Embed Size (px)
Citation preview
Enabling Time- andMission-Critical Applications in
Industrial Wireless SensorNetworks
Hossam Farag
Department of Information Systems and TechnologyMid Sweden University
Licentiate Thesis No. 151Sundsvall, Sweden
2019

MittuniversitetetInformationssystem och -teknologi
ISBN 978-91-88527-84-4 SE-851 70 SundsvallISNN 1652-8948 SWEDEN
Akademisk avhandling som med tillstand av Mittuniversitetet i Sundsvall framlaggestill offentlig granskning for avllaggande av teknologie licentiatexamen Onsdagenden 30 januari 2019 i M102, Mittuniversitetet, Holmgatan 10, Sundsvall.
c©Hossam Farag, 2019
Tryck: Tryckeriet Mittuniversitetet
My WifeMy Parents

iv

Abstract
Nowadays, Wireless Sensor Networks (WSNs) ”have gained importance as aflexible, easier deployment/maintenance and cost-effective alternative to wired net-works, e.g., Fieldbus and Wired-HART, in a wide-range of applications. Initially,WSNs were mostly designed for military and environmental monitoringapplications where energy efficiency is the main design goal. The nodes in thenetwork were expected to have a long lifetime with minimum maintenance whileproviding best-effort data delivery which is acceptable in such scenarios. With re-cent advances in the industrial domain, WSNs have been subsequently extendedto support industrial automation applications such as process automation and con-trol scenarios. However, these emerging applications are characterized by stringentrequirements regarding reliability and real-time communications that impose chal-lenges in the design of Industrial Wireless Sensor Networks (IWSNs) to effectivelysupport time- and mission-critical applications.
Typically, time- and mission-critical applications support different traffic cate-gories ranging from relaxed requirements, such as monitoring traffic to firm require-ments, such as critical safety and emergency traffic. The critical traffic is mostlyacyclic in nature and occasionally occurs at unpredictable time instants. Once it isgenerated, it must be delivered within strict deadlines. Exceeding the delay boundcould lead to system instability, economic loss, or even endanger human life in theworking area. The situation becomes even more challenging when an emergencyevent triggers multiple sensor nodes to transmit critical traffic to the controller si-multaneously. The unpredictability of the arrival of such a type of traffic introducesdifficulties with regard to making a suitable scheduling that guarantees data deliv-ery within deadline bounds. Existing industrial standards and related research workhave thus far not presented a satisfactory solution to the issue. Therefore, providingdeterministic and timely delivery for critical traffic and its prioritization over regulartraffic is a vital research topic.
Motivated by the aforementioned challenges, this work aims to enable real-timecommunication for time- and mission-critical applications in IWSNs. In this con-text, improved Medium Access Control (MAC) protocols are proposed to enablea priority-based channel access that provides a timely delivery for acyclic criticaltraffic. The proposed framework starts with a stochastic modelling of the networkdelay performance under a priority-oriented transmission scheme, followed by twoMAC approaches. The first approach proposes a random Clear Channel Assess-
v
vi
ment (CCA) mechanism to improve the transmission efficiency of acyclic controltraffic that is generated occasionally as a result of observations of an establishedtendency, such as closed-loop supervisory traffic. A Discrete-Time Markov Chain(DTMC) model is provided to evaluate the performance of the proposed protocolanalytically in terms of the expected delay and throughput. Numerical results showthat the proposed random CCA mechanism improves the shared slots approach inWirelessHART in terms of delay and throughput along with better transmission re-liability.
The second approach introduces a slot-stealing MAC protocol based ona dynamic deadline-aware scheduling to provide deterministic channel access inemergency and event-based situations, where multiple sensor nodes are triggered si-multaneously to transmit time-critical data to the controller. The proposedprotocol is evaluated mathematically to provide the worst-case delay bound for thetime-critical traffic and the numerical results show that the proposed approach out-performs TDMA-based WSNs in terms of delay and channel utilization.

Acknowledgements
Praise be to Allah
I would like to take this opportunity to express my heartfelt appreciation to thefollowing persons who have contribute directly or indirectly to the completion ofthis work. Firstly, my sincere gratitude to my supervisor, Prof. Mikael Gidlund, forhis constant support and guidance in my research work. I would like to thank himfor his continuous support, insightful suggestions, encouraging feedback, and thefreedom in choosing research directions.
Thanks to my co-supervisor Dr. Patrik Osterberg for his support, useful com-ments and constructive criticisms that have helped to improve this work. Also, Iwould like to thank him for his administrative support in other department-relatedissues.
Thanks to Dr. Aamir Mahmood for his excellent cooperation and discussionsduring my research work. Thanks to Simone Grimaldi, Teklay Gebremichael, RaulRondon, Mehrzad Lavassani and all other colleagues at the Department of Informa-tion Systems and Technology, Mid Sweden University for their kindness and friend-liness.
Last but not least, special thanks to my dear wife, Samira, for her endless love,support and for standing behind me in all what I do. Thanks to all my family andfriends for supporting me spiritually throughout my life.
vii
viii
Contents
Abstract v
Acknowledgements vii
List of Papers xi
Terminology xv
1 Introduction 1
1.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Overall Aim and Research Topic . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Background and Related Work 7
2.1 Overview of IWSNs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Overview of the Industrial Standards for PA Applications . . . . . . . 8
2.2.1 WirelessHART . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.2 ISA100.11a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.3 WIA-PA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.4 Zigbee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.5 IEEE 802.15.4e . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 MAC Protocols in IWSNs . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 General Taxonomy of Wireless MAC Protocols . . . . . . . . . . 11
ix
x CONTENTS
2.3.2 MAC Protocols in IWSNs Standards . . . . . . . . . . . . . . . . 12
2.3.3 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Priority-Based Real-Time Communication in IWSNs 19
3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Modelling Priority-Oriented Packet Transmissions . . . . . . . . . . . . 19
3.3 Improving the Transmission Efficiency of Acyclic Traffic in IWSNs . . 21
3.4 Deterministic Real-Time Communication of Multiple Critical Flows . . 22
4 Summary of Publications 27
5 Conclusions and Future Work 33
5.1 Concluding Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2 Ethical and Societal Considerations . . . . . . . . . . . . . . . . . . . . . 34
5.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Bibliography 37
Paper I 43
Paper II 59
Paper III 75
Biography 99

List of Papers
This thesis is mainly based on the following papers, herein referred by their Romannumerals:
Paper I Priority-Oriented Packet Transmissions in Internet of Things:Modeling and Delay AnalysisLakshmikanth Guntupalli, Hossam Farag, Aamir Mahmood, andMikael GidlundIn Proceedings of IEEE International Conference on Communications (ICC 2018),Kansas City, USA, May 2018.
Paper II PR-CCA MAC: A Prioritized Random CCA MAC Protocol for Mission-Critical IoT ApplicationsHossam Farag, Aamir Mahmood, Mikael Gidlund, and Patrik OsterbergIn Proceedings of IEEE International Conference on Communications (ICC 2018),Kansas City, USA, May 2018.
Paper III A Delay-Bounded MAC Protocol for Mission- and Time-CriticalApplications in Industrial Wireless Sensor NetworksHossam Farag, Mikael Gidlund, and Patrik OsterbergIn IEEE Sensors Journal, Vol. 18, No. 6, pp. 2607-2616, March 2018.
xi

xii

List of Figures
1.1 Example of future industrial automation networks [25]. . . . . . . . . 2
1.2 Traffic categories in PA applications and their corresponding latencyrequirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Research work flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Protocol stack comparison of industrial standards for PA applications. 9
2.2 Wireless MAC protocols taxonomy. . . . . . . . . . . . . . . . . . . . . 11
2.3 The superframe structure of Zigbee, WIA-PA, WirelessHART and ISA100.11a[9]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 TSCH superframe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 DSME multi-superframe structure. . . . . . . . . . . . . . . . . . . . . 14
3.1 Performance comparisons. . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Slot timing structure of the proposed PR-CCA protocol. . . . . . . . . 21
3.3 Performance comparisons. . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 SS-MAC channel access scenario. . . . . . . . . . . . . . . . . . . . . . 23
3.5 Worst-case delay comparison versus different number of nodes. . . . . 25
3.6 Utilization comparisons. . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
xiii

xiv
Terminology
Abbreviations and Acronyms
CAN Controller Area NetworkCAP Contention Access PeriodCCA Clear Channel AssessmentCDMA Code Division Multiple AccessCFP Contention Free PeriodCSMA/CA Carrier Sense Multiple Access with Collision AvoidanceCTS Clear-To-SendDSME Deterministic and Synchronous Multi-channel ExtensionDTMC Discrete-Time Markov ChainFA Factory AutomationFDMA Frequency Division Multiple AccessGTS Guaranteed Time SlotHART Highway Addressable Remote TransducerHCF HART Communication FoundationISA International Society of AutomationIWSN Industrial Wireless Sensor NetworkLLDN Low-Latency Deterministic NetworkMAC Medium Access ControlMEMS Micro Electro-Mechanical SystemsPA Process AutomationRTS Request-To-SendTDMA Time Division Multiple AccessTSCH Time Slotted Channel HoppingTSMP Time Synchronized Mesh ProtocolWIA-PA Wireless networks for Industrial Automation-Process Automa-
tionWSN Wireless Sensor Network
xv

xvi
Chapter 1
Introduction
1.1 Overview
With recent advances in wireless communications and Micro Electro-MechanicalSystems (MEMS) technology, Wireless Sensor Networks (WSNs) found their wayinto a wide range of applications and systems where sensor nodes harvest infor-mation from their physical environment. Initially, WSNs were mostly designed formilitary, environmental monitoring and healthcare applications [1], where operationwith little or no human intervention for long periods of time is required. Therefore,energy efficiency was the main design goal for such applications, as the nodes inthe network were expected to have long lifetime. The field of industrial automationhas introduced effective and low-cost solutions in order to improve the productiv-ity and efficiency of the industrial process[2]. In a typical field network such asthe one shown in Fig. 1.1, sensor nodes are distributed in the working field to cap-ture real-world measurements, such as temperature, pressure and vibration, and for-ward the collected information to a central node. Based on the received information,the controller may accordingly send control commands to the actuators to performnecessary control actions. Traditionally, industrial automation systems are realizedthrough wired communications, which are served by fieldbus systems [3] such asPROFIBUS [4], wired-Highway Addressable Remote Transducer (wired-HART) [5]or Controller Area Network (CAN) [6].
The concept of Industrial Wireless Sensor Networks (IWSNs) is introduced as analternative to the wired solution to enable low-cost and low-power wireless technol-ogy in the industrial domain, and hence offers competitive advantages. First of all,the cost and time needed for the installation and maintenance of the large number ofcables normally required in the industrial environment can be substantially reduced,thus making plant set-up and reconfiguration easier, especially in such harsh envi-ronments where chemicals, vibrations, or moving parts exist and could potentiallydamage any sort of cabling. The industrial market [7] estimates that IWSNs enablecost savings of up to 90% compared to the deployment cost of wired field devices in
1

2 Introduction
Figure 1.1: Example of future industrial automation networks [25].
the industrial automation domain. Furthermore, IWSNs provide great availability asit can offer built-in redundancy and capabilities for anticipatory system maintenanceand failure recovery. Flexibility of adding new nodes to the network and operate indifferent network topologies is another added advantage.
However, in order to satisfy the strict real-time requirements of time- and mission-critical applications in the industrial domain, the design of IWSNs introduces manychallenges. In this context, real-time means that the system can only function prop-erly, and sometimes safely, if data arrives in a timely and reliable fashion. Unaccept-able delay in conveying sensed information can result in undesired complicationssuch as, damage to the equipment or threat to human life [8]. For instance, in a plas-tic extrusion plant, reporting excessive melt pressure in a timely fashion is crucial inorder to avoid explosion. Moreover, the critical traffic in these applications is mostlyacyclic in nature which, imposes a challenge to schedule such traffic to meet its cor-responding time constraints. This research work mainly focuses on how to supportreal-time communication for such applications.
1.2 Problem Statement
Most existing network protocols are designed primarily to provide energy effi-cient performance for a longer lifetime for the network while providing only best-effort performance for data delivery. Such behaviour is adequate for applicationswhere the communication delay can be tolerated, i.e., collected data is not used totrigger actions immediately. However, this best-effort performance is no longer suit-able for time- and mission-critical applications, such as fire alarms, leakage of poi-
1.2 Problem Statement 3
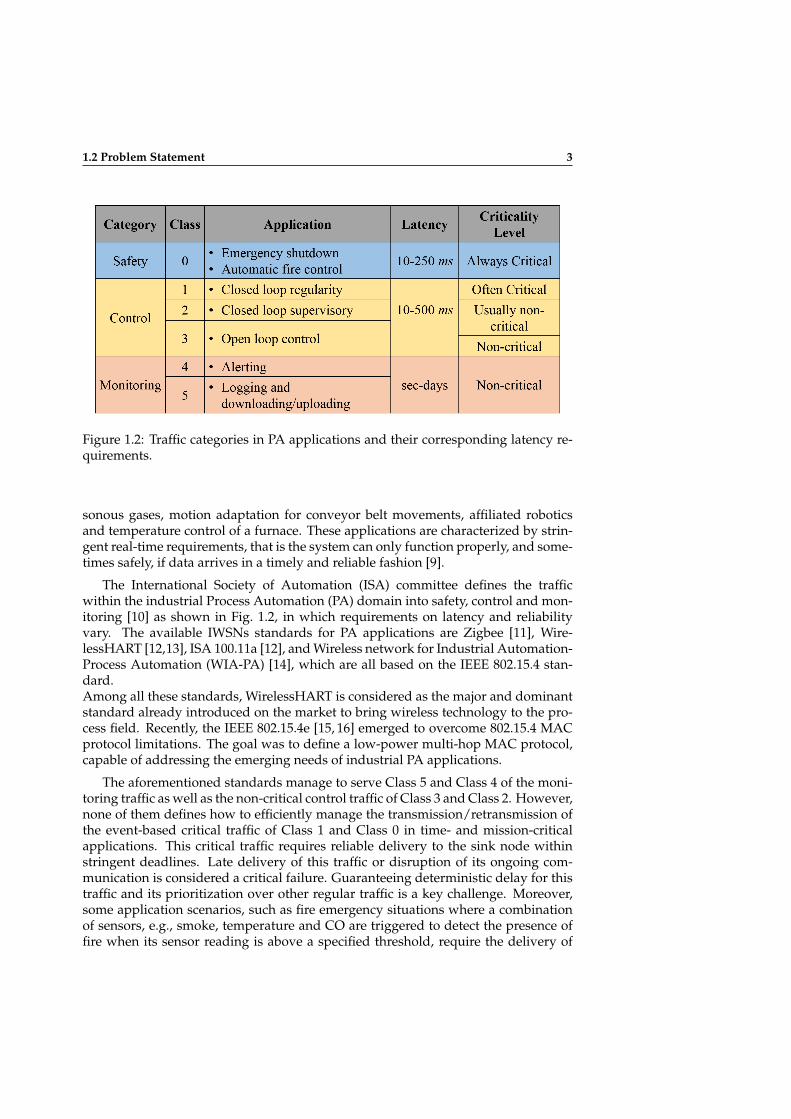
Figure 1.2: Traffic categories in PA applications and their corresponding latency re-quirements.
sonous gases, motion adaptation for conveyor belt movements, affiliated roboticsand temperature control of a furnace. These applications are characterized by strin-gent real-time requirements, that is the system can only function properly, and some-times safely, if data arrives in a timely and reliable fashion [9].
The International Society of Automation (ISA) committee defines the trafficwithin the industrial Process Automation (PA) domain into safety, control and mon-itoring [10] as shown in Fig. 1.2, in which requirements on latency and reliabilityvary. The available IWSNs standards for PA applications are Zigbee [11], Wire-lessHART [12,13], ISA 100.11a [12], and Wireless network for Industrial Automation-Process Automation (WIA-PA) [14], which are all based on the IEEE 802.15.4 stan-dard.Among all these standards, WirelessHART is considered as the major and dominantstandard already introduced on the market to bring wireless technology to the pro-cess field. Recently, the IEEE 802.15.4e [15, 16] emerged to overcome 802.15.4 MACprotocol limitations. The goal was to define a low-power multi-hop MAC protocol,capable of addressing the emerging needs of industrial PA applications.
The aforementioned standards manage to serve Class 5 and Class 4 of the moni-toring traffic as well as the non-critical control traffic of Class 3 and Class 2. However,none of them defines how to efficiently manage the transmission/retransmission ofthe event-based critical traffic of Class 1 and Class 0 in time- and mission-criticalapplications. This critical traffic requires reliable delivery to the sink node withinstringent deadlines. Late delivery of this traffic or disruption of its ongoing com-munication is considered a critical failure. Guaranteeing deterministic delay for thistraffic and its prioritization over other regular traffic is a key challenge. Moreover,some application scenarios, such as fire emergency situations where a combinationof sensors, e.g., smoke, temperature and CO are triggered to detect the presence offire when its sensor reading is above a specified threshold, require the delivery of
4 Introduction
multiple triggered data having the same priority (importance). This introduces achallenge of how to schedule the transmissions to deliver each critical flow withinits corresponding deadline bound.
1.3 Overall Aim and Research Topic
The aim of this work is to push the existing IWSNs technology to efficiently sup-port the event-based critical traffic of Class 0 and Class 1. In particular, the objectiveis to develop solutions to enable timely delivery for the non-deterministic criticaltraffic and its prioritization over the non-critical one along with efficient channel uti-lization in time- and mission-critical applications.
Based on the discussion in the previous section, the research topic can be formu-lated into the following questions:
• RQ1: How can the effect of packet prioritization on the average delayperformance under different traffic conditions be modelled and analysed?
• RQ2: Acyclic traffic is unpredictable in nature, how can timely delivery regard-ing the transmission/retransmission of such traffic in IWSNs be enabled?
• RQ3: In emergency and safety-related situations in particular, multiple nodesare simultaneously triggered to send critical data to the controller within strin-gent deadline bounds. How can deterministic channel access for the triggeredtraffic with a delay bounded performance be scheduled, while maintaining ef-ficient channel utilization?
1.4 Methodology
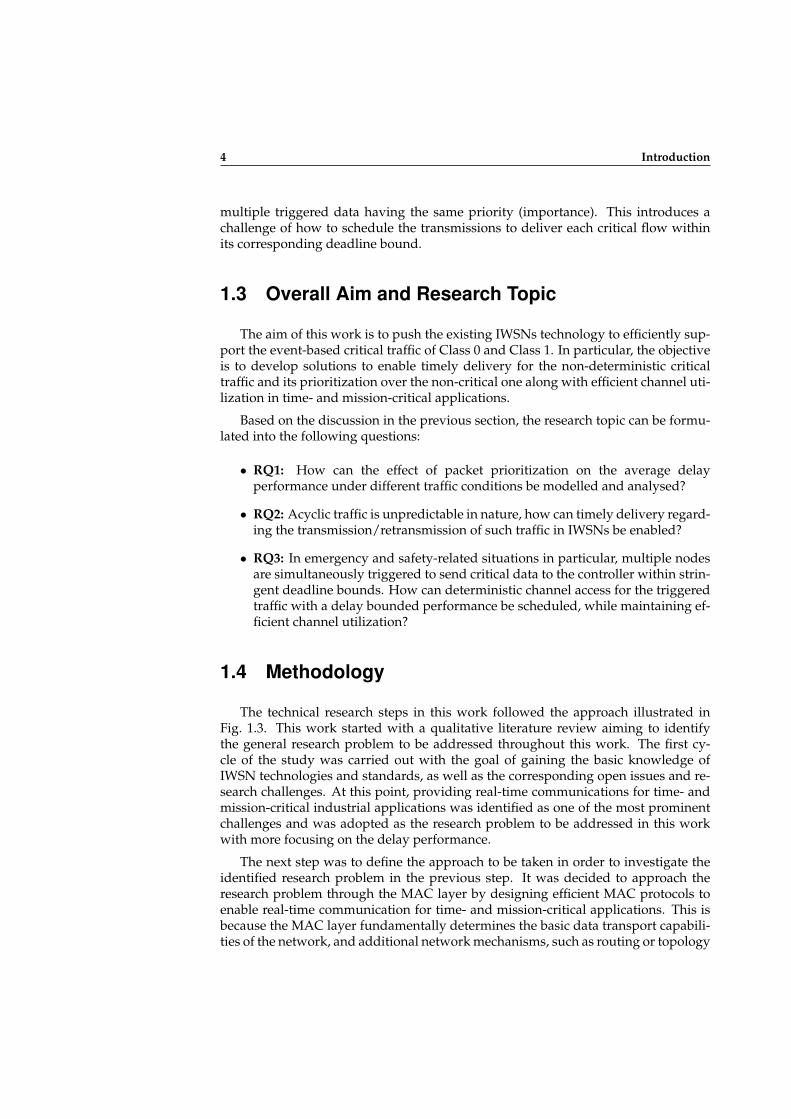
The technical research steps in this work followed the approach illustrated inFig. 1.3. This work started with a qualitative literature review aiming to identifythe general research problem to be addressed throughout this work. The first cy-cle of the study was carried out with the goal of gaining the basic knowledge ofIWSN technologies and standards, as well as the corresponding open issues and re-search challenges. At this point, providing real-time communications for time- andmission-critical industrial applications was identified as one of the most prominentchallenges and was adopted as the research problem to be addressed in this workwith more focusing on the delay performance.
The next step was to define the approach to be taken in order to investigate theidentified research problem in the previous step. It was decided to approach theresearch problem through the MAC layer by designing efficient MAC protocols toenable real-time communication for time- and mission-critical applications. This isbecause the MAC layer fundamentally determines the basic data transport capabili-ties of the network, and additional network mechanisms, such as routing or topology
1.4 Methodology 5
Figure 1.3: Research work flow.
control, are often integrated into the MAC protocol or closely aligned with its designchoices. Moreover, the MAC layer controls access to the physical shared mediumwhich mainly controls the delay performance of the network.
The following stage was to thoroughly review the recent work approaches thatdeal with the defined research problem, which also helped in identifying a numberof research gaps. The identified research problem and the corresponding researchgaps were then formulated into the research questions RQ1, RQ2 and RQ3. Next,a set of MAC protocols have been developed in order to investigate and approachthe challenges highlighted by the aforementioned research questions. The basic ideaof the proposed MAC protocols is to enable timely delivery for the unpredictablecritical traffic by providing priority-based medium access schemes.
RQ1 was initially addressed by introducing an analytical modelling approach fora priority-oriented packet transmission scheme. The aim was to develop analyticalmodels to examine the average delay performance of priority-oriented transmissionsover a duty-cycled MAC protocol in low as well as heavy traffic conditions. The nextphase was to introduce two MAC protocols in order to attack the issues highlightedby RQ2 and RQ3. Probability theory and Markov chains are used to evaluate theproposed protocols analytically to provide an intuition on performance metrics suchas the delay. Moreover, the effectiveness of the proposed protocols is revealed byintroducing comparisons with the available industrial standards and state-of-the-art. The output of the aforementioned research work is presented in the contributedpapers listed in the following section.
Finally, a review was conducted to verify that the research objective has beenreached based on the formulated research questions, and possible directions for fu-ture work were outlined.

6 Introduction
1.5 Contributions
The work in this thesis is summarized in the following papers, included in full atthe end of this work:
• Paper I introduces a stochastic model for priority-oriented packet transmis-sions over a synchronous duty cycling MAC protocol. Two Discrete TimeMarkov Chain (DTMC) models are developed to examine the effect of packetprioritization on the average delay performance. A 2D DTMC model repre-sents the priority and queuing behaviour at a node while a 1D DTMC modelsthe active nodes in the network. Both models are fused together in order toevaluate the delay performance analytically. The accuracy of the models isdemonstrated via discrete-event simulations as both results match precisely.The proposed work aims at addressing RQ1 and was also the kick-off for theremaining contributions.
• Paper II aims to answer RQ2 by introducing a priority-based MAC protocolto handle the transmissions/retransmissions of acyclic critical data in a timelyfashion. An efficient random Clear Channel Assessment (CCA) mechanism isproposed to enable low collision probability between contending nodes whichin turn improves the performance in terms of delay and throughput.
• Paper III proposes SS-MAC, a slot stealing MAC protocol to provide deter-ministic real-time communication for time- and mission-critical applications inIWSNs. SS-MAC handles concurrent transmissions in emergency situationswhere multiple sensor nodes are simultaneously triggered to send critical datato the controller. The triggered nodes are deterministically scheduled by thecontroller node to transmit their critical data based on a dynamic deadline-aware schedule. The transmission of critical data is characterized by a deter-ministic delay bound to guarantee predictable performance. This work aims toanswer RQ3.
1.6 Thesis Outline
The reminder of this thesis is organised as follows. Chapter 2 introduces a com-prehensive background and related work about the research topic. Chapter 3 de-scribes the proposed approach presented here. Contributed papers are summarizedin Chapter 4 followed by the conclusion and suggested future work directions inChapter 5.
Chapter 2
Background and Related Work
2.1 Overview of IWSNs
During the past decade, WSNs have been introduced into a wide variety of appli-cations [17], such as health monitoring of civil infrastructures [18], personal healthmonitoring [19], smart grid [20], agriculture [21], and industrial automation [10].Adopting emerging wireless technology through the deployment of IWSNs offerscompetitive advantages over the wired solutions in the industrial domain, such aslow-cost, flexibility, easy deployment/maintenance and self-configuration [10, 22].This leads to an improvement of product quality, streamlining operations and speed-ing up production, which in turn revolutionizes the industrial processing and helpsthe industry meet the demands of increased competitiveness in the marketplace.
The industrial domain can be divided into different domains, such as PA andFactory Automation (FA) [23]. In PA applications, the product is processed in a con-tinuous manner (e.g. oil, gas, chemicals). In FA applications (e.g. automotive, med-ical, and the food industries) the products are processed in discrete steps, i.e., theproducts are assembled together using sub-assemblies or single components. FA ismainly characterized by short range communications (< 10m) and its correspondingstandards are mainly star networks, while PA has a longer range of communications(> 100m), and the standards propose mesh networks. Moreover, since the discreteproduct in FA needs to be picked, assembled or palletized at high speeds, the sam-pling rate and real-time requirements are often stricter than those of PA. This workmainly focuses on IWSNs deployed in PA applications.
The benefits that can be offered by IWSNs are facing certain bounds mainly dueto the nature of the harsh environment in the industrial domain. These limitationslead to certain research challenges, including, but not limited to, the following:
• Real-time communication: Critical traffic in PA applications, such as safety andclosed loop regularity, are extremely delay sensitive and should be transmittedin s deterministic, timely and reliable fashion [24]. A too late arrival means lim-
7

8 Background and Related Work
ited use, and may cause system degradation, economical loss, or even worse,endanger human life [8].
• Service differentiation: Due to the inherent mixed-criticality property in a typi-cal PA application, IWSNs should also be designed to provide service differen-tiation for wireless medium access. The challenge is how to provide the criticaltraffic with the highest priority to access the channel in conjunction with itsunpredictable nature.
• Coexistence and interference avoidance: A typical industrial site contains var-ious wireless networks and communication systems operating at the 2.4 GHzISM band which creates interference of the radio signals [25].
• Safety: The automation equipment should be strictly designed to avoid or re-duce the risk of uncontrolled or dangerous situations for the safety of humans,environment and property [23].
• Energy consumption: Nodes are required to be energy efficient to ensure alonger lifetime of the network and avoid frequent scheduled maintenance forthousands of nodes. This a serious problem for the industries that are expectedto operate flawlessly around the clock [23].
• Security: The efficient integration of security mechanisms with the automa-tion system and protecting the system against denial-of-service attacks is a keyissue [26].
Based on the considered application requirements, some issues are more importantthan others. For instance, in time- and mission-critical applications, the determin-istic real-time performance is a more important issue than the energy consumption[24]. The existing industrial standards for PA could not satisfy some issues in a sat-isfactory manner, and thus new research directions in this context are revealed. Thework in this thesis mainly addresses the first two requirements/challenges, whichare closely related to time- and mission-critical applications.
2.2 Overview of the Industrial Standards for PA Ap-plications
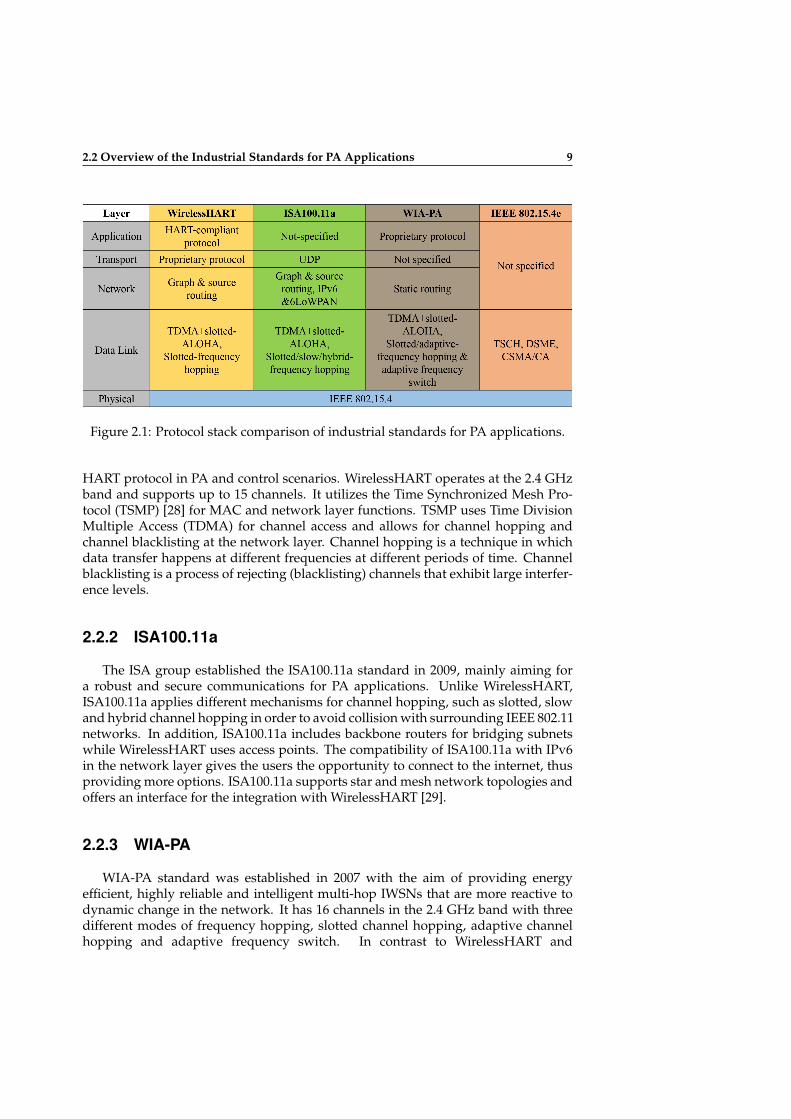
The available industrial standards within the PA domain are mainly based onthe PHY layer of the IEEE 802.15.4 standard. The PHY layer of the IEEE 802.15.4standard is designed to support short-range communications that offers a low datarate, low-cost and low-power consumption solution for industrial applications [27].A rough comparison between the standards is shown in Fig. 2.1.
2.2.1 WirelessHART
WirelessHART was officially released by the HCF in 2007, aiming to be compati-ble with existing HART devices by adding wireless communication capability to the
2.2 Overview of the Industrial Standards for PA Applications 9
Figure 2.1: Protocol stack comparison of industrial standards for PA applications.
HART protocol in PA and control scenarios. WirelessHART operates at the 2.4 GHzband and supports up to 15 channels. It utilizes the Time Synchronized Mesh Pro-tocol (TSMP) [28] for MAC and network layer functions. TSMP uses Time DivisionMultiple Access (TDMA) for channel access and allows for channel hopping andchannel blacklisting at the network layer. Channel hopping is a technique in whichdata transfer happens at different frequencies at different periods of time. Channelblacklisting is a process of rejecting (blacklisting) channels that exhibit large interfer-ence levels.
2.2.2 ISA100.11a
The ISA group established the ISA100.11a standard in 2009, mainly aiming fora robust and secure communications for PA applications. Unlike WirelessHART,ISA100.11a applies different mechanisms for channel hopping, such as slotted, slowand hybrid channel hopping in order to avoid collision with surrounding IEEE 802.11networks. In addition, ISA100.11a includes backbone routers for bridging subnetswhile WirelessHART uses access points. The compatibility of ISA100.11a with IPv6in the network layer gives the users the opportunity to connect to the internet, thusproviding more options. ISA100.11a supports star and mesh network topologies andoffers an interface for the integration with WirelessHART [29].
2.2.3 WIA-PA
WIA-PA standard was established in 2007 with the aim of providing energyefficient, highly reliable and intelligent multi-hop IWSNs that are more reactive todynamic change in the network. It has 16 channels in the 2.4 GHz band with threedifferent modes of frequency hopping, slotted channel hopping, adaptive channelhopping and adaptive frequency switch. In contrast to WirelessHART and
10 Background and Related Work
ISA100.11a, WIA-PA adopts the IEEE 802.15.4 MAC layer without modification inorder to easily co-exist with extensive existing IEEE 802.15.4-based systems. An-other difference is that WIA-PA network supports a hierarchical network topology,which is basically a star-plus-mesh topology. The first level of the network has amesh topology, which consists of routers and gateways, while the second level is astar topology, composed of routers and field devices. WIA-PA supports interoper-ability with legacy protocols, such as wired HART and PROFIBUS, and also offerssupport for WirelessHART.
2.2.4 Zigbee
The Zigbee wireless standard was developed for a wide range of applications,including industrial automation, however not specifically designed for industrialapplications. It is mainly based on the IEEE 802.15.4 specifications and is mainlysuitable for applications where low-power consumption is given more importancethan providing a real-time performance. Network topologies supported by ZigBeeare star, tree, and mesh topologies, with the latter resulting in a highly dynamic anddistributed system. The number of channels that ZigBee can use is 27, since it utilizesall three bands defined by the PHY layer in IEEE 802.15.4.
2.2.5 IEEE 802.15.4e
Due to the shortcoming of the IEEE 802.15.4 MAC for industrial applications,the IEEE 802.15.4e working group was created in 2008 to enhance the IEEE 802.15.4MAC protocol, in order to provide improved support for PA applications [10]. TheIEEE 802.15.4e standard offers two operation modes for PA applications, which areTime Slotted Channel Hopping (TSCH) and Deterministic and Synchronous Multi-channel Extension (DSME) [30]. The core technology of the TSCH is mainly inheritedfrom WirelessHART and ISA100.11a standards (combined TDMA and channel hop-ping feature) [31], while the key technology of the DSME is also adopted by WIA-PAstandard in advance. The operation of each mode is mutually exclusive and theoperator is recommended to select one of operation modes to form a network.
2.3 MAC Protocols in IWSNs
The MAC protocol is fundamentally responsible for controlling the access tothe shared medium and the underlying communication scheduling among sensornodes, which in turn controls the data transmission capability. Hence, a necessaryfirst step to support time- and mission-critical applications is to find a MAC pro-tocol capable of satisfying deterministic performance bounds regarding delay andreliability.
2.3 MAC Protocols in IWSNs 11
Figure 2.2: Wireless MAC protocols taxonomy.
2.3.1 General Taxonomy of Wireless MAC Protocols
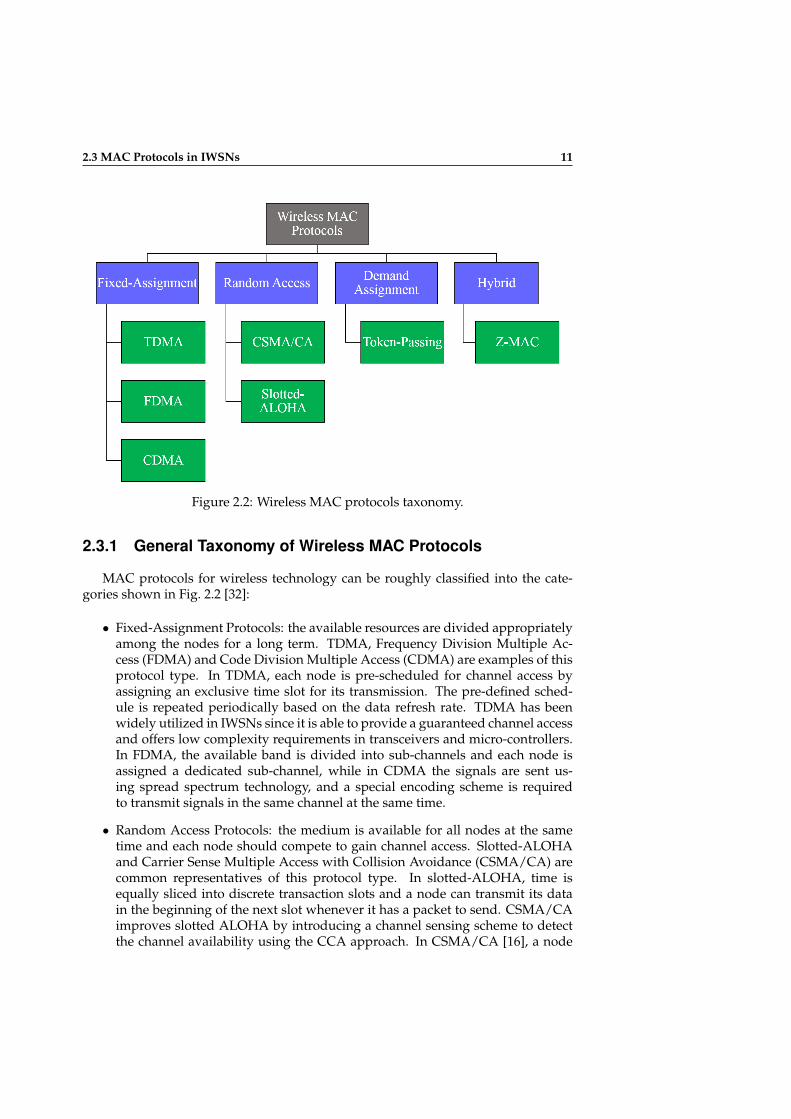
MAC protocols for wireless technology can be roughly classified into the cate-gories shown in Fig. 2.2 [32]:
• Fixed-Assignment Protocols: the available resources are divided appropriatelyamong the nodes for a long term. TDMA, Frequency Division Multiple Ac-cess (FDMA) and Code Division Multiple Access (CDMA) are examples of thisprotocol type. In TDMA, each node is pre-scheduled for channel access byassigning an exclusive time slot for its transmission. The pre-defined sched-ule is repeated periodically based on the data refresh rate. TDMA has beenwidely utilized in IWSNs since it is able to provide a guaranteed channel accessand offers low complexity requirements in transceivers and micro-controllers.In FDMA, the available band is divided into sub-channels and each node isassigned a dedicated sub-channel, while in CDMA the signals are sent us-ing spread spectrum technology, and a special encoding scheme is requiredto transmit signals in the same channel at the same time.
• Random Access Protocols: the medium is available for all nodes at the sametime and each node should compete to gain channel access. Slotted-ALOHAand Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) arecommon representatives of this protocol type. In slotted-ALOHA, time isequally sliced into discrete transaction slots and a node can transmit its datain the beginning of the next slot whenever it has a packet to send. CSMA/CAimproves slotted ALOHA by introducing a channel sensing scheme to detectthe channel availability using the CCA approach. In CSMA/CA [16], a node
12 Background and Related Work
that has a packet to transmit starts by sensing the channel, and if it is found tobe idle, then the packet is transmitted. If the channel is busy, the node defers itstransmission for a random back-off time, which is uniformly selected from therange [0, 320(2BE − 1)µs], where BE is the back-off exponent. The CSMA/CAalgorithm is implemented using units of time called back-off periods [16].
• Demand Assignment Protocols: resources are temporarily allocated to nodes.Once the transmission is completed, the resources are returned. The proto-cols can be used either in centralized or distributed modes. Token-passingprotocols are a well-known example of the distributed demand assignmentprotocols.
• Hybrid Protocols: combining different types of the aforementioned protocolsto exploit their advantages and avoid the limitations. One example is theZ-MAC protocol [33], which combines TDMA and CSMA/CA in order toachieve high throughput under low and high contention levels.
2.3.2 MAC Protocols in IWSNs Standards
Generally speaking, the MAC function in the available PA standards adoptsTDMA, CSMA/CA, slotted-ALOHA, or a combination of them to schedule datatransmissions through the shared medium.
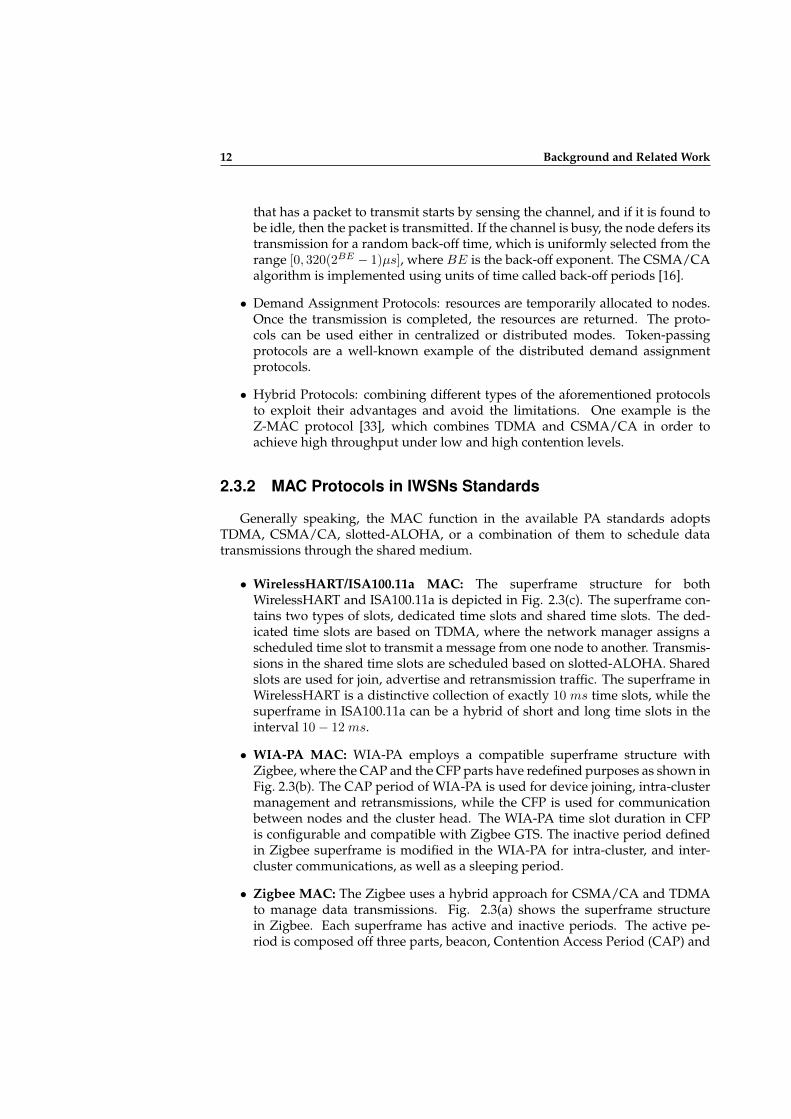
• WirelessHART/ISA100.11a MAC: The superframe structure for bothWirelessHART and ISA100.11a is depicted in Fig. 2.3(c). The superframe con-tains two types of slots, dedicated time slots and shared time slots. The ded-icated time slots are based on TDMA, where the network manager assigns ascheduled time slot to transmit a message from one node to another. Transmis-sions in the shared time slots are scheduled based on slotted-ALOHA. Sharedslots are used for join, advertise and retransmission traffic. The superframe inWirelessHART is a distinctive collection of exactly 10 ms time slots, while thesuperframe in ISA100.11a can be a hybrid of short and long time slots in theinterval 10− 12 ms.
• WIA-PA MAC: WIA-PA employs a compatible superframe structure withZigbee, where the CAP and the CFP parts have redefined purposes as shown inFig. 2.3(b). The CAP period of WIA-PA is used for device joining, intra-clustermanagement and retransmissions, while the CFP is used for communicationbetween nodes and the cluster head. The WIA-PA time slot duration in CFPis configurable and compatible with Zigbee GTS. The inactive period definedin Zigbee superframe is modified in the WIA-PA for intra-cluster, and inter-cluster communications, as well as a sleeping period.
• Zigbee MAC: The Zigbee uses a hybrid approach for CSMA/CA and TDMAto manage data transmissions. Fig. 2.3(a) shows the superframe structurein Zigbee. Each superframe has active and inactive periods. The active pe-riod is composed off three parts, beacon, Contention Access Period (CAP) and
2.3 MAC Protocols in IWSNs 13
Figure 2.3: The superframe structure of Zigbee, WIA-PA, WirelessHART andISA100.11a [9].
Contention Free Period (CFP). The coordinator maintains the synchronizationthrough the transmission of periodic beacons. Following the beacon, the nodescontend for channel access during the CAP using CSMA/CA approach. TheCFP follows the CAP and extends to the end of the active period. In the CFP,the coordinator centrally assigns Guaranteed Time Slots (GTSs) to allow a de-terministic data transmission. Up to 7 GTSs can be assigned to the devices ineach superframe.
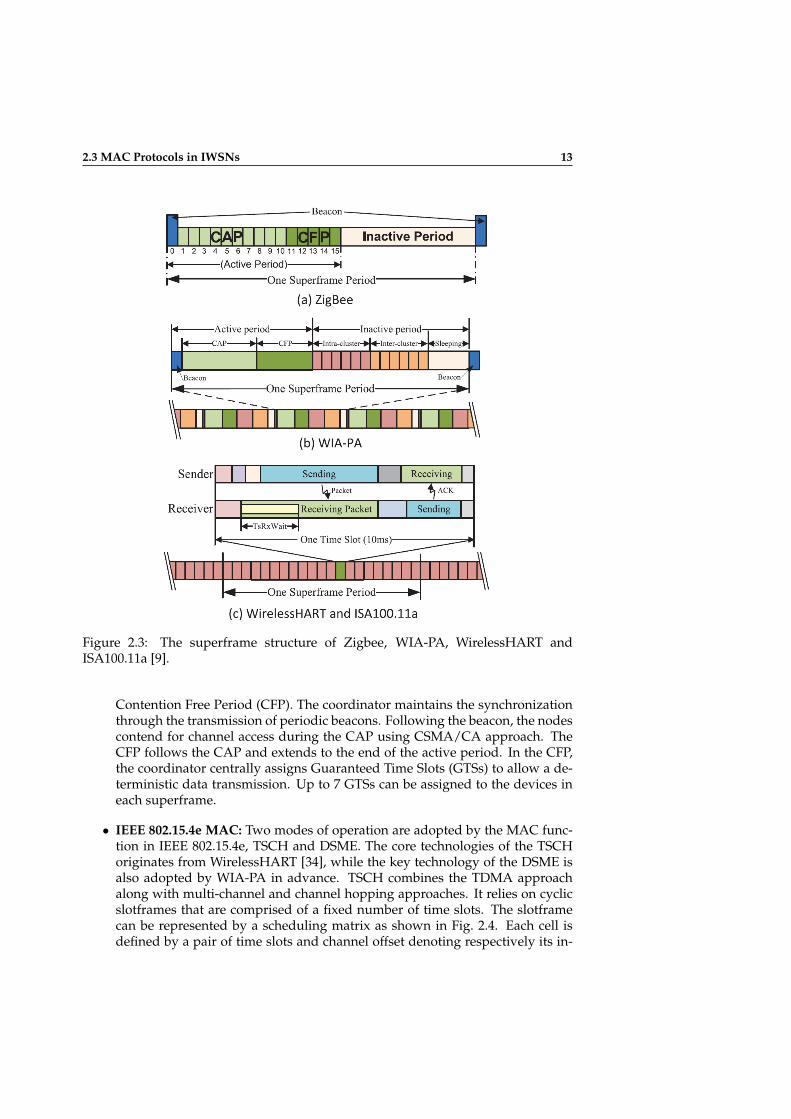
• IEEE 802.15.4e MAC: Two modes of operation are adopted by the MAC func-tion in IEEE 802.15.4e, TSCH and DSME. The core technologies of the TSCHoriginates from WirelessHART [34], while the key technology of the DSME isalso adopted by WIA-PA in advance. TSCH combines the TDMA approachalong with multi-channel and channel hopping approaches. It relies on cyclicslotframes that are comprised of a fixed number of time slots. The slotframecan be represented by a scheduling matrix as shown in Fig. 2.4. Each cell isdefined by a pair of time slots and channel offset denoting respectively its in-
14 Background and Related Work
Figure 2.4: TSCH superframe.
Figure 2.5: DSME multi-superframe structure.
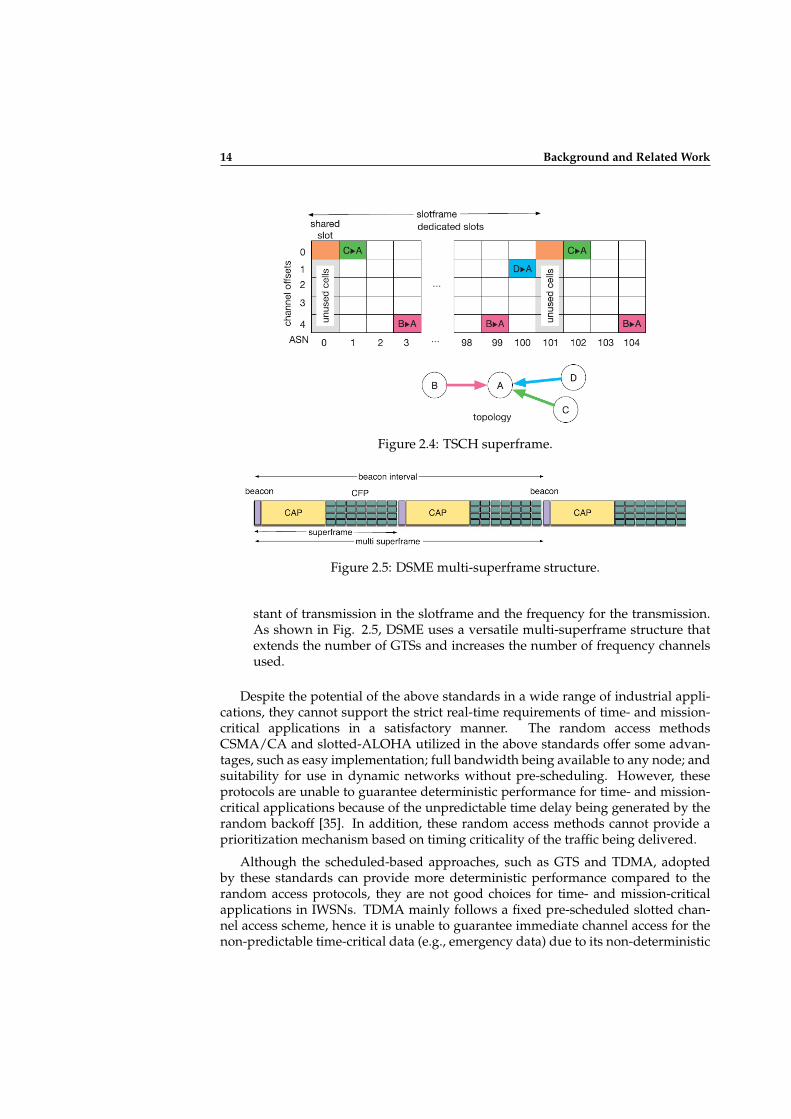
stant of transmission in the slotframe and the frequency for the transmission.As shown in Fig. 2.5, DSME uses a versatile multi-superframe structure thatextends the number of GTSs and increases the number of frequency channelsused.
Despite the potential of the above standards in a wide range of industrial appli-cations, they cannot support the strict real-time requirements of time- and mission-critical applications in a satisfactory manner. The random access methodsCSMA/CA and slotted-ALOHA utilized in the above standards offer some advan-tages, such as easy implementation; full bandwidth being available to any node; andsuitability for use in dynamic networks without pre-scheduling. However, theseprotocols are unable to guarantee deterministic performance for time- and mission-critical applications because of the unpredictable time delay being generated by therandom backoff [35]. In addition, these random access methods cannot provide aprioritization mechanism based on timing criticality of the traffic being delivered.
Although the scheduled-based approaches, such as GTS and TDMA, adoptedby these standards can provide more deterministic performance compared to therandom access protocols, they are not good choices for time- and mission-criticalapplications in IWSNs. TDMA mainly follows a fixed pre-scheduled slotted chan-nel access scheme, hence it is unable to guarantee immediate channel access for thenon-predictable time-critical data (e.g., emergency data) due to its non-deterministic

2.3 MAC Protocols in IWSNs 15
occurrence. Accordingly, the transmission of such data should wait for its dedicatedtime slot, which is not acceptable for industrial applications with strict deadlines.The problem becomes even worse for dense networks where the TDMA frame con-sists of hundreds of scheduled time slots, which also leads to scalability issues. Inaddition, if a time slot is reserved for emergency data in each frame, as this typeof data does not occur periodically. The GTS mechanism can provide a numberof deterministic transmission opportunities for nodes with critical data, however,this mechanism suffers from weak points. First, the number of GTS is limited toseven (GTS starvation) [36], i.e., the network cannot support a guaranteed access formany devices. Second, before a node uses a GTS, it has to send a GTS request in theCAP and wait for the allocation confirmation in the next beacon interval. Third, theGTS allocation is performed based on the First-Come-First-Served (FCFS) approach,which can cause the critical traffic to be blocked when all the GTSs are allocated tothe non-critical traffic.
2.3.3 Related Work
Significant research work has been done in the literature to design MAC proto-cols where the main design goal is to improve the energy efficiency of the WSN tomaintain a long lifetime of the network and reduce maintenance cycles [37]. Theseprotocols are very energy efficient, however, they provide only simple best-effort de-lay performance for data delivery. Among them, S-MAC protocol [38] is one of theprominent pioneering studies on MAC protocols in the context of energy efficiency,where the periodic duty-cycle concept is utilized to reduce idle listening. A node co-ordinates its fixed sleep/active period with neighbours using SYNC packets. Withinan active period, nodes follow the Request-To-Send (RTS) and Clear-To-Send (CTS)handshake mechanism to avoid collision. However, because of the scheduling ofthe fixed duty cycle, this will cause an unacceptable delay, which makes this MACprotocol unsuitable for time- and mission-critical applications. The reliability andtiming constraints required in such applications can be met by introducing routingprotocols [39] or MAC protocols that are capable of satisfying the stringent real-time performance. Focusing on MAC protocols, several MAC protocols have beenproposed in the literature in order to overcome the aforementioned limitations andprovide real-time communication for time- and mission-critical applications [24].
Adaptive scheduling and allocation algorithms are introduced in [40–43] to pro-vide low latency and efficient utilization of time-critical data. However, these algo-rithms mostly adopt CSMA/CA for channel access, which cannot provide the de-terministic delay performance required by time- and mission-critical applications.Furthermore, no priority differentiation mechanism is considered to prioritize crit-ical data over the non-critical one. A priority-aware multi-channel framework hasbeen proposed in [44] to improve the Low-Latency Deterministic Network (LLDN)in IEEE 802.15.4e by introducing a message priority mechanism with multi-channeltransmission to avoid deadline miss. The work only considers periodic traffic, whichis not the case for critical events generated at unpredictable instants.
The HyMAC protocol [45] is a hybrid TDMA/FDMA protocol dividing time into

16 Background and Related Work
fixed-length frames; each frame is further divided into either scheduled time slotsfor collision-free transmission, or contention time slots for transmitting control mes-sages. Each node utilizes the contention time slots to send control messages to thebase station, including a list of its neighbours. The base station utilizes this list toconstruct a tree topology and minimum delay schedule for node transmissions byassigning the appropriate time slot and frequency channel. Although HyMAC guar-antees a certain end-to-end delay, there is no priority mechanism provided to enabletimely delivery of the critical data.
The authors in [46] introduced a hybrid TDMA/CSMA protocol, named ER-MAC, for emergency response in WSNs. Each nodes utilizes two queues for highand low priority traffic. In normal node, data transmissions are scheduled based onTDMA, where each node is assigned a time slot, while in emergency mode, the nodesthat are contributing in the emergency event utilize CSMA/CA to contend for accessto the TDMA slots after exchange request messages with the slot owner. However, asmentioned earlier, CSMA/CA is not a suitable approach for transmitting emergencymessages as it cannot provide the required predictable delay performance.
Zhang et al. [47] proposed a distributed dynamic packet scheduling algorithm,referred to D2-PaS, to handle critical events caused by external disturbances in real-time WSNs. In order to guarantee the delivery of the critical events by their dead-lines, the proposed scheduling algorithm forces the medium to be idle for a numberof consecutive time slots, which introduces a significant bandwidth wastage if thereis a large number of nodes. The authors in [48] presented the GinMAC protocol toprovide timely delivery for time-critical applications by using exclusive time slotsfor transmission. Since GinMAC mainly utilizes TDMA approach, it is unable toguarantee immediate channel access for emergency data and there is no mechanismprovided to prioritize channel access for critical-time data. Another drawback ofGinMAC is its limited scalability as it is designed to support a network with a max-imum of 25 nodes.
The concept of slot stealing is adopted by some works in order to improve thetransmission efficiency of acyclic traffic in WSNs [49–51]. Li et al. [49] proposed areal-time communication protocol to incorporate emergency alarms in WSNs. In theproposed protocol, emergency nodes are pre-assigned fixed time slots for emergencytraffic transmission and these slots can be stolen by regular nodes when there isno emergency. However, no analysis to derive the delay bound for the emergencytransmission is provided. The authors in [50] introduce a slot stealing strategy toguarantee real-time performance and reliability for mixed-criticality systems, wherehigh-critical flows are enabled to steal time slots from low-critical ones. The workhas been extended in [51] by introducing a series of algorithms to determine theoptimal path for the transmission of the unpredictable emergency events.
The authors in [52] presented a PriorityMAC protocol that considers four prioritylevels for data transmission. The proposed protocol provides timely access for thehighest priority data by hijacking the dedicated transmission bandwidth of the lowerpriority data. The channel access scheme utilized by the PriotiyMAC cannot providea deterministic channel access for time-critical data due to random delays caused bycollisions.

2.3 MAC Protocols in IWSNs 17
Furthermore, none of the above solutions define an efficient scheduling mecha-nism for channel access in case an emergency event triggers multiple sensor nodesto simultaneously send time-critical data to the controller with different deadlinebounds.
A novel MAC protocol, named WirArb, is proposed in [53] to enable determin-istic channel access for critical data in a fashion similar to the aforementioned CANprotocol. In the proposed protocol, each user is assigned a pre-defined arbitrationfrequency to deterministically prioritize channel access, which ensures that the userwith the lowest frequency gains immediate channel access. The proposed protocolis still in its early stages and needs a complete redefinition regarding the PHY layermodelling of the gateway and sensor nodes.
Motivated by the gaps identified in the above literature work, this thesis aims todevelop efficient MAC protocols to enable time- and mission-critical applications inIWSNs.

18
Chapter 3
Priority-Based Real-TimeCommunication in IWSNs
3.1 Overview
As discussed in the previous chapters, providing real-time communication fortime- and mission-critical applications is a fundamental research problem in the in-dustrial domain. This problem is approached in this work by proposing MAC proto-cols that enable a timely delivery of unpredictable critical traffic over the non-criticaltraffic through priority-based channel access schemes. The work started by mod-elling the effect of priority-based transmissions to evaluate the average delay perfor-mance in low and heavy traffic conditions. Then, two MAC protocols are to enabletimely and prioritized channel access of the critical traffic. The following sectionsdescribe approach proposed to achieve the research objective of this thesis.
3.2 Modelling Priority-Oriented Packet Transmissions
First, the effect of introducing priority transmission on the average delay per-formance in low as well as heavy traffic conditions is studied. The priority-basedtransmission is applied in the node level concept, i.e., each node utilizes two queuesin its output buffer, low priority queue and high priority queue, where each packetis placed in its corresponding queue based on its type. We developed a queuing-based two dimensional DTMC model. The developed 2D DTMC models the natureof a priority-based transmissions that is employed over a synchronous duty cyclingMAC protocol, S-MAC [38]. The two dimensions in the model correspond to numberof packets in a low priority queue and high priority queue. Furthermore, to modelthe number of active nodes in the network, a 1D DTMC is developed. The two mod-els are fused jointly to investigate the average delay in packet transmissions. Un-like existing models for synchronous DC MAC protocols in [54–56], the developed
19

20 Priority-Based Real-Time Communication in IWSNs
DTMC models embody the feature of priority aware packet transmissions.
Considering a network of N nodes, to compete for access to the medium, thecontending nodes generate random back-off time from the set {0,W − 1} during theactive period. The successful node is the one that selects the smallest back-off timeof the contending m, 0 ≤ m ≤ N − 1, active nodes. The successful probability can begiven as
Ps,m =
W−1∑i=0
(1/W ) (W − 1− i)m /Wm, (3.1)
A state in the 2D DTMC is represented by (i, k), where i is the number of packetsavailable in the low priority queue and k is the number of packets available in thehigh priority queue of a particular node. A node transmits low priority packetsonly if there are no high priority packets ready for transmission . Otherwise, highpriority packets would be transmitted. Considering that the arrival of high priorityand low priority packets to both queues follow a Poisson process, with rates λhp andλlp, respectively, then a transition in the 2D DTMC occurs based on the successfultransmission probability, λhp and λlp.
A packet, either low priority or high priority, will stay in the buffer until it issuccessfully deliverd. Hence, the delay is defined as the duration elapsed until thepacket is delivered after its entry into the buffer. According to Little’s law, the aver-age delay of a corresponding packet D, is given by
D =Navγa
, (3.2)
where Nav is the average number of packets present in a corresponding queue andγa is the rate at which the packets joins the queue. Nav can be formulated using thedeveloped 2D DTMC model as follows
Nav =
Q∑i=0
iπi, (3.3)
where πi is stationary distribution of the 2D DTMC. More details on the developedDTMC models can be found in Paper I.
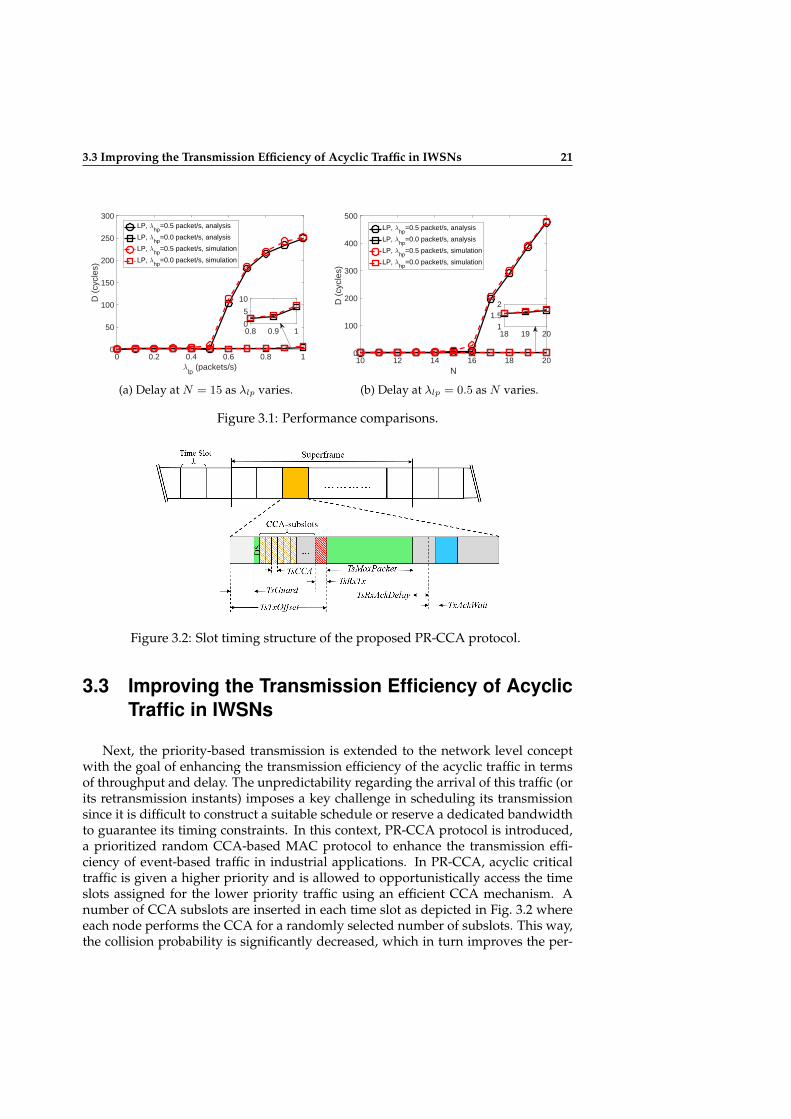
The priority-oriented packet transmission scheme along with the S-MAC proto-col is simulated in a discrete-event simulator to verify the analytical models. Further-more, the simulation results are averaged over 5 × 106 cycles. Apart from the goodmatching of the numerical and discrete-event simulation results shown in Fig. 3.1a, it can be observed that the non-emergency data experiences insignificant averagedelay in the absence of emergency traffic. When coexisting with high priority traf-fic, non-critical packets are delivered very late. Moreover, Fig. 3.1b shows the effectof the number of nodes N on the average delay. It can be seen that when the highpriority traffic is not considered, the delay in the non-critical traffic with growingN increases minimally. However, in the presence of high priority traffic togetherwith a higher access contention, the low priority packets rarely receive transmissionopportunities and thereby suffer from an extremely long delay.
3.3 Improving the Transmission Efficiency of Acyclic Traffic in IWSNs 21
0 0.2 0.4 0.6 0.8 1λ
lp (packets/s)
0
50
100
150
200
250
300
D (
cycl
es)
LP, λhp
=0.5 packet/s, analysis
LP, λhp
=0.0 packet/s, analysis
LP, λhp
=0.5 packet/s, simulation
LP, λhp
=0.0 packet/s, simulation
0.8 0.9 10
5
10
(a) Delay at N = 15 as λlp varies.
10 12 14 16 18 20N
0
100
200
300
400
500
D (
cycl
es)
LP, λhp
=0.5 packet/s, analysis
LP, λhp
=0.0 packet/s, analysis
LP, λhp
=0.5 packet/s, simulation
LP, λhp
=0.0 packet/s, simulation
18 19 201
1.52
(b) Delay at λlp = 0.5 as N varies.
Figure 3.1: Performance comparisons.
Figure 3.2: Slot timing structure of the proposed PR-CCA protocol.
3.3 Improving the Transmission Efficiency of AcyclicTraffic in IWSNs
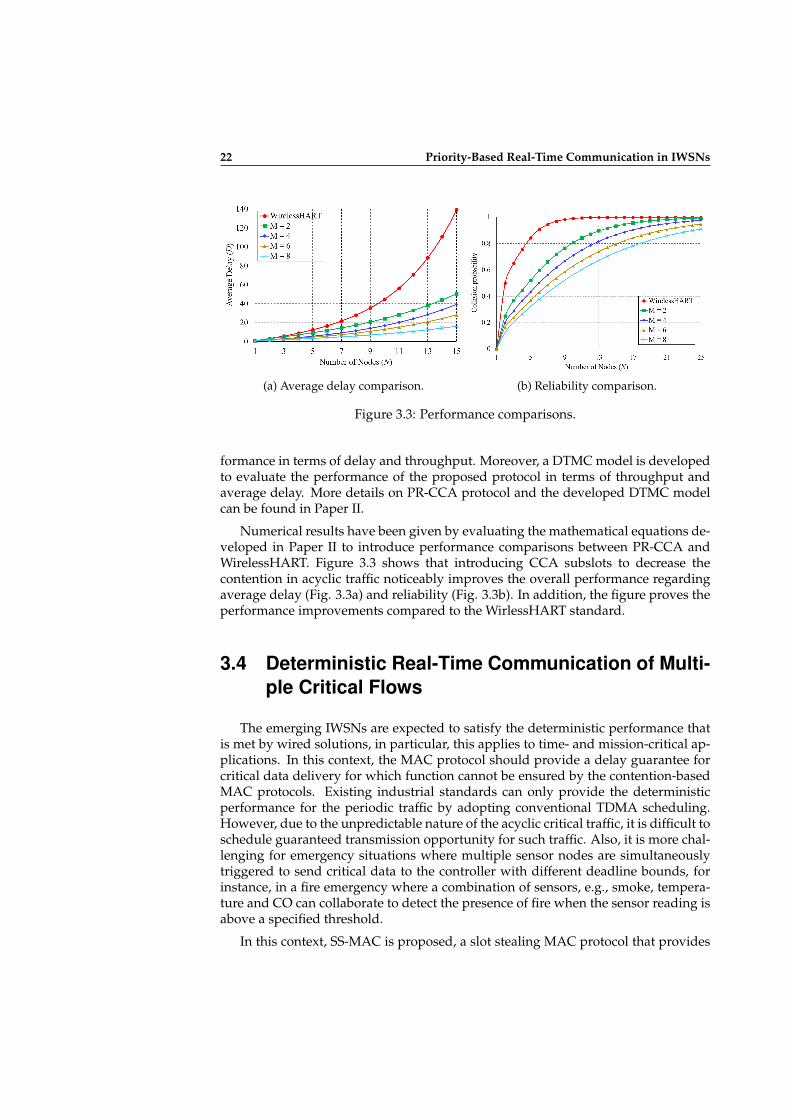
Next, the priority-based transmission is extended to the network level conceptwith the goal of enhancing the transmission efficiency of the acyclic traffic in termsof throughput and delay. The unpredictability regarding the arrival of this traffic (orits retransmission instants) imposes a key challenge in scheduling its transmissionsince it is difficult to construct a suitable schedule or reserve a dedicated bandwidthto guarantee its timing constraints. In this context, PR-CCA protocol is introduced,a prioritized random CCA-based MAC protocol to enhance the transmission effi-ciency of event-based traffic in industrial applications. In PR-CCA, acyclic criticaltraffic is given a higher priority and is allowed to opportunistically access the timeslots assigned for the lower priority traffic using an efficient CCA mechanism. Anumber of CCA subslots are inserted in each time slot as depicted in Fig. 3.2 whereeach node performs the CCA for a randomly selected number of subslots. This way,the collision probability is significantly decreased, which in turn improves the per-
22 Priority-Based Real-Time Communication in IWSNs
(a) Average delay comparison. (b) Reliability comparison.
Figure 3.3: Performance comparisons.
formance in terms of delay and throughput. Moreover, a DTMC model is developedto evaluate the performance of the proposed protocol in terms of throughput andaverage delay. More details on PR-CCA protocol and the developed DTMC modelcan be found in Paper II.
Numerical results have been given by evaluating the mathematical equations de-veloped in Paper II to introduce performance comparisons between PR-CCA andWirelessHART. Figure 3.3 shows that introducing CCA subslots to decrease thecontention in acyclic traffic noticeably improves the overall performance regardingaverage delay (Fig. 3.3a) and reliability (Fig. 3.3b). In addition, the figure proves theperformance improvements compared to the WirlessHART standard.
3.4 Deterministic Real-Time Communication of Multi-ple Critical Flows
The emerging IWSNs are expected to satisfy the deterministic performance thatis met by wired solutions, in particular, this applies to time- and mission-critical ap-plications. In this context, the MAC protocol should provide a delay guarantee forcritical data delivery for which function cannot be ensured by the contention-basedMAC protocols. Existing industrial standards can only provide the deterministicperformance for the periodic traffic by adopting conventional TDMA scheduling.However, due to the unpredictable nature of the acyclic critical traffic, it is difficult toschedule guaranteed transmission opportunity for such traffic. Also, it is more chal-lenging for emergency situations where multiple sensor nodes are simultaneouslytriggered to send critical data to the controller with different deadline bounds, forinstance, in a fire emergency where a combination of sensors, e.g., smoke, tempera-ture and CO can collaborate to detect the presence of fire when the sensor reading isabove a specified threshold.
In this context, SS-MAC is proposed, a slot stealing MAC protocol that provides
3.4 Deterministic Real-Time Communication of Multiple Critical Flows 23
Figure 3.4: SS-MAC channel access scenario.
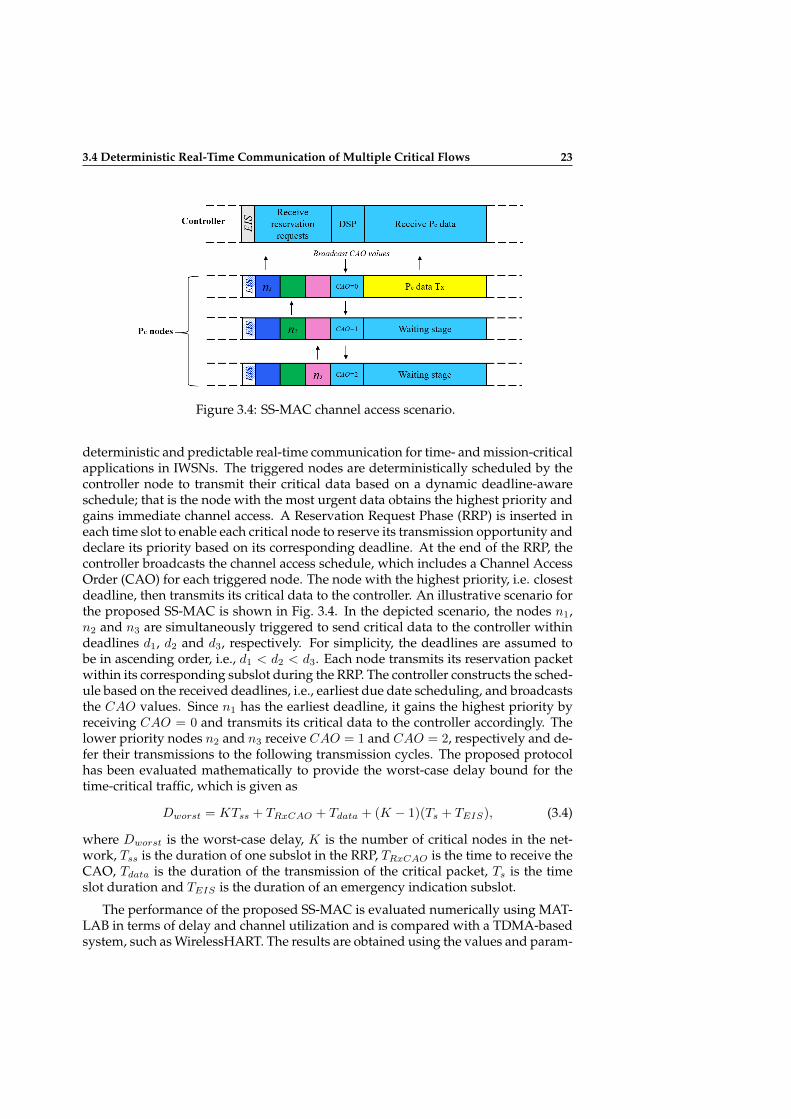
deterministic and predictable real-time communication for time- and mission-criticalapplications in IWSNs. The triggered nodes are deterministically scheduled by thecontroller node to transmit their critical data based on a dynamic deadline-awareschedule; that is the node with the most urgent data obtains the highest priority andgains immediate channel access. A Reservation Request Phase (RRP) is inserted ineach time slot to enable each critical node to reserve its transmission opportunity anddeclare its priority based on its corresponding deadline. At the end of the RRP, thecontroller broadcasts the channel access schedule, which includes a Channel AccessOrder (CAO) for each triggered node. The node with the highest priority, i.e. closestdeadline, then transmits its critical data to the controller. An illustrative scenario forthe proposed SS-MAC is shown in Fig. 3.4. In the depicted scenario, the nodes n1,n2 and n3 are simultaneously triggered to send critical data to the controller withindeadlines d1, d2 and d3, respectively. For simplicity, the deadlines are assumed tobe in ascending order, i.e., d1 < d2 < d3. Each node transmits its reservation packetwithin its corresponding subslot during the RRP. The controller constructs the sched-ule based on the received deadlines, i.e., earliest due date scheduling, and broadcaststhe CAO values. Since n1 has the earliest deadline, it gains the highest priority byreceiving CAO = 0 and transmits its critical data to the controller accordingly. Thelower priority nodes n2 and n3 receive CAO = 1 and CAO = 2, respectively and de-fer their transmissions to the following transmission cycles. The proposed protocolhas been evaluated mathematically to provide the worst-case delay bound for thetime-critical traffic, which is given as
Dworst = KTss + TRxCAO + Tdata + (K − 1)(Ts + TEIS), (3.4)
where Dworst is the worst-case delay, K is the number of critical nodes in the net-work, Tss is the duration of one subslot in the RRP, TRxCAO is the time to receive theCAO, Tdata is the duration of the transmission of the critical packet, Ts is the timeslot duration and TEIS is the duration of an emergency indication subslot.
The performance of the proposed SS-MAC is evaluated numerically using MAT-LAB in terms of delay and channel utilization and is compared with a TDMA-basedsystem, such as WirelessHART. The results are obtained using the values and param-

24 Priority-Based Real-Time Communication in IWSNs
Table 3.1: System Parameters [57].
Parameter Value
Transmission rate 250 kbpsTss 352 µsTRxCAO 640 µsTs 10 msTEIS 320 µsPHY header 192 µsMAC header 224 µs
eters listed in Table 3.1. Transmission rate, PHY header, and MAC header are mainlyadopted from the IEEE 802.15.4 standard. The value of TEIS is set according to theminimum time unit duration in the IEEE 802.15.4 standard, which equals to 320µs.Tss is set according to the considered size of the reservation request frame. The reser-vation request frame contains 2 bytes (frame control), 2 bytes (source address) and 1byte (payload). With 6 bytes (PHY header), Tss is calculated as
Tss =11 bytes× 8
250 kbps= 352 µs. (3.5)
TRxCAO in Table 3.1 is equivalent to the duration of the transmitted broadcast signalfrom the controller that contains a list of the CAO values. This can be viewed astransmitting the beacon frame in the IEEE 802.15.4 standard, which includes a fieldcontaining the information about the reserved GTS in the superframe. We assumethat the frame of the broadcast signal only contains a frame control field, and a pay-load field, which includes the list of the CAO values. Setting the size of the payloadfield to 12 bytes, which is reasonably sufficient compared to the GTS field in the bea-con frame of the IEEE 802.15.4 standard, and with 2 bytes (frame control) and 6 bytes(PHY header), then
TRxCAO =20 bytes× 8
250 kbps= 640 µs. (3.6)
The value of Ts is set in order to maintain compatibility with the WirelessHART timeslot duration, which is specified in the standard to equal 10 ms.
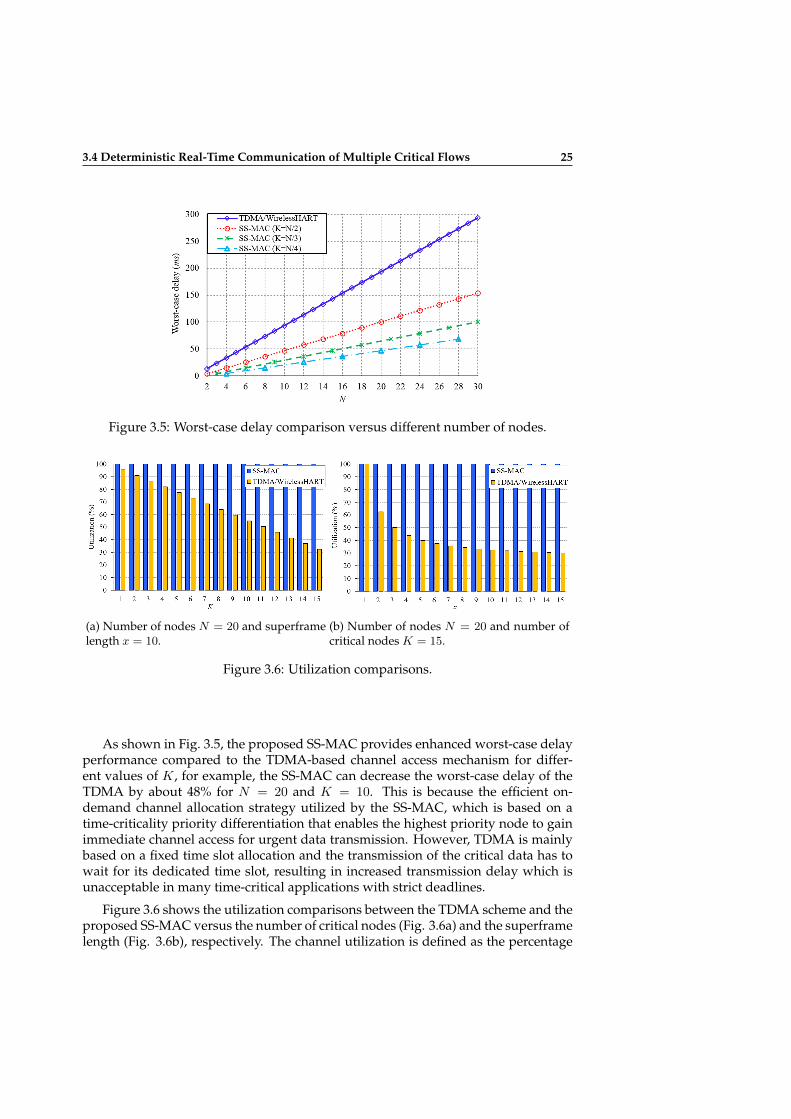
Figure 3.5 shows the worst-case delay comparisons of the critical traffic betweenthe proposed SS-MAC and a TDMA-based WSN such as WireleesHART under thedifferent values of the number of nodes. The worst-case delay for the proposedSS-MAC is evaluated under different values of the critical nodes K in the network,which are represented as a fraction of the total number of nodes N , e.g, K = N/2,N/3 and N/4 and the payload size of the critical packet is 100 bytes. For the TDMAsystem with a total of N nodes (N time slots), if the delay calculation is consideredfrom the boundary of the time slot, then the worst-case delay for a certain criticalnode can be given as
DTDMA worst = (N − 1)Ts + Tdata. (3.7)
3.4 Deterministic Real-Time Communication of Multiple Critical Flows 25
Figure 3.5: Worst-case delay comparison versus different number of nodes.
(a) Number of nodes N = 20 and superframelength x = 10.
(b) Number of nodes N = 20 and number ofcritical nodes K = 15.
Figure 3.6: Utilization comparisons.
As shown in Fig. 3.5, the proposed SS-MAC provides enhanced worst-case delayperformance compared to the TDMA-based channel access mechanism for differ-ent values of K, for example, the SS-MAC can decrease the worst-case delay of theTDMA by about 48% for N = 20 and K = 10. This is because the efficient on-demand channel allocation strategy utilized by the SS-MAC, which is based on atime-criticality priority differentiation that enables the highest priority node to gainimmediate channel access for urgent data transmission. However, TDMA is mainlybased on a fixed time slot allocation and the transmission of the critical data has towait for its dedicated time slot, resulting in increased transmission delay which isunacceptable in many time-critical applications with strict deadlines.
Figure 3.6 shows the utilization comparisons between the TDMA scheme and theproposed SS-MAC versus the number of critical nodes (Fig. 3.6a) and the superframelength (Fig. 3.6b), respectively. The channel utilization is defined as the percentage

26 Priority-Based Real-Time Communication in IWSNs
of the total number of transmissions per time slot in a superframe, which can beexpressed as follows
U =E[∑Ni=1 Si]
E[ST ], (3.8)
where Si represents the total number of transmissions by ni in the superframe andST is the total number of time slots in the superframe. These figures clearly showthat SS-MAC can achieve 100% channel utilization regardless of the number of crit-ical nodes or the length of the superframe. This is because of the dual-reservationmechanism utilized by the proposed SS-MAC, in which the time slots are alwaysfully exploited by either critical or non-critical data transmissions. However, theTDMA scheme provides poor channel utilization due to the fixed reservation of pe-riodic time slots for the critical transmissions, which occasionally occur and the per-formance is further degraded with the increase of the number of critical nodes andthe superframe size as more time slots are wasted. For example, while the proposedSS-MAC maintains a steady-full channel utilization as K or x increases from 1 to 15,the channel utilization in WirelessHART is degraded by 60%.
Chapter 4
Summary of Publications
This chapter summarizes the papers associated with this thesis and presentssome limitations that are not covered in the papers.
Paper I
Priority-Oriented Packet Transmissions in In-ternet of Things: Modeling and Delay Analysis
Motivation and ContributionsIn WSNs designed for smart cities or industrial applications, packets from surveil-
lance or monitoring services are sent regularly. In addition, critical detection oralarm packets are rarely generated in emergency situations. Control packets indi-cating emergencies need to be transmitted immediately to promote taking action be-fore events lead to a disaster. Therefore, a higher priority should be given to criticalpackets that are sensitive to delay while delay-tolerant messages can be transmittedwhen there is no time-critical traffic. To this end, the effect of traffic prioritizationneeds to be analysed for WSNs. This issue was highlighted by RQ1 and addressedby the work presented in Paper I.
In this paper we evaluate the performance of a priority-oriented packet trans-missions scheme with two priority levels, low priority and high priority, using twoassociated DTMC models. The developed 2D DTMC models the nature of a priority-based transmission scheme that is employed over a synchronous duty cycling MACprotocol, S-MAC. The two dimensions in the model correspond to the number ofpackets in a lower priority queue and a higher priority queue. Furthermore, to model
27

28 Summary of Publications
the number of active nodes in the network, a 1D DTMC is developed. These twoDTMC models are fused to investigate the effect of introducing priorities in packettransmissions in terms of average delay performance.
NoveltyThe idea of packet prioritization has been investigated in many works where a
particular packet is assigned a priority based on its delivery deadline. Unlike ex-isting models for synchronous duty cycling MAC protocols, in this work, the effectof introducing priorities in packet transmission is analysed using two DTMC mod-els that mathematically embody the priority feature to evaluate the network per-formance in terms of average delay. In addition, our models analyse the networkcharacteristics in both low as well as heavy traffic conditions.
LimitationsAlthough the proposed mechanism introduces lower latency for the higher pri-
ority packets compared to the lower priority ones, it cannot guarantee that a higherpriority packet is always transmitted first in the network scale sense, i.e., a node thathas a lower priority packet may win the contention while another node with a higherpriority packet fails and waits for the next time contention phase. Additionally, theanalytical model needs to be extended to formulate the worst-case delay of higherpriority packets.
Author ContributionHossam Farag contributed in the problem description, formulating the protocol
mechanism and paper writing.
Paper II
PR-CCA MAC: A Prioritized Random CCA MACProtocol for Mission-Critical IoT Applications
Motivation and ContributionsTypical control applications in the industrial automation domain includes acyclic
critical traffic, which is generated at unpredictable time instants as a result of a cer-tain observation of an established tendency, such as closed-loop supervisory traffic.This type of traffic is delay sensitive and if it arrives too late, it is of limited useand may cause degradation in the control system, economical loss, or even worse,

Summary of Publications 29
endanger human life. Due to its non-deterministic occurrence, scheduling the trans-missions of such traffic in a delay-efficient way and its prioritization over regulartraffic are key challenges in the design of IWSNs. Typical industrial standards suchas WirelessHART and ISA100.11a cannot handle the transmissions of such traffic inan efficient way. The aforementioned issue is raised in RQ2, which is investigated inPaper II.
In this paper, we propose a prioritized random CCA-based MAC protocol toenhance the transmission efficiency of acyclic traffic in industrial control applica-tions. In PR-CCA, acyclic critical traffic is given a higher priority and is allowedto opportunistically access the time slots assigned for lower priority traffic using anovel CCA mechanism. This way, the collision probability is significantly decreasedwhich in turn improves the performance in terms of latency and throughput. Wedevelop a DTMC model to evaluate the performance of the proposed protocol. Theresults show performance improvements of 80% and 190% of the expected delay andthroughput, respectively, compared with the WirelessHART standard along withbetter transmission reliability. In addition, the proposed PR-CCA protocol is compli-ant with the slot timing structure of WirelessHART.
NoveltyPR-CCA proposes a novel contention-based mechanism that significantly en-
hances the transmission/retransmission efficiency of acyclic control traffic in termsof both throughput and delay. Unlike the conventional fixed CCA mechanismadopted in most existing works, PR-CCA introduces a random selector for the CCAperiod, which mainly mitigates the collision probability of contending nodes, if noteliminated completely, when more than one node choose the same CCA slot to per-form channel sensing. The introduced CCA period can be inserted directly in TsTx-Offset, which makes PR-CCA easily compliant with the MAC of WirelessHART andISA100.11a.
LimitationsThe proposed protocol lacks simulation and/or real-world experiment evalua-
tions to further validate the theoretical analysis. In addition, the performance of theproposed work needs to be investigated under multi-hop scenarios and hidden-nodeproblem.
Author ContributionHossam Farag is the main author of this article and responsible for problem de-
scription, protocol idea and mathematical evaluations.
30 Summary of Publications
Paper III
A Delay-Bounded MAC Protocol for Mission-and Time-Critical Applications in Industrial Wire-less Sensor Networks
Motivation and ContributionsIWSNs designed for time- and mission-critical applications require timely and
deterministic data delivery within stringent deadline bounds. This means that thetransmission of critical traffic, such as safety-related data, should be characterizedby a deterministic delay bound. In addition, another vital challenge is consideredto schedule the transmissions in emergency situations where multiple sensor nodesare simultaneously triggered to send critical data to the controller within differentdeadline bounds. To this end, RQ3 is addressed in Paper III.
In this work, we propose SS-MAC, an efficient MAC protocol to guarantee de-terministic real-time communication for time-critical data in IWSNs. SS-MAC pri-oritizes the transmission of critical data by enabling a slot stealing mechanism, inwhich the aperiodic critical traffic opportunistically steals time slots assigned tothe periodic non-critical traffic. In addition, the triggered nodes are deterministi-cally scheduled by the controller node to transmit critical data based on a dynamicdeadline-aware schedule; that is, the node with the most urgent data (closest dead-line) obtains the highest priority and gains immediate channel access. The proposedprotocol is evaluated mathematically in terms of the transmission delay to give theupper bound for the worst-case delay. Furthermore, the performance of SS-MACis compared with TDMA-based WSNs such as WireleesHART and the results showthat the proposed protocol can provide a superior performance for time-critical ap-plications in terms of the worst-case delay and channel utilization.
NoveltyThe slot stealing mechanism has been addressed in many works in the literature,
however, SS-MAC introduces a number of novel features. First, SS-MAC enablesguaranteed channel access for critical traffic transmission by adopting a deadline-aware scheduling algorithm that ensures immediate channel access for the mosturgent node. Second, while most of the existing works consider scheduling onlya single critical flow at a time, SS-MAC deterministically schedules the transmis-sion of multiple critical nodes that are triggered simultaneously during a particularemergency situation. Third, SS-MAC guarantees the required deterministic perfor-mance in time- and mission-critical applications by providing an upper bound forthe worst-case delay of critical data, while previous works in the context of slot steal-ing mostly evaluate the performance in terms of the average delay and overlook theworst-case delay guarantee.

Summary of Publications 31
LimitationsThe number of emergency nodes that can be handled is the main limitation of the
proposed solution. Using SS-MAC in large scale networks is not efficient as it mayintroduce high latency for critical nodes. In addition, performance assessments un-der multi-hop scenarios and synchronization issues are not presented in this article.Also, the reliability of the proposed protocol under harsh channel conditions is notconsidered, which has a direct effect on the delay performance.
Author ContributionHossam Farag is the main author of this article and responsible for problem de-
scription, protocol idea and mathematical evaluations.

32
Chapter 5
Conclusions and Future Work
Existing industrial wireless standards within the PA domain are unable to sup-port time- and mission-critical applications due to their limited functionality to han-dle the delivery of the unpredictable critical traffic in a timely fashion. This thesisaims to address vital challenges in this context regarding providing real-time com-munication and service differentiation for medium access. This work contributeswith MAC-based solutions that can be integrated with existing industrial standardsto enable real-time communications in time- and mission-critical applications. Thefollowing section reviews the link between the identified research questions and thecontribution presented in this work.
5.1 Concluding Remarks
First, the issue of introducing service differentiation and how it affects the av-erage delay performance of the network is addressed by RQ1. In this context, inPaper I, the performance of priority-oriented packet transmissions in a duty-cycledMAC is analysed using two DTMC models. The developed DTMC models embodythe feature of priority aware packet transmissions to evaluate the average delay per-formance in low and heavy traffic conditions. The analytical results are verifiedthrough discrete-event simulations to prove the accuracy of the models as well asevaluate the behaviour of priority-based packet transmissions.
In order to further improve the transmission efficiency of acyclic critical data incontrol applications, a PR-CCA protocol is proposed and formalized in Paper II withthe goal to address the challenges raised in RQ2. PR-CCA introduces a priority-based random CCA mechanism to handle the simultaneous transmissions of acycliccritical data and reduce the collision probability between the contending nodes. Theperformance of the proposed approach is evaluated using a DTMC model and theobtained results show that the proposed protocol can achieve significant improve-ments regarding the expected delay and throughput compared with the
33

34 Conclusions and Future Work
WirelessHART standard along with better transmission reliability.
For critical applications that are characterized by strict deadlines, bounded andguaranteed delay performance is a must. It also becomes more challenging whenmultiple nodes are simultaneously triggered to transmit critical data to the sink. Theaforementioned challenges are addressed in RQ3 and the corresponding solutionis proposed in Paper III through the SS-MAC protocol. SS-MAC presents a slot-stealing MAC protocol to handle critical data communications in emergency andsafety-related situations. The triggered critical nodes are deterministically scheduledby the controller node to transmit their critical data based on a dynamic deadline-aware schedule; that is, the node with the most urgent data obtains the highestpriority and gains immediate channel access. SS-MAC provides a deterministic de-lay guarantee performance and the obtained numerical results demonstrate that SS-MAC attains better performance in terms of the worst-case delay and channel uti-lization than TDMA-based WSNs.
5.2 Ethical and Societal Considerations
Safety of humans and environment is an important ethical issue related to thiswork. Failing to satisfy the stringent timing and reliability requirements of safety-critical functions can result in dangerous consequences. Stringent regulations forhealth, safety, and the environment are now being enforced in many countries. Theseregulations require continuous monitoring of safety for workers at a plant so thathelp can be dispatched on time to prevent disastrous consequences that could en-danger human lives, e.g., fire, explosion, leakage of poisonous gases. Moreover,security and privacy are legitimate concerns for IWSNs as wireless systems are vul-nerable to cyber threats. Attacks such as, denial-of-service, eavesdropping and radiointerference can adversely affect the operation of the IWSN. Such attacks cause mul-tiple disturbances to the network, e.g., loss of packets, jamming the channel, mod-ifying the network packets and/or inserting false packets into the network, whichwill eventually degrade the reliability of the network.
Moreover, as a societal effect, the ubiquity of IWSNs technology everywhere inour surroundings has been a trigger for revolutionary applications that are beneficialfor individuals, cooperations and governments. New jobs, industries, and economicmodels will emerge, and daily life will be changed in profound ways, allowing hu-mans and machines to interact in unprecedented and unanticipated ways, or evenreplace the human workforce. This rise of workplace automation in its many formshas the potential to vastly improve productivity and augment the work of humanemployees. Automation technology can help remove the burden of repetitive ad-ministrative work and enable employees to focus on solving more complex issueswhile reducing the risk of error and allowing them to focus on value-added tasks.However, as a side effect, this could lead to displace workers from specific tasks thathave been automated as a result of current and presumed technological advances.

5.3 Future Work 35
5.3 Future Work
Possible future investigations can be considered to handle the limitations asso-ciated with the proposed protocols. In PR-CCA, an efficient cross-layer schedulingmethod can be implemented to extend the work for multi-hop scenarios and evalu-ate the performance under the specifications of a real-world industrial applications,e.g., welder machine and plastic machinery. Furthermore, the effect of timing mis-alignment between the nodes should be considered, which will be more challengingfor mesh networks, hence novel synchronization methods can be applied. For SS-MAC, the performance can be further investigated under realistic arrival models ofthe critical traffic. The proposed deadline-aware scheduling can be improved byintegrating an efficient acceptance test that guarantees that all the scheduled trans-missions meet their deadlines. In addition, novel routing algorithms can be inte-grated with SS-MAC in order to provide a deterministic delivery of the critical datain multi-hop scenarios.
Moreover, recent promising technologies such as cognitive radio can be inte-grated with IWSNs to form an intelligent framework that can adapt the networkperformance in an efficient way to meet the strict requirements of time- and missioncritical applications.

36
Bibliography
[1] J. Lu, H. Okada, T. Itoh, T. Harada, and R. Maeda, “Toward the world smallestwireless sensor nodes with ultralow power consumption,” IEEE Sensors Journal,vol. 14, no. 6, pp. 2035–2041, Jun. 2014.
[2] V. C. Gungor and F. C. Lambert, “A survey on communication networks forelectric system automation,” Comput. Netw., vol. 50, no. 6, pp. 877–897, May2006.
[3] P. Pleinevaux and J. D. Decotignie, “Time critical communication networks:field buses,” IEEE Netw., vol. 2, no. 3, pp. 55–63, May 1988.
[4] U. Jecht, W. Stripf, and P. Wenzel, “Innovation and intellectual property rights,”in The Industrial Information Technology Handbook, R. Zurawski, Ed. Florida:CRC, 2005.
[5] L. Palopoli, R. Passerone, and T. Rizano, “Scalable offline optimization of in-dustrial wireless sensor networks,” IEEE Trans. Ind. Informat., vol. 7, no. 2, pp.328–339, May 2011.
[6] G. Cena and A. Valenzan, Operating principles and features of CAN. Florida:CRC, 2005.
[7] J. Blaney, “Wireless proves its value,” Power Engineering, 2009.
[8] M. Raza, N. Aslam, H. Le-Minh, S. Hussain, Y. Cao, and N. M. Khan, “A criti-cal analysis of research potential, challenges, and future directives in industrialwireless sensor networks,” IEEE Commun. Surveys Tuts., vol. 20, no. 1, pp. 39–95,Firstquarter 2018.
[9] D. Chen, M. Nixon, and A. Mok, WirelessHART-Real Time Mesh Networks for In-dustrial Automation. New York: Springer, 2010.
[10] Q. Wang and J. Jiang, “Comparative examination on architecture and proto-col of industrial wireless sensor network standards,” IEEE Commun. Surv. Tuts.,vol. 18, no. 3, pp. 2197–2219, 3rd Quarter 2016.
[11] Z. Alliance, “Zigbee specification,” Zigbee Document 053474r13, 2008.
37
38 BIBLIOGRAPHY
[12] S. Petersen and S. Carlsen, “WirelessHART Versus ISA100.11a: The Format WarHits the Factory Floor,” IEEE Ind. Electron. Mag., vol. 5, no. 4, pp. 23–34, Dec.2011.
[13] J. Akerberg, F. Reichenbach, M. Gidlund, and M. Bjorkman, “Measurements onan industrial wirelessHART network supporting PROFIsafe: A case study,” inProc. IEEE 16th Conf. Emerg. Technol. Factory Autom. (ETFA 2011), Sept. 2011, pp.1–8.
[14] M. Wei and K. Kim, “Intrusion detection scheme using traffic prediction forwireless industrial networks,” J. Commun. Netw., vol. 14, no. 3, pp. 310–318, Jun.2012.
[15] IEEE Standard for Local and Metropolitan Area Networks-PART 15.4: Low-Rate Wire-less Personal Area Networks (LR-WPANs) Amendment 1: MAC Sublayer. IEEE Std802.15.4e, 2012.
[16] R. T. Hermeto, A. Gallais, and F. Theoleyre, “Scheduling for IEEE 802.15.4-TSCH and slow channel hopping MAC in low power industrial wireless net-works: A survey,” Comput. Commun., vol. 114, no. 13, pp. 84–105, Dec. 2017.
[17] L. M. Borges, F. J. Velez, and A. S. Lebres, “Survey on the characterization andclassification of wireless sensor network applications,” IEEE Commun. SurveysTuts., vol. 16, no. 4, pp. 1860–1890, Nov. 2014.
[18] B. Glisic, “Performance and health monitoring of civil structures and infrastruc-ture using long-gauge and distributed fiber optic sensors,” in 2016 18th Interna-tional Conference on Transparent Optical Networks (ICTON), Jul. 2016, pp. 1–4.
[19] V. Sharma and S. Sharma, “Low energy consumption based patient health mon-itoring by leach protocol,” in 2017 International Conference on Inventive Systemsand Control (ICISC), Jan. 2017, pp. 1–4.
[20] F. Tashtarian, A. Montazerolghaem, and M. Abbasi, “Distributed lifetime opti-mization of wireless sensor networks in smart grid,” in 2018 IEEE InternationalConference on Smart Energy Grid Engineering (SEGE), Aug. 2018, pp. 240–243.
[21] J. M. N. V., F. F. R., and Y. M. Q. L., “Design and implementation of wsn for preci-sion agriculture in white cabbage crops,” in 2017 IEEE XXIV International Con-ference on Electronics, Electrical Engineering and Computing (INTERCON), Aug.2017, pp. 1–4.
[22] J. Aponte-Luis, J. A. Gomez-Galan, F. Gomez-Bravo, M. Snchez-Raya, J. Alcina-Espigado, Teixido-Rovira, and P. Miguel, “An efficient wireless sensor networkfor industrial monitoring and control,” Sensors, vol. 18, no. 1, 2018.
[23] J. Akerberg, M. Gidlund, and M. Bjorkman, “Future research challenges in wire-less sensor and actuator networks targeting industrial automation,” in Proc. 9th
IEEE Int. Conf. on Ind. Informat (INDIN 2011), Jul. 2011, pp. 410–415.
BIBLIOGRAPHY 39
[24] P. Suriyachai, U. Roedig, and A. Scott, “A Survey of MAC Protocols for Mission-Critical Applications in Wireless Sensor Networks,” IEEE Commun. SurveysTuts., vol. 14, no. 2, pp. 240–264, May 2012.
[25] F. Barac, M. Gidlund, and T. Zhang, “Scrutinizing bit- and symbol-errors ofieee 802.15.4 communication in industrial environments,” IEEE Trans. Instrum.Meas., vol. 63, no. 7, pp. 1783–1794, Jul. 2014.
[26] Y. Zou and G. Wang, “Intercept behavior analysis of industrial wireless sensornetworks in the presence of eavesdropping attack,” IEEE Trans. Ind. Informat.,vol. 12, no. 2, pp. 780–787, Apr. 2016.
[27] M. Bertocco, G. Gamba, A. Sona, and S. Vitturi, “Experimental characterizationof wireless sensor networks for industrial applications,” IEEE Trans. on Instrum.and Meas., vol. 57, no. 8, pp. 1537–1546, Aug. 2008.
[28] C. M. G. Algora, V. A. Reguera, E. M. G. FernA¡ndez, and K. Steenhaut, “Paral-lel rendezvous-based association for ieee 802.15.4 tsch networks,” IEEE SensorsJournal, vol. 18, no. 21, pp. 9005–9020, Nov. 2018.
[29] A. A. K. Somappa, K. O. vsthus, and L. M. Kristensen, “An industrial perspec-tive on wireless sensor networks: A survey of requirements, protocols, and chal-lenges,” IEEE Communications Surveys Tutorials, vol. 16, no. 3, pp. 1391–1412,Third 2014.
[30] D. D. Guglielmo, S. Brienza, and G. Anastasi, “Ieee 802.15.4e: A survey,” J.Comput. Commun., vol. 88, pp. 1–24, Aug. 2016.
[31] P. Thubert, T. Watteyne, M. R. Palattella, X. Vilajosana, and Q. Wang, “IETF6TSCH: Combining IPV6 connectivity with industrial performance,” in Proc.7th Int. Conf. Innov. Mobile Internet Serv. Ubiq. Comput., Sept. 2013, pp. 541–546.
[32] H. Karl and A. Willig, Protocols and Architectures for Wireless Sensor Networks.JohnWiley & Sons Ltd, 2005.
[33] I. Rhee, A. Warrier, M. Aia, J. Min, and M. L. Sichitiu, “Z-MAC: A hybrid MACfor wireless sensor networks,” IEEE/ACM Trans. on Netw., vol. 16, no. 3, pp.511–524, Jun. 2008.
[34] L. Ascorti, S. Savazzi, and S. Galimberti, “Cloud-based wirelessHART network-ing for critical industrial monitoring and control,” in Proc. 12th IEEE Int. Conf.on Ind. Informat. (INDIN 2014), Jul. 2014, pp. 362–369.
[35] M. Khanafer, M. Guennoun, and H. T. Mouftah, “A survey of beacon-enabledIEEE 802.15.4 MAC protocols in wireless sensor networks,” IEEE Commun. Sur-veys Tuts., vol. 16, no. 2, pp. 856–876, 2nd Quarter 2014.
[36] ”Wireless Medium Access Control and Physical Layer Specification for Low Rate Wire-less Personal Area Networks”. IEEE 802.15.4 Standard, 2006.
40 BIBLIOGRAPHY
[37] J. Ploennigs, V. Vasyutynskyy, and K. Kabitzsch, “Comparative study of energy-efficient sampling approaches for wireless control networks,” IEEE Trans. Ind.Informat., vol. 6, no. 3, pp. 416–424, Aug. 2010.
[38] J. Lin and M. A. Weitnauer, “Range extension cooperative mac to attack energyhole in duty-cycled multi-hop wsns,” Wireless Networks, vol. 24, no. 5, pp. 1419–1437, Jul. 2018.
[39] K. Yu, M. Gidlund, J. Akerberg, and M. Bjorkman, “Performance evaluationsand measurements of the REALFLOW routing protocol in wireless industrialnetworks,” IEEE Trans. Ind. Informat., vol. 13, no. 3, pp. 1410–1420, Jun. 2017.
[40] Y. K. Huang, A. C. Pang, and H. N. Hung, “An adaptive GTS allocation schemefor IEEE 802.15.4,” IEEE Trans. Parallel Distrib. Syst., vol. 19, no. 5, pp. 641–651,May 2008.
[41] A. Koubaa, M. Alves, E. Tovar, and A. Cunha, “An implicit GTS allocationmechanism in ieee 802.15.4 for time-sensitive wireless sensor networks: The-ory and practice,” Real-Time Syst., vol. 39, no. 1-3, pp. 169–204, Aug. 2008.
[42] S. e. Yoo, P. K. Chong, D. Kim, Y. Doh, M. L. Pham, E. Choi, and J. Huh, “Guar-anteeing real-time Services for industrial wireless sensor networks with IEEE802.15.4,” IEEE Trans. on Ind. Electron., vol. 57, no. 11, pp. 3868–3876, Nov. 2010.
[43] L. Leonardi, G. Patti, F. Battaglia, and L. L. Bello, “Simulative assessments of theIEEE 802.15.4 CSMA/CA with priority channel access in structural health mon-itoring scenarios,” in Proc. IEEE 15th Int. Conf. on Ind. Informat. (INDIN 2017), jul.2017, pp. 375–380.
[44] G. Patti and L. L. Bello, “A priority-aware multichannel adaptive frameworkfor the IEEE 802.15.4e-LLDN,” IEEE Trans. on Ind. Electron., vol. 63, no. 10, pp.6360–6370, Oct. 2016.
[45] M. Salajegheh, H. Soroush, and A. Kalis, “HyMAC: Hybrid TDMA/FDMAmedium access control protocol for wireless sensor networks,” in Proc. IEEE18th Int. Symp. on Personal, Indoor and Mobile Radio Commun. (PIMRC 2007), Sept.2007, pp. 1–5.
[46] L. Sitanayah, C. J. Sreenan, and K. N. Brown, “A hybrid MAC protocol for emer-gency response wireless sensor networks,” Ad Hoc Netw., vol. 20, no. 9, pp. 77–95, Sept. 2014.
[47] T. Zhang, T. Gong, C. Gu, H. Ji, S. Han, Q. Deng, and X. S. Hu, “Distributeddynamic packet scheduling for handling disturbances in real-time wireless net-works,” in Proc. IEEE Real-Time and Embedded Technol. and Appl. Symp. (RTAS2017), Apr. 2017, pp. 261–272.
[48] P. Suriyachai, J. Brown, and U. Roedig, “Time-critical data delivery in wirelesssensor networks,” in Proc. 6th IEEE Int. Conf. Distrib. Comput. in Sensor Syst.,2010, pp. 216–229.

BIBLIOGRAPHY 41
[49] B. Li, L. Nie, C. Wu, H. Gonzalez, and C. Lu, “Incorporating emergency alarmsin reliable wireless process control,” in Proc. ACM/IEEE Int. Conf. Cyber-Phys.Syst. (ICCPS 2015), Apr. 2015, pp. 218–227.
[50] X. Jin, C. Xia, H. Xu, L. Kong, and P. Zeng, “Mixed criticality Scheduling forindustrial wireless sensor networks,” Sensors, vol. 16, no. 9, Aug. 2016.
[51] C. Xia, X. Jin, L. Kong, and P. Zeng, “Scheduling for emergency tasks in indus-trial wireless sensor networks,” Sensors, vol. 17, no. 7, Jul. 2017.
[52] W. Shen, T. Zhang, F. Barac, and M. Gidlund, “PriorityMAC: A priority-enhanced MAC protocol for critical traffic in industrial wireless sensor and ac-tuator networks,” IEEE Trans. on Ind. Informat., vol. 10, no. 1, pp. 824–835, Feb.2014.
[53] T. Zheng, M. Gidlund, and J. Akerberg, “WirArb: A new MAC protocol for timecritical industrial wireless sensor network applications,” IEEE Sensors J., vol. 16,no. 7, pp. 2127–2139, Apr. 2016.
[54] L. Guntupalli, F. Y. Li, and J. Martinez-Bauset, “Event-triggered sleeping forsynchronous dc mac in wsns: Mechanism and dtmc modeling,” in 2016 IEEEGlobal Communications Conference (GLOBECOM), Dec. 2016, pp. 1–6.
[55] L. Guntupalli and F. Y. Li, “Dtmc modeling for performance evaluation of dw-mac in wireless sensor networks,” in 2016 IEEE Wireless Communications andNetworking Conference, Apr. 2016, pp. 1–6.
[56] J. Martinez-Bauset, L. Guntupalli, and F. Y. Li, “Performance analysis of syn-chronous duty-cycled mac protocols,” IEEE Wireless Communications Letters,vol. 4, no. 5, pp. 469–472, Oct. 2015.
[57] I. Ramachandran, A. K. Das, and S. Roy, “Analysis of the contention accessperiod of ieee 802.15.4 mac,” ACM Trans. Sen. Netw., vol. 3, no. 1, Mar. 2007.

42