Embed Size (px)
Citation preview
EMG-driven Human Modeling to Enhance
Human-Robot Interaction Control
Mattia Pesenti
Supervisor: Elena De MomiApril 16, 2019
Co-supervisors: Ziad Alkhoury, Bernard Bayle
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Outline
1
• Introduction
• EMG-driven Human Modeling
• Materials and Methods
• Results
• Discussion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Human-Robot Interaction
2
Introduction Human Modeling Materials and Methods Results Conclusion
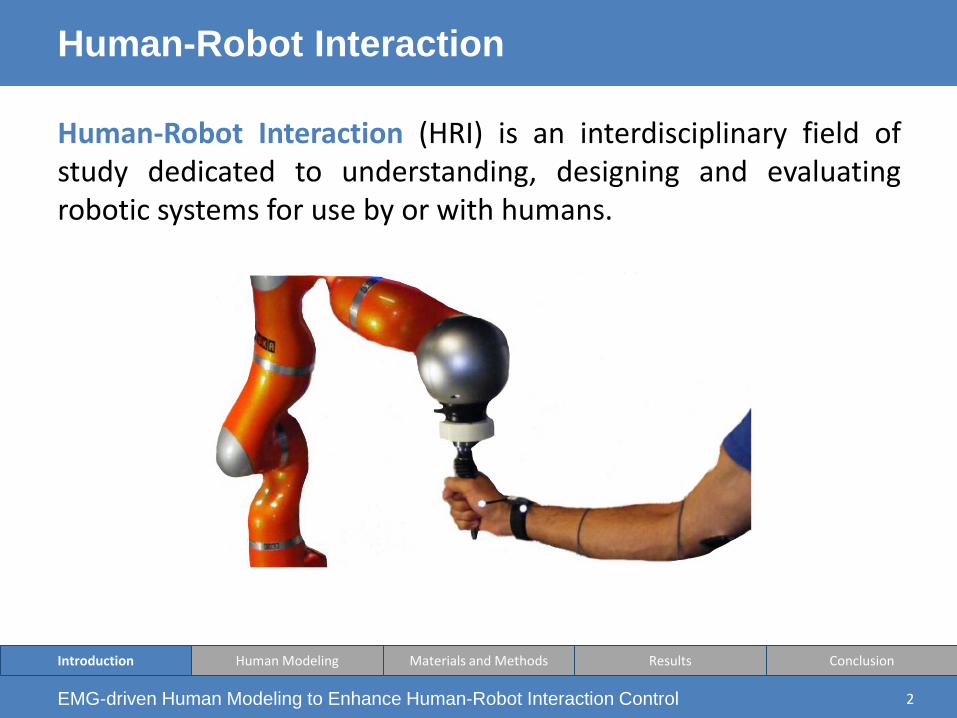
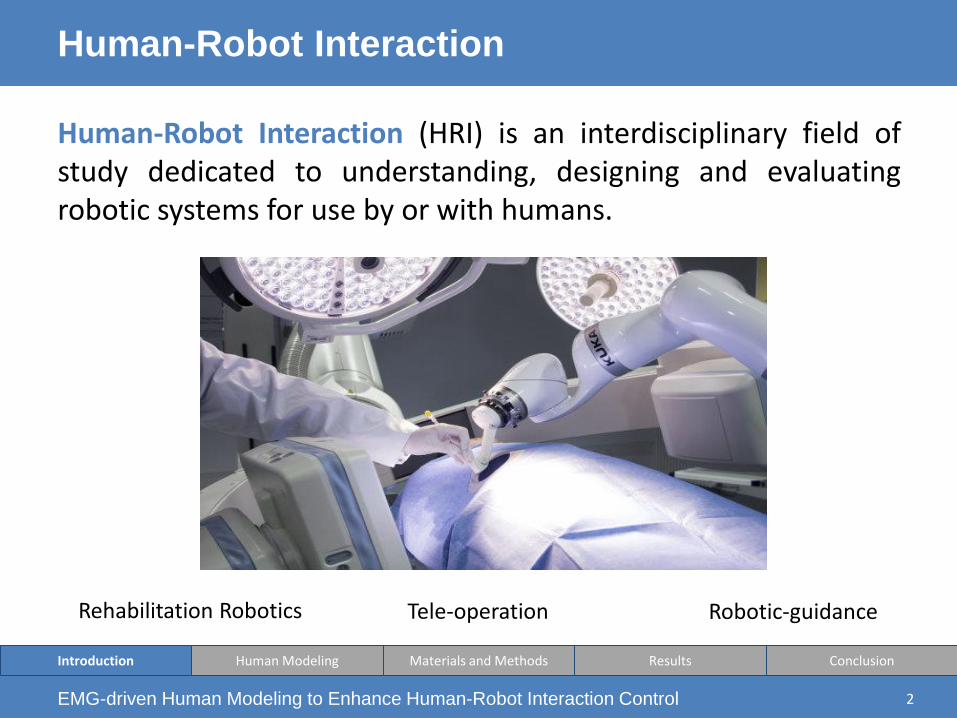
Human-Robot Interaction (HRI) is an interdisciplinary field ofstudy dedicated to understanding, designing and evaluatingrobotic systems for use by or with humans.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Human-Robot Interaction
2
Introduction Human Modeling Materials and Methods Results Conclusion
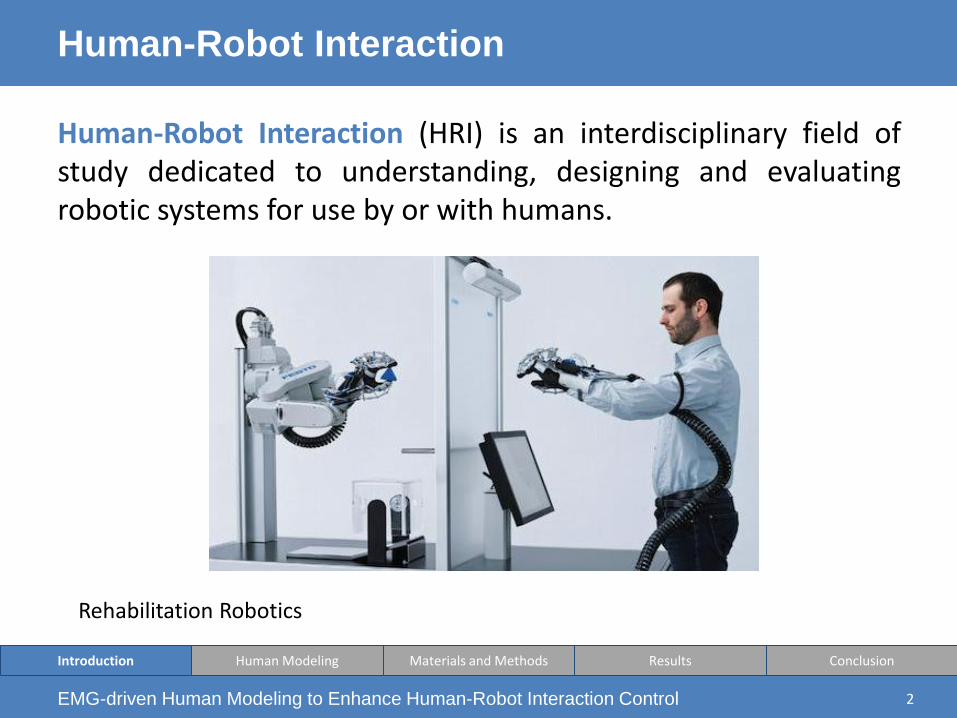
Human-Robot Interaction (HRI) is an interdisciplinary field ofstudy dedicated to understanding, designing and evaluatingrobotic systems for use by or with humans.
Rehabilitation Robotics
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Human-Robot Interaction
2
Introduction Human Modeling Materials and Methods Results Conclusion
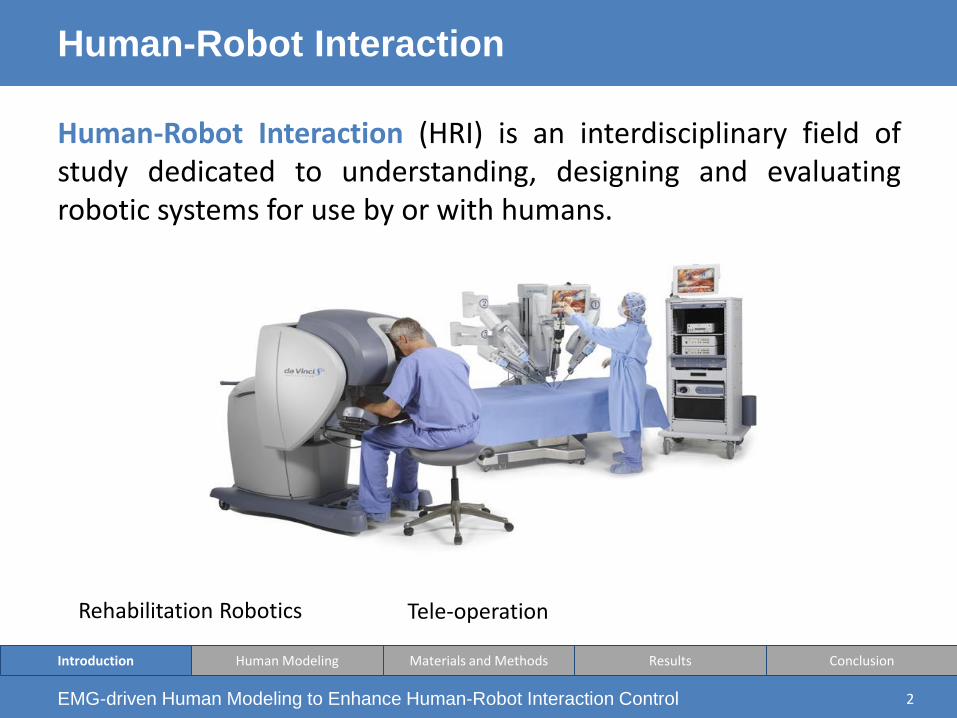
Human-Robot Interaction (HRI) is an interdisciplinary field ofstudy dedicated to understanding, designing and evaluatingrobotic systems for use by or with humans.
Rehabilitation Robotics Tele-operation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Human-Robot Interaction
2
Introduction Human Modeling Materials and Methods Results Conclusion
Human-Robot Interaction (HRI) is an interdisciplinary field ofstudy dedicated to understanding, designing and evaluatingrobotic systems for use by or with humans.
Rehabilitation Robotics Tele-operation Robotic-guidance
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Control-oriented Modeling
3
Introduction Human Modeling Materials and Methods Results Conclusion
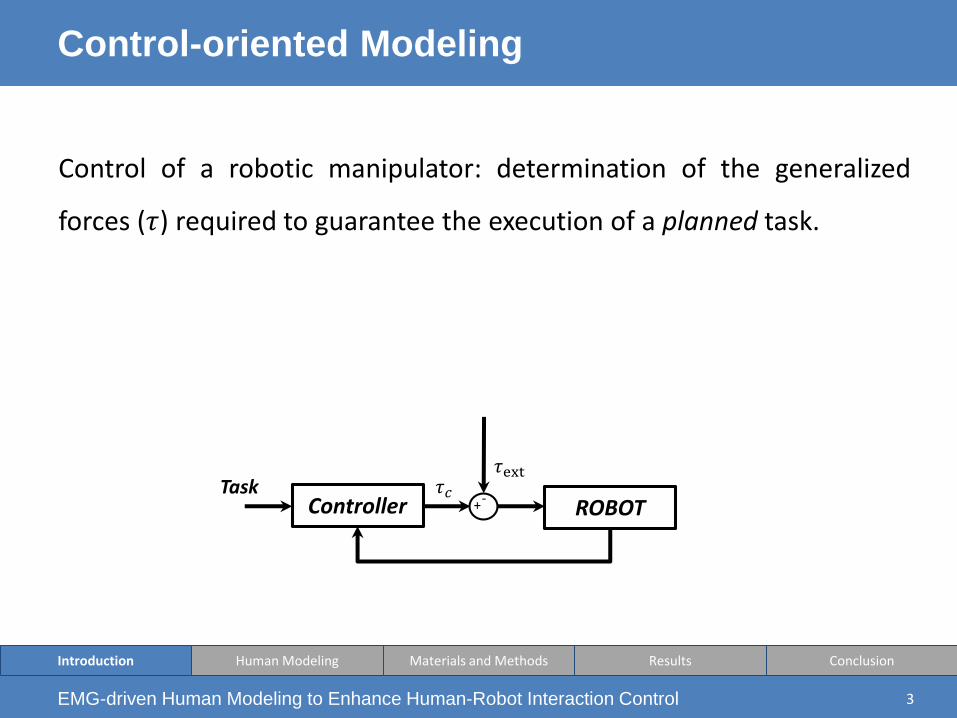
Control of a robotic manipulator: determination of the generalized
forces (𝜏) required to guarantee the execution of a planned task.
ControllerTask
ROBOT𝜏𝑐
𝜏ext
+-
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Control-oriented Modeling
3
Introduction Human Modeling Materials and Methods Results Conclusion
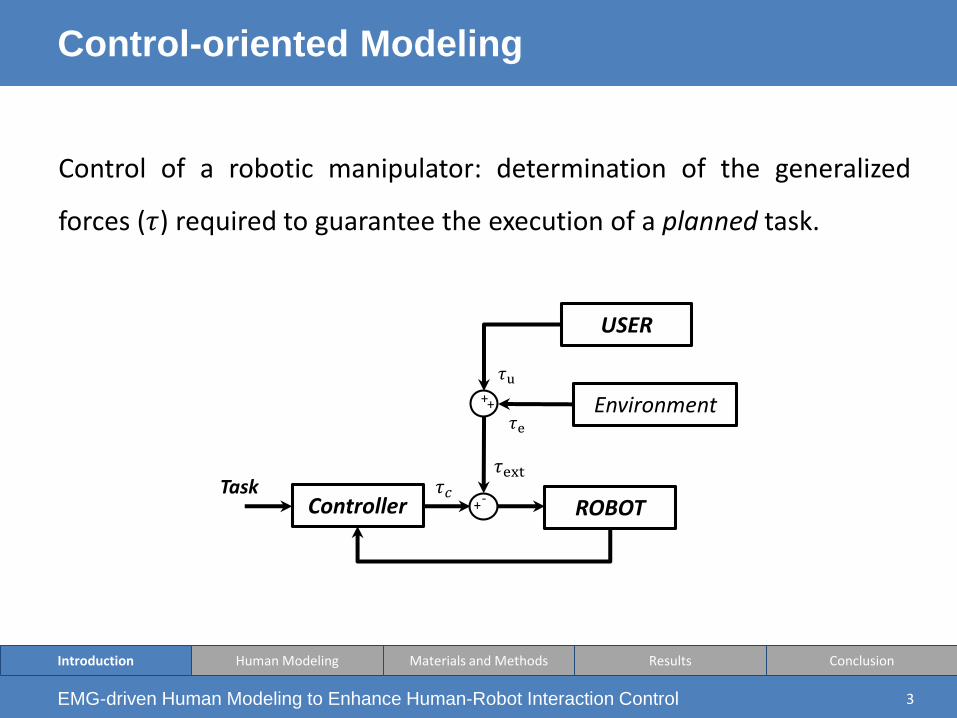
Control of a robotic manipulator: determination of the generalized
forces (𝜏) required to guarantee the execution of a planned task.
ControllerTask
ROBOT
Environment
USER
++
𝜏𝑐𝜏ext
𝜏u
𝜏e
+-
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Control-oriented Modeling
3
Introduction Human Modeling Materials and Methods Results Conclusion
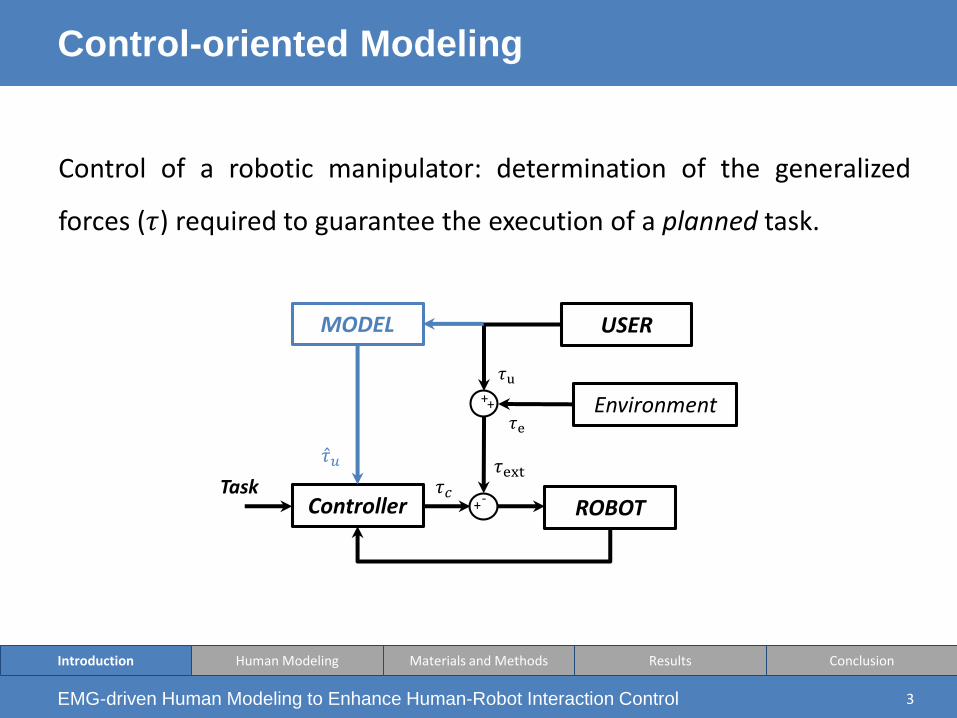
Control of a robotic manipulator: determination of the generalized
forces (𝜏) required to guarantee the execution of a planned task.
ControllerTask
ROBOT
Environment
USERMODEL
++
𝜏𝑐𝜏ext
Ƹ𝜏𝑢
𝜏u
𝜏e
+-
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Outline
4
• Introduction
• EMG-driven Human Modeling
• Materials and Methods
• Results
• Discussion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
State of the Art
5
Introduction Human Modeling Materials and Methods Results Conclusion
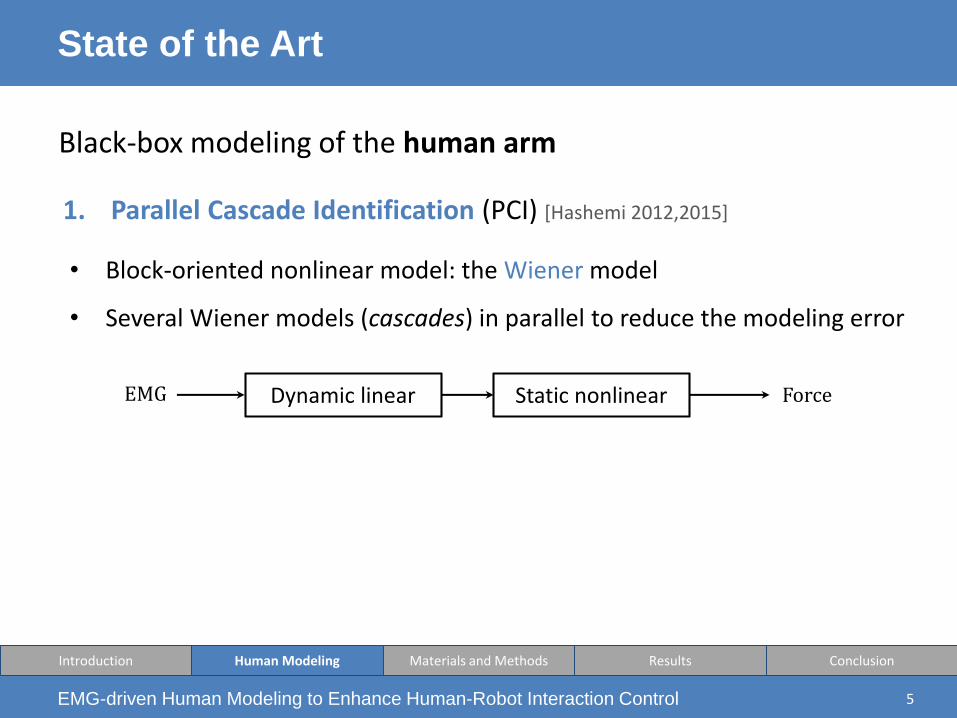
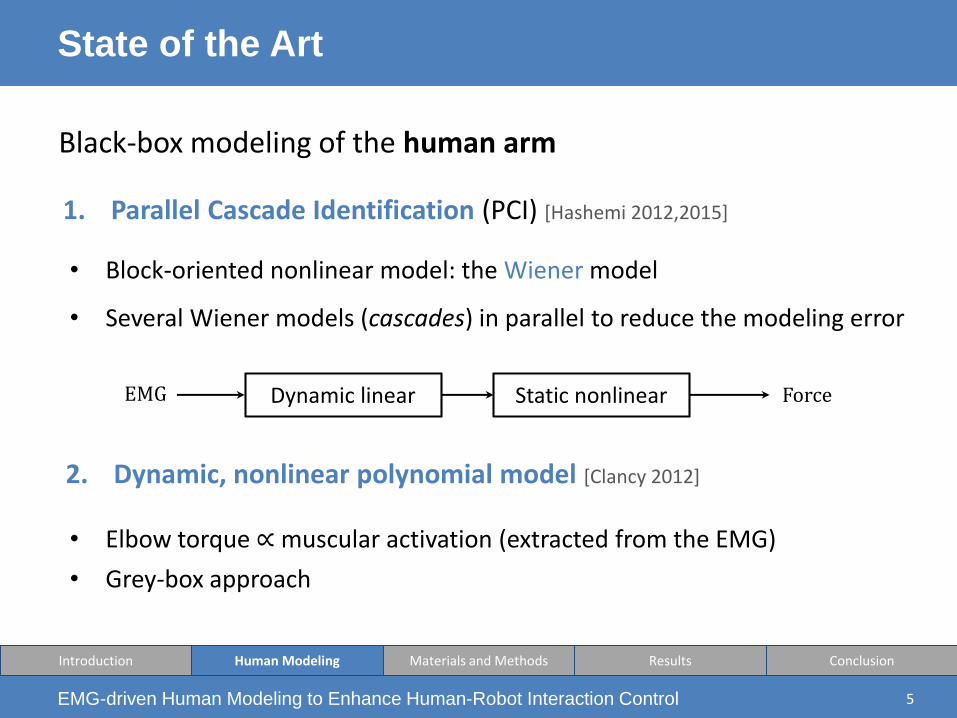
Black-box modeling of the human arm
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
State of the Art
5
Introduction Human Modeling Materials and Methods Results Conclusion
Black-box modeling of the human arm
1. Parallel Cascade Identification (PCI) [Hashemi 2012,2015]
• Block-oriented nonlinear model: the Wiener model
• Several Wiener models (cascades) in parallel to reduce the modeling error
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
State of the Art
5
Introduction Human Modeling Materials and Methods Results Conclusion
Black-box modeling of the human arm
1. Parallel Cascade Identification (PCI) [Hashemi 2012,2015]
• Block-oriented nonlinear model: the Wiener model
• Several Wiener models (cascades) in parallel to reduce the modeling error
Dynamic linear Static nonlinearEMG Force
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
State of the Art
5
Introduction Human Modeling Materials and Methods Results Conclusion
Black-box modeling of the human arm
1. Parallel Cascade Identification (PCI) [Hashemi 2012,2015]
• Block-oriented nonlinear model: the Wiener model
• Several Wiener models (cascades) in parallel to reduce the modeling error
Dynamic linear Static nonlinearEMG Force
2. Dynamic, nonlinear polynomial model [Clancy 2012]
• Elbow torque ∝ muscular activation (extracted from the EMG)
• Grey-box approach
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Problem Statement
6
Introduction Human Modeling Materials and Methods Results Conclusion
The current state-of-the-art methods provide a black-box for the
human arm. On the other hand, these models are
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Problem Statement
6
Introduction Human Modeling Materials and Methods Results Conclusion
The current state-of-the-art methods provide a black-box for the
human arm. On the other hand, these models are
Highly nonlinear
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Problem Statement
6
Introduction Human Modeling Materials and Methods Results Conclusion
The current state-of-the-art methods provide a black-box for the
human arm. On the other hand, these models are
Highly nonlinear
Computationally complex
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Problem Statement
6
Introduction Human Modeling Materials and Methods Results Conclusion
The current state-of-the-art methods provide a black-box for the
human arm. On the other hand, these models are
Highly nonlinear
Computationally complex
Not suitable for online control problems
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Problem Statement
6
Introduction Human Modeling Materials and Methods Results Conclusion
The current state-of-the-art methods provide a black-box for the
human arm. On the other hand, these models are
Highly nonlinear
Computationally complex
Not suitable for online control problems
Accurate only for constant-posture force trials
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Motivation and Aims
7
The goal of this master thesis project has been to identify a black-box
model of the EMG-Force relationship of the human arm.
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Motivation and Aims
7
• Control-oriented human modeling
The goal of this master thesis project has been to identify a black-box
model of the EMG-Force relationship of the human arm.
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Motivation and Aims
7
• Direct I/O relationship between EMG and force
• Control-oriented human modeling
The goal of this master thesis project has been to identify a black-box
model of the EMG-Force relationship of the human arm.
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Motivation and Aims
7
• Suitable for Human-Robot Interaction
• Direct I/O relationship between EMG and force
• Control-oriented human modeling
The goal of this master thesis project has been to identify a black-box
model of the EMG-Force relationship of the human arm.
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Outline
8
• Introduction
• EMG-driven Human Modeling
• Materials and Methods
• Results
• Discussion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
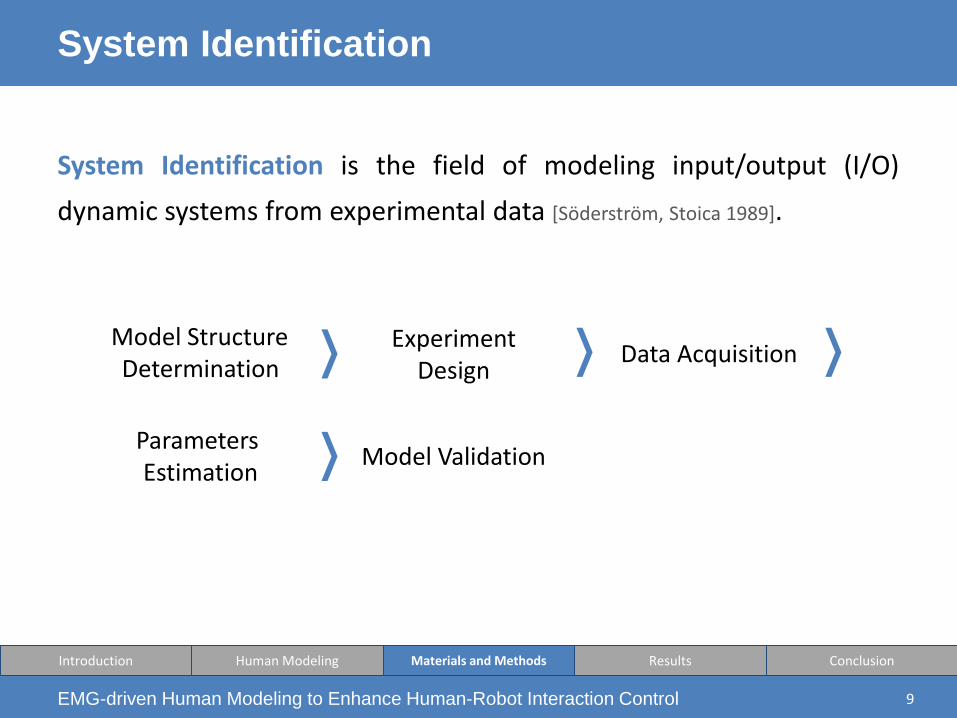
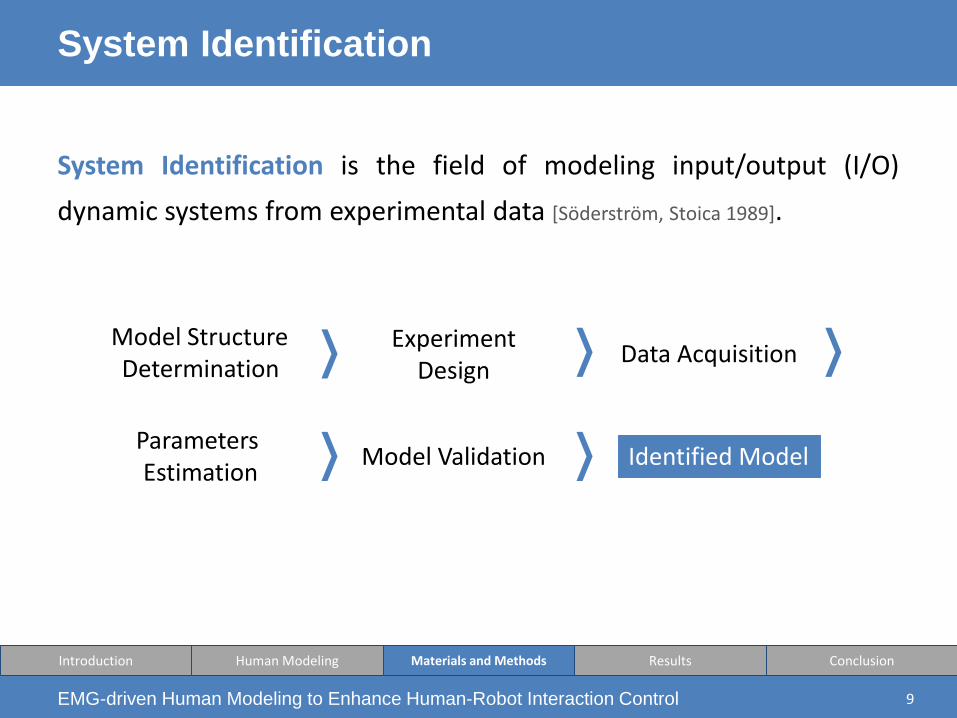
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].

EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
ExperimentDesign
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
ExperimentDesign
Data Acquisition
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
ExperimentDesign
Data Acquisition
Parameters Estimation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
ExperimentDesign
Data Acquisition
Parameters Estimation
Model Validation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
System Identification
9
Introduction Human Modeling Materials and Methods Results Conclusion
System Identification is the field of modeling input/output (I/O)
dynamic systems from experimental data [Söderström, Stoica 1989].
Model StructureDetermination
ExperimentDesign
Data Acquisition
Identified ModelParameters Estimation
Model Validation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The 1-DoF Human Arm (1/2)
10
Introduction Human Modeling Materials and Methods Results Conclusion
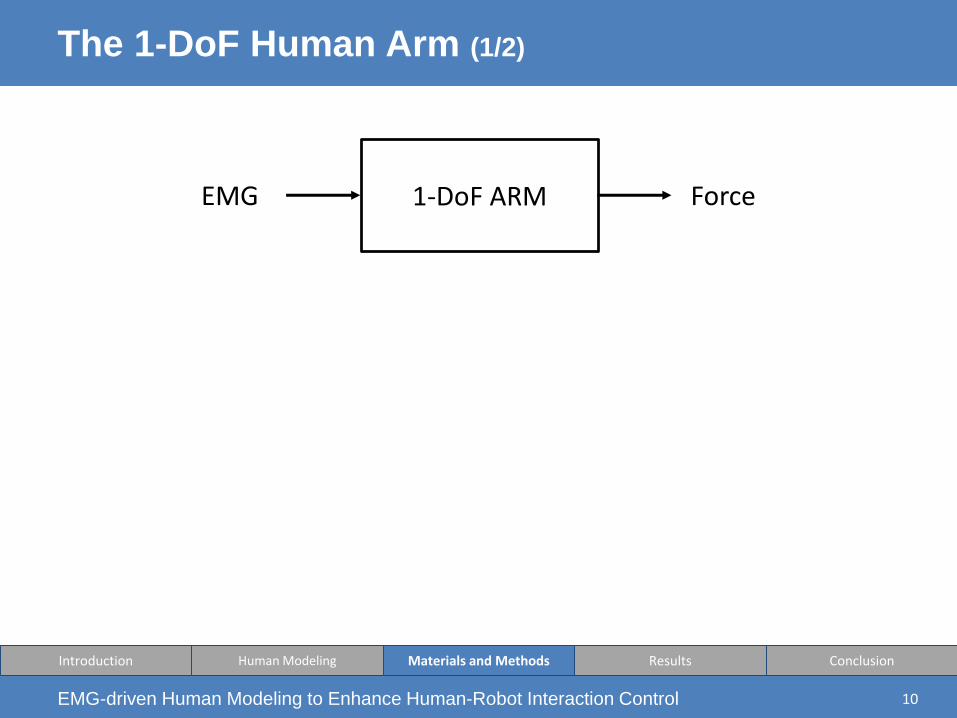
EMG Force1-DoF ARM
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The 1-DoF Human Arm (1/2)
10
Introduction Human Modeling Materials and Methods Results Conclusion
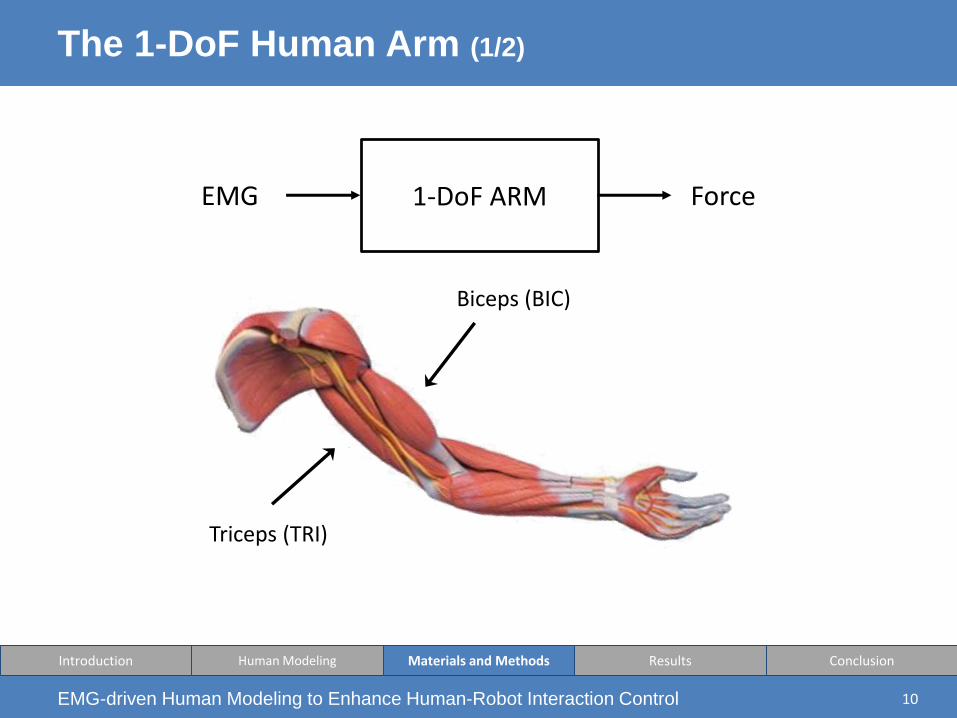
EMG Force
Biceps (BIC)
Triceps (TRI)
1-DoF ARM
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The 1-DoF Human Arm (1/2)
10
Introduction Human Modeling Materials and Methods Results Conclusion
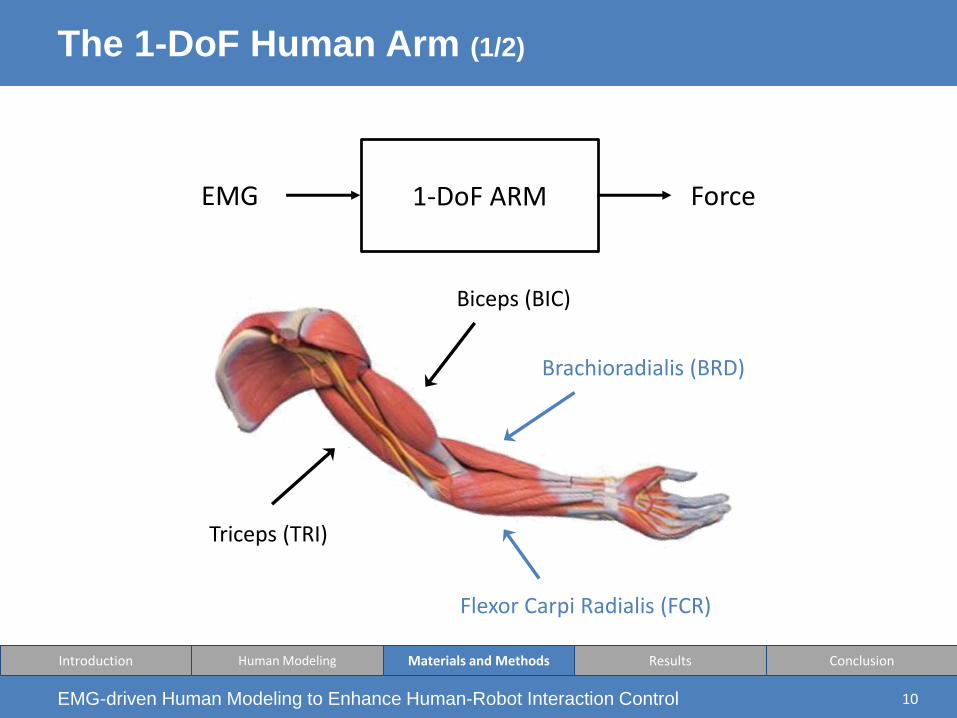
EMG Force
Biceps (BIC)
Triceps (TRI)
Flexor Carpi Radialis (FCR)
Brachioradialis (BRD)
1-DoF ARM
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
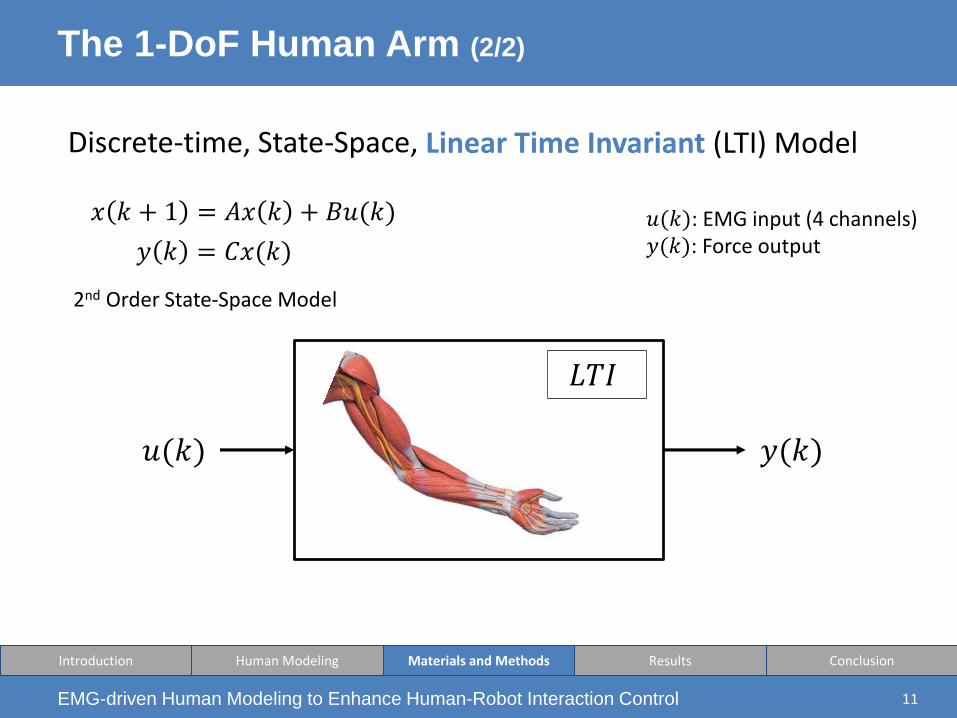
𝑦 𝑘 = 𝐶𝑥(𝑘)
The 1-DoF Human Arm (2/2)
11
Introduction Human Modeling Materials and Methods Results Conclusion
Discrete-time, State-Space,
𝑢(𝑘) 𝑦(𝑘)
𝐿𝑇𝐼
𝑢(𝑘): EMG input (4 channels)𝑦(𝑘): Force output
2nd Order State-Space Model
Linear Time Invariant (LTI) Model
𝑥 𝑘 + 1 = 𝐴𝑥 𝑘 + 𝐵𝑢(𝑘)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
𝑦 𝑘 = 𝐶𝑥(𝑘)
The 1-DoF Human Arm (2/2)
11
Introduction Human Modeling Materials and Methods Results Conclusion
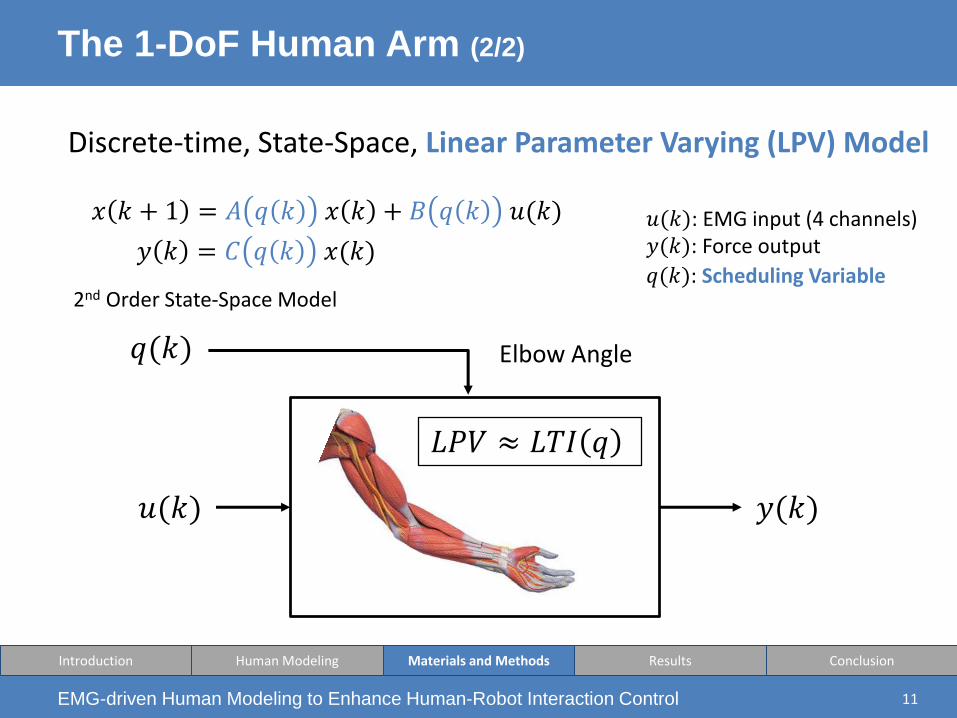
Discrete-time, State-Space,
𝑢(𝑘) 𝑦(𝑘)
𝐿𝑃𝑉 ≈ 𝐿𝑇𝐼 𝑞
Linear Parameter Varying (LPV) Model
𝑞(𝑘)
𝑢(𝑘): EMG input (4 channels)𝑦(𝑘): Force output
𝑞(𝑘): Scheduling Variable2nd Order State-Space Model
𝑥 𝑘 + 1 = 𝐴𝑥 𝑘 + 𝐵𝑢(𝑘)𝑥 𝑘 + 1 = 𝐴 𝑞 𝑘 𝑥 𝑘 + 𝐵 𝑞 𝑘 𝑢(𝑘)
𝑦 𝑘 = 𝐶 𝑞 𝑘 𝑥(𝑘)
Elbow Angle
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
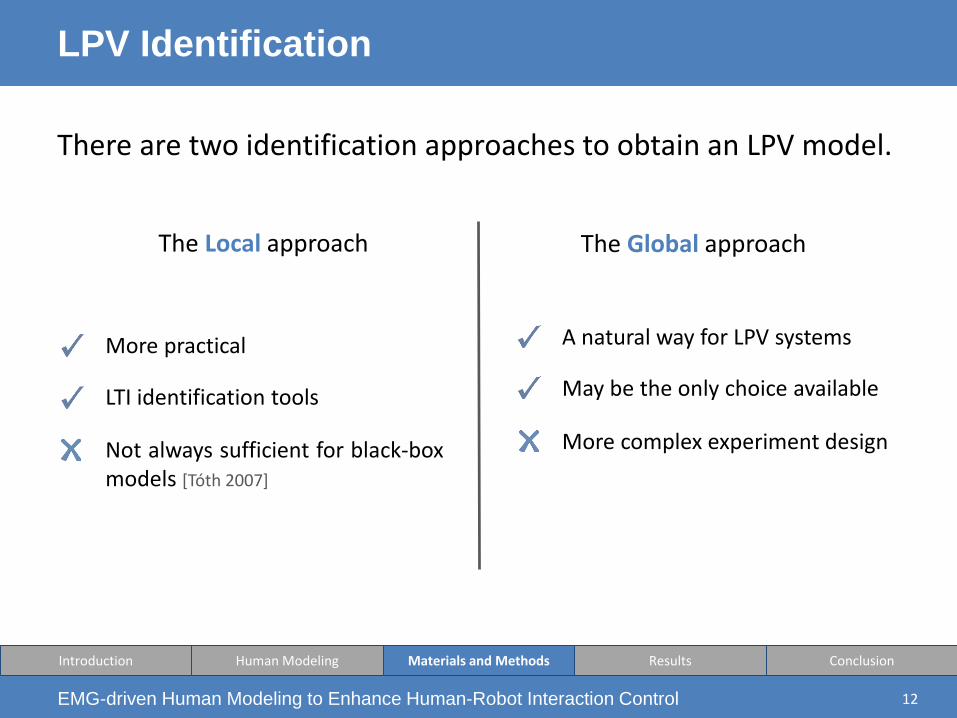
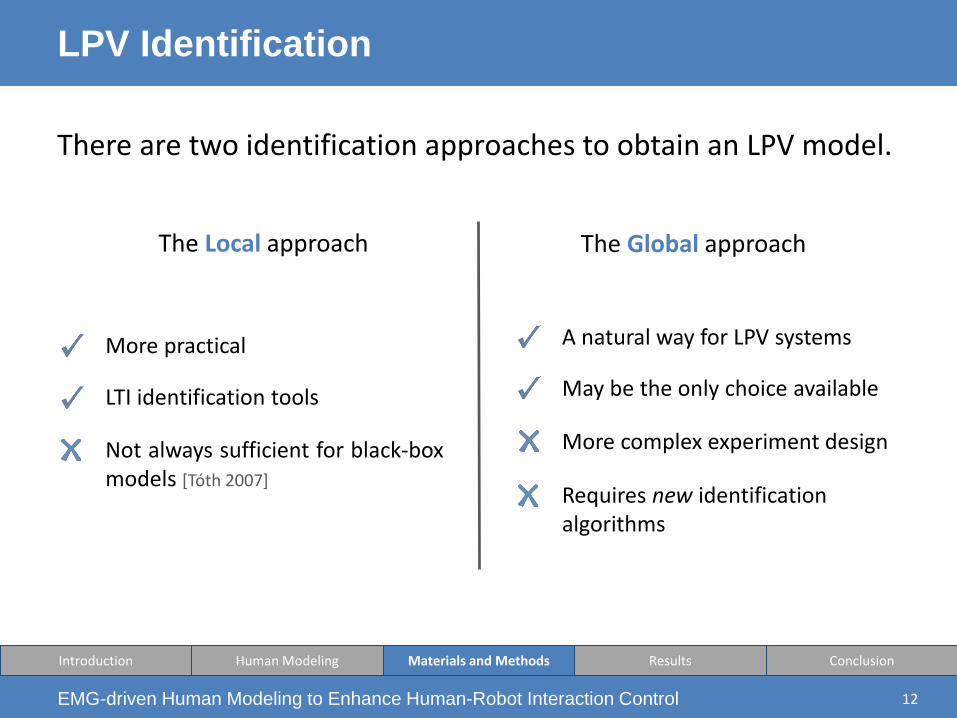
There are two identification approaches to obtain an LPV model.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach
More practical
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach
More practical
LTI identification tools
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach
More practical
LTI identification tools
Not always sufficient for black-boxmodels [Tóth 2007]
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach The Global approach
More practical
LTI identification tools
Not always sufficient for black-boxmodels [Tóth 2007]
A natural way for LPV systems
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach The Global approach
More practical
LTI identification tools
Not always sufficient for black-boxmodels [Tóth 2007]
A natural way for LPV systems
May be the only choice available
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach The Global approach
More practical
LTI identification tools
Not always sufficient for black-boxmodels [Tóth 2007]
A natural way for LPV systems
May be the only choice available
More complex experiment design
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LPV Identification
12
Introduction Human Modeling Materials and Methods Results Conclusion
There are two identification approaches to obtain an LPV model.
The Local approach The Global approach
More practical
LTI identification tools
Not always sufficient for black-boxmodels [Tóth 2007]
A natural way for LPV systems
May be the only choice available
More complex experiment design
Requires new identification algorithms
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Local Identification Framework [LIF]
13
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Local Identification Framework [LIF]
13
Introduction Human Modeling Materials and Methods Results Conclusion
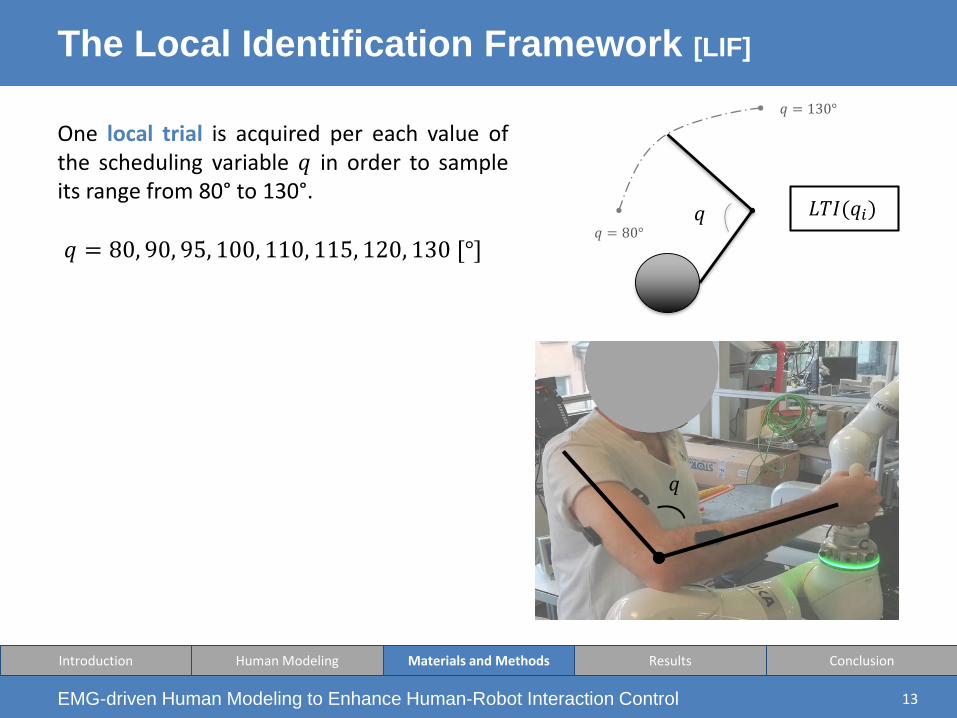
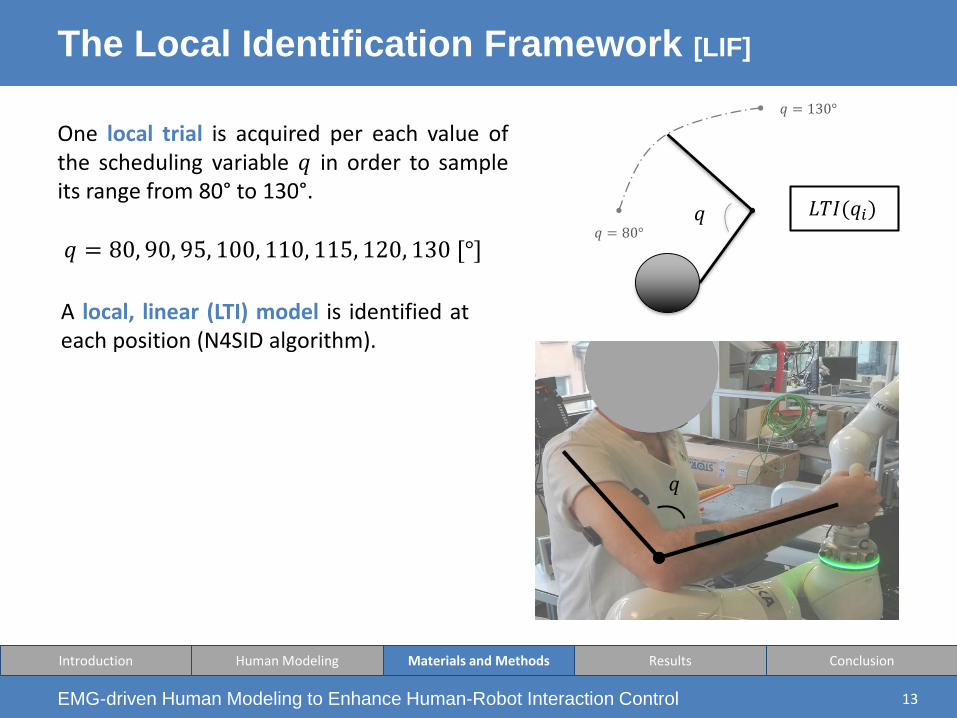
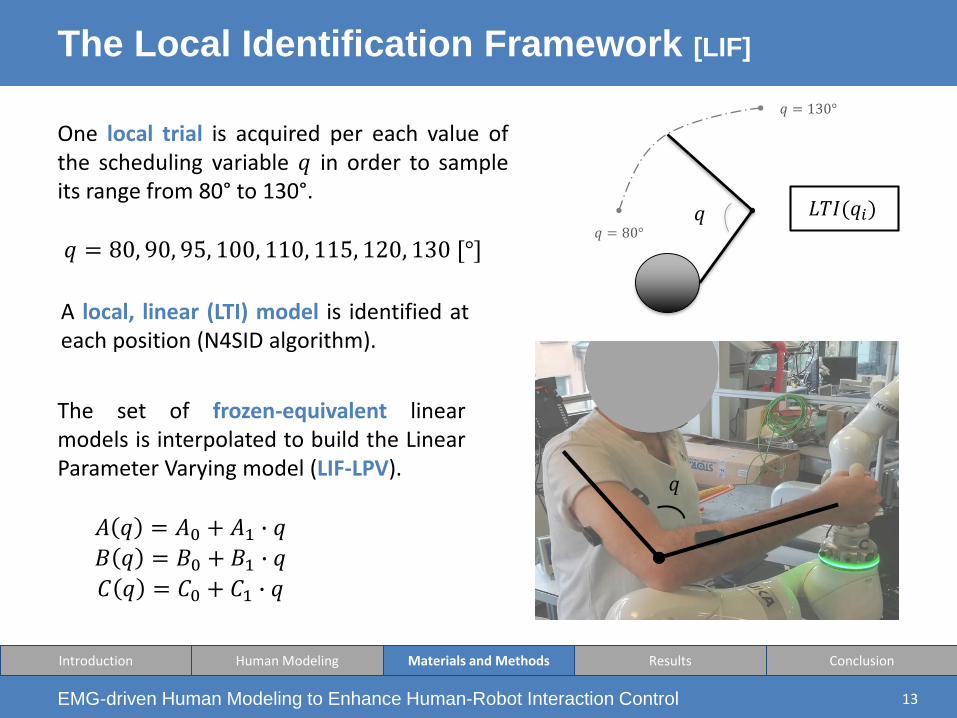
One local trial is acquired per each value ofthe scheduling variable 𝑞 in order to sampleits range from 80° to 130°.
𝑞 = 80, 90, 95, 100, 110, 115, 120, 130 [°]
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Local Identification Framework [LIF]
13
Introduction Human Modeling Materials and Methods Results Conclusion
One local trial is acquired per each value ofthe scheduling variable 𝑞 in order to sampleits range from 80° to 130°.
𝑞 𝐿𝑇𝐼(𝑞𝑖)𝑞 = 80°
𝑞 = 130°
𝑞 = 80, 90, 95, 100, 110, 115, 120, 130 [°]
𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Local Identification Framework [LIF]
13
Introduction Human Modeling Materials and Methods Results Conclusion
One local trial is acquired per each value ofthe scheduling variable 𝑞 in order to sampleits range from 80° to 130°.
A local, linear (LTI) model is identified ateach position (N4SID algorithm).
𝑞 𝐿𝑇𝐼(𝑞𝑖)𝑞 = 80°
𝑞 = 130°
𝑞 = 80, 90, 95, 100, 110, 115, 120, 130 [°]
𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Local Identification Framework [LIF]
13
Introduction Human Modeling Materials and Methods Results Conclusion
One local trial is acquired per each value ofthe scheduling variable 𝑞 in order to sampleits range from 80° to 130°.
A local, linear (LTI) model is identified ateach position (N4SID algorithm).
The set of frozen-equivalent linearmodels is interpolated to build the LinearParameter Varying model (LIF-LPV).
𝐴 𝑞 = 𝐴0 + 𝐴1 ∙ 𝑞
𝐵 𝑞 = 𝐵0 + 𝐵1 ∙ 𝑞
𝐶 𝑞 = 𝐶0 + 𝐶1 ∙ 𝑞
𝑞 𝐿𝑇𝐼(𝑞𝑖)𝑞 = 80°
𝑞 = 130°
𝑞 = 80, 90, 95, 100, 110, 115, 120, 130 [°]
𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Global Identification Framework [GIF]
14
Introduction Human Modeling Materials and Methods Results Conclusion
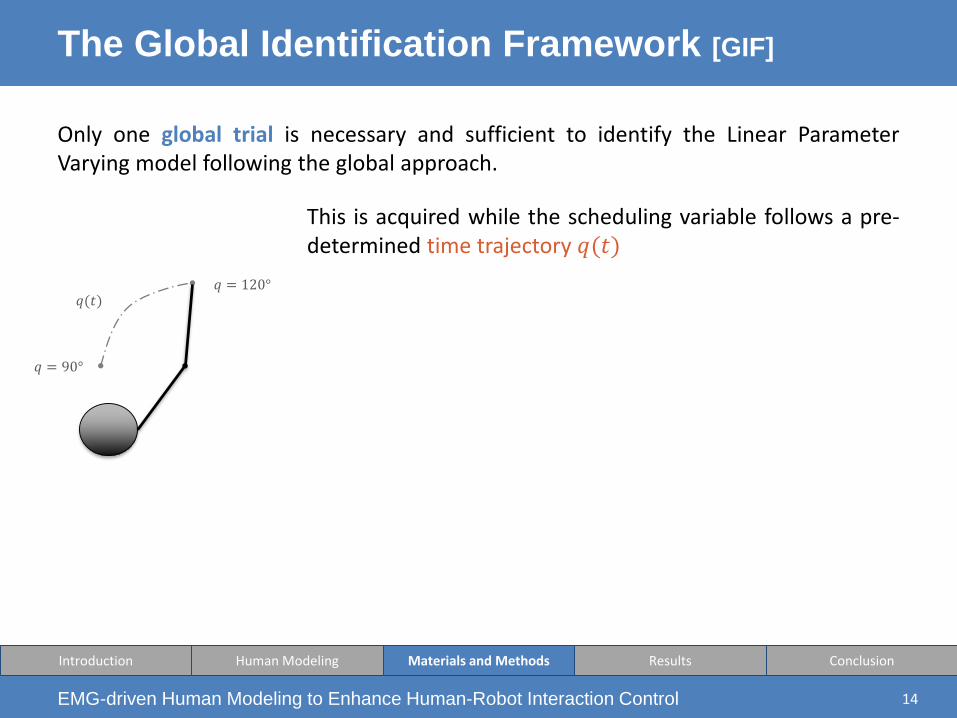
Only one global trial is necessary and sufficient to identify the Linear ParameterVarying model following the global approach.
𝑞(𝑡)
𝑞 = 90°
𝑞 = 120°
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Global Identification Framework [GIF]
14
Introduction Human Modeling Materials and Methods Results Conclusion
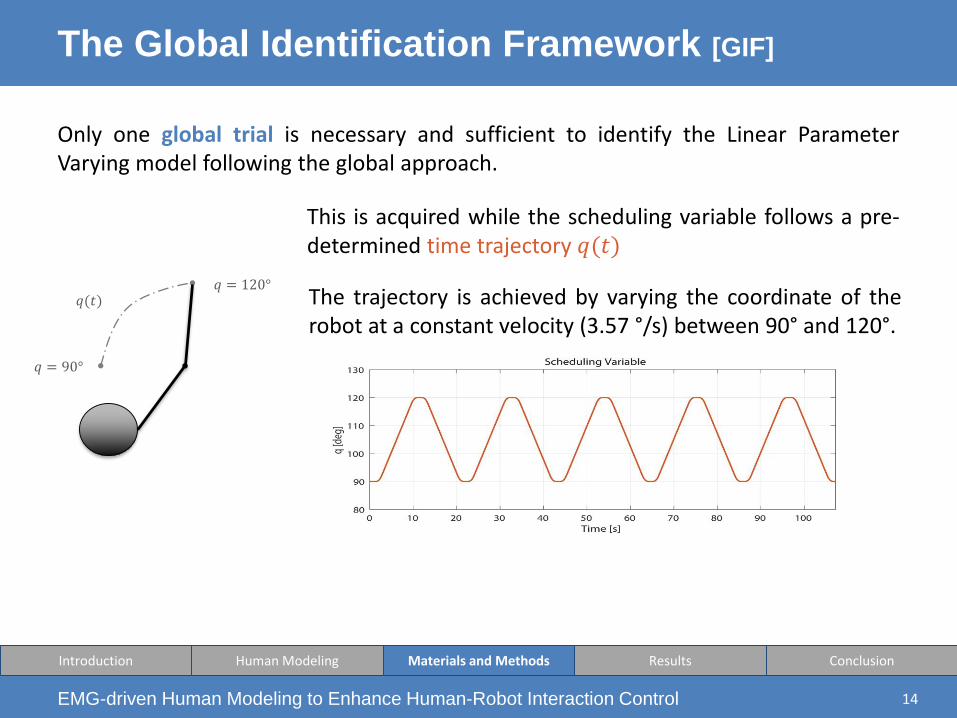
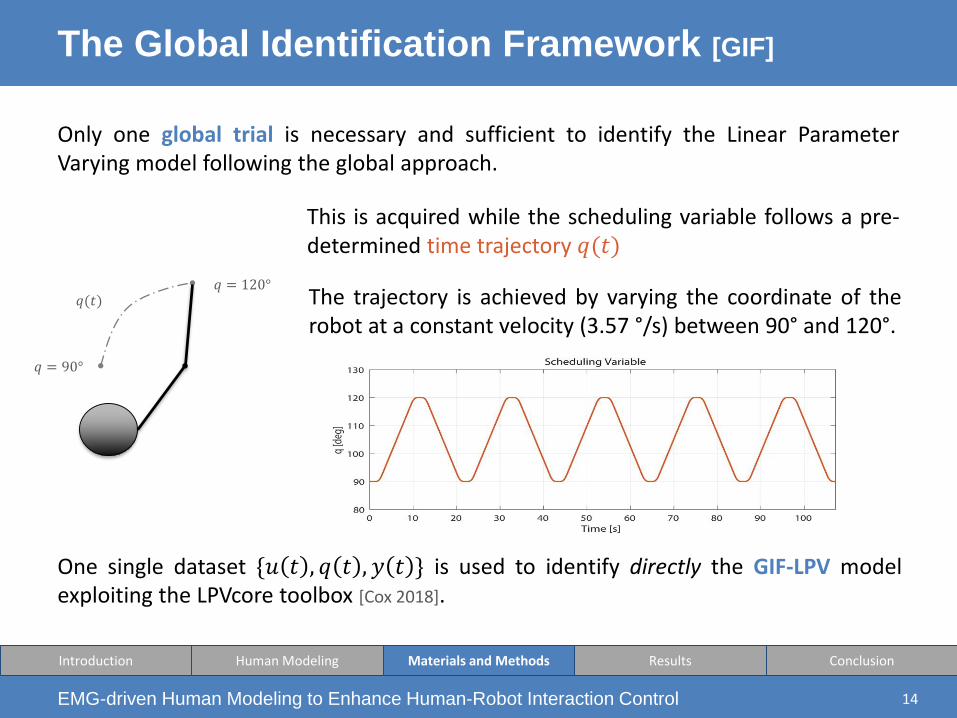
Only one global trial is necessary and sufficient to identify the Linear ParameterVarying model following the global approach.
This is acquired while the scheduling variable follows a pre-determined time trajectory 𝑞(𝑡)
𝑞(𝑡)
𝑞 = 90°
𝑞 = 120°
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Global Identification Framework [GIF]
14
Introduction Human Modeling Materials and Methods Results Conclusion
Only one global trial is necessary and sufficient to identify the Linear ParameterVarying model following the global approach.
This is acquired while the scheduling variable follows a pre-determined time trajectory 𝑞(𝑡)
𝑞(𝑡) The trajectory is achieved by varying the coordinate of therobot at a constant velocity (3.57 °/s) between 90° and 120°.
𝑞 = 90°
𝑞 = 120°
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Global Identification Framework [GIF]
14
Introduction Human Modeling Materials and Methods Results Conclusion
Only one global trial is necessary and sufficient to identify the Linear ParameterVarying model following the global approach.
This is acquired while the scheduling variable follows a pre-determined time trajectory 𝑞(𝑡)
𝑞(𝑡) The trajectory is achieved by varying the coordinate of therobot at a constant velocity (3.57 °/s) between 90° and 120°.
One single dataset {𝑢 𝑡 , 𝑞 𝑡 , 𝑦 𝑡 } is used to identify directly the GIF-LPV modelexploiting the LPVcore toolbox [Cox 2018].
𝑞 = 90°
𝑞 = 120°
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
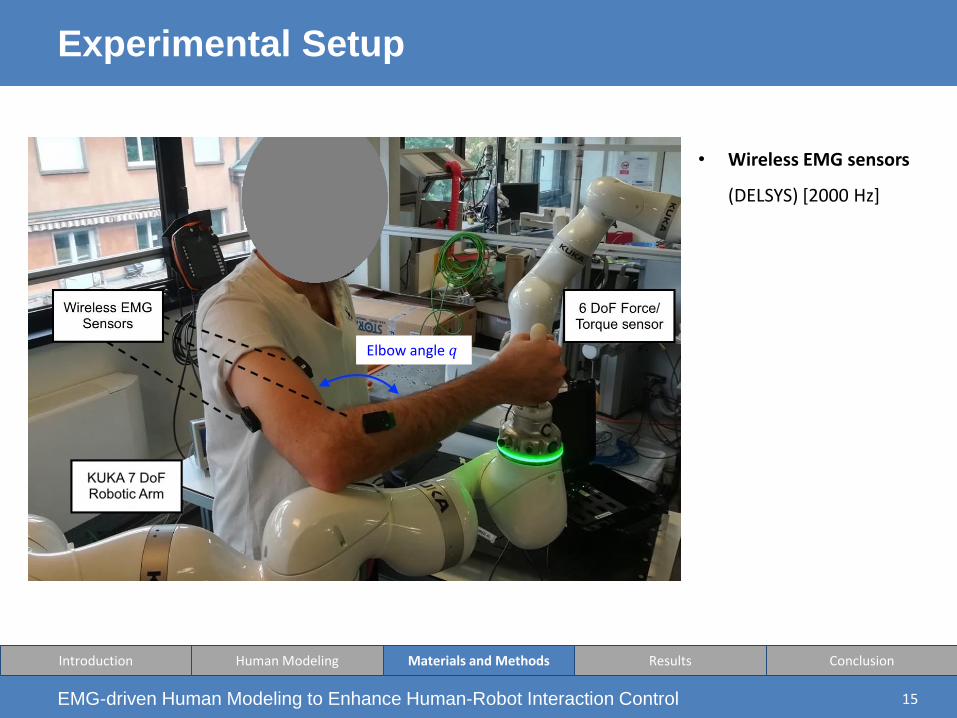
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
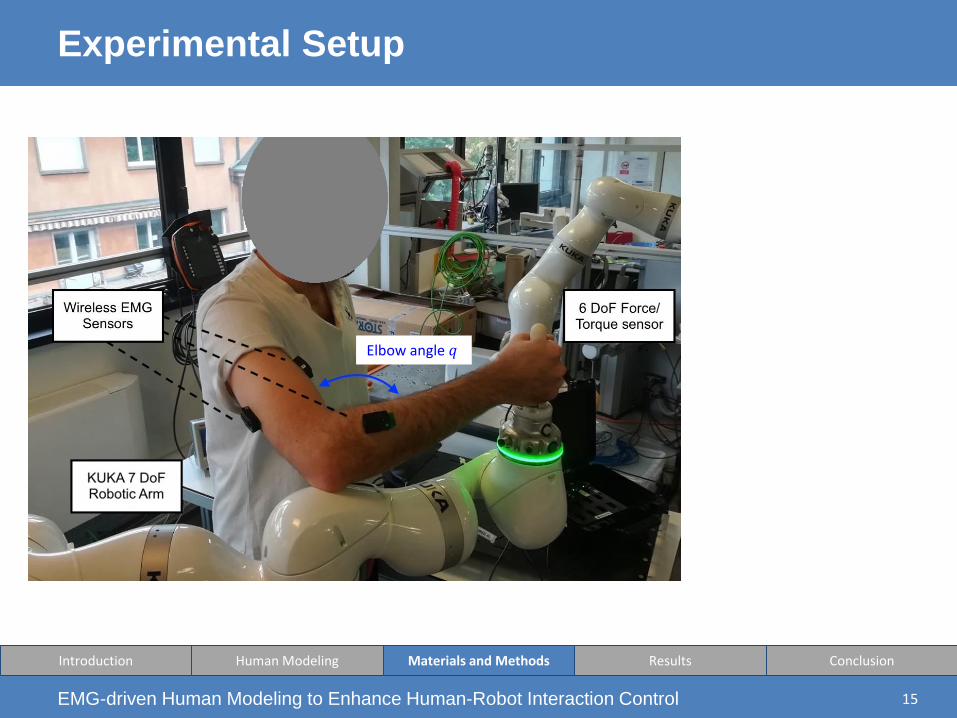
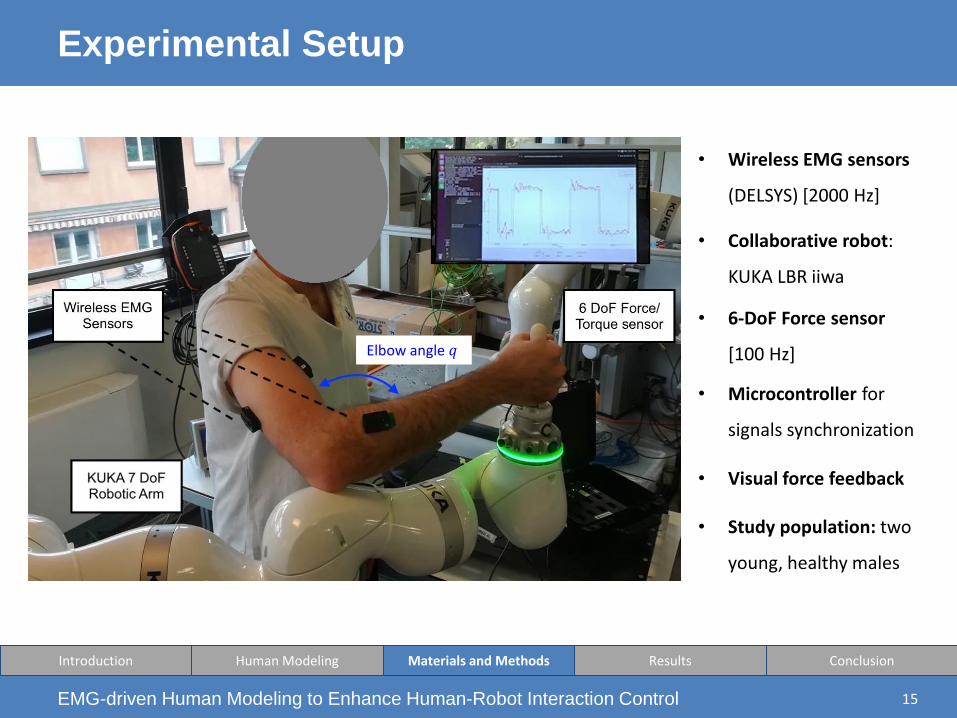
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
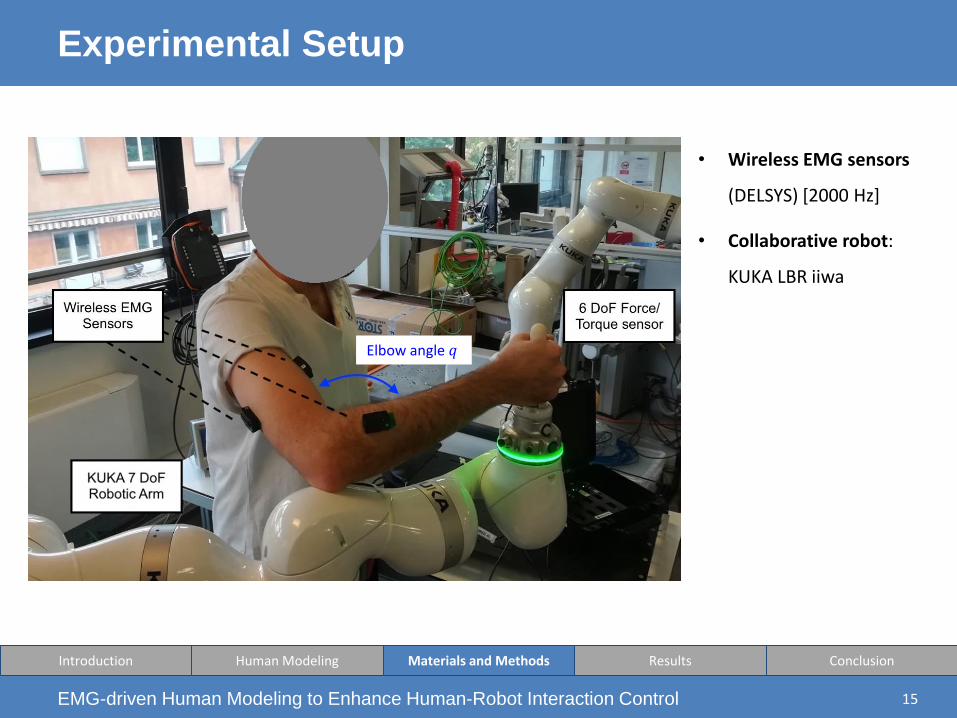
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
• Wireless EMG sensors
(DELSYS) [2000 Hz]
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
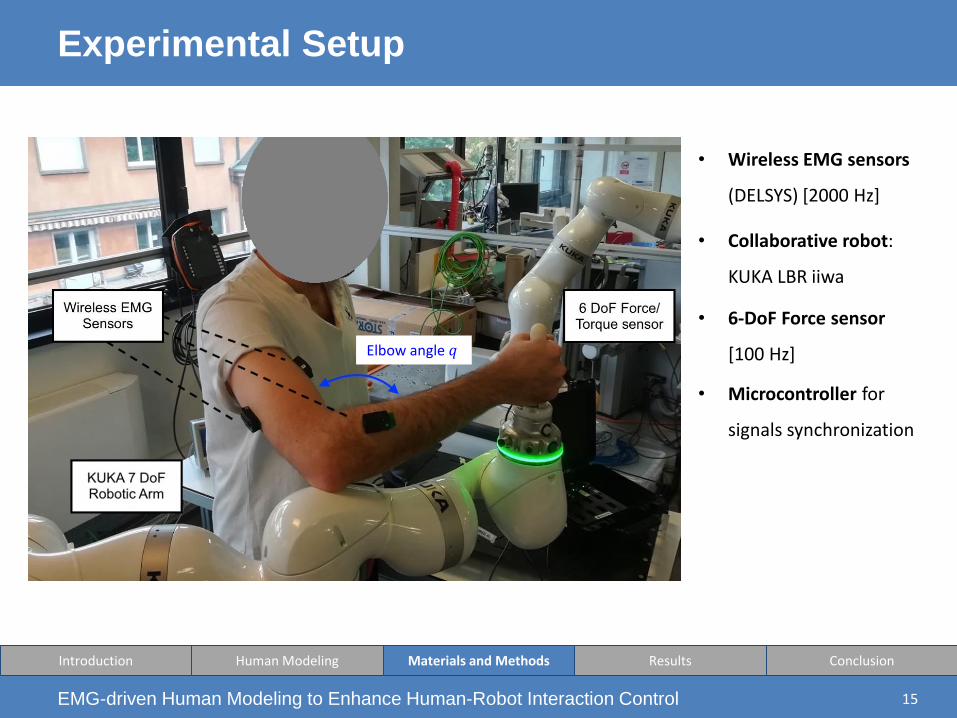
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
• Wireless EMG sensors
(DELSYS) [2000 Hz]
• Collaborative robot:
KUKA LBR iiwa
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
• Wireless EMG sensors
(DELSYS) [2000 Hz]
• Collaborative robot:
KUKA LBR iiwa
• 6-DoF Force sensor
[100 Hz]
• Microcontroller for
signals synchronization
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
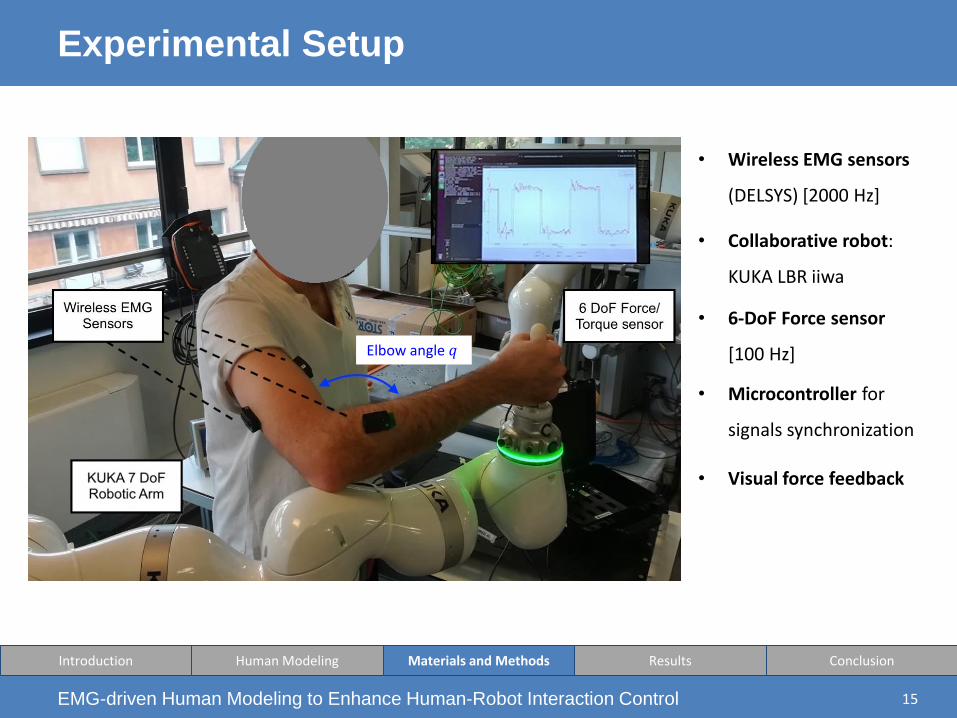
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
• Wireless EMG sensors
(DELSYS) [2000 Hz]
• Collaborative robot:
KUKA LBR iiwa
• Visual force feedback
• 6-DoF Force sensor
[100 Hz]
• Microcontroller for
signals synchronization
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Experimental Setup
15
Introduction Human Modeling Materials and Methods Results Conclusion
• Wireless EMG sensors
(DELSYS) [2000 Hz]
• Collaborative robot:
KUKA LBR iiwa
• Visual force feedback
• 6-DoF Force sensor
[100 Hz]
• Study population: two
young, healthy males
• Microcontroller for
signals synchronization
Elbow angle 𝑞
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Task
16
Introduction Human Modeling Materials and Methods Results Conclusion
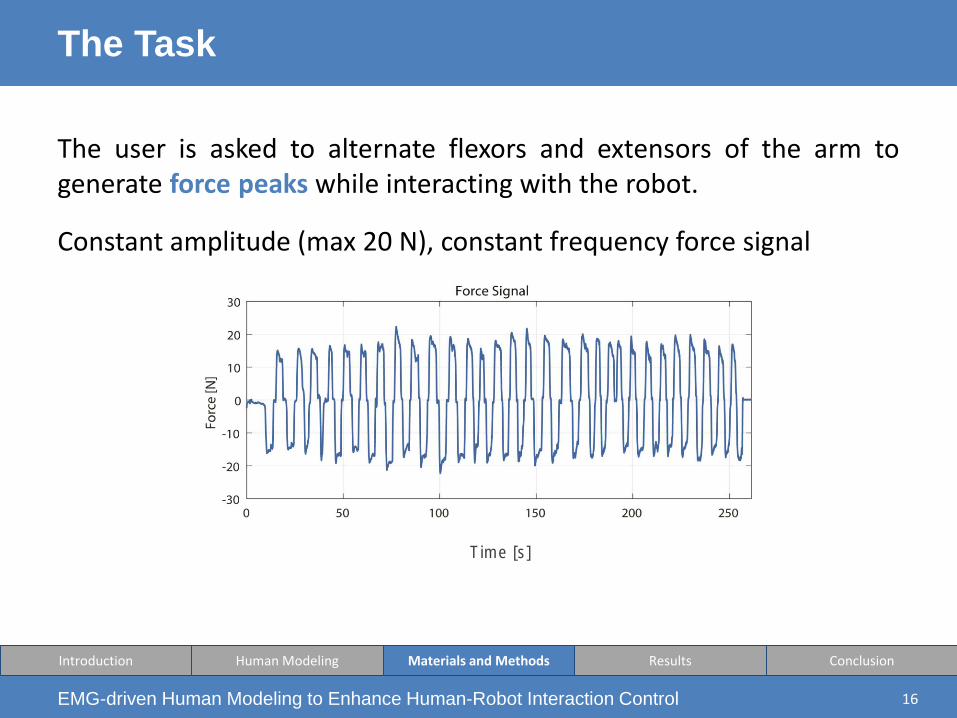
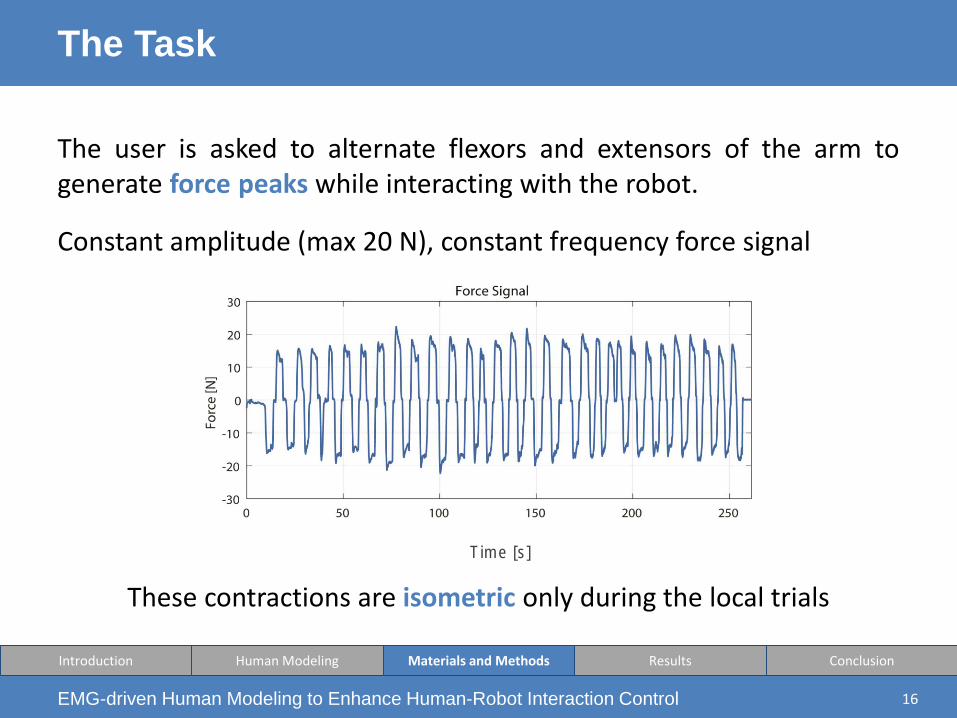
The user is asked to alternate flexors and extensors of the arm togenerate force peaks while interacting with the robot.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Task
16
Introduction Human Modeling Materials and Methods Results Conclusion
The user is asked to alternate flexors and extensors of the arm togenerate force peaks while interacting with the robot.
Constant amplitude (max 20 N), constant frequency force signal
Time [s]
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The Task
16
Introduction Human Modeling Materials and Methods Results Conclusion
The user is asked to alternate flexors and extensors of the arm togenerate force peaks while interacting with the robot.
Constant amplitude (max 20 N), constant frequency force signal
Time [s]
These contractions are isometric only during the local trials
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
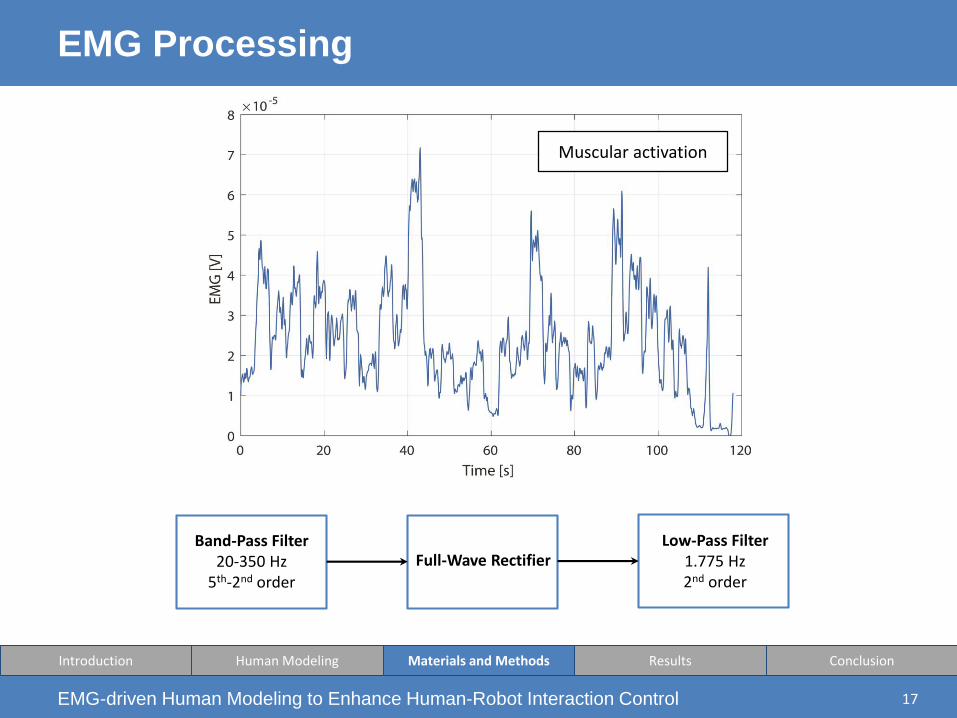
EMG Processing
17
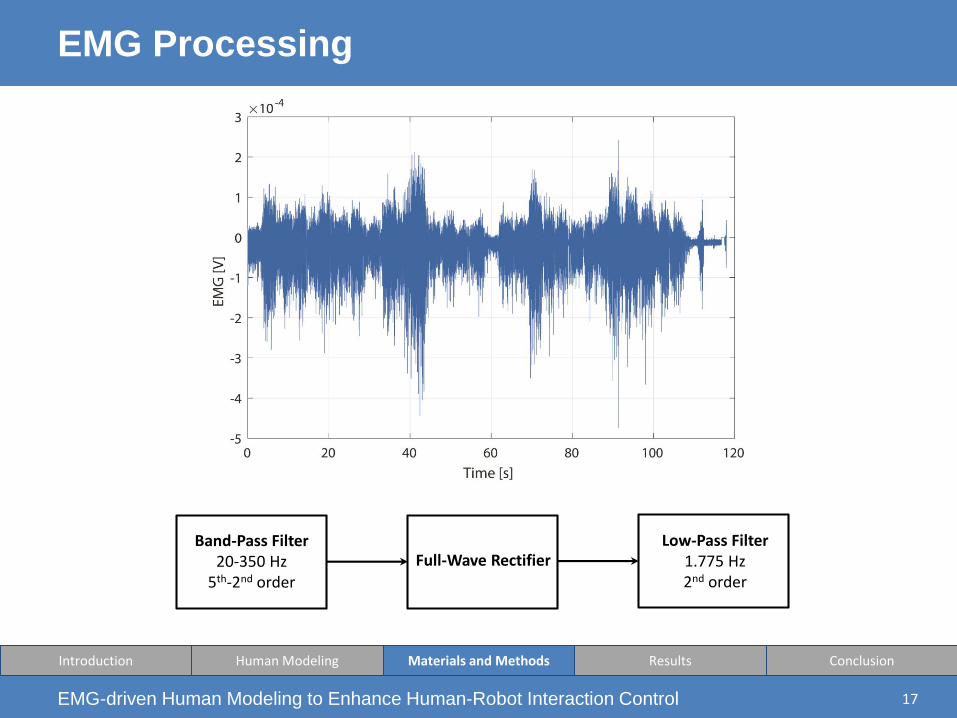
Introduction Human Modeling Materials and Methods Results Conclusion
Band-Pass Filter20-350 Hz
5th-2nd order
Full-Wave RectifierLow-Pass Filter
1.775 Hz2nd order
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
EMG Processing
17
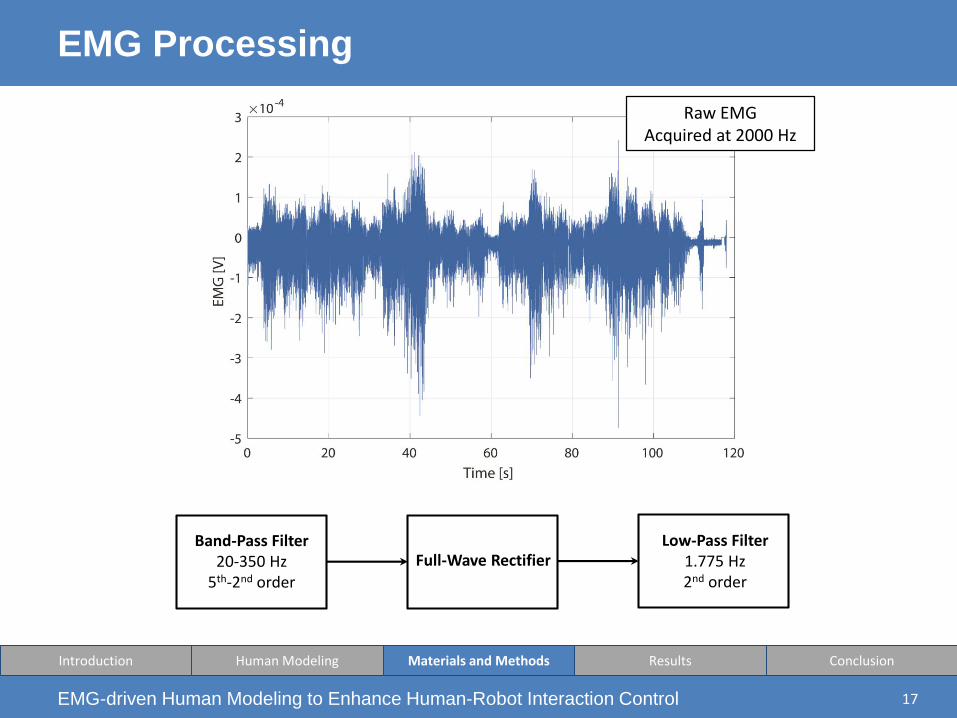
Introduction Human Modeling Materials and Methods Results Conclusion
Band-Pass Filter20-350 Hz
5th-2nd order
Full-Wave RectifierLow-Pass Filter
1.775 Hz2nd order
Raw EMGAcquired at 2000 Hz
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
EMG Processing
17
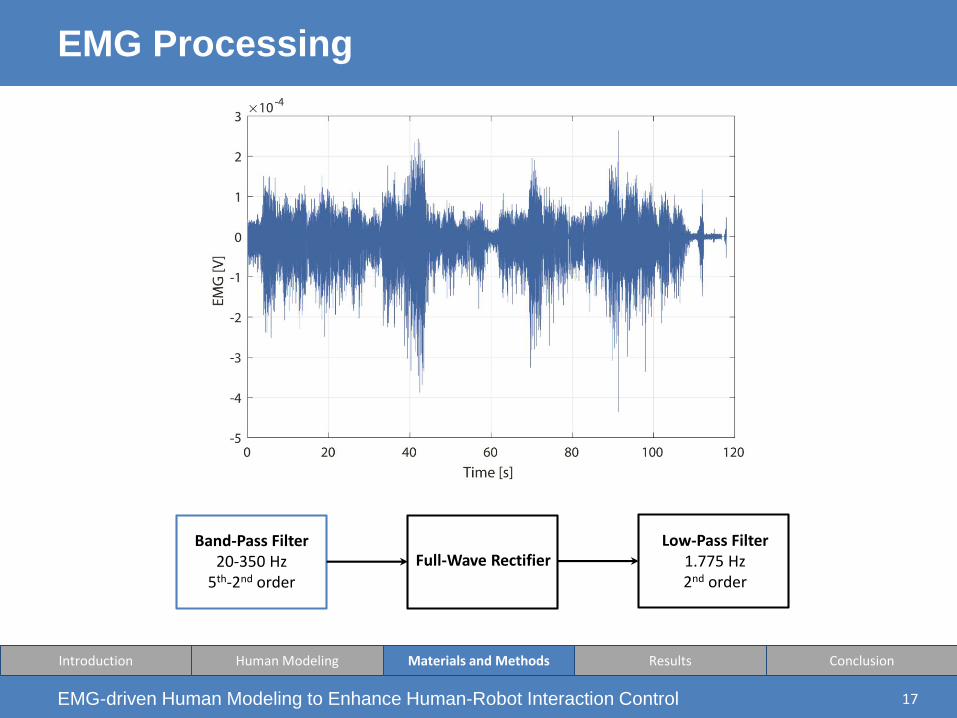
Introduction Human Modeling Materials and Methods Results Conclusion
Band-Pass Filter20-350 Hz
5th-2nd order
Full-Wave RectifierLow-Pass Filter
1.775 Hz2nd order
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
EMG Processing
17
Introduction Human Modeling Materials and Methods Results Conclusion
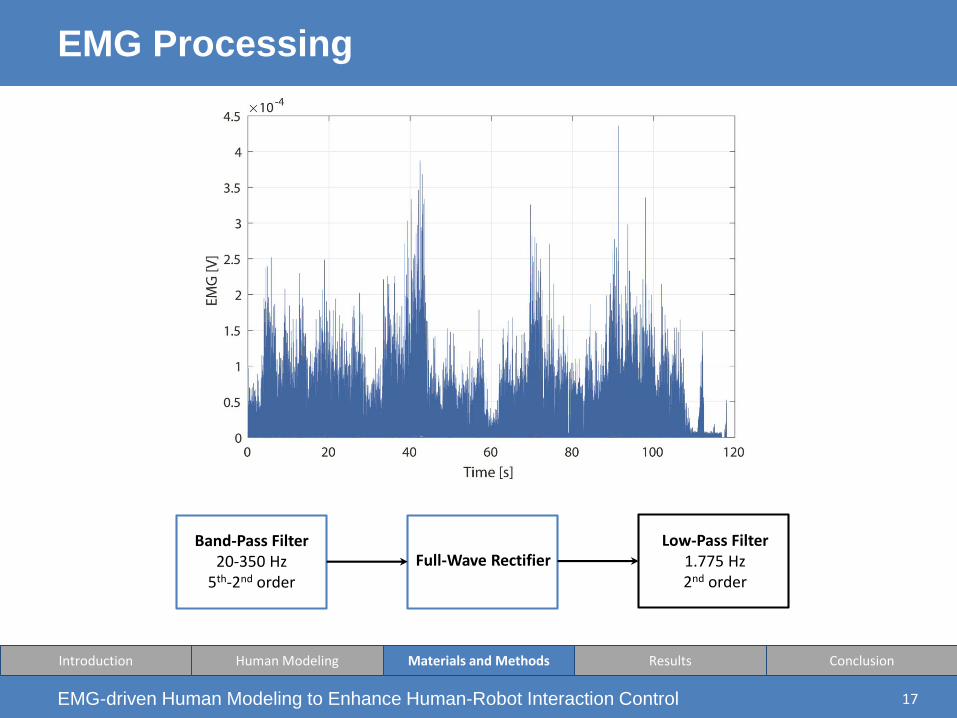
Band-Pass Filter20-350 Hz
5th-2nd order
Full-Wave RectifierLow-Pass Filter
1.775 Hz2nd order
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
EMG Processing
17
Introduction Human Modeling Materials and Methods Results Conclusion
Muscular activation
Band-Pass Filter20-350 Hz
5th-2nd order
Full-Wave RectifierLow-Pass Filter
1.775 Hz2nd order
Muscular activation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
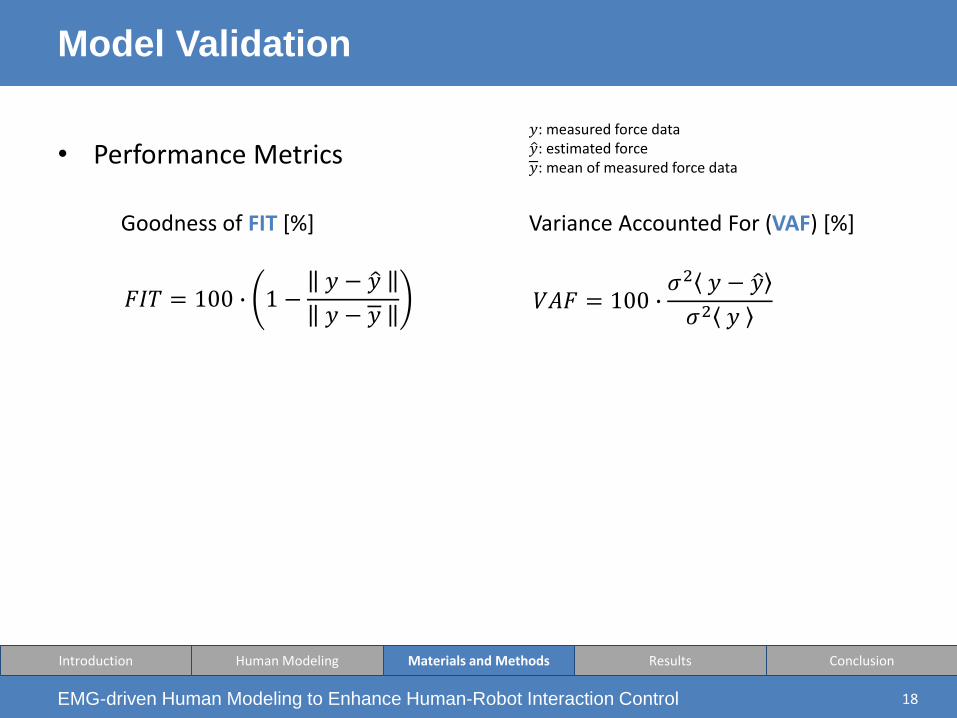
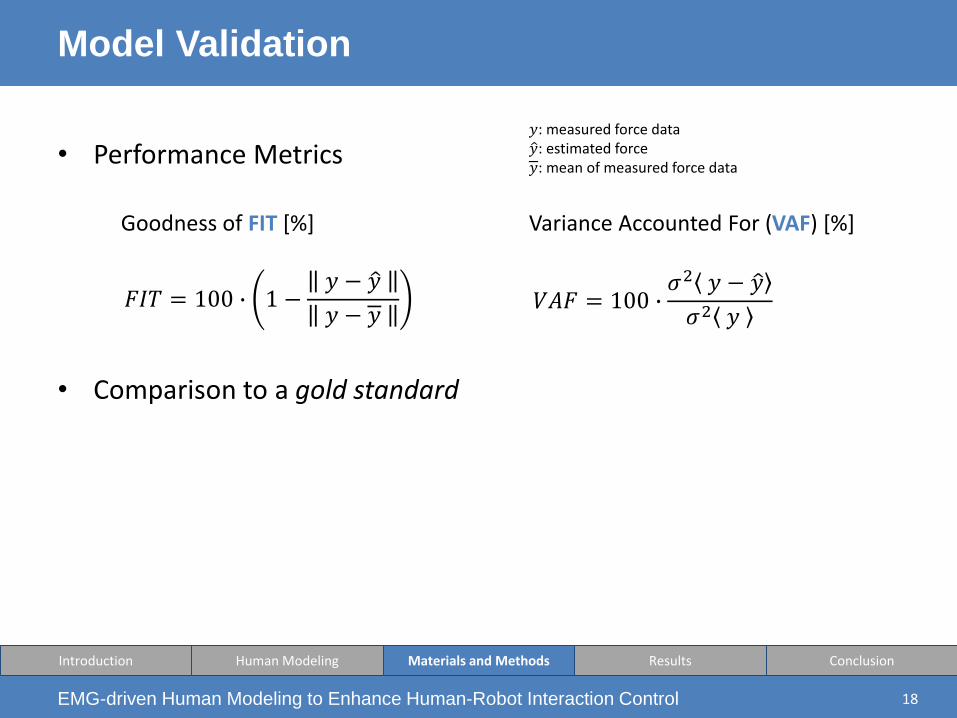
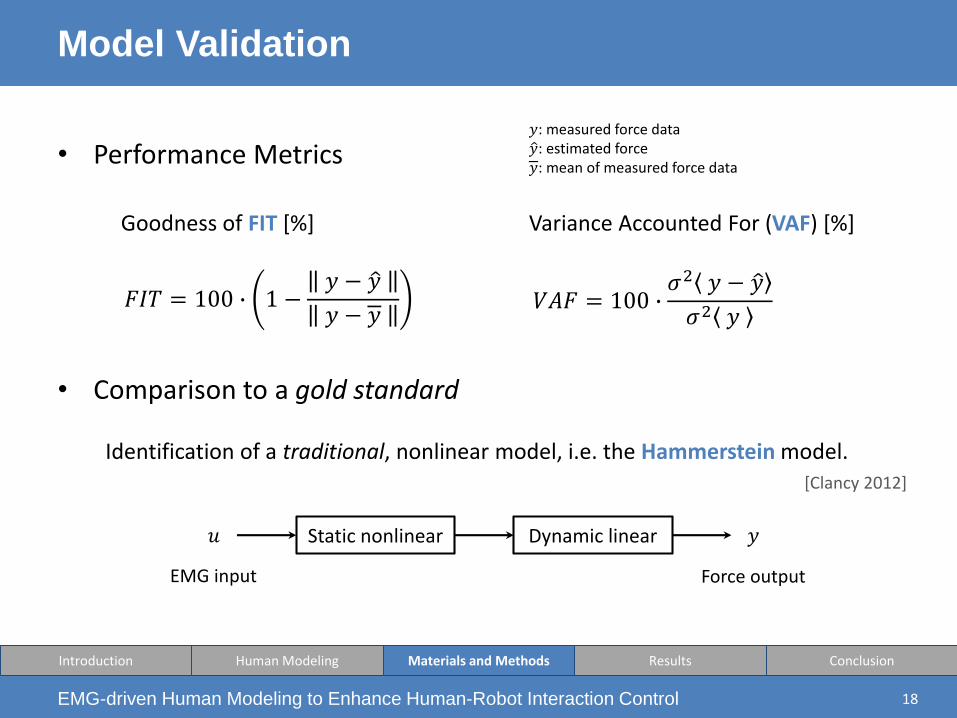
• Performance Metrics
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
• Performance Metrics
𝐹𝐼𝑇 = 100 ∙ 1 −𝑦 − ො𝑦
𝑦 − 𝑦
Goodness of FIT [%]
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
• Performance Metrics
𝐹𝐼𝑇 = 100 ∙ 1 −𝑦 − ො𝑦
𝑦 − 𝑦𝑉𝐴𝐹 = 100 ∙
𝜎2 𝑦 − ො𝑦
𝜎2 𝑦
Goodness of FIT [%] Variance Accounted For (VAF) [%]
𝑦: measured force dataො𝑦: estimated force𝑦: mean of measured force data
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
• Performance Metrics
• Comparison to a gold standard
𝐹𝐼𝑇 = 100 ∙ 1 −𝑦 − ො𝑦
𝑦 − 𝑦𝑉𝐴𝐹 = 100 ∙
𝜎2 𝑦 − ො𝑦
𝜎2 𝑦
Goodness of FIT [%] Variance Accounted For (VAF) [%]
𝑦: measured force dataො𝑦: estimated force𝑦: mean of measured force data
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Model Validation
18
Introduction Human Modeling Materials and Methods Results Conclusion
• Performance Metrics
• Comparison to a gold standard
𝐹𝐼𝑇 = 100 ∙ 1 −𝑦 − ො𝑦
𝑦 − 𝑦𝑉𝐴𝐹 = 100 ∙
𝜎2 𝑦 − ො𝑦
𝜎2 𝑦
Goodness of FIT [%] Variance Accounted For (VAF) [%]
Static nonlinear Dynamic linear𝑢 𝑦
Identification of a traditional, nonlinear model, i.e. the Hammerstein model.
𝑦: measured force dataො𝑦: estimated force𝑦: mean of measured force data
EMG input Force output
[Clancy 2012]
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
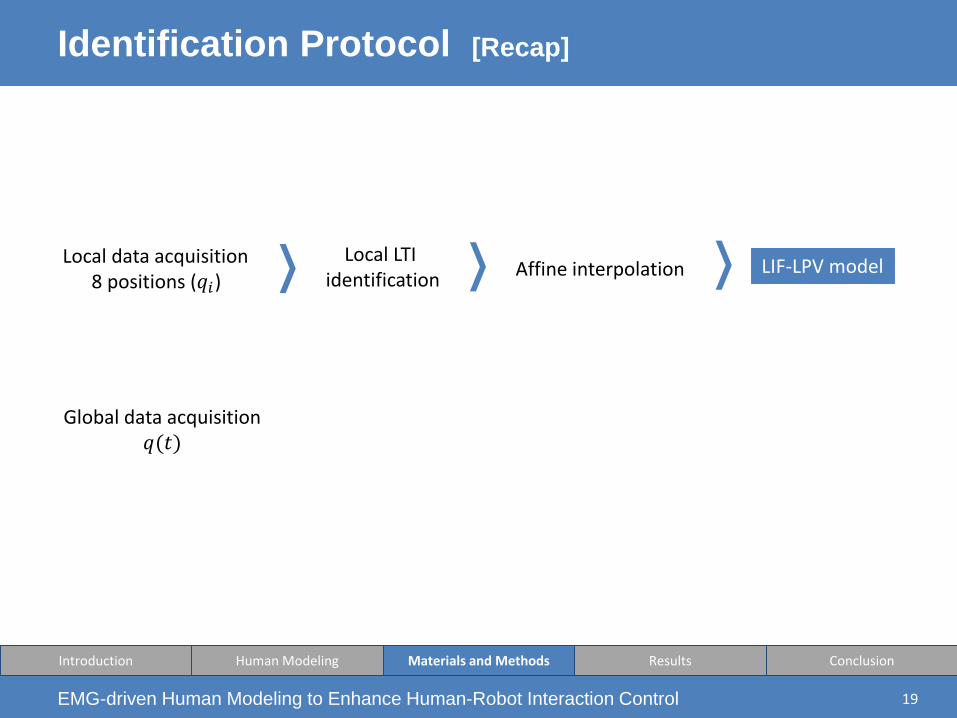
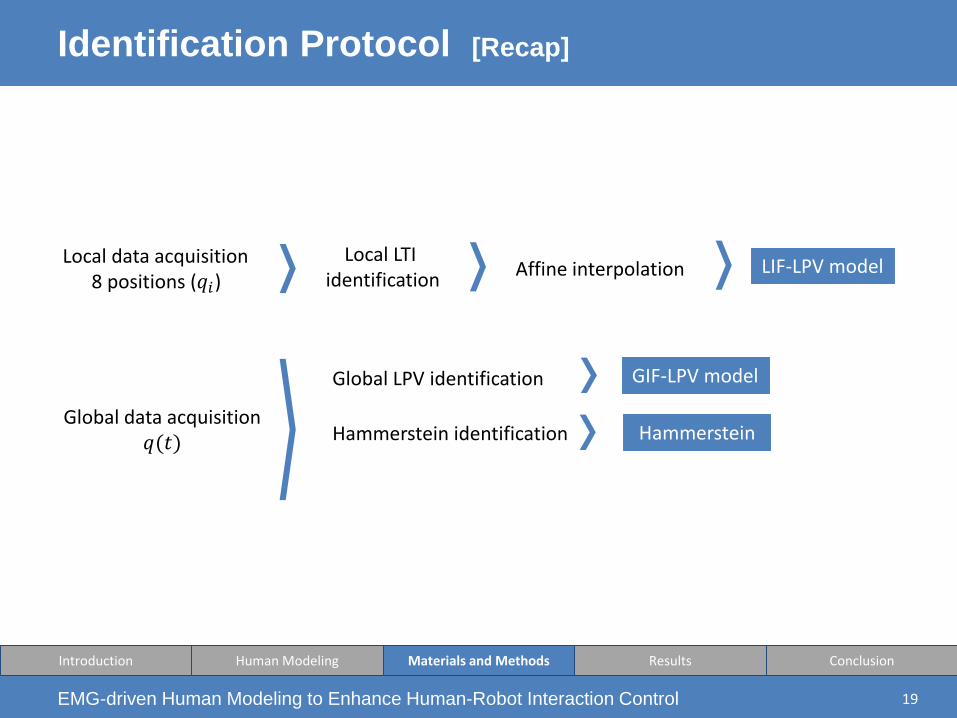
Local data acquisition8 positions (𝑞𝑖)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
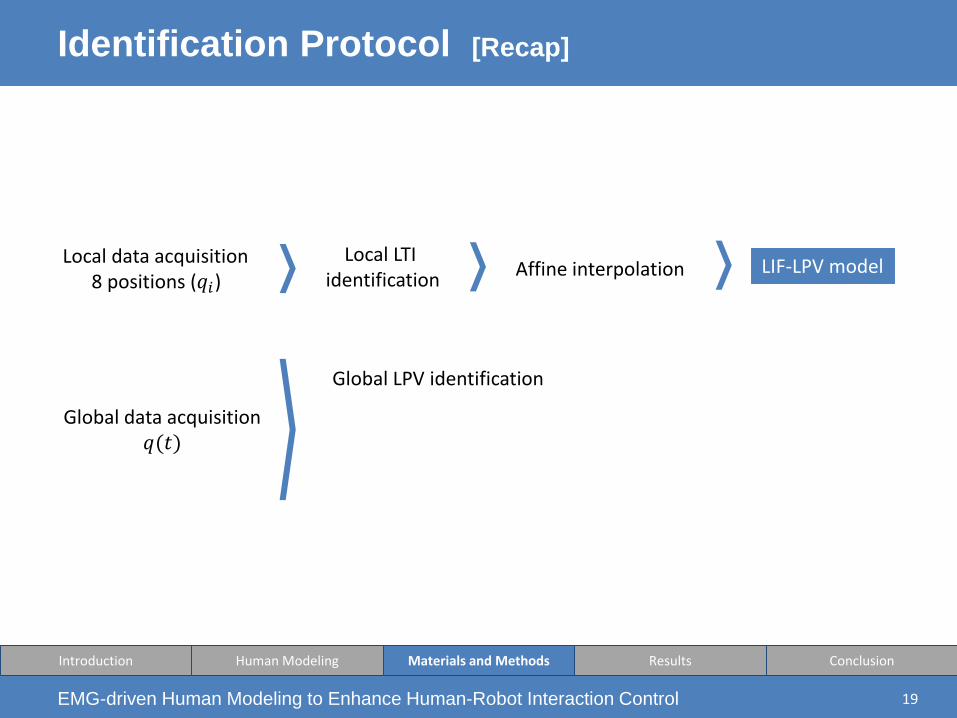
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
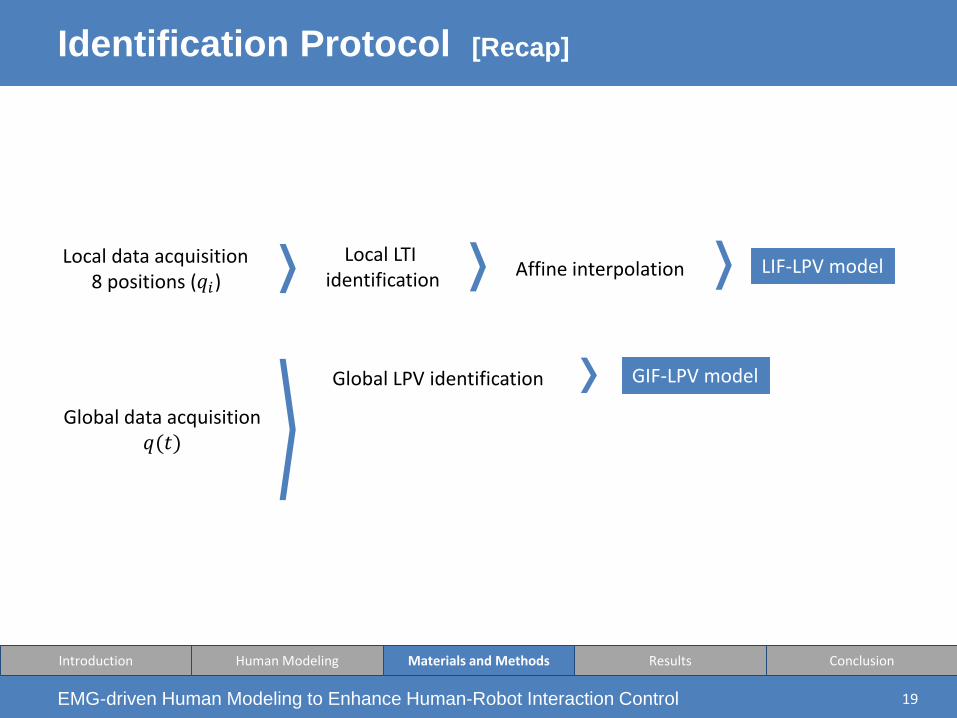
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification GIF-LPV model
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
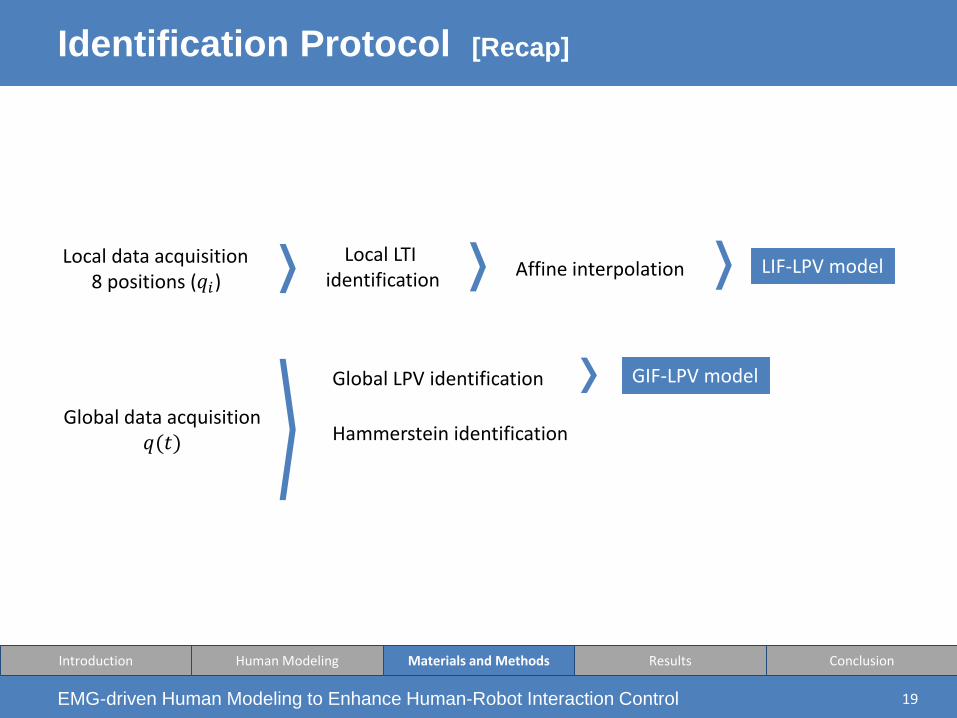
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification
Hammerstein identification
GIF-LPV model
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification
Hammerstein identification
GIF-LPV model
Hammerstein
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
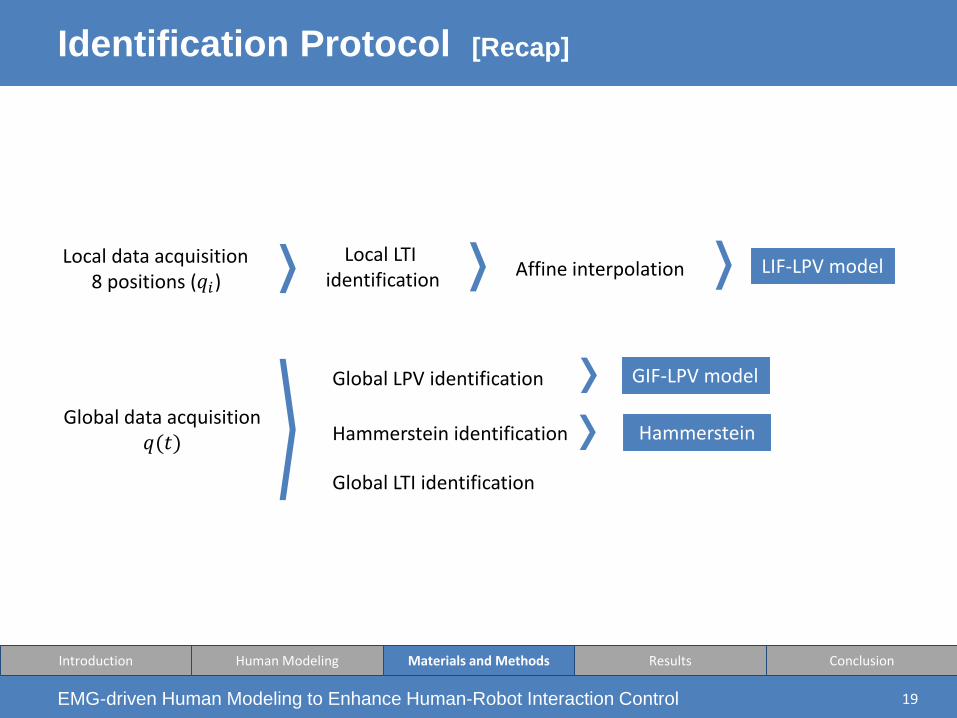
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification
Global LTI identification
Hammerstein identification
GIF-LPV model
Hammerstein
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Identification Protocol [Recap]
19
Introduction Human Modeling Materials and Methods Results Conclusion
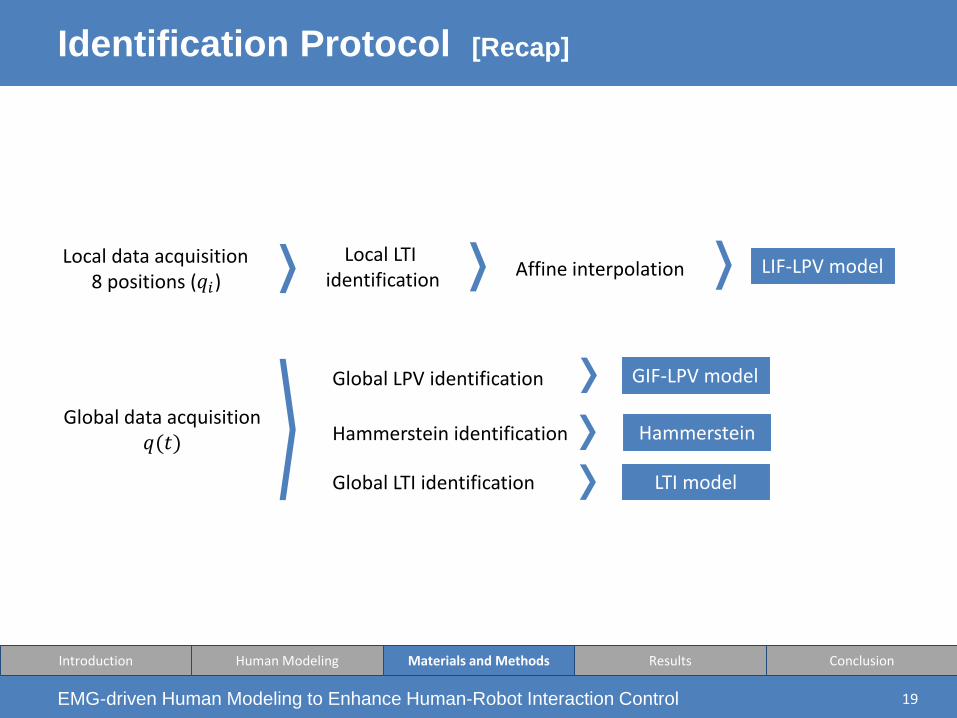
Local data acquisition8 positions (𝑞𝑖)
Local LTI identification
Affine interpolation LIF-LPV model
Global data acquisition𝑞(𝑡)
Global LPV identification
Global LTI identification
Hammerstein identification
GIF-LPV model
LTI model
Hammerstein
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Outline
20
• Introduction
• EMG-driven Human Modeling
• Materials and Methods
• Results
• Discussion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
LIF-LPV Model [Local Identification Framework]
21
Introduction Human Modeling Materials and Methods Results Conclusion
Validation on global trials of the LIF-LPV model identified using local trials by means ofLTI interpolation.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
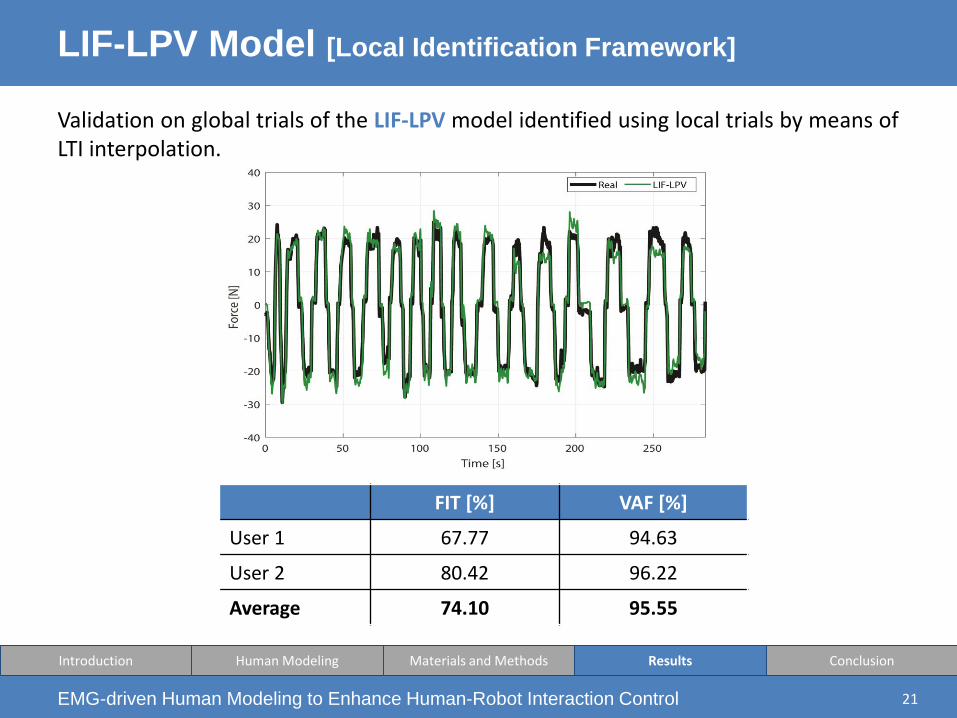
LIF-LPV Model [Local Identification Framework]
21
Introduction Human Modeling Materials and Methods Results Conclusion
Validation on global trials of the LIF-LPV model identified using local trials by means ofLTI interpolation.
FIT [%] VAF [%]
User 1 67.77 94.63
User 2 80.42 96.22
Average 74.10 95.55
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
GIF-LPV Model [Global Identification Framework]
22
Introduction Human Modeling Materials and Methods Results Conclusion
Validation on global trials of the GIF-LPV model identified using one global trial.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
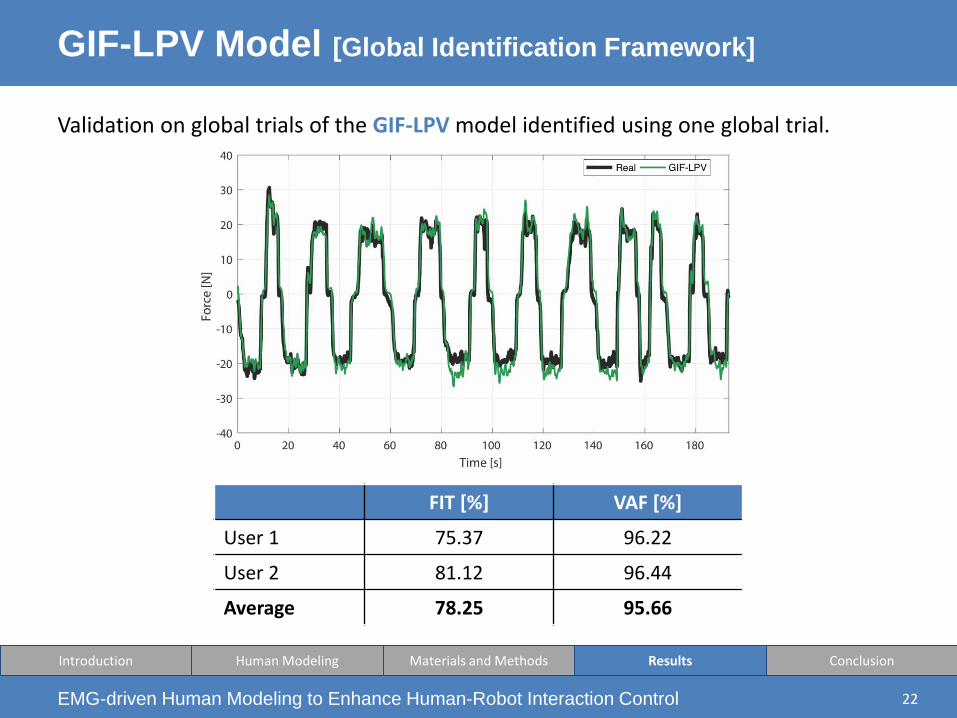
GIF-LPV Model [Global Identification Framework]
22
Introduction Human Modeling Materials and Methods Results Conclusion
FIT [%] VAF [%]
User 1 75.37 96.22
User 2 81.12 96.44
Average 78.25 95.66
Validation on global trials of the GIF-LPV model identified using one global trial.

EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Globally-identified LTI Model
23
Introduction Human Modeling Materials and Methods Results Conclusion
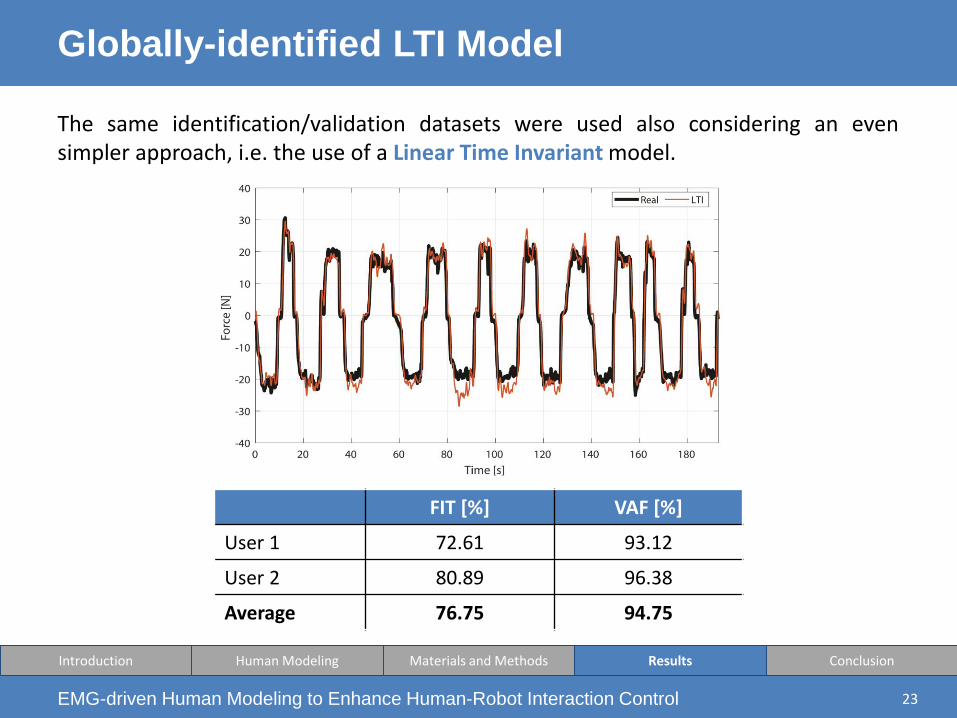
The same identification/validation datasets were used also considering an evensimpler approach, i.e. the use of a Linear Time Invariant model.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Globally-identified LTI Model
23
Introduction Human Modeling Materials and Methods Results Conclusion
The same identification/validation datasets were used also considering an evensimpler approach, i.e. the use of a Linear Time Invariant model.
FIT [%] VAF [%]
User 1 72.61 93.12
User 2 80.89 96.38
Average 76.75 94.75
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Performance Comparison
24
Introduction Human Modeling Materials and Methods Results Conclusion
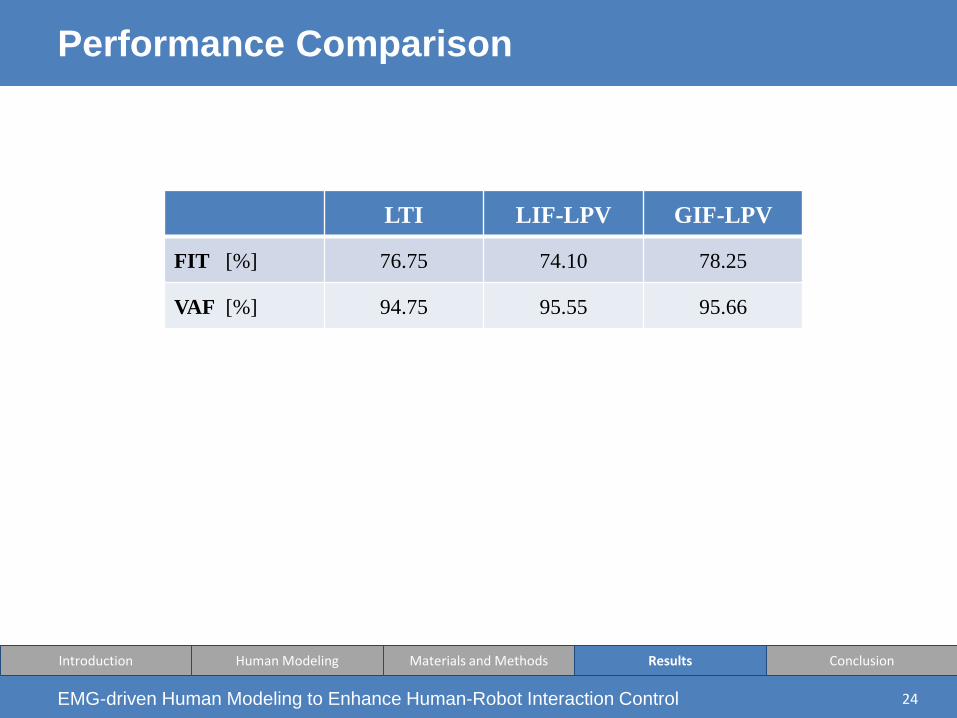
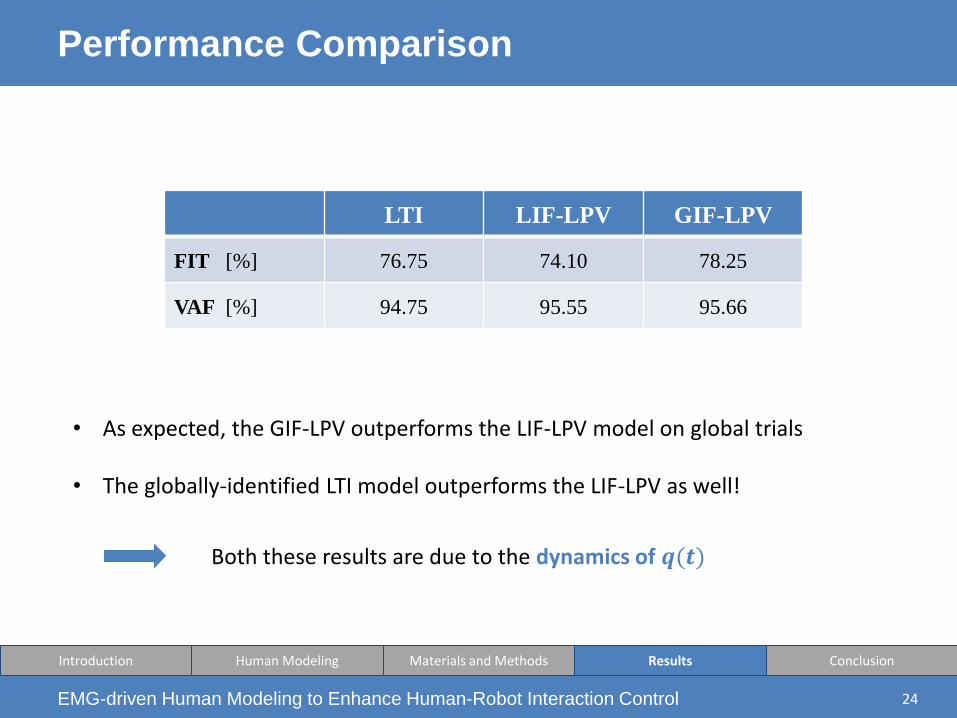
LTI LIF-LPV GIF-LPV
FIT [%] 76.75 74.10 78.25
VAF [%] 94.75 95.55 95.66
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Performance Comparison
24
Introduction Human Modeling Materials and Methods Results Conclusion
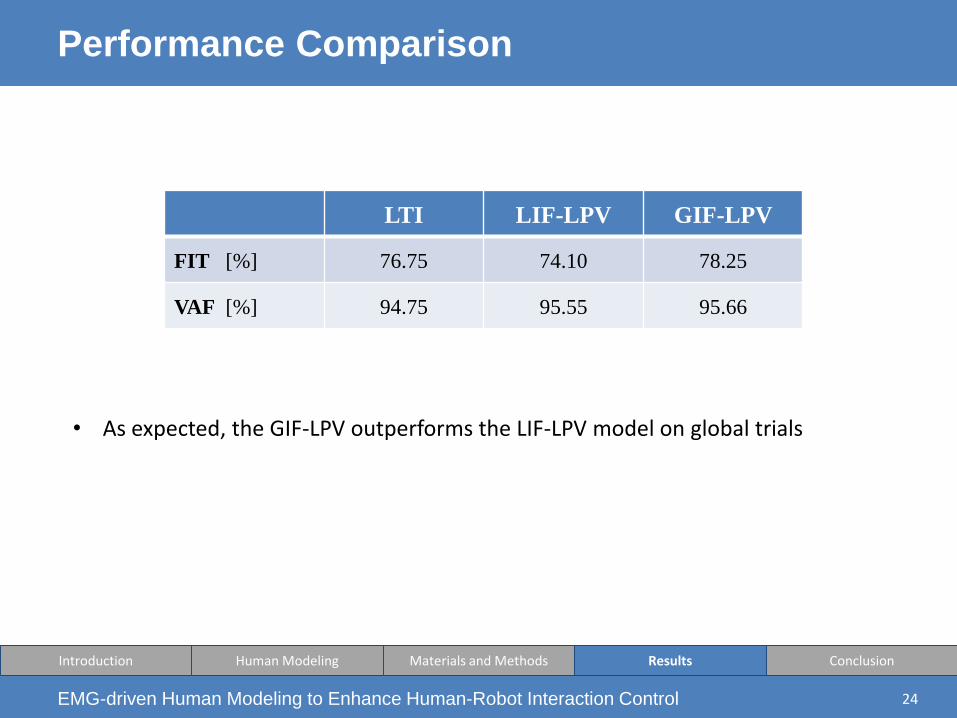
LTI LIF-LPV GIF-LPV
FIT [%] 76.75 74.10 78.25
VAF [%] 94.75 95.55 95.66
• As expected, the GIF-LPV outperforms the LIF-LPV model on global trials
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Performance Comparison
24
Introduction Human Modeling Materials and Methods Results Conclusion
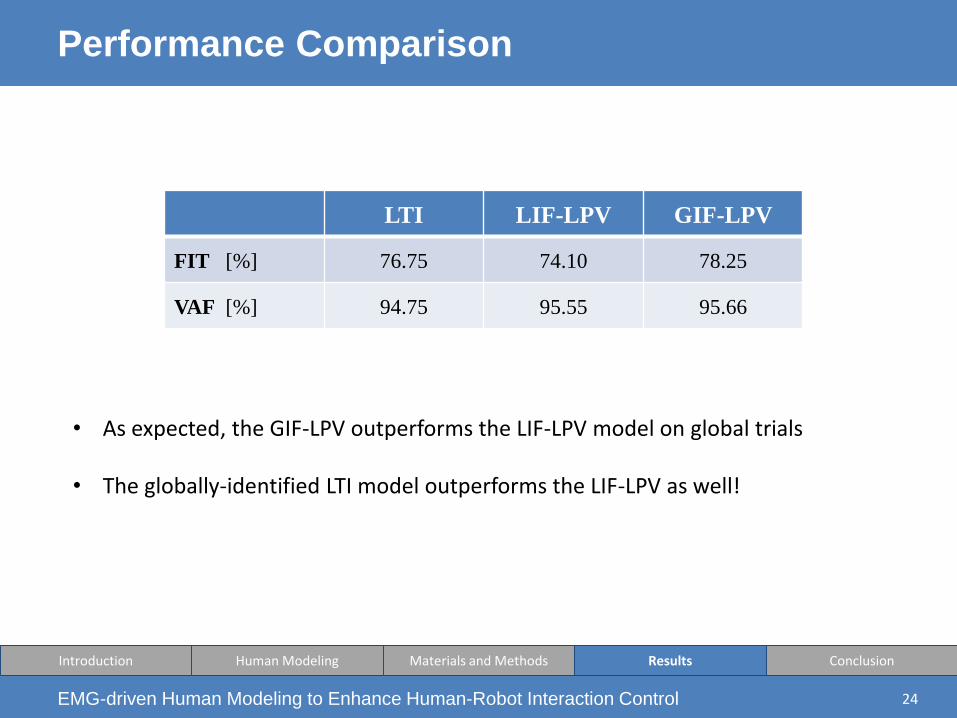
LTI LIF-LPV GIF-LPV
FIT [%] 76.75 74.10 78.25
VAF [%] 94.75 95.55 95.66
• As expected, the GIF-LPV outperforms the LIF-LPV model on global trials
• The globally-identified LTI model outperforms the LIF-LPV as well!
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Performance Comparison
24
Introduction Human Modeling Materials and Methods Results Conclusion
LTI LIF-LPV GIF-LPV
FIT [%] 76.75 74.10 78.25
VAF [%] 94.75 95.55 95.66
• As expected, the GIF-LPV outperforms the LIF-LPV model on global trials
• The globally-identified LTI model outperforms the LIF-LPV as well!
Both these results are due to the dynamics of 𝒒(𝒕)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Performance Comparison
24
Introduction Human Modeling Materials and Methods Results Conclusion
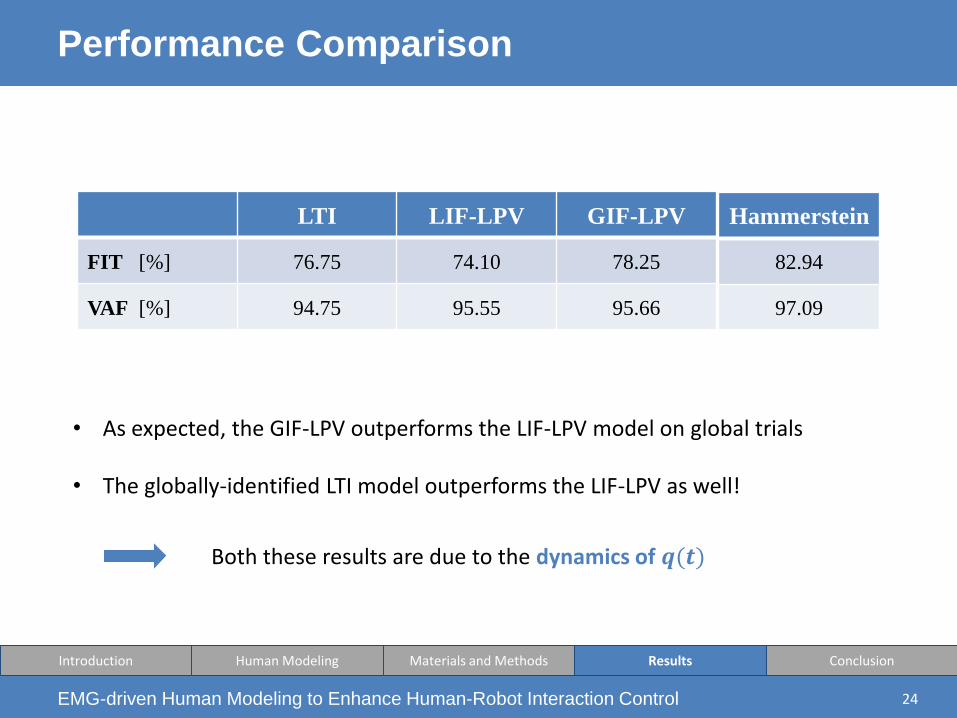
LTI LIF-LPV GIF-LPV
FIT [%] 76.75 74.10 78.25
VAF [%] 94.75 95.55 95.66
Hammerstein
82.94
97.09
• As expected, the GIF-LPV outperforms the LIF-LPV model on global trials
• The globally-identified LTI model outperforms the LIF-LPV as well!
Both these results are due to the dynamics of 𝒒(𝒕)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Outline
25
• Introduction
• EMG-driven Human Modeling
• Materials and Methods
• Results
• Discussion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Conclusion
26
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Conclusion
26
Introduction Human Modeling Materials and Methods Results Conclusion
Low-complexity, control-oriented model of the human arm.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Conclusion
26
Introduction Human Modeling Materials and Methods Results Conclusion
Low-complexity, control-oriented model of the human arm.
Accurate for both constant- and varying-posture trials
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Conclusion
26
Introduction Human Modeling Materials and Methods Results Conclusion
Low-complexity, control-oriented model of the human arm.
Accurate for both constant- and varying-posture trials
Successful LPV modeling of the EMG-Force relationship.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Conclusion
26
Introduction Human Modeling Materials and Methods Results Conclusion
Low-complexity, con𝑡) is fundamental for the model.
arm.
Accurate for both constant- and varying-posture trials
Successful LPV modeling of the EMG-Force relationship.
The dynamics of 𝑞(𝑡) is fundamental for the model.
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Future Developments
27
Introduction Human Modeling Materials and Methods Results Conclusion
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Future Developments
27
Introduction Human Modeling Materials and Methods Results Conclusion
• Acquire more subject (ongoing…)
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Future Developments
27
Introduction Human Modeling Materials and Methods Results Conclusion
• Acquire more subject (ongoing…)
• Optimize the experimental protocol
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Future Developments
27
Introduction Human Modeling Materials and Methods Results Conclusion
• Acquire more subject (ongoing…)
• Optimize the experimental protocol
• Extend the model to the 2-DoF arm
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Future Developments
27
Introduction Human Modeling Materials and Methods Results Conclusion
• Acquire more subject (ongoing…)
• Optimize the experimental protocol
• Extend the model to the 2-DoF arm
• Integrate the model in the controller of the robot
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
The End!
28
Thank you for your attention!
Grazie per l’attenzione!
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Bibliography
29
[1] J. Hashemi et al., EMG-force modeling using parallel cascade identification. 2012
[2] J. Hashemi et al., Enhanced Dynamic EMG-Force Estimation Through Calibration
and PCI Modeling. 2015
[3] E. A. Clancy et. al, Identification of Constant-Posture EMG-Torque Relationship
About the Elbow Using Nonlinear Dynamic Models. 2012
[4] T. Söderström, P. Stoica, System Identification. 1989
[5] R. Tóth et al., Discrete-time LPV I/O and state-space representations, differences
of behavior and pitfalls of interpolation. 2007
[6] P. B. Cox, Towards Efficient identification of linear parameter-varying state-space
models. 2018
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Appendix A | Elbow Angle Dependency
30
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
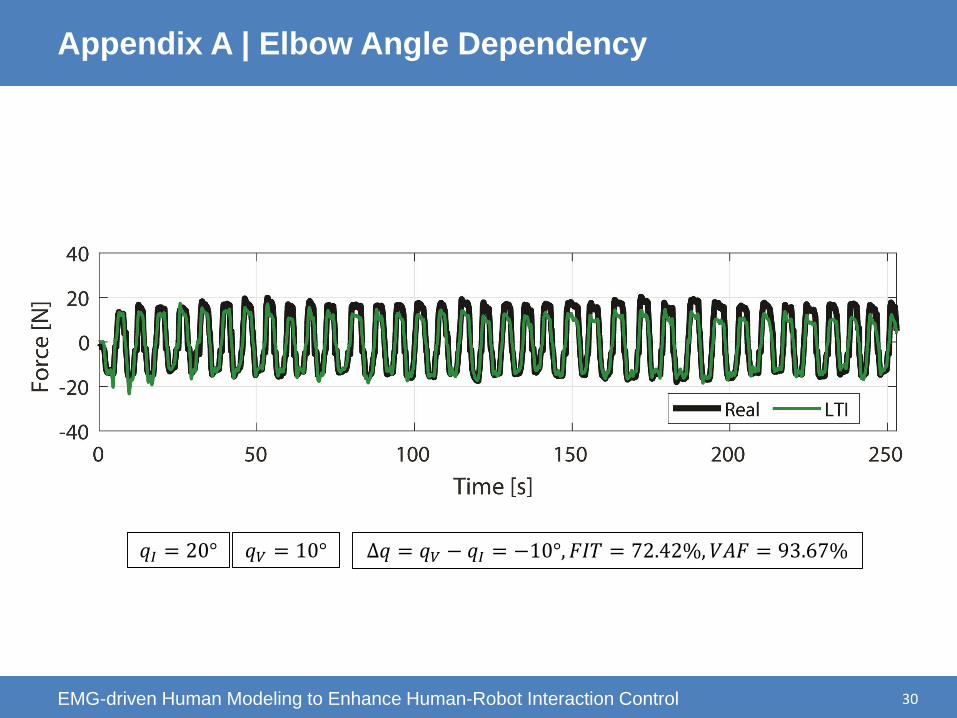
𝑞𝑉 = 10°𝑞𝐼 = 20°
Appendix A | Elbow Angle Dependency
30
Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = −10°, 𝐹𝐼𝑇 = 72.42%, 𝑉𝐴𝐹 = 93.67%
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
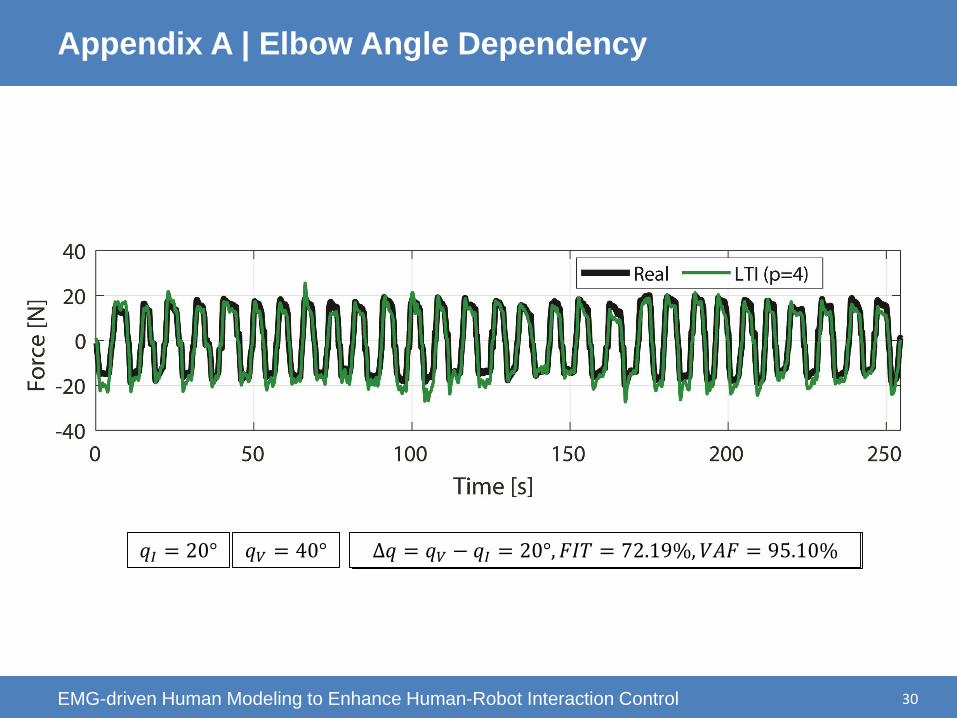
𝑞𝐼 = 20° 𝑞𝑉 = 40°
Appendix A | Elbow Angle Dependency
30
Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = −10°, 𝐹𝐼𝑇 = 72.42%, 𝑉𝐴𝐹 = 93.67%Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = 20°, 𝐹𝐼𝑇 = 72.19%, 𝑉𝐴𝐹 = 95.10%
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
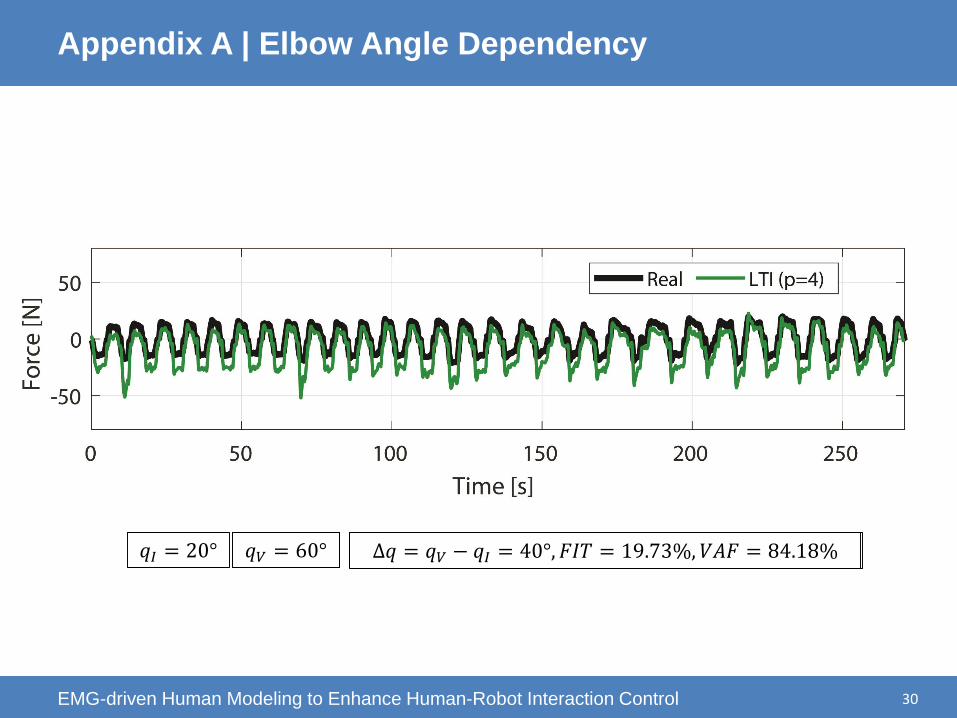
𝑞𝐼 = 20° 𝑞𝑉 = 40°𝑞𝑉 = 60°
Appendix A | Elbow Angle Dependency
30
Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = −10°, 𝐹𝐼𝑇 = 72.42%, 𝑉𝐴𝐹 = 93.67%Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = 20°, 𝐹𝐼𝑇 = 72.19%, 𝑉𝐴𝐹 = 95.10%Δ𝑞 = 𝑞𝑉 − 𝑞𝐼 = 40°, 𝐹𝐼𝑇 = 19.73%, 𝑉𝐴𝐹 = 84.18%
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
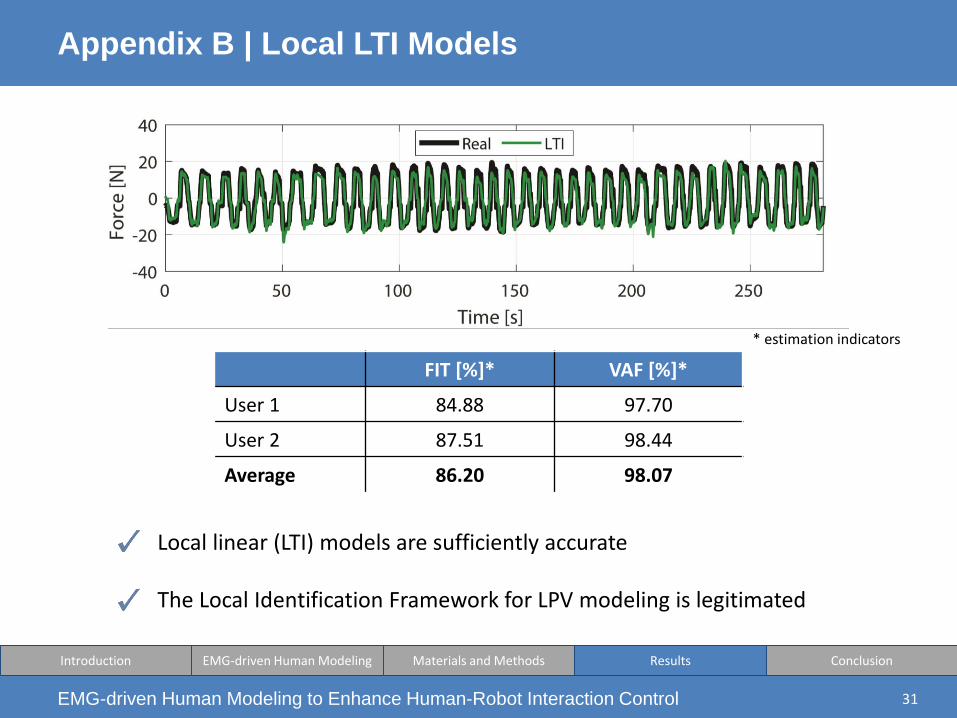
Appendix B | Local LTI Models
31
Introduction EMG-driven Human Modeling Materials and Methods Results Conclusion
Local linear (LTI) models are sufficiently accurate
The Local Identification Framework for LPV modeling is legitimated
FIT [%]* VAF [%]*
User 1 84.88 97.70
User 2 87.51 98.44
Average 86.20 98.07
* estimation indicators
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Appendix C | The Hill’s Model
32
Introduction EMG-driven Human Modeling Materials and Methods Results Conclusion
Phenomenological modeling: the Hill’s model
𝐹: muscular force
𝐹 𝑡 = 𝐹0 𝑓 ℓ, 𝑣, 𝑡 ∙ 𝑎(𝑡) ℓ: muscular length
𝑣: contraction velocity
Muscular force 𝐹 𝑡 ∝ muscular activation 𝑎(𝑡) (computed from the raw EMG)
Proportional to the isometric force 𝐹0
The force is proportional to 𝑓 ℓ, 𝑣, 𝑡
Computationally complex and time consuming
Not suitable for online/control-oriented applications
EMG-driven Human Modeling to Enhance Human-Robot Interaction Control
Appendix D | Clancy’s Polynomial Model
33
Introduction EMG-driven Human Modeling Materials and Methods Results Conclusion
Black-box modeling: the EMG-Force relationship
2. Dynamic, nonlinear polynomial model [Clancy 2012]
• Elbow torque (𝜏) ∝ muscular activation (𝑎)
• Grey-box approach
𝜏 𝑘 =𝑑=1
𝐷
𝑞=0
𝑄
𝑒𝑞,𝑑 𝑎𝑒𝑑 𝑘 − 𝑞 +
𝑑=1
𝐷
𝑞=0
𝑄
𝑓𝑞,𝑑 𝑎𝑓𝑑 𝑘 − 𝑞
𝑎𝑒 : extensor activation𝑎𝑓 : flexor activation