Embed Size (px)
Citation preview

ENT 289
Tutorial 1
Lecture 1: Introduction to Drive Systems
1. State definition of electric drives.
Electric drive: Is a system consisting one or several electric motors and of the entire electric
control equipment designed to govern the performance of these motors (IEEE Standard).
2. Explain two drawbacks of using mechanical type of drive compared to electric drive.
a. The system’s response to change in motion is slow due to the inertia of material
used
b. Moving parts need periodic lubrication and protection from oxidation and corrosion
as well as repair or replacement
c. The distance where the power can be transmitted economically is limited due to the
weight and inertia of the material
3. Discuss which one of the fluid power system is preferred over three factors: a)force, b) cost
c) precision
a. Cost: Pneumatics are considerably use less cost to build and operate over hydraulic
system because no reservoir is needed to store fluid, sustainable fluid supply from
air. Design and control of the system was also simpler and maintenance wise its
easier and cheaper.
b. Force: However, when higher force or torque is needed, pneumatics needs larger
motors or cylinders than hydraulics. Usually, hydraulic is used when higher forces
are needed
c. Precision: Fluid vary in controllability. Unlike hydraulic, gasses change volume
significantly when pressurized. When precision is needed, usually, hydraulic is used
4. Sketch and justify a device you know that has following number degree of freedom (DOF):
a) One DOF b) Two DOF c) Three DOF
a. Ceiling fan. Only fan blade rotates driven by electric motor
b. Control knob for stove. Push the knob in to unlock and turn the knob anti clockwise
to adjust the burner
c. Stand fan. Fan blade rotates driven by electric motor. The motor can be turned at
specific angle to increase the scope. The vertical height of motor from the ground
can also adjusted
Lecture 2: Electric and Electromagnetic Fundamentals
1. Differ electromagnet from permanent magnet.
Permanent magnet: stays magnetized. Occur naturally in some rocks, particularly lodestone
but are now more commonly manufactured
Electromagnet: is a type of magnet which the magnetic field is produced by the flow of
electric current

2. What is the SI units of
a) Magnetic flux b) magnetic flux density c) magnetic strength d) magnetomotive force
Quantity SI unit
Magnetic flux Weber
Magnetic flux density Tesla
Magnetic field strength Ampere turn per meter
Magnetomotive force Ampere
3. Figure 1 shows a coil of 1600 turns surround a flux of 22 mWb produced by a permanent
magnet. In about 50 msec, the magnet was withdrawn out from the coil, causing the flux
inside the coil to drop uniformly to 8 mWb. This action has caused voltage to be generated
at the coil terminal. State the principle describing the phenomena and determine the value
of the voltage generated.
Figure 1
Faraday’s Law: If the flux passes through a turn of a coil of wire as a function of time, a voltage
is induced between its terminals. The value of the induced voltage is proportional to the rate of
change of flux
E = n x (phi1 – phi2)/t = 1600 x (22m-8m)/50m = 448V
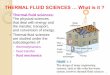
4. Figure 2 shows a ferromagnetic core with a wire wound in form of coil on the left leg.
Assume the depth of the core is 5cm and µr = 1000
a) Determine the value of the current to produce flux 60 mWb.
Phi = N x i /R
R = l / (µ x A)

Total reluctance, R = 201.6kA.t/Wb
i = R x phi / N = 201.6kA.t/Wb x 60m Wb /500 = 24.19A
b) Determine the flux density at i) top side of the core ii) right leg of the core
i) Flux density, B = 0.06/(0.15m x 0.05m) = 8T
ii) Flux density, B = 0.06/(0.05m x 0.05m) = 24T
Figure 2
Lecture 3: DC Generator
1. Explain the working principles of elementary DC generator.
In a DC generator, armature coil is rotated by external driving force, such as motor. The coil
is connected to a commutator. In its simplest form, commutator is composed of a slip ring
that is cut in half with each segment insulated from the other as well as from the shaft. One
segment is connected to coil-end and the other segment to another coil-end. The
commutator revolves with the coil and the voltage between the segments is picked up by
the two stationary brushes.

2. Explain how the commutator as mechanical rectifier generates the DC voltage in DC
generator.
3. Sketch the plot for output voltage for elementary DC generator if 2 coils were used as the
armature instead of one. Explain the plot.

4. Armature of 6-pole, 600rpm generator has 60 slots. The generator has lap winding. Brushes
positions are on neutral. Each coil has 8 turns and the flux per pole is 10mWb. Calculate
value of induced voltage.
E = Z x n x ɸ /60
Total no of conductors on the armature, Z = 60 x 8 x 2 = 960
n = 600, ɸ = 0.01
E = 960 x 600 x 0.01/60 = 96V
5. Explain the difference between series, shunt and compound DC generator.
Series, shunt and compound DC generators have their fields self-excited. The main
difference is the way field is connected to the armature.

Figure: Connection diagram of series DC generator. The field is connected in series with the
armature.
Figure: Connection diagram of shunt DC generator. The field is connected in parallel with the
armature.
Figure: Connection diagram of compound DC generator. The one field is connected in series and
another field is connected in parallel with the armature.
Series wound generator
A series-wound dc generator has the characteristic that the output voltage varies directly with the load current.
Shunt wound generator
The output voltage in a dc shunt-wound generator varies inversely as load current varies.
Compound generator
The output voltage remains relatively constant for all values of load current within the design of the generator.

6. A separately excited DC generator turning at 1400rpm produces an induced voltage of 127V.
The armature resistance is 2Ω and the machine delivers current of 12A.
Calculate:
a) Terminal voltage
b) Heat dissipated in armature
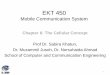
7. Figure 3 shows no-load saturation curve of a separately excited DC generator when it
revolves at 1500rpm. Calculate the exciting current needed to generate 120V at 1330rpm.
Figure 3
8. Assume figure 3 shows no-load saturation curve of a shunt generator. We want to control
the generator voltage by connecting a rheostat in series with the shunt field. Determine the
maximum no-load voltage the generator can produce if total shunt resistance (field +
rheostat) is 80Ω.
Lecture 4: DC Motor
1. Explain how counter-electromotive force (CEMF) in a DC motor produced.
Consider a DC generator in whuch the armature initially at rest is connected to a DC source
Es by means of switch. The armature has a resistance R and the magnetic field is created by
a set of permanent magnets.
As soon as the switch is closed, a large current flows in the armature because its resistance is
very low. The individual armature conductors are immediately subjected to a force because
they are immersed in the magnetic field created by the permanent magnets. These forces
add up to produce a powerful torque causing the armature to rotate.
On the other hand, as soon as the armature begins to turn, the generator effect happens.
Voltage E0 is induced in the armature conductors as soon as they cut a magnetic field. The
induced voltage e0 is called counter electromotive force (CEMF) because its polarity always
acts against the source voltage Es. It acts against the voltage in sense that the net voltage
acting in the series circuit is equal to (Es – E0) volts.

2. Following details are given on a 225kW, 250V, 1200rpm dc motor:
Armature coils 243
Turns per coil 4
Type of winding lap
Armature slots 162
Commutator segments 243
Field poles 6
Calculate:
a. Rated armature current
b. Number of conductors per slot
c. Flux per pole
a. Assume the induced voltage E0 is nearly equal to the applied voltage (250V).
Hence rated armature current, I = P/E0 = 225000/250 = 900A
b. Each coil is made up of 2 conductors, so altogether there are 243 x 2 = 486 conductors
on the armature
Conductors per slot = 486/162 = 3
c. The motor torque, T = 9.55P/n = 9.55(225000)/1200 = 1791N.m
Hence, flux per pole, ɸ = 6.28 T/ZI = (6.28 x 1791)/(486 x 900) = 25.7mWb
3. Discuss the different ways to control speed of DC motor.
Generally there are two ways to control speed of DC motor: Armature speed control and
field speed control.
Figure: Circuit diagram for armature speed control
In the figure, rheostat is placed in series with the armature. Field Current is constant; so, Φ is
constant. If resistance in Arm Rheostat increased, Fixed value of Es is reduced by voltage
drop in rheostat and hence n is reduced.
(1) Enables to reduce speed below nominal speed
(2) Recommended for small motors

(3) Lot of power wasted in the rheostat such that efficiency is low
(4) Poor speed regulation : IR drop (loss) is high as I increase which causes substantial drop in
speed with increasing mechanical load (not robust).
Another method that also use armature speed control is Ward-Leonard system.
Figure: Circuit diagram for field speed control
In the figure, rheostat is placed in series with the shunt field.
EO = Z Φ n / 60 if IX changes, Φ changes.Φ reduces if resistance of Rheostat increases.
Then n increases.
(1) Better for speed control of higher level speed
(2) Field loss is much less; IX is usually small ( 1-2 amps)
(3) Efficiency is better than that of armature speed control.
(4) Too much of reduction of field flux current increases the speed to dangerously high level.
Lecture 5: AC Motor
1. Calculate synchronous speed of a 3-phase, 12-pole induction motor that is excited by 60Hz
source. What is the nominal speed if the slip at full-load is 6%?
Ns = 120f/p
F = 60, p = 12
Ns = 120(60)/12 = 600rpm
Slip = 0.06
(Ns – Nr)/Ns = 0.06
(600 – Nr)/600 = 0.06
Nr = 564rpm
2. A 3-phase, 6-pole induction motor is connected to a 60Hz supply. The voltage induced in the
rotor bars is 4V when the rotor is locked. If the motor turns in the same direction as the flux,
calculate the approximate voltage induced and its frequency:
a. At 300rpm
b. At 1000rpm
c. At 1500rpm

Eoc = 4V, Ns = 120(60)/6 = 1200rpm
a) S = (1200 – 300)/1200 = 0.75
E2 = sEoc = 0.75(4) = 3V, f2 =sf = 0.75(60) = 45Hz
b) S = (1200 – 1000)/1200 = 0.167
E2 = 0.167(4) = 0.668V, f2 =0.167(60) = 10Hz
c) S = (1200 – 1500)/1200 = -0.25
E2 = 0.25(4) = 1V, f2 = 0.25(60) = 15Hz
3. Refer to figure below. Assume 6 salient poles type of stator was used and the motor was
connected to 3-phase source with each coil per phase has 8 turns.
a. Calculate the instantaneous values of Ia, Ib and Ic at angle 200°
b. Calculate the mmf developed in windings by each phase at this instant
c. Sketch the flux pattern of the stator at 240°
From the figure and calculation:
a) Ia = 10.cos(x), Ib = 10.cos(x-120deg) and Ic = 10.cos(x-240deg)
Hence, at 200deg,
Ia = 10.cos(200) = -9.40A
Ib = 10.cos(80) = 1.74A
Ic = 10.cos(-40) = 7.66A
b) Mmf at phase A = (9.4)(16 turns) = 150.4amp-turn, mmf phase B =
(1.74)(16) = 27.84amp-turn, mmf phase C = (7.66)(16) = 122.56amp-turn
c)

4. A 3-phase induction motor having nominal rating of 100hp and a synchronous speed of
1800rpm is connected to a 600V source. The two-wattmeter method shows a total power
consumption of 70kW and an ammeter indicates a line current of 78A. Precise measurement
gives a rotor speed of 1763rpm. In addition, the following characteristics are known about
the motor:
stator iron losses Pf= 2kW
windage and friction loss = 1.2kW
resistance between two stator terminals = 0.34Ω
Calculate:
a. Power supplied to the rotor
b. Rotor I2R losses
c. Mechanical power supplied to the load in hp
d. Efficiency
e. Torque developed at 1763rpm
a) Power supplied to the stator = 70kW
Stator resistance per phase = 0.34/2 = 0.17Ω
Stator I2R losses are
Pjs = 3I2R = 3 x (78)2 x 0.17 = 3.1kW
Pr = Pe – Pjs – Pf = (70 – 3.1 – 2) = 64.9kW
b) Slip s = (ns – n)/ns = (1800 – 1763)/1800 = 0.0205
Rotor I2R losses, Pjr = sPr = (0.0205)(64.9) = 1.33kW
c) Mechanical power supplied to the load, Pm
Pm = Pr – Pjr = 64.9 – 1.33 = 63.57kW = 63.57/0.746 = 85.2hp
d) Efficency, η
η = PL/Pe
PL = Pm – Pv = 63.57 – 1.2 = 62.37kW
e) Torque at 1763rpm
Torque = 9.55Pm/n = 9.55(63.57)/1.763 = 344.35N.m
5. Explain the torque-speed curve of a conventional 3-phase induction motor whose nominal
full-load torque is T.

The figure shows typical torque-speed relationship of 3-phase induction motor where
nominal full load torque is at T. The torque that motor delivers depends on its rotating
speed. The nominal torque is the torque that can be given by the motor at full time. Nominal
torque was set lower than starting (locked rotor) torque so motor can start at full nominal
load. As you increase the load (torque) the speed of the motor rotation slows down.
However, after some maximal torque the motor stops and will restart again only if the
torque drops down below the starting torque level.
6. Consider equivalent circuit of a 5hp squirrel cage induction motor. Motor parameters are
given as follows:
Line to Line supply voltage = 440V
Synchronous speed = 1800rpm
Measured speed = 1720rpm
Stator resistance = 1.5Ω
Rotor resistance = 1.2Ω
Total leakage reactance = 6Ω
Magnetizing reactance = 110Ω
No-load losses resistance = 900Ω
Determine torque developed by the motor at that speed.
Equivalent circuit referred to stator

Eg = 440V/surd(3) = 254 r1 = 1.5Ω R2 = 1.2Ω jx = 6Ω jXm = 110Ω Rm = 900Ω
At speed, n = 1720rpm
Slip, s = (1800-1720)/1800 = 0.044
R2/s = 1.2/0.044 = 27.3
Torque = 9.55Pm/n
Pm = Pr (1 – s)
Pr = I12R2/s
I1 = Eg/Z
Net resistance branch = 1.5 + 27.3 = 28.8
Z = surd [(28.8)2 + (6)2] = 29.42
I1 = 254/29.42 = 8.63 Pr = 2.03kW Pm = 2.03 (1-0.044) = 1.94kW T = 9.55 x 3 x (1.94k)/1720 = 32.3N.m
Efficiency = Pm/P P = Eg2/Rm + I12r1 + I12 + I12R2/s = 71.68 + 111.72 + 74.5 + 2033.8 = 2.2917kW Efficiency = 2.03k/2.292k x 100% = 88.6%




















![Scan Me - portal.unimap.edu.myportal.unimap.edu.my/portal/page/portal30/Lecture... · [Anda menguruskan penghasilan ubat baru di pasaran.Peranan anda adalah:] ... of the pharmaceutical](https://img.pdfslide.us/doc/110x75/6085d1571d9bfe335e46c6be/scan-me-anda-menguruskan-penghasilan-ubat-baru-di-pasaranperanan-anda-adalah.jpg)