Embed Size (px)
Citation preview

Syllabus
:080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com
Syllabus for Engineering Mechanics
ME: Free-Body Diagrams and Equilibrium, Trusses and Frames, Virtual Work, Kinematics and
Dynamics of Particles and of Rigid Bodies in Plane Motion, Impulse and Momentum (Linear and
Angular) and Energy Formulations, Collisions
CE: System of Forces, Free-Body Diagrams, Equilibrium Equations, Internal Forces in Structures,
Friction and its Applications, Kinematics of Point mass and Rigid Body, Centre of Mass, Euler’s
Equations of Motion, Impulse-Momentum, Energy Methods, Principles of Virtual Work.
Analysis of GATE Papers
Year ME CE
2015 9.00 5.00
2014 4.75 3.00
2013 3.00 6.00
2012 1.00 9.00
2011 5.00 7.00
2010 2.00 9.00
2009 3.00 12.00
2008 3.33 17.00
2007 2.00 13.00
2006 2.67 21.00
Overall Percentage 3.57% 10.20%

Contents
:080-617 66 222, [email protected] ©Copyright reserved.Web:www.thegateacademy.com I
Contents
Chapters Page No.
#1. Introduction 1
Introduction 1
#2. Free Body Diagram and Equilibrium 2 – 28
Introduction 2
Equivalent Force System 2 – 3
Newton’s Laws of Motion 3
Equilibrium and Free Body Diagrams 3
Coplanar Concurrent Forces 4 – 6
Coplanar Non-Concurrent Forces 7
Condition for Body in Equilibrium 7 – 8
Friction 8
Solved Examples 9 – 24
Assignment 25 – 27
Answer Keys & Explanations 27 – 28
#3. Trusses and Frames 29 – 42
Trusses and Frames 29 – 31
Solved Examples 31 – 38
Assignment 39 – 40
Answer Keys & Explanations 40 – 42
#4. Friction 43 – 51
Introduction 43
Dry Friction 43 – 44
Laws of Dry Friction 44 – 45
Rolling Resistance 45
Force of Friction on a Wheel 46 – 47
Assignment 48 – 49
Answer Keys & Explanations 50 – 51

Contents
:080-617 66 222, [email protected] ©Copyright reserved.Web:www.thegateacademy.com II
#5. Principle of Virtual Work 52 – 59
Principle of Virtual Work 52 – 54
Solved Examples 54 – 59
#6. Kinematics and Dynamics of Particle 60 – 87
Introduction 60
Kinematics of Rectilinear Motion 60 – 65
Kinematics of Curvilinear Motion 65 – 66
Acceleration Analysis 66 – 77
Impulse and Momentum 77 – 79
Collision of Elastic Bodies 79 – 82
Assignment 83 – 85
Answer Keys & Explanations 85 – 87
#7. Work & Energy Methods 88 – 94
Work and Energy 88 – 89
Conservative/Non-Conservative Force Fields and Energy Balance 89 – 93
Assignment 94
Answer Keys & Explanations 94
#8. Kinematics and Dynamics of Rigid Body 95 – 107
Center of mass and Center of Gravity 95
Euler’s Equation of Motion 95 – 96
Moment of Inertia 96 – 102
Conservation of Angular Momentum 103 – 104
Assignment 105 – 106
Answer Keys & Explanations 106 – 107
Module Test 108 – 117
Test Questions 108 – 113
Answer Keys & Explanations 114 – 117
Reference Books 118

: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 1
“Try not to become a man of success, but rather
try to become a man of value.”
….Albert Einstein
Introduction
Introduction Mechanics is the science which deals with the action of forces on different types of bodies either in
motion or at rest.
Engineering mechanics is the application of mechanics to solve problems involving common
engineering elements.
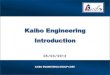
Engineering Mechanics can be broadly classified as,
In this course material we will study about the mechanics of particles and rigid bodies.
Particle: It is a portion of matter which is indefinitely small in size.
Rigid Body: A rigid body may be defined as a body in which the relative positions of any two
particles do not change under the action of forces. Statics deals primarily with the calculation of
external forces which act on rigid body in equilibrium.
Engineering Mechanics
Mechanics of Fluids Mechanics of Solids
Rigid Bodies Deformable Bodies
Statics Dynamics
Kinematics Kinetics
Strength of Materials,
Theory of Elasticity,
Theory of Plasticity
CH
AP
TE
R
1

: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 2
"I am a slow walker ... but I
never walk backwards."
…..Abraham Lincoln
Free Body Diagram
and Equilibrium Learning Objectives After reading this chapter, you will know:
1. Equivalent Force System, Newton’s Law of Motion
2. Equilibrium and Free Body Diagrams, Type of Equilibrium
3. Static Friction, Virtual Work, Trusses and Frames, Statics Related Problems
Introduction
Statics deals with system of forces that keeps a body in equilibrium. In other words the resultant of
force systems on the body are zero.
Force
A force is completely defined only when the following three characters are specified.
Magnitude
Point of Application
Line of action/Direction
Scalar and Vector
A quantity is said to be scalar if it is completely defined by its magnitude alone. e.g. length, energy,
work etc. A quantity is said to be vector if it is completely defined only when its magnitude and
direction is specified.
E.g.: Force, Acceleration.
Equivalent Force System Coplanar Force System: If all the forces in the system lie in a single plane, it is called coplanar force
system.
Concurrent Force System: If line of action of all the forces in a system passes through a single point it
is called concurrent force system.
Collinear Force System: In a system, all the forces parallel to each other, if line of action of all forces
lie along a single line then it is called a collinear force system.
CH
AP
TE
R
1
2

Free Body Diagram and Equilibrium
: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 3
Force System Example Coplanar like parallel force is straight Weight of stationary train on rail off the track Coplanar concurrent force Forces on a rod resting against wall Coplanar non- concurrent force Forces on a ladder resting against a wall when a person
stands on a rung which is not at its center of gravity Non- coplanar parallel force The weight of benches in class room Non- coplanar concurrent force A tripod carrying camera Non- coplanar non-concurrent force Forces acting on moving bus
Newton’s Laws of Motion First Law: Everybody continues in its state of rest or of uniform motion in a straight line unless it is
compelled to change that state by force acting on it.
Second Law: The rate of change of momentum of a body is directly proportional to the applied force
& it takes place in the direction in which the force acts.
F ∝ (mdv
dt)
Third Law: For every action, there is an equal and opposite reaction. Principle of Transmissibility of Forces: The state of rest or motion of rigid body is unaltered if a force action on a body is replaced by another force of the same magnitude and direction but acting anywhere on the body along the line of action of applied forces.
Parallelogram Law of Forces: If two forces acting simultaneously on a body at a point are
represented in magnitude and direction by the two adjacent sides of a parallelogram their resultant
is represented in magnitude and direction by the diagonal of the parallelogram which passes
through the point of intersection of the two sides representing the forces.
Equilibrium and Free Body Diagrams Equilibrium: Any system of forces which keeps the body at rest is said to be equilibrium, or when the
condition of the body is unaffected even though a number of forces acted upon it, is said to in
equilibrium.
Laws of Equilibrium
Force Law of Equilibrium: For any system of forces keeping a body in equilibrium, the algebraic sum of forces, in any direction is zero, ie. ΣF = 0
Moment Law of Equilibrium: For any system of forces keeping a body in equilibrium, the algebraic sum of the moments of all the forces about any point in their plane is zero. i.e., ΣM = 0 ΣF × d = 0 This law is applicable only to coplanar, non-concurrent force systems.
A
P
P

Free Body Diagram and Equilibrium
: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 4
Coplanar Concurrent Forces Triangle Law of Forces
If two forces acting simultaneously on a body are represented by the sides of triangle taken in order,
their resultant is represented by the closing side of the triangle taken in the opposite order.
Polygon Law of Forces
If a number of forces acting at a point be represented in magnitude and direction by the sides of a
polygon in order, then the resultant of all these forces may be represented in magnitude and
direction by the closing side of the polygon taken in opposite order.
Resultant, (R) = √P12 + P2
2 + 2P1P2cosθ
tan α = (P2sinθ
P1+P2cosθ)
Where,
θ = Angle between two forces, α = Inclination of resultant with force P1
When forces acting on a body are collinear, their resultant is equal to the algebraic sum of the forces.
Lami’s Theorem: (Only three coplanar concurrent forces) If a body is in equilibrium under the action
of three forces, then each force is proportional to the sine of the angle between the other two forces.
P1
sinα=
P2
sinβ=
P3
sinγ
α
γ
β
P1 P2
P3
β
α P2
P1
P3
a
b
c
P2
B C
D E
θ P1
θ α θ
A
P1
P2 P3
P4
P2
P4
C
P1
P3
E
R
B
A
R2
R1
D

Free Body Diagram and Equilibrium
: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 5
Free Body Diagram: A free body diagram is a pictorial representation used to analyze the forces
acting on a free body. Once we decide which body or combination of bodies to analyze, we then treat
this body or combination as a single body isolated from all our surrounding bodies.
A free body diagram shows all contact and non-contact forces acting on the bodies.
Sample Free Body Diagrams
A Ladder Resting on Smooth Wall
A Cantilever Beam
A Block on a Ramp
In a free body diagram all the contacts/supports are replaced by reaction forces which will exert on
the structure. A mechanical system comprises of different types of contacts/supports.
mg m
Free Body Diagram of Just the Block
j
i
F3 F2 F1
V V V V
F
M W=m
g
y
x
P
600N
G
W 600N
R1
P R2

Free Body Diagram and Equilibrium
: 080-617 66 222, [email protected] ©Copyright reserved. Web:www.thegateacademy.com 6
Types of Contacts/Supports
Following types of mechanical contacts can be found in various structures,
Flexible Cable, Belt, Chain or Rope
Force exerted by the cable is always a tension away from the body in the direction of the cables.
Smooth Surfaces
Contact force is compressive and is normal to the surfaces.
Rough Surfaces Rough surfaces are capable of supporting a tangential component F (frictional force as well as a normal component N of the resultant R.
Roller Support
Roller, rocker or ball support transmits a compressive force normal to supporting surface.
Freely Sliding Guide
Collar or slider support force normal to guide only. There is no tangential force as surfaces are considered to be smooth.
Pin Connection
A freely hinged pin supports a force in any direction in the plane normal to the axis; usually shown as two components Rx and Ry. A pin not free to turn also supports a couple M.
Built in or Fixed End
A built-in or fixed end supports an axial force F, a transverse force V, and a bending moment M.
A
M
F
V
A
Weld
O
r
A
R
y
Rx
Rx
Ry
M
N N
N
N
N
θ
θ
Weight of Cable Negligible
Weight of Cable not Negligible θ
θ T
T