Embed Size (px)
Citation preview

Engineering Analysis with Boundary Elements 70 (2016) 31–39
Contents lists available at ScienceDirect
Engineering Analysis with Boundary Elements
http://d0955-79
n CorrCity Un
E-m
journal homepage: www.elsevier.com/locate/enganabound
Buckling analysis of graphene sheets embedded in an elastic mediumbased on the kp-Ritz method and non-local elasticity theory
Yang Zhang a,b, L.W. Zhang a,c,n, K.M. Liew a,d, J.L. Yu b
a Department of Architecture and Civil Engineering, City University of Hong Kong, Kowloon, Hong Kong SAR, Chinab CAS Key Laboratory of Mechanical Behavior and Design of Materials, University of Science and Technology of China, Chinac College of Information Science and Technology, Shanghai Ocean University, Shanghai 201306, Chinad City University of Hong Kong Shenzhen Research Institute Building, Shenzhen Hi-Tech Industrial Park, Nanshan District, Shenzhen, China
a r t i c l e i n f o
Article history:Received 29 December 2015Received in revised form29 May 2016Accepted 30 May 2016Available online 10 June 2016
Keywords:BucklingGrapheneWinkler modelNon-local elasticity theory
x.doi.org/10.1016/j.enganabound.2016.05.00997/& 2016 Published by Elsevier Ltd.
esponding author at: Department of Architeiversity of Hong Kong, Kowloon, Hong Kong Sail address: [email protected] (L.W. Zhan
a b s t r a c t
Graphene finds application in nanoscale electronic devices, nano sensors and nanocomposites in whichgraphene sheets usually rest on an elastic medium. Buckling of graphene sheets can occur in suchstructures, which significantly influences its performance. Therefore, it is essential to investigate thebuckling behavior of graphene for better engineering design and manufacture. The present work pro-vides an element-free kp-Ritz framework to analyze the buckling behavior of graphene. The element-freekp-Ritz method is first implemented to investigate the buckling behavior of single-layered graphenesheets (SLGSs) embedded in elastic foundations, based on the classical plate theory (CLP), incorporatingthe non-local elasticity theory, which takes small effects into account when dealing with nanostructures.AWinkler-type model is adopted to simulate the functioning of the elastic medium. Numerical solutionsfor critical buckling loads of SLGSs are obtained by solving the governing differential equations derivedfrom the principle of minimum potential energy using the element-free kp-Ritz method. The concepts ofnon-local parameter effects and non-local effects are distinguished. The influence of non-local para-meters for both side length and aspect ratio on critical buckling loads of SLGSs is analyzed. Additionally,the effects of non-local parameters and the Winkler modulus parameter on the buckling patterns arediscussed.
& 2016 Published by Elsevier Ltd.
1. Introduction
In recent years, carbon nanostructures have drawn increasingattention from researchers; applications are being extended fromsuperfast microelectronics, modern aerospace and nanocompo-sites to micro electro-mechanical systems (MEMS), nano electro-mechanical systems (NEMS), biomedical and bioelectricals. Na-nostructure-based products contain ultra-capacitors, gas graphenetransistors, solar cells, nanoresonators, batteries, mammalian andmicrobial detection, diagnosis devices and ultra-strength compo-site materials, etc. [1]. The vast potential for applications lies in theextraordinary properties of nanostructures compared to tradi-tional materials, such as high mechanical strength, extrusiveelectronic conductivity and outstanding thermal conductivity, etc.[2–4].
A single-layered graphene sheet [5], which comprises carbonatoms packed in a hexagonal lattice with a carbon–carbon distance
cture and Civil Engineering,AR, China.g).
of 0.142 nm, is the basis of nanomaterials since the majority ofnanostructures such as carbon nanotubes, carbon nanocones, na-norings, fullerenes etc. are regarded as deformed graphene sheets.Thus, simulations of single-layered graphene sheets is an ele-mentary issue in the analysis of nanostructures [6]. Graphenesheets for MEMS and NEMS applications usually resting on anelastic medium instead of being suspended. Moreover, due to theexcellent structural performance and multifunctional character-istics of graphene-polymer nano-composites, it is considered oneof the most promising engineering nanostructures [7–10]. Thus,stability response of graphene sheets as MEMS and NEMS com-ponents become an important research topic, therefore, it is es-sential to understand the buckling behavior of graphene sheets onelastic medium so as for better engineering design andmanufacture.
Because of very small dimensions involved, it is difficult toexperimentally investigate the behavior of nanostructures sincethere are limits in terms of high experimental cost and timeconsuming. Moreover, it is difficult to manipulate and measure theresponse of nano-scale specimens due to the limitation of pro-duction process. Therefore, theoretical and numerical approachesare becoming increasingly significant for simulating
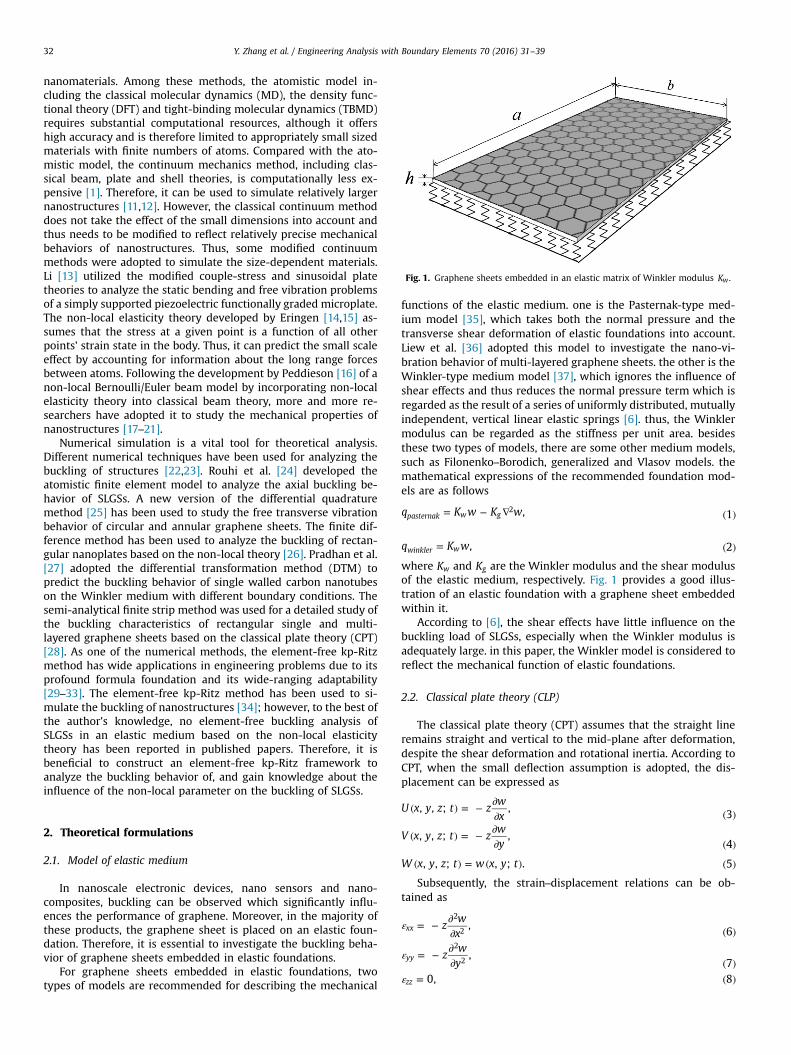
Fig. 1. Graphene sheets embedded in an elastic matrix of Winkler modulus Kw .
Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–3932
nanomaterials. Among these methods, the atomistic model in-cluding the classical molecular dynamics (MD), the density func-tional theory (DFT) and tight-binding molecular dynamics (TBMD)requires substantial computational resources, although it offershigh accuracy and is therefore limited to appropriately small sizedmaterials with finite numbers of atoms. Compared with the ato-mistic model, the continuum mechanics method, including clas-sical beam, plate and shell theories, is computationally less ex-pensive [1]. Therefore, it can be used to simulate relatively largernanostructures [11,12]. However, the classical continuum methoddoes not take the effect of the small dimensions into account andthus needs to be modified to reflect relatively precise mechanicalbehaviors of nanostructures. Thus, some modified continuummethods were adopted to simulate the size-dependent materials.Li [13] utilized the modified couple-stress and sinusoidal platetheories to analyze the static bending and free vibration problemsof a simply supported piezoelectric functionally graded microplate.The non-local elasticity theory developed by Eringen [14,15] as-sumes that the stress at a given point is a function of all otherpoints' strain state in the body. Thus, it can predict the small scaleeffect by accounting for information about the long range forcesbetween atoms. Following the development by Peddieson [16] of anon-local Bernoulli/Euler beam model by incorporating non-localelasticity theory into classical beam theory, more and more re-searchers have adopted it to study the mechanical properties ofnanostructures [17–21].
Numerical simulation is a vital tool for theoretical analysis.Different numerical techniques have been used for analyzing thebuckling of structures [22,23]. Rouhi et al. [24] developed theatomistic finite element model to analyze the axial buckling be-havior of SLGSs. A new version of the differential quadraturemethod [25] has been used to study the free transverse vibrationbehavior of circular and annular graphene sheets. The finite dif-ference method has been used to analyze the buckling of rectan-gular nanoplates based on the non-local theory [26]. Pradhan et al.[27] adopted the differential transformation method (DTM) topredict the buckling behavior of single walled carbon nanotubeson the Winkler medium with different boundary conditions. Thesemi-analytical finite strip method was used for a detailed study ofthe buckling characteristics of rectangular single and multi-layered graphene sheets based on the classical plate theory (CPT)[28]. As one of the numerical methods, the element-free kp-Ritzmethod has wide applications in engineering problems due to itsprofound formula foundation and its wide-ranging adaptability[29–33]. The element-free kp-Ritz method has been used to si-mulate the buckling of nanostructures [34]; however, to the best ofthe author's knowledge, no element-free buckling analysis ofSLGSs in an elastic medium based on the non-local elasticitytheory has been reported in published papers. Therefore, it isbeneficial to construct an element-free kp-Ritz framework toanalyze the buckling behavior of, and gain knowledge about theinfluence of the non-local parameter on the buckling of SLGSs.
2. Theoretical formulations
2.1. Model of elastic medium
In nanoscale electronic devices, nano sensors and nano-composites, buckling can be observed which significantly influ-ences the performance of graphene. Moreover, in the majority ofthese products, the graphene sheet is placed on an elastic foun-dation. Therefore, it is essential to investigate the buckling beha-vior of graphene sheets embedded in elastic foundations.
For graphene sheets embedded in elastic foundations, twotypes of models are recommended for describing the mechanical
functions of the elastic medium. one is the Pasternak-type med-ium model [35], which takes both the normal pressure and thetransverse shear deformation of elastic foundations into account.Liew et al. [36] adopted this model to investigate the nano-vi-bration behavior of multi-layered graphene sheets. the other is theWinkler-type medium model [37], which ignores the influence ofshear effects and thus reduces the normal pressure term which isregarded as the result of a series of uniformly distributed, mutuallyindependent, vertical linear elastic springs [6]. thus, the Winklermodulus can be regarded as the stiffness per unit area. besidesthese two types of models, there are some other medium models,such as Filonenko–Borodich, generalized and Vlasov models. themathematical expressions of the recommended foundation mod-els are as follows
= − ∇ ( )q K w K w, 1pasternak w g2
= ( )q K w, 2winkler w
where Kw and Kg are the Winkler modulus and the shear modulusof the elastic medium, respectively. Fig. 1 provides a good illus-tration of an elastic foundation with a graphene sheet embeddedwithin it.
According to [6], the shear effects have little influence on thebuckling load of SLGSs, especially when the Winkler modulus isadequately large. in this paper, the Winkler model is considered toreflect the mechanical function of elastic foundations.
2.2. Classical plate theory (CLP)
The classical plate theory (CPT) assumes that the straight lineremains straight and vertical to the mid-plane after deformation,despite the shear deformation and rotational inertia. According toCPT, when the small deflection assumption is adopted, the dis-placement can be expressed as
( ) = − ∂∂ ( )U x y z t zwx
, , ; , 3
( ) = − ∂∂ ( )
V x y z t zwy
, , ; ,4
( ) = ( ) ( )W x y z t w x y t, , ; , ; . 5
Subsequently, the strain–displacement relations can be ob-tained as
ε = − ∂∂ ( )z
wx
, 6xx
2
2
ε = − ∂∂ ( )
zw
y,
7yy
2
2
ε = ( )0, 8zz

Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–39 33
γ = − ∂∂ ( )
zw
xy2 ,
9xy
2
γ γ= = ( )0. 10xz yz
The strain energy can be expressed as
∫ σ ε Ω= ⇀ ⋅⇀ ( )ΩU d
12
, 11strainT
where σ σ σ σ⇀ = [ ],xx yy xyT
, , ε ε ε ε⇀ = [ ],xx yy xyT
, .
The energy absorbed in the medium is
∫ Ω= ⋅ ( )ΩU K w d
12
, 12medium w2
where Kw is the Winkler modulus.The work done by the axial compressive load can be expressed
as
∫ Ω= ⇀( )Ω
⎡⎣⎢
⎤⎦⎥U p
ww d ,
13p
xx
yy
,
,
where ⇀ = [ ( ) ( )]p p x p y, T .Therefore, the total potential energy of such a system is
Π = + − ( )U U U , , 14strain medium p
where Ustrain is the strain energy of the SLGS, Umedium is the potentialenergy of the medium and Up is the work done by the externalforce.
Using the principle of total potential energy, when the firstvariation of the total potential energy is set at zero, the equili-brium equation can be obtained as
+ + − + ( ) + ( ) = ( )M M M K w p x w p y w2 0, 15x xx xy xy y yy w xx yy, , , , ,
where { } ∫ σ σ σ= { }−
M M M zdz, , , , .x y xyT
h
hxx yy xy
T/2
/2
The most widely used form of non-local constitutive relation-ship is the differential constitutive equation. According to [15], thedifferential form obtained from the integrated form is
σ ε( − ( ) ∇ ) = ( )e a C1 : , 16ij ijkl kl02 2
where ( )e a02 denotes the non-local parameter, which accounts for
the increasingly important long range forces between atoms andthe noncontinuity of nanostructures, thus revealing the small-scale effect on the response of nanoscale structures. σij is the non-local stress, e0 is the non-local material constant ranging from 0 to14 [38] and a is internal characteristic lengths (such as lengths ofC–C bonds and the lattice parameter). Cijkl and εkl are the localstiffness tensor and traditional strain, respectively. The non-localtheory reduces to local theory when the non-local parameter goesto zero.
The stress–strain relationship of the non-local plate can bedescribed as
σσσ
σσσ
εεε
− ( ) ∇ =( − ) ( − )( − ) ( − )
( )
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎧⎨⎩
⎫⎬⎭
⎧⎨⎩
⎫⎬⎭
⎡
⎣⎢⎢⎢
⎤
⎦⎥⎥⎥
⎡
⎣⎢⎢
⎤
⎦⎥⎥e a
E v vE v
vE v E v
G
/ 1 / 1 0
/ 1 / 1 00 0
,
17
xx
yy
xy
xx
yy
xy
xx
yy
xy0
2 2
2 2
2 2
where E , v and G denote the elastic modulus, Poisson's ratio andshear modulus, respectively. Thus, the non-local moments can beexpressed as
− ( ) ∇ = − ∂∂
+ ∂∂ ( )
⎛⎝⎜
⎞⎠⎟M e a M D
wx
vw
y,
18x x0
2 22
2
2
2
− ( ) ∇ = − ∂∂
+ ∂∂ ( )
⎛⎝⎜
⎞⎠⎟M e a M D
wy
vwx
,19
y y02 2
2
2
2
2
− ( ) ∇ = − ( − ) ∂∂ ∂ ( )
M e a M D vw
x y1 .
20xy x0
2 22
Substituting Eqs. (18)–(20) into Eq. (15), the following govern-ing equation for the buckling problem can be obtained
− ∇ = − ( ) ∇ − ( ) − ( ) ( )⎡⎣ ⎤⎦⎡⎣ ⎤⎦D w e a K w p x w p y w1 , 21w xx yy4
02 2
, ,
where = ( − )D Eh v/12 13 2 is the bending rigidity of the platewhile ( )p x and ( )p y are axial compressive loads along the lengthdirection (X axis) and width direction (Y axis), respectively.
3. Numerical implementation
3.1. Weak form of equilibrium equation
To reduce the differentiability of the shape function used in theelement-free method, the original strong form equilibrium equa-tion is multiplied by the virtual displacement δw, thus obtainingthe following equation
{ }∫ δ ∇ + − ( ) ∇ − ( ) − ( )
= ( )Ω
⎡⎣ ⎤⎦⎡⎣ ⎤⎦w D w e a K w p x w p y w
dxdy
1
0. 22
w xx yy4
02 2
, ,
The above equation can then be integrated by part as
∫∫ ∫∫ ∫
∫∫
∫
∫∫ ∫
∫
∫
δ δ δ
δ δ δ
δ δ
δ δ
δ δ
δ δ δ
δ δ δ
δ δ
δ δ
δ δ
δ δ
δ δ
δ δ
( + + )
+ + ( ) ( + )
+ ( ) + ( )
+ ( ) ( ) ( + )
+ ( ) ( ) ( + )
+ ( − +
− + − )
− ( ) ( + )
− ( ) − ( )
+ ( ) ( ) ( −
+ − )
+ ( ) ( ) ( −
+ − ) ( )
Ω
Ω Ω
Ω Ω
Ω
Ω
Γ
Γ
Γ Γ
Γ
Γ
D w w w w w w dxdy
K wwdxdy e a K w w w w dxdy
p x w w dxdy p y w w dxdy
e a p x w w w w dxdy
e a p y w w w w dxdy
D ww n w w n ww n
w w n ww n w w n ds
e a K ww n ww n ds
p x ww n ds p y ww n ds
e a p x ww n w w n
ww n w w n ds
e a p y ww n w w n
ww n w w n ds
2
2
2
. 23
xx xx xy xy yy yy
w w x x y y
x x y y
xx xx xy xy
yy yy xy xy
xxx x x xx x xyy x
x xy y yyy y y yy y
w x x y y
x x y y
xxx x x xx x
xyy x x xy y
yyy y y yy y
xyy x x xy y
, , , , , ,
02
, , , ,
, , , ,
02
, , , ,
02
, , , ,
, , , ,
, , , , ,
02
, ,
, ,
02
, , ,
, , ,
02
, , ,
, , ,
3.2. Kernel particle shape functions
Following the detailed description of the theoretical formula-tion of the reproducing kernel particle method (RKPM) by Liu et al.[39] and Chen et al. [40], for a domain discretized by a set of nodesxI , I¼1… NP, displacement approximations can be expressed as
∑ ψ= ( )( )=
xu u ,24
h
I
NP
I I1
where ψ ( )xI and uI denote the shape function and nodal parameterassociated with node I , respectively.
With the kernel function Φ ( − )x xa I and the correction func-tion ( − )x x xC ; I , the shape function is expressed as
ψ Φ( ) = ( − ) ( − ) ( )x x x x x xC ; . 25I I a I

Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–3934
The shape function must satisfy the reproduction conditions
∑ ψ ( ) = + =( )=
x x y x y p qfor 0, 1, 2.26I
NP
I Ip
Iq p q
1
The correction function is expressed by a linear combination ofpolynomial basis functions
( − ) = ( − ) ( ) ( )x x x x x xC H b; , 27IT
I
( ) = [ ( ) ( ) ( ) ( ) ( ) ( )] ( )x b x y b x y b x y b x y b x y b x yb , , , , , , , , , , , , 280 1 2 3 4 5T
( )( − ) = [ − − ( − )( − ) ( − ) ( − ) ] 29x x x x y y x x y y x x y yH 1, , , , , ,I I I I I I IT 2 2
where H is a vector of the quadratic basis, ( )xb is a coefficientfunction of x and y is to be determined. Therefore, the shapefunction can be expressed as
ψ Φ( ) = ( ) ( − ) ( − ) ( )x x x x x xb H . 30I I a IT
Substituting Eq. (30) into Eq. (26), we can obtain coefficient( )xb as
( ) = ( ) ( ) ( )−x xb M H 0 , 311
where
∑ Φ( ) = ( − ) ( − ) ( − )( )=
x x x x x x xM H H ,32I
NP
I I a I1
T
( ) = [ ] ( )H 0 1, 0, 0, 0, 0, 0, . 33T
For this 2-D SLGS problem, kernel function Φ ( − )x xa I is definedas
Φ Φ Φ( − ) = ( )⋅ ( ) ( )x x x y , 34a I a a
in which
Φ φ( ) = −( )
⎜ ⎟⎛⎝
⎞⎠x
x xa
,35a
I
where φ ( )x is the weight function. The cubic spline function ischosen as the weight function, given by
φ ( ) =
− + ≤ ≤
− + − < ≤
( )
⎧
⎨⎪⎪
⎩⎪⎪
⎫
⎬⎪⎪
⎭⎪⎪
z
z z z
z z z z
23
4 4 for 012
43
4 443
for12
1
0 otherwise
,
36
z I
I I I
I I I I
2 3
2 3
where = −zIx x
dI
Iand dI is the size of the support of node I, calcu-
lated by
= ( )d d c , 37I Imax
where dmax is a scaling factor ranging from 2.0 to 4.0 and cI is thedistance between nodes. dmax should be chosen properly to avoidthe singularity of matrix M by searching for an adequate amountof nodes.
Finally, the shape function can be written as
ψ Φ( ) = ( ) ( ) ( − ) ( − ) ( )−x x x x x xH 0 M H . 38I I a IT 1
3.3. Discrete system equations
For an SLGS discretized by a set of nodes xI , I¼1… NP, ap-proximations of the displacements are expressed as
∑ ψ=( )=
w w .39
h
I
NP
I I01
Letting λ = ( ) = ( )p x p y , the discrete equation is obtained by
substituting Eq. (39) into Eq. (23)
λ( − ) = ( )K K W 0, 40p
where
= + ( )K K K , 41SLGS medium
∫ Ω= ( )ΩK B S B d , 42SLGS
IJLI
TL LJ
∫ Ω= ( )ΩK B S B d , 43medium
IJKI
TK KJ
∫ Ω= ( )ΩK B S B d , 44p
IJpI
Tp pJ
=( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥S
DD
D
0 00 2 00 0
,45
L
= ( )( ) ( )
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
S
K
e a K
e a K
0 0
0 0
0 0
,
46
K
w
w
w
02
02
( )
=
− ( )− ( ) ( )
− ( ) [ ( )
+ ( )]− ( )
− ( ) ( )
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥⎥ 47
S
p x
e a p x
e a p x
p y
p y
e a p y
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
,p
02
02
02
ψψψ
ψψψ
ψψψψψ
= = =
( )
⎡
⎣⎢⎢⎢
⎤
⎦⎥⎥⎥
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
B B B, , .
48
L
I xx
I xy
I yy
K
I
I x
I y
p
I x
I xx
I xy
I y
I yy
,
,
,
,
,
,
,
,
,
,
4. Results and discussion
4.1. Convergence study and validation
The convergence test is performed using classical plate theoryon a square SLGS with a four edged simply-supported boundarycondition, ignoring elastic foundations. The non-local and me-chanical parameters are taken from Ansari [41]: ( ) =e a 1.85 nm0
2 2,the Young's modulus E¼1 TPa, the Poisson's ratio =v 0.16 and thethickness =h 0.34 nm.
Based on the above parameters, a convergence test is carriedout to determine the minimum amount of nodes required to ob-tain accurate and stable results. It should be noted that the scalingparameter is set at 2.3. Fig. 2 shows that a setup of 19�19 nodes isappropriate for the next computation.
Subsequently, a comparison simulation is performed on anarmchair SLGS to validate the whole procedure. Rouhi [24] claimedthat the critical buckling force of the armchair SLGS is higher thanthat of the zigzag SLGS. However, the buckling force of the arm-chair SLGS is roughly the same as that of the zigzag SLGS, withonly small variations. Therefore, the influence of charity is ne-glected in the present work.
According to [36], the mechanical parameters of the SLGS aretaken as: Young's modulus E¼1.06 TPa, Poisson's ratio =v 0.25and thickness =h 0.34 nm. Fig. 3 illustrates the comparison ofsimulation results on a 15 nmwide square armchair SLGS with [6],which uses the same mechanical parameters as used in [36]. Thecritical load ratio is defined as
=
Critical buckling load ratiocritical buckling load from non local theory
critical buckling load from local theory.
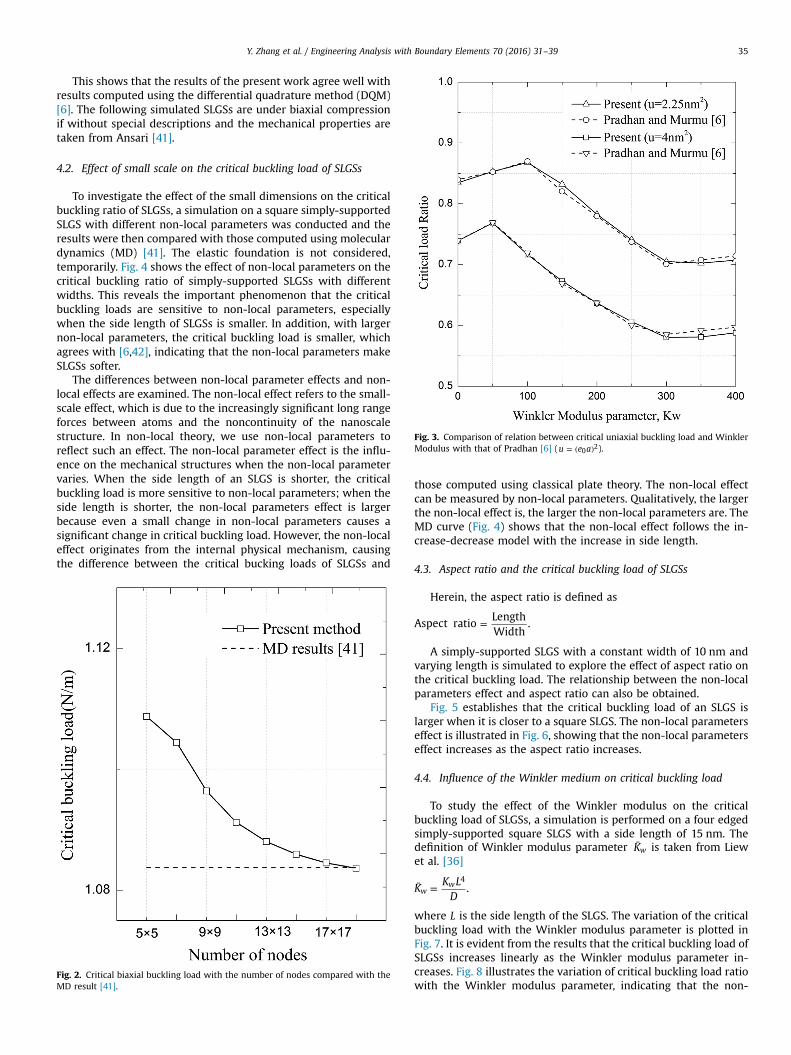
Fig. 3. Comparison of relation between critical uniaxial buckling load and WinklerModulus with that of Pradhan [6] ( = ( )u e a0
2).
Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–39 35
This shows that the results of the present work agree well withresults computed using the differential quadrature method (DQM)[6]. The following simulated SLGSs are under biaxial compressionif without special descriptions and the mechanical properties aretaken from Ansari [41].
4.2. Effect of small scale on the critical buckling load of SLGSs
To investigate the effect of the small dimensions on the criticalbuckling ratio of SLGSs, a simulation on a square simply-supportedSLGS with different non-local parameters was conducted and theresults were then compared with those computed using moleculardynamics (MD) [41]. The elastic foundation is not considered,temporarily. Fig. 4 shows the effect of non-local parameters on thecritical buckling ratio of simply-supported SLGSs with differentwidths. This reveals the important phenomenon that the criticalbuckling loads are sensitive to non-local parameters, especiallywhen the side length of SLGSs is smaller. In addition, with largernon-local parameters, the critical buckling load is smaller, whichagrees with [6,42], indicating that the non-local parameters makeSLGSs softer.
The differences between non-local parameter effects and non-local effects are examined. The non-local effect refers to the small-scale effect, which is due to the increasingly significant long rangeforces between atoms and the noncontinuity of the nanoscalestructure. In non-local theory, we use non-local parameters toreflect such an effect. The non-local parameter effect is the influ-ence on the mechanical structures when the non-local parametervaries. When the side length of an SLGS is shorter, the criticalbuckling load is more sensitive to non-local parameters; when theside length is shorter, the non-local parameters effect is largerbecause even a small change in non-local parameters causes asignificant change in critical buckling load. However, the non-localeffect originates from the internal physical mechanism, causingthe difference between the critical bucking loads of SLGSs and
Fig. 2. Critical biaxial buckling load with the number of nodes compared with theMD result [41].
those computed using classical plate theory. The non-local effectcan be measured by non-local parameters. Qualitatively, the largerthe non-local effect is, the larger the non-local parameters are. TheMD curve (Fig. 4) shows that the non-local effect follows the in-crease-decrease model with the increase in side length.
4.3. Aspect ratio and the critical buckling load of SLGSs
Herein, the aspect ratio is defined as
=Aspect ratioLengthWidth
.
A simply-supported SLGS with a constant width of 10 nm andvarying length is simulated to explore the effect of aspect ratio onthe critical buckling load. The relationship between the non-localparameters effect and aspect ratio can also be obtained.
Fig. 5 establishes that the critical buckling load of an SLGS islarger when it is closer to a square SLGS. The non-local parameterseffect is illustrated in Fig. 6, showing that the non-local parameterseffect increases as the aspect ratio increases.
4.4. Influence of the Winkler medium on critical buckling load
To study the effect of the Winkler modulus on the criticalbuckling load of SLGSs, a simulation is performed on a four edgedsimply-supported square SLGS with a side length of 15 nm. Thedefinition of Winkler modulus parameter K̄w is taken from Liewet al. [36]
¯ =KK L
D.w
w4
where L is the side length of the SLGS. The variation of the criticalbuckling load with the Winkler modulus parameter is plotted inFig. 7. It is evident from the results that the critical buckling load ofSLGSs increases linearly as the Winkler modulus parameter in-creases. Fig. 8 illustrates the variation of critical buckling load ratiowith the Winkler modulus parameter, indicating that the non-

Fig. 4. Effect of nonlocal parameter on the critical buckling ratio of simply-sup-ported SLGSs with different width ( = ( )u e a0
2). Fig. 5. Effect of aspect ratio on critical buckling load of SLGS for different nonlocalparameters ( = ( )u e a0
2).
Fig. 6. Nonlocal effects on critical buckling load of SLGS for different aspect ratio( = ( )u e a0
2).
Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–3936
local parameters effect decreases as the Winkler modulus para-meter increases. Another study of a four sided simply-supportedSLGS under uniaxial compression is carried out to investigate theeffect of load type on critical buckling load. Fig. 9 displays thevariation of the critical buckling load of the SLGS under uniaxialcompression with the Winkler modulus. It can be seen that thecritical buckling load is larger when the SLGS is under uniaxialcompression than under biaxial compression. Moreover, the trendof the non-local parameters effect with increasing Winkler mod-ulus parameter is also different from that when the SLGS is underbiaxial compression. (Fig. 10)
4.5. Effect of the Winkler medium and non-local parameters on thecritical buckling patterns
The first eight buckling patterns of a four edged simply-sup-ported square SLGS with a side length of 15 nm are shown inFig. 11. Herein the value of non-local parameters is zero while thevalue of the Winkler modulus is 400, which can be described usingcombination parameters as (0, 400). When the combinationparameters are (0, 1200) or (4, 400), the eight buckling modes areas plotted in Fig. 12.
The critical buckling pattern of an SLGS embedded in an elasticmedium is the stable form of an SLGS when it buckles from its flatshape, suffering little disturbance under minimum compression.This is the most likely to occur buckling form because externalenergy absorbed by the SLGS and the elastic foundation is at itslowest. As the Winkler parameter increases, energy absorbed intothe elastic foundation is relatively increased and that absorbedinto the SLGS is relatively decreased. When the Winkler parameteris large enough, the influence of the elastic foundation on thecritical buckling mode becomes dominant, thus contributing toformation of the distinct critical buckling patterns of SLGSs whichare quite different to those of SLGSs without elastic foundations.
Comparing the critical buckling patterns of SLGSs under combi-nation parameter (0, 400) with those of SLGSs under combination(0, 1200) and (4, 400), it is found that the Winkler modulus
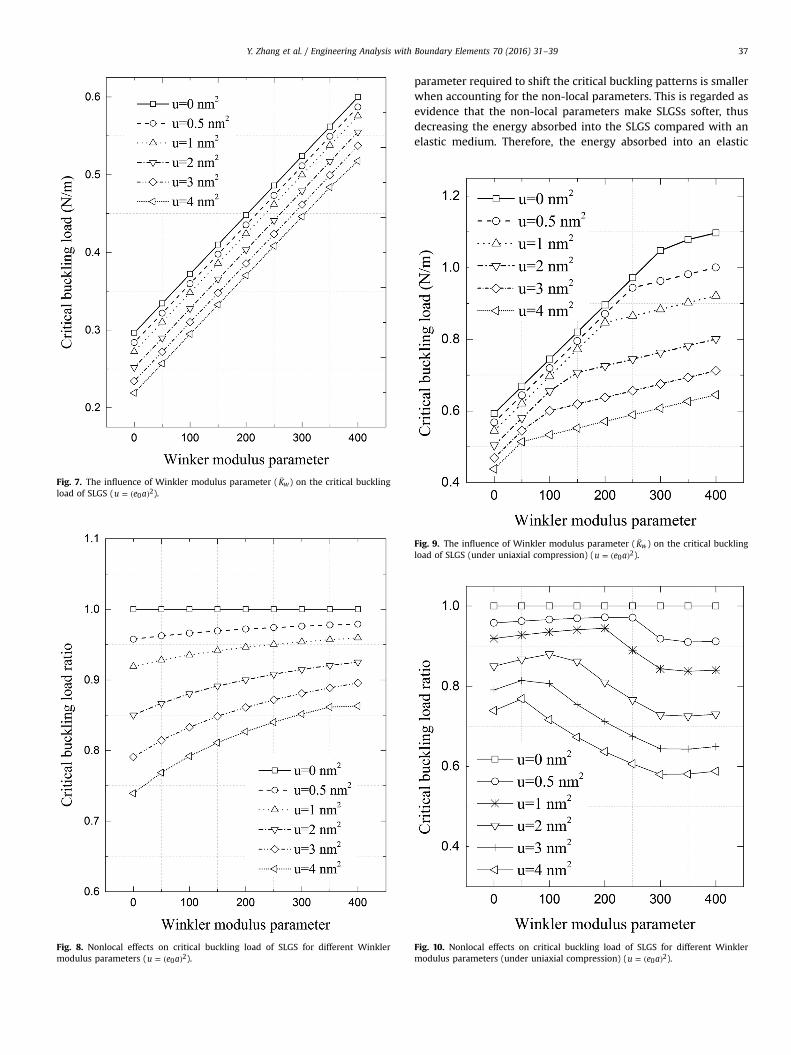
Fig. 7. The influence of Winkler modulus parameter ( K̄w) on the critical bucklingload of SLGS ( = ( )u e a0
2).
Fig. 8. Nonlocal effects on critical buckling load of SLGS for different Winklermodulus parameters ( = ( )u e a0
2).
Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–39 37
parameter required to shift the critical buckling patterns is smallerwhen accounting for the non-local parameters. This is regarded asevidence that the non-local parameters make SLGSs softer, thusdecreasing the energy absorbed into the SLGS compared with anelastic medium. Therefore, the energy absorbed into an elastic
Fig. 9. The influence of Winkler modulus parameter ( K̄w) on the critical bucklingload of SLGS (under uniaxial compression) ( = ( )u e a0
2).
Fig. 10. Nonlocal effects on critical buckling load of SLGS for different Winklermodulus parameters (under uniaxial compression) ( = ( )u e a0
2).
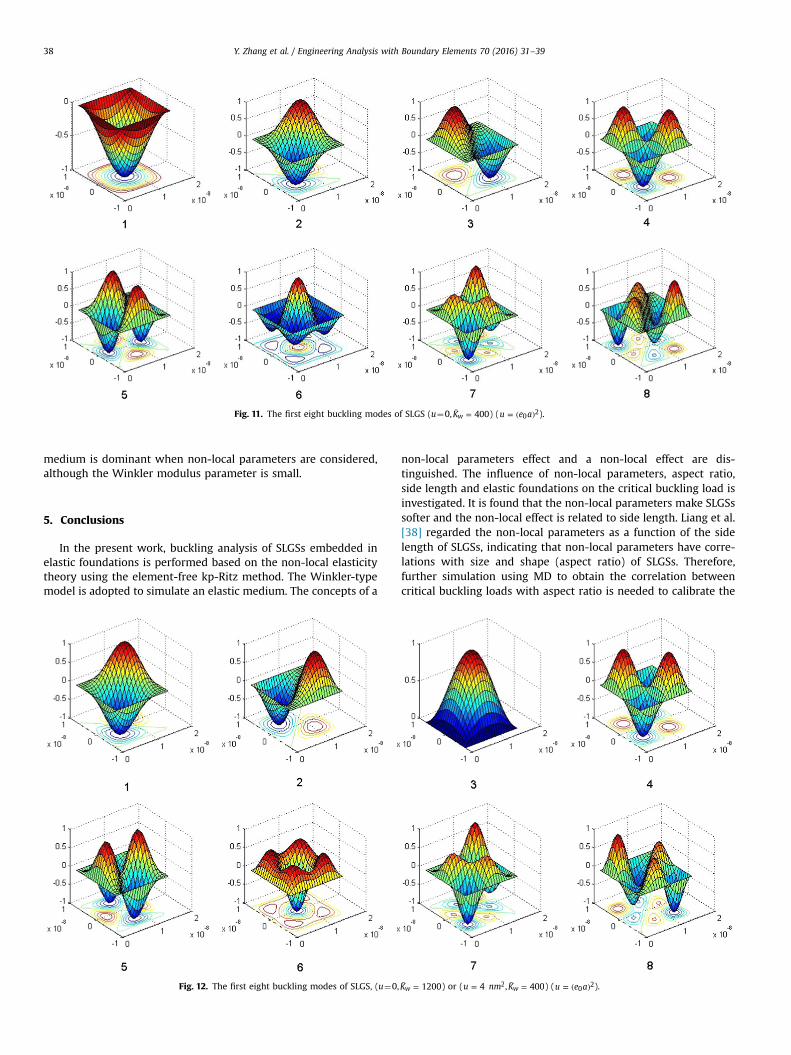
Fig. 11. The first eight buckling modes of SLGS (u¼0, ¯ =K 400w ) ( = ( )u e a02).
Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–3938
medium is dominant when non-local parameters are considered,although the Winkler modulus parameter is small.
5. Conclusions
In the present work, buckling analysis of SLGSs embedded inelastic foundations is performed based on the non-local elasticitytheory using the element-free kp-Ritz method. The Winkler-typemodel is adopted to simulate an elastic medium. The concepts of a
Fig. 12. The first eight buckling modes of SLGS, (u¼0,
non-local parameters effect and a non-local effect are dis-tinguished. The influence of non-local parameters, aspect ratio,side length and elastic foundations on the critical buckling load isinvestigated. It is found that the non-local parameters make SLGSssofter and the non-local effect is related to side length. Liang et al.[38] regarded the non-local parameters as a function of the sidelength of SLGSs, indicating that non-local parameters have corre-lations with size and shape (aspect ratio) of SLGSs. Therefore,further simulation using MD to obtain the correlation betweencritical buckling loads with aspect ratio is needed to calibrate the
¯ =K 1200w ) or ( =u nm4 2, ¯ =K 400w ) ( = ( )u e a02).

Y. Zhang et al. / Engineering Analysis with Boundary Elements 70 (2016) 31–39 39
variation of non-local effects with aspect ratio. Additionally, theinfluence of boundary conditions on non-local effects should alsobe investigated. Further it is also concluded that both non-localparameters and elastic medium have influence on the criticalbuckling patterns of SLGSs. It is evident that the critical bucklingpattern is dominated by the proportion of energy absorbed by theSLGS and the elastic foundation.
Acknowledgements
The work described in this paper was fully supported by grantsfrom the Research Grants Council of the Hong Kong Special Ad-ministrative Region, China (Project no. 9041674, CityU118411) andthe National Natural Science Foundation of China (Grant nos.11402142 and 51378448).
References
[1] Arash B, Wang Q. A review on the application of nonlocal elastic models inmodeling of carbon nanotubes and graphenes. Comput Mater Sci 2012;51(1):303–13.
[2] Tsiamaki AS, Georgantzinos SK, Anifantis NK. Monolayer graphene resonatorsfor mass detection: a structural mechanics feasibility study. Sens Actuators A:Phys 2014;217(0):29–38.
[3] Kheirabadi N, Shafiekhani A, Fathipour M. Review on graphene spintronic,new land for discovery. Superlattices Microstruct 2014;74(0):123–45.
[4] Wang J, Lin Z, Chan KS. Pure valley current generation in graphene with aDirac gap by quantum pumping. Appl Phys Express 2014;7:12.
[5] Novoselov KS, Geim AK, Morozov SV, Jiang D, Zhang Y, Dubonos SV, et al.Electric field effect in atomically thin carbon films. Science 2004;306(5696):666–9.
[6] Pradhan SC, Murmu T. Small scale effect on the buckling analysis of single-layered graphene sheet embedded in an elastic medium based on nonlocalplate theory. Physica E: Low-dimens Syst Nanostruct 2010;42(5):1293–301.
[7] Ghorbanpour Arani A, Kolahchi R, Vossough H. Buckling analysis and smartcontrol of SLGS using elastically coupled PVDF nanoplate based on the non-local Mindlin plate theory. Physica B: Condens Matter 2012;407(22):4458–65.
[8] Anjomshoa A., Shahidi A.R., Hassani B., Jomehzadeh E. Finite element bucklinganalysis of multi-layered graphene sheets on elastic substrate based on non-local elasticity theory. Applied Mathematical Modelling (0).
[9] Hu K., Kulkarni D.D., Choi I., Tsukruk V.V. Graphene-polymer nanocompositesfor structural and functional applications. Progress in Polymer Science (0).
[10] Qiu F, Hao Y, Li X, Wang B, Wang M. Functionalized graphene sheets filledisotactic polypropylene nanocomposites. Compos Part B: Eng 2015;71(0):175–83.
[11] Yakobson BI, Brabec CJ, Bernholc J. Nanomechanics of carbon tubes: in-stabilities beyond linear response. Phys Rev Lett 1996;76(14):2511–4.
[12] Krishnan A, Dujardin E, Ebbesen TW, Yianilos PN, Treacy MMJ. Young'smodulus of single-walled nanotubes. Phys Rev B 1998;58(20):14013–9.
[13] Li YS, Pan E. Static bending and free vibration of a functionally graded pie-zoelectric microplate based on the modified couple-stress theory. Int J Eng Sci2015;97:40–59.
[14] Eringen AC. Nonlocal polar field models.Berlin: Springer; 1976.[15] Eringen AC. On differential equations of nonlocal elasticity and solutions of
screw dislocation and surface waves. J Appl Phys 1983;54(9):4703–10.[16] Peddieson J, Buchanan GR, McNitt RP. Application of nonlocal continuum
models to nanotechnology. Int J Eng Sci 2003;41(3–5):305–12.[17] Shen HS. Nonlocal shear deformable shell model for bending buckling of mi-
crotubules embedded in an elastic medium. Phys Lett A 2010;374(39):4030–9.[18] Wang Q, Zhou GY, Lin KC. Scale effect on wave propagation of double-walled
carbon nanotubes. Int J Solids Struct 2006;43(20):6071–84.[19] Arash B, Ansari R. Evaluation of nonlocal parameter in the vibrations of single-
walled carbon nanotubes with initial strain. Phys E: Low-dimens Syst Na-nostruct 2010;42(8):2058–64.
[20] Wang Q, Liew KM. Application of nonlocal continuum mechanics to staticanalysis of micro- and nano-structures. Phys Letters A 2007;363(3):236–42.
[21] Narendar S, Gopalakrishnan S. Nonlocal continuum mechanics based ultra-sonic flexural wave dispersion characteristics of a monolayer graphene em-bedded in polymer matrix. Compos Part B: Eng 2012;43(8):3096–103.
[22] Zhang W, Wang X. Elastoplastic buckling analysis of thick rectangular platesby using the differential quadrature method. Comput Math Appl 2011;61(1):44–61.
[23] Huang Y, Luo QZ. A simple method to determine the critical buckling loads foraxially inhomogeneous beams with elastic restraint. Comput Math Appl2011;61(9):2510–7.
[24] Rouhi S, Ansari R. Atomistic finite element model for axial buckling and vi-bration analysis of single-layered graphene sheets. Physica E: Low-dimensSyst Nanostruct 2012;44(4):764–72.
[25] Mohammadi M, Ghayour M, Farajpour A. Free transverse vibration analysis ofcircular and annular graphene sheets with various boundary conditions usingthe nonlocal continuum plate model. Compos Part B: Eng 2013;45(1):32–42.
[26] Karamooz Ravari MR, Talebi S, Shahidi AR. Analysis of the buckling of rec-tangular nanoplates by use of finite-difference method. Meccanica 2014;49(6):1443–55.
[27] Pradhan SC, Reddy GK. Buckling analysis of single walled carbon nanotube onWinkler foundation using nonlocal elasticity theory and DTM. Comput MaterSci 2011;50(3):1052–6.
[28] Sarrami-Foroushani S, Azhari M. Nonlocal vibration and buckling analysis ofsingle and multi-layered graphene sheets using finite strip method includingvan der Waals effects. Physica E: Low-dimens Syst Nanostruct 2014;57(0):83–95.
[29] Zhang LW, Lei ZX, Liew KM, Yu JL. Large deflection geometrically nonlinearanalysis of carbon nanotube-reinforced functionally graded cylindrical panels.Comput Methods Appl Mech Eng 2014;273(0):1–18.
[30] Zhang LW, Deng YJ, Liew KM. An improved element-free Galerkin method fornumerical modeling of the biological population problems. Eng Anal BoundaryElements 2014;40(0):181–8.
[31] Yan JW, Zhang LW, Liew KM, He LH. A higher-order gradient theory formodeling of the vibration behavior of single-wall carbon nanocones. ApplMath Model 2014;38(11–12):2946–60.
[32] Liew KM, Lei ZX, Yu JL, Zhang LW. Postbuckling of carbon nanotube-reinforcedfunctionally graded cylindrical panels under axial compression using ameshless approach. Comput Methods Appl Mech Eng 2014;268(0):1–17.
[33] Lei ZX, Liew KM, Yu JL. Free vibration analysis of functionally graded carbonnanotube-reinforced composite plates using the element-free kp-Ritz methodin thermal environment. Compos Struct 2013;106:128–38.
[34] Yan JW, Liew KM, He LH. Buckling and post-buckling of single-wall carbonnanocones upon bending. Compos Struct 2013;106:793–8.
[35] Pasternak PL. On a new method of analysis of an elastic foundation by meansof two foundation constants. in Russian. Gos Izd Lip po Strait i Arkh 1954.
[36] Liew KM, He XQ, Kitipornchai S. Predicting nanovibration of multi-layeredgraphene sheets embedded in an elastic matrix. Acta Mater 2006;54(16):4229–36.
[37] Winkler E. Theory of Elasticity and Strength. Dominicus,Prague 1867.[38] Liang Y, Han Q. Prediction of the nonlocal scaling parameter for graphene
sheet. Eur J Mech – A/Solids 2014;45(0):153–60.[39] Liu WK, Jun S, Zhang YF. Reproducing kernel particle methods. Int J Numer
Methods Fluids 1995;20(8-9):1081–106.[40] Chen JS, Pan C, Wu CT, Liu WK. Reproducing Kernel Particle Methods for large
deformation analysis of non-linear structures. Comput Methods Appl MechEng 1996;139(1-4):195–227.
[41] Ansari R, Rouhi H. Explicit analytical expressions for the critical bucklingstresses in a monolayer graphene sheet based on nonlocal elasticity. SolidState Commun 2012;152(2):56–9.
[42] Murmu T, Pradhan SC. Buckling analysis of a single-walled carbon nanotubeembedded in an elastic medium based on nonlocal elasticity and Timoshenkobeam theory and using DQM. Physica E: Low-dimens Syst Nanostruct 2009;41(7):1232–9.