Embed Size (px)
Citation preview

EN530.603 Applied Optimal Control
Lecture 2: Unconstrained Optimization Basics
September 1, 2021
Lecturer: Marin Kobilarov
1 Optimality Conditions
• Find the value of x ∈ Rn which minimizes f(x)
• We will generally assume that f is at least twice-differentiable
• Local and Global Minima
Strict Local Minimum Local Minima Strict Global Minimum
f(x)
x
• Small variations ∆x yield a cost variation (using a Taylor’s series expansion)
f(x∗ + ∆x)− f(x∗) ≈ ∇f(x∗)T∆x ≥ 0,
to first order, or two second order:
f(x∗ + ∆x)− f(x∗) ≈ ∇f(x∗)T∆x+1
2∆xT∇2f(x∗)∆x ≥ 0,
• Then ∇f(x∗)∆x ≥ 0 for arbitrary ∆x ⇒ ∇f = 0
• Then ∇f = 0 ⇒ 12∆xT∇2f(x∗)∆x ≥ 0 for arbitrary ∆x ⇒ ∇2f(x∗) ≥ 0
Proposition 1. (Necessary Optimality Conditions) [1] Let x∗ be an unconstrained localminimum of f : Rn → R that it is continuously differentiable in a set S containing x∗. Then
∇f = 0 (First-order Necessary Conditions)
If in addition, f is twice-differentiable within S then
∇2f ≥ 0 : positive semidefinite (Second-order Necessary Conditions)
1

Proof: Let d ∈ Rn and examine the change of the function f(x + αd) with respect to thescalar α
0 ≤ limα→0
f(x∗ + αd)− f(x∗)
α= ∇f(x∗)Td,
The same must hold if we replace d by −d, i.e.
0 ≤ −∇f(x∗)Td ⇒ ∇f(u)Td ≤ 0,
for all d which is only possible if ∇f(u) = 0.
The second-order Taylor expansion is
f(x∗ + αd)− f(x∗) = α∇f(x∗)d+α2
2dT∇2f(x∗)d+ o(α2)
Using ∇f(x∗) = 0 we have
0 ≤ limα→0
f(x∗ + αd)− f(x∗)
α2=
1
2dT∇2f(x∗)d,
hence ∇2f must be positive semidefinite.
Note: small-o notation means that o(g(x)) goes to zero faster than g(x), i.e. limg(x)→0o(g(x))g(x) =
0
Proposition 2. (Second Order Sufficient Optimality Conditions) Let f : Rn → R betwice continuously differentiable in an open set S. Suppose that a vector x∗ ∈ S satisfies theconditions
∇f(x∗) = 0, ∇2f(x∗) > 0 : positive definite
Then, x∗ is a strict unconstrained local minimum of f . In particular, there exist scalars γ > 0and ε > 0 such that
f(x) ≥ f(x∗) +γ
2‖x− x∗‖2, ∀x with ‖x− x∗‖ ≤ ε.
Proof: Let λ be the smallest eigenvalue of ∇2f(x∗) then we have
dT∇2f(x∗)d ≥ λ‖d‖2 for all d ∈ Rm,
The Taylor expansion, and using the fact that ∇f(x∗) = 0
f(x∗ + d)− f(x∗) = ∇f(x∗)d+1
2dT∇2f(x∗)d+ o(‖d‖2)
≥ λ
2‖d‖2 + o(‖d‖2)
=
(λ
2+o(‖d‖2)‖d‖2
)‖d‖2.
This is satisfied for any ε > 0 and γ > 0 such that
λ
2+o(‖d‖2)‖d‖2
≥ γ
2, ∀d with ‖d‖ ≤ ε.
2

1.1 Examples
• Convex function with strict minimum
f(x) =1
2xT[
1 −1−1 4
]x
The critical point is the origin x = (0, 0), while the Hessian is
∇2f =
[1 −1−1 4
]and has eigenvalues λ1 ≈ 0.70 and λ2 ≈ 4.30 corresponding to eigenvectors v1 ≈ (−0.96,−0.29)and v2 ≈ (−0.29, 0.96).
−5
0
5
−5
0
5
0
20
40
60
80
100
120
140
160
180
• Saddlepoint: one positive eigenvalue and one negative
f(x) =1
2xT[−1 11 3
]x
The Hessian ∇2f is constant and has eigenvalues λ1 ≈ −1.24 and λ2 ≈ 3.24 correspondingto eigenvectors v1 ≈ (−0.97, 0.23) and v2 ≈ (0.23, 0.97).
3
−5
0
5
−5
0
5
−40
−20
0
20
40
60
80
100
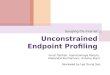
• Singular point: one positive eigenvalue and one zero eigenvalue
f(x) = (x1 − x22)(x1 − 3x22)
−5
0
5
−5
0
5
−200
0
200
400
600
800
1000
1200
1400
1600
1800
The gradient is
∇f(x) =
[2x1 − 4x22
−8x1x2 + 12x32
]and the Hessian is
∇2f(x) =
[2 −8x2−8x2 −8x1 + 36x22
]The first-order necessary condition gives the critical point x∗ = (0, 0) but we cannot determinewhether that is a strict local minimum since the Hessian is singular at x∗, i.e. it has eigenvaluesλ1 = 2 and λ2 = 0 corresponding to eigenvectors v1 = (1, 0) and v2 = (0, 1).
4

• a complicated function with multiple local minima
2 Numerical Solution: gradient-based methods
In general, optimality conditions for general nonlinear functions cannot be solved in closed-form.It is necessary to use an iterative procedure starting with some initial guess x = x0, i.e.
xk+1 = xk + αkdk, k = 0, 1, . . .
until f(xk) converges. Here dk ∈ Rn is called the descent direction (or more generally “searchdirection”) and αk > 0 is called the stepsize. The most common methods for finding αk and dk aregradient-based. Some use only first-order information (the gradient only) while other additionallyuse higher-order (gradient and Hessian) information.
• Gradient-based methods follow the general guidelines:
1. Choose direction dk so that whenever ∇f(xk) 6= 0 we have
∇f(xk)Tdk < 0,
i.e. the direction and negative gradient make an angle < 90◦
2. Choose stepsize αk > 0 so that
f(xk + αdk) < f(xk),
i.e. cost decreases
• Cost reduction is guaranteed (assuming ∇f(xk) 6= 0) since we have
f(xk+1) = f(xk) + αk∇f(xk)Tdk + o(αk)
and there always exist αk small enough so that
αk∇f(xk)Tdk + o(αk) < 0.
5

2.1 Selecting Descent Direction d
Descent direction choices
• Many gradient methods are specified in the form
xk+1 = xk − αkDk∇f(xk),
where Dk is positive definite symmetric matrix.
• Since dk = −Dk∇f(xk) and Dk > 0 the descent condition
−∇f(xk)TDk∇f(xk) < 0,
is satisfied.
We have the following general methods:
Steepest Descent
Dk = I, k = 0, 1, . . . ,
where I is the identity matrix. We have
∇f(xk)Tdk = −‖∇f(xk)‖2 < 0, when ∇f(xk) 6= 0
Furthermore, the direction ∇f(xk) results in the fastest decrease of f at α = 0 (i.e. near xk).
Newton’s Method
Dk = [∂2f(xk)]−1, k = 0, 1, . . . ,
provided that ∂2f(xk) > 0.
• The idea behind Newton’s method is to minimize a quadratic approximation of f around xk
fk(x) = f(xk) +∇f(xk)T (x− xk) +1
2(x− xk)T∇2f(xk)(x− xk),
and solve the condition ∇fk(x) = 0
• This is equivalent to∇f(xk) +∇2f(xk)(x− xk) = 0
and results in the Newton iteration
xk+1 = xk − [∇2f(xk)]−1∇f(xk)
6

Diagonally Scaled Steepest Descent
Dk =
dk1 0 0 · · · 0 0 00 dk2 0 · · · 0 0 0...
......
. . ....
...0 0 0 · · · 0 dkn−1 00 0 0 · · · 0 0 dkn
≡ diag([dk1, · · · , dkn]),
for some dki > 0. Usually these are the inverted diagonal elements of the hessian ∇2f , i.e.
dki =
[∂2f(xk)
(∂xi)2
]−1, k = 0, 1, . . . ,
Gauss-Newton Method
When the cost has a special least squares form
f(x) =1
2‖g(x)‖2 =
1
2
m∑i=1
(gi(x))2
we can choose
Dk =[∇g(xk)∇g(xk)T
]−1, k = 0, 1, . . .
Conjugate-Gradient Methods
Idea is to choose linearly independent (i.e. conjugate) search directions dk at each iteration. Forquadratic problems convergence is guaranteed by at most n iterations. Since there are at most nindependent directions, the independence condition is typically reset every k ≤ n steps for generalnonlinear problems.
The directions are computed according to
dk = −∇f(xk) + βkdk−1.
The most common way to compute βk is
βk =∇f(xk)T
(∇f(xk)−∇f(xk−1)
)∇f(xk−1)T∇f(xk−1)
It is possible to show that the choice βk ensures the conjugacy condition.
2.2 Selecting Stepsize α
• Minimization Rule: choose αk ∈ [0, s] so that f is minimized, i.e.
f(xk + αkdk) = minα∈[0,s]
f(xk + αdk)
which typically involves a one-dimensional optimization (i.e. a line-search) over [0, s].
7

• Successive Stepsize Reduction - Armijo Rule: idea is to start with initial stepsize s and ifxk + sdk does not improve cost then s is reduced:
Choose: s > 0, 0 < β < 1, 0 < σ < 1
Increase: m = 0, 1, ...
Until: f(xk)− f(xk + βmsdk) ≥ −σβms∇f(xk)Tdk
where β is the rate of decrease (e.g. β = .25) and σ is the acceptance ratio (e.g. σ = .01).
• Constant Stepsize: use a fixed step-size s > 0
αk = s, k = 0, 1, . . .
while simple it can be problematic: too large step-size can result in divergence; too small inslow convergence
• Diminishing Stepsize: use a stepsize converging to 0
αk → 0
under a condition∑∞
k=0 αk =∞, xk will converge theoretically but in practice is slow.
2.3 Example
• Consider the function f : R2 → R
f(x) = x1 exp(−(x21 + x22)) + (x21 + x22)/20
The gradient and Hessian are
∇f(x) =
[x1/10 + exp(−x21 − x22)(1− 2x21)x2/10− 2x1x2 exp(−x21 − x22)
],
∇2f(x) =
[(4x31 − 6x1) exp(−x21 − x22) + 1/10 (4x21x2 − 2x2) exp(−x12 − x22)
(4x21x2 − 2x2) exp(−x21 − x22) (4x1x22 − 2x1) exp(−x21 − x22) + 1/10
].
−2
−1
0
1
2
−2
−1
0
1
2−0.5
0
0.5
x1
x1 exp(−x
1
2−x
2
2)+...+x
2
2 (1.0/2.0e1)
x2
8

• The function has a strict global minimum around x∗ = (−2/3, 0) but also local minima
• There are also saddle points around x = (1, 1.5)
• We compare gradient-method (blue) and Newton method (magenta)
– Gradient converges (but takes many steps); ∇2f is not p.d. and Newton get stuck
x1
x2
x1 exp(− x
1
2 − x
2
2) + x
1
2/20 + x
2
2/20
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
– Both methods converge if started near optimum; gradient zigzags
x1
x2
x1 exp(− x
1
2 − x
2
2) + x
1
2/20 + x
2
2/20
−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0
−0.5
0
0.5
1
– Newton’s methods with regularization (trust-region) now works
9
x1
x2
x1 exp(− x
1
2 − x
2
2) + x
1
2/20 + x
2
2/20
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
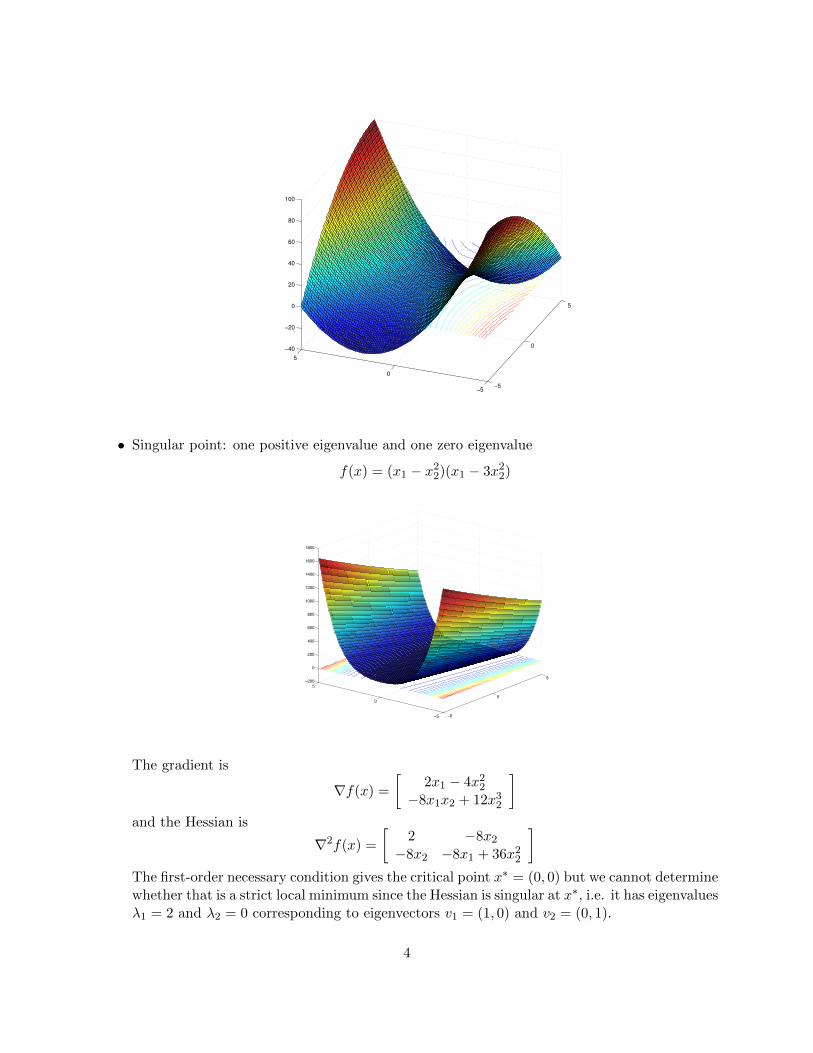
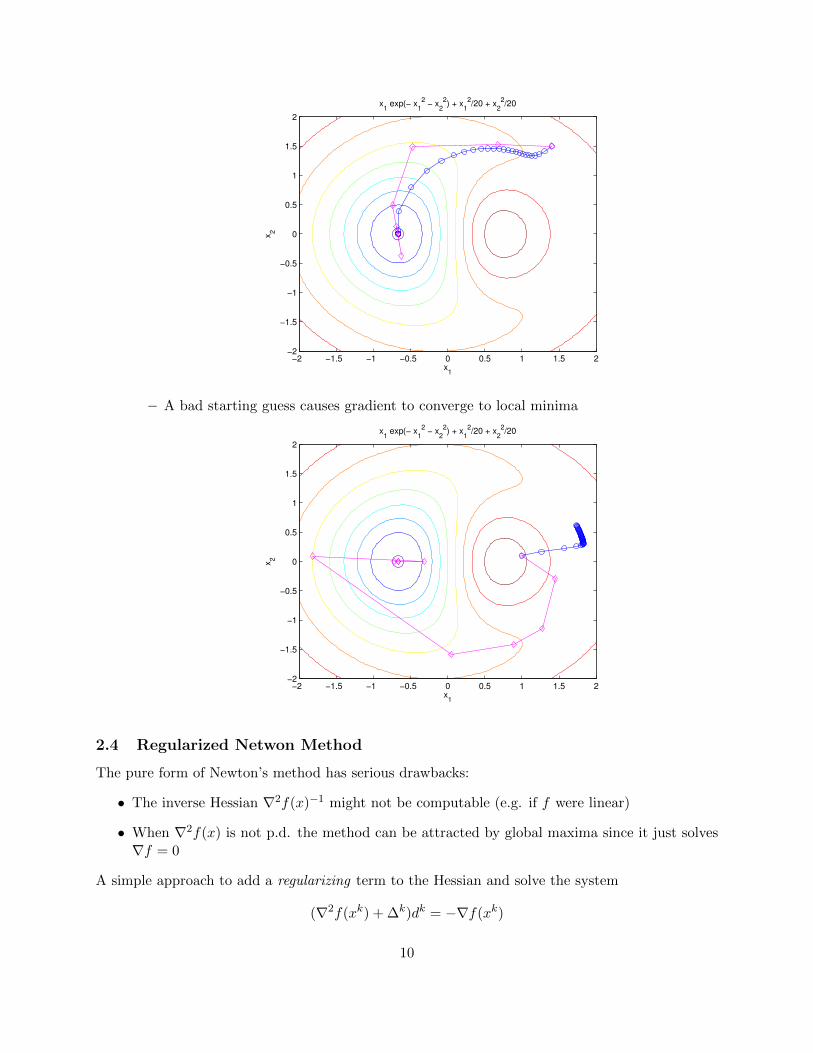
– A bad starting guess causes gradient to converge to local minima
x1
x2
x1 exp(− x
1
2 − x
2
2) + x
1
2/20 + x
2
2/20
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.4 Regularized Netwon Method
The pure form of Newton’s method has serious drawbacks:
• The inverse Hessian ∇2f(x)−1 might not be computable (e.g. if f were linear)
• When ∇2f(x) is not p.d. the method can be attracted by global maxima since it just solves∇f = 0
A simple approach to add a regularizing term to the Hessian and solve the system
(∇2f(xk) + ∆k)dk = −∇f(xk)
10

where the matrix ∆k is chosen so that
∇2f(xk) + ∆k > 0.
There are several ways to choose ∆k. In trust-region methods one sets
∆k = δkI,
where δk > 0 and I is the identity matrix.Newton’s method is derived by finding the direction d which minimizes the local quadratic
approximation fk of f at xk) defined by
fk(d) = f(xk) +∇f(xk)Td+1
2dT∇2f(xk)d.
It can be shown that the resulting method
(∇2f(xk) + δkI)dk = −∇f(xk)
is equivalent to solving the the optimization problem
dk ∈ arg min‖d‖≤γk
fk(d).
The restricted direction d must satisfy ‖d‖ ≤ γk, which is referred to as the trust region.
References
[1] D. P. Bertsekas. Nonlinear Programming, 2nd ed. Athena Scientific, Belmont, MA, 2003.
11