Embed Size (px)
Citation preview

ENERGY-SPEED-ACCURACY TRADEOFFS IN A DRIVEN,
STOCHASTIC, ROTARY MACHINE
by
Alexandra Kathleen Kasper
B.Sc., McMaster University, 2015
THESIS SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
IN THE DEPARTMENT
OF
PHYSICS
FACULTY OF SCIENCE
c© Alexandra Kathleen Kasper 2017
SIMON FRASER UNIVERSITY
Summer 2017
All rights reserved. However, in accordance with the Copyright Act of Canada,this work may be reproduced, without authorization, under the conditions forFair Dealing. Therefore, limited reproduction of this work for the purposes ofprivate study, research, criticism, review, and news reporting is likely to be
in accordance with the law, particularly if cited appropriately.

ii
Approval
Name: Alexandra Kathleen Kasper Degree: Master of Science (Physics) Title: Energy Speed Accuracy Tradeoffs in a Driven,
Stochastic, Rotary Machine Examining Committee: Chair: Malcolm Kennett
Associate Professor
David Sivak Senior Supervisor Assistant Professor
John Bechhoefer Supervisor Professor
Nancy Forde Internal Examiner Associate Professor
Date Defended:
August 3, 2017

Abstract
Molecular machines are stochastic systems capable of converting between different forms
of energy such as chemical potential energy and mechanical work. The F1 subunit of ATP
synthase couples the rotation of its central crankshaft with the synthesis or hydrolysis of
ATP. This machine can reach maximal speeds of hundreds of rotations per second, and is
believed to be capable of nearly 100% efficiency in near-equilibrium conditions, although a
biased cycling machine is a nonequilibrium system and therefore must waste some energy
in the form of dissipation. We explore the fundamental relationships among the accuracy,
speed, and dissipated energy of such driven rotary molecular machines, in a simple model
of F1. Simulations using Fokker-Planck dynamics are used to explore the parameter space
of driving strength, internal energetics of the system, and rotation rate. A tradeoff between
accuracy and work as speed increases is found to occur over the range of biologically rele-
vant timescales. We search for a way to improve this tradeoff by applying approximations
of dissipation minimizing protocols and find a reduction in both work and accuracy, yet
accuracy drops less than the work does, leading to an overall decrease in the ratio of work
to accuracy.
Keywords: Molecular machines; Fokker-Planck dynamics; Nonequilibrium tradeoffs
iii

Acknowledgements
I would like to thank David Sivak for allowing me to truly experience the process of re-
search. I fell down a few rabbit holes along the way but your calm confidence that I would
pull it together kept me going. You have helped me hone my physics intuition and reaf-
firmed my passion for aesthetics in academic figures.
I would also like to thank all the members of the Sivak group for their patience during
the months of Berry curvature and valuable discussions during group meetings. I would
especially like to thank Steve Large and Aidan Brown for pointing me in the right direction
and agreeing there is no obvious solution to my problems. The biophysics community at
SFU is also deserving of my thanks - you create such a supportive atmosphere inclusive of
students and faculty.
I acknowledge the financial support of Simon Fraser University through the C.D. Nel-
son Multi-Year Fellowship and the Natural Sciences and Engineering Research Council of
Canada through the Canada Graduate Scholarship.
My family has provided me with unconditional support since I began my academic jour-
ney after high school. My mother sparked my curiosity during my first science experiments
as a toddler and has continued to support me in my pursuit of physics, even though it isn’t
chemistry. My grandparents have continued to inspire me with their passion for learning
and close following of the theoretical physics community - I am certain they know more
about string theory than I do. My brother inspires me with his patience and persistence and
reminds me of the importance of family and friends.
Finally, I want to acknowledge the phenomenal support of Chapin Korosec. I truly
could not have asked for a better study buddy and life partner.
iv

Dedication
To my grandparents and life-long learners, Alan and Brenda Holvey, for reminding me to
never forget the physics.
v

Contents
Abstract iii
Acknowledgements iv
Dedication v
Contents vi
List of Figures ix
1 Introduction 11.1 Molecular Machines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Thermal Fluctuations . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Reynolds Number of Molecular Machines . . . . . . . . . . . . . . 4
1.2 FoF1 ATP Synthase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Structure and Function . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.2 Mechanochemical Coupling and Efficiency . . . . . . . . . . . . . 7
1.3 Energy-Speed-Accuracy Tradeoffs . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Motivations and Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Theoretical Framework 102.1 Nonequilibrium Thermodynamics . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Example: The Three-State Cycle . . . . . . . . . . . . . . . . . . . 11
2.1.2 Work, Heat, and Driving . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Driving of Cycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
vi

CONTENTS vii
2.2.1 Work Accumulation . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Example: Quadratic Trap . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.3 Work-Speed-Accuracy Tradeoffs . . . . . . . . . . . . . . . . . . . 18
2.3 Optimal Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3.1 Friction and Minimum-Dissipation Driving Protocols . . . . . . . . 20
2.3.2 Ratio of Naive and Optimal Excess Work . . . . . . . . . . . . . . 23
3 Model System 243.1 Goals of the Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 System Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1 Work and Heat . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 System Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.1 Continuity Equation . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 Periodic Steady State and Rotational Symmetry . . . . . . . . . . . . . . . 31
4 Methods 324.1 Numerical Fokker-Planck Dynamics . . . . . . . . . . . . . . . . . . . . . 32
4.1.1 Flux Calculation and Accuracy . . . . . . . . . . . . . . . . . . . . 33
4.1.2 Periodic Steady State . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.3 Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Energy and Time Scales . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.1 Setting the Time Scale . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2.2 Energy Scales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3 Friction Calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4 Optimal Protocol Calculation . . . . . . . . . . . . . . . . . . . . . . . . . 39
5 Results 415.1 Naive Driving Protocols . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.1.1 Accuracy and Work vs. Speed . . . . . . . . . . . . . . . . . . . . 43
5.1.2 Accuracy and Work . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.2 Friction and Minimum-Dissipation Driving Protocols . . . . . . . . . . . . 50
5.3 Minimum-Dissipation vs. Naive Driving Protocols . . . . . . . . . . . . . 57

CONTENTS viii
5.4 Parameter Ranges: Discussion and Limitations . . . . . . . . . . . . . . . 59
6 Conclusions 606.1 Significance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.1.1 ATP Synthase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.1.2 Artificial Machines . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2.1 Extending the Model . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2.2 Adaptive Time Step Friction Calculation . . . . . . . . . . . . . . 63
6.2.3 Higher-Order Corrections to Minimum-Dissipation Protocol . . . . 63
6.2.4 Experimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Bibliography 65
Appendices 71
A Quadratic Approximations 72

List of Figures
1.1 ATP Synthase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 Three State Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 Energy Landscape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1 Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Friction Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.1 Probability Distributions . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Naive Accuracy and Work versus Speed . . . . . . . . . . . . . . . . . . . 44
5.3 Naive Work and Accuracy Ratio, A=0 . . . . . . . . . . . . . . . . . . . . 45
5.4 Naive Accuracy and Work . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.5 Naive Flux and Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.6 Friction, Velocities, and Protocol . . . . . . . . . . . . . . . . . . . . . . . 51
5.7 Average Friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.8 Minimum-Dissipation Accuracy and Work versus Speed . . . . . . . . . . 54
5.9 Minimum-Dissipation Accuracy and Work . . . . . . . . . . . . . . . . . . 55
5.10 Minimum-Dissipation Flux and Power . . . . . . . . . . . . . . . . . . . . 56
5.11 Naive and Minimum-Dissipation Ratios . . . . . . . . . . . . . . . . . . . 58
ix

Chapter 1
Introduction
The second law of thermodynamics states that the universe evolves towards disorder. Yet
when we look at life on both the macroscopic and microscopic scale, we observe incredible
structure and seemingly directed and repeatable development. How can we address this
apparent paradox of physics demanding spontaneous disorder and biology demonstrating
an ability to evolve increasingly complex organisms over millions of years? In Chapter 2,
we will delve further into the limitations of the laws of thermodynamics, but here we will
briefly dissolve the present paradox by pointing out that the “law” of increasing disorder
applies to closed systems evolving towards equilibrium. That is to say, on average, the
universe as a whole becomes more disordered with time. However, the cell is not an isolated
system: chemicals and heat are exchanged with the surroundings, adding to the disorder of
the universe. Additionally, a living cell is not in equilibrium and in fact death, as famously
declared by Schrödinger, is to “decay into thermodynamical equilibrium” [1]. Furthermore,
thermodynamics deals with the average behaviour of a system, and in this case the second
law states that on average the entropy of the universe increases. Yet the energetics inside
the cell are sensitive to thermal fluctuations on the scale of 1 kBT =4.114 pN nm at room
temperature, and deviations from average do indeed occur. An individual process may
increase the organization of the cell, but at the cost of increasing disorder elsewhere and
consuming energy to do so. Life is essentially a continuous battle against disorder and the
soldiers are molecular machines: squishy, nanoscale proteins continuously bombarded by
thermal fluctuations and fueled by chemical energy.
Developing a model of a mechanochemically coupled molecular machine requires aban-
1

CHAPTER 1. INTRODUCTION 2
doning the intuition we have built from interacting with our macroscopic world. In the next
section, we will build an intuition about the intracellular environment and the physics gov-
erning the molecules responsible for keeping us away from the unfortunate state of thermal
equilibrium. More specifically, the level of noise in the form of thermal fluctuations pro-
duces large deviations from average behaviour. Furthermore, molecular machines operate
in the low-Reynolds regime, where inertia is negligible. Finally, understanding the en-
ergy scales of work and subsequent dissipated heat required to drive the cycle allows the
quantification of efficiency. By creating a basic model that is tested against the observed
behaviour of biological molecular machines, we can begin to play with the intrinsic ener-
getics of the system and search for optimal molecular designs and driving protocols. Our
model focuses on rotary machines and is inspired by F1; therefore, this chapter concludes
with an overview of ATP synthase.
1.1 Molecular Machines
Molecular machines are found in every form of life including eukaryotes such as plants and
animals but also prokaryotes: single-celled organisms that have no intracellular organelles
or even a nucleus. The variability between life forms is so great that molecular machines
are among the few common elements that appear to be crucial for sustaining life, such as
a cellular membrane and a genetic code in the form of DNA. Molecular machines are a
class of protein complexes capable of converting between two types of energy, for example
chemical potential and mechanical motion. Adenosine triphosphate (ATP) is their most
common source of chemical energy, releasing approximately 20 kBT of energy when a
phosphate bond is hydrolysed, producing adenosine diphosphate (ADP).
Molecular machines can be classified into two main groups: linear walkers and rotary
systems. Linear walkers such as the myosin, kinesin, and dynein families achieve proces-
sive motion by hydrolysing ATP to step along linear tracks within the cell [2]. Kinesin and
dynein walk along microtubules: long protein filaments that create a network within the
cytoplasm [3]. Kinesin is responsible for a variety of crucial tasks including facilitating
cellular division and transporting vesicles and organelles within the cell [4, 3, 5]. Dynein
is also capable of carrying cargo and is crucial to the mobility of hair-like structures called
cilia found on the surface of eukaryotic cells [6, 3]. Myosin interacts with actin, another

CHAPTER 1. INTRODUCTION 3
protein-based filament that together with the microtubule network forms the cytoskeleton
within cells [3]. Myosin and actin are central to the mechanism of muscle contraction [3].
The disruption of the function of linear walker motor proteins has been associated with
diseases such as cancer [4] and numerous other disorders [6].
While the geometry of linear walkers and rotary motors may distinguish their be-
haviour, the mechanism of mechanochemical coupling remains an elusive yet common
problem when trying to understand how they function. Mechanochemical coupling refers
to the energy transduction between chemical energy, often stored in the γ phosphoanhy-
dride bond of ATP, and mechanical work in the form of linear or rotary motion. The two
common examples of rotary machines are ATP synthase and flagella motors in bacteria.
Both of these systems are associated with a cellular or organellar membrane in order to
achieve rotation relative to a component tethered in the membrane. As the name suggests,
ATP synthase synthesizes ATP and is therefore crucial to the functioning of a cell, since
many processes ATP. For example, it is estimated that it DNA replication in E. coli costs
the equivalent of 3.5×108 ATP molecules [7]. Flagellar motors are found in bacteria and
generate the torque responsible for turning the flagellar filaments and propelling the cell.
Single molecule experiments can measure the time scales and forces that are relevant
to molecular machines. Molecular machines hydrolyse ATP at rates of tens to hundreds of
Hertz, or roughly 1 ATP per 10 ms [2, 8]. Furthermore, one type of kinesin has been shown
to be capable of processive walking up to a maximal load force (stall force) of 8 pN [5].
Additionally, ATP synthase has a stall torque of roughly 30 pN nm/rad [9]. Furthermore,
some of these machines are believed to be capable of nearly 100% efficiency, meaning
the liberated chemical energy is nearly perfectly converted into mechanical work or the
final chemical product [2, 10]. The motivation for developing a theoretical framework to
describe the operation of molecular machines should be apparent from their importance
to sustaining life, intrigue as an energy transducer, and inspiration for artificial nanoscale
machines.
1.1.1 Thermal Fluctuations
Thermal fluctuations refer to random deviations from the average system state, arising in
systems with non-zero temperature and quantified by kBT , where kB is Boltzmann’s con-

CHAPTER 1. INTRODUCTION 4
stant and T is the temperature of the surroundings. Fluctuations in the conformation or
position of molecules originate from stochastic collisions with the surrounding medium.
Biological systems like proteins in cells are surrounded by an aqueous environment com-
posed of water and the other intracellular molecules. For the purposes of modelling the
influence of the intracellular environment, it is often assumed to be homogeneous with
the mechanical properties of water. Thermal fluctuations are incorporated into models in
the form of Gaussian-distributed delta-correlated forces: at each instant in time the system
is subjected to a random force drawn from a Gaussian distribution with zero mean and a
standard deviation proportional to kBT . At higher temperatures, larger random forces are
increasingly likely. Thermal fluctuations are the underlying cause of Brownian motion and
molecular diffusion processes.
At room temperature, kBT =4.114 pN nm. This is comparable to the energetic barriers
between different conformational states of proteins and therefore thermal fluctuations result
in significant stochastic motion.
1.1.2 Reynolds Number of Molecular Machines
The Reynolds number captures the dominant forces in a particular system and is defined as
the ratio of the inertial to viscous forces:
Re =Lvρ
η, (1.1)
where L is the length scale of the object, v is the speed, and ρ and η are the density and
viscosity of the surrounding medium, respectively. For the rotary machine ATP synthase,
the Reynolds number of a 2 µm actin filament rotating at 100 rotations per second in a fluid
with the properties of water is approximately 2 ×10−5. Furthermore, the linear walker ki-
nesin pulling cargo with radius 100 nm at 1 µm/s has a Reynolds number of 1 ×10−7.
The Reynolds numbers of nanoscale machines are an important consideration when mod-
elling biological machines as well as when designing synthetic nanomachines [11]. At low
Reynolds numbers (Re� 1) the behaviour of the system depends solely on the forces that
are acting at that moment and does not remember the past through inertia [12]. In this
overdamped regime, behaviour is instead determined by the instantaneous applied force
while the force history has no lasting effect and therefore continuous forcing is required

CHAPTER 1. INTRODUCTION 5
for forwards motion. An object that is not presently being pushed will come to rest nearly
instantaneously.
1.2 FoF1 ATP Synthase
FoF1 ATP synthase is a molecular machine that synthesizes up to 90% of the ATP produced
in the cell [10, 13]. The complex consists of two components: Fo and F1. Fo spans a
membrane, commonly the mitochondrial membrane in eukaryotes, and harnesses energy
by allowing protons through the membrane. The energy arises from the electrochemical
gradient maintained across the mitochondrial membrane by other chemical processes in the
cell. In non-eukaryotic cells, ATP synthase is found in the cell membrane itself, since the
cell does not have organelle membranes. Fo is coupled to F1 through the rotation of a central
“crankshaft” and drives, at three sites in F1, the chemically unfavourable synthesis reaction
of ATP from ADP and inorganic phosphate. The machine can also operate in reverse,
consuming ATP to maintain a proton gradient. Furthermore, the units can uncouple, and F1
can be observed to operate as an ATP-burning motor (ATPase) when supplied with ATP.
1.2.1 Structure and Function
FoF1 ATP synthase is found in the membranes of bacteria, mitochondria in eukaryotic
cells, and chloroplasts in plant cells. As seen in Figure 1.1, Fo is membrane-bound while
F1 sits beside the membrane. The Fo unit has 3 types of subunits: a, b, and c. A single
a and two b subunits make up the stationary portion and remain fixed in the membrane.
Depending on the species, Fo has between 10 and 14 copies of the c subunit, which form
the c-ring [14]. The a subunit and c-ring complex are involved in the proton transfer across
the membrane; however, the exact mechanism remains unknown [15, 13]. F1 is made up
of a barrel structure with three-fold symmetry (α3β3), along with γ,δ and ε subunits. The
α and β subunits alternate to form a hexamer (6-component structure) with a barrel-like
arrangement. There is one catalytic site in each β subunit, near the interface with the
neighbouring α subunit. This is where ATP synthesis or hydrolysis occurs. Co-axial to the
barrel structure is the γ subunit, also called the crankshaft or γ-shaft. The ε subunit rotates
with the γ-shaft and couples with the c-ring. The δ subunit tethers the α3β3 barrel to the

CHAPTER 1. INTRODUCTION 6
✏
�
a
b2
cn Lipid bilayer
↵ ↵�
�F1 : ↵3�3��✏
Fo : ab2cn
Figure 1.1: Schematic diagram (not to scale) of ATP synthase. Fo is composed of ab2cn,
where n indicates that the c-ring has a variable number of subunits between different species
(typically 10-14 [14]). F1 is composed of α3β3γδε . Solid components (α3β3γ) indicate the
subunits typically used in experiments studying isolated F1.
two b subunits of Fo.
The rotating pieces (c-ring in Fo and γε in F1) are together referred to as the rotor,
and the stationary components (ab2 in Fo and α3β3δ in F1) the stator. In most biological
situations the FoF1 complex produces ATP; however, the system is capable of operating in
reverse by using ATP to generate a protonmotive force. This is common in the fermentation
process in anaerobic bacteria [16].
Furthermore, the F1 unit can detach from Fo and operate as a stand-alone reversible
system. When supplied with ATP, F1 operates as a motor, sometimes called ATPase because
it consumes ATP, and rotates the γ-shaft in the opposite direction to that during synthesis.

CHAPTER 1. INTRODUCTION 7
Due to the difficulty of working with integral membrane proteins, most experimental work
on ATP synthase has focused on only the F1 unit [8, 9, 17].
The rotation of ATP synthase was originally predicted purely from its structure and
known biochemical properties, best presented by Paul Boyer in 1993 [18]. The rotation
of the central crankshaft was directly observed in 1997, confirming the prediction that the
F1 unit is indeed a rotary machine [8]. However, these experiments were performed on
only a portion of the F1 unit (α3β3γ) and observed rotation due to hydrolysis. The rotation
of the c-ring was directly observed in 1999, confirming that the c-ring rotates with the γ-
shaft [19, 20]. These experiments were again performed in the ATP hydrolysis direction.
In 2004, Itoh et al. successfully produced ATP with isolated F1 (α3β3γ complex) by me-
chanically driving rotation in the synthetic direction using a rotating magnetic field [21].
This experiment confirmed both the reversibility of the machine and that ATP production
does not depend on the presence of the Fo unit.
1.2.2 Mechanochemical Coupling and Efficiency
ATP synthase is frequently said to be nearly 100% efficient and have perfect mechanochem-
ical coupling [9, 10, 22]. In these cases, efficiency refers to the energy transduction, or
transfer, between energy stored in the electrochemical gradient across the membrane and
the free energy stored in the phosphate-phosphate bond of ATP. This energy transfer is fa-
cilitated by the mechanical torque exerted on the γ-shaft. The ratio of protons let through
the membrane by Fo to ATP molecules produced in F1 (H+/ATP) is one way to quantify the
mechanochemical coupling. In [10], the authors argue that in the case of perfect coupling
the ratio (H+/ATP) should match the ratio of c subunits to β subunits, c/β , since one proton
is shuttled through the membrane for each c subunit. They observe a perfect match between
these ratios and were additionally able to resolve the energy stored in the electrochemical
gradient leading to the conclusion of 100% energy conversion. These experiments had ro-
tation rates of less than 1 rotation per second. In order to obtain accurate measurements in
single molecule experiments, the system is often driven slower than in vivo. ATP synthase
is believed to operate at hundreds of Hz in living cells [23], and it remains unclear how its
operation and efficiency might degrade at these higher speeds.
Another approach to estimating energy transfer efficiency is comparing the torque gen-

CHAPTER 1. INTRODUCTION 8
erated on a large filament attached to the γ-shaft in isolated F1 to the energy liberated
by ATP hydrolysis. Imaging experiments have confirmed that the γ-shaft rotates in three
120◦ steps, corresponding to the three catalytic sites on the barrel [14, 17, 24]. Addition-
ally, sub-steps of 80◦ and 40◦ have been resolved and mapped to intermediate states in the
chemical pathway: ATP binding/ADP release and Pi release, respectively [25, 17]. It is
well accepted that one full rotation of the γ-shaft corresponds to three identical catalytic
processes. The free energy change upon hydrolysis of ATP is approximately 20 kBT under
physiological conditions and therefore one hydrolysis (ATP consuming) cycle corresponds
to 60 kBT (247 pN nm) of free energy liberated from ATP. The chemical free energy is
used to generate a torque on the γ-shaft which pulls the attached filament through the vis-
cous surroundings, and the energy ultimately gets dissipated as heat into the surroundings.
By estimating the torque and therefore the work output of the machine, experimentalists
can estimate the efficiency. The work output is given by the product of the torque and the
angle swept out. Experimentalists have attached a large actin filament to the γ-shaft and
measured work output of ∼240 pN nm per cycle [8, 22], concluding that nearly 100% of
the chemical energy was transferred into mechanical rotation. This particular experiment
observed rotation rates between 0.1 and 8 rotations per second.
Certainly, experiments can be designed to measure the mechanochemical coupling and
efficiency of ATP synthase with impressive precision; however, all experiments so far that
find perfect coupling or 100% efficiency are conducted using stall forces or thermodynami-
cally equilibrated states. ATP synthase operates at hundreds of rotations per minute in vivo
and can reach maximum speeds of 350 revolutions per second at high temperatures and
surplus chemical reactants [23]. Does its efficiency degrade at these higher speeds in living
cells?
1.3 Energy-Speed-Accuracy Tradeoffs
The optimization of a process requires a clear definition of what aspects one wishes to
optimize. We might hypothesize that a cell optimizes for output of a certain reaction while
being constrained by dissipation. For example, ATP synthase needs to produce a high
number of ATP per second but is limited by the free energy available from the proton
gradient across the mitochondrial membrane. Optimizing for speed may lead to decreases

CHAPTER 1. INTRODUCTION 9
in the accuracy of a process and increase the work required. In this way, one expects
machine performance to face a three-way tradeoff between the speed, accuracy, and energy
(in the form of dissipation).
Tradeoffs of this nature have been explored in different cell biological systems. For
example, recent works have demonstrated a tradeoff between speed and errors in molecular
proofreading processes [26], a bound on precision set by the power and speed of physical
communication channels [27], and energy-speed-accuracy tradeoffs during environmental
sensing [28] and sensory adaptation [29].
1.4 Motivations and Goals
Molecular machines are impressively efficient stochastic energy transducers. These nanoscale
objects operate out of equilibrium and harness thermal fluctuations to achieve directional
operation. In order to define and explore the frontier of operating molecular machines, we
have developed a minimalistic model of a driven rotary machine inspired by the F1 unit of
ATP synthase. We vary the driving strength, rate of rotation, and intrinsic barriers between
states to explore the tradeoffs between energy, speed, and accuracy. We use energy to refer
to the work required to drive rotation and accuracy to refer to the response of the system to
driving. The Smoluchowski equation (the overdamped Fokker-Planck equation) is used to
evolve probability distributions on time-dependent energy landscapes. The search for the
frontier of machine operation leads to the question of whether there is some optimal way to
drive the system, instead of a naive constant-speed protocol. Theoretical work predicting
dissipation-minimizing driving protocols is applied to our model and assessed for applica-
bility. We create a minimal model independent of the molecular details of the F1 system, so
that our model can be applied to other rotary machines (such as bacterial flagella motors)
and inspire the design of synthetic machines.

Chapter 2
Theoretical Framework
In order to explore the nonequilibrium behaviour of a model of a molecular machine, we
must first build our tool kit of theory and intuition. This chapter sets the stage by intro-
ducing ideas from thermodynamics and statistical mechanics and discussing the additional
considerations of nonequilibrium systems. We build definitions of work and heat applica-
ble to our system, in order to quantify the effect of driving and consider the predictions of
work accumulation in a simple nonequilibrium system. Finally, we explore the theory of a
generalized friction, leading to an approximation of protocols that minimize excess work.
2.1 Nonequilibrium Thermodynamics
The laws of thermodynamics were developed in the 19th century in parallel with the devel-
opment of large machines like the steam engine and internal combustion engine. Questions
such as energy transfer using temperature gradients and predictions of efficiency in these
large systems drove the development of classical thermodynamics, which describes the bulk
behaviour of large systems near equilibrium. Limiting oneself to only studying behaviour
near equilibrium is a practical decision, since any isolated system, when left unperturbed,
will settle into the stationary state called thermal equilibrium. In systems with fast relax-
ation times, one can also suppose that the system relaxes so quickly into its new equilibrium
state that it spends an insignificant amount of time transitioning between equilibrium states.
To discard the messy details of nonequilibrium behaviour resulting from changing exter-
nal conditions, many classical thermodynamics problems start with the assumption that
10

CHAPTER 2. THEORETICAL FRAMEWORK 11
changes happen asymptotically slowly, meaning it takes an infinite amount of time for the
process under study to occur. This is called the quasistatic limit, and in conjunction with the
thermodynamic limit, which assumes the system has an infinite number of particles, we can
begin to see why the study of biological processes, which occur in small systems in finite
time, requires careful consideration before broadly applying thermodynamic relations.
Statistical mechanics explores the connection between macroscopic properties and the
underlying behaviour of individual molecules. While thermodynamics predicts average
properties, statistical mechanics asks about the distribution of microscopic states, some-
times called microstates. One of the most important results from statistical mechanics is
the Boltzmann distribution, which describes closed systems in thermal equilibrium. If the
energy of a microstate is εi, the probability of finding the system in that microstate is pro-
portional to e−εi/kBT , where kB is the Boltzmann constant and T is the temperature of the
system. Thermal fluctuations are the origin of deviations from average. An important prop-
erty of this distribution is that every state has a non-zero probability of occurring, and the
likelihood of observing a higher energy-state increases with temperature.
Nonequilibrium thermodynamics is a comparatively recent area of research and is still
evolving. In general, the aim is to describe systems that are not in thermal equilibrium, and
most progress to date has been made with systems near equilibrium. The motivation for
wanting to understand nonequilibrium systems should be apparent when considering the
quasistatic and thermodynamic limits and their contradiction with reality: most systems,
including all biological systems, are changing on finite time scales and are of finite size.
There are three common ways in which nonequilibrium systems are modelled: during
relaxation to thermal equilibrium, while being subjected to driving, and when detailed bal-
ance is broken. These situations are not mutually exclusive and indeed the response of a
system subject to driving is defined by its relaxation behaviour.
2.1.1 Example: The Three-State Cycle
To continue our discussion, let us become more concrete and consider a physical system
of finite size, for example a particle with three microstates, with respective energies ε1,
ε2, and ε3. The (macroscopic) state of the system can be defined as the set of occupancy
probabilities of each microstate. If we left the system connected to a thermal reservoir at

CHAPTER 2. THEORETICAL FRAMEWORK 12
constant temperature, it would eventually reach a steady state in which the probability of
occupying each microstate is constant. The particle can still switch microstates, but the
probability of being in each microstate is in agreement with the Boltzmann distribution,
and the system is said to be in thermal equilibrium. In general, the system could be out of
equilibrium in a few ways which we detail below.
Relaxation
First, it could be the case that it has not yet relaxed to thermal equilibrium and is instead
in a transient state. For example, consider starting with 100% probability in microstate 1
and then subsequently exchanging, or hopping, to occupy other microstates. In this thesis
we are not interested in transient behaviour, and instead limit ourselves to study systems
in steady state, meaning the statistics of the system are not dependent on when we are
conducting observations. The steady state is desirable because we are interested in the
system once it has lost memory of the initial conditions. In general, the steady state of
a system may depend on the initial conditions. One would want to consider all possible
steady states of the system to build a complete picture of the average behaviour to ensure
our description captures the expected observations, independent of initial conditions or time
of observation. In this case, we would check that the system reaches the same steady-state
distribution whether the system starts with 100% probability in microstate 1, 2, or 3.
Driving
Driving is the second way the system can be out of equilibrium. Driving refers to changing
the energy of the microstates. For example, we could increase the energy of microstate 1
relative to some baseline energy: ∆ε1 ≡ ε1− ε0, where ε0 is a baseline microstate energy
used as a reference point. In general, we can introduce the definition of a control parameter,~λ , that characterizes the driving. In this case, λi = ∆εi and therefore the elements of~λ are
the deviations of each microstate’s energy from ε0. The protocol ~Λ(t) contains the history
of ~λ , and in general the current state of the system depends on the entire history of the
control parameter. The system only remains out of equilibrium while ~λ is changing and
until it relaxes into thermal equilibrium for the new value of ~λ . For example, consider
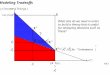
the evolution in Figure 2.1. The system starts with ε1 = ε2 = ε3 = ε0 = 5kBT and the

CHAPTER 2. THEORETICAL FRAMEWORK 13
equilibrium state of this system has equal probability in each state. The (average) energy
of the system is defined as:
E = ∑i
Piεi , (2.1)
where Pi is the occupancy probability of the ith microstate and the sum is over all possible
microstates. Therefore the energy of the starting equilibrium state is E = 13ε1+
13ε2+
13ε3 =
5kBT . The energy of microstate 1 is then increased by ∆ε1 = 3kBT and the system energy
is now E = 138kBT + 1
35kBT + 135kBT = 6kBT . Next, the system relaxes to the Boltzmann
distribution: P1 =e−8
e−5+e−5+e−8 ≈ 2%,P2 = P3 =e−5
e−5+e−5+e−8 ≈ 49%. The final equilibrium
energy of the system is E = 21008kBT + 49
1005kBT + 491005kBT = 5.06kBT . In the case of
continuous driving, the system does not relax to equilibrium before the control parameter
is again updated, leaving the system perpetually out of equilibrium.
Figure 2.1: Driving a three-state system. Initially, the system is in equilibrium with three
equal-energy microstates. Work is then done to change the energy of microstate 1. Next,
heat is released as the system relaxes into the new equilibrium distribution. All energies εi
are in units of kBT .
Breaking Detailed Balance
The third way to obtain a nonequilibrium system is by breaking detailed balance. The
previous discussions of relaxation and driving assumed detailed balance is obeyed at a
fixed value of control parameter: there is no net direction of probability flow intrinsic to
the dynamics [30]. When detailed balance is broken, there must be either cycles (periodic

CHAPTER 2. THEORETICAL FRAMEWORK 14
boundary conditions) or open boundary conditions. Both of these boundary conditions
allow net probability flow through the system, either by coming around the cycle or by
being created at one end and flowing out the other.
Consider again the system with three microstates: instead of defining εi for each mi-
crostate, we can introduce transition rates between each state, where Piki, j is the rate of
i→ j and ki, j is the rate constant. If the system obeyed detailed balance, there would be no
net flow between any two microstates once steady state is reached:
Piki, j = Pjk j,i . (2.2)
This case corresponds to equilibrium because the system is identical under time reversal,
also referred to as microscopic reversibility [31]. By contrast, one could also build a cyclic
system that does not obey detailed balance, but rather settles into a nonequilibrium steady
state (NESS) with a net probability flux through the system. This is achieved by imposing
transition rates that bias one direction, inducing net movement in the system even at steady
state. For example the transition rate constants going clockwise are made larger than the
counter-clockwise direction for each transition such that: Piki,i+1 > Pi+1ki+1,i.
In the case of a NESS, the occupancy probabilities are still static since the probability
flowing into a microstate from all other microstates equals the probability flowing out of the
microstate (a condition known as balance), but in general the occupancy probabilities do
not match those of the detailed balance construction [32]. The connections between NESSs
and driven stochastic systems, called stochastic pumps, are further discussed in [33] but are
not explored in this thesis.
2.1.2 Work, Heat, and Driving
The first law of thermodynamics states that energy cannot be created or destroyed, and
therefore changes in system energy must be due to energy flow between the system and the
environment. The change in system energy can be split into two parts:
∆E =W +Q , (2.3)
where W is the work and Q is the heat. Work is defined as the system energy change due
to changes in the microstate energies, whereas heat is associated with the change of the

CHAPTER 2. THEORETICAL FRAMEWORK 15
system energy due to moving between microstates [31]. The sign convention used here
defines positive work and heat as energy flow into the system. In the three-state cycle
example in Figure 2.1, the first step increases the energy of the top microstate and the
occupancy probabilities do not change, therefore the energy change is due to work being
done on the system. In the second step, the energies of the microstates remain fixed, but
the probabilities relax to the equilibrium distribution, therefore this decrease in energy is
associated with heat flowing out of the system. Note that the work required to change the
energy of a microstate depends on how many particles are present:
W = ∑i
NPi∆εi , (2.4)
where N is the total number of particles in the system.
It is convenient to think of system driving as two distinct steps: an instantaneous change
in microstate energies associated with work and subsequent relaxation associated with heat.
However, continuous driving means that the control parameter does not pause after each
infinitesimal change to allow the system to relax to equilibrium. Instead, the system relaxes
on a continuously changing landscape, and in general the occupancy probabilities at time
t do not match the Boltzmann distribution for λ (t). In some situations, we may expect the
system to lag behind the driving and perhaps match the Boltzmann distribution for some
earlier value of λ (t). This is referred to as an endoreversible process: the system and sur-
roundings are in equilibrium at any instant, though not necessarily with each other [34].
Furthermore there is no steady state since the system is continuously responding to chang-
ing λ , and in general we expect the deviation from equilibrium to depend on how fast the
driving occurs.
2.2 Driving of Cycles
Let us restrict our discussion of driving to cycles of period τ such that the perturbation is
periodic: λ (t) = λ (t + τ). Machines can be modelled as systems being driven through a
cycle of states, and indeed molecular machines have also been described with this frame-
work [5, 17, 35, 36, 9]. A system in equilibrium is reversible and therefore will have
an equal probability of completing “forwards” and “backwards” cycles, achieving no net
progress. Forwards can be used to refer to the desirable direction of operation, for example

CHAPTER 2. THEORETICAL FRAMEWORK 16
the ATP synthesis direction in F1. In general, a successful machine can be defined as a
system that achieves more forwards cycles than backwards. Biological machines operate
out of equilibrium and can achieve directed motion at an energetic cost in one of two ways:
experiencing periodic driving or breaking detailed balance [33].
2.2.1 Work Accumulation
In the previous section we introduced the concept of a control parameter that quantifies how
the system is perturbed. According to Equation 2.3, the energy of the system can change
through work done on or by the system and heat flowing between the system and a thermal
reservoir. As the cycle time τ approaches infinity, the system is driven in the quasistatic
limit and it is assumed that the system remains in equilibrium the entire time. Therefore,
the system returns to exactly the same state after a complete cycle. The work performed
during this isothermal (constant temperature), reversible process is equal to the free energy
difference over one cycle, W = ∆F = 0.
In the case of finite-time driving, the process is no longer reversible and the work re-
quired to drive one cycle is expected to exceed 0, in accordance with the Clausius Inequal-
ity [37]:
W ≥ ∆F. (2.5)
The excess work is defined as the work required to drive the system during the nonequilib-
rium protocol, above and beyond the work required to drive the system in the quasistatic
case [38]. Some of this excess work will be dissipated as heat during the cycle while
the rest will be stored in the system and is associated with the deviation from equilib-
rium. An analytic expression for nonequilibrium excess work is generally not possible
except in the simplest cases and in the linear-response regime. Work fluctuation theorems
describing the probability distribution of work have been developed for near-equilibrium
systems [31, 39, 40, 41, 37, 42]. A simple model of non-equilibrium driving is a particle in
a moving quadratic trap. This simple model can be applied to
2.2.2 Example: Quadratic Trap
An analytical expression for the excess work accumulated during non-equilibrium driving
is not generally available. Such an expression is derived for a Brownian particle dragged

CHAPTER 2. THEORETICAL FRAMEWORK 17
by a quadratic trap in [43]. This example summarizes their derivation for excess work as a
function of driving strength and speed. Their result serves as a guide for more complicated
constructions of driven systems including our model. Their model considers a particle
being pulled through a thermal medium of temperature 1/β (kB = 1) by a time-dependent
quadratic potential of form (Equation 4 in [43]):
U(x, t) =k2(x−ut)2 , (2.6)
where k is the trap strength, x is the spatial coordinate, and u is the speed of the trap
motion. The particle is assumed to have Langevin (over-damped, stochastic) dynamics.
The corresponding equation of motion is (Equation 5 in [43]):
x =− kmγ
(x−ut)+η , (2.7)
where mγ is the coefficient of friction (drag) and η is delta-correlated white noise with vari-
ance 2/βmγ . Due to the noise term, individual trajectories are not identical and therefore
will have different amounts of work accumulated. Furthermore, the initial conditions can
be assumed to be drawn from a distribution of states, also leading to work varying between
individual trajectories. The control parameter of the system is the location λ = vt of the
minimum of the trap. ∆F=0 for any trap repositioning, since the energetics of the equi-
librium distribution are independent of λ = vt. Therefore all accumulated work is excess
work. For an individual trajectory, the power (rate of work accumulation) is (Equation 7
in [43]):
W =∂U(x(t), t)
∂ t=−uk(x(t)−ut)
=−uky ,
(2.8)
where y≡ x−ut is the position of the particle relative to the minima of the trap. They then
consider the dynamics of the probability distribution representing an ensemble of particles
using the Fokker-Planck equation (Equation 9 in [43]):
∂P(y,w, t)∂ t
=k2
∂yP(y,w, t)∂y
+u∂P(y,w, t)
∂y+uky
∂P(y,w, t)∂W
+1
βmγ
∂ 2P(y,w, t)∂y2 . (2.9)

CHAPTER 2. THEORETICAL FRAMEWORK 18
Fokker-Planck equations will be further discussed in Section 3.3, but here we can see a
partial differential equation describing the evolution of the joint probability distribution of
the position and work accumulated as a function of time. By solving this equation, the
authors arrive at the transient and steady-state expressions for the expectation values of
position, work, and their respective variances and covariance. The steady-state (limit in
asymptotically long times) expressions are (Eq. 17 in [43]):
〈y(t)〉 → −mγuk
(2.10a)
〈W (t)〉 → u2mγt (2.10b)
σ2y (t)→
1βk
(2.10c)
σ2W (t)→ 2u2mγt
β, (2.10d)
where the angled brackets indicate average values. Note that the equilibrium distribution is
a Gaussian with mean y = 0 (centred within the trap) with variance 1/βk, and the nonequi-
librium distribution is also a Gaussian with variance 1/βk but centred at y =−mγu/k. The
nonequilibrium distribution is the equilibrium distribution corresponding to a past value of
the control parameter.
2.2.3 Work-Speed-Accuracy Tradeoffs
In Section 2.2.1, we found that divergence from equilibrium leads to accumulated excess
work, which can be interpreted as the energetic cost of driving the system out of equilib-
rium. Furthermore, the results for dragging a quadratic trap indicate that the cost increases
with speed of driving, leading to a tradeoff between the excess power required to drive the
system and the speed. While it is not expected that the quadratic trap results apply gen-
erally, the qualitative feature of requiring increased work with increased speed does agree
with our intuition about nonequilibrium driving. As speed increases, the instantaneous dis-
tribution differs more dramatically from the equilibrium distribution. Let us now consider
a cyclic version of the quadratic trap system in [43]: instead of moving forwards on an
infinite plane, consider a trap travelling around a ring. We can first consider the quasistatic
limit: assuming the probability distribution is in equilibrium for every value of λ , the centre
of the distribution is λ and on average the probability travels with the trap. As the driving

CHAPTER 2. THEORETICAL FRAMEWORK 19
speed increases, the system has less time to respond to the change and significant proba-
bility will be left behind rather than travelling with the trap. This represents an individual
realization in which the trap travelled around yet the system did not follow. It is therefore
important to quantify the accuracy of driving. We define the accuracy as the probability that
flows through the system over one cycle. In this case, we can consider the net probability
flow per lap of the trap.
The idea of a cyclic driving can be mapped to the F1 system. If we were to consider
the rotary system of F1, accuracy could be a measure of how many ATP molecules were
produced per rotation of γ . Since it is known that 3 ATP are produced per cycle during
100% efficient operation, an accuracy of 67% would mean 2 ATP are produced per rotation
of γ . While current experiments have so far confirmed F1 is capable of operating near
perfect efficiency, it is reasonable to allow for the possibility of slipping or lagging at
higher rates of rotation. Accuracy is a measure of the functionality of the machine: a low
accuracy means the system is not accomplishing its function, in this case producing ATP.
2.3 Optimal Control
We use “optimal control” to refer to the strategic design of a driving protocol to minimize
some cost function. For example, a driving protocol can be optimized for excess work,
meaning the optimal protocol is a minimum-dissipation procedure. There are various ap-
proaches to finding such work-minimizing protocols including exact solutions for a small
number of simple scenarios [44], solving the Burgers equation [45], or approximating via
the generalized friction [38]. Here we focus on the generalized friction approach.
It has already been proposed that an understanding of minimum-dissipation protocols
may contribute to an understanding of the efficiency of molecular machines, including
ATP synthase [38, 46, 47]. However, a universal framework for determining the minimum-
dissipation driving of any nonequilibrium system is yet to be developed because we require
an understanding of how nonequilibrium systems respond to external perturbations.
Early work into optimal control was confined to macroscopic systems in the quasistatic
limit and related the minimum dissipation to thermodynamic length, a measure of the dis-
tance between equilibrium states [48, 49]. If a system is to be driven between two equilib-
rium states, the process can be discretized into a finite number of steps. The quasistatic limit

CHAPTER 2. THEORETICAL FRAMEWORK 20
assumes the system equilibrates at each step before the next step is taken. An investigation
into the optimal time allocation for each step concluded that the optimal time allocation is
proportional to the largest relaxation time of the system [49]. This early connection to re-
laxation time scales hints at the fundamental connection between nonequilibrium dynamics
and equilibrium behaviour.
The motivation for optimal control designed to optimize for work is saving energy
by driving the system in the most efficient matter. However, in the quasistatic limit, the
system is driven asymptotically slowly, and therefore the work accumulation is equivalent
to the change in free energy of the initial and final equilibrium distributions for any driving
protocol. In other words, the excess work vanishes as τ approaches infinity, and there is no
benefit of using the minimum-dissipation protocol. Instead, we are interested in efficiency
gains from using minimum-dissipation driving protocols when the cycle time is finite. As
introduced in the previous section, a finite τ means that we cannot assume our system will
match the equilibrium distribution at a given control parameter.
Near-equilibrium approximations are the next step beyond quasistatic assumptions and
towards a general nonequilibrium framework. Near-equilibrium systems can be treated
in the linear-response regime, meaning the system responds linearly to external forces.
The linear-response approximation is expected to hold in systems with fast relaxation
times [50]. The earlier macroscopic theories using thermodynamic length have been ex-
panded to microscopic near-equilibrium systems through the development of a generalized
friction coefficient that approximates system response to nonequilibrium driving [38, 51].
2.3.1 Friction and Minimum-Dissipation Driving Protocols
The excess power along any protocol can be explicitly defined and has a simple form in the
linear-response approximation [38]. In this regime, the excess power, or rate of accumulat-
ing excess work, for a one-dimensional control parameter is given by:
Pex(t) =[
dλ
dt
]
tζ (λ (t))
[dλ
dt
]
t= ζ (t)
[dλ
dt
]2
t, (2.11)
where ζ (t) is the generalized friction coefficient and[
dλ
dt
]t
is the control parameter velocity
at time t. In general the friction depends on the value of the control parameter and therefore
varies over the protocol. Note that in this linear-response approximation the excess power is

CHAPTER 2. THEORETICAL FRAMEWORK 21
a function only of the instantaneous values of the control parameter and control parameter
velocity. In general the nonequilibrium work accumulation would depend on the entire
history of the system.
The total excess work accumulated over the protocol is the integral of the excess power:
Wex =∫
τ
0dtPex(t). (2.12)
The time integration can be converted into a spatial integral considering a segment of con-
stant velocity between two control parameter values:
Wex =∫
λ2
λ1
dλζ (λ )dλ
dt, (2.13)
and therefore Wex is proportional to the control parameter velocity. This agrees with the in-
tuition that faster driving increases the excess work per cycle. Furthermore, the dissipation
is inversely proportional to the protocol duration.
The generalized friction coefficient takes the form of a tensor in the case of multi-
dimensional control parameters. In the rest of our discussion, we will limit ourselves to
one-dimensional control parameters but note that the theory supports extension to multiple
dimensions. The friction can be thought of as a characterization of the resistance of the sys-
tem to the changing control parameter. It can be seen by considering Equation 2.11 that the
excess power is greatest in regions of highest friction for constant velocity protocols. The
minimum-dissipation protocol modulates velocity so as to accumulate work at a constant
rate throughout the protocol.
The friction is given by the time-integrated force covariance [38]:
ζ (λ )≡ β
∫∞
0dt〈δF(0)δF(t)〉λ , (2.14)
where δF(t ′)≡ F(t)−〈F〉λ is the deviation of the force due to the control parameter from
the average force at equilibrium for control parameter value λ . The friction is calculated
from the equilibrium force fluctuations, meaning the system is held at a fixed control pa-
rameter value to calculate the corresponding friction. By obtaining the friction for all values
of λ in the protocol λ , we can then calculate the theoretical excess work. The appeal of
this approach is that we can approximately calculate the excess work due to nonequilibrium
driving from instantaneous quantities calculated from equilibrium fluctuations.

CHAPTER 2. THEORETICAL FRAMEWORK 22
In order to gain more intuition about the friction coefficient, we can consider an alter-
nate decomposition:
ζ (λ ) = βτrelax〈δF2〉λ , (2.15)
where 〈δF2〉 is the equilibrium force variance, and
τrelax ≡∫
∞
0dt〈δF(0)δF(t)〉λ〈δF2〉λ
(2.16)
is the integral relaxation time of the system.
The form of Equation 2.15 tells us that the friction is expected to be higher in regions
of slow relaxation and large force variance and smaller in regions of fast relaxation times
and small force variance. The former high-friction case is associated with transitions over
energy barriers: the control parameter is such that there are multiple states with significant
probability. The latter case corresponds to a single minimum into which the system rapidly
equilibrates. Linking the friction back to the excess power, more excess work is accumu-
lated in regions of barrier crossing, when the system is most susceptible to changes in the
control parameter.
A minimum-dissipation protocol minimizes the excess work accumulated over the driv-
ing cycle. Since dissipation is proportional to the friction and inversely proportional to the
protocol time, one can minimize the dissipation by spending more time in regions of high
friction and less time in regions of low friction. Optimal protocols can be shown to modu-
late the control parameter velocity so as to accumulate excess work at a constant rate over
the entire protocol [38].
Another intuitive rationale for slowing down at the barriers comes from considering
the role of thermal fluctuations in the single-particle Langevin dynamics picture. Fokker-
Planck dynamics correspond to the ensemble behaviour of a single particle obeying Langevin
dynamics. The earlier the particle hops into the next well, the less work is required. When
the control parameter is centred over a barrier, the height of the barrier between the two
neighbouring states is minimized, and therefore the probability of hopping over due to a
thermal kick is maximized. Spending more time where the thermal transition rate is high
decreases the average transition time, thereby decreasing the work.
The minimum-dissipation protocol is obtained from the friction by applying the condi-

CHAPTER 2. THEORETICAL FRAMEWORK 23
tion that the optimal velocity is inversely proportional to the square root of the friction:
dλ MD
dt∝ ζ
−1/2 , (2.17)
where the proportionality constant is determined by the protocol time τ and the distance
between initial and final values of λ . The label MD is used to denote variables pertain-
ing to the minimum-dissipation protocol. It has been demonstrated that these dissipation-
minimizing trajectories are geodesics in thermodynamic space. Other works explore the
geometrical interpretations of this formalism in more detail [51, 52, 38]. A useful geomet-
ric result is that the shape is invariant with protocol time. In other words, the shape of the
minimum-dissipation protocol predicted by this linear-response approximation is indepen-
dent of τ: stretching or compressing the protocol to the desired total cycle time preserves
the optimization.
2.3.2 Ratio of Naive and Optimal Excess Work
The universal geometry of minimum-dissipation driving protocols (i.e. having τ-independent
shape) leads to the result that, in the linear-response approximation, the ratio of the excess
work for naive (constant velocity) protocols and the minimum-dissipation protocols de-
pends only on the friction over the control parameter space and not on the absolute cycle
time. In the linear-response approximation, the ratio of works is given by:
W naiveex
W MDex
=ζ
ζ 1/22 , (2.18)
where the bar indicates an average over the range of λ in Λ [50]. This result can be used
to predict the gain from using the minimum-dissipation protocol and will be tested in this
thesis.

Chapter 3
Model System
Computer simulations and models of real systems allow researches to assess their assump-
tions about the mechanism of operation. As experimental methods advance, models must
be reassessed to ensure a match between both macroscopic and microscopic behaviour.
Models and simulations of F1 have been developed in parallel with experiments. Many
recent experimental papers conclude with a proposed model [14, 17] while theorists build
their models based off experimental evidence and propose experiments to better elucidate
or test the details of their models [53, 18, 20, 36, 54, 55, 56, 57].
3.1 Goals of the Model
The present model was designed as a minimalistic, generalizable model of a rotary machine
subject to driving. Numerical methods were used to evolve the Fokker-Planck equation de-
scribing the time-dependent probability distribution of the state of the system. The present
model aims to capture the essential behaviour of the F1 machine while being subjected to
driving in the form of an external force applied to the γ-shaft in the synthetic direction.
The goal is to explore the tradeoffs of work, speed, and accuracy in a driven rotary ma-
chine, and therefore the microscopic details and specific conformational changes of the F1
machine are not included the model. The intention is to create a model that is generalizable
to any nanoscale rotary machine and not limited to the biologically accurate behaviour of
F1. Furthermore, the model should only include physically meaningful parameters such as
driving strength and internal resistance to driving and have the least number of parameters
24

CHAPTER 3. MODEL SYSTEM 25
necessary to capture the essential behaviour. The development of the model was guided by
the following ideas:
N Minima
The transformation of a continuous ensemble of system states into a finite number of pre-
ferred conformations is a popular way to model protein dynamics. It is known that F1 has
three identical catalytic sites and it is believed that one complete rotation then corresponds
to potentially 3 chemical reactions [53]. Additionally, the γ-shaft moves in discrete steps,
believed to correspond to chemical events [24, 14, 17, 25]. The present model assumes
three preferred angles to map to the simplest reduction of F1, but in general N energetic
minima could be introduced.
Two Coupled Systems
F1 is described as a mechanochemically coupled machine, meaning the chemical reactions
of ATP hydrolysis/synthesis occurring in the αβ barrel are coupled with the mechanical
rotation of the γ-shaft. Additionally, the driving by Fo, magnetic tweezers or other torque-
generation methods introduces a bias on the position of the γ-shaft, essentially creating
another layer of coupling. The present model follows the state of the system as a result of
driving, where the state of the system is captured by a single angular position. There are
two ways to interpret the system:
• Perfect coupling between the chemistry and γ-shaft: the system state represents
the angle of the γ-shaft and the chemistry is assumed to follow along. The γ-shaft is
free to rotate or not, depending on the strength and speed of driving.
• Perfect coupling between the γ-shaft and driving: the system state represents the
chemical coordinate with one jump of 120◦ corresponding to a single chemical event.
The angle of the γ-shaft is assumed to perfectly follow the control parameter value
while the chemistry is free to proceed or not, depending on the strength and speed or
driving.

CHAPTER 3. MODEL SYSTEM 26
No Chemical Bias
The concentrations of ATP, ADP and Pi in the surrounding environment affect the rate and
net direction of ATP catalysis (synthesis and hydrolysis) by F1. The present model assumes
that the chemical concentrations are fixed at equilibrium values such that no net rotation
occurs in the zero-driving case.
Exact, Autonomous Driving
The model assumes that the driving protocol is precisely defined prior to the protocol: there
is no uncertainty in the value of the control parameter at a particular time. Furthermore,
autonomous refers to the protocol not being a feedback process that depends on the system
state: the value of the control parameter is set independent of the state of the system and is
completely defined prior to the start of the protocol.
Over-damped Dynamics
Due to the low Reynolds number of F1 calculated in Section 1.1.2, it is valid to assume
the rotating γ-shaft has no inertia and the system obeys overdamped dynamics. In fact,
removing the large actin filament would further decrease the Reynolds number.
3.2 System Definitions
The time-dependent energy landscape, herein referred to as the potential, captures both the
intrinsic properties of F1 and the effect of the external driving by summing two components
to generate the total potential. The intrinsic potential, shown in Figure 3.1a, represents the
internal mechanics of F1 and therefore in the minimal representation has three minima at
0◦, 120◦, and 240◦ degrees, representing the three catalytic states. The barriers between
each state have a maximum height A.
The exact form of our potential is
Uintrinsic(θ) =A2
(1+ sin
[3(
θ +π
2
)]). (3.1)

CHAPTER 3. MODEL SYSTEM 27
The time-dependent driving potential,
Udriving(θ , t) =k2
(1+ sin
[θ − π
2−λ (t)
]), (3.2)
has a single minimum located at the position of λ (t). The driving strength is captured in
the parameter k which is the value of the driving potential exactly half a rotation away from
λ (t). Both A and k are in units of kBT .
The driving potential approximates driving by a magnetic field: a magnetic dipole feels
a force sinusoidal in the angle to the magnetic field. The minimum of the driving potential
is set by the driving protocol Λ. In the case of naive driving, λ (t) has a constant angular
velocity of 2π/τ . The minimum-dissipation protocol is calculated from the friction, as
further described in Section 4.3.
(a) (b)
π 2 π
A k
(a) (b)
�(t)π3
2 π3
π 4 π3
5 π3
2 π
0 2⇡ 0 ⇡ 2⇡2⇡/3 4⇡/3
Position of �
Ener
gy
A k
Figure 3.1: The two components of the potential defining the system. (a) The intrinsic
potential has three minima and energy barriers of height A. (b) The time-dependent driving
potential has a single minimum at the value of λ (t) and a height k.
3.2.1 Work and Heat
The energetics of the system are set by the potential and the energy of the system is there-
fore an average over the probability distribution P(θ , t):
E(t) =∫ 2π
0dθ P(θ , t)U(θ , t). (3.3)

CHAPTER 3. MODEL SYSTEM 28
The work is defined as the change of energy when the potential is updated, and the
heat is defined as the change in energy when the system relaxes on the static landscape.
Because of the discrete nature of simulations, these two processes are distinguishable sub-
steps within one update of time. These definitions match those introduced in Section 2.1.2.
3.3 System Dynamics
The dynamics of a stochastic process can be described by Langevin dynamics with the
general form:
dv =−U ′(x, t)
mdt− γvdt +
√2γ
βmdW (t) , (3.4)
where U ′(x, t) is the spatial derivative of the total potential, v is the velocity of the particle,
m is the mass, γ is the viscous drag or friction coefficient with units of inverse time, β ≡1/kBT , kB is Boltzmann’s constant, T is the temperature of the surroundings, and W (t) is
the standard Wiener process [30]. To better envision the impact of the Wiener process, note
that the discrete approximation used for numerical integration is dW (t) ≈√
dtN (0,1)
where N (0,1) is the standard normal distribution with 0 mean and unit variance. An
example of a Wiener process is simple diffusion. dW (t) and its pre-factor are sometimes
written simply as η(t) and called the Langevin force or noise term. η(t) is a Gaussian
random variable with zero mean and delta function correlations:
〈η(t)η(t ′)〉= 2γ
mβδ (t− t ′) , (3.5)
where δ (t− t ′) is a Dirac delta function. The Langevin equation provides a means to ob-
tain a single trajectory of the stochastic process - since random fluctuations are introduced
through the noise term, each individual simulated trajectory will be unique. One would
need to generate an ensemble of trajectories in order to obtain statistics on the macroscopic
properties of the system.
The Fokker-Planck equation is a partial differential equation used to describe the evo-
lution of a probability distribution for a system subject to Langevin dynamics. The system
is defined such that it has the same deterministic forces, drag, and diffusion that are defined
in Equation 3.4. In the overdamped limit, the system is assumed to have no inertia and the

CHAPTER 3. MODEL SYSTEM 29
left side of Equation 3.4 is therefore set to zero [58]. Such a system is sufficiently described
by a reduced form of the Fokker-Planck equation called the Smoluchowski equation:
∂P(x, t)∂ t
=− ∂
∂x[A(x)P(x, t)]+
12
∂ 2
∂x2 [B(x)P(x, t)] , (3.6)
where P(x, t) is the probability distribution of position as a function of time, A(x) is the
drift term and B(x) is the diffusion term. The exact forms of A(x) and B(x) can be derived
by considering the dynamics over a time ∆t such that ∆t is small enough that only small
changes have occurred, yet long enough that the process remains Markovian. In this limit,
A(x) =〈∆X〉
∆t(3.7a)
B(x) =〈(∆X)2〉
∆t, (3.7b)
and therefore the average and variance of the change in time ∆t is sufficient to define the
long-time dynamics.
The drift term is called such because A(x) is actually the drift velocity of the system,
resulting from the applied driving potential. The drift velocity vdrift is obtained by equating
the driving force (defined as the negative spatial derivative of the applied potential) with
the frictional force, resulting in a net zero force on the system:
0 = Fnet (3.8a)
=−U ′(x, t)−mγvdrift (3.8b)
vdrift =−U ′(x, t)
mγ(3.8c)
=−DU ′(x, t)
kBT(3.8d)
= A(x, t) , (3.8e)
where U ′(x, t) is the spatial derivative of the total potential. Note that a time-dependent
driving potential results in a time-dependent definition of A(x, t).
Secondly, B(x) can be derived by considering Equation 3.6 in the absence of driving
(A(x, t) = 0) and noting that this is in fact the diffusion equation:
∂P(x, t)∂ t
=12
∂ 2
∂x2 [B(x)P(x, t)] = D∂ 2P(x, t)
∂x2 , (3.9)

CHAPTER 3. MODEL SYSTEM 30
where D is the diffusion coefficient and is assumed to be constant in space. Therefore,
B(x, t) is a constant and can be defined using the Einstein relation:
B = 2D = 2kBTmγ
. (3.10)
Finally we arrive at the Smoluchowski equation defining the system dynamics in terms
of physical parameters:
∂P(x, t)∂ t
=D
kBT∂ [U ′(x, t)P(x, t)]
∂x+D
∂ 2P(x, t)∂x2 . (3.11)
3.3.1 Continuity Equation
The Fokker-Planck equation evolves a probability distribution, necessitating that probabil-
ity be conserved and leading to the continuity equation for probability density:
∂P(x, t)∂ t
=−∂J(x, t)∂x
, (3.12)
where J(x, t) is the probability flux. Intuitively, if we imagine a boundary at position x is
experiencing net flux of probability away, the probability must be getting depleted. From
this definition of flux, we obtain an equation for the probability flux:
J(x, t) = A(x)P(x, t)− 12
∂
∂xB(x)P(x, t)
=−DU ′(x, t)
kBTP(x, t)−D
∂
∂xP(x, t) .
(3.13)
3.4 Accuracy
The accuracy of the system is a measure of how well the system responds to the driving.
This is quantified by the net probability flux through the system over one cycle. An ac-
curacy of 100% means the system followed the driving perfectly, while less than perfect
accuracy can be interpreted as the probability that the system follows the driving cycle. For
example, an accuracy of 70% can be taken to mean that on average the system will suc-
cessfully complete 70% of the cycle, for each driving cycle. More precisely, the accuracy
η is defined as the integrated flux over one cycle averaged over all space:
η =∫ 2π
0
∫τ
0J(θ , t)dt dθ . (3.14)

CHAPTER 3. MODEL SYSTEM 31
3.5 Periodic Steady State and Rotational Symmetry
Since the potential is changing with time, the system is not assumed to ever be in equilib-
rium. As a result, the state of the system in general depends on the entire history of both the
system state and the driving potential. In particular, the state of the system depends on the
initial conditions. In all simulations, the system starts in equilibrium with λ (t = 0) = 0 and
driving drags the system into a nonequilibrium state. There is thus a transient phase—that
can last many cycles—during which subsequent cycles are not identical. However, we are
not interested in this transient behaviour and therefore evolve the system until each cycle
is identical, referred to as the periodic steady state (PSS). Squared differences between
probability distributions can be used to assess whether the following two conditions are
met.
While the probability is changing over the course of one cycle, the probability at a
particular time in the cycle is identical cycle to cycle, hence the term periodic. Specifically,
the first condition for whether the PSS has been reached is
P(θ , t) = P(θ , t + τ), (3.15)
for all t. Furthermore, the system is known to be three-fold symmetric, and therefore no
one angular state should be preferred over the course of an entire cycle. The PSS should
therefore be independent of the initial conditions. In other words, the second condition is
that the PSS at time t + τ/3 should exactly match a 120◦ rotation of the PSS at time t:
P(θ , t + τ/3) = P(θ −2π/3, t). (3.16)
In general, the PSSs do not converge on computationally accessible time scales. In the case
of large barrier heights, the transition rate is so low that the probability remains concen-
trated in the initial well. This is resolved by excluding cases in which less than 5% of the
probability flows around per cycle. This is rationalized by the argument that a machine
with barrier heights A so high as to inhibit cycling is not of interest.
Convergence to the PSS can also be assessed by tracking the heat and work flows. As
introduced in Section 2.2.1, a portion of the excess work can accumulate in the system, and
thus another test for the PSS is that all excess work is dissipated as heat and there is no net
accumulation of energy in the system.

Chapter 4
Methods
The Fokker-Planck equation and the specific form of the Smoluchowski equation in Equa-
tion 3.11 are partial differential equations describing the evolution of a probability distribu-
tion on a continuous, time-dependent, energy landscape. Due to the time dependence of the
energetics, neither an exact solution nor an analytic approximation of the system dynamics
is tractable. Numerical methods using a computer must therefore be used to evolve the sys-
tem. Finite difference methods and spectral methods are the two most common approaches
to numerically solving partial differential equations. Spectral methods are ideal for high
spatial resolution in multiple dimensions; however, we chose the simpler approach of finite
difference for our one-dimensional system and concluded that the computational cost of
sufficient resolution did not warrant switching to more advanced methods [59].
4.1 Numerical Fokker-Planck Dynamics
We chose to use the finite differences method with explicit time integration to evolve the
probability distribution. In order to be implemented numerically, the partial derivatives in
the Smoluchowski equation (Equation 3.11) must be replaced by discrete approximations.
Explicit time integration calculates the future state of the system using current values, while
implicit methods involve solving an equation for the current and future state. We chose an
explicit method for its simpler implementation. The approximations used in these simula-
32

CHAPTER 4. METHODS 33
tions are given by [59]:
∂
∂x[U ′(x, t)P(x, t)]≈ U ′(x+∆x, t)P(x+∆x, t)−U ′(x−∆x, t)P(x−∆x, t)
2∆x(4.1a)
∂ 2
∂x2 P(x, t)≈ P(x+∆x, t)+P(x−∆x, t)−2P(x, t)(∆x)2 , (4.1b)
where U ′(x, t) is the spatial derivative of U(x, t) (the exact derivative from continuous cal-
culus, not the numerical approximation).
The model discretizes the spatial coordinate in order to define the probability distribu-
tion; however, the true continuous form of U(x) is used because the applied potential is
continuous. The complete calculation of the update to the probability distribution is then
given by:
P(x, t +∆t) =P(x, t)
+D∆t
2kBT ∆x[U ′(x+∆x, t)P(x+∆x, t)−U ′(x−∆x, t)P(x−∆t, t)]
+D∆t
(∆x)2 [P(x+∆x, t)+P(x−∆x, t)−2P(x, t)] .
(4.2)
Periodic boundary conditions are used to match up the system at x = 0 = 2π .
4.1.1 Flux Calculation and Accuracy
The continuous form of the flux in Equation 3.13 must also be approximated with a discrete
difference method. In this case, the flux through a region of width ∆x over time ∆t is the
desired quantity. The desired flux is then given by:
J(x, t) = D(−U ′(x, t)P(x, t)
kBT− P(x+∆x, t)−P(x−∆x, t)
2∆x
)∆t∆x
. (4.3)
The accuracy, as defined in Equation 3.14, is obtained by taking the average of the cumu-
lative fluxes at each discrete position in the system. By construction, this scheme exactly
preserves probability normalization.
4.1.2 Periodic Steady State
Convergence to the PSS is assessed once per cycle using both criteria introduced in Sec-
tion 3.5. The squared difference (residual sum of squares) RSSN between the distributions

CHAPTER 4. METHODS 34
at λ = 0◦ is calculated for the current cycle and the previous cycle. If RSSN is less than
10−8, RSS240 is calculated. RSS240 is the squared difference between the current distribu-
tion for λ = 0 and the distribution for λ = 240◦ rotated forwards by 120◦. If RSS240 is
less than 10−5, the next cycle is recorded as the PSS. This means the cumulative flux and
work are initialized at the beginning of the PSS cycle and their final values are used as the
accuracy and work per cycle.
4.1.3 Stability
The approximation of a continuous differential equation with discrete updates requires that
the spatial and temporal bin sizes are selected such that the propagation is correctly resolved
on the lattice leading to a stable solution. The Fokker-Planck equation takes the form of a
wave equation:∂u∂ t
=−v∂u∂x
+12(∆x)2
∆t∇
2u , (4.4)
and therefore the Courant-Friedrichs-Lewy stability criterion is used to determine stabil-
ity [59]. The intuition of this stability criterion comes from considering the differencing
scheme used to update the system at each time point. The probability P(x, t) depends on
three points in the past: P(x−∆x, t−∆t),P(x, t−∆t), and P(x+∆x, t−∆t). In the wave
view of the equation, information in the form of the state of the wave travels at speed v.
In other words, the state at position x can only be affected by past events that are less than
v∆t away. This creates a cone of influence spreading back from the point P(x, t) encom-
passing all points affecting its new value. In the case of the Fokker-Planck equation, ∆x
and ∆t must be chosen such that the entire cone of influence is captured within the discrete
points being used in the differencing scheme, i.e. P(x−∆x, t−∆t)and P(x+∆x, t−∆t).
The Courant-Friedrichs-Lewy stability criterion requires:
|v|∆t∆x
< 1 , (4.5)
and comparison with Equation 3.11 yields v = DU ′(x, t)/kBT . Therefore in this specific
system the maximal time step is set by:
∆t < ∆xkBT
DU ′(x, t),∀x ∈ {0,2π}, t ∈ {0,τ}. (4.6)

CHAPTER 4. METHODS 35
The maximal value of U ′(x, t) is 32A+ 1
2k and therefore the maximal stable time step is
proportional to ∆x and kBT , and inversely proportional to D, A, and k. All simulations
were checked against the stability criteria:
∆t <1
2DkBT ∆x32A+ k
2
. (4.7)
To maintain consistency, the same time step was used in all simulations, but the stability
criteria was checked for each combination of parameters to ensure this choice was suffi-
ciently small to be used in all cases.
Figure 4.1: The cone of influence, shown as the shaded triangular region, must not go
beyond the 3 points at t−∆t affecting the point p(x, t).
4.2 Energy and Time Scales
In order to relate the results of the simulations to the behaviour of biological systems, the
energy and time scales must be compared with those of real systems. The motor F1 can
reach maximal rates of 350 revolutions per second [23]. Depending on the specific tether
and driving method used, experimentalists are able to conduct single molecule driving at
rates of 0-15 Hz [9, 21]. Corresponding torques of 0-70 pN nm/rad are estimated to be

CHAPTER 4. METHODS 36
acting on the γ-shaft [9]. Finally, the energy scale of the barriers between the angular states
of F1 can be estimated by observing the angular distribution within the three wells.
4.2.1 Setting the Time Scale
The time elapsed in the simulation must be mapped to meaningful time units in order to
compare with observed behaviour of F1. The diffusion coefficient is used to map between
simulation time and real time. The Einstein relation, D = kBT/mγ , allows for a direct
conversion by equating the experimental diffusion coefficient, Dexp, with the diffusion co-
efficient defined by the parameters kBT , and mγ 1.
In an experiment using a magnetic bead tethered to the γ-shaft, the experimental fric-
tional drag coefficient γexp is
mγexp = 8πηr3 +6πηy2r , (4.8)
where η is the viscosity of the surrounding liquid (ηH2O = 10−9pN s nm−2), r is the radius
of the bead, and y is the distance between the center of the bead and the rotational axis [36]2.
Using reasonable values for r and y (y = r = 0.287µm), and assuming room temperature
experiments (kBT =4.114 pN nm), Dexp can be estimated as:
Dexp =kBTmγ≈ 30 rad2/s. (4.9)
Furthermore, the simulation diffusion coefficient is
Dsim =1
1000tsim. (4.10)
The simulation time tsim is found by equating the two diffusion coefficients:
tsim =1s
1000 ·30≈ 30µs . (4.11)
1Other texts use ζ = mγ to denote the friction coefficient. Here we explicitly write out the separatecomponents to avoid confusion with the generalized friction coefficient.
2The equation in the publication is missing the factor of r in the second term. Communication with Xuconfirmed the correction presented here.

CHAPTER 4. METHODS 37
4.2.2 Energy Scales
Our model scales energy in units of kBT , with A and k setting the molecular and driving
energetics, respectively. As mentioned above, experimentalists are capable of generating
driving forces up to 70 pN nm/rad, leading to 240 pN nm (58 kBT ) of work per cycle [9].
Furthermore, the angular distribution of the system can be used to estimate the height,
A, of the intrinsic molecular barriers. Toyabe et al. report a standard deviation of σ =
20◦ = 0.35 rad around each well, and confirmed an agreement with the Einstein relation
kwidth = kBT/σ2, leading to a value of kwidth ≈ 8kBT . A quadratic trap with a spring
constant of kwidth maps to a value of A = 29kwidth in the present model (see Appendix A).
Therefore a value of A≈ 2kBT maps the present model to the F1 system.
4.3 Friction Calculation
The friction for a particular control parameter value, λ , as defined in Equation 2.14 is an
infinite-time integral of the force covariance. A schematic of this integral is depicted in
in Figure 4.2. At large time separations, the covariance of force decays to 0 and therefore
the infinite-time integral can be approximated by truncating the integration at a sufficiently
long time, t∗. The equilibrium force fluctuations must be simulated to obtain the average
force covariance.
The friction calculation is implemented by initializing the distribution with 100% of the
probability at one position, θ0, in the system and then building the average force covariance
integral by weighting the individual integrals by the probability of starting at θ0:
〈δF(0)δF(t)〉λ = ∑θ0
〈δF(0)δF(t)〉θ0P(θ0), (4.12)
where the subscript θ0 indicates the force covariance for the starting position θ0. Since we
are seeking the equilibrium force fluctuations, the driving potential is fixed at the value of λ
and therefore the system evolves on a static landscape, relaxing towards equilibrium. The
force refers to the force of the driving potential and not the total force; therefore, the force
used in this calculation is the negative spatial derivative of the driving potential defined in
Equation 3.2. The force is the sum of the force at a particular θ weighted by the probability

CHAPTER 4. METHODS 38
t
h�F 2i
00 t⇤
⇣(�) ⌘ �
Z 1
0
dth�F (0)�F (t)i�h�F (0)�F (t)i�
Figure 4.2: Schematic diagram of the equilibrium force covariance decay with time. The
y-intercept is the force variance and t∗ is the cut-off time. As t∗→ ∞, the area under the
curve approaches the true value of ζ (λ )/β .
distribution:
F(t) = ∑θ
−U ′driving(θ , t)P(θ , t). (4.13)
The force covariance for a particular value of θ0 is calculated as:
〈δF(0)δF(t)〉θ0 = (F(0)−Feq)(F(t)−Feq), (4.14)
where the equilibrium force Feq is zero. The force covariance averaged over all starting
positions is then given by the sum of the individual covariances weighted by the probability
of starting at position θ0:
〈δF(0)δF(t)〉λ = ∑θ0
〈δF(0)δF(t)〉θ0P(θ0)eq, (4.15)
where P(θ0)eq is the equilibrium probability of being at position θ0, defined by the Boltz-
mann distribution. The calculation is truncated when
〈δF(0)δF(t∗)〉λ〈δF(0)δF(0)〉λ
< 0.0001 , (4.16)

CHAPTER 4. METHODS 39
in other words, when the force covariance has decayed to less than 0.01% of the force vari-
ance. Once this condition is satisfied, the friction is calculated by numerically integrating
under the 〈δF(0)δF(t)〉λ curve using the left rectangular method 3. This crude approxi-
mation for the integral is valid because the time increment between saved force covariance
values, ∆t∗, is sufficiently small such that t∗� ∆t∗. Thus the friction is approximated by:
ζ (λ )≈t=t∗
∑0〈δF(0)δF(t)〉λ ∆t∗. (4.17)
4.4 Optimal Protocol Calculation
The friction, ζ , is calculated at particular control parameter values, where {λ}ζ is the set
of all λ for which ζ is calculated. The optimal velocities at these particular values of
control parameter are known to be proportional to ζ−1/2 under linear response [38]. It
is convenient to define the raw velocities as vraw(λ ) = ζ−1/2(λ ). A single proportional-
ity constant, α , is required to obtain the true velocities and is obtained by applying the
constraint that the protocol takes time τ to complete a cycle from 0 to 360 degrees. By
combining these constraints, the optimal control parameter protocol can be determined by
assuming constant acceleration between the points of known velocity. To our knowledge,
the following method for calculating the minimum-dissipation protocol from a discrete set
of known friction values is an original development.
The raw times refer to the unscaled time corresponding to each value of control param-
eter in {λ}ζ and are built iteratively from
ti+1,raw =2(λi+1−λi)
vi,raw + vi+1,raw+ ti,raw , (4.18)
where t0 ≡ 0 and λi is the ith element in {λ}ζ . The raw times can then be converted into
the true times for the minimum-dissipation protocol by scaling according to
ti,MD =τ
tfinal,rawti,raw , (4.19)
3The centre rectangular (midpoint) method should have been used. The left rectangular method leads to aconstant of 1/2〈δF(0)δF(0)〉λ added to each integral, increasing the calculated value of the friction.

CHAPTER 4. METHODS 40
where tfinal,raw is the raw time corresponding to the final control parameter value. The true
velocities for the optimal protocol can then be calculated from
vi,MD =tfinal, raw
τvi,raw . (4.20)
Finally, the optimal control parameter value for any time in the protocol can be cal-
culated by applying the kinematic equation for constant acceleration between two known
points:
λ (t) = λi + vi(t− ti)+(vi+1− vi)(t− ti)2
2(ti+1− ti), (4.21)
where i is chosen such that ti < t < ti+1 and the true velocities and times for the minimum-
dissipation protocol are used, although the subscripts MD have been dropped.

Chapter 5
Results
This chapter first considers naive (constant velocity) driving protocols, then explores the
friction calculations and (approximately) minimum-dissipation protocols, and finally com-
pares naive and minimum-dissipation protocols. The naive protocols also allow us to gain
an intuition about the system behaviour before turning to the minimum-dissipation driving
protocols. It should be emphasized here and throughout this section that the minimum-
dissipation protocols calculated with these methods assume the system exists in the linear-
response regime. In general, the true protocol that minimizes work accumulation may not
be well approximated by the existing theory applied here.
We explored the system response as a function of the intrinsic barrier height, A, driving
strength, k, and driving cycle time, τ , by considering the tradeoffs between excess work,
speed, and accuracy. In both naive and dissipation-minimizing driving protocols, there is
a tradeoff between accuracy and work as speed increases. Results are compared to the
prediction for work accumulation if driven by a quadratic trap on a flat landscape that was
introduced in Section 2.2.1. We also compare ratios of naive and minimum-dissipation
excess works and do find a decrease in the ratio of work and accuracy, and therefore there
is an advantage to using the minimum-dissipation protocol. The ratio of excess works is
also compared to the linear-response prediction introduced in Section 2.3.2.
All results shown are cycle averages in systems that have reached the periodic steady
state.
41

CHAPTER 5. RESULTS 42
5.1 Naive Driving Protocols
The naive driving speed is set by the cycle time τ: v = 2π/τ . The system is initialized
as a uniform distribution with λ = 0 and λ then proceeds as λ (t) = 2πtτ. Because of the
periodic boundary conditions of the system, λ returns to 0 at the completion of each cycle.
This choice has no influence on the final results due to the periodic form of the potentials
in Equations 3.1 and 3.2. The system is evolved until it satisfies the periodic steady state
conditions described in Section 3.5. Figure 5.1 shows visualizations of the PSS distribution
for three different values of k. Driving is in the counter-clockwise direction.
(a) (b) (c)
Figure 5.1: Polar plot of the PSS distributions over a third of a cycle. Dashed lines show the
instantaneous value of λ and the correspondingly coloured solid lines are the distribution
as visualized on a polar plot. The radial axis is the probability. Both plots have rotation
rate 14 Hz and barrier height A = 4 kBT . The driving strength k is (a) 32 kBT , (b) 16 kBT ,
or (c) 4 kBT .

CHAPTER 5. RESULTS 43
5.1.1 Accuracy and Work vs. Speed
Figure 5.2 shows the accuracy η , and excess work as a function of rotation rate, as well as
their ratio. The accuracy is defined as the net probability flow per cycle and characterizes
the average cycle completion per driving cycle, as in Equation 3.14. The flux is the accuracy
divided by the cycle time (η/τ). The excess work reported here is the cumulative excess
work over a single PSS cycle with protocol Λ, and since ∆F = 0 over a cycle, the work
equals the excess work.
Accuracy decreases monotonically with rotation rate for all explored values of barrier
height A and driving strength k. As the potential is changed more rapidly, the system does
not respond as strongly before the control parameter returns to its initial position.
The accuracy does not capture the influence of rotation rate on the production rate of
ATP. The flux is defined as η/τ and is therefore the average rate of probability flow, which
maps to the production rate of ATP.Tthe largest possible flux is limited by the rotation rate,
with the maximum flux (in the case of 100% accuracy) of 1/τ . Figure 5.2 shows that actual
flux peaks at intermediate rotation rate for some combinations of A and k. These peaks in
flux coincide with the crossover in accuracy.
Work peaks at intermediate rotation rates, for some combinations of A and k. Specifi-
cally, this feature only empirically occurs when k > A. The increase in work at slow rates
is expected: increasing speed increases the work because the system is being held further
from equilibrium. The exact scaling of work with rotation rate is further explored in Sec-
tion 5.1.2. In all cases with initially increasing work explored here, the work eventually
peaks and subsequently decreases as rotation rate increases further still.
The peaks in work (third row of Figure 5.2) coincide with the peaks in flux and with
the crossover in accuracy. The rotation rate was not altered with a resolution fine enough
to precisely match the work peak with the midpoint of the accuracy. The peaks in flux
and work leads to a tradeoff between speed and accuracy: for driving rates on either side
of the peak with the same amount of input work, the machine can achieve the same flux
while driven faster with lower accuracy or slower with higher accuracy. A plausible goal of
molecular machines is to complete a certain number of successful cycles in a given amount
of time. These results suggest that there are two rotation rates that lead to the same flux
and power: a slower driving rate with higher accuracy or a faster rate with lower accuracy.

CHAPTER 5. RESULTS 44
0.0
0.2
0.4
0.6
0.8
1.0
η
A=0 A=2 A=4 A=8
k (kBT)
1 2 4 8 16 32
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
η/τ
(Hz)
10-2
10-1
100
101
102
⟨ W⟩Λ
(kBT)
101 102100
101
102
103
⟨ W⟩Λ/η
(kBT)
101 102 101 102 101 102
Rotation Rate (Hz)
Figure 5.2: Accuracy, flux, excess work, and work/accuracy ratio as a function of rotation
rate for naive protocols. Intrinsic molecular barrier heights, A, vary between sub-plots
while driving strength, k, varies within each sub-plot. Top: accuracy decreases as cycle
rate increases. Second row: flux varies non-monotonically as rotation rate increases. Third
row: excess work per cycle varies non-monotonically as rotation rate increases. Bottom:
the ratio of excess work and accuracy increases as both rotation rate and A increase.

CHAPTER 5. RESULTS 45
Experimentalists acknowledge that they cannot distinguish between these cases from bulk
measurements of ATP synthesis rates [23].
The tradeoff between accuracy and work can be further explored by considering their
ratio, as in the lower row of Figure 5.2. Figure 5.3 shows the barrier-less (A = 0) work-
accuracy ratio from Figure 5.2, but on a linear scale. Here the ratio 〈W 〉Λ/η increases
linearly with rotation rate, with identical slopes of 1.18 kBT s for all values of k. In other
words, without molecular barriers, there is a constant work required per unit probability
pushed around the system, independent of driving strength k. This finding that barrier-less
work is independent of k agrees with the results in [43].
0 20 40 60 80 100 120 140
Rotation Rate (Hz)
0
20
40
60
80
100
120
140
160
⟨ W⟩Λ/η
(kBT)
k (kBT)
1
2
4
8
16
32
Figure 5.3: Ratio of excess work and accuracy for A = 0. The linear scaling with rotation
rate is independent of k and has a slope of 1.18 kBT s.

CHAPTER 5. RESULTS 46
5.1.2 Accuracy and Work
The ensemble properties can be considered in the space of accuracy (probability flow per
cycle) and work (Figure 5.4), and their corresponding rates: flux and power (Figure 5.5).
An ideal motor should maximize accuracy and minimize work while operating at high
speeds. Aiming for the upper left region of Figure 5.4 with maximal flow per cycle and
minimal excess work does not account for the disadvantage of requiring slow cycles. Al-
ternatively, an ideal motor reaches maximal flux of 1/τ with minimal power, occupying the
upper left region of Figure 5.5.
The theory lines in Figures 5.4 and 5.5, are independently derived from the quadratic
trap driving theory in [43] and introduced in Section 2.2.2. The value of k in the present
model maps, in the limit of large k, to a quadratic trap with spring constant 2k, see Ap-
pendix A. In the limit of large k, most of the probability is within the region for which
the quadratic approximation is valid, i.e. the trap is strong enough that there is insignifi-
cant probability anywhere but near the control parameter value. The theory predicts that a
quadratic trap dragged across an otherwise flat landscape accumulates work v2mγt where v
is the speed of the trap (2π/τ in this case), mγ is the viscous friction, and t is the elapsed
time (τ). Mapping the quadratic case to the A = 0 system, the work accumulated over one
cycle is predicted to be independent of k:
Wex ≈ mγ(2π)2
τ=
kBTD
(2π)2
τ, (5.1)
with corresponding power
〈Pex〉Λ ≈ mγ
(2π
τ
)2
=kBTD
(2π
τ
)2
. (5.2)
The lines in Figures 5.4 and 5.5 were obtained by multiplying the prediction for work
and power, respectively, by the accuracy on the vertical axis. The lines therefore correspond
to the linear decrease that would occur if the work (or power) decreased proportionally to
the total flow (or flux). For example, this assumes that if 50% of the probability is driven
around in the cycle, it costs half as much work as that predicted by the quadratic trap case.
Figure 5.5 plots rates rather than cycle averages and quantifies how much is accomplished
per unit time and how much ongoing operation costs. For rates, the quadratic trap theory
lines end at different maximum flux values, corresponding to 1/τ . This contrasts with the

CHAPTER 5. RESULTS 47
theory lines in the per cycle case. In both cases, decreasing the rotation rate shifts the theory
line towards the left. However, for rates, the largest flux possible is fixed by the rotation
rate 1/τ , thus emphasizing that slower is not necessarily better if there is a requirement to
maintain a certain level of production, i.e. complete cycles.
The insets in Figures 5.4 and 5.5 indicate that a linear decrease indeed occurs for the
A = 0 case, since all points for a given rate fall on the corresponding line. Furthermore, the
points for A > 0 all fall below their corresponding lines, indicating an increase in work due
to raising the intrinsic barriers that is not due to pushing proportionally more probability
around. In other words, the cost per probability is higher as A increases. This result is
more clearly seen in the lower row of Figure 5.2, where the ratio of 〈W 〉Λ/η increases
as A increases. The result that no points cross their corresponding line derived from the
quadratic trap driving indicates this is the frontier of possible operation: no combination of
A and k brings the machine closer to the region of maximal accuracy and minimal work.

CHAPTER 5. RESULTS 48
10-1
10-2
10-3
10-4
10-5
100
10-2 10-1 100 101 102
10-1
10-2
10-3
10-4
10-5
100
10-2 10-1 100 101 102
Figure 5.4: Accuracy and excess work per cycle for naive protocols. Points shown are for
A = 1,2,4,8 and k = 1,2,4,8,16,32. Colour denotes rotation rate. No points cross their
corresponding line derived from the quadratic trap driving, creating a frontier. Decreasing
rotation rate pushes the frontier towards the upper left. Inset: only the A = 0 points are
plotted to show the close match with the corresponding lines.

CHAPTER 5. RESULTS 49
10-2
10-1
100 101 102 103 104
100
101
102
10-3100 101 102 103 104
10-2
10-1
100
101
102
10-3
Figure 5.5: Probability flux and power averaged over one naive cycle. Points shown are
for A = 1,2,4,8 and k = 1,2,4,8,16,32. Colour denotes rotation rate. Decreasing rotation
rate pushes the frontier towards the optimal region in the upper left. Inset: only the A = 0
points are plotted to show the close match with the corresponding lines.

CHAPTER 5. RESULTS 50
5.2 Friction and Minimum-Dissipation Driving Protocols
The generalized friction quantifies the resistance of the system to changes in control pa-
rameter. The exact form of the friction is a function of equilibrium fluctuations, whereas
the purportedly minimum-dissipation protocol is only guaranteed to minimize dissipation
when linear response holds. Friction and minimal-dissipation velocities in Figure 5.6 are
calculated for discrete points at 10 degree increments and are plotted with straight connect-
ing lines to guide the eye. Following the notation used in Section 4.4, {λ}ζ is the set of
positions {0,10,20...360}. The minimum-dissipation protocol (Figure 5.6, lower row) is
obtained by extrapolating between known points using the method outlined in Section 4.4,
using a time increment of τ/1000.
Friction reaches its peak values when the control parameter λ is at the intrinsic barriers
(60◦, 180◦, and 300◦), while friction is minimized in the wells (0◦, 120◦, and 240◦). This
behaviour is observed for all combinations of A and k and agrees with the intuition that
friction is maximal in regions of slow relaxation and large force variance. When λ aligns
with a well, the system relaxes quickly into this metastable state. However, when λ aligns
with the barriers, there are two equal-energy wells, and therefore the force correlation time
is maximized. Recall that the force correlation in the definition of friction refers to driving
forces only (not the total force experienced at a particular position), and therefore the two
wells on either side of λ experience sign-reversed forces in the case of λ centred on a
barrier: one side experiences only positive deviations from the average while the other
experiences only negative values.
The amplitude (difference between maximal and minimal values) of the friction is not
monotonic with k. Additionally, the average value of the friction over all angles is not
monotonic, as seen in Figure 5.7. Yet the observed behaviour does match with intuition for
the zero driving and strong driving limits. In the weak driving limit (k� A) the forces due
to driving are negligible and therefore the equilibrium fluctuations do not vary significantly
as λ is moved, and thus the friction has a smaller amplitude. For extremely strong driving
(k� A), the molecular landscape varies negligibly with λ compared to the scale of the
driving potential, so equilibrium fluctuations again do not vary significantly depending on
whether λ is aligned with a well or a barrier, leading to a decrease in amplitude again, but
this time because the energy landscape is dominated by the effect of driving. Furthermore,

CHAPTER 5. RESULTS 51
0 π/3 2π/3 π 4π/3 5π/3 2π102
103
104
ζ(k
BT·s)
1
0 π/3 2π/3 π 4π/3 5π/3 2π
λ (rad)
A=2
k (kBT)
1 2 4 8 16 32
0 π/3 2π/3 π 4π/3 5π/3 2π
4
0 1/6 1/3102
103
dλ
MD
dt
(rad/s
)
0 1/6 1/3
λ (rad)0 1/6 1/3
0 1/6 1/30
1/6
1/3
λM
D/2π
0 1/6 1/3
t/τ0 1/6 1/3
Figure 5.6: Friction (top) and minimum-dissipation velocities (middle) as a function of
control parameter, and the minimum-dissipation protocols (bottom). Intrinsic molecular
barrier heights, A, vary between sub-plots while driving strength, k, varies within each sub-
plot. Note: the relaxation time for k = 1,A = 4 is exceedingly long—precluding accurate
estimation of the friction—so this data is omitted.

CHAPTER 5. RESULTS 52
100 101
k (kBT)
102
103
104
⟨ ζ⟩ λ(k
BT·s)
A (kBT)
1
2
4
Figure 5.7: Spatial average of the friction as a function of driving strength k, for varying
barrier heights. The average friction increases with A and peaks at intermediate values of
k. Dashed line is the expected friction for a quadratic trap on a flat landscape.
the average value of the friction can be predicted in the strong driving limit on a flat land-
scape (A = 0). In this case, the system is approximated well by the quadratic trap driving,
which has a constant friction of mγ = kBT/D. By considering the large k behaviour in
Figure 5.7, the system does indeed converge to the value of mγ used in the simulations,
1000 kBT s, denoted by the dashed line.
The linear-response approximation of the optimal protocol yields a velocity propor-
tional to the inverse square root of the friction (Equation 2.17); hence, the maximal ve-
locities correspond to the minimum values of friction, and vice versa (Figure 5.6, middle
row). The minimum-dissipation velocities and corresponding protocol are shown only for

CHAPTER 5. RESULTS 53
a third of a cycle, covering 2π/3, since the system is periodic and the other two periods
are identical. The control parameter position is interpolated by assuming constant acceler-
ation between points of known velocity. Finally, because of the τ-independent shape of the
protocol, it has been reported here as a function of nondimensionalized time: t/τ .
Figure 5.8 shows for minimum-dissipation driving cycles the accuracy, flux, excess
work, and work/accuracy ratio. These show the same qualitative features as for naive pro-
tocols ( Figure 5.2). Figures 5.9 and 5.10 report the minimum-dissipation results in the
spaces of accuracy-work and flux-power, respectively. All points are still constrained by
the apparent frontier quantified from the quadratic trap driving approximation. The next
section compares the naive and minimum-dissipation protocols directly.

CHAPTER 5. RESULTS 54
0.0
0.2
0.4
0.6
0.8
1.0
η
A=0 A=2 A=4
k (kBT)
2 4 8 16 32
10-7
10-6
10-5
10-4
10-3
10-2
η/τ
(Hz)
10-2
10-1
100
101
102
⟨ W⟩Λ
(kBT)
101 102100
101
102
103
⟨ W⟩Λ/η
(kBT)
101 102 101 102
Rotation Rate (Hz)
Figure 5.8: Accuracy, flux, excess work, and work/accuracy ratio, as a function of driving
rate for the minimum-dissipation protocols predicted by linear-response theory. Intrinsic
molecular barrier heights, A, vary between sub-plots while driving strength, k, varies within
each sub-plot. Top: the accuracy decreases as cycle rate increases in all cases. Second row:
the flux changes non-monotonically as driving rate increases. Third row: excess work per
cycle changes non-monotonically as driving rate increases. Bottom: the ratio of excess
work and accuracy increases as both rotation rate and A increase.

CHAPTER 5. RESULTS 55
10-1 100 101 102⟨W⟩
Λ (kBT)
10-4
10-3
10-2
10-1
100
η
Rate (Hz)
133
66
33
16
8
4
2
Figure 5.9: Accuracy and excess work per cycle for minimum-dissipation protocols. Points
shown are for A = 1,2,4 and k = 1,2,4,8,16,32. Colour denotes rotation rate. No points
cross their corresponding line derived from the quadratic trap driving, creating a frontier.
Decreasing rotation rate pushes the frontier towards the upper left.

CHAPTER 5. RESULTS 56
100 101 102 103 104⟨Pex
⟩Λ (kBT/s)
10-2
10-1
100
101
102
Flux (
1/s)
Rate (Hz)
133
66
33
16
8
4
2
Figure 5.10: Probability flux and power averaged over one minimum-dissipation driving
cycle. Points shown are for A = 1,2,4 and k = 1,2,4,8,16,32. Colour denotes rotation
rate. Decreasing rotation rate pushes the frontier towards the optimal region in the upper
left.

CHAPTER 5. RESULTS 57
5.3 Minimum-Dissipation vs. Naive Driving Protocols
Figure 5.11 reports the ratios between naive and minimum-dissipation protocols of the
accuracy η , excess work W , and the work-accuracy ratio W/η . Interestingly, the accuracy
is higher in the naive driving case, although significant accuracy differences only appear
in the A = 4 case. Further investigation into this behaviour is required in order to gain an
understanding of its origin. The ratio of the excess works is compared to the ratio predicted
in Equation 2.18: ζ
ζ 1/22 . The prediction is shown as the dashed lines in the middle row.
Agreement with this prediction is found in the A = 1,2 cases for low driving rates.
The ratio ζ
ζ 1/22 characterizes the spatial variability of the friction. When the spatial
variability in friction is most extreme, the minimum-dissipation protocol predicted by the
linear-response theory deviates most from naive. When the MD protocol differs more from
the naive protocol, there is a larger gain when the MD schedule is used. It is for this reason
that the largest ratio between naive and MD is when the friction is most extreme. Figure 5.6
shows that intermediate values of k lead to the most extreme spatial variability in friction.
The ratio of naive to minimum-dissipation W/η (bottom in Figure 5.11) seems to tend
towards 1 at large rotation rates for all values of A. The work differences are quite sig-
nificant: in the A = 4 case, the naive protocol requires over 40% more work than the
minimum-dissipation protocol. The barrier heights in F1 correspond well to the A = 2
case of our model. At slow driving rates, the naive protocol does nearly 20% more work
than the minimum-dissipation protocol. Finally, the bottom row explores the ratio of the
scaled work: the work per probability pushed. This quantity is arguably more meaningful
in this context, since a decrease in work during the minimum-dissipation protocol could
arise from a decrease in accuracy.
The trend of maximum differences between the two protocols at low rotation rates is
still apparent: the minimum-dissipation protocol does indeed dissipate less energy per unit
probability than the naive driving.

CHAPTER 5. RESULTS 58
⌘naive
⌘MD
W naive
WMD
(W/⌘)naive
(W/⌘)MD
Figure 5.11: Ratios of accuracy, excess work, and W/η for the naive and minimum-
dissipation protocols. Accuracy (top) is higher in the naive driving case. At low rotation
rates, the naive work is larger than that for the minimum-dissipation protocol (middle). At
high rotation rates, the ratio tends to 1. However, at intermediate rotation rates there is
no clear common trend. The dashed lines show ζ
ζ 1/22 . The scaled ratio (bottom) follows
similar trends as the work ratio.

CHAPTER 5. RESULTS 59
5.4 Parameter Ranges: Discussion and Limitations
The range of parameter space explored was set by a combination of computational limita-
tions, a desire to focus on regions of interesting behaviour, and biological relevance. With
the motivation of studying efficient machines, parameter combinations in which less than
5% of the probability responds to driving were deemed low priority. For this reason, anal-
ysis focused on values of A less than k. Furthermore, rotation rates faster than 133 Hz
posed computational challenges, especially during minimum-dissipation protocols, since
it pushed the limits of simulating continuous driving. Since the accuracy dropped signifi-
cantly by these top speeds and since the biological system is believed to operate at ∼ 100
Hz, this was deemed an acceptable upper bound. Regarding slowest driving rates, the com-
putational resources required to push to slower rotation rates was not set as a priority over
other analysis. Further work could and should explore the asymptotic behaviour at slow
driving. However, since this work chose to focus on biologically relevant time scales, that
study is left to a later date.
The range of A was set by computational limitations and the fact that accuracy was in-
significant in all but the strongest and slowest driving cases. In the case of strong barriers,
the relaxation time of the system is large enough to make the friction calculation compu-
tationally intractable using the strict convergence criteria applied at lower barrier heights.
One could adjust the calculation to use small time increments near the initial relaxation and
then switch to larger time steps when the dynamics become slow; however, this was not
performed.

Chapter 6
Conclusions
This research set out to explore the fundamental limitations of molecular machines by
developing a minimalistic model. Our model is general enough to capture the essential
physics of a driven stochastic rotary machine, yet is detailed enough to have a physical
interpretation that maps to biological molecular machines. Fokker-Planck dynamics were
used to numerically study the evolution of nonequilibrium probability distributions of a
driven system. The accuracy, speed, and excess work were quantified for periodic steady
state cycles. Existing theoretical work was applied to search for minimum-dissipation driv-
ing protocols in an attempt to further improve the tradeoffs.
Our results find a significant tradeoff between accuracy and work over the range of
speeds corresponding to experimental and biological rotation rates of F1. Specifically,
for the same input work, one can go faster with lower accuracy or slower with higher
accuracy. Furthermore, the frontier of machine operation in the space of accuracy and work
appears to be well predicted by the work accumulation function for a quadratic potential
on a flat landscape in the linear-response regime. Intrinsic barriers lead to an increase in
work required to drive the same amount of probability through the system. However, the
intrinsic barriers represent the discrete chemical events synthesising or hydrolysing ATP.
In order for this model to well approximate mechanochemically coupled F1, finite barrier
heights are necessary.
60

CHAPTER 6. CONCLUSIONS 61
6.1 Significance
6.1.1 ATP Synthase
The value of A = 2 in our model best approximates the barriers in F1. This class of systems
saw a significant change in behaviour as both rotation rate and driving strength are varied.
At rotation rates comparable to those used in single molecule experiments and strong driv-
ing (k > A), accuracy was at least 50%. However, at over 100 Hz, accuracy dropped to less
than 20% even for the strongest driving applied here (k = 32). Our model therefore pre-
dicts a significant decrease in accuracy when the system operates at the rates we believe are
achieved in active cells. In the A= 2 case, our model predicts that the minimum-dissipation
protocol we approximated decreases the energetic cost of driving probability through the
system, with the naive protocol costing nearly 20% more in the k = 16 case.
Comparing our naive and minimum-dissipation driving protocols to the actual mo-
tion of the γ-shaft suggests that ATP synthase’s operation is more like the minimum-
dissipation protocol. When F1 is run as an ATP-burning motor in diffusion-limited con-
ditions, the γ shaft hops between discrete angular positions, rather than proceeding at a
constant speed [14]. Furthermore, crystal structures used to connect γ’s motion with the
chemical reactions indicate that the crankshaft remains fixed at well-defined angles during
the “catalytic dwell” and while waiting for diffusion of reactants into active sites [17]. It is
plausible that γ pauses at these precise angles to hold the catalytic sites in conformations
that correspond to a midpoint between their own metastable states. Indeed, their crystal
structures resolve “half-closed” and “half-loose” states (referring to the state of β and the
αβ interface, respectively), and the authors argue that these intermediate structures are
crucial to the tripartite coupling between catalytic sites that they propose for the conforma-
tional cycle of F1.
Thinking instead about operation in the ATP synthesis direction when F1 is driven by
FO, it is also likely that non-naive protocols are a more faithful picture of γ’s behaviour.
The mechanism through which the c-ring rotates γ is not well understood, but is believed
to occur as n individual steps, where n is the species-specific number of c subunits [15].
We are not proposing that ATP synthase rotates in discrete steps because of evolutionary
forcing towards non-constant driving: every process tied to chemical reactions will have to
proceed as a series of discrete events when considered on a time scale in which individual

CHAPTER 6. CONCLUSIONS 62
reactions are resolved and appear as instantaneous events. However, it could be possible
that the conformations of the waiting dwells have been optimized in agreement with the
predictions of minimum-dissipation protocols. That would mean pausing in FO conforma-
tions that create comparable probabilities for the “before” and “after” states of F1, allowing
the system to optimally harness thermal fluctuations to drive the cycle forwards.
6.1.2 Artificial Machines
Our work explored the tradeoffs of accuracy, excess work, and speed while driving a cyclic
stochastic machine. While we were inspired by the goal of driving ATP production, our
findings can apply to enzymes that catalyze other reactions or other stochastic processes
that can be quantified within a cyclic framework.
Our results agree with the intuition of dissipation-minimizing protocol design: drive
fast in regions of fast relaxation and slow in regions of high potential barriers. While we
imagined that our perturbation to the intrinsic energy landscape of the system was caused by
a magnetic field, the results are generalizable to any form of driving capable of influencing
the energetics of the system in a cyclic manner that is not time reversible: the change in
control parameter is distinguishable under time reversal.
6.2 Future Work
6.2.1 Extending the Model
Our model was deliberately designed to be generalizable and minimalistic. However, this
model could be extended to better capture the details of a specific system, such as F1. For
example, our current model couples two systems and assumes perfect coupling either be-
tween the magnet and γ or between γ and the chemistry. One could add another layer of
coupling to represent a third level of the system to loosen the assumption of perfect cou-
pling. Our current system has two levels and therefore adding a third is a natural next
step. These three levels would represent the driving, γ crankshaft, and the chemical co-
ordinate. Furthermore, our model considers one-dimensional state variables: driving and
γ are each specified by a single parameter, θ0 and angular position, respectively. If the

CHAPTER 6. CONCLUSIONS 63
chemical coordinate were to be added, it might be best described as a multidimensional
state; for example, each of the three catalytic sites could be in one of several possible states
representing ATP bound, open, etc.
More compelling still would be to consider feedback to better map the model onto an
FO-driven system. If γ was instead being turned by FO, it is reasonable to believe that the
driving could sense the current state of F1 and feel resistance to progression if there is a
lag. For example, there could be a greater work cost if the driving proceeded too far ahead
of the probability, but conversely could potentially increase the accuracy.
6.2.2 Adaptive Time Step Friction Calculation
The friction calculation we used became computationally intractable for barrier heights
larger than 4, due to the long relaxation times. An algorithm using adaptive time steps
could improve the speed of the calculation without significant loss of detail. The algorithm
would use a short time step in the Fokker-Planck dynamics during the rapid relaxation after
initialization. Once the force correlation has dropped below a certain threshold and dynam-
ics are not changing as rapidly, a larger time step can be used. The initial fast relaxation
is because the system is initalized from a delta function, and therefore a sufficiently small
time step is required to avoid negative probability left in any bin.
6.2.3 Higher-Order Corrections to Minimum-Dissipation Protocol
The approximation of the minimum-dissipation protocol we used assumed linear-response.
However, linear-response is not necessarily expected to hold in our system. At low rota-
tion rates, the predictions for the ratio of naive and minimum-dissipation work agree with
the theory, suggesting that the system is in linear response at these rates (Figure 5.11).
However, at higher rotation rates, there is a deviation from the predictions.
Returning to the original derivation of the minimum-dissipation protocol, it is not ex-
pected that the protocol remains shape-invariant with driving rate. Rather, the rate of rota-
tion will influence the dissipation-minimizing protocol. By observing the PSS distributions
in the case of fast driving, the system is observed to lag behind the control parameter by a
fixed amount, as large as 30◦.

CHAPTER 6. CONCLUSIONS 64
It is possible that the next leading correction to the protocol involves a velocity-dependent
shift of the control parameter trajectory: the shape of the trajectory remains the same but
the locations of maximal velocity are not aligned with the minima of the potential. Such
a shift would result in the peaks in control parameter velocity occurring after the centre
of the barrier: the control parameter rushes over the peak while significant probability is
still relaxing in the previous well, and then the control parameter slows down afterwards to
allow the system to catch up 1.
6.2.4 Experimental
As experimental techniques advance, the ability to resolve faster dynamics is possible.
Observing the rotation of γ while being driven by FO would further our understanding of
the angular states that γ occupies in vivo. The 3 (or 6) dwells that have been observed for
isolated F1 are not necessarily representative of the system when also tethered to the c-ring,
since the symmetry of the ring has a different periodicity (10-15 discrete rotation events per
complete 360 degree rotation). When both subsystems operate together as in the complete
ATP synthase, γ will feel both the torque of the c-ring and the wells of F1, perhaps leading
to a novel steady-state angular distribution.
It would also be interesting to revisit the angular distributions from past experiments.
Our results indicate that accuracy significantly decreases for weaker driving and faster ro-
tation rates. It would be interesting to revisit the weakly driven data from experiments and
distinguish between futile cycles (γ did not go around) versus occasional backwards cycles,
since both could sum to the same number of net forwards cycles, but would have different
implications about the response to driving. Results shown in [9] hint at the former case, but
a complete analysis could reveal more insight.
Finally, experimental verification of our finding that the minimum-dissipation protocol
significantly reduces the excess work could be conducted using single-molecule techniques
that already exist. By combining existing methods of measuring excess work, observing
rotation rate, and controlling the orientation of magnetic fields, it would not be beyond the
capabilities of an exceptional experimental group to conduct these experiments.
1Based on personal communication with Tomohiro Shitara and David. A. Sivak

Bibliography
[1] E. Schrodinger. What is Life? Cambridge University Press, Cambridge, 1967.
[2] A. B. Kolomeisky and M. E. Fisher. Molecular motors: a theorist’s perspective. Annu.
Rev. Phys. Chem., 58:675–95, 2007.
[3] G. Cooper and R. Hausman. The Cell: A Molecular Approach. Sinauer Associates,
Sunderland (MA), 6th ed. edition, 2013.
[4] F. Kozielski. Kinesins and cancer. Nat. Rev. Cancer, 12:527–39, 2015.
[5] N. J. Carter and R. A. Cross. Mechanics of the kinesin step. Nature, 435(5):308–312,
2005.
[6] M. Fliegauf, T. Benzing, and H. Omran. When cilia go bad: cilia defects and cil-
iopathies. Nat. Rev. Mol. Cell Biol., 8(11):880–93, 2007.
[7] R. Phillips, J. Kondev, J. Theriot, and H. Garcia. Physical Biology of the Cell. Garland
Science, New York, 2nd ed. edition, 2013.
[8] H. Noji, R. Yasuda, M. Yoshida, and K. Kinosita. Direct observation of the rotation
of F1-ATPase. Nature, 386(3):299–302, 1997.
[9] S. Toyabe, T. Watanabe-Nakayama, T. Okamoto, S. Kudo, and E. Muneyuki. Thermo-
dynamic efficiency and mechanochemical coupling of F1-ATPase. Proc. Natl. Acad.
Sci. U. S. A., 108(44):17951–6, 2011.
[10] N. Soga, K. Kimura, K. Kinosita, M. Yoshida, and T. Suzuki. Perfect chemomechan-
ical coupling of FO F1 - ATP synthase. Proc. Natl. Acad. Sci. U.S.A., 114(9):4960–
4965, 2017.
65

BIBLIOGRAPHY 66
[11] G. A. Ozin, I. Manners, S. Fournier-Bidoz, and A. Arsenault. Dream nanomachines.
Adv. Mater., 17(24):3011–18, 2005.
[12] E. M. Purcell. Life at low Reynolds number. Am. J. Phys., 45(1):3–11, 1977.
[13] V. Leone and J. D. Faraldo-Gómez. Structure and mechanism of the ATP synthase
membrane motor inferred from quantitative integrative modeling. J. Gen. Physiol.,
148(16):441–57, 2016.
[14] R. Yasuda, H. Noji, M. Yoshida, K. Kinosita, and H. Itoh. Resolution of dis-
tinct rotational substeps by submillisecond kinetic analysis of F1s-ATPase. Nature,
410(4):898–904, 2001.
[15] R. H. Fillingame, C. M. Angevine, and O. Y. Dmitriev. Coupling proton movements
to c-ring rotation in Fo F1 - ATP synthase: aqueous access channels and helix rotations
at the a− c interface. Biochim. Biophys. Acta, 1555:29–36, 2002.
[16] J. Weber and A. E. Senior. Catalytic mechanism of F1-ATPase. Biochim. Biophys.
Acta - Bioenerg., 1319(1):19–58, 1997.
[17] M. Sugawa, K. Okazaki, M. Kobayashi, T. Matsui, G. Hummer, and T. Masaike. F1
-ATPase conformational cycle from simultaneous single-molecule FRET and rotation
measurements. Proc. Natl. Acad. Sci. U.S.A., 113(21), 2016.
[18] P. D. Boyer. The binding change mechanism for ATP synthase - Some probabilities
and possibilities. Biochim. Biophys. Acta, 1140:215–50, 1993.
[19] Y. Sambongi, Y. Iko, M. Tanabe, H. Omote, A. Iwamoto-Kihara, I. Ueda, T. Yanagida,
Y. Wada, and M. Futai. Mechanical rotation of the c subunit oligomer in ATP synthase
(FOF1): direct observation. Science, 286(5445):1722–1724, 1999.
[20] M. Yoshida, E. Muneyuki, and T. Hisabori. ATP synthase–a marvellous rotary engine
of the cell. Nat. Rev. Mol. Cell Biol., 2(9):669–677, 2001.
[21] H. Itoh, A. Takahashi, K. Adachi, H. Noji, R. Yasuda, M. Yoshida, and K. Kinosita.
Mechanically driven ATP synthesis by F1-ATPase. Nature, 427:465–468, 2004.

BIBLIOGRAPHY 67
[22] R. Yasuda, H. Noji, K. Kinosita, and M. Yoshida. F1-ATPase is a highly efficient
molecular motor that rotates with discrete 120 degree steps. Cell, 93(7):1117–1124,
1998.
[23] H. Ueno, T. Suzuki, K. Kinosita, and M. Yoshida. ATP-driven stepwise rotation of
FOF1 -ATP synthase. Proc. Natl. Acad. Sci. U.S.A., 102(5):1333–1338, 2005.
[24] Y. Hirono-Hara, K. Ishizuka, K. Kinosita, M. Yoshida, and H. Noji. Activation of
pausing F1 motor by external force. Proc. Natl. Acad. Sci. U. S. A., 102(12):4288–93,
2005.
[25] K. Shimabukuro, R. Yasuda, E. Muneyuki, K. Y. Hara, K. Kinosita, and M. Yoshida.
Catalysis and rotation of F1 motor: cleavage of ATP at the catalytic site occurs in 1
ms before 40 degree substep rotation. Proc. Natl. Acad. Sci. U. S. A., 100(25):14731–
14736, 2003.
[26] A. Murugan, D. A. Huse, and S. Leibler. Speed, dissipation, and error in kinetic
proofreading. Proc. Natl. Acad. Sci. U. S. A., 109(30):12034–39, 2012.
[27] S. Lahiri, J. Sohl-Dickstein, and S. Ganguli. A universal tradeoff between power , pre-
cision and speed in physical communication. arXiv: cond-mat/07758, 1603.07758:1–
6, 2016.
[28] P. Mehta and D. Schwab. Energetic costs of cellular computation. Proc. Natl. Acad.
Sci. U. S. A., 109(44):17978–82, 2012.
[29] G. Lan, P. Sartori, S. Neumann, V. Sourjik, and Y. Tu. The energy speed accuracy
trade off in sensory adaptation. Nat. Phys., 8(5):422–28, 2012.
[30] N. G. Van Kampen. Stochastic Processes in Physics and Chemistry. North-Holland,
Amsterdam, 3rd ed. edition, 2007.
[31] G. E. Crooks. Excursions in Statistical Dynamics. PhD thesis, University of Califor-
nia at Berkeley, 1999.

BIBLIOGRAPHY 68
[32] A. I. Brown and D. A. Sivak. Effective dissipation: Breaking time-reversal symmetry
in driven microscopic energy transmission. Phys. Rev. E Stat. Nonlin. Soft Matter
Phys., 94(3), 2016.
[33] O. Raz, Y. Subasi, and C. Jarzynski. Mimicking nonequilibrium steady states with
time-periodic driving. Phys. Rev. X, 6(2):1–20, 2016.
[34] P. Salamon and R. S. Berry. Thermodynamic Length and Dissipated Availability.
Phys. Rev. Lett., 51(13):1127–30, 1983.
[35] G. Ai, P. Liu, and H. Ge. Torque-coupled thermodynamic model for FOF1-ATPase.
Phys. Rev. E Stat. Nonlin. Soft Matter Phys., 95(5):052413, 2017.
[36] Lizhong Xu. The coupled chemomechanics of the F1-ATPase molecular motor.
Biochim. Biophys. Acta, 1777(11):1422–31, 2008.
[37] C. Jarzynski. Equalities and Inequalities: Irreversibility and the Second Law of Ther-
modynamics at the Nanoscale. Annu. Rev. Condens. Matter Phys., 2(1):329–351,
2011.
[38] D. A. Sivak and G. E. Crooks. Thermodynamic Metrics and Optimal Paths. Phys.
Rev. Lett., 108(19):190602, 2012.
[39] G. E. Crooks. Nonequilibrium Measurements of Free Energy Differences for Micro-
scopically Reversible Markovian Systems. J. Stat. Phys., 90(5/6):1481–1487, 1998.
[40] G. E. Crooks. The Entropy Production Fluctuation Theorem and the Nonequilibrium
Work Relation for Free Energy Differences. Phys. Rev. E., 1(3):1–7, 1999.
[41] C. Jarzynski. Nonequilibrium Equality for Free Energy Differences. Phys. Rev. Lett.,
78(14):2690–2693, 1997.
[42] E. H. Feng and G. E. Crooks. Length of time’s arrow. Phys. Rev. Lett., 101(9):1–4,
2008.
[43] O. Mazonka and C. Jarzynski. Exactly solvable model illustrating far-from-
equilibrium predictions. arXiv: cond-mat/9912121., 1999.

BIBLIOGRAPHY 69
[44] T. Schmiedl and U. Seifert. Optimal finite-time processes in stochastic thermodynam-
ics. Phys. Rev. Lett., 98(10):1–4, 2007.
[45] E. Aurell, C. Mejia-Monasterio, and P. Muratore-Ginanneschi. Optimal protocols and
optimal transport in stochastic thermodynamics. Phys. Rev. Lett., 106(25):1–4, 2011.
[46] P. R. Zulkowski and M. R. Deweese. Optimal control of overdamped systems. Phys.
Rev. E, 032117(92):1–9, 2015.
[47] A. C. Barato and U. Seifert. Thermodynamic Uncertainty Relation for Biomolecular
Processes. Phys. Rev. Lett., 114(15):1–5, 2015.
[48] F. Weinhold. Metric geometry of equilibrium thermodynamics. J. Chem. Phys.,
63(6):2479–2483, 1975.
[49] J. Nulton, P. Salamon, B. Andresen, and Qi Anmin. Quasistatic processes as step
equilibrations. J. Chem. Phys., 83(1):334–338, 1985.
[50] D. A. Sivak and G. E. Crooks. Thermodynamic geometry of minimum-dissipation
driven barrier crossing. Phys. Rev. E, 94(5):052106, 2016.
[51] P. R. Zulkowski, D. A. Sivak, G. E. Crooks, and M. R. DeWeese. The geometry of
thermodynamic control. Phys. Rev. E, 86(1):1–8, 2012.
[52] P. R. Zulkowski, D. A. Sivak, and M. R. DeWeese. Optimal control of transitions
between nonequilibrium steady states. PLoS One, 8(12):1–7, 2013.
[53] P. D. Boyer. The ATP synthase–a splendid molecular machine. Annu. Rev. Biochem.,
66:717–49, 1997.
[54] H. Wang and G. Oster. Energy transduction in the F1 motor of ATP synthase. Nature,
396(6708):279–282, 1998.
[55] Y. Ito and M. Ikeguchi. Mechanism of the ab Conformational Change in F1-ATPase
after ATP Hydrolysis: Free-Energy Simulations. Biophys. J., 108(1):85–97, 2015.

BIBLIOGRAPHY 70
[56] S. Mukherjee and A. Warshel. Electrostatic origin of the mechanochemical rotary
mechanism and the catalytic dwell of F1-ATPase. Proc. Natl. Acad. Sci., 108:20550–
5, 2011.
[57] George Oster, Jung-chi Liao, and Jianhua Xing. Making ATP. Proc. Natl. Acad. Sci.
U.S.A., 102(46):16539–16546, 2005.
[58] H. Risken. The Fokker-Planck Equation. Springer-Verlag, Berlin, 2nd edition, 1989.
[59] W. Press, S. Teukolsky, W. Vetterling, and B. Flannery. Numerical Recipes: The Art of
Scientific Computing. Cambridge University Press, New York, 3rd ed. edition, 2007.

Appendices
71

Appendix A
Quadratic Approximations
The sinusoidal driving potential in Equation 3.2 can be approximated as a quadratic poten-
tial though Taylor expansion around θ = 0:
U(θ , t) =k2
(1+ sin
[θ − π
2−θ0
])
=12
k(1− cos(θ −θ0))
≈ k sin2(
θ0
2
)− 1
2θk sin(θ0)+
14
kθ2 cos(θ0)+O(x3) .
(A.1)
Noting that the first two terms are 0 and cos(θ0) = 1 when θ0 = 0, and matching the
quadratic term with the form of a quadratic potential yields
14
kθ2 =
12
k′θ 2 , (A.2)
where k′ is the spring constant of the quadratic approximation. Therefore k′ = k/2: our
model’s driving potential corresponds to a quadratic potential with a trap stiffness of k/2.
The sinusoidal intrinsic potential in Equation 3.1 can also be approximated by a quadratic
potential through Taylor expansion around θ = 0:
Uintrinsic(θ) =A2
(1+ sin
[3(
θ +π
2
)])
≈ 9Aθ 2
4+O(x4) ,
(A.3)
and again matching the quadratic term with the form of a quadratic potential yields
94
Aθ2 =
12
A′θ 2 , (A.4)
72

APPENDIX A. QUADRATIC APPROXIMATIONS 73
where A′ is the spring constant of the quadratic approximation. Therefore A′ = 2A/9:
each well in our model’s intrinsic potential corresponds to a quadratic potential with a trap
stiffness of 2A/9.