Embed Size (px)
Citation preview

1
Car design performance optimization by interpolation
ENGR 205 Individual Project Report
By Mariraja.P,
Department of Mechanical Engineering
California State University, Fresno, CA
Dr. Fayzul Pasha
Department of Civil and Geomatics Engineering
California State University, Fresno, CA

2
Contents
No. Title Page No.
1. Summary 5
2. Introduction 5
3. Data 6
4. Formulas for calculation 7
5. Methodology 8
6. Results and discussions 10
7. Analysis 23
8. Appendices 23
8. Conclusion 26
9. References 27

3
Tables
No. Title Page No.
1. Car specifications 7
2. Tractive Force and Velocity 10
3. Total Resistance (Rt) and Acceleration (A) 12
4, 6, 8, 10 Linear Interpolation Points 14,15,16,17
5, 7, 9, 11 Newton’s Interpolating Points 14,15,16,17
12 Linear Spline Interpolation Points 19
13 Quadratic Spline coefficients values 21
14 Quadratic Spline Interpolation Points 22

4
Table of Diagrams
No. Title Page No.
1. Vehicle Design Data of BMW 740li – Petrol variant 6
2. Force Vs Velocity 11
3. Velocity vs Acceleration 13
4. Engine Speed Vs Torque 13
5. Engine Speed Vs Brake power 14
6. Linear and Newton’s Interpolation for Velocity Vs Force 15
7. Linear and Newton’s Interpolation for Velocity Vs Acceleration 16
8. Linear and Newton’s Interpolation for Engine Speed Vs Torque 17
9. Linear and Newton’s Interpolation for Engine Speed Vs Brake Power 18
10. Linear Splines for Engine Speed Vs Brake Power 19
11. Quadratic Splines for Engine Speed Vs Brake Power 22

5
Summary
The aim of the project is to consider design criteria of a car and optimize the performanceby interpolating the values to predict the various performance parameters of the car. The enginespecifications, transmission gear ratios, chassis dimensions, wheel descriptions are taken up forformulating brake power, equivalent torque, tractive force, velocity and acceleration of vehicle.Air resistance, rolling resistance are used to calculate the total resistance.
Introduction
The effect on the performance due to the design of the car is being studied. Thedimensions from the design are used to calculate the frontal area which determines the airresistance. The gear ratios and the weight of the car are used for calculating the force of the car.Using force value velocity and acceleration are calculated. Transmission efficiency is assumed tobe 85%. Transmission efficiency is the efficiency put together of all the components thatconnects the engine with the wheels. In this case the rear wheels.
The internal combustion engine (ICE) is an engine in which the combustion of a fuel(normally a fossil fuel) occurs in a combustion chamber that is an integral part of the workingfluid flow circuit. From the spark ignition data the output torque value is obtained. Brake powerand torque values are calculated which determine the acceleration of the car. Brake power is theoutput power from the internal combustion engine. Torque is the tendency to rotate an about anaxis. The resistance offered by the car is by the rolling resistance and air resistance. The rollingresistance caused by the weight of the car increases upon the increase of velocity. The frontalarea leads to air resistance. These resistance along with the transmission efficiency determine theacceleration of the car.
Through these calculation the cars performance can be significantly improved by makingchanges in the design of the car, decreasing the weight and frontal area, reducing thetransmission losses, altering the gear ratios for a more flat torque curve. Having a flat torqueensures a good acceleration and mileage for the car. It is also ensured that the entitled customerneeds are met at the same time.
Using interpolation intermediate values are predicted which shows the performance ofthe car. Linear interpolation and Newton’s interpolating polynomial is used to find unknownvalue. This helps in the study of the behavior of the car. This can also be used as an optimizationtechnique to alter the response the car provides.
As an example BMW 740li petrol variant is used. The matlab coding would be able topredict the unknown value, which can be used to predict the performance of the vehicle. This canbe used to optimize the performance for particular predicted values. The code has been createdfor newton’s interpolating polynomial function.

6
The weight of a car influences fuel consumption and performance, with more weightresulting in increased fuel consumption and decreased performance. Most automobiles in usetoday are propelled by an internal combustion engine, fueled by deflagration of gasoline (alsoknown as petrol) or diesel.
Data
The various dimensions of the car in mm are taken. These determine the weight of the carand also the aerodynamic drag of the car. The drag increases with the increase in the velocity andacceleration.
Fig. 1. Vehicle Design Data of BMW 740li – Petrol variant
The BMW 7 Series is a line of full-size luxury vehicles produced by the Germanautomaker BMW. Introduced in 1977, it is BMW's flagship car and is only available as a sedanor extended-length limousine. The 7 Series traditionally introduces technologies and exteriordesign themes before they trickle down to smaller sedans in BMW's lineup.[1]
ENGINEDisplacement 2979ccStroke & bore 89.6 mm & 84.0 mmMax. Power 240kw @5800rpmMax. Torque 450 Nm @1500-4500 rpmTRANSMISSION Six speed automaticGear ratios I Gear 4.17

7
II Gear 2.34III Gear 1.52IV Gear 1.4V Gear 0.87VI Gear 0.69
Final drive ratio 3.73CHASSISLength 5072mmWidth 1902 mmHeight 1479mmGround clearance 144mmFrontal area 2.41m2
Gross weight limit 2475 kgKerb weight 1860 kg
Table. 1. Car specifications
Formulas for calculation [5]
The rated rpm is the rpm at which the vehicle is supposed to run at all times. Therefore rated rpmis taken into consideration for all calculation purposes.
Nmin= 800 to 1000 rpm
Nmax= 1.1 Nrated (1.0)
Nrated = 6380 rpm
Brake power is the power output of the drive shaft of an engine without the power loss caused bygears, transmission, friction, etc. It's called also pure power, useful power, true power or wheelpower as well as other terms.[2]
B.P. = B.P.rated
2
1ratedratedrated NN
NN
NN kW (2.0)
Equivalent torque is the torque that is obtained at particular brake power to the rpm.
Equivalent torque (Te) =N
BP26000 Nm (3.0)
Force (F) =rGT Te N (4.0)
Velocity (V) =65.2
GrN (5.0)

8
Air Resistance
This is due to the frontal area of the car. Improving aerodynamics can reduce this effect.In aerodynamics, aerodynamic drag is the fluid drag force that acts on any moving solid body inthe direction of the fluid free stream flow. From the body's perspective (near-field approach), thedrag comes from forces due to pressure distributions over the body surface and forces due to skinfriction, which is a result of viscosity. The drag force comes from three natural phenomena:shock waves, vortex sheet, and viscosity. [4]
Ra = KaAV2 (6.0)
Rolling Resistance
Resistance due to the friction caused by the tires on the road because of the weight of thecar. Rolling resistance decreases with velocity. Rolling resistance, sometimes called rollingfriction or rolling drag, is the force resisting the motion when a body (such as a ball, tire, orwheel) rolls on a surface. It is mainly caused by non-elastic effects; that is, not all the energyneeded for deformation (or movement) of the wheel, roadbed, etc. is recovered when thepressure is removed. Another cause of rolling resistance lies in the slippage between the wheeland the surface, which dissipates energy. In analogy with sliding friction, rolling resistance isoften expressed as a coefficient times the normal force. [4]
Rr = (0.015+0.00016V) W (7.0)
Total Resistance
It represents the sum of the rolling resistance and air resistance.
Rt = Ra+Rr (8.0)
We= (1.04 + 0.0025 G2) W (9.0)
A =e
T
WRFg )( (10.0)
Methodology
Linear interpolation, Newton’s Interpolating polynomial and Splines are used to estimatethe value of the unknown point. These methods are for fitting a curve to the unknown point.
Linear Interpolation
The simplest form of interpolation is to connect two data points with a straight line. Thenotation f1(x) designates that this is a first order interpolating polynomial. Besides representing

9
the slope of the line connecting the points, the term [f(x1) – f(x0)]/(x1 – x0) is a finite divideddifference.approximation of the first derivative. For better approximation smaller intervalbetween data points are to be taken. A continuous function will be better approximated by astraight line. ( ) = ( ) + ( ) ( ) ( − ) (11.0)
General form of Newton’s Interpolating Polynomial
Newton's formula is of interest because it is the straightforward and natural differences-version of Taylor's polynomial. Taylor's polynomial tells where a function will go, based on its yvalue, and its derivatives (its rate of change, and the rate of change of its rate of change, etc.) atone particular x value. Newton's formula is Taylor's polynomial based on finite differencesinstead of instantaneous rates of change. With the Newton form of the interpolating polynomial acompact and effective algorithm exists for combining the terms to find the coefficients of thepolynomial.[3]
For any given finite set of data points, there is only one polynomial, of least possibledegree, that passes through all of them. To fit nth-order polynomial n + 1 data points areconsidered. The nth-order polynomial is [6]( ) = + ( − ) + ⋯+ ( − )( − )… ( − ) (12.0)
Data points can be used to evaluate the coefficients b0, b1,…, bn. Data points are used to evaluatethe coefficients:
b0 = f (x0)
b1 = f [x1, x0]
b2 = f [x2, x1, x0]
.
.
bn = f [xn, xn-1,…., x1, x0]
For nth divided difference
[ , , … , , ] = [ , ,…, ] [ , ,..., ] (13.0)

10
Results and discussion
Using the equations 1 to 10 and the values from the Table. 1. Car specifications,Tractive force (F), Velocity (V), Total Resistance (Rt) and Acceleration (A) are calculated.
Table. 2. Tractive force and Velocity
NBP
TeI
IIIII
IVV
VII
IIIII
IVV
VI220
.0000
9.4357
409.77
07153
53.407
2861
5.5810
5596.4
458515
4.6211
3203.2
288254
0.4918
1.8834
3.3562
5.1668
5.6097
9.0271
11.382
0440
.0000
19.483
3423
.0601
15851.
3374
8894.9
951577
7.9455
5321.7
919330
7.1136
2622.8
8323.7
6676.7
12510.
3337
11.219
418.
0542
22.764
0880
.0000
41.100
4446
.2260
16719.
3248
9382.0
671609
4.3342
5613.2
026348
8.2044
2766.5
0707.5
33413.
4249
20.667
322.
4388
36.108
445.
5280
1100.0
00052.
5126
456.10
26170
89.381
9958
9.7251
6229.2
231573
7.4424
3565.4
106282
7.7394
9.4168
16.781
225.
8342
28.048
545.
1355
56.910
0132
0.0000
64.222
5464
.8415
17416.
8146
9773.4
643634
8.5751
5847.3
718363
3.7239
2881.9
19011.
3001
20.137
431.
0010
33.658
254.
1627
68.292
0154
0.0000
76.151
5472
.4428
17701.
6230
9933.2
848645
2.3901
5942.9
909369
3.1444
2929.0
45513.
1835
23.493
636.
1678
39.267
963.
1898
79.674
0176
0.0000
88.221
0478
.9065
17943.
80691
0069.1
866654
0.6682
6024.2
997374
3.6720
2969.1
19115.
0668
26.849
941.
3347
44.877
672.
2169
91.056
1198
0.0000
100.35
24484
.2326
18143.
36651
0181.1
697661
3.4094
6091.2
981378
5.3067
3002.1
39816.
9502
30.206
146.
5015
50.487
381.
2440
102.43
81220
0.0000
112.46
71488
.4211
18300.
30181
0269.2
341667
0.6136
6143.9
862381
8.0486
3028.1
07518.
8335
33.562
351.
6683
56.097
090.
2711
113.82
01242
0.0000
124.48
66491
.4720
18414.
61261
0333.3
797671
2.2808
6182.3
639384
1.8976
3047.0
22220.
7169
36.918
656.
8352
61.706
799.
2982
125.20
21264
0.0000
136.33
22493
.3852
18486.
29901
0373.6
067673
8.4112
6206.4
313385
6.8538
3058.8
84022.
6002
40.274
862.
0020
67.316
4108
.3253
136.58
41286
0.0000
147.92
54494
.1609
18515.
36111
0389.9
149674
9.0045
6216.1
884386
2.9171
3063.6
92824.
4836
43.631
067.
1688
72.926
1117
.3524
147.96
61308
0.0000
159.18
76493
.7989
18501.
79881
0382.3
044674
4.0610
6211.6
351386
0.0875
3061.4
48726.
3670
46.987
372.
3357
78.535
8126
.3795
159.34
81330
0.0000
170.04
02492
.2993
18445.
61211
0350.7
752672
3.5804
6192.7
715384
8.3651
3052.1
51628.
2503
50.343
577.
5025
84.145
6135
.4066
170.73
01352
0.0000
180.40
46489
.6621
18346.
80111
0295.3
272668
7.5630
6159.5
975382
7.7499
3035.8
01630.
1337
53.699
782.
6693
89.755
3144
.4337
182.11
21374
0.0000
190.20
22485
.8873
18205.
36561
0215.9
606663
6.0086
6112.1
132379
8.2418
3012.3
98632.
0170
57.056
087.
8361
95.365
0153
.4609
193.49
41396
0.0000
199.35
45480
.9749
18021.
30581
0112.6
752656
8.9172
6050.3
185375
9.8408
2981.9
42733.
9004
60.412
293.
0030
100.97
47162
.4880
204.87
61418
0.0000
207.78
28474
.9249
17794.
6216
9985.4
711648
6.2889
5974.2
135371
2.5470
2944.4
33835.
7837
63.768
498.
1698
106.58
44171
.5151
216.25
81440
0.0000
215.40
86467
.7372
17525.
3130
9834.3
483638
8.1237
5883.7
981365
6.3603
2899.8
71937.
6671
67.124
7103
.3366
112.19
41180
.5422
227.64
01462
0.0000
222.15
33459
.4120
17213.
3801
9659.3
068627
4.4215
5779.0
724359
1.2807
2848.2
57139.
5504
70.480
9108
.5035
117.80
38189
.5693
239.02
21484
0.0000
227.93
82449
.9491
16858.
8227
9460.3
466614
5.1824
5660.0
364351
7.3083
2789.5
89441.
4338
73.837
1113
.6703
123.41
35198
.5964
250.40
42506
0.0000
232.68
49439
.3486
16461.
6410
9237.4
676600
0.4063
5526.6
900343
4.4431
2723.8
68743.
3171
77.193
4118
.8371
129.02
32207
.6235
261.78
62528
0.0000
236.31
47427
.6105
16021.
8349
8990.6
700584
0.0933
5379.0
333334
2.6850
2651.0
95045.
2005
80.549
6124
.0040
134.63
29216
.6506
273.16
82550
0.0000
238.74
90414
.7348
15539.
4044
8719.9
536566
4.2433
5217.0
662324
2.0340
2571.2
68447.
0838
83.905
8129
.1708
140.24
26225
.6777
284.55
02572
0.0000
239.90
93400
.7215
15014.
3496
8425.3
185547
2.8564
5040.7
888313
2.4902
2484.3
88848.
9672
87.262
1134
.3376
145.85
23234
.7048
295.93
22594
0.0000
239.71
70385
.5706
14446.
6704
8106.7
647526
5.9326
4850.2
011301
4.0535
2390.4
56250.
8505
90.618
3139
.5045
151.46
20243
.7319
307.31
42616
0.0000
238.09
34369
.2821
13836.
3667
7764.2
921504
3.4718
4645.3
030288
6.7240
2289.4
70852.
7339
93.974
5144
.6713
157.07
17252
.7591
318.69
62638
0.0000
234.96
00351
.8559
13183.
4387
7397.9
009480
5.4741
4426.0
945275
0.5016
2181.4
32354.
6173
97.330
8149
.8381
162.68
14261
.7862
330.07
82
Tractiv
e Force
(F)Vel
ocity (V
)

11
Fig. 2. Velocity Vs Force
The Fig. 2. shows the velocity produced at every gear because of the force which results due tothe torque produced by the engine which in turn is a result of the brake horse power generated bythe Internal combustion engine. The following Table. 3. represents the acceleration of the vehicleafter considering the resistance that is caused due to air and rolling of the vehicle.
0.0000
2000.0000
4000.0000
6000.0000
8000.0000
10000.0000
12000.0000
14000.0000
16000.0000
18000.0000
20000.0000
0.0000 50.0000 100.0000 150.0000 200.0000 250.0000 300.0000 350.0000
Forc
e
Velocity
I gear
II gear
III gear
IV gear
V gear
VI gear

12
Table. 3. Total Resistance (Rt) and Acceleration (A)
III
IIIIV
VVI
III
IIIIV
VVI
0.265
00.8
416
1.994
52.3
510
6.088
09.6
787
37.00
4649
.4536
54.32
2054
.9425
57.07
3657
.5992
1.060
03.3
662
7.977
99.4
041
24.35
2138
.7147
38.20
2851
.0549
56.08
1056
.7215
58.92
1659
.4642
4.240
013
.4649
31.91
1537
.6165
97.40
8315
4.859
040
.2872
53.84
0559
.1408
59.81
6362
.1364
62.70
876.6
249
21.03
8949
.8617
58.77
5815
2.200
524
1.967
241
.1734
55.02
4860
.4417
61.13
2063
.5032
64.08
809.5
399
30.29
6071
.8009
84.63
7221
9.168
734
8.432
741
.9555
56.07
0161
.5899
62.29
3364
.7096
65.30
5512
.9849
41.23
6297
.7290
115.2
006
298.3
130
474.2
557
42.63
3756
.9764
62.58
5463
.3002
65.75
5566
.3611
16.95
9953
.8596
127.6
461
150.4
661
389.6
333
619.4
360
43.20
7857
.7437
63.42
8264
.1527
66.64
1067
.2547
21.46
4868
.1660
161.5
520
190.4
336
493.1
297
783.9
736
43.67
8058
.3719
64.11
8464
.8507
67.36
6167
.9865
26.49
9884
.1556
199.4
470
235.1
032
608.8
021
967.8
687
44.04
4158
.8612
64.65
5865
.3943
67.93
0868
.5564
32.06
4810
1.828
224
1.330
828
4.474
973
6.650
511
71.12
1144
.3062
59.21
1565
.0406
65.78
3468
.3351
68.96
4338
.1597
121.1
840
287.2
036
338.5
486
876.6
750
1393
.7309
44.46
4359
.4228
65.27
2666
.0182
68.57
8969
.2104
44.78
4714
2.222
933
7.065
439
7.324
410
28.87
5516
35.69
8144
.5183
59.49
5165
.3520
66.09
8568
.6623
69.29
4651
.9396
164.9
449
390.9
161
460.8
023
1193
.2520
1897
.0226
44.46
8459
.4283
65.27
8766
.0243
68.58
5369
.2169
59.62
4518
9.350
144
8.755
752
8.982
213
69.80
4621
77.70
4644
.3145
59.22
2665
.0527
65.79
5768
.3478
68.97
7267
.8395
215.4
383
510.5
842
601.8
642
1558
.5333
2477
.7438
44.05
6558
.8778
64.67
4165
.4127
67.95
0068
.5757
76.58
4424
3.209
657
6.401
767
9.448
317
59.43
8027
97.14
0543
.6945
58.39
4164
.1427
64.87
5367
.3917
68.01
2385
.8593
272.6
641
646.2
082
761.7
344
1972
.5187
3135
.8946
43.22
8657
.7714
63.45
8764
.1834
66.67
3067
.2870
95.66
4330
3.801
672
0.003
684
8.722
621
97.77
5534
94.00
6042
.6586
57.00
9662
.6219
63.33
7265
.7939
66.39
9810
5.999
233
6.622
379
7.787
994
0.412
824
35.20
8338
71.47
4841
.9846
56.10
8961
.6325
62.33
6464
.7543
65.35
0711
6.864
137
1.126
187
9.561
110
36.80
5126
84.81
7142
68.30
0941
.2065
55.06
9160
.4904
61.18
1363
.5544
64.13
9612
8.259
040
7.313
096
5.323
311
37.89
9529
46.60
2046
84.48
4540
.3245
53.89
0359
.1956
59.87
1762
.1940
62.76
6714
0.183
944
5.183
010
55.07
4512
43.69
6032
20.56
2951
20.02
5439
.3385
52.57
2657
.7481
58.40
7760
.6732
61.23
1915
2.638
848
4.736
111
48.81
4613
54.19
4535
06.69
9955
74.92
3738
.2484
51.11
5856
.1479
56.78
9258
.9920
59.53
5216
5.623
752
5.972
412
46.54
3614
69.39
5038
05.01
2960
49.17
9337
.0544
49.52
0154
.3950
55.01
6357
.1503
57.67
6617
9.138
656
8.891
713
48.26
1515
89.29
7741
15.50
2065
42.79
2435
.7563
47.78
5352
.4895
53.08
9055
.1482
55.65
6119
3.183
561
3.494
214
53.96
8417
13.90
2444
38.16
7170
55.76
2834
.3542
45.91
1550
.4313
51.00
7352
.9857
53.47
3720
7.758
465
9.779
715
63.66
4318
43.20
9147
73.00
8275
88.09
0532
.8481
43.89
8748
.2203
48.77
1150
.6628
51.12
9422
2.863
370
7.748
416
77.34
9019
77.21
8051
20.02
5481
39.77
5731
.2380
41.74
6945
.8567
46.38
0548
.1795
48.62
32
Tota
l Res
istan
ce (R
t)Ac
celer
ation
(A)

13
Fig. 3. Velocity Vs Acceleration
Fig. 4. Engine Speed Vs Torque
0.0000
10.0000
20.0000
30.0000
40.0000
50.0000
60.0000
70.0000
80.0000
0.0000 50.0000 100.0000 150.0000 200.0000 250.0000 300.0000 350.0000
Acce
lera
tion
Velocity
I gear
II gear
III gear
IV gear
V gear
VI gear
0.0000
100.0000
200.0000
300.0000
400.0000
500.0000
600.0000
0 1000 2000 3000 4000 5000 6000 7000
Torq
ue
Engine Speed
Torque

14
Fig. 5. Engine Speed Vs Brake power
Interpolation for Velocity and Force
x0 1.8834 f(x0) 15353.4072x1 54.6173 f(x1) 13183.4387x 30.1337 f(x) 14190.9242
Table. 4. Linear Interpolation Points
b0 15353.4072b1 105.9419b2 0.0207
x 31f2(x) 18438.5988
Table. 5. Newton’s Interpolating Points
0.0000
50.0000
100.0000
150.0000
200.0000
250.0000
300.0000
0 1000 2000 3000 4000 5000 6000 7000
Brak
e Po
wer
Engine Speed
Brake Power
x0 1.8834 f(x0) 15353.4072x1 30.1337 f(x1) 18346.2990x2 54.6173 f(x2) 13183.4387

15
Fig. 6. Linear and Newton’s Interpolation for Velocity Vs Force
Interpolation for Velocity and Acceleration
x0 1.8834 f(x0) 37.0046x1 54.6173 f(x1) 31.2380x 43.2286 f(x) 32.48336918
Table. 6. Linear Interpolation Points
x0 1.8834 f(x0) 37.0046 b0 37.0046x1 30.1337 f(x1) 44.0565 b1 0.249622x2 54.6173 f(x2) 31.2380 b2 -0.0439x 31
f2(x) 43.1655
0.0000
2000.0000
4000.0000
6000.0000
8000.0000
10000.0000
12000.0000
14000.0000
16000.0000
18000.0000
20000.0000
0 10 20 30 40 50 60
Forc
e
Velocity
Linear
Newton’s InterpolatingPolynomial
Table. 7. Newton’s Interpolating Points
16
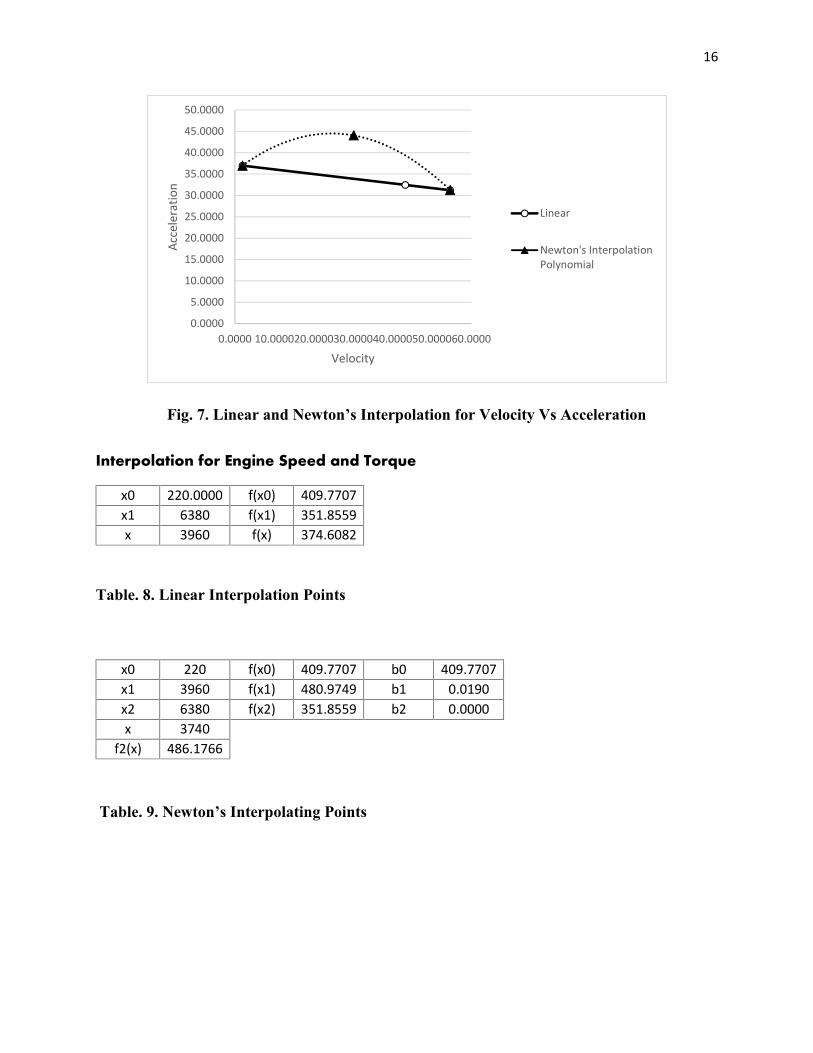
Fig. 7. Linear and Newton’s Interpolation for Velocity Vs Acceleration
Interpolation for Engine Speed and Torque
x0 220.0000 f(x0) 409.7707x1 6380 f(x1) 351.8559x 3960 f(x) 374.6082
Table. 8. Linear Interpolation Points
x0 220 f(x0) 409.7707 b0 409.7707x1 3960 f(x1) 480.9749 b1 0.0190x2 6380 f(x2) 351.8559 b2 0.0000x 3740
f2(x) 486.1766
0.0000
5.0000
10.0000
15.0000
20.0000
25.0000
30.0000
35.0000
40.0000
45.0000
50.0000
0.0000 10.000020.000030.000040.000050.000060.0000
Acce
lera
tion
Velocity
Linear
Newton's InterpolationPolynomial
Table. 9. Newton’s Interpolating Points

17
Fig. 8. Linear and Newton’s Interpolation for Engine Speed Vs Torque
Interpolation for Engine Speed and Brake Power
x0 220 f(x0) 9.4357x1 6380 f(x1) 234.9600x 3960 f(x) 146.3611
Table. 10. Linear Interpolation Points
x0 220 f(x0) 9.4357x1 3960 f(x1) 199.3545x2 6380 f(x2) 234.9600b0 9.4357b1 0.0508b2 0.0000x 4180
f2(x) 205.5938
0.0000
100.0000
200.0000
300.0000
400.0000
500.0000
600.0000
0.0000 1000.0000 2000.0000 3000.0000 4000.0000 5000.0000 6000.0000 7000.0000
Torq
ue
Engine Speed
Linear Interpolation
Newtons's Interpolation
Table. 11. Newton’s Interpolating Points

18
Fig. 9. Linear and Newton’s Interpolation for Engine Speed Vs Brake Power
Linear Splines
With the help of mat lab code it is identified that the second order polynomials do notcapture the curvature between the data points of range 4000 to 7000 with respect to EngineSpeed. We therefore involve Linear Splines to interpolate and predict those values. Thefollowing equations are for the first-order splines.( ) = ( ) + ( − ) ≤ ≤ (14.0)( ) = ( ) + ( − ) ≤ ≤ (15.0)
.
.( ) = ( ) + ( − ) ≤ ≤ (16.0)
Where mi is the slope and is given as,= ( ) ( ) (17.0)
0.0000
50.0000
100.0000
150.0000
200.0000
250.0000
0 1000 2000 3000 4000 5000 6000 7000
Brak
e Po
wer
Engine Speed
Linear Interpolation
Newton's Interpolating Polynomial

19
x f(x) Slope m4180 207.7828 7.2444994400 215.4086 6.4234954620 222.1533 5.5220124840 227.9382 4.5402975060 232.6849 3.4785555280 236.3147 2.336965500 238.749 1.1156575720 239.9093 -0.185235940 239.717 -1.565596160 238.0934 -3.025346380 234.96
x 5280f(x) 997.9671
Table. 12. Linear Spline Interpolation Points
Fig. 10. Linear Splines for Engine Speed Vs Brake Power
Quadratic Splines
Although Linear Splines could capture some curvature, Quadratic splines was able tocapture more curvature and result in an better prediction of the curve. For the n+1 = 11 pointsconsidered there are n=10 intervals. This implies there are 3n = 30 Unknowns. The 29 constantshave been solved using the four conditions of Quadratic splines method. Quadratic method hasfour conditions which are as follows,
200
210
220
230
240
250
0 1000 2000 3000 4000 5000 6000 7000
Brak
e Po
wer
Engine Speed
Linear Splines
20
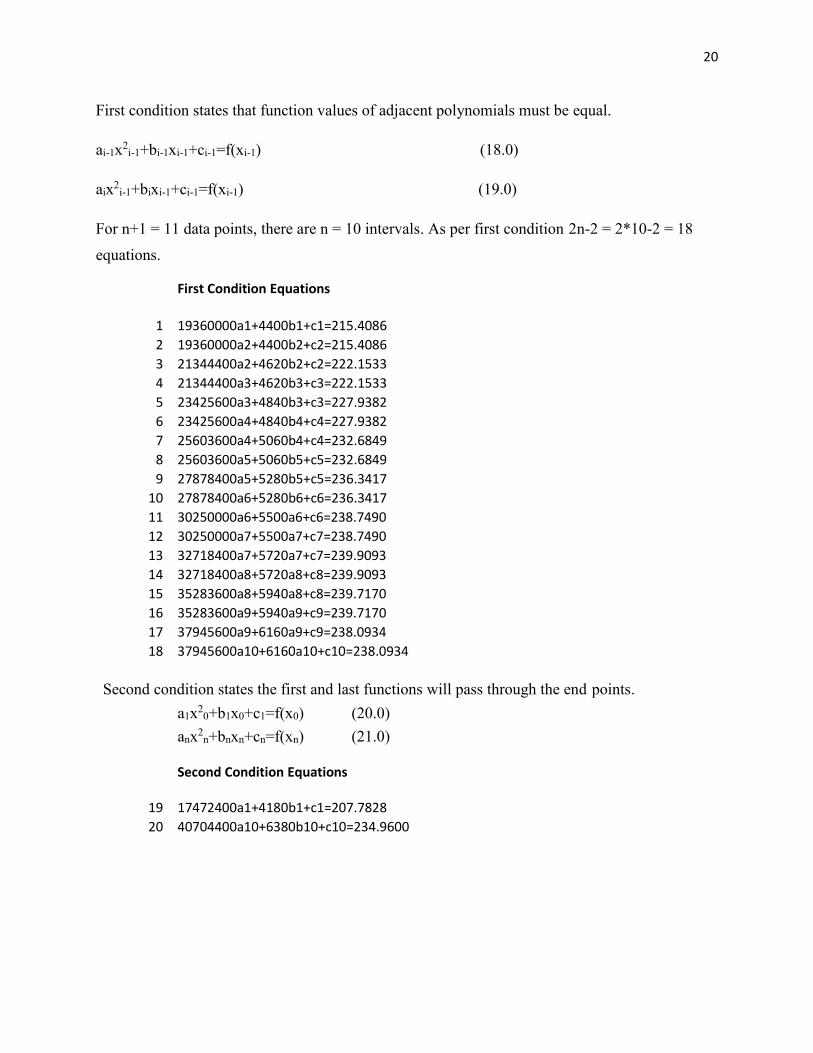
First condition states that function values of adjacent polynomials must be equal.
ai-1x2i-1+bi-1xi-1+ci-1=f(xi-1) (18.0)
aix2i-1+bixi-1+ci-1=f(xi-1) (19.0)
For n+1 = 11 data points, there are n = 10 intervals. As per first condition 2n-2 = 2*10-2 = 18equations.
First Condition Equations
1 19360000a1+4400b1+c1=215.40862 19360000a2+4400b2+c2=215.40863 21344400a2+4620b2+c2=222.15334 21344400a3+4620b3+c3=222.15335 23425600a3+4840b3+c3=227.93826 23425600a4+4840b4+c4=227.93827 25603600a4+5060b4+c4=232.68498 25603600a5+5060b5+c5=232.68499 27878400a5+5280b5+c5=236.3417
10 27878400a6+5280b6+c6=236.341711 30250000a6+5500a6+c6=238.749012 30250000a7+5500a7+c7=238.749013 32718400a7+5720a7+c7=239.909314 32718400a8+5720a8+c8=239.909315 35283600a8+5940a8+c8=239.717016 35283600a9+5940a9+c9=239.717017 37945600a9+6160a9+c9=238.093418 37945600a10+6160a10+c10=238.0934
Second condition states the first and last functions will pass through the end points.a1x20+b1x0+c1=f(x0) (20.0)anx2n+bnxn+cn=f(xn) (21.0)
Second Condition Equations
19 17472400a1+4180b1+c1=207.782820 40704400a10+6380b10+c10=234.9600

21
Third Condition21 8800a1+b1=8800a2+b222 9240a2+b2=9240a3+b323 9680a3+b3=9680a4+b424 10120a4+b4=10120a5+b525 10560a5+b5=10560a6+b626 11000a6+b6=11000a7+b727 11440a7+b7=11440a8+b828 11880a8+b8=11880a9+b929 12320a9+b9=12320a10+b10
Fourth Condition30 a1=0
b1 0.0347 b6 0.2602c1 62.8926 c6 -492.8935a2 0.0000 a7 0.0000b2 0.1949 b7 0.0349c2 -289.5474 c7 126.6065a3 0.0000 a8 0.0000b3 0.0417 b8 0.2942c3 64.3110 c8 -614.8303a4 0.0000 a9 0.0000b4 0.2178 b9 0.0443c4 -361.9962 c9 127.3646a5 0.0000 a10 0.0000b5 0.0445 b10 -0.0149c5 76.5977 c10 327.9301a6 0.0000
Table. 13. Quadratic Spline coefficients values
Third condition is that first derivatives at the interior knots must be equal
fi(x) = aix2+bix+ci (22.0)
f `(x)=2ax+b (23.0)
2ai-1xi-1+bi-1= 2aixi-1+bi (24.0)

22
The value of these constants are used to find the unknown function value between the 10intervals. There by optimization of the values is done.
x f(x)4180 207.7827974400 215.408586
x1 4300f(x1) 211.9423b1 0.0347c1 62.8926
Table. 14. Quadratic Spline Interpolation Points
Fig. 11. Quadratic Splines for Engine Speed Vs Brake Power
207.0000
208.0000
209.0000
210.0000
211.0000
212.0000
213.0000
214.0000
215.0000
216.0000
4150 4200 4250 4300 4350 4400 4450
Brak
e Po
wer
Engine Speed
Quadratic Interpolation

23
Analysis
In all the analysis graphs drawn it is observed that the Newton’s polynomial methodapproximates much better than the linear interpolation. The reason why the mat lab code wasbased on the Newton’s method. This implies that the Lagrange interpolation also yields the sameresult, as it is just the reformulation of the Newton’s method. Cubic splines are not useful asNewton’s method and Quadratic Splines could capture all the curvature required in the problem.
With the help of the mat lab code prediction for various parameters is possible. Let usconsider an example of how the predicted value affects the design. For gears III, IV, V, VI weare able to predict that acceleration values coincide for a particular range between 10 to 100(m/s), this can be used to further update the vaue of the gear ratio. There by we are directlyaltering the mechanical design of the component. Similarly we can alter the various designparameters of the car by altering the predicted values.
Appendices
Mat lab code
The code uses nested ‘for’ loop for calculating the Newton’s interpolating method topredict the value. The x and f(x) values for various gear values are given. Switch loop is used toselect the particular gear. Then for respective gear ratio the force and velocity values areselected. Then the code calculates coeffiecients b0,b1,…,bn. Then the interpolating methodformula is calculated and the resulting values are provided.
format long;k= input ('Enter the gear number between 1 to 6:');switch k
case 1x1= input('Enter a value between 2 and 50:');x= [0 1.8834 3.7667 7.5334 9.4168 11.3001 13.1835 15.0668 16.9502
18.8335 20.7169 22.6002 24.4836 26.3670 28.2503 30.1337 32.0170 33.900435.7837 37.6671 39.5504 41.4338 43.3171 45.2005 47.0838 48.9672 50.850552.7339 54.6173];
fx=[0 15353.4072 15851.3374 16719.3248 17089.3819 17416.814617701.6230 17943.8069 18143.3665 18300.3018 18414.6126 18486.2990 18515.361118501.7988 18445.6121 18346.8011 18205.3656 18021.3058 17794.6216 17525.313017213.3801 16858.8227 16461.6410 16021.8349 15539.4044 15014.3496 14446.670413836.3667 13183.4387];
case 2x1= input('Enter a value between 3 and 97:');

24
x= [0 3.356232866 6.712465731 13.42493146 16.78116433 20.1373971923.49363006 26.84986293 30.20609579 33.56232866 36.91856152 40.2747943943.63102725 46.98726012 50.34349299 53.69972585 57.05595872 60.4121915863.76842445 67.12465731 70.48089018 73.83712304 77.19335591 80.5495887883.90582164 87.26205451 90.61828737 93.97452024 97.3307531];
fx=[0 8615.580994 8894.995091 9382.067137 9589.725085 9773.4643169933.284831 10069.18663 10181.16971 10269.23408 10333.37973 10373.6066610389.91487 10382.30437 10350.77516 10295.32722 10215.96057 10112.675219985.471122 9834.348322 9659.306806 9460.346573 9237.467623 8990.6699578719.953575 8425.318476 8106.76466 7764.292128 7397.90088];
case 3x1= input('Enter a value between 5 and 149:');x= [0 5.166832175 10.33366435 20.6673287 25.83416087 31.00099305
36.16782522 41.3346574 46.50148957 51.66832175 56.83515392 62.001986167.16881827 72.33565045 77.50248262 82.6693148 87.83614697 93.0029791598.16981132 103.3366435 108.5034757 113.6703078 118.83714 124.0039722129.1708044 134.3376365 139.5044687 144.6713009 149.8381331];
fx=[0 5596.4458 5777.9455 6094.3342 6229.2231 6348.5751 6452.39016540.6682 6613.4094 6670.6136 6712.2808 6738.4112 6749.0045 6744.06106723.5804 6687.5630 6636.0086 6568.9172 6486.2889 6388.1237 6274.42156145.1824 6000.4063 5840.0933 5664.2433 5472.8564 5265.9326 5043.47184805.4741];
case 4x1= input('Enter a value between 5 and 162:');x= [0 5.6097 11.2194 22.4388 28.0485 33.6582 39.2679 44.8776 50.4873
56.0970 61.7067 67.3164 72.9261 78.5358 84.1456 89.7553 95.3650 100.9747106.5844 112.1941 117.8038 123.4135 129.0232 134.6329 140.2426 145.8523151.4620 157.0717 162.6814];
fx=[0 5154.6211 5321.7919 5613.2026 5737.4424 5847.3718 5942.99096024.2997 6091.2981 6143.9862 6182.3639 6206.4313 6216.1884 6211.63516192.7715 6159.5975 6112.1132 6050.3185 5974.2135 5883.7981 5779.07245660.0364 5526.6900 5379.0333 5217.0662 5040.7888 4850.2011 4645.30304426.0945];
case 5x1= input('Enter a value between 9 and 261:');x= [0 9.0271 18.0542 36.1084 45.1355 54.1627 63.1898 72.2169 81.2440
90.2711 99.2982 108.3253 117.3524 126.3795 135.4066 144.4337 153.4609162.4880 171.5151 180.5422 189.5693 198.5964 207.6235 216.6506 225.6777234.7048 243.7319 252.7591 261.7862];
fx=[0 3203.2288 3307.1136 3488.2044 3565.4106 3633.7239 3693.14443743.6720 3785.3067 3818.0486 3841.8976 3856.8538 3862.9171 3860.08753848.3651 3827.7499 3798.2418 3759.8408 3712.5470 3656.3603 3591.28073517.3083 3434.4431 3342.6850 3242.0340 3132.4902 3014.0535 2886.72402750.5016 ];
case 6x1= input('Enter a value between 11 and 330:');x=[0 11.3820 22.7640 45.5280 56.9100 68.2920 79.6740 91.0561 102.4381
113.8201 125.2021 136.5841 147.9661 159.3481 170.7301 182.1121 193.4941204.8761 216.2581 227.6401 239.0221 250.4042 261.7862 273.1682 284.5502295.9322 307.3142 318.6962 330.0782];
fx=[0 2540.4918 2622.8832 2766.5070 2827.7394 2881.9190 2929.04552969.1191 3002.1398 3028.1075 3047.0222 3058.8840 3063.6928 3061.4487

25
3052.1516 3035.8016 3012.3986 2981.9427 2944.4338 2899.8719 2848.25712789.5894 2723.8687 2651.0950 2571.2684 2484.3888 2390.4562 2289.47082181.4323];
otherwise
disp('Enter a value between 1 to 6');
end
b=[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];y=[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];f=[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];b(2)=fx(2);
b(3)=(fx(3)-b(2))/(x(3)-x(2));
for n=4:29
b(n)=(((fx(n)-fx(n-1))/(x(n)-x(n-1)))-b(n-1))/(x(n)-x(2));
end
for g=28:-1:1
x2=x1-x(2);
for j=3:g
x2=(x1-x(j))*x2;
end
y(g)=b(g+1)*x2;
end
f= sum(y);c= f + fx(2);disp('The predicted value is:')disp(c)format long;
Solution:
>> analysis
Enter the gear number between 1 to 6:1

26
Enter a value between 9 and 261:7.5334
The predicted value is:1.6719324800000000e+4
The switch case asks for the user to select the gear ratio for which the unknown valueis to be found. Then depending on the users choice, the x and f(x) value are selected for furthercalculation. The first for loop calculates the coefficients b0, b1,…, bn.
Then the nested for loop calculates the (x-x0)……(x-xn-1) value for the respective nvalue. Which is then multiplied with the bn value. The results are stored in the ‘ f ’ vector. Thenit is added to b0. Then the predicted value is displayed by the code.
The resulting value can be used to change the performance of the vehicle by makingdifference in the design values. The design change implementation can be done by adjusting thegear ratios, reducing the weight of the car, reducing the frontal area, reducing the drag on the car.Increasing the output torque of the engine, reducing the number of moving components or thefriction between them will improve the performance of the car.
The code could be useful for other cars with similar engine and gear train capacity. Thiscode can be extended to other type of cars by varying the different parameters althought the coreof the code for newtons interpolation remains the same.
Conclusion
Thus the predicted values can be used as a design criteria for changing the variousparameters that affect the performance of the car. The values of force and velocity varies uponthe given specification of engine. These formulas suite only for a petol engine car. For dieselengines other parameters have to be considered.
The different types of interpolation methods provides various results based on thecurvature of the curve. The matlab code can be used for automating the predicted values by usingdifferent parameters in the switch loop. The scope of the project is to extend the coding andautomate the process of designing the car through which optimization of the performance of thecar can be easily done.
27
References
[1]. "2011 BMW 5-series / 535i - Second Drive - Auto Reviews". Car and Driver. Retrieved2010-10-15.
[2]. http://urcar-engine.blogspot.com/2011/06/indicated-power-and-brake-power.html
[3]. "An Advantage of the Newton Form of the Interpolating Polynomial", Peck, William Guy(1859). Elements of Mechanics: For the Use of Colleges, Academies, and High Schools. A.S.Barnes & Burr: New York. p. 135. Retrieved 2007-10-09.
[4]. Anderson, John D. Jr., Introduction to Flight
[5]. Design of Automotive Engines, A.Kolchin and V.Domidov
[6]. Numerical Methods for Engineeres 6th Edition by Steven C.Chapra and Raymond P. Canale





























