Embed Size (px)
Citation preview

5Subset Simulation
In this chapter we discuss the Subset Simulation method for estimating the complementary
cumulative distribution function (CCDF) of a response quantity of interest of a system sub-
jected to uncertainties modeled by standard random variables or processes. The CCDF can
be used directly for estimating the failure probability that the response exceeds a specified
threshold. The samples of the random variables in a Subset Simulation run can also be used
for probabilistic failure analysis, which will be discussed in Chapter 6.
The idea behind Subset Simulation is quite simple and makes use of fundamental probability
logic, namely, conditional probability. The probability of a rare event is equal to the probability
that it happens given that a not-so-rare event has happened, multiplied by the probability of
the not-so-rare event. There are many ways in which one can make use of this idea to create
a variance reduction algorithm. For concreteness and instructional purpose we start with
the “standard algorithm” through which one can start building experience with the method.
Readers interested in an exposition of ideas of the method may refer to Section 2.7. The
standard algorithm is (hopefully) simple to implement. It has been found to be robust to
applications but still competitive in terms of efficiency. Details of the algorithm, issues, and
variants shall be discussed later after some familiarization. The method is not “foolproof.”
Despite the mathematical arguments that justify it, human intelligence and experience are still
needed to judge the validity of the simulation results. This seems to be inevitable for advanced
Monte Carlo methods that claim to be more efficient than Direct Monte Carlo.
5.1 Standard Algorithm
Let X = [X1,… , Xn] be the set of random variables that completely determines the scalar
response Y = h(X) whose complementary cumulative distribution function (CCDF) is to be
estimated:
FY (y) = P(Y > y) (5.1)
Without loss of generality, it is assumed that {X1,… , Xn} are independent, that is, with a
joint PDF
q(x) = q1(x1)⋯ qn(xn) (5.2)
Engineering Risk Assessment with Subset Simulation, First Edition. Siu-Kui Au and Yu Wang.
© 2014 John Wiley & Sons Singapore Pte. Ltd. Published 2014 by John Wiley & Sons Singapore Pte. Ltd.

158 Engineering Risk Assessment with Subset Simulation
An efficient method for generating i.i.d. samples and calculating the PDF value qi(xi) for
given xi is assumed to be available (Chapter 3).
Let the “level probability” p0 ∈ (0, 1) and the “number of samples per level” N be chosen
such that (with little loss of generality)
Nc = p0N (Number of chains) (5.3)
Ns = p−10
(Number of samples per chain) (5.4)
are positive integers. The reason behind this constraint will unfold shortly. Note that
NcNs = N (5.5)
As an example, one may take p0 = 0.1 and N = 500 so that Nc = 50 and Ns = 10.
The following is a standard procedure of Subset Simulation that estimates a sequence of
threshold values b corresponding to a set of predefined exceedance probabilities P(Y > b).
The result is an estimate of the CCDF of Y . The procedure starts from simulation level 0
(Direct Monte Carlo), followed by subsequent simulation levels 1,… , m − 1 (MCMC) that
provide information on the CCDF in regimes of decreasing probability. To avoid distrac-
tion, we omit the description of MCMC involved in levels 1 to m − 1. It can be found in
Section 4.5.2.
5.1.1 Simulation Level 0 (Direct Monte Carlo)
1. Generate samples {X(0)
k : k = 1,… , N} according to the parameter PDF q. Calculate the
corresponding values of response {Y (0)
k = h(X(0)
k ) : k = 1,… , N}.
2. Sort {Y (0)
k : k = 1,… , N} in ascending order to give the list {b(0)
k : k = 1,… , N}. The value
b(0)
k gives the estimate of b corresponding to the exceedance probability p(0)
k = P(Y > b)
where
p(0)
k = N − kN
k = 1,… , N (5.6)
Plotting {(b(0)
k , p(0)
k ) : k = 1,… , N − Nc} gives the CCDF estimate of Y with probability
ranging from (1 − N−1) to p0. The regime for probabilities below p0 shall be further
estimated by higher simulation levels.
3. Set
b1 = b(0)N−Nc
(5.7)
Let {X(1)
j0 : j = 1,… , Nc} be the Nc = p0N samples of X corresponding to {b(0)N−Nc+j : j =
1,… , Nc}. These samples are used as “seeds” for generating additional samples conditional
on F1 = {Y > b1} at simulation level 1.

Subset Simulation 159
5.1.2 Simulation Level i = 1,… , m − 1 (MCMC)
1. From each seed X(i)j0 (j = 1,… , Nc) from the last level (i − 1), use MCMC to generate
Ns = 1∕p0 conditional samples {X(i)jk : k = 1,… , Ns} with conditional PDF q(⋅|Fi); see
Section 4.5.2. This gives Nc Markov chains, each with Ns samples. The total number of
samples at Level i is still equal to N because NcNs = N. The seeds are discarded after use.
2. Let Y (i)jk = h(X(i)
jk ), which has been calculated during MCMC. Sort {Y (i)jk : j = 1,… , Nc; k =
1,… , Ns} in ascending order to give the list {b(i)k : k = 1,… , N}. The value b(i)
k gives the
estimate of b corresponding to exceedance probability p(i)k = P(Y > b) where
p(i)k = pi
0
N − kN
k = 1,… , N (5.8)
Plotting {(b(i)k , p(i)
k ) : k = 1,… , N − Nc} gives the CCDF estimate of Y with probability
ranging from pi0(1 − N−1) to pi+1
0. If i = m − 1 (the highest level), the values for k =
N − Nc + 1, N − Nc + 2,… , N should also be plotted to cover the probability range below
pm0
. This is because no further simulation level will be carried out to obtain a better estimate
of this probability regime.
3. Set
bi+1 = b(i)N−Nc
(5.9)
Let {X(i+1)
j0 : j = 1,… , Nc} be the Nc samples of X corresponding to {b(i)N−Nc+j : j =
1,… , Nc}. These samples are used as “seeds” for generating additional samples condi-
tional on Fi+1 = {Y > bi+1} at the next simulation level (i + 1). Omit this step if i = m − 1
(the highest level).
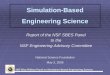
Figure 5.1 gives a graphical illustration of the procedure. Note that in Figure 5.1c, a sample
at Level 1 lies on the failure boundary F1; and it is not a typo. Even if the seeds at the boundary
of F1 from Level 0 have not been kept for Level 1, it is still possible for the next sample at
Level 1 generated from them to be identical when the candidate is rejected during MCMC.
Example 5.1 Sample accountingTo illustrate how the samples are processed, suppose N = 10 and p0 = 0.2 so that Nc = p0N =2, Ns = 1∕p0 = 5 and N − Nc = 8. This means that at each simulation level there are 2 Markov
chains, each with 5 samples, giving a total of 10 samples at the level. At Level 0 suppose the
samples are {X(0)
1,X(0)
2,… ,X(0)
10} whose responses Y are{
Y (0)
k : k = 1,… , 10}= {3, 6, 5, 1, 2, 0, − 3, 4, 22, 12}
Arranging these in ascending order gives{b(0)
k : k = 1,… , 10}= {−3, 0, 1, 2, 3, 4, 5, 6, 12, 22}

160 Engineering Risk Assessment with Subset Simulation
Direct Monte Carlo First threshold level
Markov Chain Monte Carlo
Direct Monte Carlo
(a) (b)
(c) (d)
Random variable space )( bYP > 10X
Responsevalue b
1F1b
)( bYP > 10Random variable spaceX
Responsevalue b
Markov Chain Monte Carlo
)( bYP > 10Random variable spaceX
Responsevalue b
1F1b
2F
2b
)( bYP > 10Random variable spaceX
Responsevalue b
1F1b
Second threshold level
Figure 5.1 Illustration of Subset Simulation. (a) Direct Monte Carlo; (b) first threshold level; (c)
Markov chain Monte Carlo; (d) second threshold level.
Then b1 = b(0)
8= 6. Since the value 12 corresponds to X(0)
10and the value 22 corresponds
to X(0)
9, the seeds for generating the samples conditional on F1 = {Y > 6} at Level 1 are
X(1)
1,0= X(0)
10and X(1)
2,0= X(0)
9.
At Level 1, one Markov chain will be generated from X(1)
1,0, giving {X(1)
1,1,X(1)
1,2,… ,X(1)
1,5};
and the other chain from X(1)
2,0, giving {X(1)
2,1,X(1)
2,2,… ,X(1)
2,5}. These samples are all conditional
on F1. The seeds X(1)
1,0and X(1)
2,0are then discarded.
5.2 Understanding the Algorithm
In this section we discuss some features and implementation details of the standard algorithm.
5.2.1 Direct Monte Carlo Indispensible
Subset Simulation starts with Direct Monte Carlo, where the samples are generated simply
according to the parameter PDF q without any conditioning. This step is indispensible because
the target probability always contains an unconditional probability term, no matter how one

Subset Simulation 161
breaks it into conditional probabilities. The unconditional samples provide information on
how likely the subsequent conditioning events are. This is an interesting philosophical point.
In the current context, knowing the information conditional on an event alone does not allow
one to determine the probability of such event.
As illustrated in Figure 5.1a, the majority of the unconditional samples cover the high
probability (frequent) regime of the CCDF curve and so they provide information for estimation
in such regime. There are only a small number of samples (or none) in the small probability
regime, reflecting the fact that the unconditional samples do not provide much information
there. It is not efficient to use them to explore such a regime, because on average only p0N of
the unconditional samples lie in the region with probability smaller than p0.
The objective of Level 0 is to provide reliable information at the probability level from
1 down to p0 rather than the target level pm0
. For this reason, only the CCDF curve from
probability 1 to p0 is plotted at this stage. The number of samples N should be much less than
that required when one directly estimates the probability at the target level, for otherwise no
advantage is gained from Subset Simulation.
5.2.2 Rare Regime Explored by MCMC
Starting from Level 1, the samples are all conditional on {Y > bi} (i = 1,… , m − 1) and
they are generated by MCMC. The conditional samples at Level i are aimed at providing
information for the CCDF curve for probability between pi0
to pi+10
. If a higher simulation
level is performed, the information about the regime with probability small than pi+10
will be
explored later. At the highest level m − 1, it relies on the relatively small number (Nc = p0N)
of samples to explore the regime with probability less than pm0
.
5.2.3 Stationary Markov Chain from the Start
The threshold level bi is determined from the samples generated at Level (i − 1). The samples
of X with Y > bi are distributed as the parameter PDF and are conditional on Fi = {Y > bi}.
These samples provide “seeds” for generating samples conditional on Fi by means of MCMC.
Since the seeds are already distributed as the target stationary distribution, the same is also true
for the subsequent Markov chain samples. This means that the MCMC samples are identically
distributed as the target conditional PDF q(x|Fi), not just asymptotically. The algorithm does
not have “burn-in” problems and there is no need to discard the first few Markov chain samples
to wait for stationarity. It is stationary right from the start.
5.2.4 Multiple Chains
From Level 1 onwards, the N samples generated by MCMC at the level consist of samples
from Nc Markov chains, each with Ns samples. This “multi-chain” strategy is less vulnerable
to ergodic problems than generating a single chain of N samples from a single seed. When
the region giving significant contribution to the failure probability has different disconnected
regions, all samples generated from a single chain may be confined to the region in which
they are started if the spread of the proposal PDF is not large enough. The multi-chain strategy

162 Engineering Risk Assessment with Subset Simulation
allows the samples to be developed from different chains that are possibly from different
disconnected regions. See Section 4.4.3 for the concept of ergodicity and Section 5.4.2 for
related issues in Subset Simulation.
5.2.5 Seeds Discarded
The seeds {X(i)j0 : j = 1,… , Nc} for generating conditional samples at Level i are discarded
after use. This provides some convenience in sample accounting and analysis of the failure
probability estimate. It also reduces the correlation between the samples at different simulation
levels. Of course, the information from the seeds is wasted, although their number is small
compared to the total number of samples. The algorithm can be easily modified to incorporate
the seeds as conditional samples, so that at each level it is only required to generate (N − Nc)
rather than N new conditional samples. This has been conventionally done in the literature.
5.2.6 CCDF Perspective
The algorithm produces an estimate of the CCDF curve FY (b) = P(Y > b) covering the large
to small probability regimes, rather than just a point estimate for a given threshold level. In
each simulation run, the values of b corresponding to different fixed probability levels p(i)k =
pi0(N − k)∕N for i = 0,… , m − 1 and k = 1,… , N are generated. This is the same concept
used in the construction of CCDF estimate based on Direct Monte Carlo samples (Section
2.5.6).
5.2.7 Repeated Samples
Recall from Eq. (5.9) that at Level i, bi+1 is set as the N − Nc = (1 − p0)Nth value of the
ascending list {b(i)k : k = 1,… , N} so that the conditional probability of exceeding bi+1 is
approximately p0. The samples corresponding to {b(i)N−Nc+j : j = 1,… , Nc} are used as seeds
for the next level (i + 1) as it is anticipated that they are conditional on Y > bi+1. In reality, the
latter need not be true. For example, it is not necessary that bi+1 < b(i)N−Nc+1
. This is because
the values in the list {b(i)k : k = 1,… , N} need not be distinct, due to the rejection mechanism
in MCMC.
As an example, suppose N = 10 and at Level 2{b(2)
k : k = 1,… , 10}= {0.5, 1.2, 1.5, 2.3, 2.3, 2.3, 3.4, 5.6, 5.6, 6.1}
Then for p0 = 0.5, N − Nc = (1 − p0)N = 5, and so b3 = b(2)
5= 2.3. The samples accepted for
Level 3 are
{2.3, 3.4, 5.6, 5.6, 6.1}
The first sample in this set, 2.3, is equal to (instead of greater than) b3 =2.3.

Subset Simulation 163
At first glance it seems that setting bi+1 to be the maximum value among those smaller than
b(i)N−Nc+1
may ensure bi+1 < b(i)N−Nc+1
. Following the example above, from the set {b(2)
k : k =1,… , 5} = {0.5, 1.2, 1.5, 2.3, 2.3} if we confine ourselves to those less than b(2)
6= 2.3 then
we get {0.5, 1.2, 1.5}. Taking the maximum over this set gives b2 = 1.5. One can check that
this is less than b(2)
6, b(2)
7,… , b(2)
10. The strategy works in this example but it may still break
down when b(i)1
= b(i)2
= … = b(i)(1−p0)N , which can happen when rejection is frequent.
The issue discussed here is relevant from a sample accounting (coding) point of view, but
it makes little difference to the result for a proper simulation run with large N. When there
are a lot of repeated samples the results tend to be inaccurate and one should be concerned
about the ergodicity and the repeatability/representativeness of a single run of results (Section
5.4.2).
5.2.8 Uniform Conditional Probabilities
In the standard algorithm, it is targeted that
P(Y > b1) ≈ P(Y > b2|Y > b1) ≈ ⋯ ≈ P(Y > bm|Y > bm−1) ≈ p0 (5.10)
The same number of samples N is also used for each simulation level. These choices simplify
the algorithm and they are found to give a balance between simplicity, robustness, and effi-
ciency. It is possible to adopt different conditional probabilities and/or a different number of
samples for different simulation levels. An approximate analysis suggests that, in this case,
the choice of the level probabilities and the number of samples generally depends on the
correlation between the MCMC samples, which is unknown a priori.
Example 5.2 Subset simulation, basicConsider estimating the CCDF of Y = X1X2 where X1 and X2 are i.i.d. standard Gaussian.
Subset Simulation is performed with p0 = 0.1 and N = 500. This means that starting from
Level 1, there are Nc = p0N =50 chains, each with Ns = 1∕p0 =10 samples, making up a total
of 500 samples at each level. Suppose the smallest probability of interest is 10−6. This requires
m = 6 levels. The total number of samples in a single run is mN = 6 × 500 = 3000. The
proposal PDF is chosen as uniform distribution centered at the current sample with maximum
step length w = 1.
As a reference, it can be readily shown that the exact solution for b ≥ 0 is given by,
P(Y > b) = 2∫∞
0
Φ(−b
x
)𝜙(x)dx (5.11)
For b < 0, P(Y > b) = 1 − P(Y > |b|), which follows from the symmetry of the distribution
of Y about 0.
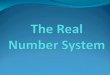
The generation of samples in Subset Simulation is illustrated in a sequence of plots in
Figure 5.2. Plot (a) shows the 500 samples (X1, X2) generated at Level 0. These are distributed
as the original parameter PDF, that is, standard Gaussian. The value of b1 is chosen as the
450th smallest value of Y among these samples, which gives b1 = 1.09. The top 50 samples

164 Engineering Risk Assessment with Subset Simulation
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(a) Level 0
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(b)
X1
X2
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(c) Level 1
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(d)
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(e) Level 2
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(f)
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(g) Level 3
-5 -2.5 0 2.5 5-5
-2.5
0
2.5
5
(h)
Figure 5.2 Population of samples at different simulation levels. Solid line – conditional boundary of
the current level; dashed line – conditional boundary of the next level. Plots at the top row (a, c, e, g)
show the samples at the current level. Plots at the bottom row (b, d, f, h) show the samples accepted as
seeds for generating the samples at the next level.
of X are shown in Figure 5.2b, where the dashed line shows the conditional boundary for
Level 1, that is, X1X2 > b1. From each of these samples a Markov chain of 10 samples will
be generated conditional on Level 1, giving a total of 500 samples. The latter are shown in
Figure 5.2c, where the conditional boundary X1X2 > b1 is now shown with a solid line. The
samples shown in Figure 5.2b, which have been used as seeds for Level 1, are discarded and
hence not shown in Figure 5.2c. Again, b2 is chosen as the 450th smallest value of Y among
the samples at Level 1, which gives b2 = 3.30. The top 50 samples of X are shown in Figure
5.2d, where the dashed line shows the conditional boundary for Level 3, that is, X1X2 > b2.
Figures 5.2e to 5.5h can be understood in the same way. The samples for Level 4 to 6 are
omitted here.
Figure 5.3a shows the CCDF estimate resulting from the samples. The dots show the
threshold Levels b1,… , b5. As a characteristic of Monte Carlo simulation, the result differs
from one simulation run to another. Figure 5.3b shows the results from three independent
runs. We shall discuss in the next section how to assess the estimation error using information
from a single run. Nevertheless, viewing the results from a few simulation runs (if affordable)
can help spot-check ergodic problems. Although not shown in the figure, these results are
close to the exact solution. Note that Direct Monte Carlo using the same number of samples
(3000) can only give estimates of the CCDF down to the smallest non-zero probability of
1∕3000 ≈ 3 × 10−4. The result is only reliable (say with 30% c.o.v.) for probabilities down to
10∕3000 ≈ 3 × 10−3.

Subset Simulation 165
-5 0 5 10 15 2010
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)(a)
-5 0 5 10 15 2010
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)
(b)
Figure 5.3 CCDF estimate, Example 5.2. (a) Single run with dots showing intermediate threshold
levels; (b) three independent runs.
Example 5.3 Brownian processLet B(t) be the standard Brownian process. Consider determining the probability that its
maximum value over the time window [0, T] exceeds a given threshold level b > 0, that is,
P(F) = P
(max
0≤s≤TB(s) > b
)(5.12)
To estimate this probability by Monte Carlo simulation, we divide [0, T] into n intervals and
approximate the process in discrete time (Section 3.9):
Bk =√Δt
k∑i=1
Xi k = 1, 2,… , n (5.13)
where Δt = T∕n is the time interval, Bk = B(kΔt) with B0 = 0, and {Xi : i = 1,… , n} are i.i.d.
standard Gaussian random variables. The maximum value of the process is then given by
Y = max0≤k≤n
Bk (5.14)
The failure probability is given by P(Y > b). Strictly speaking, P(Y > b) is only an approxi-
mation of P(max0≤s≤T B(s) > b) due to time discretization, although the difference is negligible
when Δt is sufficiently small.
For this problem an analytical solution is available:
P(F) = P
(max
0≤s≤TB(s) > b
)= 2Φ
(− b√
T
)(5.15)

166 Engineering Risk Assessment with Subset Simulation
0 1 2 3 4 5 610
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)
(a)
0 1 2 3 4 5 610
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)
(b)
Figure 5.4 CCDF estimate, Example 5.3. (a) Single run with dots showing intermediate threshold
levels; (b) three independent runs.
where Φ(⋅) denotes the standard Gaussian CDF. This result can be readily obtained as follows.
By the theorem of total probability,
P(B(T) > b) = P(B(T) > b|F)P(F) + P(B(T) > b|F)P(F) (5.16)
Clearly, P(B(T) > b|F) = 0. Also, P(B(T) > b|F) = 1∕2 since once the process hits the level
b before time T it is equally likely to be above or below b at time T. This is often known
as the “reflection principle.” Substituting these findings into Eq. (5.16) and rearranging gives
P(F) = 2P(B(T) > b). Equation (5.15) then follows, since B(T) is Gaussian with zero mean
and standard deviation√
T .
For a duration of T = 1 sec and n = 1000, Figures 5.4a and 5.4b show respectively the
results of a single run and three independent runs, in a manner similar to Figures 5.3a and
5.4b. The parameters are the same as before, that is, p0 = 0.1, N = 500.
5.3 Error Assessment in a Single Run
In this section we present the formulas that allow the error associated with the CCDF estimate
in Subset Simulation to be assessed using information in a single simulation run. A heuristic
argument is given that provides a quick, intuitive justification for their use so that they
can be correctly interpreted in applications. A formal mathematical proof is postponed until
Section 5.5.
Assuming that the MCMC process in Subset Simulation is ergodic (see Section 5.4.2), the
CCDF estimate produced by Subset Simulation is asymptotically unbiased and convergent as
N → ∞. For practical purposes, the c.o.v. of the CCDF estimate at the intermediate probability
levels may be assessed. The c.o.v. depends on the correlation among the MCMC samples within
a given level and across different levels. A direct formula for the c.o.v. that takes the latter
correlation into account has not been derived yet, but the c.o.v. can be approximately bounded.

Subset Simulation 167
The c.o.v. of the CCDF estimate at (bi, pi0) (i = 1,… , m) is approximately equal to the c.o.v.
of FY (bi)−1 (recall that {bi} are random). The latter is denoted by 𝛼i. It may be approximately
bounded as
𝛼(i)L < 𝛼i < 𝛼
(i)U (5.17)
where
𝛼(i)L =
(i∑
j=1
𝛿2j
)1∕2
(5.18)
𝛼(i)U =
(i∑
j=1
i∑k=1
𝛿j𝛿k
)1∕2
(5.19)
𝛿2j =
1 − p0
p0N(1 + 𝛾j) (5.20)
Here,
𝛾1 = 0
𝛾i = 2
Ns−1∑k=1
(1 − k
Ns
)𝜌i(k) i = 2,… , m
(5.21)
is a factor accounting for the correlation among the MCMC samples at Level (i − 1); 𝜌i(k) is
the correlation coefficient of samples along a chain at k steps apart, which can be estimated by
𝜌i(k) ≈ 1
p0(1 − p0)
[1
Nc(Ns − k)
[ Nc∑j=1
Ns−k∑r=1
I(
Y (i−1)j,r > bi
)I(
Y (i−1)
j,r+k > bi
)]− p2
0
](5.22)
5.3.1 Heuristic Argument
The error assessment formulas in Eq. (5.17) to Eq. (5.22) can be reasoned heuristically as
follows. Suppose the intermediate threshold levels {bi : i = 1,… , m} were fixed. Let p1 be
the estimate for p1 = P(Y > b1), equal to the fraction of samples at Level 0 with Y exceeding
b1. Similarly, let pj (j = 2,… , m) be the estimate for pj = P(Y > bj|Y > bj−1), equal to the
fraction of conditional samples at Level (j − 1) with Y exceeding bj. The estimate for P(Y > bi)
is then given by
Pi = p1p2 ⋯ pi (5.23)

168 Engineering Risk Assessment with Subset Simulation
5.3.1.1 Asymptotic Unbiasedness
We first argue that Pi is asymptotically unbiased. First note that {pj} are unbiased. If they
were also independent then Pi would be unbiased because then its expectation is simply equal
to the product of the expectations of {pj}. In general, {pj} are dependent because the Markov
chains at a given level are started from seeds selected from the last level. As the expectation
of the product of dependent random variables is generally not equal to the product of their
expectations, Pi is biased for finite N. However, it is asymptotically unbiased as N → ∞because the variance of {pj} diminishes in the limit.
5.3.1.2 Lower and Upper Bound c.o.v.
We next examine the c.o.v. of Pi. Take log on Eq. (5.23) and consider differentials. For small
random errors {Δp1,… ,Δpi}, the error ΔPi is given by
ΔPi
Pi≈
Δp1
p1
+Δp2
p2
+⋯ +Δpi
pi(5.24)
The squared c.o.v. of Pi is equal to the variance of ΔPi∕Pi. Similarly the squared c.o.v. of
pj is equal to the variance of Δpj∕pj. The squared c.o.v. of Pi can then be obtained by taking
variance on Eq. (5.24). If {pj} were independent, then the squared c.o.v. of Pi would be equal
to the sum of the variances of {Δpj∕pj}. This leads to the lower bound in Eq. (5.18) where 𝛿jin fact denotes the c.o.v. of pj. The upper bound in Eq. (5.19) corresponds to the other extreme
where {pj} were fully correlated.
5.3.1.3 Conditional Probability c.o.v.
The squared c.o.v. of the estimate for P(Y > b1) is approximately 𝛿21= (1 − p0)∕p0N because
the probability is p0 and the samples at Level 0 are independent, that is, Direct Monte Carlo.
The squared c.o.v. of the estimate for P(Y > bj|Y > bj−1) (j = 2,… , m) is 𝛿2j = (1 + 𝛾j)(1 −
p0)∕p0N, which is similar to 𝛿21
except for the factor 𝛾j that accounts for the correlation among
the MCMC samples at Level (j − 1). The expression for 𝛾j in Eq. (5.21) results from analysis
of the correlation along a stationary Markov chain with Ns samples, which has the same form
as the formula derived in Section 4.4.1. Equation (5.22) is the estimation formula for the
correlation coefficient at lag k, which is calculated based on averaging over the (Ns − k) pairs
of samples along each chain and then averaging over Nc chains at a given simulation level.
5.3.1.4 Heuristics
The argument presented above is (hopefully) simple and intuitive, providing a quick justi-
fication for the assessment formulas in Eq. (5.17) to Eq. (5.22). Section 5.5 gives a formal
mathematical justification for their use. To avoid misunderstanding, however, it is important
to clarify the heuristic nature of the argument used here.
First of all, in the Subset Simulation algorithm the intermediate threshold levels {bi} are not
fixed. Rather they are adaptively chosen as the N(1 − p0)th smallest value of the sample values
of Y at the previous simulation level. The probability estimate pi is therefore exactly equal to

Subset Simulation 169
p0 and so its variance is irrelevant (identically zero). On the other hand, if one assumes {bi}
to be fixed, as in the heuristic argument, then pi is now a random quantity and so its variance
is relevant. However, in this case the number of Markov chains at Level i (i ≥ 1), that is, Nc,
is random because the number of samples with Y exceeding the fixed threshold level bi−1 is
random. This means that if the number of samples Ns per chain is fixed, then the total number
of samples N at each level is random. Otherwise, Ns should be adjusted accordingly (and hence
be random) in order to keep the same number N. These complications render the heuristic
arguments inexact. Nevertheless, it still yields approximately the right asymptotic result for
large N because the variability of {bi} and other associated quantities diminishes in the limit.
5.3.2 Efficiency Over Direct Monte Carlo
To get an idea of the variance reduction that can be achieved by Subset Simulation, consider
the c.o.v. at the target probability level
pF = pm0
(5.25)
We shall obtain an expression for the c.o.v. 𝛿 in terms of pF and investigate its growth with
diminishing pF .
The lower bound c.o.v., denoted by 𝛼L, is given by Eq. (5.18):
𝛼2L =
m∑i=1
(1 − p0
p0N
)(1 + 𝛾i) =
(1 − p0
p0N
)(1 + 𝛾L)m (5.26)
where
𝛾L = 1
m
m∑i=1
𝛾i (5.27)
is approximately a constant of m. The upper bound c.o.v., denoted by 𝛼U , is given by Eq.
(5.19):
𝛼2U =
m∑i=1
m∑j=1
(1 − p0
p0N
)(1 + 𝛾i)
1∕2(1 + 𝛾j)1∕2 =
(1 − p0
p0N
)(1 + 𝛾U)m2 (5.28)
where
𝛾U = −1 + 1
m2
m∑i=1
m∑j=1
(1 + 𝛾i)1∕2(1 + 𝛾j)
1∕2 (5.29)
is also approximately a constant of m. Thus, in general we may write
𝛿2 =(
1 − p0
p0NT
)(1 + 𝛾)mr 2 ≤ r ≤ 3 (5.30)

170 Engineering Risk Assessment with Subset Simulation
where 𝛾 is roughly a constant of m; and
NT = mN (5.31)
is the total number of samples used. Taking logarithms on both sides of Eq. (5.25), the number
of simulation levels can be written as
m =ln p−1
F
ln p−10
(5.32)
where the choice of the log-base is arbitrary. Substituting Eq. (5.32) into Eq. (5.30), the c.o.v.
at the target probability level pF may be written as
𝛿2 =
[1 − p0
p0
(ln p−1
0
)r
][(ln p−1
F
)r(1 + 𝛾)
NT
]2 ≤ r ≤ 3 (5.33)
As a comparison, the c.o.v. of the Direct Monte Carlo estimator with the same number of
samples NT is given by
𝛿2MCS =
1 − pF
pFNT(5.34)
The scaling of the c.o.v. with small pF has important consequences on application of the
method to rare events. For Direct Monte Carlo, 𝛿2MCS ∝ p−1
F for small pF and so it grows
drastically with diminishing pF . For Subset Simulation, 𝛿2 ∝ (ln p−1F )r (2 ≤ r ≤ 3) increases
at a much slower rate as pF diminishes.
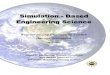
Example 5.4 Example 5.2 revisited with error assessmentConsider Example 5.2 again, where Y = X1X2; X1 and X2 are standard Gaussian. Recall that
Subset Simulation was performed for p0 = 0.1 and N = 500. Figure 5.5 shows the correlation
sequence estimated using the samples at each level in a single run. The result in Figure 5.5a
for Level 0 corresponds to the theoretical result for Direct Monte Carlo where the correlation
is identically zero and there is no need to estimate it. The plot is included only for contrast.
The value of 𝛾i in Eq. (5.21) is shown in each plot. The estimation errors associated with
the correlation at different lags are different because they are estimated by averaging over
a different number of terms. For example, the correlation at lag k = 1 is the average of
50 × 9 = 450 terms, while the correlation at lag k = 9 is the average of only 50 × 1 = 50
terms.
Using these values of {𝛾i}, the estimation error of the CCDF curve can be calculated.
The lower bound error is shown as +/– one c.o.v. error bar at the intermediate threshold
levels in Figure 5.6a, part of which is inherited from Figure 5.3a. The CCDF curve and
its estimation error in this figure are obtained based on a single run, involving a total of
500 × 6 = 3000 samples. These results differ from one run to another, although they can be
considered representative in a proper run with a sufficient number of samples. As a verification,
Figure 5.6b shows the ensemble average of the CCDF curve and the +/– one c.o.v. of b-values,

Subset Simulation 171
0 2 4 6 8
0
0.5
1
Level 0, γ1= 0
0 2 4 6 8
0
0.5
1
Level 1, γ2= 1.8
0 2 4 6 8
0
0.5
1
Level 2, γ3= 1.4
0 2
(a) (b) (c)
(d) (e) (f)
4 6 8
0
0.5
1
ρ(k)
Lag k
Level 3, γ4= 1.6
0 2 4 6 8
0
0.5
1
Level 4, γ5= 1.6
0 2 4 6 8
0
0.5
1
Level 5, γ6= 3
Figure 5.5 Correlation sequence estimated from a single run, Example 5.2. (a) – (f) for Levels 0 to 5,
respectively. Result for Level 0 (Direct Monte Carlo) is theoretical and is shown for contrast.
calculated based on 50 independent runs. The error bars in Figure 5.6a from a single run are
consistent with the error intervals in Figure 5.6b. The dashed lines in Figure 5.6b show the
+/– one c.o.v. of Direct Monte Carlo estimates with the same number of samples. With 3000
samples it can only give an estimate for non-zero probabilities down to 1∕3000 ≈ 3 × 10−4.
Note that in a typical application, one only produces the results in Figure 5.6a and not those
in Figure 5.6b.
-5 0 5 10 15 2010
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
(a)
b
P(Y
>b
)
-5 0 5 10 15 2010
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
(b)
b
P(Y
>b
)
Figure 5.6 Estimation error, Example 5.2. (a) +/– one c.o.v. error bar (lower bound) estimated from a
single run; (b) ensemble mean and +/– one c.o.v. of b values (solid lines), averaging from 50 runs; exact
solution (dotted line); Direct Monte Carlo (dashed line).

172 Engineering Risk Assessment with Subset Simulation
0 2 4 6 8
0
0.5
1
0 2 4 6 8
0
0.5
1
0 2 4 6 8
0
0.5
1
0 2 4 6 8
0
0.5
1
0 2 4 6 8
0
0.5
1
0 2 4 6 8
0
0.5
1
= 3
Level 0, γ1= 0 Level 1, γ2
= 0.75 Level 2, γ3= 1.3(a) (b) (c)
(d) (e) (f)
ρ(k)
Lag k
Level 3, γ4= 1.4 Level 4, γ5
= 1.6 Level 5, γ6= 3
Figure 5.7 Correlation sequence estimated from a single run, Example 5.3. (a)–(f) for Levels 0 to 5,
respectively. Plot for Level 0 (Direct Monte Carlo) is theoretical and is shown for contrast.
Example 5.5 Example 5.3 revisited with error assessmentFor Example 5.3 on Brownian process, discussed in Figure 5.4, the correlation sequence and
estimation errors are shown in Figures 5.7 and 5.8, respectively. They are analogous to Figures
5.5 and 5.6.
0 1 2 3
(a) (b)
4 5 610
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)
0 1 2 3 4 5 610
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)
Figure 5.8 Estimation error, Example 5.3. (a) +/– one c.o.v. error bar (lower bound) estimated from a
single run; (b) ensemble mean and +/– one c.o.v. of b values (solid lines), averaging from 50 runs; exact
solution (dotted line); Direct Monte Carlo (dashed line).

Subset Simulation 173
5.4 Implementation Issues
5.4.1 Proposal Distribution
In the standard algorithm the candidate is generated using the independent-component algo-
rithm as described in Section 4.5.2. This resolves the curse of dimension and allows MCMC to
be applicable even when the number of random variables is large. In this context, the efficiency
of the method is affected by the type of the one-dimensional proposal PDFs and the spread
around the current sample. Experience shows that the efficiency is relatively insensitive to
the type of the proposal PDF. Gaussian or uniform distribution have been commonly used for
their convenience. The spread may be characterized by the scale parameter w in Table 4.1 of
Section 4.2. Setting w of the same order as the standard deviation of the parameter PDF is
found to give a balance between efficiency and robustness. It may also be set in an adaptive
manner based on sample statistics calculated from the last level. For example, w may be taken
as the sample standard deviation of the p0N seeds from the last level.
5.4.2 Ergodicity
Ergodicity is an issue for simulation Levels 1 and above, which involve MCMC. As discussed
in Section 4.4.3, practically ergodicity is an issue of whether the Markov chain samples
can populate sufficiently well the important regions of the failure domain. If there is some
important region not visited by the samples, its contribution to the failure probability will not
be reflected in the estimate, which will then be significantly biased.
For a Markov chain started at a single point, ergodic problems may arise due to the existence
of disconnected failure regions that are separated by safe regions whose size is large compared
to the spread of the proposal PDF. For the Markov chain to transit from one failure region to
another, the candidate has to lie in the second failure region, but this is unlikely to happen if
the spread of the proposal PDF is small compared to the safe region between the two failure
regions. The situation of disconnected failure regions may arise, for example, in systems with
components connected in series. The above offers a geometric perspective of one potential
problem, although it may not be relevant in high-dimensional space.
Compared to a single chain, the multi-chain strategy adopted in Subset Simulation makes it
less vulnerable to ergodic problems arising from disconnected failure regions. Direct Monte
Carlo at Level 0 provides an ergodic population of i.i.d. samples that explores the frequent
region. The samples at Level 0 that are used as seeds for Level 1 can be expected to populate
F1 sufficiently well, for otherwise the variability of b1 will be large and subsequently the
variability of bm will not be acceptable as the errors accumulate. The seeds can possibly be
distributed among different important parts of F1, which could be disconnected. The Markov
chain initiated in each disconnected region will populate it at least locally, and so the population
of samples from different chains is likely to correctly account for their contribution. Of course
this implicitly assumes that unimportant failure modes at lower levels remain unimportant at
higher levels. Otherwise there may not be enough seeds (if any) at lower levels to develop more
samples to account for their contribution at higher levels. Increasing N helps avoid ergodic
problems in this respect. Failure events that “suddenly” become important at higher levels
without signs at lower levels give occasional “surprises” to simulation runs. These “black
swan events” are further discussed in Section 5.7.

174 Engineering Risk Assessment with Subset Simulation
The foregoing discussion suggests that Subset Simulation is likely to produce an ergodic
estimator, but it offers no guarantee. Whether ergodicity problems become an issue depends
on the particular application and the choice of the proposal PDF. Ergodicity and bias are
relevant in any simulation method which tries to conclude “global” information from some
known “local” information, assuming implicitly that the known local information dominates
the problem. For example, importance sampling using checkpoint(s) (Section 2.6.3) implicitly
assumes that the main contribution of failure probability comes from the neighborhood of the
known check points and there are no other regions of significant contribution. Otherwise the
estimate can be significantly biased. In view of this, one should appreciate the ergodic property
of Direct Monte Carlo.
5.4.3 Generalizations
In this subsection we discuss some possible generalizations to the standard algorithm, some
of which have been explored in the literature. These are presented to give an idea of some
possible modifications that can be introduced to the standard algorithm. The generalizations
need not improve the algorithm in terms of efficiency or robustness.
5.4.3.1 Keeping the Seeds
As mentioned in Section 5.2, it is possible to keep the seeds from the last level and use them
as the conditional samples for the current level instead of discarding them. This can be done
by setting the first sample of the Markov chain to be equal to the seed. The advantage is that it
is now only required to generate (Ns − 1) samples per chain, or N − Nc = (1 − p0)N MCMC
samples per level. The total number of samples (function evaluations) is then
NT = N + N(1 − p0)(m − 1) = N[1 + (1 − p0)(m − 1)] (5.35)
instead of mN. This is the strategy that has been used conventionally in the literature.
It should be noted, however, that keeping the seeds increases the correlation between the
samples at different levels and within the same level. This offsets the benefit from the saving
in samples. That is, for the same number of samples (function evaluations) the seed-keeping
strategy may lead to a similar c.o.v. in the failure probability estimate. Artificially uncorrelating
the samples at successive levels by “burn-in” samples does not solve the problem, because it
requires additional function evaluations whose number is equal to the number of seeds. Section
5.4.4 shows that if the c.o.v. formula based on the seed-keeping strategy is not interpreted
carefully, it may give misleading conclusions regarding the choice of p0.
5.4.3.2 More or Fewer Chains
In the standard algorithm, at a given level the number of Markov chains is always Nc = p0Nand the number of samples per chain is always Ns = 1∕p0. This choice stems naturally from
the fact that there are p0N samples from the last level that are conditional on the current level.
It is possible to generate more or fewer chains than p0N.
Here we discuss a simple strategy that assumes Nc = cp0N and Ns = 1∕p0c where c is a
multiplier; Nc and Ns are still integers. Note that NcNs = N and so the total number of samples

Subset Simulation 175
per level is still the same. The case of c = 1 corresponds to the standard algorithm. When
c > 1, the number of chains is greater than the number of seeds. In this case, each seed may be
(repeatedly) used for generating c chains, each with 1∕p0c samples. When c < 1, the number
of chains is less than the number of seeds. In this case, each Markov chain may be started with a
seed uniform randomly chosen from the p0N seeds so that their conditional nature is preserved.
Some comments regarding the effect of this generation are in order. Intuitively, having more
chains than p0N (i.e., c > 1) may help distributing the samples more evenly in the failure
region, compared to the standard algorithm. It may appear to give a smaller correlation factor
𝛾j in Eq. (5.21) by shortening the chain. However, in reality the effect is not straightforward
because now the correlation among the chains has increased as they are started with repeated
seeds; and this correlation has not been taken into account in Eq. (5.21). In fact, as the chains
are now shorter, the samples in an overall sense have a higher correlation with the seeds. This
increases the correlation between the samples among successive levels. Effectively the power
r in the c.o.v. formula Eq. (5.33) may increase.
On the other hand, having fewer chains than p0N (i.e., c < 1) may appear to increase the
factor 𝛾i in Eq. (5.21) by lengthening the chain. However, this can reduce the correlation
between successive levels because the samples in an overall sense are now more steps away
from the seeds. Effectively this may reduce the power r in Eq. (5.33) and hence increase
efficiency of the algorithm. Nevertheless, it should be borne in mind that reducing the number
of chains generally increases the risk of ergodic problems.
5.4.3.3 Relaxing Constraints on Level Probability
Recall that the level probability p0 is assumed to be chosen such that Nc = p0N and Ns = 1∕p0
are integers. These constraints are now clear, because Nc and Ns are respectively the number
of chains and the number of samples per chain. Requiring p0N to be an integer means that p0
is limited to the values {1∕N, 2∕N,… , (N − 1)∕N}. On the other hand, requiring 1∕p0 to be
an integer limits p0 to the possible values {1∕2, 1∕3,… , 1∕N}; in particular, p0 ≤ 1∕2.
One strategy to remove these constraints is to generate the MCMC samples always as one
step away from a seed uniform randomly chosen from the p0N seeds from the last level. This
gives as many chains as the number of samples generated at a given level, and each chain has
only one sample (seed excluded). As a large number of chains are started from the seeds, this
strategy may increase significantly the correlation between successive levels.
5.4.4 Level Probability
The level probability p0 controls how fast the simulation level progresses to reach the target
event of interest. A prudent choice trades off between the total number of levels m required to
reach the target event and the variability of intermediate threshold levels {bi}. Here we present
an approximate analysis to yield some insights on the optimal choice of p0 that minimizes the
c.o.v. 𝛿 of the target failure probability estimate at pF = pm0
.
From Eq. (5.33), 𝛿2 depends on p0 only through the first bracketed term, that is,
J(p0) =1 − p0
p0
(ln p−1
0
)r 2 ≤ r ≤ 3 (5.36)

176 Engineering Risk Assessment with Subset Simulation
Minimizing J yields the optimal value of p0. Since this term does not depend on pF , 𝛾 , or NT ,
the optimal choice of p0 in this context is invariant to these factors.
Setting the derivative of J to zero gives the following equation after simplification:
r(1 − p0) + ln p0 = 0 (5.37)
This can be rewritten in the standard form xex = y:
(−rp0)e(−rp0) = −re−r (5.38)
A real-valued unique solution of x to the equation xex = y always exists for y ≥ −1∕e and
is given by the zero-th branch of the Lambert W’s function x = W0(y) (Corless et al., 1996). A
plot of W0(y) versus y is shown in Figure 5.9.
In the current case, x = −rp0, y = −re−r ≥ −1∕e for 2 ≤ r ≤ 3 and so a unique solution
always exists. Consequently, the optimal value of p0 is given by
p∗0= −r−1W0(−re−r) (5.39)
To examine the sensitivity of 𝛿2 to p0, Figure 5.10a plots the value of J versus p0 for r =2, 2.25, 2.5, 2.75, 3. For comparison, the value of J for each r is normalized by its minimum
value so that the curves in the figure for different r all have the same minimum value of 1.
The optimal value of p0 for each r is shown with a dot. These values are also plotted in Figure
5.10b. As r increases from 2 to 3, the optimal value of p0 decreases from 0.2 to 0.06. This
trend suggests that when the correlation among different levels is higher, it is better to reduce
p0 and hence the number of chains.
From Figure 5.10a, the value of J(p0) varies over a narrow range when p0 is between 0.06
and 0.2. Thus, choosing p0 between these two values can lead to a reasonable efficiency. This
is worth noting because, in practice, the value of r is not known a priori. Using p0 = 0.2
(optimal for r = 2) when r = 3 only leads to about 17% increase in c.o.v. compared to the
optimal choice; using p0 = 0.06 (optimal for r = 3) when r = 2 leads to about a 13% increase.
-0.35 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0-1
-0.8
-0.6
-0.4
-0.2
0
y
W0(y
)
Figure 5.9 The zero-th branch of the Lambert W function.

Subset Simulation 177
0 0.2 0.4 0.6 0.8 11
1.5
2
2.5
3
3.5
4
p0
J(p 0),
nor
mal
ized
(a)
r=2r=3
2 2.2 2.4 2.6 2.8 30
0.05
0.1
0.15
0.2
0.25
r
optim
al p
0
(b)
Figure 5.10 Optimal level probability. (a) J(p0) versus p0; (b) optimal p0 versus r.
A conventional choice in practice is p0 = 0.1. It is optimal when r = 2.55 and it appears to
follow the middle way. Using this value, the increase in c.o.v. compared to the optimal choice
is no more than 5% (occurring when r = 2). This choice is seen to strike a balance between
efficiency and convenience in implementation. It is conceptually convenient, that is, one order
of magnitude decrease in probability per simulation level.
Regardless of the mathematical details, the above analysis is never complete because it
assumes that the correlation factor 𝛾 in Eq. (5.33) is fixed. In reality, it depends on p0; it is
related to r and it can depend on m. The analysis here only serves to provide a guideline and
it should be complemented with simulation experience with the problem at hand.
5.4.4.1 Remark
For instructional purposes, we perform a similar analysis of the optimal choice of p0 when the
seeds from the last level are used as the conditional samples for the current level instead being
discarded, as discussed at the beginning of Section 5.4.3. The result illustrates the importance
of the correlation between the samples at different levels.
When the seeds are kept as the samples for the current level, it is only required to generate
additional N − Nc = (1 − p0)N samples at each level. The total number of samples is given by
Eq. (5.35) (recalled here):
NT = N + N(1 − p0)(m − 1) = N[1 + (1 − p0)(m − 1)] (5.40)
instead of mN. An analogous formula for the squared c.o.v. in Eq. (5.33) at the target probability
pF = pm0
is then given by
𝛿2 =1 − p0
p0NT(1 + 𝛾)mr[1 + (1 − p0)(m − 1)]
=1 − p0
p0NT(1 + 𝛾)
(ln p−1
F
ln p−10
)r [1 + (1 − p0)
(ln p−1
F
ln p−10
− 1
)] 1 ≤ r ≤ 2 (5.41)
where 𝛾 is a correlation factor defined as before.

178 Engineering Risk Assessment with Subset Simulation
0 0.2 0.4 0.6 0.8 110
1
102
103
104
pF
=10-1
pF
=10-6
Uncorrelated levels
Δ2
p0
0 0.2 0.4 0.6 0.8 110
0
101
102
103
104
105
106
pF
=10-1
pF
=10-6
Fully correlated levels
Δ2
p0
(a) (b)
Figure 5.11 Squared unit c.o.v. versus level probability according to Eq. (5.42). (a) Uncorrelated levels;
(b) fully correlated levels.
In the current case, the value of p0 that minimizes 𝛿2 for given NT depends on pF . Figure
5.11 shows the variation of the squared unit c.o.v.
Δ2 = 𝛿2NT =1 − p0
p0
(1 + 𝛾)
(ln p−1
F
ln p−10
)r [1 + (1 − p0)
(ln p−1
F
ln p−10
− 1
)]1 ≤ r ≤ 2
(5.42)
The correlation factor has been taken to be 𝛾 = 3. As far as Eq. (5.42) is concerned, this
value is immaterial because it does not affect the optimal value of p0. Figures 5.11a and 5.11b
correspond to the case when the samples among different levels are uncorrelated and fully
correlated, that is, r =1, 2 in Eq. (5.42). In each plot the curves from bottom to top correspond
to the target probabilities pF = 10−1, 10−2,… , 10−6. Figure 5.11a suggests that when the
levels are uncorrelated, the optimal value of p0 increases steadily with diminishing pF from
about 0.5 towards 1. This is very different from the case when the seeds are discarded, where
the optimal value is about 0.2 (see Figure 5.10). On the other hand, Figure 5.11b shows that
when the levels are fully correlated, the optimal value is about 0.05 regardless of pF , which is
similar to the case when the seeds are discarded.
Simulation experiments indicate that the optimal value suggested by Figure 5.11a is far from
reality. The unit c.o.v. often increases significantly for moderate values of p0. Essentially, Eq.
(5.42) fails to reflect the effect of p0 when the seeds are not discarded. This can be explained
as follows. When the seeds are kept, the number of samples generated at each level is only
(1 − p0)N and so it diminishes as p0 increases. According to Eq. (5.42), this allows a larger value
of p0 to be optimal because it reduces the term (1 − p0)(m − 1) = (1 − p0)(ln p−1F ∕ ln p−1
0− 1).
This effect is more pronounced for smaller pF because the number of levels m increases.
Minimizing Eq. (5.42) with r = 1 implicitly assumes that r does not depend on p0. In reality,
as p0 increases, successive simulation levels have a larger number of samples in common
because the seeds collected from the last level are used as the samples for the current level.

Subset Simulation 179
This means that when the seeds are kept, r increases significantly with p0, which increases
the estimation variance. As a result, the actual optimal value of p0 is significantly smaller
than that predicted by Eq. (5.42) with r = 1, that is, Figure 5.11a. The values suggested by
Figure 5.11a will be optimal only when the samples at different levels are uncorrelated, which
is not realistic. Figure 5.11b still gives the right picture because it assumes the conservative
upper-bound value r = 2.
In short, Eq. (5.33) can give a reasonable optimal value of p0 because assuming a constant
r does not deviate significantly from reality when the seeds are not kept. In contrast, Eq.
(5.42) fails to do so because when the seeds are kept r increases significantly for large p0.
The findings here indicate that the correlation between levels is important, although it can be
difficult to address in theoretical analysis. Regardless of whether it is reflected in the analysis,
its effect should be borne in mind when interpreting the derived results.
5.5 Analysis of Statistical Properties
In this section we analyze the statistical properties of the CCDF estimate in Subset Simulation,
namely, its mean and variance. This provides a theoretical justification for the error assess-
ment procedure in Section 5.3. The materials in this subsection are rather technical. Readers
interested in applications may skip this section on first reading.
Recall from the algorithm (Section 5.1) that the CCDF estimate of Subset Simulation
consists of the fixed probability levels {p(i)k } and the random threshold levels {b(i)
k }. The latter
varies from one simulation run to another. Strictly speaking, the statistical properties of {b(i)k }
should be assessed. However, these have not been developed yet, possibly because they are
difficult to derive and the results will likely be related to the PDF of Y , which is unknown
in the first place. Here, the statistical properties of the estimate for P(Y > b) for fixed b are
discussed instead.
For a given b, let Pb denote the estimate for P(Y > b) in Subset Simulation. Recall the
intermediate threshold levels {bi} in Eqs. (5.7) and (5.9). According to the algorithm, Pbdepends on the interval that b lies in among {bi}:
Pb =
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
1
N
N∑k=1
I(
Y (0)
k > b)
b < b1
pi−10
1
N
Nc∑j=1
Ns∑k=1
I(
Y (i−1)
jk > b)
bi−1 < b < bi i = 2,… , m − 1
pm−10
1
N
Nc∑j=1
Ns∑k=1
I(
Y (i−1)
jk > b)
b > bm−1
(5.43)
Here, Y (0)
k = h(X(0)
k ) and {X(0)
k : k = 1,… , N} are the samples at Level 0 (Direct Monte
Carlo). For i = 2,… , m, Y (i−1)
jk = h(X(i−1)
jk ) and X(i−1)
jk (j = 1,… , Nc; k = 1,… , Ns) is the kth
MCMC sample of the jth chain at Level (i − 1), that is, conditional on {Y > bi−1}.

180 Engineering Risk Assessment with Subset Simulation
The random nature of {bi} causes some complications in the derivation of the statistical
properties of Pb. For clarification, the context and assumptions of the derivation are described
first, followed by an analysis of the mean and variance.
5.5.1 Random Intervals
According to Eq. (5.43), the formula for Pb depends on the interval that b belongs to, but the
interval is random because it depends on {bi}. This means that for a given b, which interval it
belongs to is itself a random event. In principle, the mean and variance of Pb can be obtained
using the theorem of total probability accounting for all possible intervals that b may lie in.
Specifically, let the intervals be denoted by {Bi : i = 0,… , m − 1} where
B0 = {b ≤ b1}
Bi = {bi < b ≤ bi+1}
Bm−1 = {b > bm−1}
i = 1,… , m − 2 (5.44)
For a given b, let Ib denote the index of the interval that b lies in. For example, if b2 < b ≤ b3
then Ib = 2. Clearly Ib is a random variable that depends on {bi}.
To investigate the bias of Pb, its expectation can be expressed using the theorem of total
probability as
E[Pb] =m−1∑j=0
E[Pb|Ib = j]P(Ib = j) (5.45)
Evaluating E[Pb] requires the knowledge of the conditional expectation E[Pb|Ib = j] and
the probability P(Ib = j) for j = 0,… , m − 1. To simplify analysis we consider those b’s such
that it can be considered practically as lying in a particular interval, in the sense that
P(Ib = i) ∼ 1 for some i and P(Ib = j) ∼ 0 for j ≠ i (5.46)
In this case
E[Pb] ∼ E[Pb|Ib = i] (5.47)
and so it is sufficient to consider the conditional expectations individually for different intervals
without knowing the probabilities {P(Ib = j) : j = 0,… , m − 1}. In evaluating the conditional
expectations, the distribution of the generated samples is assumed to be unaffected by the
conditioning because the probability is close to 1. In this context we can show that,
E[Pb|Ib = i] → P(Y > b) N → ∞ (5.48)
and so Pb is asymptotically unbiased.

Subset Simulation 181
The variance of Pb can be assessed using the conditional variance formula,
var[Pb] = E{var[Pb|Ib]} + var{E[Pb|Ib]} (5.49)
In the context of Eq. (5.46), var{E[Pb|Ib]} may be neglected compared to E{var[Pb|Ib]}
and so
var[Pb] ∼ E{var[Pb|Ib]} =m−1∑j=0
var[Pb|Ib = j]P(Ib = j) ∼ var[Pb|Ib = i] (5.50)
This again justifies analyzing var[Pb|Ib = i] for i = 0,… , m − 1 as a proxy for var[Pb].
Theoretically, the result obtained in the context here is applicable for those b’s away from
{bi}, say by a few standard deviations which are O(N−1∕2). For those near the {bi}, the result
will generally be a weighted sum of those from the two neighboring intervals.
5.5.2 Random CCDF Values
The variability of the CCDF estimate is closely related to the variability of the CCDF values
{FY (bi)}, where FY is the (unknown) CCDF of Y in Eq. (5.1). They are random because {bi}
are. Recall that b1 is the N(1 − p0)th smallest value of {Y (0)
k : k = 1,… , N} and so it depends
on the samples {X(0)
k : k = 1,… , N} at Level 0. For higher levels, bi (i ≥ 2) depends on the
samples {X(i−1)
jk : j = 1,… , Nc; k = 1,… , Ns} at Level (i − 1). Since {X(i−1)
jk } are generated
from seeds taken from the last level, they depend on the samples at all lower levels. Generally
{bi} are dependent.
For analysis purpose we characterize the randomness of the CCDF values {FY (bi)} as
FY (b1) = p0(1 + 𝜀1) (5.51)
FY (bi) = FY (bi−1)p0(1 + 𝜀i) i = 2,… , m − 1 (5.52)
where 𝜀i (i = 1,… , m − 1) is a random variable that reflects the statistical variability of bi as
an order statistic of the values of Y at Level (i − 1) for given bi−1. Due to the use of seeds for
starting Markov chains in Subset Simulation, {𝜀i} are generally dependent.
Equations (5.51) and (5.52) imply that
FY (bi) = pi0
i∏j=1
(1 + 𝜀j) i = 1,… , m − 1 (5.53)
When the variability of {𝜀i} vanishes as N → ∞, the expectation of the product term in Eq.
(5.53) is asymptotically equal to 1:
E[FY (bi)] ∼ pi0
(5.54)
The standard deviation of the product term can then be viewed as the c.o.v. of FY (bi).

182 Engineering Risk Assessment with Subset Simulation
5.5.3 Summary of Results
In the context considered so far, the derivation is based on the following assumptions:
1. For i = 1,… , m − 1, as N → ∞,
E[𝜀i] = O(N−1) (5.55)
var[𝜀i] = O(N−1) (5.56)
These usually hold when the algorithm is implemented properly.
2. At the ith simulation level (i = 1,… , m − 1), the MCMC samples along different chains
are uncorrelated through the indicator function, that is, I(Y (i)j1k1
> b) and I(Y (i)j2k2
> b) are
uncorrelated for all k1, k2 whenever j1 ≠ j2. In reality this assumption does not hold strictly,
because at a given simulation level two Markov chains are generally correlated. This is
because their seeding samples may be identical, due to repeated samples in MCMC. Even
if the seeding samples are distinct, they can still be correlated because they may belong to
the same chain in some lower simulation levels.
Based on the above assumptions, the main theoretical results are outlined as follows. It can
be shown that Pb is asymptotically unbiased as N → ∞. The c.o.v. of Pb depends on which
interval b belongs to. Let 𝛿b be the c.o.v. of Pb. Then
𝛿2b =
var[Pb]
P(Y > b)2∼
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
1 − p(1)
b
p(1)
b Nb < b1
𝛼2i−1
+1 + 𝛾
(i)b
N
(1 − p(i)
b
p(i)b
)bi−1 < b < bi i = 2,… , m − 1
𝛼2m−1
+1 + 𝛾
(m)
b
N
(1 − p(m)
b
p(m)
b
)b > bm−1
(5.57)
Here, 𝛼i−1 is the c.o.v. of FY (bi−1)−1 where FY is the (unknown) CCDF of Y;
p(i)b = E[P(Y > b|Y > bi−1)] = FY (b)E
[FY (bi−1)−1
](5.58)
and
𝛾(i)b = 2
Ns−1∑k=1
(1 − k
Ns
)𝜌
(i)b (k) (5.59)

Subset Simulation 183
is a factor that accounts for the correlation among the MCMC samples at Level (i − 1); 𝜌(i)b (k)
is the correlation coefficient of the indicator function values {I(Y (i−1)
jk > b) : k = 1,… , Ns} at
k steps apart.
Some comments regarding Eq. (5.57) are in order. The c.o.v. depends on which interval
b lies in because the expression for Pb in Eq. (5.43) does. In the first interval {b < b1} it is
simply the c.o.v. of a Direct Monte Carlo estimator. For subsequent intervals {bi−1 < b < bi}
it consists of the variability of FY (bi−1)−1 due to the variability of the conditional threshold
bi−1 and the variability of the conditional probability estimate (i.e., the average of indicator
function values). The latter variability has the same form as the c.o.v. of a Direct Monte Carlo
estimator, except for the term (1 + 𝛾(i)b ) which accounts for the correlation among the MCMC
samples. As the simulation level ascends, the c.o.v. accumulates through 𝛼i.
5.5.3.1 Approximations
It is not easy to determine 𝛼i−1 because neither the CCDF FY nor the c.o.v. of bi−1 is known.
For error assessment purposes, the following series of approximations that can be reasoned
from Eq. (5.53) may be used:
𝛼i−1 = c.o.v. of FY (bi−1)−1 ≈ c.o.v. of FY (bi−1) ≈ var[∑i−1
j=1𝜀j
]1∕2
(5.60)
The variance on the rightmost depends on the correlation among {𝜀j}. It is generally
bounded between two extremes, when the {𝜀j} are uncorrelated and when they are perfectly
correlated: ∑i−1
j=1var[𝜀j] < var
[∑i−1
j=1𝜀j
]<
∑i−1
j=1
∑i−1
k=1var[𝜀j]
1∕2var[𝜀k]1∕2 (5.61)
Again, var[𝜀j] is not known but it can be approximated by the squared c.o.v. of a (conditional)
probability estimator with a target probability of p0 at Level (j − 1), that is,
var[𝜀j] ≈(1 + 𝛾j)
N
(1 − p0
p0
)(5.62)
where 𝛾1 = 0 and 𝛾j (j = 2,… , m − 1) is given by Eq. (5.21). This is consistent with the
relationship between the c.o.v. of the sample quantile and the probability estimate discussed
in Section 2.5.6. The above approximations justify the c.o.v. bounds in Eq. (5.17).
5.5.4 Expectation
Here, we show that Pb is asymptotically unbiased by analyzing its expectation conditional on
different intervals. For simplicity in notation we omit the conditioning on the interval in the
derivation, for example, abbreviating E[Pb|Ib = i] to E[Pb].

184 Engineering Risk Assessment with Subset Simulation
First, consider the case when b < b1. Then Pb is given by the top expression in Eq. (5.43).
Recall that Y (0)
k = h(X(0)
k ) where the samples {X(0)
k : k = 1,… , N} are i.i.d. drawn from their
parameter PDF q. Taking expectation on Pb gives
E[Pb] = 1
N
N∑k=1
E[I(
Y (0)
k > b)]
= 1
N× N × E
[I(
Y (0)
1> b
)]= P(Y > b) (5.63)
since {I(Y (0)
k > b) : k = 1,… , N} are i.i.d. with E[I(Y (0)
k > b)] = P(Y > b).
Next, consider the general case when bi−1 < b < bi (i = 2,… , m − 1). Then Pb is given by
the middle expression in Eq. (5.43) where Y (i−1)
jk = h(X(i−1)
jk ). For a given chain j, {X(i−1)
jk : k =1,… , N} are Markov chain samples started from the seed X(i−1)
j0 obtained from Level (i − 2).
For a given bi−1, the Markov chain samples are distributed as q(⋅|Y > bi−1). This implies
E[I(
Y (i−1)
jk > b) |bi−1
]= P(Y > b|Y > bi−1) (5.64)
Taking conditional expectation E[⋅|bi−1] on the middle expression in Eq. (5.43) gives
E[Pb|bi−1] = pi−10
1
N
Nc∑j=1
Ns∑k=1
E[I(
Y (i−1)
jk > b) |bi−1
]= pi−1
0
1
NNcNsP(Y > b|Y > bi−1)
= pi−10
P(Y > b|Y > bi−1)
(5.65)
since NcNs = N. To proceed, note that
P(Y > b|Y > bi−1) =FY (b)
FY (bi−1)= FY (b)p−(i−1)
0
i−1∏j=1
(1 + 𝜀j)−1 (5.66)
after using Eq. (5.53). Substituting Eq. (5.66) into Eq. (5.65),
E[Pb|bi−1] = FY (b)
i−1∏j=1
(1 + 𝜀j)−1 (5.67)
Taking expectation gives
E[Pb] = E{E[Pb|bi−1]} = FY (b)E
[i−1∏j=1
(1 + 𝜀j)−1
](5.68)

Subset Simulation 185
To evaluate the expectation, note that for small {𝜀j},
i−1∏j=1
(1 + 𝜀j)−1 ∼
i−1∏j=1
(1 − 𝜀j) ∼ 1 −i−1∑j=1
𝜀j +∑j>k
𝜀j𝜀k (5.69)
Taking expectation and using E[𝜀j] = O(N−1) from Eq. (5.55) gives
E[∏i−1
j=1(1 + 𝜀j)
−1]= 1 + O(N−1) (5.70)
and so Pb is asymptotically unbiased.
The proof for the case of b > bm−1 is similar to that for the general case with i = m − 1
because they share the same expression of Pb.
5.5.5 Variance
First consider b < b1. In this case Pb is just the Direct Monte Carlo estimate with i.i.d. samples,
and so its variance is given by
var[Pb] = 1
NFY (b)[1 − FY (b)] b < b1 (5.71)
The squared c.o.v. of Pb is given by
𝛿2b =
var[Pb]
P(Y > b)2= 1
N
[1 − FY (b)
FY (b)
]b < b1 (5.72)
Next, consider the general case bi−1 < b < bi, i = 2,… , m − 1. To simplify notations, let
I(i)jk = I
(Y (i−1)
jk > b)
(5.73)
p(i)b = 1
N
Nc∑j=1
Ns∑k=1
I(i)jk (5.74)
so that
Pb = pi−10
p(i)b (5.75)
and
var[Pb] = p2(i−1)
0var
[p(i)
b
](5.76)

186 Engineering Risk Assessment with Subset Simulation
5.5.5.1 Variance of p(i)b
Using the conditional variance formula,
var[p(i)
b
]= var
{E[p(i)
b |bi−1
]}+ E
{var
[p(i)
b |bi−1
]}(5.77)
For the first term in Eq. (5.77), note that the distribution of {I(i)jk } depends on bi−1. From
Eq. (5.64),
E[I(i)jk |bi−1
]= pb(bi−1) (5.78)
where
pb(bi−1) = P(Y > b|Y > bi−1) =FY (b)
FY (bi−1)(5.79)
is defined to facilitate analysis. The conditional expectation of p(i)b is then given by
E[p(i)
b |bi−1
]= 1
NNcNsE
[I(i)jk |bi−1
]= pb(bi−1) (5.80)
Taking variance gives
var{
E[p(i)
b |bi−1
]}= var[pb(bi−1)] (5.81)
The variance of pb(bi−1) shall be investigated later.
For the second term in Eq. (5.77), note that for a given bi−1, p(i)b is an estimator based on
Nc Markov chains which are assumed to be uncorrelated through the indicator function. The
conditional variance var[p(i)b |bi−1] can then be derived using a similar technique to that in
Section 4.4.1. It is shown at the end of this subsection that the final expression after taking
expectation is given by
E{
var[p(i)
b |bi−1
]}= 1
N
{p(i)
b
[1 − p(i)
b
] (1 + 𝛾
(i)b
)− var[pb(bi−1)]
}(5.82)
where
p(i)b = E[pb(bi−1)] = E[P(Y > b|Y > bi−1)] (5.83)
𝛾(i)b = 2
Ns−1∑k=1
(1 − k
Ns
)𝜌
(i)b (k) (5.84)

Subset Simulation 187
is a correlation factor that accounts for the correlation between the Markov chain samples at
Level (i − 1);
𝜌(i)b (k) =
R(i)b (k)
p(i)b
[1 − p(i)
b
] k = 1,… , Ns − 1 (5.85)
is the correlation coefficient at lag k; and
R(i)b (k) = cov
[I(i)11
, I(i)1,1+k
](5.86)
is the covariance at lag k.
Substituting Eqs. (5.81) and (5.82) into Eq. (5.77) and rearranging gives
var[p(i)
b
]=
(1 − 1
N
)var[pb(bi−1)] + 1
Np(i)
b
[1 − p(i)
b
] (1 + 𝛾
(i)b
)(5.87)
and so, using Eq. (5.76),
var[Pb] = p2(i−1)
0
(1 − 1
N
)var[pb(bi−1)] +
p2(i−1)
0
Np(i)
b
[1 − p(i)
b
] (1 + 𝛾
(i)b
)(5.88)
Note that the variance of pb(bi−1) is given by, after substituting Eq. (5.53) into Eq. (5.79) and
taking variance,
var[pb(bi−1)] = FY (b)2p−2(i−1)
0var
[i−1∏j=1
(1 + 𝜀j)−1
](5.89)
Substituting Eq. (5.89) into Eq. (5.88) and dividing by P(Y > b)2, the c.o.v. 𝛿b of Pb is
asymptotically given by
𝛿2b =
var[Pb]
P(Y > b)2∼ var
[i−1∏j=1
(1 + 𝜀j)−1
]+ 1
N
(1 − p(i)
b
p(i)b
)(1 + 𝛾
(i)b
)bi−1 < b < bi
(5.90)
where we have used 1 − 1∕N ∼ 1 and
P(Y > b) ∼ E[Pb] = pi−10
E[p(i)
b
]= pi−1
0p(i)
b (5.91)
Let 𝛼i−1 be the c.o.v. of FY (bi−1)−1. From Eq. (5.53), FY (bi−1)−1 ∼ pi−10
and so
𝛼2i−1
∼ var
[i−1∏j=1
(1 + 𝜀j)−1
](5.92)

188 Engineering Risk Assessment with Subset Simulation
Eq. (5.90) can then be written as
𝛿2b ∼ 𝛼2
i−1+ 1
N
(1 − p(i)
b
p(i)b
)(1 + 𝛾
(i)b
)bi−1 < b < bi (5.93)
which gives the middle expression in Eq. (5.57). The case for b > bm−1 is a special case of
this result when i = m.
5.5.5.2 Expression for E{var[p(i)b|bi−1]}
Here we derive the expression for E{var[p(i)b |bi−1]} in Eq. (5.82), where p(i)
b is given by Eq.
(5.74) and bi−1 < b < bi.
At Level (i − 1) the MCMC chains are assumed to be uncorrelated through the indicator
function. This means that the inner sums {∑Ns
k=1I(i)jk : j = 1,… , Nc} in Eq. (5.74) are uncorre-
lated and identically distributed. Then
var[p(i)
b |bi−1
]= var
[1
N
Nc∑j=1
( Ns∑k=1
I(i)jk
)|bi−1
]=
Nc
N2var
[ Ns∑k=1
I(i)1k |bi−1
](5.94)
The technique used for evaluating the variance in Eq. (5.94) is similar to that in Section
4.4.1. First express it as a sum of variance and covariance:
var
[ Ns∑k=1
I(i)1k |bi−1
]=
Ns∑k=1
var[I(i)1k |bi−1
]+
Ns∑k1≠k2
cov[I(i)1k1
, I(i)1k2
|bi−1
](5.95)
Note that
var[I(i)1k |bi−1
]= pb(bi−1) − pb(bi−1)2 (5.96)
where pb(bi−1) = E[p(i)b |bi−1] as in Eq. (5.80). The first sum in Eq. (5.95) then becomes
Ns∑k=1
var[I(i)1k |bi−1
]= Ns
[pb(bi−1) − pb(bi−1)2
](5.97)
To evaluate the second sum in Eq. (5.95), we make use of the symmetry of covariance and the
fact that the Markov chain is stationary:
cov[I(i)1k1
, I(i)1k2
|bi−1
]= cov
[I(i)1k2
, I(i)1k1
|bi−1
](5.98)

Subset Simulation 189
This implies that the covariance depends only on |k1 − k2|, that is,
cov[I(i)1k1
, I(i)1k2
|bi−1
]= cov
[I(i)11
, I(i)1,1+|k1−k2||bi−1
](5.99)
The second sum in Eq. (5.95) can then be re-structured according to the lag k = |k1 − k2|that goes from 1 to Ns − 1. For |k1 − k2| = 1, there are 2(Ns − 1) identical terms equal
to cov[I(i)11
, I(i)12|bi−1], corresponding to (k1, k2) = (1,2), (2,1), (2,3), (3,2), . . . , (Ns − 1, Ns),
(Ns, Ns − 1). Similarly, for |k1 − k2| = 2, there are 2(Ns − 2) identical terms equal to
cov[I(i)11
, I(i)13|bi−1]. In general, for |k1 − k2| = k (k = 1,… , Ns − 1) there are 2(Ns − k) iden-
tical terms of cov[I(i)11
, I(i)1,1+k|bi−1]. Consequently,
Ns∑k1≠k2
cov[I(i)1k1
, I(i)1k2
|bi−1
]=
Ns−1∑k=1
2(Ns − k)cov[I(i)11
, I(i)1,1+k|bi−1
](5.100)
Substituting Eq. (5.97) and Eq. (5.100) into Eq. (5.95),
var
[ Ns∑k=1
I(i)1k |bi−1
]= Ns
[pb(bi−1) − pb(bi−1)2
]+ 2
Ns−1∑k=1
(Ns − k)cov[I(i)11
, I(i)1,1+k|bi−1
](5.101)
Substituting into Eq. (5.94) and simplifying gives
var[p(i)
b |bi−1
]= 1
N
[pb(bi−1) − pb(bi−1)2
]+ 2
N
Ns−1∑k=1
(1 − k
Ns
)cov
[I(i)11
, I(i)1,1+k|bi−1
](5.102)
Taking expectation,
E{
var[p(i)
b |bi−1
]}= 1
N
{E[pb(bi−1)] − E
[pb(bi−1)2
]}+ 2
N
Ns−1∑k=1
(1 − k
Ns
)cov
[I(i)11
, I(i)1,1+k
](5.103)
The above can be written in a more compact form as follows. First note that
E[pb(bi−1)2
]= E[pb(bi−1)]2 + var[pb(bi−1)] (5.104)
On the other hand, let
R(i)b (k) = cov
[I(i)11
, I(i)1,1+k
](5.105)

190 Engineering Risk Assessment with Subset Simulation
be the covariance at lag k as in Eq. (5.86) and
𝜌(i)b (k) =
R(i)b (k)
p(i)b
[1 − p(i)
b
] k = 1,… , Ns − 1 (5.106)
be the correlation coefficient at lag k as in Eq. (5.85); and
p(i)b = E[pb(bi−1)] = E[P(Y > b|Y > bi−1)] (5.107)
as in Eq. (5.83).
Substituting Eqs. (5.104)–(5.106) into Eq. (5.103) and rearranging gives Eq. (5.82):
E{
var[p(i)
b |bi−1
]}= 1
Np(i)
b
[1 − p(i)
b
] (1 + 𝛾
(i)b
)− 1
Nvar[pb(bi−1)] (5.108)
where
𝛾(i)b = 2
Ns−1∑k=1
(1 − k
Ns
)𝜌
(i)b (k) (5.109)
as in Eq. (5.84).
5.6 Auxiliary Response
In addition to the target response, the samples generated during Subset Simulation can also
provide information for estimating the CCDF of other response quantities. This will be benefi-
cial if those quantities have already been computed in the determination of the target response,
or their evaluation does not require significant additional computational effort. Let V = g(X)
be a scalar response quantity that depends on the set of random variables X. Suppose a Subset
Simulation run is performed for the target response Y = h(X). It produces samples {X(i)k }
and response values {Y (i)k } for estimating the CCDF of Y . If the sample values of V are also
calculated, the CCDF of V can also be estimated. Since the MCMC samples are driven by
the exceedance of Y and the quantity V is just computed along the way, we call Y a “driving
response” and V an “auxiliary response.”
Recall the intermediate threshold levels {bi : i = 1,… , m − 1} generated in Subset Simu-
lation corresponding to CCDF values {pi0
: i = 1,… , m − 1}. Define a sequence of events or
“bins” associated with Y:
B0 = {Y ≤ b1}
Bi = {bi < Y ≤ bi+1}, i = 1,… , m − 2
Bm−1 = {Y > bm−1}
(5.110)

Subset Simulation 191
It is clear that {Bi : i = 0,… , m − 1} are mutually exclusive and collectively exhaustive events,
and therefore they form a partition of the sample space. It follows from the theorem of total
probability that
P(V > v) =m−1∑i=0
P(V > v|Bi)P(Bi) (5.111)
This equation says that the probability information about V can be obtained based on the
information about Y . Note that the bins {Bi} are random because they depend on {bi}. The
bin probabilities may be approximated by
P(B0) ≈ P0 = 1 − p0
P(Bi) ≈ Pi = pi0− pi+1
0, i = 1,… , m − 2
P(Bm−1) ≈ Pm−1 = pm−10
(5.112)
It can be easily checked that∑m−1
i=0 Pi = 1.
The conditional probability P(V > v|Bi) can be estimated using the samples in the bin Bi.
Let Mi denote the number of samples in Bi:
Mi = (1 − p0)N, i = 0,… , m − 2
Mm−1 = N(5.113)
For a given i, let {Xik : k = 1,… , Mi} denote the samples of X conditional on Bi. Note that
Xik ≠ X(i)k because Bi ≠ Fi. The conditional probability P(V > v|Bi) can be estimated as
P(V > v|Bi) ≈ Qi =1
Mi
Mi∑k=1
I(Vik > v) (5.114)
where Vik = g(Xik) is the sample value of V . Substituting Eqs. (5.112) and (5.114) into Eq.
(5.111), P(V > v) can be estimated by
P(V > v) ≈ Pv =m−1∑i=0
QiPi (5.115)
Plotting (v, Pv) for different values of v gives the CCDF estimate of V .
Example 5.6 Illustration of auxiliary responseAs an illustration, Figure 5.12 shows a plot of the samples of V versus Y . Here, N = 10,
p0 = 0.2, and m = 4 are used in Subset Simulation for Y . This gives
P0 = (1 − p0) = 0.8, P1 = p0(1 − p0) = 0.16, P2 = p20(1 − p0) = 0.032, P3 = p3
0= 0.008

192 Engineering Risk Assessment with Subset Simulation
Y
1b 2b 3b0B ]( ]( ](
1B2B 3B
V
v
Figure 5.12 Illustration of auxiliary response CCDF calculation.
Check that P0 + P1 + P2 + P3 = 1. On the other hand,
M0 = M1 = M2 = (1 − p0)N = 8
M3 = N = 10
That is, B0, B1, B2 each contain 8 samples and B3 contains 10 samples.
If we count the number of samples in each bin whose V exceeds the threshold level v in
Figure 5.12, there is only one sample in B0, no sample in B1, 4 samples in B2, and 5 samples
in B3. Thus,
Q0 = 1∕8, Q1 = 0∕8, Q2 = 4∕8, Q3 = 5∕10
Using Eq. (5.115),
Pv =m−1∑i=0
QiPi =(
1
8
)(0.8) +
(0
8
)(0.16) +
(4
8
)(0.032) +
(5
10
)(0.008) = 0.12
5.6.1 Statistical Properties
Assuming that the Subset Simulation procedure for Y is asymptotically unbiased and conver-
gent, it can be shown that the estimator Pv in Eq. (5.115) is asymptotically unbiased. The proof
can be found at the end of this subsection.
The estimation error of Pv depends on the relationship between Y and V . It can be verified
that if V ≡ Y , then Pv is identical to the estimate for Y in Subset Simulation and so they have the

Subset Simulation 193
same estimation error. At the other extreme, if V is independent of Y , then the estimation error
of Pv is always worse than a Direct Monte Carlo estimator. In this case there is no incentive
for estimating the CCDF of V via Subset Simulation driven by Y . To see this, suppose Vis independent of Y and consider the case where in Eqs. (5.114) and (5.115) the indicator
functions {I(Vik > v) : i = 0,… , m − 1; k = 1,… , Mi} are all i.i.d. with mean P(V > v) and
variance P(V > v)[1 − P(V > v)]. This is the best possible situation because in reality the
samples are correlated, which will increase the variance of the estimator. Define Pik = Pi∕Miso that
∑i,k Pik = 1; in the double sum i goes from 0 to (m − 1) and k from 1 to Mi. We can
then write Pv =∑
i,k I(Vik > v)Pik, that is, a weighted sum of i.i.d. indicator function values.
Taking variance gives
var[Pv] =∑i,k
var[I(Vik > v)]P2ik = P(V > v)[1 − P(V > v)]
∑i,k
P2ik (5.116)
The double sum can be expressed as∑i,k
P2ik =
∑i,k
(Pik − P)2 + P2M (5.117)
where M =∑m−1
i=0 Mi is the total number of samples (i.e., function evaluations) of V and
P =∑
i,k Pik∕M is the average of Pik. Since∑
i,k Pik = 1, we have P = 1∕M and so
∑i,k
P2ik =
∑i,k
(Pik −
1
M
)2
+ 1
M≥ 1
M(5.118)
Substituting into Eq. (5.116), we conclude
var[Pv] ≥ 1
MP(V > v)[1 − P(V > v)] (5.119)
where the equality holds if and only if Pik = 1∕M for all i, k. The RHS is the variance of Direct
Monte Carlo estimator with M i.i.d. samples of V . This means that Pv is inferior to Direct
Monte Carlo estimator if V is independent of Y . This results from the non-uniform weights
assigned to the i.i.d. samples.
In the general case, a direct formula for the variance of Pv has not been developed for
assessing the estimation error using information in a single simulation run. It can be expected
that the higher the correlation between V and Y the smaller the estimation variance will be. It
is also inversely proportional to the sample size, which will be discounted by the correlation
among the MCMC samples.
Proof of asymtotic unbiasednessTo show that Pv is asymptotically unbiased, note that the bins {Bi} are random and so P(Bi)
is a random quantity. Let
P(Bi) = Pi + Zi (5.120)

194 Engineering Risk Assessment with Subset Simulation
where Pi is given by Eq. (5.112) and Zi is a random quantity with E[Zi] → 0 and var[Zi] → 0
as N → ∞. Note that Zi is determined by Bi. Substituting Eq. (5.120) into Eq. (5.115) and
taking expectation,
E[Pv] =m−1∑i=0
E[QiP(Bi)] −m−1∑i=0
E[QiZi] (5.121)
To evaluate the first sum, note that
E[QiP(Bi)] = E{E[QiP(Bi)|Bi]} = E{E[Qi|Bi]P(Bi)} = E[P(V > v|Bi)P(Bi)] (5.122)
since
E[Qi|Bi] =1
Mi
Mi∑k=1
E[I(Vik > v)|Bi] =1
Mi
Mi∑k=1
P(Vik > v|Bi) = P(V > v|Bi) (5.123)
Thus,
m−1∑i=0
E[QiP(Bi)] =m−1∑i=0
E[P(V > v|Bi)P(Bi)] = E
[m−1∑i=0
P(V > v|Bi)P(Bi)
]= P(V > v)
(5.124)
It remains to show that the second sum in Eq. (5.121) tends to zero as N → ∞. This can be
done by conditioning on Bi and then using Cauchy–Schwartz inequality:
E[QiZi]
= E{E[QiZi|Bi]}
= E{E[Qi|Bi]Zi}
= E[P(V > v|Bi)Zi]
≤ E[P(V > v|Bi)
2]1∕2
E[Z2
i
]1∕2→ 0
(5.125)
since E[P(V > v|Bi)2] ≤ 1 and E[Z2
i ] = var[Zi] + E[Zi]2 → 0.
5.6.2 Design of Driving Response
Suppose one performs a Subset Simulation run using the driving response Y . Using a single
simulation run, it is also desired to estimate the CCDF of a number of auxiliary responses,
say, {Vi : i = 1,… , nv}. Clearly, the relationship between Y and {Vi} affects the information
that can be extracted from the generated samples for estimating their CCDFs. The design
of the driving response therefore depends on how much information the user would like to
know about one auxiliary response compared to another. This “information,” however, is

Subset Simulation 195
difficult to quantify, at least not in a way that can be easily implemented. The problem is also
complicated by several issues. The auxiliary responses can have different scaling (units). They
can vary with different sensitivities over different scales ofX. Even if this information has been
quantified, one should also decide on the relative amount of information desired to be extracted
for different auxiliary responses. When this is not available as close-form expressions, some
simulation runs may need to be performed in order to tune the driving response. In short,
formally designing the driving response is not a trivial task, but a proper choice suffices to
give satisfactory results. See Hsu and Ching (2010) for some discussion on the design of the
driving response.
One simple form of the driving response can be constructed as follows. It intends to provide
similar information for different auxiliary responses. In order to avoid scaling problems, the
driving response can be constructed as a function of non-dimensional parameters formed by
the auxiliary responses:
Y =nv∑
i=1
ai
(Vi − vi
si
)(5.126)
where {vi} and {si} are respectively the mean and standard deviation of Vi calculated from
the samples of Vi at simulation Level 0 (Direct Monte Carlo). The non-dimensional quantity
(Vi − vi)∕si roughly ensures that Y is sensitive to Vi over its probable range of values. The
coefficients {ai} are also dimensionless. Their choice depends on the user’s emphasis on the
different variables.
5.7 Black Swan Events
Subset Simulation is based on generating samples that gradually populate towards the failure
region and yield information for estimating failure probabilities. The samples are generated
adaptively, in that the distribution of samples at higher simulation levels depends on the
samples at lower levels. This mechanism is based on the premise that the samples for frequent
events can be later developed into samples for rare events. We refer here those rare events (at
higher levels) of significant probability content but unlikely to be developed from the frequent
events (at lower levels) as “black swan events.” This is an approximate concept relative to
the configuration of a single simulation run, because rare events that cannot be generated in a
particular run may be discovered in another run. The chance of discovering them is also higher
with a larger number of samples.
By its nature, Subset Simulation gradually explores the failure events, including many which
are exotic to the user prior to simulation. The black swan events referred here are exotic not
only to the user, but also to Subset Simulation. They are not expected along the way the
samples are generated adaptively by MCMC. When this happens, it is likely that the CCDF
estimate has not accounted adequately for the characteristics of the failure mode associated
with the black swan events. The estimate can be significantly biased.
The issue with black swan events is a practical one lying between a perfectly biased and an
ergodic situation. If it is perfectly biased, then one would not be able to encounter the event
in the first place. One typical situation associated with black swan events is that when one
performs a few simulation runs there is a small number of runs that give a CCDF estimate with

196 Engineering Risk Assessment with Subset Simulation
very different characteristics. We first illustrate this issue with a simple example. Diagnostic
strategies are discussed later.
Example 5.7 Black swan eventLet X1 and X2 be i.i.d. standard Gaussian and the response Y be defined by
Y =
{X1 X1 ≤ a
X2 X1 > a(5.127)
Clearly, when Y is smaller than a it is associated with X1; when it is greater than a it is associated
with X2. The distribution of the samples (X1, X2) populating the failure event {Y > b} depends
very much on whether b is greater than a or not. For small values of b < a the “dominant
mode” that leads to failure is associated with X1 by X1 > b. For large values of b > a the
dominant mode is associated with X2 by X2 > b. A proper simulation run should be capable of
populating samples that capture these failure modes as the simulation level ascends. However,
this may not happen in a particular run if the samples of X2 at low simulation levels have not
populated near the region that allow them to further propagate to higher levels.
For illustration, let a = 2. We perform Subset Simulation with the following parameters as
before: p0 = 0.1, N = 500, and uniform proposal PDF with a maximum step length of w = 1.
Figure 5.13a shows the results from 10 independent runs. For reference, the exact solution is
shown with a dashed line. Elementary probability shows that the exact solution is given by
P(Y > b) =
{Φ(a) − Φ(b) + Φ(−a)Φ(−b) b ≤ a
Φ(−a)Φ(−b) b > a(5.128)
The results from the 10 runs agree quite well for b < 2. For b > 2, eight curves gather around
the exact solution. The remaining two exhibit very different characteristics in that they do not
-1 0 1 2 3 4 510
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
(a)
b
P(Y
>b
)
-1 0 1 2 3 4 510
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
(b)
b
P(Y
>b
)
Figure 5.13 Simulation results, Example 5.7. (a) Ten independent runs (solid lines). (b) Ensemble
average (solid line) and +/– standard deviation (dashed line). Exact solution – heavy dashed line.

Subset Simulation 197
-4 -2 0 2 4-4
-2
0
2
4Level 0
-4 -2 0 2 4-4
-2
0
2
4Level 1
-4 -2 0 2 4-4
-2
0
2
4Level 2
-4 -2 0 2 4-4
-2
0
2
4Level 3
X1
X2
-4 -2 0 2 4-4
-2
0
2
4Level 4
-4 -2 0 2 4-4
-2
0
2
4Level 5
(a) (b) (c)
(d) (e) (f)
Figure 5.14 Population of samples at different levels in a proper run, Example 5.7. (a)–(f) for Levels
0 to 5, respectively. Solid line – conditional boundary of the current level; dashed line – conditional
boundary of the next level.
have a second branch of increasing b values. They simply suggest that it is almost impossible
to have Y > 2, which is not correct.
For reference, Figure 5.13b shows the +/– one standard deviation interval of b based on
50 simulation runs, that is, ensemble statistics. The error interval increases significantly after
b > 2.
Figure 5.14 shows the population of samples for a “proper run,” where the samples are able
to propagate from a failure mode governed by X1 for small b < 2 to a mode governed by X2
for large b > 2. The critical stage is near Level 3, which relies on the samples with X2 > 2
to generate samples conditional on higher levels. If there were no samples at Level 3 with
X2 > 2, then it would not be possible to push the threshold level to a higher value, since then
all samples would have Y ≤ 2.
Figure 5.15 shows the correlation sequence estimated using the samples from the proper run.
At Level 2 and 3 the decay of the correlation sequence is especially slow, due to high rejection
of the candidates during MCMC. After Level 3 the correlation sequence decays quickly
again.
5.7.1 Diagnosis
The first issue with black swan events is whether they can be detected at all during simulation.
A high rejection rate can be one sign suggesting that the samples have difficulty propagating
to higher levels. This, of course, could be the nature of the problem; for example, Y has an

198 Engineering Risk Assessment with Subset Simulation
0 2 4 6 8
0
0.5
1
(a) (b) (c)
(d) (e) (f)
Level 0, γ1 = 0
0 2 4 6 8
0
0.5
1
Level 1, γ2 = 1.4
0 2 4 6 8
0
0.5
1
Level 2, γ3 = 6.9
0 2 4 6 8
0
0.5
1
ρ(k)
Lag k
Level 3, γ4 = 8.2
0 2 4 6 8
0
0.5
1
Level 4, γ5 = 2.8
0 2 4 6 8
0
0.5
1
Level 5, γ6 = 3.4
Figure 5.15 Correlation sequence in a proper run, Example 5.7. (a)–(f) for Levels 0 to 5, respectively.
upper bound, which should be examined for the problem at hand. Performing an independent
run with a larger N may help, although it cannot eliminate the problem. In this regard it is not
advised to reduce the spread of the proposal PDF without proper justification. Doing so may
prematurely screen out probable events, artificially rendering them to be black swans at higher
levels. Another, perhaps more effective, way is to examine if it is possible for the problem to
have black swans; for example, whether the response may bifurcate at some point to exhibit
different characteristics.
Once the black swan events are detected, the question is then how to properly account for
them in the simulation run. It should be noted that at this stage the events have to some extent
been accounted for by the results. The concern is whether they have been accounted for in
the right proportion, most often being underestimated. Their presence also tends to give high
estimation error compared to a proper simulation run. This is thus an efficiency issue. One
natural way is to separate the problem into different cases, perform Subset Simulation for
them separately, and then combine their results in conceptually the same manner as “stratified
sampling” (e.g., Rubinstein, 1981). Of course, this is necessary only when it is found that
Subset Simulation has difficulty generating samples that sufficiently cover the failure modes.
By MCMC, multiple chains, and propagating samples progressively, Subset Simulation has
some capability of discovering a variety of failure modes. It is not foolproof, however.
Example 5.8 Black swan event, stratified samplingIn Example 5.7, suppose we know a priori or from some trial runs that the response behaves
very differently depending on whether X1 > a. Then we may write using the theorem of total
probability:
P(Y > b) = P(Y > b|X1 ≤ a)P(X1 ≤ a) + P(Y > b|X1 > a)P(X1 > a) (5.129)

Subset Simulation 199
-1 0 1 2 3 4 510
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
(a) (b)
b
P(Y
>b
)
-1 0 1 2 3 4 510
-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
b
P(Y
>b
)Figure 5.16 Simulation result, Example 5.7 with stratified sampling. (a) Ten independent runs (solid
lines). (b) Ensemble average (solid line) and +/– standard deviation (dashed line). Exact solution – heavy
dashed line.
The probability P(X1 ≤ a) and hence P(X1 > a) = 1 − P(X1 ≤ a) is known because X1
follows a standard distribution. The remaining conditional probabilities P(Y > b|X1 ≤ a) and
P(Y > b|X1 > a), which should be viewed as a CCDF versus b, can be determined by Subset
Simulation where the conditioning on X1 should be exercised in the generation of samples.
The results are then combined to give P(Y > b) using Eq. (5.129). In each of these simulation
runs there are (hopefully) no black swans and so the efficiency should be similar to what can
normally be achieved.
Figure 5.16 shows the results using the stratified sampling concept, where p0 = 0.1, m = 6,
and N = 250 have been used for the two sub-problems so that the total number of function
evaluations is the same as before. This figure should be compared with Figure 5.13. The samples
have no problem propagating in each of the sub-problems. The results from different runs in
Figure 5.16a are qualitatively similar. The resulting estimate has much smaller estimation
variance, as indicated in Figure 5.16b.
Although this is a “toy example” with only two random variables, the general principle and
potential gain in efficiency are similar in more complicated problems.
5.8 Applications
Subset Simulation was originally developed for seismic risk analysis of building structures
subjected to stochastic earthquake motions (Au and Beck, 2000a, 2000b; Au, 2001; Au and
Beck, 2001; Au and Beck, 2003), where the problem involved a large number (theoretically
infinite) of random variables arising primarily from the time-domain stochastic description of
ground motions. Applications to different disciplines have appeared, for example, in aerospace
engineering (Pellissetti et al., 2006; Thunnissen et al., 2007a, 2007b), fire engineering (Au
et al., 2007b), geotechnical engineering (Phoon, 2008; Wang et al., 2010; Santoso et al., 2011a),
nuclear engineering (Marseguerra, 2011; Cadini et al., 2012; Zio and Pedroni 2009, 2011,

200 Engineering Risk Assessment with Subset Simulation
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
100
101
102
103
104
Uni
t c.o
.v.
Failure probability
x
Aerospace
Fire
Geotech
Nuclear
Structural
Urban canopy
Figure 5.17 Unit c.o.v. versus failure probability.
2012), structural engineering (Koutsourelakis et al., 2004; Jalayer and Beck, 2008; Augusti
and Ciampoli, 2008; Rajeev et al., 2008; Wetzel and Proppe, 2010; Smith and Banerjee, 2012)
and meteorology (Wang et al., 2011a). See Schueller et al. (2004), Schueller and Pradlewarter
(2007), and Au et al. (2007a) for performance of Subset Simulation in a set of benchmark
problems. Implementing Subset Simulation on a spreadsheet (Au et al., 2010; Wang et al.,2011b) or a parallel processing platform (Pellissetti, 2009; Pellissetti and Schueller, 2009;
Patelli et al., 2012) has also been studied.
Figure 5.17 shows the unit c.o.v. Δ versus the failure probability pF based on results
reported in the literature. Admittedly, the data set here is dominated by structural engineering
applications, primarily because that was the discipline where the method was developed and
where many subsequent developments were made. The results reported here are by no means
complete as they are based on journal papers known to the authors at the time of writing and
with sufficient details reported on the unit c.o.v. The dashed line in the figure shows the unit
c.o.v. of Direct Monte Carlo, which is theoretically given by Δ =√
(1 − pF)∕pF . Naturally,
the unit c.o.v. of the Subset Simulation estimator depends on a number of factors, such as
the failure probability, the choice of proposal PDF, the parameterization of random variables,
system complexity, and so on. The number of random variables in the problems reported in
the figure ranges from a few tens to thousands. Most problems are nonlinear. The points in
the figure scatter around a region that grows at a significantly slower pace with decreasing
failure probability. They almost coincide with Direct Monte Carlo at large probability (0.1) as
it corresponds to Level 0.
Figure 5.18 gives another perspective by showing on the y-axis the total number of samples
NT required to achieve a specified c.o.v. 𝛿 in the failure probability estimate. This is theoret-
ically given by NT = (Δ∕𝛿)2, where 𝛿 = 30% has been used in the figure. Again, the dashed
line shows the total number of samples required by Direct Monte Carlo, which is theoretically
given by NT = (1 − pF)∕(pF𝛿2).

Subset Simulation 201
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
102
103
104
105
106
107
108
x
Aerospace
Fire
Geotech
Nuclear
Structural
Urban canopy
Failure probability
No.
of s
ampl
es fo
r 30
% c
.o.v
Figure 5.18 Computational effort versus failure probability.
5.9 Variants
As the basic idea behind Subset Simulation is quite fundamental, there are many ways it can
be used to develop algorithms with higher efficiency or to solve other related problems. In this
subsection we outline a few variants of Subset Simulation that have appeared in the literature.
Again, this is by no means complete as this body of knowledge is still growing.
Efficiency gains can often be achieved beyond the standard Subset Simulation algorithm
by a better choice of proposal distributions, incorporating prior information, or exploiting the
special structure of the problem, although successes are of a varying degree depending on the
problem. One natural objective is to reduce the correlation between the conditional samples
along the Markov chain, that is, reducing the factor 𝛾j in Eq. (5.20). This has been achieved by
modifying the rejection mechanism in MCMC in Zuev and Katafygiotis (2011) and Santoso
et al. (2011b). For some problems where there is a causal relationship between the response
and some of the random variables, Ching et al. (2005a, 2005b) modified the MCMC algorithm
that increases the acceptance rate of the candidate sample without systemically increasing
its correlation with the current sample. This is along the spirit of “splitting,” which applies
specifically to Markovian systems and for which there is an established body of literature
(Kahn and Harris, 1951; Villen-Altamirano and Villen-Altamiran, 1991; Glasserman et al.,1999).
Subset Simulation has also been combined with computational learning tools such as the
Support Vector Machine (Bourinet et al., 2011) and neural networks Papadopoulos et al.(2012). The information from meta-models or surrogate response, when available, can also
be incorporated (Au, 2007; Mathews et al., 2011). Strategies have been proposed to exploit
the characteristics of the class of systems under study and gain efficiency by using a more
efficient method tailored to the part of the problem that is analytically tractable (Katafygiotis
and Cheung 2005; Yuan et al., 2010).

202 Engineering Risk Assessment with Subset Simulation
Subset Simulation has been incorporated into reliability-based optimization algorithms
(Jensen, 2005; Ching and Hsieh, 2007a; Jensen and Beer, 2010; Valdebenito and Schueller,
2010; Dubourg et al., 2011; Yang and Hsieh, 2011). It has also been extended to solving
reliability “design sensitivity” problems, where the target is to obtain the failure probability
for different choices of design parameters. From first principle this problem requires repeated
reliability analyses, for example, repeated runs of Subset Simulation. By artificially consider-
ing the design parameters as random in the problem, it is possible to extract design sensitivity
information based on a single simulation run (Au, 2005). Algorithms for design sensitivity or
reliability-based optimization have been developed based on this idea, for example, Ching and
Hsieh (2007b), Song et al. (2009), Taflanidis and Beck (2008a, 2008b, 2009). By establishing
an analogy between rare event and optimal event, Subset Simulation has been adapted for solv-
ing constrained optimization problems with potentially a large number of design parameters
and constraints (Li and Au, 2010; Wang et al., 2011c, 2011d).
References
Au, S.K. (2001) On the Solution of First Excursion Problems by Simulation with Applications to Probabilistic
Seismic Performance Assessment. PhD Thesis in Civil Engineering, Division of Engineering and Applied Science,
California Institute of Technology, California, USA.
Au, S.K. (2005) Reliability-based design sensitivity by efficient simulation. Computers and Structures, 83(14),
1048–1061.
Au, S.K. (2007) Augmenting approximate solutions for consistent reliability analysis. Probabilistic EngineeringMechanics, 22(1), 77–87.
Au, S.K. and Beck, J.L. (2000a) Subset simulation: a new approach to calculating small failure probabilities. Pro-
ceedings of International Conference on Monte Carlo Simulation, 18–21 June 2000, Monte Carlo, Monaco.
Au, S.K. and Beck, J.L. (2000b) Calculation of first passage probabilities by subset simulation. Proceedings of
Joint Specialty Conference on Probabilistic Mechanics and Structural Reliability, 24–26 July 2000, Notre Dame,
Indiana, USA.
Au, S.K. and Beck, J.L. (2001) Estimation of small failure probabilities in high dimensions by subset simulation.
Probabilistic Engineering Mechanics, 16(4), 263–277.
Au, S.K. and Beck, J.L. (2003) Subset simulation and its applications to seismic risk based on dynamic analysis.
Journal of Engineering Mechanics, 129(8), 901–917.
Au, S.K., Cao, Z.J., and Wang, Y. (2010) Implementing advanced Monte Carlo under spreadsheet environment.
Structural Safety, 32(5), 281–292
Au, S.K., Ching, J., and Beck, J.L. (2007a) Application of subset simulation methods to reliability benchmark
problems. Structural Safety, 29(3), 183–193.
Au, S.K., Wang, Z.H., and Lo, S.M. (2007b) Compartment fire risk analysis by advanced Monte Carlo method.
Engineering Structures, 29(9), 2381–2390.
Augusti, G. and Ciampoli, M. (2008) Performance-based design in risk assessment and reduction. ProbabilisticEngineering Mechanics, 23, 496–508.
Bourinet, J.M., Deheeger, F., and Lemaire, M. (2011) Assessing small failure probabilities by combined subset
simulation and Support Vector Machines. Structural Safety, 33, 343–353.
Cadini, F., Avram, D., Pedroni, N., and Zio, E. (2012) Subset Simulation of a reliability model for radioactive waste
repository performance assessment. Reliability Engineering and System Safety, 100, 75–83.
Ching, J., Au, S.K., and Beck, J.L. (2005a) Reliability estimation of dynamical systems subject to stochastic excitation
using Subset Simulation with Splitting. Computer Methods in Applied Mechanics and Engineering, 194(12–16),
1557–1579.
Ching, J., Beck, J.L., and Au, S.K. (2005b) Hybrid Subset Simulation Method for reliability estimation of dynamical
systems subjected to stochastic excitation. Probabilistic Engineering Mechanics, 20(3), 199–214.
Ching, J. and Hsieh, Y.H. (2007a) Approximate reliability-based optimization using a three-step approach based on
subset simulation. Journal of Engineering Mechanics, 133(4), 481–493.

Subset Simulation 203
Ching, J. and Hsieh, Y.H. (2007b) Local estimation of failure probability function and its confidence interval with
maximum entropy principle. Probabilistic Engineering Mechanics, 22(1), 39–49.
Corless, R.M., Gonnet, G.H., Hare, D.E.G., et al. (1996) On the lambert W function. Advances in ComputationalMathematics, 5, 329–359.
Dubourg, V., Sudret, B., and Bourinet, J.M. (2011) Reliability-based design optimization using kriging surrogates
and subset simulation. Structural and Multidisciplinary Optimization, 44, 673–690.
Glasserman, P., Heidelberger, P., Shahabuddin, P., and Zajic, T. (1999) Multilevel splitting for estimating rare event
probabilities. Operations Research, 47(4), 585–600.
Hsu, W.C. and Ching, J. (2010) Evaluating small failure probabilities of multiple limit states by parallel subset
simulation. Probabilistic Engineering Mechanics, 25(3), 291–304.
Li, H.S. and Au, S.K. (2010) Design optimization using Subset Simulation algorithm. Structural Safety, 32(6),
384–392.
Jalayer, F. and Beck, J. L. (2008) Effects of two alternative representations of ground-motion uncertainty on proba-
bilistic seismic demand assessment of structures. Earthquake Engineering and Structural Dynamics, 37, 61–79.
Jensen, H.A. (2005) Structural optimization of linear dynamical systems under stochastic excitation: A moving
reliability database approach. Computer Methods in Applied Mechanics and Engineering, 194(12–16), 1757–
1778.
Jensen, H.A. and Beer, M. (2010) Discrete–continuous variable structural optimization of systems under stochastic
loading. Structural Safety, 32, 293–304.
Kahn, H. and Harris, T.E. (1951) Estimation of particle transmission by random sampling, National Bureau ofStandards. Applied Mathematics Series, 12, 27–30.
Katafygiotis, L.S. and Cheung, S.H. (2005) A two-stage Subset Simulation-based approach for calculating the
reliability of inelastic structural systems subjected to Gaussian random excitations. Computer Methods in AppliedMechanics and Engineering, 194, 1581–1595.
Koutsourelakis, P.S., Pradlwarter, H.J., and Schueller, G.I. (2004) Reliability of structures in high dimensions, part I:
algorithms and applications. Probabilistic Engineering Mechanics, 19, 409–417.
Marseguerra, M. (2011) An efficient Monte Carlo-SubSampling approach to first passage problems. Annals of NuclearEngineering, 38, 410–417.
Mathews, T.S., Arul, A.J., Parthasarathy, U., et al. (2011) Passive system reliability analysis using response con-
ditioning method with an application to failure frequency estimation of decay heat removal of PFBR. NuclearEngineering and Design, 241, 2257–2270.
Papadopoulos, V., Giovanis, D.G., Lagaros, N.D., and Papadrakakis, M. (2012) Accelerated subset simulation with
neural networks for reliability analysis. Computer Methods in Applied Mechanics and Engineering, 223–224,
70–80.
Patelli, E., Panayirci, H.M., Broggi, M., et al. (2012) General purpose software for efficient uncertainty management
of large finite element models. Finite Elements in Analysis and Design, 51, 31–48.
Pellissetti, M.F. (2009) Parallel processing in structural reliability. Structural Engineering and Mechanics, 32(1),
95–126.
Pellissetti, M.F. and Schueller, G.I. (2009) Scalable uncertainty and reliability analysis by integration of advanced
Monte Carlo simulation and generic finite element solvers. Computers and Structures, 87, 930–947.
Pellissetti, M.F., Schueller, G.I., Pradlwarter, H.J., et al. (2006) Reliability analysis of spacecraft structures under
static and dynamic loading. Computers and Structures, 84, 1313–1325.
Phoon, K.K. (ed.) (2008) Reliability-Based Design in Geotechnical Engineering: Computations and Applications,
Taylor & Francis, Singapore.
Rajeev, P., Franchin, P., and Pinto, P.E. (2008) Increased accuracy of vector-IM-based seismic risk assessment. Journalof Earthquake Engineering, 12(S1), 111–124.
Rubinstein, R.Y. (1981) Simulation and the Monte Carlo Method, John Wiley, New York.
Santoso, A.M., Phoon, K.K., and Quek, S.T. (2011a) Effects of soil spatial variability on rainfall-induced landslides.
Computers and Structures, 89, 893–900.
Santoso, A.M., Phoon, K.K., and Quek, S.T. (2011b) Modified Metropolis–Hastings algorithm with reduced chain
correlation for efficient subset simulation. Probabilistic Engineering Mechanics, 26, 331–341.
Schueller, G.I. and Pradlwarter, H.J. (2007) Benchmark study on reliability estimation in higher dimensions of
structural systems – an overview. Structural Safety, 29, 167–182.
Schueller, G.I., Pradlwarter, H.J., and Koutsourelakis, P.S. (2004) A critical appraisal of reliability estimation proce-
dures for high dimensions. Probabilistic Engineering Mechanics, 19, 463–474.

204 Engineering Risk Assessment with Subset Simulation
Smith, B. and Banerjee, B. (2012) Reliability of inserts in sandwich composite panels. Composite Structures, 94,
820–829.
Song, S.F., Lu, Z.Z., and Qiao, H.W. (2009) Subset simulation for structural reliability sensitivity analysis. ReliabilityEngineering and System Safety, 94, 658–665.
Taflanidis, A.A. and Beck, J.L. (2008a) An efficient framework for optimal robust stochastic system design using
stochastic simulation. Computer Methods in Applied Mechanics and Engineering, 198(1), 88–101.
Taflanidis, A.A. and Beck, J.L. (2008b) Stochastic subset optimization for optimal reliability problems. ProbabilisticEngineering Mechanics, 23, 324–338.
Taflanidis, A.A. and Beck, J.L. (2009) Stochastic subset optimization for reliability optimization and sensitivity
analysis in system design. Computers and Structures, 87(5–6), 318–331.
Thunnissen, D.P., Au, S.K., and Swenka, E.R. (2007a) Uncertainty quantification in the preliminary design of a
spacecraft attitude control system. AIAA Journal of Aerospace Computing, Information, and Communication, 4,
902–917.
Thunnissen, D.P., Au, S.K., and Tsuyuki, G.T. (2007b) Uncertainty quantification in estimating critical spacecraft
component temperatures. AIAA Journal of Thermophysics and Heat Transfer, 21(2), 422–430.
Valdebenito, M.A. and Schueller, G.I. (2010) Reliability-based optimization considering design variables of discrete
size. Engineering Structures, 32, 2919–2930.
Villen-Altamirano, M. and Villen-Altamirano, J. (1991) RESTART: a method for accelerating rare event simulations,
in Queueing, Performance and Control in ATM (eds J.W. Cohen and C.D. Pack), Elsevier Science Publishers,
Amsterdam, pp. 71–76.
Wang, Z.H., Bou-Zeid, E., Au, S.K., and Smith, J.A. (2011a) Analyzing the sensitivity of WRF”s single-layer urban
canopy model to parameter uncertainty using advanced Monte Carlo simulation. Journal of Applied Meteorologyand Climatology, 50(9), 1795–1814.
Wang, Y., Cao, Z., and Au, S.K. (2010) Efficient Monte Carlo Simulation of parameter sensitivity in probabilistic
slope stability analysis. Computers and Geotechnics, 37, 1015–1022.
Wang, Y., Cao, Z.J., and Au, S.K. (2011b) Practical reliability analysis of slope stability by advanced Monte Carlo
simulations in a spreadsheet. Canadian Geotechnical Journal, 48, 162–172.
Wang, Q., Lu, Z.Z., and Tang, Z.C. (2011c) A novel global optimization method of truss topology. TechnologicalSciences, 54(10), 2723–2729.
Wang, Q., Lu, Z.Z., and Zhou, C. (2011d) New topology optimization method for wing leading-edge ribs. Journal ofAircraft, 48(5), 1741–1748.
Wetzel, C. and Proppe, C. (2010) Stochastic modeling in multibody dynamics: aerodynamic loads on ground vehicles.
Journal of Computational and Nonlinear Dynamics, ASME, 5, 031009.
Yang, I.T. and Hsieh, Y.H. (2011) Reliability-based design optimization with discrete design variables and non-smooth
performance functions: AB-PSO algorithm. Automation in Construction, 20, 610–619.
Yuan, X.K., Lu, Z.Z., and Qiao, H.W. (2010) Conditional probability Markov chain simulation based reliability
analysis method for nonnormal variables. Technological Sciences, 53(5), 1434–1441.
Zio, E. and Pedroni, N. (2009) Estimation of the functional failure probability of a thermal–hydraulic passive system
by Subset Simulation. Nuclear Engineering and Design, 239, 580–599.
Zio, E. and Pedroni, N. (2011) How to effectively compute the reliability of a thermal–hydraulic nuclear passive
system. Nuclear Engineering and Design, 241, 310–327.
Zio, E. and Pedroni, N. (2012) Monte Carlo simulation-based sensitivity analysis of the model of a thermal–hydraulic
passive system. Reliability Engineering and System Safety, 107, 90–106.
Zuev, K.M. and Katafygiotis, L.S. (2011) Modified Metropolis–Hastings algorithm with delayed rejection. Proba-bilistic Engineering Mechanics, 26, 405–412.