 1 ∀ i = j, and N → ∞. Order parametersr, Ψ defined through
r(t)eiΨ (t)=
1N
j
eiθj(t) (2)
enable understanding of the system dynamics; here and in the rest of the paper the range of summa-tions will be left implicit except when necessary to handle specific terms.
The Kuramoto model, as a stylised representation, has been the basis for applications in neuralnetworks and Josephson junctions and laser arrays; see Acebron et al. in [5] for an overview. It has alsobeen applied to brain neuron synchronisation [6]. I have recently introduced the model as the basisof representation of distributed (or social) decision-making systems based on iterated observation-processing-action loops, for example by the introduction of noise [7].
For strong coupling K , r monotonically reaches a plateau close to 1: the phases synchronise θi ≈ θjby rearrangement into clusters according to affinity either in frequency or network connectivity [8],and these clusters in turn merge. Note that phase synchronisation (nearly equal phases) is a formof frequency synchronisation (nearly equal phase velocities) but where the latter can include casesof quite different locked phases. In this paper I explore the extent to which thermodynamics – withnotions of equilibrium, phase space and entropy – can apply to the Kuramoto model. This requiresanswering a series of inter-related questions. What is the environment outside of the oscillator sys-tem, towhich ‘heat flows’?What is the proper phase space of coordinates andmomenta, andwhat arethe flows in this larger space given that synchronisation corresponds to the space of possible phasesshrinking? Is the ‘irreversibility’ of the progress to phase synchronisation at strong coupling not onlyunderstandable in terms of Lyapunov stability, but also through entropy—and what is that entropy?In other words, is there a ‘Second Law of Thermodynamics’ description of oscillator phase synchroni-sation? I shall answer all these questions in this paper.
Garcia-Morales, Pellicer andManzanares [9], in proposing aHamiltonian action-angles formulationfor the complete network case of the Kuramoto model, have provided an answer to the first of thesequestions, and thus provided a foundation for the rest. For the strong coupling, or phase synchronis-ing, regime they identified the action variables as the ‘environment’. As a Hamiltonian system now,energy conservation is valid but over a system involving more variables than just the θi. In this paper,I extend [9] to arbitrary networks and achieve a 2N dimensional phase space description in whichLiouville’s Theorem applies: the density of points in phase space is conserved in time. Moreover, Iprovide an insight not available in [9]: there is a deep relationship between the stability properties ofthe synchronising phase fixed point and the entropy of the action-angle system. Specifically, while [9]showed that the action variables are auxiliary to θi, because of the high symmetry properties of the

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 129
complete graph their paper did not identify that the auxiliary variables involve the graph Laplacian.The spectral properties of the Laplacian both encode measures of connectivity of the network [10,11]and determine the stability of the phase synchronised state for many synchronising systems (not justthe Kuramoto model) [12].
I make several important clarifications at this point about the thermodynamic ‘status’ of the Ku-ramoto model and types of entropy. First, there is no notion of a finite volume in this system as, forany coupling, there is at least one direction in which the system is always expanding: the averagephase θ (t) = ωt . Therefore the distinction between extensive and intensive variables does not applyand there is no strict notion of thermodynamic equilibrium. Thus, I am more concerned with ‘SecondLaw’ like behaviour of the Kuramoto model (this is the last time I will use inverted commas aroundthat expression), namely regimes of non-decreasing entropy. Such non-equilibrium Second Law likebehaviour is not unknown, as most recently explored in general by a range of authors [13,14]. Second,I will always refer to the entropy related to the statistical weight of states in a phase space descrip-tion of the system. Sometimes this is called the ‘metric entropy’ because it arises from the geometricdescription of deformations of trajectories in this space. This should be contrasted with a measure as-sociatedwith only theN phase angles θi—the configurational, or ‘space order’ [1], entropy. Clearly, withthe popular understanding of entropy as ‘disorder’, a strongly coupled Kuramoto system starting withrandom initial phase angles evolving to a phase locked fixed point can be described as a system evolv-ing from a high to low configurational entropy state. In giving aHamiltonian description of the system,I will identify the conjugate variables in which there is a corresponding increase of entropy throughthe evolution such that the total metric entropy is conserved, which follows from Liouville’s Theorem.
I will use the Kuramoto model to demonstrate two key associations (which may be properties ofother oscillator type dynamical systems at strong coupling): the stability of phase synchronised fixedpoints is indeed related to the Second Law like behaviour, and the topology of the network appearsquite elegantly in this property through the graph Laplacian.
The paper is structured as follows. In the next section, I generalise the action-angles approach to theKuramoto model of [9] for a general undirected network. I then show typical solutions of this systemfor an example network. After that I expose the relationship between the action-angles formalism andstability properties of the Kuramoto system. A two-dimensional visualisation of the 2N dimensionalphase space dynamics is then derived, and I illustrate the different types of behaviours across threeranges of coupling constant. I subsequently propose an entropy rate following [9], and show that itsatisfies other well-known properties required of an entropy for general dynamical systems. I showthat this entropy rate is maximal for networks that phase synchronise better providing an entropyinterpretation for the synchronisation process. I illustrate results for a number of networks of quitedifferent structure. Finally, I state conclusions and consider directions for future work.
2. Kuramoto model in action-angle formalism
Following [9], the Kuramoto model Eq. (1) can be derived from the following Hamiltonian
H[θ, J] =
i
Ji(ωi + Vi[θ ]),
Vi[θ ] = κ
j
Aij sin(θj − θi) (3)
with dynamical variables θi, Ji, and coupling constant κ = K/N . The dynamics are now described byHamilton equations of motion:
θi =∂H∂ Ji
= ωi + Vi[θ ] (4)
Ji = −∂H∂θi
= −
j
∂Vj[θ ]
∂θiJj. (5)
Eq. (4) is recognised as the original Kuramoto model, Eq. (1). Thus the full dynamics remain inthe phases θi, the ‘angle variables’, while the ‘action variables’ Ji are purely auxiliary in their time-dependence coming through that of the phases. Through the formulation with Eqs. (3) it is now

130 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
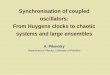
Fig. 1. A network of 10 nodes generated by starting with a complete graph and removing some links, hence referred to as an‘incomplete graph’.
meaningful to speak of a conserved ‘energy’ of the Kuramoto system, but where the two terms inH should not be read off as kinetic and potential energies (the action-angles approach mixes suchconstructs). Consequently, one can now correctly speak of a 2N-dimensional phase space (θi, Ji), incontrast to the N-dimensional configuration space of phases θi. And, associated with the conservationof energy, Liouville’s theorem applies: the density of trajectories in phase space of the evolving systemis always conserved. Thus, expansion of trajectories in some directions of the phase space is alwayscompensated for by contraction of trajectories in the other directions. Which directions expand andwhich contract depends on the coupling strength.
3. Example solutions
In order to visualise the content of the auxiliary degrees of freedom I illustrate matters using a net-work of N = 10 nodes incompletely connected, with degrees di = (2, 5, 8, 8, 7, 8, 8, 8, 8, 8)which is‘typical’ of many complex graphs in exhibiting some symmetries, but also a degree of asymmetry. Thechoice of ten nodes also is sufficiently large that it allows for genuinely chaotic dynamics in certainregimes, but small enough that individual trajectories can be distinguished in plots. Later in the paperI will compare results for different types of larger networks. The graph in the present case is shownin Fig. 1. I use a fixed set of frequencies drawn from a uniform random distribution with values lyingbetween (0, 1), here:
ωi = (0.328563, 0.388911, 0.667736, 0.850151, 0.018359,0.924806, 0.822739, 0.540904, 0.691371, 0.193964). (6)
I numerically solve the combined system Eqs. (4) and (5) with Mathematica using its NDSolve func-tion. Coupling constant values κ = 0.01, 0.08 and 1 give typical behaviours in theweak, intermediateand strong coupling regimes. Fig. 2 shows the order parameter r for these three cases.
As I am more concerned here with the strong coupling behaviour I show solutions for θi and Ji inthis regime over the time interval it takes for the order parameter r to stabilise near to the value r = 1.In Fig. 3 it is evident that by t = 2 the phases are nearly equal and have locked. On the other hand, inFig. 4 the Ji are clearly diverging over the same time interval as the convergence in Fig. 3, with evenstrong turnovers after the θi have phase synchronised. One such change in direction of a trajectory isevident in Fig. 4 with an, initially, downward divergence turning over to divergence in the positivedirection. I will return to the significance of this later.
4. Analysis of fixed points
To examine the fixed point properties of the system Eqs. (4) and (5) it is useful to define a graph-theoretic object known as the Laplacian [15]:
Lij = Dij − Aij (7)

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 131
Fig. 2. The order parameter r for the incomplete graph at three values of coupling: strong κ = 1 (dashed line very close tor = 1), intermediate κ = 0.08 (thick periodic line), and weak κ = 0.01 (zig-zag line).
Fig. 3. The phases θi for the incomplete graph, frequencies Eq. (6) and κ = 1.
Fig. 4. The auxiliary variables Ji for the incomplete graph, frequencies Eq. (6) and κ = 1.
where D has elements all zero except for the diagonal which are the degrees of the nodes,
di =
j
Aij. (8)

132 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
In view of the differentiation of V in Eq. (5), consider ‘weighting’ each link (i, j) of the graph G withthe cosine of the difference of phases on the associated nodes: wij[∆θ ] = cos(θj − θi). A weightedadjacency matrix can then be computed
Aij[∆θ ] = wij[∆θ ]Aij. (9)
A corresponding weighted degree matrix is defined then by analogy with the unweighted degree:
Dij[∆θ ] = δijk
wik[∆θ ]Aik, (10)
and the weighted Laplacian Lij follows:
Lij[∆θ ] = Dij[∆θ ] − Aij[∆θ ]. (11)
The weightedmatrices are time-dependent through their functional dependence on θi(t). The deriva-tive of V in Eq. (5) turns out to be given in terms of this weighted Laplacian:
∂Vj[θ ]
∂θi= −κLij[∆θ ]. (12)
The significance of the unweighted graph Laplacian appearing here is that it figures in the stabilityproperties of fixed points of systems on networks [12], where the interactions are given by a differenceof a functionof the phases:
j Aij[f (θi)−f (θj)]. As shownby [12], in such systems the interaction canbe
trivially and generally brought into the form of the unweighted Laplacian equation (7). Depending onthe form of the function f , theremay be both stable and unstable directions in the θi. For the Kuramotomodel where the interaction is a function of a difference of phases, the relevance of the Laplacian is notas obvious. Examine fluctuations in the neighbourhood of a fixed point of the system shifted withrespect to a ‘centre-of-mass’ frame formed by the average frequency ω:
θi(t) = ωt + Θi + ηi(t). (13)
Here, time-independent Θi are phases that characterise a frequency synchronised fixed point; ∆Θ ≡
Θi −Θj = 0 ∀ i, j is the special case of a phase synchronised fixed point and ηi are ‘small’ fluctuations.Inserting this in the original Kuramoto model Eq. (1), expanding to first order in the fluctuations andretaining only terms of order η yield the dynamical equation:
ηi(t) = −κ
j
Lij[∆Θ]ηj(t). (14)
The stability of the fluctuations are thus seen to be related to the spectral properties of the Lapla-cian in the static background field Θi. It is therefore useful to project this system onto eigenvectorsof this weighted Laplacian, some of whose spectral properties are well understood; for example, λ0always vanishes [15] and the degeneracy of this zero eigenvalue equals the number of disconnectedcomponents of the graph G.
Let λm[∆Θ] and ν(m)[∆Θ] be the eigenvalues/vectors in the static background ∆Θ , with m =
0, . . . ,N − 1. Let the projection of ηi onto the mth eigenvector ν(m)i be Xm.
In [16] (using a different notation), I solved for the Xm for the phase synchronised case ∆Θ = 0;I denote the Laplacian eigenvalues and vectors here respectively, λm[0] and ν(m)
[0]. Briefly, approxi-mating the sine in Eq. (1) to first order and projecting onto ν(m)
[0] gives
Xm(t) = ω(m)− κλm[0]Xm(t), m = 0, (15)
where ω(m)≡ ν(m)
[0] · ω. The zero mode equation turns out to be proportional to the average fre-quency ω leading to the behaviour discussed in the introduction: X0(t) ∝ ωt . This is the direction,therefore, in which there will be linear expansion in time of the system for any value of the coupling.
The solution to the non-zero modes is
Xm(t) =ω(m)
κλm[0](1 − e−κλm[0]t) + Xm(0)e−κλm[0]t . (16)

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 133
Note that, the consistency with the approximation leading to this requires that ω(m)
κλm[0] is ‘small’ whichis true for sufficiently large coupling and a bounded frequency set.
We observe here that exact phase synchronisation ∆Θ = 0 is not possible for unequal frequen-cies ωi, which shows up as the small ω(m)
κλm[0] . Alternately, using that the normal mode eigenvectors
components sum to zero (
i ν(m)i [0] = 0) equal frequencies render each ω(m)
κλm[0] = 0.With ∆Θ = 0 and time-independent the basic exponential behaviour is still valid for large t ,
Xm(t) ∼ e−κλm[∆Θ]tXm(0). (17)
The stability properties of the fixed point at Θi are thus determined by the spectrum of the associatedweighted Laplacian. For example, for static phases satisfying cos[∆Θ] ≥ 0, by the Gershgorin circletheorem (see, for example, [17]), the spectrum is positive semi-definite: λm[∆Θ] ≥ 0. Such a fixedpoint is a stable attractor. This case includes complete phase synchronisationΘi = Θj ∀ i, j, or regionsclose to it where cos∆Θ ≈ 1 −
12∆Θ2 > 0 (or ∆Θ <
√2) which is my main concern here. I note in
passing that for some topologies there are other stable fixed points in which the Θi are significantlydifferent from each other which can be characterised as exclusively frequency synchronised [17–19].Beyond such perturbative arguments (see also [20,16]), there is numerical evidence for the Kuramotomodel that the Laplacian remains an effective filter of the collective dynamics even before the onset ofphase synchronisation [21]. To summarise the main observation out of this for the Kuramoto model:fluctuations about the phase synchronised fixed point are seen to be completely stable because of thepositive semi-definiteness of the unweighted graph Laplacian L ≡ L[0].
Using Eq. (12) in Eq. (5) gives now for the auxiliary variables
Ji(t) = +κ
j
L[∆θ ]ijJj(t). (18)
The sign difference between Eqs. (14) and (18) is significant and has been made explicit here. Ob-serve that L here is time-dependent through its functional dependence on the fully dynamic θi(t).Introducing the time-ordered exponential Texp via
Q(t, 0) ≡ Texp
κ
t
0dτL[∆θ [τ ]]
(19)
then the solution to Eq. (18), given initial conditions Ji(0), is
Ji(t) =
j
Qij(t, 0)Jj(0). (20)
The solution depends, in other words, on the entire time-evolution of the phase angles. If the θi ap-proach a fixed point, Eq. (13), then the solution can be simplified. Let t1 be the time at which the fixedpoint is approached and Ym the projections of Ji onto eigenvectors of the weighted Laplacian. Usingthe factorisation property of the time-ordered exponential Q(t, 0) = Q(t, t1)Q(t1, 0) for 0 < t1 < t ,it follows that:
Ji(t) =
N−1m=0
ν(m)i [∆Θ]e+κλm[∆Θ](t−t1)Ym(t1), (21)
where Q(t1, 0) is absorbed into Ym(t1). I have also used here the property that for t > t1 the time-order exponential may be diagonalised in the basis of weighted Laplacian eigenvectors at time t1. Atthis point, it is known [15] that the eigenvalues are partially ordered λN−1 ≥ λN−2 ≥ · · · ≥ λ1 >λ0 = 0,with a zeromode even forweighted Laplacianwith positive semi-definiteweights. Note, then,that the first term (m = 0) in Eq. (21) is a constant. The fluctuations in phases about the fixed pointare thus seen to be exponentially suppressed but the auxiliary variables undergo exponential growth;the Ji are unstable if the θi are stable.

134 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
Putting this altogether now I can write the following solution for Ji:
Ji(t) = eκλN−1[∆Θ](t−t1)
ν
(N−1)i [∆Θ]YN−1(t1)
+
N−2m=0
ν(m)i [∆Θ]eκ(λm[∆Θ]−λN−1[∆Θ])(t−t1)Ym(t1)
≈ eκλN−1[∆Θ](t−t1)ν
(N−1)i [∆Θ]YN−1(t1) (22)
for large t , since λm[∆Θ] − λN−1[∆Θ] ≤ 0. The auxiliary variables are thus dominated by the largestLaplacian eigenvalue while their sign depends on the particular component of the eigenvector ν(N−1)
and the sign of Y at the point at which it enters the ‘basin of attraction’ of the phase synchronisedfixed point. This will be important later when I consider a means of computing the entropy.
I make two final observations in this section. In general it is not possible to analytically computethe spectrum of the Laplacian at some intermediate time t1 evenwhen it is known for the unweightedgraph Laplacian L. An approximate relationship between solutions at different times is:
Ym(t) ≈ ν(m)[0] · ν(N−1)
[∆Θ]eκλN−1[∆Θ](t−t1)YN−1(t1). (23)
It is important to note that while the differences between eigenvalues of L and L at t1 may be small,they are sufficient that ν(m,0) and ν(N−1) will not be orthogonal to each other for m = N − 1. In asso-ciation with this, there are N − 1 genuine degrees of freedom,m = 1, . . . ,N − 1, as Y0 is conserved:Y0 = 0 leading to the constant term in Eq. (21). This will be significant when I consider the entropyof the system.
5. Two-dimensional visualisation of phase space dynamics
Liouville’s Theorem can be seen in operation now. Consider a uniform phase space region of vol-ume a2N in which a set of initial trajectories lie. Using the previous results, for strong coupling thetrajectories will lie in a volume (∆x)N(∆y)N with ∆x the extension in θ directions, and ∆y the exten-sion in J directions. The instability, respective stability, in these two parts of phase space mean that∆x → 0 as fast as ∆y → ∞ as time increases. Thus a2 = ∆x∆y as t → ∞, so that the phase spacevolume is conserved.
The influence of attractive fixed points enables a two dimensional visualisation of the associated2N dimensional phase space of variables (θ , J). In fact, Iwill use the unweighted Laplacian basis for thisspace, namely (X, Y ). For example, a graph of three nodes has a 6 dimensional phase space. At strongcoupling where the θi phase synchronise there is a fixed point at coordinates (X∗
1 , X∗
2 , X∗
3 ) in the recti-linear space in the unweighted Laplacian basis. In this three dimensional configuration space trajecto-rieswill approach this single point. Now consider each of the three coordinates X∗
m of the fixed point asthree separate points along a one dimensional line. Trajectories can now be visualised as three individ-ual motions on the same line moving towards each of the points X∗
m. Next, introduce a second dimen-sion corresponding to the auxiliary Ym. The original convergence of trajectories to a point in 2N is thusconverted to a flow along a set of vertical lines in the two dimensional (X, Y ) plane. In particular, fromthe large t behaviour of Eq. (16) it is obvious that X∗
m =ω(m)
κλ(0)m
. For sufficiently strong coupling κ these
points are bunched close to the origin and one anticipates trajectories flowing in either the positiveor negative vertical directions along lines correspondingly bunched close to the vertical axis. Finally,it turns out to be more useful to plot not the pair (Xm(t), Ym(t)) but (Xm(t), Re(ln(Ym(t)))) for eachmbecause I am more interested in the overall phase of Ym and in anticipation of the logarithm in defin-ing entropy. I consider only the normal modes m = 0; in all cases there will be a straight horizontaltrajectory in the space increasing linearly in time corresponding to the constant Y0 and linear X0 ∼ ωt .
As before, I show the example system solved for strong coupling, κ = 1 and exhibit the evolutionof the trajectories from a random initial configuration, but where I choose θi(0) ∈ [−π/2, π/2] (toguarantee that phases do not synchronise onto nπ copies of the point θi = θj). The most significant

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 135
Fig. 5. Example of the phase space trajectories for the incomplete graph at strong coupling κ = 1 where θi(0) ∈ [−π/2, π/2]where trajectories start close to the horizontal axis and, after various transients, flow vertically upwards as indicated by thearrow.
feature of the trajectories in Fig. 5 is the flowof paths in the plane from close to the horizontal axis ontovertical lines; note the arrow in the figure indicating the direction of flowof trajectorieswith time. Thisis consistent, as discussed above, with a stable fixed point near X = 0 and indicates complete phasesynchronisation. The trajectories flow vertically upwards indefinitely, demonstrating the instabilityof the Y (and thus J) variables at strong coupling.
However, also evident in Fig. 5 is the early time behaviour with significant curvature of some tra-jectories as they move from their initial positions. Indeed one trajectory here even deflects in thenegative direction along a vertical path before reversing and joining the stream flowing vertically up-wards. These non-linearities are evidence of the early chaotic dynamics even in the strongly coupledsystem. It is helpful here to think of this early stage in terms of a competition between other types offixed points with non-zero Θi. The stability properties of these fixed points depend on the spectrumof the weighted Laplacian equation (11), in the vicinity of these points and many will have some di-rections amongst the θi that are unstable. Trajectories from any random initial point (θi(0), Ji(0)) willevidently be influenced by such attractors, leading, to turn-overs in Ji(t) such as the one exhibitedin Fig. 4. Over many independent runs I find that these trajectories are always short-lived, turningaround and eventually converging onto a positively directed vertical line. There is thus scope that ananalysis like that leading to Eq. (21) may apply over initial short time frames. However, tighter resultsthan are available from the Gershgorin Circle Theorem are necessary to make progress here.
I now contrast this behaviour with the solution at weak coupling by plotting some of the solutionsin Fig. 6; not all solutions are plotted here otherwise the plot becomes extremely crowded. The tra-jectories are seen to flow horizontally, albeit erratically. The horizontal component can be understoodfrom the κ = 0 case, namely decoupled oscillators, the trajectories are exactly horizontal since, triv-ially by projection of Eqs. (4) and (5) onto the unweighted Laplacian basis, Xm = ω · ν(m)
[0], Ym = 0 sothat Xm varies with linearly with time-independently of a static Ym. This behaviour is demonstrated inFig. 7. Thus, by contrast, the zig-zags and oscillations in Fig. 6 indicate elementary clustering of subsetsof oscillators within an overall strong incoherence.
It is also interesting to examine the behaviour for an intermediate regime at κ = 0.08, where theorder parameter r exhibits the cyclic behaviour shown in Fig. 2. Here, the coupling is strong enoughto overcome most, but not all, of the heterogeneity of the nodes (either in frequency or connectivity)so that two or three uncorrelated sub-clusters of locked nodes form a metastable state. The faster ofthe sub-clusters therefore ‘laps’ the other(s), with a temporary locking as they draw alongside eachother [16]. In Fig. 8, I show the trajectories in phase space over the full time-period of the numericalsolution t = (0, 2000). Observe that many trajectories flow diagonally upwards through a step-wisecombination of vertical and horizontal trajectories, which demonstrates competition between sta-bility and instability; the overall slope indicates positive Lyapunov exponents for the X degrees of

136 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
Fig. 6. Four of the phase space trajectories for the incomplete graph at weak coupling κ = 0.01; the arrows indicate thedirection of the flow.
Fig. 7. The phase space trajectories for the incomplete graph at vanishing coupling κ = 0; arrows indicate the direction of theflow.
Fig. 8. The phase space trajectories in (X, Y ) space for the incomplete graph at intermediate coupling κ = 0.08; arrowsindicate the direction of the trajectory flow.
freedom. Other trajectories oscillate about a single line, close to the vertical axis, consistent with con-vergence ontohyper-tori [16]. These trajectories correspond to the oscillators that have locked into thecore, while the trajectories that move diagonally in the plane are the sub-cluster(s) that lap the core.

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 137
Comparing Figs. 5–8, there is evidently an interchange between dynamics in X and Y (or θ and J)directions for different coupling regimes: trajectories diverging in phases diverge in auxiliary direc-tions in one regime of coupling, and vice-versa in another regime. Again, this is a manifestation ofLiouville’s Theorem.
6. Entropy rate at strong coupling
For a general system, a measure of the metric entropy relies on a scheme for partitioning phasespace into non-overlapping cells and then observing the frequency with which trajectories cross eachcell (or the density of trajectories in the cell). Via the Birkhoff theorem, ergodicity of a system (wheretrajectories fill phase space) goes hand in hand with existence of an invariant measure on which tobase a partition. Such measures are difficult to find in general because of the complexity of expan-sions and contractions of the system trajectories, and therefore an associated entropy is difficult toexpress in closed form. This property of twisting of trajectories is partly evident in the curvature oftrajectories close to the horizontal axis in Fig. 5, as is the overall space-filling behaviour at strong cou-pling. More can be said in general about the entropy rate otherwise known as the Kolmogorov–Sinai‘entropy’ [22], a measure invariant definition which involves taking of a supremum over all possiblemeasurable partitions; it is thus a quantity for which powerful theorems can be proved but for whichit is rarely possible to give a closed-form expression (see for example Sections 4.2 and 4.3 of [1] foran accessible explanation of this). In the regime of fixed points Pesin’s Theorem [23] applies: the Kol-mogorov–Sinai entropy rate equals the sum of the positive Lyapunov exponents, capturing the notionthat in unstable directions trajectories diverge and stable directions shrink to sets ofmeasure zero. Theprecursor to Pesin’s Theorem is Oseledec’s Theorem [24] which dictates that the components relatedto the positive Lyapunov exponents are the ‘characteristic dimensions’ of the phase space. Therefore,the unweighted Laplacian eigenvectors provide an appropriate basis for the phase space when thesystem is close to phase synchronisation. Concomitantly, the phase space volume of sets of initiallyclose points expands precisely in these directions, and this is identifiable with increasing entropy. Therelationship of this entropy rate to the non-equilibrium behaviours of a number of chaotic dynamicalsystems is explored in [25].
The ergodicity implicit in Fig. 5 means that these theorems apply to the Kuramoto model at strongcoupling. In particular, I have already identified the Lyapunov exponents representing the expandingdirections in Oseledec’s Theorem in terms of the graph Laplacian eigenvectors. Denoting the time-dependent Kolmogorov–Sinai entropy rate by σ(t), Pesin’s Theorem therefore requires for a stablefixed point characterised by static phases Θi:
limt→∞
σ(t) = κ
N−1m=0
λm[∆Θ]. (24)
As is typical in information theory approaches to dynamical systems, Boltzmann’s constant is taken asunity. Significantly, there are N − 1 contributions here because of the conservation of the zero mode.
Using the Maupertuis principle, [9] proposed that the entropy Si of each degree of freedom in thecomplete network Kuramoto model can be written in terms of logarithm of the action variables ln Ji,with the system entropy S the sum over all of these. The entropy rate, according to this definition, isthus
σ =ddt
Ni=1
ln Ji
=
Ni=1
1JiJi
= κ
Nij=1
1JiL[∆θ ]ijJj. (25)

138 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
Fig. 9. Spectrum of the weighted Laplacian equation (11) as a function of time for the incomplete graph at coupling κ = 1for a particular instance of initial conditions. (For interpretation of the references to colour in this figure legend, the reader isreferred to the web version of this article.)
Rather than writing back in terms of the θi (as [9] do) I persist with the expression in terms of theauxiliary variables. Thus for t > t1, using Eq. (22) and assuming a general background ∆θ ,
σ ≈ κ
Nij=1
(eκλN−1(t−t1)ν(N−1)i YN−1(t1))−1eκλN−1(t−t1)Lijν
(N−1)j YN−1(t1)
= κλN−1
Ni=1
1
= κNλN−1. (26)In the large time limit for the complete graph the maximum unweighted Laplacian eigenvalue isλN−1 = N with degeneracy N − 1, (but the degeneracy does not figure in this way of doing thecalculation). Thus I obtain σ = κN2 as the limiting behaviour. This is inconsistent with Eq. (24) whichwould give the answer σ = κN(N − 1) using the aforementioned degeneracy. However κN(N − 1)is the asymptotic behaviour in Fig. 2 of [9].
The resolution to this is twofold. First, [9] have omitted a non-diagonal contribution in derivingtheir Eq. (33) from their Hamiltonian equation (31). Second, the identification of the degrees of free-dom in [9] is off by one—because of the conservation of the zero mode of Ji.
The most succinct way to formulate the entropy as the logarithm of the action variables and countthe right degrees of freedom is to use their Laplacian projections: S ≡
m=0 lnYm. Oseledec’s Theo-
rem would also recommend this. The time-dependent entropy rate is therefore
σ =
N−1m=0
Ym
Ym(27)
=
N−1m=0
κλm[∆θ ] (28)
using the property that Eq. (18) is diagonal in the Laplacian basis. This result is consistent with Pesin’sTheorem as ∆θ ≈ 0 for phase synchronisation. For the complete graph in the regime of phase syn-chronisation this yields σ → κN(N − 1). Note that there will be small deviations from this to theextent that ∆θ cannot exactly vanish unless the frequencies are equal (as discussed earlier), whoseimplications I will address in the next section.
Eq. (28) provides ameans of numerically computing the entropy rate at finite times. In Fig. 9 I showthe spectrum of the weighted Laplacian for the incomplete graph as a function of time with κ = 1for a particular instance at t = 0. Observe how some eigenvalues begin negative but very quickly all

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 139
Fig. 10. Curves for different proposals for the entropy rate σ as a function of time for the incomplete graph at coupling κ = 1:blue dots using Eq. (28); red dots using Eq. (27) but with the unweighted Laplacian projections Ym; green dots using Eq. (25).The solid blue line shows the sum of the unweighted Laplacian eigenvalues; the solid purple line shows (N − 1)λN−1; and thered line NλN−1 . (For interpretation of the references to colour in this figure legend, the reader is referred to the web version ofthis article.)
but one (the zero mode—purple dots in Fig. 9) become positive and plateau to the unweighted values.Computing the sum of these, or the trace of the weighted Laplacian, again as a function of time givesthe blue dots in Fig. 10. Here I superimpose in addition the following quantities: the entropy computedin terms of Ym/Ym (namely the unweighted Laplacian projections, not Eq. (27)), seen as red dots; thesum of the unweighted Laplacian eigenvalues in the blue line; the value of κNλN−1 in the purple line;and the result of computing Eq. (25) in the green dots. Observe that the latter fluctuates wildly beforeconverging to the value dominated by the maximum eigenvalue which is only visible because of thebreaking of the spectral degeneracy in the ‘incompleteness’ of the graph; I have checked that for thecomplete graph this convergence is repeated, with value κNλN−1 = κN2.
Also, surprisingly, the computation in terms of
m=0 Ym/Ym converges rather rapidly to the resultfrom Eq. (28), deviating only at very early times—essentially by the time the order of eigenvalues inFig. 9 matches that for the unweighted limit. Both the blue and red dots satisfy Pesin’s Theorem andare not dominated by the largest eigenvalue; Eq. (28) cleanly separates each mode enabling their fullcontribution to the entropy rate.
In any case, the curves in Fig. 9 showa characteristic Second Lawbehaviour for the entropy: smoothmonotonic increase reaching a plateauwhere the system has achieved full phase synchronisation andfor any t2 > t1, S(t2) > S(t1) > 0. The import is that the progress of strongly coupled oscillators fromincoherence to synchronisation is irreversible, where increasing entropy is the operating principle. Inother words, the Lyapunov stability of the phase synchronising fixed point is identical to the systembehaving as if a non-equilibrium Second Law of Thermodynamics applied.
7. Entropy rate and synchronisability
For perfect phase synchronisation the entropy rate, using the tracelessness of the unweighted ad-jacency matrix, is seen to equal κTr L = κdT , with dT the total degree of the network. Since increasingconnectivity loosely seems to encourage phase synchronisability, it is tempting to give an entropy in-terpretation for this process. The order parameter r can be extracted by taking the modulus of Eq. (2)to yield
r2 =1N2
i,j
cos(θi − θj) =1N2
i,j
wij. (29)
This evidently only differs from TrL =
ij Aijwij by the adjacency matrix. Thus for the completenetwork (Aij = 1, Aii = 0) there is a one-to-one relationship between σ and r:
σ = κN(Nr2 − 1). (30)

140 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
For general graphs there is no such neat relationship. However, close to phase synchronisation theweights cos(θi − θj) = 1−
12 (θi − θj)
2 can be expanded in unweighted Laplacian modes. The entropyrate and order parameter can be expressed quite compactly in terms of the modes Xm(t):
σ ≈ κ
dT −
m=0
λmXm(t)2
r2 ≈ 1 −1N
m=0
Xm(t)2.
At steady-state, Xm → ω(m)/κλm so that
σ ≈ κdT −1κ
m=0
(ω(m))2
λm(31)
r2 ≈ 1 −1
Nκ2
m=0
(ω(m))2
λ2m
. (32)
Thus deviations from perfect phase synchronisation monotonically decrease both the orderparameter and the entropy rate. However, the square of the order parameter is seen to be moresensitive than the entropy rate to deviations from perfect phase synchronisation for networks withlow-lying Laplacian eigenvalues: the former scales as 1/λ2 in Eq. (32) and the latter as 1/λ in Eq. (31).
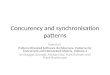
To illustrate these results numerically, I compute the entropy rate for a range of networks eachwithquite different Laplacian spectra. Here I choose N = 27 which is large enough that large N effects canbe seen without overwhelming the picture of the spectrum. The range of networks are: the completenetwork, an incomplete network (with 10 random links removed), a tadpole network of a completeon 26 and one attached node, a cluster of three complete networks loosely connected, a cluster of fivewith links to a common node, and five tree networks. These five are the star, dumbbell, double star,binary tree (hierarchy) and path. I choose a number of trees because their synchronisation propertiescan be significantly different [26] despite having the same total degree dT = 2(N − 1). The networksand their associated unweighted Laplacian spectra are shown in Fig. 11.
This range covers a variety of configurations of low-lying modes and average graph diameter. Inparticular, the five tree graphs have the same total degree and therefore enable testing of sensitivityof results to the fact that ∆θ cannot exactly vanish for unequal frequencies.
I numerically solve the Kuramotomodel for each networkwith the same set of unequal frequencies(one instance out of a uniform distribution ωi ∈ [0, 1]) but arbitrary initial conditions and κ = 10.The latter is sufficient for stable phase synchronisation to be achieved in all of the networks. I considerthe deviation from perfect phase synchronisation 1− r2 and the deviation from unity of a normalisedentropy rate
σ ∗≡
TrLTrL
, (33)
in both cases at t after the dynamics have stabilised (in all cases here t = 50 suffices).Noting that two sets of data points are nearly superimposed in Fig. 12, namely the complete and
incomplete, and the star and dumbbell, a gradual monotonic deviation is evident in the plot with, in-deed, greater variation in r2 than in σ as indicated in the points lying below the line of slope unity. Thenon-tree graphs have their entropy rate clearly dominated by the total degree while the tree graphsare distinguished by increasing ∆θ at steady-state. For example, the path – the most extreme rightpoint – shows an absolutely stable configuration of phases that nonetheless differ by up to π/4, ef-fectively no longer phase but exclusively frequency synchronisation.
The behaviour in Fig. 12 suggests that closeness of the entropy rate for a given network to themaximumachievable (that for a complete network) is interchangeablewith closeness of the system tototal phase synchronisation: observe that values of r to the left/right in Fig. 12 represent better/poorerphase synchronisation. This provides then an entropic interpretation of synchronisation: networks of

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 141
Fig. 11. Different networks with N = 27 nodes and their unweighted Laplacian spectra. On the left from top to bottom:complete, incomplete, tadpole, triple cluster, five cluster. On the right are the tree graphs, from top to bottom: star, dumbbell,double star, hierarchy, and path.
Kuramoto oscillators seek to synchronise by maximising their entropy production. Or, alternately,for fixed N , those networks that synchronise best are those which are structured to allow for greaterentropy production.
I emphasise that this way of viewing synchronisation does not contradict other means of under-standing it. There is evidently some correlation in Fig. 12 between the order of drop off of the differentnetworks with the average network distance and the pattern of low-lying modes in the unweightedLaplacian spectrum in Fig. 11. On the former, this is consistent with the claims of [27]. On the latter,this matches qualitatively with the picture emerging from [21] who show that the existence of low-lying Laplacianmodes can frustrate the approach to full synchronisation of the Kuramotomodel, with

142 A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143
Fig. 12. The deviation of the squared order parameter from full phase synchronisation against the deviation of the normalisedentropy rate from its maximum value for the range of networks in Fig. 11 and with coupling κ = 10. From left to right thepoints correspond to the following networks: complete, incomplete, tadpole, triple cluster, five cluster, star, dumbbell, doublestar, hierarchy, and path. Vertical filling lines assist in distinguishing nearly superimposed points, those for the complete andincomplete graphs and the star and dumbbell. A line of slope one is shown to show the greater deviation of r2 .
modes joining the locked phase cluster according to the position of their eigenvalue in the spectrumfrom highest to lowest, each with their own ‘critical coupling’. Slightly less comparable are the resultsof [28] who show that, for coupling models based on a difference of interaction functions, (which isdifferent from the Kuramoto model) the critical coupling is related to the ratio of highest to lowestLaplacian eigenvalues. Indeed the order of ‘best’ synchronisation (as in closeness of r to one) in Fig. 12does not precisely follow the order of largest to smallest Laplacian eigenvalue.
The entropy rate is also sensitive to both highest and lowest eigenvalues: the highest dominatesthe unweighted Laplacian contribution to Eq. (28), but the lowest are important in the deviationsfrom pure phase synchronisation, ∆θ = 0, through the increasing values of the steady state modesXm = ω(m)/κλm[0]. The advantage of this way of viewing synchronisability is that it is sensitive to thefrequency inhomogeneity, which numerical approaches averaging over a frequency ensemble miss(so that only topology is left). There are two caveats to this: one, that I am considering behaviour afterstable synchronisation is achieved, not the approach to it; and two, that critical coupling andbehaviourof r after the critical couplingmight not be interchangeable, particularly if the latter is defined in termsof some form of instability criterion.
8. Conclusions and future work
The auxiliary variables of an action-angles formulation of the Kuramoto model enable a phasespace understanding of the dynamics of synchronising oscillators. At strong coupling, the stability ofsynchronisation behaves like a system of increasing entropy in the full phase space of coordinates andmomenta. My main conclusion is that the Lyapunov stability of phase synchronisation maps directlyto the Kuramoto system behaving as if the Second Law of Thermodynamics were operating, whereauxiliary variables dominate the phase space dynamics at strong coupling. It is important to stress herethe difference of this to classical thermodynamics: there is no finite volume, no notion of equilibrium,and the number of degrees of freedom cannot be identified purely in the number of phase oscillators.The synchronisation itself is a consequence of an attractor in configuration space driving the systemto the phase synchronised state. The entropy rate is directly related to the order parameter for thecomplete network. But even for general networks the entropy rate is correlated with the capacity forphase synchronisation.
I have avoided in this paper tackling the critical coupling as defined through an instability criterion.However, the phase space behaviour of the system at intermediate coupling in Fig. 8 may provide away forward on this question. As I noted in [16], the change from cyclicity to a plateau in the orderparameter r across such values of coupling has associations with a first order phase transition so that

A.C. Kalloniatis / Annals of Physics 348 (2014) 127–143 143
the coupling at such points may bemore appropriately interpreted as a ‘critical’ value. Such couplingscan be determined by expanding Eq. (1) to higher orders in fluctuations, which Iwas not generally ableto solve in [16]. I speculate that the symmetry in the directions of the flows of phase space trajectoriesin Fig. 8 at intermediate couplingmay provide a way forward for determining critical coupling values.
Though I have used the example of the Kuramoto model, this approach is applicable to anydynamical system of first order differential equations, such as the logistics and Lotka–Volterramodelsfor species population dynamics, andmay lead to deeper insights into their complexity. For the classesof systems considered by [12] there may be a richer fixed point structure even in the vicinity of phasesynchronisation. This may also be relevant to the Kuramotomodel for certain classes of graphs, whereTaylor [19] has shown that non-phase but frequency synchronised fixed points exist and are stablefor any large value of the coupling constant which therefore compete with the phase synchronisedattractor for phase space trajectories.
Acknowledgements
I thank Robert Niven for an opportunity to attendMEP2011, which inspired this work, and RichardTaylor, Tony Dekker, Mathew Zuparic and Markus Brede for insightful discussions.
References
[1] F.A. Bais, J.D. Farmer, in: P. Adriaans, J. van Benthem (Eds.), The Physics of Information, Philosophy of Information, Elsevier,2008, pp. 609–684.
[2] E.T. Jaynes, in: G.L. Bretthorst (Ed.), Probability Theory: The Logic of Science, Cambridge University Press, 2003.[3] R. Swenson, Emergent evolution and the global attractor: the evolutionary epistemology of Entropy production
maximization, in: P. Leddington (Ed.), Proceedings of the 33rd Annual Meeting of the International Society for SystemsSciences, vol. 33(3), 1989, pp. 46–53; R.C. Dewar, J. Phys. A: Math. Gen. 36 (2003) 631.
[4] Y. Kuramoto, Chemical Oscillations, Waves and Turbulence, Springer, Berlin, 1984.[5] J.A. Acebron, et al., Rev. Modern Phys. 77 (2005) 137;
S.N. Dorogovtsev, A.V. Goltsev, J.F.F. Mendes, Rev. Modern Phys. 80 (2008) 1275;A. Arenas, et al., Phys. Rep. 469 (2008) 93;F. Doerfler, F. Bullo, Automatica (2013) in press.
[6] D. Cumin, C.P. Unsworth, Physica D 226 (2) (2007) 181–196.[7] M.L. Zuparic, A.C. Kalloniatis, Physica D 255 (2013) 35–51.[8] M. Brede, Eur. Phys. J. B 62 (2008) 87.[9] V. Garcia-Morales, J. Pellicer, J.A. Manzanares, Ann. Phys. 323 (2008) 1844–1858.
[10] M. Fiedler, Czechoslovak Math. J. 23 (98) (1973) 298.[11] B. Mohar, in: G. Hahn, G. Sabidussi (Eds.), Graph Symmetry: Algebraic Methods and Applications, in: NATO ASI Ser. C,
vol. 497, Kluwer, 1997, pp. 225–275.[12] L.M. Pecora, T.L. Carroll, Phys. Rev. Lett. 80 (1998) 2109.[13] G. Baris Bagci, U. Tirnakli, J. Kurths, Phys. Rev. E 87 (2013) 032161.[14] M. Esposito, C. Van den Broeck, Phys. Rev. E 82 (2010) 011143. 011144, 2010.[15] B. Bollobás, Modern Graph Theory, Graduate Texts in Mathematics, Springer, New York, 1998.[16] A.C. Kalloniatis, Phys. Rev. E 82 (2010) 066202.[17] J. Ochab, P.F. Gora, Summer Solstice 2009 International Conference on Discrete Models of Complex Systems, 2009,
arXiv:0909.0043v1 [nlin.AO].[18] F. Doerfler, F. Bullo, SIAM J. Appl. Dyn. Syst. 10 (2011) 1070–1099.[19] R. Taylor, J. Phys. A 45 (2012) 055102.[20] A. Arenas, A. Diaz-Guilera, C.J. Pérez-Vincente, Phys. Rev. Lett. 96 (2006) 114102.[21] P.N. McGraw, M. Menzinger, Phys. Rev. E 77 (2008) 031102.[22] A.N. Kolmogorov, Dokl. Russ. Acad. Sci. 119 (1958) 861–864. 124, (1959) 754–755;
Ya.G. Sinai, Doklady of Russian Academy of Sciences 124 (1959) 768–771.[23] Ya.B. Pesin, Dokl. Akad. Nauk SSSR 226 (1976) 774 (in Russian).[24] V.I. Oseledec, Trans. Moscow Math. Soc. 19 (1968) 197–231.[25] V. Latora, M. Baranger, Phys. Rev. Lett. 82 (1999) 520–523.[26] A.H. Dekker, R. Taylor, SIAM J. Appl. Dyn. Syst. 12 (2013) 596–617.[27] A.H. Dekker, Proceedings of the 33rd Australian Computer Science Conference, CRPIT 102, Australian Computer Society,
2010, pp. 127–131.[28] M. Barahona, L.M. Pecora, Phys. Rev. Lett. 89 (2002) 054101.