Embed Size (px)
Citation preview

ENSIETA Autonomous vehicle SAUC’ISSE

09/07/2009 - 2ENSIETA Autonomous vehicle SAUC’ISSE
> Content1. Introduction
2. Technical design1. Mechanical description
2. Embedded electronic architecture
3. Safety considerations
3. Craftsmanship
4. Conclusion
SAUC’ Interval Super Submarine of Ensieta
09/07/2009 - 3ENSIETA Autonomous vehicle SAUC’ISSE
Introduction

09/07/2009 - 4ENSIETA Autonomous vehicle SAUC’ISSE
Introduction
Team members– Fabrice LE BARS (PhD Student)
– Jan SLIWKA (PhD Student)
– Alexandre KABIL (Undergraduate student)
– Arnaud FERRE (Undergraduate student)
– Luc JAULIN (Professor)

09/07/2009 - 5ENSIETA Autonomous vehicle SAUC’ISSE
Technical design

09/07/2009 - 6ENSIETA Autonomous vehicle SAUC’ISSE
Technical Design : Mechanical Description
Aluminium made– Amagnetism – Resistance to corrosion– Watertight
2 aluminium plates with waterproof connectors (3 screws per plate)
Resistance to pressure up to 10 meters Stable in rolling and pitching
– Keel– Easy to equilibrate
3 thrusters (2 horizontal and 1 vertical) 2 removable Plexiglas stages inside

09/07/2009 - 7ENSIETA Autonomous vehicle SAUC’ISSE
Technical Design : Electronic Architecture

09/07/2009 - 8ENSIETA Autonomous vehicle SAUC’ISSE
Technical Design : Safety
It is Red : easy to spot ! Easy emergency switching by a brake Thrusters protected Electronics protection
– No leak for 3 years– Aluminium tube
• Good heat conductor Natural cooling

09/07/2009 - 9ENSIETA Autonomous vehicle SAUC’ISSE
Craftsmanship
09/07/2009 - 10ENSIETA Autonomous vehicle SAUC’ISSE
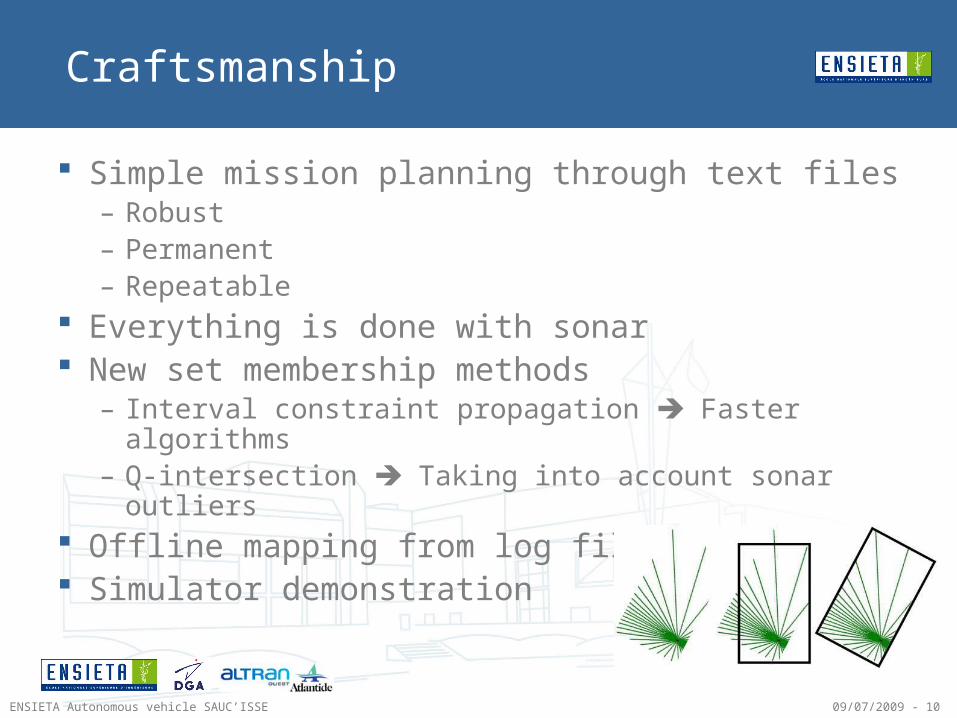
Craftsmanship
Simple mission planning through text files– Robust– Permanent– Repeatable
Everything is done with sonar New set membership methods
– Interval constraint propagation Faster algorithms– Q-intersection Taking into account sonar outliers
Offline mapping from log file Simulator demonstration

09/07/2009 - 11ENSIETA Autonomous vehicle SAUC’ISSE
Conclusion

09/07/2009 - 12ENSIETA Autonomous vehicle SAUC’ISSE
Conclusion
SAUC’ISSE is a simple and robust robot with new and efficient methods