-
8/12/2019 engineering science-2 .docx
1/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
1
ACKNOWLEDGEMENT
First of all, I would like to thank my parents for their massive
support and guidance to
complete this assignment and also I would like to thank Dr.
T.S.S.Jayawardene, who is
who is our assessor lecturer of Engineering Science for the
first semester in BTEC HND
in Engineering for guiding us to do this assignment. In addition
I would thankful to all of
my friends and specially Mr. Rushantha and Mr. Mahesh who were
there with me when I
need them.
-
8/12/2019 engineering science-2 .docx
2/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
2
CONTENT
Introduction 03
Bending movements and diagrams 04
Task 1 07
Task 2 13
Task 3 20
Task 4 22
Task 5 32
Task 6 40
Reference list 45
-
8/12/2019 engineering science-2 .docx
3/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
3
INTRODUCTION
This assignment briefly describes about static engineering
systems and DC-AC theory. In task 1,
task 2 and task 3 questions based on static engineering system
and these tasks included aboutbending movements, shear forces,
bending movement diagrams, shear force diagrams, how to
identify and draw deflected shapes and how to calculate maximum
bending stress.
And in task 4, task 5 and task 6 based on DC-AC theory. These
tasks are included V c and i c ,
waveforms and speed control devices.
-
8/12/2019 engineering science-2 .docx
4/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
4
CREATE BENDING MOVEMENT DIAGRAMS
The shear force diagram of the above example looks like
below:
step-1:Get the Reaction Forces: While creating shear force
diagram of the beam you
already have calculated the vertical reaction forces at
different points as below:
Rc = 60 KN
Re = -20 KN
These reaction forces will be useful for calculating the bending
moments at different
points on the beam.
-
8/12/2019 engineering science-2 .docx
5/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
5
Step-3: Calculate the Bending Moments: You need to calculate the
bending moments
at the different points on the beam. For calculating the bending
moment you need to start
from the extreme left (point A) and gradually you have to
approach toward right handside support (point A). You will use the
following formula for calculating bending
moment:
Bending moment (M) = (Force)X (Distance between the point of
application of the
force and the point at which you need to calculate bending
moment)
Bending moment @ A:
Ma = -20 * 0
= 0
Bending moment @ B:
Mb = -20 * 1
=20 KN-M
Bending moment @ C:
Mc = bending moment due to the 20KN force + bending moment due
to the 10KN\M
UDL
=20 * (1+1)(10*1*0.5)
=45 KN-M
Bending moment @ D:
Md = bending moment due to the 20KN force + bending moment due
to the 10KN \M UDL + bending moment due to the reaction force
Rc
=20 * (1+1+1)(10*2X1) + (60*1)
= -20 KN-M
Bending moment @ E:
Me = bending moment due to the 20KN force + bending moment due
to the 10KN \
M UDL + bending moment due to the reaction force Rc
=20 * (1+1+1+1)(10*2X2) + (60*2)
-
8/12/2019 engineering science-2 .docx
6/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
6
= 0
Step-4: Plot the Bending Moments:Just now you have calculated
the bending moment
values at different points of the beam, now plot the values and
you will get the bendingmoment diagram like below:
-
8/12/2019 engineering science-2 .docx
7/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
7
TASK 1
For the beam shown in the figure below, sketch the deflected
shape, draw to scale
the shear force diagram and draw to scale the bending movement
diagram. Label all
maximum and minimum values on your shear force and bending
movementdiagrams.
4m 5m 5m 6m
A BC
D
70kN10kN/m 5kN m
4m 2.5m 2.5m
70kN50kN 30kN
A B C D
5m 6m
P Q
-
8/12/2019 engineering science-2 .docx
8/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
8
Taking movements at B:
;(from (1) )
Then we have to find out bending movements and shear forces for
5 sections. Because
forces are acting on 5 locations.
Section 1
* +
, -
Where (4 9)When
-
8/12/2019 engineering science-2 .docx
9/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
9
When
Section 2
Where (9 )When
When
-
8/12/2019 engineering science-2 .docx
10/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
10
Section 3
Where (14 )
When
When
-
8/12/2019 engineering science-2 .docx
11/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
11
Shear Force Diagram
X (m) V (kN)
0 0
4 63.59 13.5
9 -56.5
14 -56.5
14 30
20 0
-80
-60
-40
-20
0
20
40
60
80
0 5 10 15 20 25
Shearforce(kN)
Distance x (m)
-
8/12/2019 engineering science-2 .docx
12/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
12
Bending Movement Diagram
x (m)
M
(kN/m)
0 0
4 0
9 192.5
14 -90
20 0
-150
-100
-50
0
50
100
150
200
250
0 5 10 15 20 25
BendingmomentM(
kN/m
)
DIstance x(m)
-
8/12/2019 engineering science-2 .docx
13/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
13
TASK 2
A beam with T cross-section is subject to design loads shown in
the following figure. If
the maximum compressive stress of the beam is limited to 50
Nmm2and the maximum
tensile stress to 10 N/mm2, calculate the maximum bending stress
of the beam at all
possible locations and check whether the beam will fall.
We have to find out movement of inertia (I) and center of
gravity of the T section. For
that we have to calculate the mass, x and y .
According to the figure, 0x .
= uniform density of the section
Object mass
= b1d1=
2
1
2
dd
y
d
b
b
d
x
b1d1
-
8/12/2019 engineering science-2 .docx
14/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
14
( ) ( )
, -
Movement of inertia can be found from the parallel axis
theorem.
Neutral axis
= b2d2=
2
2d
= (b1d1+ b2d2) =
b2
d2
b2
d2
d1
b1
301.89mm
=118.11mm
=111.89mm
-
8/12/2019 engineering science-2 .docx
15/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
15
Then we have to find out the maximum bending movement.
=118.11mm
x x
=111.89mm
10kN 10kN11.25 kN/m
8m5m 5m
10kN 10kN11.25 kN/m
-
8/12/2019 engineering science-2 .docx
16/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
16
Taking movements at B:
;(from (1) )
Then we have to find out bending movements for 5 sections (AB,
BC, CD).
Section 1
When (0 5)
x (m) M1(kN/m)0 0
1 -10
2 -20
3 -30
4 -40
5 -50
P Q
AB C
D
10kN
-
8/12/2019 engineering science-2 .docx
17/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
17
Section 2
When (5 13)
Section 2
Where (13 18)
x (m) M3(kN/m)
13 -50
14 -40
15 -30
16 -20
17 -10
18 0
x (m) M2(kN/m)
5 -50
6 -10.625
7 17.58 34.375
9 40
10 34.375
11 17.5
12 -10.625
13 -50
10kN
10kN
-
8/12/2019 engineering science-2 .docx
18/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
18
From this chart we can find out the maximum bending
movement.
Maximum bending movement is = 40 kN/m
Upper section of T section is subjected to tension and the lower
section of T section is
subjected to compression.
Maximum tensile stress can be found by:
-60
-40
-20
0
20
40
60
0 5 10 15 20
M(kN/m)
M(kN/m)
-
8/12/2019 engineering science-2 .docx
19/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
19
Maximum compressive stress can be found by:
.
-
8/12/2019 engineering science-2 .docx
20/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
20
TASK 3
A two feet long hollow steel shaft with an outer diameter of 2
inches and an inner
diameter of 1.5 inches is to transmit power while being driven a
3000rpm.
If the allowable shear stress in the shaft is 15000 lb/in2, what
is the maximum horsepower
which can be transmitted down the shaft.
()
( )
-
8/12/2019 engineering science-2 .docx
21/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
21
The maximum horse power can transmitted = 766.68
-
8/12/2019 engineering science-2 .docx
22/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
22
TASK 4
If (0) = 30v, t0, determine expressions for and for t 0 for the
circuitshown below,
1stWay
t =0;
t =1;
-
8/12/2019 engineering science-2 .docx
23/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
23
t =2;
t =3;
t =4;
-
8/12/2019 engineering science-2 .docx
24/46
-
8/12/2019 engineering science-2 .docx
25/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
25
t =9;
t =10;
0
5
10
15
20
25
30
35
0 2 4 6 8 10 12
Vc
Vc
time Vc
0 30
1 23.362 18.19
3 14.17
4 11.04
5 8.59
6 6.69
7 5.21
8 4.06
9 3.16
10 2.46
-
8/12/2019 engineering science-2 .docx
26/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
26
time ic
0 2.51 1.94
2 1.51
3 1.18
4 0.92
5 0.71
6 0.56
7 0.43
8 0.34
9 0.26
10 0.21
2nd
way
Appling K.V.L
0
0.5
1
1.5
2
2.5
3
0 2 4 6 8 10 12
ic
ic
-
8/12/2019 engineering science-2 .docx
27/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
27
For capacitors:
Differentiate:
Substituting values:
Let,
(where k1and k2 are constants)Differentiate:
+ Equaling constants:
-
8/12/2019 engineering science-2 .docx
28/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
28
Initial conditions ; t=0, Substituting initial conditions;
30=
Differentiate:
Let
Differentiate:
-
8/12/2019 engineering science-2 .docx
29/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
29
Equaling coefficients of ;
Equaling constants:
Initial conditions t=0, Substituting initial conditions:
Q=10
[ ]
-
8/12/2019 engineering science-2 .docx
30/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
30
T V
1 23.36
2 18.19
3 14.17
4 11.036
5 8.60
6 6.69
7 5.21
8 4.06
9 3.16
10 2.46
11 1.92
-
8/12/2019 engineering science-2 .docx
31/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
31
tci
1 -1.95
2 -1.51
3 -1.18
4 -0.92
5 -0.71
6 -0.56
7 -0.43
8 -2.20
9 -0.26
10 -0.21
11 -0.16
-
8/12/2019 engineering science-2 .docx
32/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
32
TASK 5
Often circuits are produce complex waveforms; show how theses
can be made up of
different sinusoidal signals. Give typical example for these
waveforms.
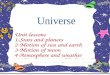
A basic sinusoid
As shown in the diagram, the amplitude is the difference between
the high value and the
low value. The waveform may have different units, depending upon
what the waveform
is. If the waveform is measuring a voltage as a function of
time, then the amplitude will
be in Volts; if it were current as a function of time, amplitude
would be in Amps. The
frequency is equal to and is a measure of how quickly the
waveform cycles. If the
waveform is a function of time, then frequency will usually be
measured in Hertz (Hz).
Since frequency is a measure of how rapidly the waveform cycles,
frequency is
sometimes (usually in older texts) given as cycles.
Making waves
Sine waves can be mixed with DC signals, or with other sine
waves to produce newwaveforms. Here is one example of a complex
waveform:
A waveform like this can be thought of as consisting of a DC
component with a
superimposcompon easy to separate these two components using a
capacitor.
http://en.wikibooks.org/wiki/File:Sinus_amplitude_ehttp://en.wikibooks.org/wiki/File:Sinus_amplitude_e
-
8/12/2019 engineering science-2 .docx
33/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
33
More dramatic results are obtained by mixing a sine wave of a
particular frequency with
exact multiples of the same frequency, (adding harmonics to the
fundamental frequency).
The V/t graphs below show what happens when a sine wave is mixed
with its 3rd
harmonic (3 times the fundamental frequency) at reduced
amplitude, and subsequently
with its 5th, 7th and 9th harmonics:
-
8/12/2019 engineering science-2 .docx
34/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
34
The Sinusoidal Waveform. (Horizontal time is in milliseconds,
vertical axis -5 to +5
volts)
Examples for waveforms.
Ocean waves
Sound waves
Light waves
Daily temperature(rough sinusoidal pattern
Each day of the yr.)
A cosine wave is said to be "sinusoidal", because cos(x) =
sin(x+ / 2),which is also asine wave with a phase-shift of /2.
There are three basic characteristics of sinusoidal waveforms
(hereafter sinusoids):
amplitude, frequency, and phase.
-
8/12/2019 engineering science-2 .docx
35/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
35
sine wave generator
D.C. stands for direct current i.e. the signal is always a fixed
value. A.C. signal
sources can be made up of different types of Waveforms. The most
common
waveforms are the
Sinusoidal waveform, the Square waveform and the Triangle
waveform. There is
other kind of A.C
waveforms which will be encountered as one becomes more involved
with
electronics.
An example of each of these A.C. waveforms is shown below :
-
8/12/2019 engineering science-2 .docx
36/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
36
There 3 are three types of wave forms that is The Square
Waveform and The
Triangle Waveform
-
8/12/2019 engineering science-2 .docx
37/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
37
The Sinusoidal Waveform.
The Sawtooth Wave form
Examples
Sine wave: sin (2 t). The amplitude of the waveform
followsatrigonometric sine function with respect to time.
Triangle wave: (t 2 floor ((t + 1) /2)) (1)floor ((t + 1)
/2)
. It containsoddharmonics that fall off at 12 dB/octave.
http://en.wikipedia.org/wiki/Sine_wavehttp://en.wikipedia.org/wiki/Sine_wavehttp://en.wikipedia.org/wiki/Trigonometryhttp://en.wikipedia.org/wiki/Triangle_wavehttp://en.wikipedia.org/wiki/Harmonichttp://en.wikipedia.org/wiki/Harmonichttp://en.wikipedia.org/wiki/Triangle_wavehttp://en.wikipedia.org/wiki/Trigonometryhttp://en.wikipedia.org/wiki/Sine_wave
-
8/12/2019 engineering science-2 .docx
38/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
38
Sawtooth wave:2 (t floor(t)) 1. This looks like the teeth of a
saw. Found oftenintime bases for display scanning. It is used as
the starting point forsubtractive
synthesis, as a sawtooth wave of constantperiod contains odd
and
evenharmonics that fall off at 6dB/octave.
http://en.wikipedia.org/wiki/Sawtooth_wavehttp://en.wikipedia.org/w/index.php?title=Time_base&action=edit&redlink=1http://en.wikipedia.org/wiki/Subtractive_synthesishttp://en.wikipedia.org/wiki/Subtractive_synthesishttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Harmonichttp://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Decibelhttp://en.wikipedia.org/wiki/Harmonichttp://en.wikipedia.org/wiki/Frequencyhttp://en.wikipedia.org/wiki/Subtractive_synthesishttp://en.wikipedia.org/wiki/Subtractive_synthesishttp://en.wikipedia.org/w/index.php?title=Time_base&action=edit&redlink=1http://en.wikipedia.org/wiki/Sawtooth_wave
-
8/12/2019 engineering science-2 .docx
39/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
39
A pulse wave or pulse train is a kind ofnon-sinusoidalwaveform
that is similar toasquare wave,but does not have the symmetrical
shape associated with a perfectsquare wave.
http://en.wikipedia.org/wiki/Non-sinusoidalhttp://en.wikipedia.org/wiki/Waveformhttp://en.wikipedia.org/wiki/Square_wavehttp://en.wikipedia.org/wiki/Square_wavehttp://en.wikipedia.org/wiki/Waveformhttp://en.wikipedia.org/wiki/Non-sinusoidal
-
8/12/2019 engineering science-2 .docx
40/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
40
TASK 6
For speed control device select individual components, you
should include product
details and specification. You should include details how you
are going to interface the
components and how you will monitor and check the performance of
the system.
The purpose of a motor speed controller is to take a signal
representing the demanded
speed, and to drive a motor at that speed. The controller may or
may not actually measure
the speed of the motor. If it does, it is called a Feedback
Speed Controller or Closed Loop
Speed Controller, if not it is called an Open Loop Speed
Controller..
Motors come in a variety of forms, and the speed controller's
motor drive output will bedifferent dependent on these forms. The
speed controller presented here is designed to
drive a simple cheap starter motor from a car. Below is a simple
block diagram of the
speed controller.
Theory of DC motor speed control
The speed controller works by varying the average voltage sent
to the motor. It could do
this by simply adjusting the voltage sent to the motor, but this
is quite inefficient to do. Abetter way is to switch the motor's
supply on and off very quickly. If the switching is fastenough, the
motor doesn't notice it, it only notices the average effect.
-
8/12/2019 engineering science-2 .docx
41/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
41
SCR or thyristor drive
SCR controls for DC motors convertACpower to direct current,
with adjustable voltage.
Small DC drives are common in industry, running from line
voltages, with motors ratedat 90V for 120V line, and 180V for a
240V line. Larger drives, up to thousands of
horsepower, are powered by three phase supplies and are used in
such applications asrolling mills,paper machines, excavators, and
ship propulsion. DC drivers are available
in reversing and non-reversing models. The waveform of the
current through the motor
by a single-phase drive will have strong ripple components due
to the switching at linefrequency. This can be reduced by use of a
polyphase supply or smoothing inductors in
the motor circuit; otherwise the ripple currents produce motor
heating, excess noise, and
loss of motor torque.
PWM or chopper drives
PWM controls use pulse width modulation to regulate the current
sent to the motor.Unlike SCR controls which switch at line
frequency, PWM controls produce smoother
current at higher switching frequencies, typically between 1 and
20 kHz. At 20 kHz, the
switching frequency is inaudible to humans, thereby eliminating
the hum whichswitching at lower frequency produces. However, some
motor controllers for radio
controlled models make use of the motor to produce audible
sound, most commonly
simple beeps.
A PWM controller typically contains a large reservoir capacitor
and an H-bridge
arrangement of switching elements (thyristors, Mosfets, solid
state relays, or transistors).
The speed controller works by varying the average voltage sent
to the motor. It could do
this by simply adjusting the voltage sent to the motor, but this
is quite inefficient to do. Abetter way is to switch the motor's
supply on and off very quickly. If the switching is fast
enough, the motor doesnt notice it, it only notices the average
effect.
http://en.wikipedia.org/wiki/Silicon-controlled_rectifierhttp://en.wikipedia.org/wiki/AChttp://en.wikipedia.org/wiki/Three_phasehttp://en.wikipedia.org/wiki/Steel_millhttp://en.wikipedia.org/wiki/Ripple_(electrical)http://en.wikipedia.org/wiki/Ripple_(electrical)http://en.wikipedia.org/wiki/Steel_millhttp://en.wikipedia.org/wiki/Three_phasehttp://en.wikipedia.org/wiki/AChttp://en.wikipedia.org/wiki/Silicon-controlled_rectifier
-
8/12/2019 engineering science-2 .docx
42/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
42
The amount of time that the voltage is on increases compared
with the amount of time
that it is off, the
average speed of the motor increases.
This on-off switching is performed by power MOSFETs. A MOSFET
(Metal-Oxide-
Semiconductor Field Effect Transistor) is a device that can turn
very large currents onand off under the control of allow signal
level voltage. For more detailed information, seethe dedicated
chapter on MOSFETs)
The time that it takes a motor to speed up and slow down under
switching conditions is
dependent on the inertia of the rotor (basically how heavy it
is), and how much frictionand load torque there is. The graph below
shows the speed of a motor that is being turned
on and off fairly slowly:
Inductors
An inductor or a reactor is a passive electrical component that
can store energy in a
magnetic field created by theelectric current passing through
it. An inductor's ability tostore magnetic energy is measured by
its inductance, in units of henries. Typically an
inductor is a conducting wire shaped as a coil, the loops
helping to create a strong
magnetic field inside the coil due to Ampere's Law.Due to the
time-varying magnetic
field inside the coil, a voltage is induced, according
toFaraday's law of electromagnetic
induction,which byLenz's Law opposes the change in current that
created it. Inductors
are one of the basic electronic components used in electronics
where current and voltage
change with time, due to the ability of inductors to delay and
reshape alternating currents.
In everyday speak inductors are sometimes called chokes, but
this refers to only a
particular type and purpose of inductor
Choosing a frequency based on motor characteristics
One way to choose a suitable frequency is to say, for example,
that we want the currentwaveform to be stable to within p percent.
Then we can work out mathematically the
minimum frequency to attain this goal. This section is a bit
mathematical so you may
wish to miss it out and just use the final equation.
The following shows the equivalent circuit of the motor, and the
current waveform as the
PWM signal switches on and off. This shows the worst case, at
50:50 PWM ratio, and the
current rise is shown for a stationary or stalled motor, which
is also worst case.
http://en.wikipedia.org/wiki/Passive_componenthttp://en.wikipedia.org/wiki/Electronic_componenthttp://en.wikipedia.org/wiki/Energyhttp://en.wikipedia.org/wiki/Magnetic_fieldhttp://en.wikipedia.org/wiki/Electric_currenthttp://en.wikipedia.org/wiki/Inductancehttp://en.wikipedia.org/wiki/Henry_(unit)http://en.wikipedia.org/wiki/Ampere%27s_Lawhttp://en.wikipedia.org/wiki/Faraday%27s_law_of_inductionhttp://en.wikipedia.org/wiki/Faraday%27s_law_of_inductionhttp://en.wikipedia.org/wiki/Lenz%27s_Lawhttp://en.wikipedia.org/wiki/Lenz%27s_Lawhttp://en.wikipedia.org/wiki/Faraday%27s_law_of_inductionhttp://en.wikipedia.org/wiki/Faraday%27s_law_of_inductionhttp://en.wikipedia.org/wiki/Ampere%27s_Lawhttp://en.wikipedia.org/wiki/Henry_(unit)http://en.wikipedia.org/wiki/Inductancehttp://en.wikipedia.org/wiki/Electric_currenthttp://en.wikipedia.org/wiki/Magnetic_fieldhttp://en.wikipedia.org/wiki/Energyhttp://en.wikipedia.org/wiki/Electronic_componenthttp://en.wikipedia.org/wiki/Passive_component
-
8/12/2019 engineering science-2 .docx
43/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
43
T is theswitching period, which is the reciprocal of the
switching frequency. Just
taking the falling edge of the current waveform, this is given
by the
equation(shown follow of tha paragraph) is the time constant of
the circuit,
which is L / R.
So the current at time t = T/2 (i1) must be no less than P%
lower than at t = 0 (i0).
This means there is a limiting condition:
-
8/12/2019 engineering science-2 .docx
44/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
44
Speed control circuits
We will start off with a very simple circuit (see the figure
below). The inductance of thefield windings and the armature
windings have been lumped together and called La. The
resistance of the windings and brushes is not important to this
discussion, and so has not
been drawn.
Q1 is the MOSFET. When Q1 is on, current flows through the field
and armaturewindings, and the motor rotates. When Q1 is turned off
, the current through an inductor
cannot immediately turn off, and so the inductor voltage drives
a diminishing current inthe same direction, which will now flow
through the armature, and back through D1 as
shown by the red arrow in the figure below. If D1 wasnt in
place, a very large voltage
would build up across Q1 and blow it up.
-
8/12/2019 engineering science-2 .docx
45/46
Engineering Science - 02
HNDCV/MT/02/18 BTEC Higher National Diploma in Civil
EngineeringInternational College of Business and Technology Page
45
REFERENCE LIST
http://www.mechguru.com
http://mathworld.wolfram.com/TriangleWave.html
http://homepages.which.net/~paul.hills/SpeedControl/SpeedControllersBody.html
http://mathworld.wolfram.com/SquareWave.html
http://crca.ucsd.edu/~msp/techniques/latest/book-html/node24.html
Hanna, J and Hillier, M (1995) Mechanical Engineering Science.
Longman. ISBN0582326753
Bolton(2006).Engineering science.5thedn. Oxford.uk
http://www.mechguru.com/http://www.mechguru.com/http://mathworld.wolfram.com/TriangleWave.htmlhttp://mathworld.wolfram.com/TriangleWave.htmlhttp://homepages.which.net/~paul.hills/SpeedControl/SpeedControllersBody.htmlhttp://homepages.which.net/~paul.hills/SpeedControl/SpeedControllersBody.htmlhttp://mathworld.wolfram.com/SquareWave.htmlhttp://mathworld.wolfram.com/SquareWave.htmlhttp://crca.ucsd.edu/~msp/techniques/latest/book-html/node24.htmlhttp://crca.ucsd.edu/~msp/techniques/latest/book-html/node24.htmlhttp://crca.ucsd.edu/~msp/techniques/latest/book-html/node24.htmlhttp://mathworld.wolfram.com/SquareWave.htmlhttp://homepages.which.net/~paul.hills/SpeedControl/SpeedControllersBody.htmlhttp://mathworld.wolfram.com/TriangleWave.htmlhttp://www.mechguru.com/
-
8/12/2019 engineering science-2 .docx
46/46
Engineering Science - 02