Embed Size (px)
Citation preview

Shaikh Faruque AliAssistant Professor
Department of Applied Mechanics
Indian Institute of Technology Madras
Chennai 600 036, India
e-mail: [email protected]
Sondipon Adhikari1Professor
Member of ASME
Chair of Aerospace Engineering
College of Engineering
Swansea University Singleton Park,
Swansea SA2 8PP, United Kingdom
e-mail: [email protected]
Energy Harvesting DynamicVibration AbsorbersEnergy harvesting is a promise to harvest unwanted vibrations from a host structure.Similarly, a dynamic vibration absorber is proved to be a very simple and effectivevibration suppression device, with many practical implementations in civil and mechani-cal engineering. This paper analyzes the prospect of using a vibration absorber for pos-sible energy harvesting. To achieve this goal, a vibration absorber is supplemented witha piezoelectric stack for both vibration confinement and energy harvesting. It is assumedthat the original structure is sensitive to vibrations and that the absorber is the elementwhere the vibration energy is confined, which in turn is harvested by means of a piezo-electric stack. The primary goal is to control the vibration of the host structure and thesecondary goal is to harvest energy out of the dynamic vibration absorber at the sametime. Approximate fixed-point theory is used to find a closed form expression for optimalfrequency ratio of the vibration absorber. The changes in the optimal parameters of thevibration absorber due to the addition of the energy harvesting electrical circuit arederived. It is shown that with a proper choice of harvester parameters a broadbandenergy harvesting can be obtained combined with vibration reduction in the primarystructure. [DOI: 10.1115/1.4007967]
1 Introduction
The last decade has witnessed many developments in the areaof smart structures. Sensors and actuators coupled with a control-ler that are able to measure and control the dynamic response ofstructures are designed and deployed for structural health monitor-ing purposes [1]. The design of control systems has been switchedfrom passive to active, and then to semiactive and hybrid semi-active systems to design efficient and less power demandingsystems. One problem that engineers still face is to deploy, main-tain, and to power up the sensor and actuator nodes especially inlocations that are far reaching and inaccessible. Self-powered orenergy autonomous sensors that scavenge energy from the vibra-tion of the host structure seem to be a better alternative to thebattery powered sensor nodes.
Many studies are reported in the literature about self-poweredor energy autonomous devices, also known as energy harvestingdevices, for sensor nodes [2–6]. Most energy harvesting techni-ques investigated and implemented for structural health monitor-ing are based on solar energy, thermal gradients, and/or vibrationenergy. Various concepts of vibration energy harvesting havebeen proposed [2–5,7–10]. The two main vibration based energyharvesting technologies are electromagnetic and piezoelectric.The electromagnetic harvester generates power from the motionof a coil due to host vibration in a magnetic field [11–13]. Piezo-electric energy harvesters generate power from the strain in piezo-electric materials in response to external mechanical vibrations[14–16]. The advantages of piezoelectric devices include smallsize, fewer moving parts, and a simpler design. A significant num-ber of studies developed accurate models and discussed in greatdetail the fundamentals of piezoelectric materials and their usageto harvest energy. These studies include the works of Sodanoet al. [17], Shahruz [3], Stephen [18], Ng and Liao [19], Cornwellet al. [20], Lefeuvre et al. [8], Beeby et al. [21], Williams andYates [11], and Anton and Sodano [5].
Studies reported above focus on the power scavenging effi-ciency of harvesters. From the application point of view, the mainfocus has been at structural health monitoring or sensor design ofthese devices. Research on energy harvesting devices that can be
augmented with vibration control are less reported [22–25]. Mostnotably because when we reduce the vibration of the structure wereduce the power that can be scavenged from it. One needs to finda tradeoff between the vibration reduction and the power har-vested. A suitable choice would be a dynamic vibration absorber(DVA), also known as tuned mass dampers (TMDs). This deviceis used to shift vibrations from the primary structure to the sec-ondary structure (a DVA). The secondary structure then vibratesand releases the energy input to the primary structure. For furtherdetails about dynamic vibration absorbers, see for example thebook by Den Hartog [26].
Since the vibration energy is effectively localized to a DVA,energy can be scavenged from the DVA instead of the primarystructure. This way the “energy harvesting DVA” can be used tosimultaneously control and harvest vibration energy of a hoststructure. Currently DVA is used for passive vibration control inengineering structures such as tall buildings and large flexiblebridges due to earthquake or wind excitations. An energy harvest-ing DVA will give the added benefit of harvesting that energy.Energy scavenged in this way can be used to power wireless sen-sors or other low-power devices. For example, in the event of apower failure during an earthquake, wireless sensors can be pow-ered by harvested vibration energy. Following these discussions,the current study is concerned with the confinement and harvest-ing of vibrations in structures by adding a vibration absorber anda piezoelectric element. The proposed design aims at transferringthe vibration energy from the structure to the absorbers and con-fining it into stack piezoelectric elements.
2 Energy Harvesting Dynamic Vibration Absorber
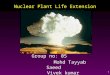
A schematic diagram of the proposed energy harvestingdynamic vibration harvester (EHDVA) is shown in Fig. 1. This isa coupled two degree of freedom electromechanical system within general nonproportional damping [27,28]. The primary mass(m0) whose vibrations has to be reduced is augmented with theDVA (mass mh). The DVA consists of a spring, a damping, and apiezoelectric element to harvest energy. The piezoelectric elementis attached to the electric circuit as shown in Fig. 1.
2.1 Dynamic Vibration Absorber and the Fixed-PointTheory. A dynamic vibration absorber is a widely used passivevibration control device. When a primary system is subjected to a
1Corresponding author.Contributed by the Energy Division of ASME for publication in the JOURNAL OF
APPLIED MECHANICS. Manuscript received August 3, 2011; final manuscript receivedOctober 18, 2012; accepted manuscript posted October 30, 2012; published onlineMay 16, 2013. Assoc. Editor: Alexander F. Vakakis.
Journal of Applied Mechanics JULY 2013, Vol. 80 / 041004-1Copyright VC 2013 by ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

harmonic excitation at a constant frequency, its steady-stateresponse can be suppressed by attaching a secondary mass-springsystem or DVA. However, a DVA consisting of only a mass and aspring has a narrow operation region and its performance deterio-rates significantly when the exciting frequency varies. The per-formance robustness can be improved by using a damped DVA.The key design parameters of a damped DVA are its tuning pa-rameter (also known as the frequency ratio) and the dampingratio.
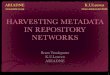
The first mathematical theory on the damped DVA was pre-sented by Ormondroyd and Den Hartog [29]. Den Hartog [26] firstfound the optimum solution of a damped DVA that is attached toa damping-free primary system. His study utilized the novel ideaof “fixed-point” frequencies, that is, the frequencies at which theresponse amplitudes of the primary mass are independent of theabsorber damping. The theory states the existence of two fixedpoints P and Q in the frequency response curves of the displace-ment of the primary structure. The points P and Q are independentof the damping in the absorber as shown in Fig. 2(a). This reducesthe optimization parameters only to the frequency ratio. Based onthe fixed-point theory, Den Hartog found the optimum tuning pa-rameter and defined the optimality for the optimum absorberdamping.
As shown in Fig. 2(b), when a primary system is damped, theusefulness of the fixed-points feature is no longer strictly valid.Thus, obtaining an exact closed-form solution for the optimumtuning parameter or optimum damping ratio becomes very diffi-cult. A number of studies have focused on the approximate andnumerical solutions. These include numerical optimizationschemes proposed by Randall et al. [30,31], nonlinear program-ming techniques by Liu and Coppola [32], frequency locusmethod by Thompson [33], and min-max Chebyshev’s criterionby Pennestri [34] to name a few. Numerical studies based on mini-max optimization are reported in [24,35]. In spite of being exact,these analyses are usually problem specific and may not givephysical insights to the phenomenon for the general case.
Ghosh and Basu [36] identified that for small damping in theprimary system, although there exist no points like P and Q in astrict sense, the fixed-point theory can be applied. Ghosh andBasu [36] derived an approximate analytical solution for the opti-mum tuning parameter based on the assumption that the fixed-points theory also approximately holds when a damped DVA isattached to a lightly or moderately damped primary system (seeFig. 2(b)). Motivated by this, we develop a fixed-point theory forthe coupled electromechanical system. We aim to provide an ana-
lytical derivation of the power harvested by an energy harvestingDVA. The optimal DVA parameters which reduce the primarystructure vibrations as well as harvest maximum power will begiven.
2.2 Dynamic Vibration Absorber With EnergyHarvesting. The primary structure is assumed to be a singledegree of freedom system as shown in Fig. 1. The mass, stiffness,and the damping of the primary structure are represented by m0,k0, and c0, respectively, whereas the energy harvesting DVA hasan equivalent mass, equivalent stiffness, and damping as mh, kh,and ch, respectively. The electrical capacitance and resistance aredenoted by Cp and Rl, respectively. The variable h is the couplingbetween the electrical and mechanical parts of the harvester. Thedynamics of the primary mass (m0), the absorber mass (mh), andvoltage flow can be expressed by three coupled ordinary differen-tial equations as
m0€x0 þ c0 _x0 þ k0x0 � khðxh � x0Þ � chð _xh � _x0Þ ¼ F0eixt (1)
mh€xh þ chð _xh � _x0Þ þ khðxh � x0Þ � hv ¼ 0 (2)
Cp _vþ v
Rlþ h _xh ¼ 0 (3)
Fig. 1 Schematic diagram of the energy harvesting dynamicvibration absorber attached to a single degree of freedomvibrating system
Fig. 2 Frequency response of the primary mass in a classicaldynamic vibration absorber for mass ratio l 5 0.1 at optimalfrequency ratio b ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1=ð1þ lÞ
p. (a) Without any damping in
primary structure and (b) with primary structure damping. fh inthe figures represents the damping ratio in the absorber.
041004-2 / Vol. 80, JULY 2013 Transactions of the ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

where x0 and xh are the displacement of the primary mass andabsorber mass, respectively. The voltage across the load resistor isdenoted by v. The electromechanical coupling and the mechanicalforce are modeled as proportional to the voltage across the piezo-ceramic in Eq. (2). Equation (3) is obtained from the electrical cir-cuit, where the voltage across the load resistance arises from themechanical strain through the electromechanical coupling, and thecapacitance of the piezoceramic Cp. The primary structure isassumed to be driven by a harmonic excitation with amplitude F0.
The steady state solution of Eqs. (1)–(3) can be written as
x0 ¼ X0eixt; xh ¼ Xheixt; and v ¼ Veixt (4)
Substituting Eq. (4) into Eqs. (1)–(3) and then normalizing withrespect to the resonance frequency of the primary massx0 ¼
ffiffiffiffiffiffiffiffiffiffiffiffik0=m0
p, we get
�X2 þ 2ðf0 þ fhlbÞiXþ ð1þ lb2Þ� �
X0 � lð2fhbiXþ b2ÞXh
¼ F0=k0
(5)
� ð2fhbiXþ b2ÞX0 þ �X2 þ 2fhbiXþ b2� �
Xh �hkh
b2V ¼ 0
(6)
haCp
iXXh þ ðbþ aiXÞV ¼ 0 (7)
Here l ¼ mh=m0 is the ratio of the absorber mass to theprimary mass, known as mass ratio, b ¼ xh=x0 is the ratio of the
decoupled absorber frequency to the natural frequency of theprimary structure, known as frequency ratio, X ¼ x=x0 isthe nondimensional frequency of excitation, and a ¼ xnCpRl isthe dimensionless time constant. The coefficient of dampingin the primary structure is given by f0 ¼ c0=ð2m0x0Þ,whereas fh ¼ ch=ð2mhxhÞ is the damping coefficient of theabsorber.
Solving Eqs. (5)–(7) for the displacement amplitudes X0 andXh, and for the voltage amplitude V, we get
X0
F0=k0
�������� ¼ a00
þ a02iXð Þ2
h i2
þ a01iXð Þ þ a03
iXð Þ3h i2
Dj j2(8)
Xh
F0=k0
�������� ¼ � ah0
þ ah2iXð Þ2
h i2
þ ah1iXð Þ½ �2
Dj j2(9)
V
F0=k0
�������� ¼ av0
þ av2iXð Þ2
h i2
þ av1iXð Þ½ �2
Dj j2(10)
Note that Eqs. (8)–(10) are normalized with respect to the staticdisplacement of the primary structure (F0/k0) to make the expres-sions on the right-hand side independent of the excitation ampli-tude. The denominator is given as
D ¼ b0 þ b1 iXð Þ þ b2 iXð Þ2þb3 iXð Þ3þb4 iXð Þ4þb5 iXð Þ5 (11)
The coefficients appearing in Eqs. (8)–(11) are given by
a00¼ b3; a01
¼ aþ 2fh þ aj2ð Þb2; a02¼ 2fhaþ 1ð Þb; a03
¼ a;
ah0¼ b3; ah1
¼ aþ 2fhð Þb2; ah2¼ 2fhabð Þ;
av0¼ 0; av1
¼ � haCp
b2; av2¼ � 2fhha
Cpb
and
b0 ¼ b3
b1 ¼ b4aj2lþ 2b3f0 þ aþ 2fh þ aj2� �
b2
b2 ¼ 2aj2fhlþ 1þ l� �
b3 þ 2aj2f0 þ 2af0 þ 4fhf0
� �b2
þ 2fhaþ 1ð Þbb3 ¼ aþ aj2 þ alþ 2fhlþ 2fh
� �b2 þ 2f0 þ 4afhf0ð Þbþ a
b4 ¼ 2fhlþ 2fhð Þaþ 1½ �bþ 2af0
b5 ¼ a
where j2 ¼ h2=ðkhCpÞ is the nondimensional time constant for theelectrical part.
The objective is to reduce the vibration of the primary mass(minimize X0 / (F0 / k0)) and simultaneously scavenge as muchenergy as possible (maximize V / (F0 / k0)) from it using thepiezoelectric harvester. Straightforward optimization of a costfunction containing both terms will result in solving a tenthorder polynomial in X. A brute-force numerical optimizationapproach is certainly possible, but may not give desirable physi-cal insights. An alternative route would be to follow a slightlydifferent approach as pioneered by Den Hartog [26,29], Ghoshand Basu [36], and Liu and Coppola [32]. The additional com-plexity in the analysis reported in this paper compared to theresults from the above references is due to the addition ofEq. (3) to the DVA system.
3 Development of the Fixed-Point Theory
For the development of the fixed-point theory we assume that theprimary system parameters like m0, k0, and c0 are known. We need tofind the optimal mechanical parameters for the secondary system thatare kh and fh and the electrical parameters like a and j when the massratio l is given. Theoretically, even when we put f0¼ 0 in Eq. (8),the fixed-point theory does not hold due to the coupling with Eq. (3).But for all practical purposes and for small values of j, although thereexist no points like P and Q, the fixed-point theory can be appliedapproximately as has been shown by Ghosh and Basu [36].
The frequency response curves of the primary structure displace-ment with EHDVA for various combinations of l, j2, and a areshown in Figs. 3(a)–3(d). The range of nondimensional coefficientj2 is taken up to 0.4. Note that this value is quite high for energyharvesting systems as the optimal value usually lies between 0.1and 0.2 [15,16]. The nature of curves for different j2 values and avalues are shown in Fig. 3. It can be observed from these figuresthat for low mass ratio, for different values of nondimensional cou-pling coefficient and nondimensional time constants, the frequencycurves roughly pass through two fixed points similar to the classi-cal case considered by Den Hartog [26,29]. We therefore use thefixed-point theory to simplify further analysis. We also assume thatthe damping in the primary mass is negligible as most structureshave very little inherent damping. Substituting f0¼ 0, from Eq. (8)one obtains the response of the primary mass as
X0
F0=k0
�������� ¼ a0f þ a1f fh þ a2f f
2h
b0f þ b1f fh þ b2f f2h
(12)
Journal of Applied Mechanics JULY 2013, Vol. 80 / 041004-3
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

where
a0f ¼ a2X6 þ �2b2a2 þ b2 � 2b2a2j2� �
X4 þ �2b4 þ b4a2 þ 2b4a2j2 þ b4a2j4� �
X2 þ b6
a1f ¼ 4b4aj2X2; a2f ¼ 4 X2a2 þ b2� �
b2X2
b0f ¼ a2X10 þ �2b2a2 � 2b2a2l� 2a2 � 2b2a2j2 þ b2� �
X8 þ�2b4lþ 4b4a2j2lþ 2b4a2j2 � 2b4 � 2b2þa2þ4b2a2j2
þb4a2 þ b4a2j4 þ b4a2l2þ4b2a2 þ 2b2a2lþ2b4a2l
!X6
þ
�4b4a2j2l� 2b4a2j4 þ b6þ4b4þb2 � 2b2a2j2 � 2b6a2j2l2
þb6l2 þ 2b6l� 2b2a2 � 2b4a2 � 2b4a2lþ2b4l� 4b4a2j2
�2b6a2j4l� 2b6a2j2l
0BB@
1CCAX4
þb4a2 þ b8a2j4l2 � 2b4þ2b4a2j2
þ2b6a2j2lþ 2b6a2j4l� 2b6 � 2b6lþb4a2j4
!X2 þ b6
b1f ¼ 4b4X2aj2 � 8b4aj2X4 þ 4b4aj2X6
b2f ¼ 4b2a2 þ 8b2a2lþ 4b2a2l2� �
X8 þ �8b4a2j2l� 8b4a2j2l2 � 8b2a2þ4b4 � 8b2a2lþ 4b4l2 þ 8b4l� �
X6
� �8b4 � 8b4lþ 4b2a2 þ 4b6a2j4l2 þ 8b4a2j2l� �
X4 þ 4b4X2
In classical DVA the fixed points P and Q are independent ofDVA damping. Therefore any damping values can be consideredfor analysis. Let us substitute fh¼ 0 and fh¼1 in Eq. (12). Wehave
limfh!0
X0
F0=k0
�������� ¼ a0f
b0f
(13)
Fig. 3 Frequency response of the displacement of the primary mass with the energy harvestingvibration absorber for different mass ratio and electrical coefficients and with optimal frequencyratio (Eq. (24)), absorber damping fh 5 0.01, and undamped primary structure
041004-4 / Vol. 80, JULY 2013 Transactions of the ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

and
limfh!1
X0
F0=k0
�������� ¼ a2f
b2f
(14)
Since the fixed points are independent of damping, equating Eqs.(13) and (14) and then rewriting them in terms of j, we get
a0j þ a2jj2 þ a4jj
4 ¼ 0 (15)
where
a0j ¼X2 b2þa2X2� �2
2þlð ÞX4� 2 1þlð Þb2þ1� �
X2þ2b2�
a2j ¼�2b2a2X2 b2þa2X� � 2lþ3ð ÞX4� 2þ3lð Þb2þ3
� �X2
þ2b2
8<:
9=;
a4j ¼2b4a23 1þlð Þa2X6þ 1þlð Þ� 1þ3lð Þa2½ �b2�3a2
� X4
þ 1�lð Þb4þ a2�1ð Þb2� �
X2þb4
8<:
9=;
(16)
Equation (15) with coefficients given by Eqs. (16) represents athird-order polynomial in X2. A simple analytical solution for X ishard to obtain. We can approximate the above function by assum-ing j2 to be small. Neglecting the fourth and higher order terms inj, Eq. (15) reduces to
2þ lð ÞX4 � 2 1þ lð Þb2 þ 1� �
X2 þ 2b2 ¼ 0 (17)
Equation (17) is obtained for the undamped primary system withonly an absorber and no harvester circuit attached to it. Solutionof Eq. (17) gives same values for XP and XQ as Den Hartog’s so-lution in [26] and the same expression in X is reported in [36].
4 Optimal Mechanical Parameters
4.1 Optimal Tuning Parameter. Once the fixed-points fre-quencies are determined, the nest task is to optimize b. The opti-mum tuning ratio b is the one for which the values ofX0=F0=k0½ �X¼XP
equals X0=F0=k0½ �X¼XQfor all possible choices of
fh [26,36]. Substituting X¼XP and X¼XQ separately in Eq. (12)and then equating the resulting expressions, we get
a0f þ a1f fh þ a2f f2h
b0f þ b1f fh þ b2f f2h
" #X¼XP
¼a0f þ a1f fh þ a2f f
2h
b0f þ b1f fh þ b2f f2h
" #X¼XQ
(18)
When fh !1 in Eq. (18) we obtain
a2f
b2f
�X¼XP
¼a2f
b2f
�X¼XQ
(19)
Substituting Eq. (20) derived from Eqs. (17) to (19),
X2P þ X2
Q ¼2 1þ lð Þb2 þ 2
2þ l
X2PX2
Q ¼2b2
2þ l
(20)
we get a polynomial in b as
a0b þ a2bb2 þ a4bb
4 ¼ 0 (21)
The coefficients appearing in this polynomial are given as
a0b ¼ 2a2 a2 þ 1� �
lþ 1ð Þa2b ¼ �2 1� j2
� �l3 þ 3 1� j2
� �l2 þ 3� 2j2
� �lþ 1
� �a4
� 2� j2� �
l3 þ 2 2� j2� �
l2 þ 2l� �
a2 þ 1þ lð Þ 2þ lð Þ
a4b ¼ �12
2� j2ð Þ2l4 þ 2 2� j2ð Þ2l3
þ2 3� j2ð Þ 2� j2ð Þl2 þ 4 2� j2ð Þlþ 2
( )
a2 � 1þ lð Þ3 2þ lð Þ(22)
One can solve Eq. (21) for various parametric values and can findoptimal frequency ratio b. The general solution is given as
b2 ¼�a2b 6
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia2
2b� 4a4b a0b
q2a4b
(23)
Analysis of coefficients a0b , a2b , and a4b in Eq. (22) will revealthat a0b � 0 and a4b � 0 for all values of 0 � j2 < 2, and for allpositive values of a and l. Therefore for a real, positive optimalvalue of b we have
b2 ¼�a2b �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia2
2b� 4a4b a0b
q2a4b
(24)
Substituting a¼ 0 in Eq. (21) we get
� 1þ lð Þ2b4 þ b2 ¼ 0 (25)
Equation (25) gives the Den Hartog [26] solution of either b¼ 1/(1þ l) or b¼ 0. b¼ 1/(1þl) provides an optimal solution for asimple DVA mounted on an undamped structure, whereas the sec-ond solution b¼ 0 represents the trivial case for a static system.Equation (24) can be viewed as the generalization of the solutionsfor classical DVA to energy harvesting DVA and one of the keyfindings in this paper. Solution to Eq. (24) is shown in Fig. 4 fordifferent values of j2 and a. Den Hartog’s solution can beretrieved when a¼ 0 and j2¼ 0. Once the natural frequency ofthe primary system is known, this curve can provide the details
Fig. 4 Optimal values of ratio of decoupled natural frequen-cies (b) for various values of a and j2. Optimal values of the fre-quency ratio seems to be a linear function of the square of thenondimensional coupling coefficient. This is from the approxi-mation that neglects higher order in j2.
Journal of Applied Mechanics JULY 2013, Vol. 80 / 041004-5
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

for the natural frequency of the DVA for different values of thenondimensional harvester parameters (a and j2).
4.2 Optimal Damping Factor. There are two ways to findthe optimal damping for the absorber. Den Hartog [26] reportedthat the optimal fh is the one for which the amplitude curve passeshorizontally through the points P and Q. The idea is to take the de-rivative of the expression in Eq. (12) with respect to X. Then sub-stitute the value of XP from Eq. (17) into the resulting expressionand equate it to zero. This analysis provides two different optimalvalues for DVA damping. One can take an average of the two toget the optimal damping.
Another technique is based on the assumption that at optimaldamping the frequency response curve of X0=X0;s will be parallel
to the frequency axis between the fixed points and therefore willhave the same amplitude between these points. The idea is toequate the amplitudes at either point P or Q with the amplitude ata frequency which represents a rigid connection between theDVA and the primary structure, i.e., x1 ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffik0=ðm0 þ mhÞ
p.
We follow the later method. Figure 5 shows the optimal damp-ing fh as against the nondimensional time constant a and the non-dimensional coupling coefficient j2. An increase in the values ofa and j2 decreases the values of optimal fh, i.e., with the additionof the harvesting circuit the overall damping in the DVA isincreased. This decreases the high damping requirement for opti-mal performance. The optimal fh values sharply decrease to zero.We have pointed out that the fixed-point theory is applicable forsmall values of a and j2. For higher values of a and j2, the analy-sis may not provide a real solution to the optimal fh value.
5 Optimal Electrical Parameter and Harvested Power
In this section we consider the response of the primary systemand energy harvested from the secondary system. The power har-vested from the energy harvesting DVA is given by [15,37]
P ¼ jVj2
Rl¼ jVj
2
aCpxh (26)
The harvester resistance is assumed to be fixed in Eq. (26) andtherefore the power depends only on the square of the voltage.Figure 6 shows the frequency response curves of the primarymass displacement (Figs. 6(a) and 6(b)) against a and j2. Thequalitative nature of the curves are similar. At low values of athere exists two peaks but these two peaks dissolve into one as thevalue of a increases. This implies that with the increase in the val-ues of the electrical parameters, the system effectively behaves asa single-degree-of-freedom system and the relative motionbetween the masses decreases. A close observation of Figs. 6(a)
Fig. 6 Frequency response curves of the primary structure (a) and (b) normalized displace-ment and (c) and (d) normalized power for various values of nondimensional time constant aand nondimensional coupling coefficient j2 for mass ratio l 5 0.1, optimal frequency ratio b andharvester damping as fh 5 0.1. The responses are normalized with respect to static displace-ment of the primary structure F0 / k0 5 X0,s.
Fig. 5 Optimal damping of the EHDVA (fh) for various values ofa and j2
041004-6 / Vol. 80, JULY 2013 Transactions of the ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

and 6(b) shows that there exist values for a and j2 for which thecurve attains a minimum.
Frequency response curves of the harvested power against aand j2 are shown in Figs. 6(c) and 6(d), respectively. Equation(26) is used to plot the power harvested, where Eq. (10) is used tocalculate |V|2. The power plots are normalized with respect to thesquare of the static displacement of the primary structure(X0,s¼F0 / k0). As discussed before the power curves are bimodalat low a and j2 values. At higher values the power curves areunimodal. This gives us a chance to decide the optimal values ofthe electrical parameters from the frequency response curves.Since at lower values of the electrical parameters, the energy har-vesting DVA has a bimodal frequency response, this could beused for broadband energy harvesting.
Figure 7 shows the maximum of the normalized displacementresponse of the primary structure for various values of a and j2. Itis evident from the figure that there exist different values for a andj2 for which the peak displacement amplitude of the primarystructure is minimum over the region. The maximum response ini-tially decreases with the increase in the values of electrical param-eters and then again increases with them. The reason is for smallvalues of the electrical parameters, the primary system has twopeaks and then after certain values of the nondimensional parame-ters the system becomes unimodal and the peak responseincreases.
The optimal electrical parameters are found based on the mini-mum displacement of the primary mass. The values of a and j2
corresponding to the minimum value of the primary structure
response provide a relationship between the two nondimensionalparameters for the energy harvesting DVA. This gives the de-signer a wide range of values to select from. Note that values ofnondimensional electrical parameters beyond these values willresult in a single mode of vibration of the structure. Figure 7(b)shows the pairwise values of electrical parameters for which pri-mary structure displacement attains the minimum. A fourth orderpolynomial curve (the dark line) is obtained numerically. It is tobe noted that the position of this curve changes with the change inmass ratio l.
The relation in Fig. 7(b) is used to generate several pairs ofnondimensional optimal electrical coefficients for which the pri-mary structure has minimum displacement. These values thereforecorrespond to the most effective vibration control of the primarystructure. These pairs of electrical coefficients are then used togenerate curves for the frequency responses of the primary struc-ture displacements (Fig. 8(a)) and for the power curves (Fig.8(b)). For Figs. 8(a) and 8(b), the secondary structure damping isconsidered fh¼ 0.1. Note that in case of classical DVA the opti-mal value of damping fh is 0.23 for mass ratio l¼ 0.1. As dis-cussed before the single mode response curves is for thenondimensional time constant a¼ 0.50, which is outside the curvein Fig. 7(b). The value of the nondimensional time constant forwhich the peak primary structure response is a minimum is 0.65.Figures 8(a) and 8(b) provide a tradeoff to choose the optimalnondimensional electrical parameters. Clearly a¼ 0.65 shows aminimum value for the bimodal frequency response (as shown inFig. 8), the best choice of nondimensional time constant a would
Fig. 7 (a) Peak normalized primary structure displacement for different values of nondimen-sional time constant (a) and nondimensional coupling coefficient with mass ratio l 5 0.1, damp-ing fh 5 0.1, and optimal frequency ratio. (b) Numerically obtained from (a) and polynomial fit ofnondimensional electrical parameters (a and j2).
Fig. 8 Frequency response curves of (a) normalized primary structure displacement and (b)normalized power (in mW/m2) for mass ratio l 5 0.1, damping fh 5 0.1, and optimal frequencyratio. The nondimensional coupling coefficient j2 are chosen based on curve in Fig. 7(b) fornondimensional time constants given in the figures.
Journal of Applied Mechanics JULY 2013, Vol. 80 / 041004-7
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

be 0.55. For a nondimensional time constant a¼ 0.55 the ampli-tude of the frequency response of the primary structure displace-ment is almost the same as for a¼ 0.65 but a¼ 0.55 providesbetter power scavenging (see Fig. 8(b)). The curves in Fig. 8 arefor normalized values and therefore true tradeoff is expected withactual variables and designer choice. In such a case the curve inFig. 7(b) will become useful as it limits the choice of possiblenondimensional electrical parameters.
A comparison of the classical DVA and the energy harvestingDVA is shown in Fig. 9. The frequency response curves for theprimary structure displacement with nondimensional couplingcoefficient j2¼ 0. It is clear that for the same damping in the sec-ondary structure fh¼ 0.1, energy harvesting DVA provides bettercontrol to that of classical DVA without energy harvesting capa-bility. Classical DVA with optimal damping fh¼ 0.23 is alsoshown in Fig. 9. The frequency response curves for DVA withoptimal damping and energy harvesting DVA with lesser dampinghave the same amplitude. This shows that the optimal dampingrequirement is reduced for a DVA if energy harvesting capabilityis added.
6 Conclusions
This article proposed the idea of a dynamic vibration absorberas an energy harvesting system. The aim is to reduce the vibrationof a primary structure and simultaneously harvest energy from thevibration of an attached vibration absorber. A frequency domainmethod is proposed for the analysis and design of the coupledelectromechanical system. A closed form expression for the opti-mal nondimensional frequency ratio of the decoupled system isderived. A detailed analysis of the damping of the EHDVA, non-dimensional coupling coefficient, and nondimensional time con-stant are carried out. The main points arising from the presentanalysis are the following.
1. Unlike the classical DVA, energy harvesting DVA does nothave any fixed points but it is shown that the fixed-pointtheory is approximately applicable for small values of elec-trical parameters.
2. A closed form explicit expression for the frequency ratio (b)is obtained as a function of the mass ratio l, nondimensionaltime constant a, and nondimensional coupling coefficient j2.The expression can be further reduced to a function of l anda with the help of some numerical analysis.
3. There exist a relation between the nondimensional electricalparameters that minimizes the primary structure vibrations.
This relation changes with change in the mass ratio of theDVA.
4. The power scavenged by the harvester has a double peak fre-quency curve, which can used for broadband energy harvest-ing with a proper choice of parameters.
5. The addition of energy harvesting capacity of the DVAreduces the high damping requirement of the absorber foroptimal performance.
Future work will include experimental demonstration of theproposed idea. Furthermore, the analytical work can be extendedto active DVA (active tuned mass dampers) where the powerrequired for the active control can be supplied by the harvestedpower.
Acknowledgment
S.F.A. and S.A. acknowledge the support of the Royal Societythrough the award of the Newton International Fellowship andWolfson Research Merit award, respectively.
References[1] Ali, S. F., and Ramaswamy, A., 2009, “Testing and Modeling of MR Damper
and its Application to MDOF Systems Using Integral BacksteppingTechnique,” ASME J. Dyn. Syst. Meas. Control, 131(2), p. 021009.
[2] Sodano, H. A., Inman, D. J., and Park, G., 2004, “A Review of Power Harvest-ing From Vibration Using Piezoelectric Materials,” Shock Vib. Dig., 36(3), pp.197–205.
[3] Priya, S., 2007, “Advances in Energy Harvesting Using Low Profile Piezoelec-tric Transducers,” J. Electroceram., 19(1), pp. 167–184.
[4] Beeby, S. P., Tudor, M. J., and White, N. M., 2006, “Energy Harvesting Vibra-tion Sources for Microsystems Applications,” Meas. Sci. Technol., 17(12), pp.175–195.
[5] Anton, S. R., and Sodano, H. A., 2007, “A Review of Power Harvesting UsingPiezoelectric Materials (2003–2006),” Smart Mater. Struct., 16(3), pp. R1–R21.
[6] Ali, S. F., Adhikari, S., Friswell, M. I., and Narayanan, S., 2011, “The Analysisof Piezomagnetoelastic Energy Harvesters Under Broadband RandomExcitations,” J. Appl. Phys., 109(7), p. 074904.
[7] Lefeuvre, E., Badel, A., Benayad, A., Lebrun, L., Richard, C., and Guyomar,D., 2005, “A Comparison Between Several Approaches of Piezoelectric EnergyHarvesting,” J. Phys. IV, 128, pp. 177–186.
[8] Lefeuvre, E., Badel, A., Richard, C., Petit, L., and Guyomar, D., 2006, “A Com-parison Between Several Vibration-Powered Piezoelectric Generators forStandalone Systems,” Sensors Actuators A Phys., 126(2), pp. 405–416.
[9] Erturk, A., Hoffmann, J., and Inman, D. J., 2009, “A PiezomagnetoelasticStructure for Broadband Vibration Energy Harvesting,” Appl. Phys. Lett.,94(25), p. 254102.
[10] Litak, G., Friswell, M. I., and Adhikari, S., 2010, “Magnetopiezoelastic EnergyHarvesting Driven by Random Excitations,” Appl. Phys. Lett., 96(21), p.214103.
[11] Williams, C., and Yates, R., 1996, “Analysis of a Micro-Electric Generator forMicrosystems,” Sensors Actuators A Phys., 52, pp. 8–11.
[12] Amirtharajah, R., and Chandrakasan, A., 1998, “Self-Powered Signal Process-ing Using Vibration-Based Power Generation,” IEEE J. Solids State Circuits,33(5), pp. 687–695.
[13] Kulkarni, S., Koukharenko, E., Torah, R., Tudor, J., Beeby, S., O’Donnell, T.,and Roy, S., 2008, “Design, Fabrication and Test of Integrated Micro-ScaleVibration-Based Electromagnetic Generator,” Sensors Actuators A Phys., 145,pp. 336–342.
[14] Sodano, H., Inman, D., and Park, G., 2005, “Comparison of PiezoelectricEnergy Harvesting Devices for Recharging Batteries,” J. Intel. Mater. Syst.Struct., 16(10), pp. 799–807.
[15] Adhikari, S., Friswell, M. I., and Inman, D. J., 2009, “Piezoelectric Energy Har-vesting From Broadband Random Vibrations,” Smart Mater. Struct., 18(11), p.115005.
[16] Ali, S., Adhikari, S., and Friswell, M. I., 2010, “Piezoelectric Energy Harvest-ing With Parametric Uncertainty,” Smart Mater. Struct., 19(10), p. 105010.
[17] Sodano, H. A., Park, G., and Inman, D. J., 2004, “Estimation of Electric ChargeOutput for Piezoelectric Energy Harvesting,” Strain, 40(2), pp. 49–58.
[18] Stephen, N. G., 2006, “On Energy Harvesting From Ambient Vibration,” J.Sound Vib., 293, pp.409–425.
[19] Ng, T., and Liao, W., 2005, “Sensitivity Analysis and Energy Harvesting for aSelf-Powered Piezoelectric Sensor,” J. Intel. Mater. Syst. Struct., 16(10), pp.785–797.
[20] Cornwell, P., Goethals, J., Kowtko, J., and Damianakis, M., 2005, “EnhancingPower Harvesting Using a Tuned Auxiliary Structure,” J. Intel. Mater. Syst.Struct., 16, pp. 825–834.
[21] Beeby, S. P., Torah, R. N., Tudor, M. J., Glynne-Jones, P., O’Donnell, T., Saha,C. R., and Roy, S., 2007, “A Micro Electromagnetic Generator for VibrationEnergy Harvesting,” J. Micromech. Microeng., 17(7), pp. 1257–1265.
Fig. 9 Frequency responses of primary structure displace-ment for classical DVA (i.e., with nondimensional time constanta 5 0 and nondimensional coupling coefficient j2 5 0) andenergy harvesting DVA
041004-8 / Vol. 80, JULY 2013 Transactions of the ASME
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms

[22] Nakano, K., Suda, Y., and Nakadai, S., 2003, “Self Powered Active VibrationControl Using a Single Electric Actuator,” J. Sound Vib., 260, pp. 213–235.
[23] Choi, Y. T., and Wereley, N. M., 2009, “Self Powered MagnetorheologicalDampers,” ASME J. Vib. Acoust., 131, p. 044501.
[24] Chtiba, M. O., Choura, S., Nayfeh, A. H., and El-Borgi, S., 2010, “VibrationConfinement and Energy Harvesting in Flexible Structures Using CollocatedAbsorbers and Piezoelectric Devices,” J. Sound Vib., 329, pp. 261–276.
[25] Tang, X., and Zuo, L., 2010, “Regenerative Semi Active Control of Tall Build-ing Vibration With Series TMDs,” American Control Conference, Baltimore,MD, June 30–July 2, Vol. FrA12.1, pp. 5094–5099.
[26] Hartog, J. P. D., 1985, Mechanical Vibrations, Dover, New York.[27] Caughey, T. K., and O’Kelly, M. E. J., 1965, “Classical Normal Modes in
Damped Linear Dynamic Systems,” ASME J. Appl. Mech., 32, pp. 583–588.[28] Adhikari, S., 2006, “Damping Modelling Using Generalized Proportional
Damping,” J. Sound Vib., 293(1–2), pp. 156–170.[29] Ormondroyd, J., and Hartog, J. P. D., 1928, “Theory of the Dynamic Vibration
Absorber,” Trans. Am. Soc. Mech. Eng., 50, pp. 9–22.[30] Randall, S. E., Halsted, D. M., and L. Taylor, D., 1981, “Optimum Vibration
Absorber for Linear Damped System,” ASME J. Mech. Design, 103, pp.908–913.
[31] Zhu, S. J., Zheng, Y. F., and Fu, Y. M., 2004, “Analysis of Non-Linear Dynam-ics of a Two-Degree-of-Freedom Vibration System With Non-Linear Dampingand Non-Linear Spring,” J. Sound Vib., 271(1–2), pp. 15–24.
[32] Liu, K., and Coppola, G., 2010, “Optimal Design of Damper Dynamic Vibra-tion Absorber for Damped Primary Systems,” Trans. Can. Soc. Mech. Eng.,34(1), pp. 119–135.
[33] Thompson, A. G., 1980, “Optimizing the Untuned Viscous Dynamic VibrationAbsorber With Primary System Damping: A Frequency Locus Method,” J.Sound Vib., 77, pp. 469–472.
[34] Pennestri, E., 1998, “An Application of Chebyshev’s Min-Max Criterion to theOptimum Design of a Damped Dynamic Vibration Absorber,” J. Sound Vib.,217, pp. 757–765.
[35] Brown, B., and Singh, T., 2011, “Minimax Design of Vibration Absorbers forLinear Damper Systems,” J. Sound Vib., 330, pp. 2437–2448.
[36] Ghosh, A., and Basu, B., 2007, “A Closed-Form Optimal Tuning Criterionfor TMD in Damped Structures,” Struct. Control Health Monitor., 14, pp.681–692.
[37] Dutoit, N. E., Wardle, B. L., and Kim, S.-G., 2005, “Design Consideration ForMEMS Scale Piezoelectric Mechanical Vibration Energy Harvesters,” Inte-grated Ferroelectrics Int. J., 71(1), pp. 121–160.
Journal of Applied Mechanics JULY 2013, Vol. 80 / 041004-9
Downloaded From: http://appliedmechanics.asmedigitalcollection.asme.org/ on 06/02/2013 Terms of Use: http://asme.org/terms