-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
1/31
Florida Institute of Technology
College of Computer and Electrical Engineering
ECE4551 Computer Architecture
Fall 2009
Semester Project Paper:
The Comparative Anatomy and Physiology of Embedded Systems.
By David Wurmfeld
ECE4551 Page 1 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
2/31
Table of Contents
Florida Institute of Technology
....................................................................................1
Abstract
............................................................................................................................
3Fundamental Anatomy of an Embedded Processor
......................................................... 4
The programmable FSM: The idea that became a computer:
.................................. 4
ROM and RAM: memory structures making up the skeleton of an
embeddedprocessor...................................................................................................................
5
The Guts of the Processor: the Program Counter, ALU and Control
Unit..............5
Putting it all together, the big picture:
......................................................................7Fundamental
Physiology of an Embedded Processor
....................................................11
The computer program: a recipe for
functionality.................................................
11
The Program Counter: more than meets the
eye.................................................... 11
The Control Unit: Conductor, logic wizard and traffic Cop:
.................................14110001110011: I dig Computer
Baby Talk!
.......................................................14
Making Bits Work:
.................................................................................................
15
Instruction Encoding; how many bits do we need?
................................................15
Looking Forward: Tools for us Humans:
...............................................................
16Temporary storage: Data
Memory.........................................................................
17
The Arithmetic Logic Unit: Workhorse of the Embedded
Processor....................18Memory Organization and Program
Memory: .......................................................
19
Memory Organization and Data Memory:
.............................................................
21
................................................................................................................................
24
The other fiddly bits: Input Output and additional processor
functionality........24Summary....................................................................................................................
28
Embedded Processor questions to test for understanding:
......................................... 29
Answers
......................................................................................................................
30
ECE4551 Page 2 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
3/31
AbstractAn embedded system is a difficult animal to describe. In
the general interpretation of
the term, an Embedded System refers to a dedicated computer used
to accomplish apre-defined task. The term embedded usually relates
to the encapsulated or contained
nature of the device. In the modern vernacular however its
meaning is becoming lesssharply defined. The current idea of an
embedded system is expanding to mean any
computer system dedicated to a specific purpose. The computer
that is the autopilot ona commercial airliner is considered an
Embedded System, as is the Windows XP
powered console for a medical MRI imaging system.
Today, the domain of an embedded system is almost limitless,
ranging from a full
blown LINUX system deployed on a single VirtexIV FPGAi chip with
a PowerPC
microprocessor core and custom integrated peripherals to a 4-bit
data security chipglued onto the front of a smart bank card.
Indeed, todays embedded systems may not
have any pins to speak of, they may be pre-compiled cores or
software templates
of hardware architectures designed to implement and complement
common computerresources. These cores are purely software in
nature, describing hardware architectureusing a Hardware
Description Language or HDL, and only take on a physical
manifestation when implemented within a particular ASIC or FPGA
scheme. These
cores are often referred to as Intellectual Property or IP. The
domain of the typicalembedded system however is dominated by single
chip microcontrollers with fewer
than a dozen Input-Output (I/O) pins.
To understand the scope of embedded systems then it becomes
necessary to understand
the resources available (chip/core architecture) as well as the
tool chain used to exploit
those resources. This paper will endeavour to describe, using a
top-down approach, the
animal that is the Embedded System; its comparative Anatomy and
Physiology orhow the architecture and behaviours differ between
three different real architectures,
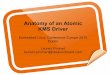
selected by their market share.2006
3.42, 31%
3.9, 36%
3.675, 33%
32-bit 16-bit 8-bit
2007
3.8, 30%
3.9, 31%
4.9, 39%
32- bit 16- bit 8- bit
Microcontroller Market (in Billions of US Dollars) 2006 vs.
20071
According to WSTS2, the lowly 8-bit microcontroller dominated
the microcomputer
chip market with monthly sales toping 250 million units per
month in 2000, followed
1www.emittsolutions.comMicrocontroller market trend report by
Emitt Solutions Inc.2 ExtremeTech
online,http://www.extremetech.com/article2/0,2845,1156706,00.asp,
Embedded
Processors Part one, September 2009, Quoting WSTS, World
Semiconductor Trade Statistics,
http://www.wsts.org
ECE4551 Page 3 of 31 03/12/2009 03:10:58
http://www.emittsolutions.com/http://www.emittsolutions.com/http://www.extremetech.com/article2/0,2845,1156706,00.asphttp://www.extremetech.com/article2/0,2845,1156706,00.asphttp://www.emittsolutions.com/http://www.extremetech.com/article2/0,2845,1156706,00.asp
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
4/31
by the 4-bit microcontroller at 100 million per month. The
so-called hot processors,
16 and 32 bit barely pull in 50 million units per month.
This paper will confine the domain to 8-bit and 16-bit
microcontrollers, concentrating
on how they compare with one another, from the 30,000-foot view
down to the register
level3
. In addition to the anatomy or architecture of the embedded
systems, thephysiology or behaviour, from high level constructs
down to bits in silicon will be
outlined and compared. To synthesize the disparate facts and
processes into meaningful
information, the embedded systems outlined will be compared from
a simpleperformance metric, using a Gedanken experiment4 to explore
the performance of
three hypothetical embedded systems.
Fundamental Anatomy of an Embedded ProcessorThe heart of any
embedded system is the computer core driving it. It manages the
dataflow throughout the system, on chip5 and off chip. This
construct constitutes a
revolution in logic design. Historically, digital logic has been
combined to form
meaningful representations of the world, for example, an alarm
system could bemodelled by representing the doors and windows to be
monitored as elements in thedesign, using registers and states to
describe the behaviour when a door or window is
opened at the wrong time. These so called Finite State Machines
(FSM) were used to
create the original embedded systems, with dedicated chips
implementing logicfunctionality (NAND, NOR) all interconnected pin
to pin to accommodate the data
flowing into and out of the machine. This dedicated
functionality proved cumbersome
for anything but complex control systems, custom designed for a
single, specific task.Difficult to design, produce and maintain, a
different solution was needed.
The programmable FSM: The idea that became a computer:
Early in the history of electronic devices the idea of a
re-configurable system to use thesame hardware to accomplish many
different tasks was developed. This so-called
compute-or idea first took shape in 1936 as the Z1 computer
designed by KonradZuse6. The first re-configurable or programmable
machine, Doctor Zuse is credited
with designing and building the first machine to truly solve
floating-point problems
using binary representation7. With these initial architectures
and the technologicalrevolution of the transistor, the physical
manifestation of a computer shrunk from room
sized behemoths to refrigerator sized boxes down to a single
board comprised of only a
few chips.
Like its predecessors, the computer needed all the elements of a
traditional Finite State
Machine with a new twist; the ability to change states by
following bit patterns; bitpatterns found in configurable
structures, structures not hard wired into the design.
3 For the purposes of this paper, we are taking as faith the
silicon topologies and processes used to
implement registers work and are well described in other tomes.4
Thought Experiment:
http://en.wikipedia.org/wiki/Thought_experiment5 For the initial
part of this discussion, we will refer to a chip as the fundamental
embedded system
building block. Later we will expand that definition to include
the concept of a microcontroller core.6 About.com: Inventors -
http://inventors.about.com/library/blcoindex.htm7 Technical
Institute of
Berlin;http://user.cs.tu-berlin.de/~zuse/Konrad_Zuse/index.html
ECE4551 Page 4 of 31 03/12/2009 03:10:58
http://user.cs.tu-berlin.de/~zuse/Konrad_Zuse/index.htmlhttp://user.cs.tu-berlin.de/~zuse/Konrad_Zuse/index.htmlhttp://user.cs.tu-berlin.de/~zuse/Konrad_Zuse/index.html
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
5/31
This created the possibility of a new state machine paradigm,
one of an InfiniteStateMachine.
ROM and RAM: memory structures making up the skeleton of an
embedded processor.This new topology could execute a
pre-configured programmed sequence of
states based on the contents of two new hardware constructs:
read-write volatile datamemory and read-mostly program memory. The
term volatile data memory refers to
memory that will not retain its contents after the power is
removed. The term Readmostly memory refers to memory that can be
pre-configured or programmed with asequence of bits (bits, that we
will later see are the patterns that represent computer
instructions) that is persistent or non-volatile and will be
available after the power has
been removed. For the sake of brevity and tradition,
non-volatile memory is referred toas ROM8, whereas volatile memory
is referred to as RAM9.
The Guts of the Processor: the Program Counter, ALU and
ControlUnit.
Keeping with the comparative anatomy theme, every computer is
built using these two
memory structures in one form or another. They are used to
provide long and short-term storage for data and instructions. The
third element necessary to the operation of
the computer is the control unit. It is a multi-function module
that controls and
synchronizes the flow of data from the outside to the inside,
and between memoryelements and the outside world.
Like a policeman directing traffic, the control unit directs
when and where data willmove. It also records state information for
use by other operations. The key to the
control module is the program counter or PC. It is a special
purpose register10 that holdsthe memory address of the next
instruction to be executed. The width in bits of the PCcorresponds
to the maximum number of instructions that can be addressed by
the
computer.
The number of instructions that can be addressed is n2
locations. The control module
fetches the instruction from ROM, pointed to by the PC. It then
translates the
instruction into a sequence of control signals that route the
data from and to theappropriate location.
8 ROM is the acronym for Read Only Memory, meaning not writable
but readable. In practice, these
memories are writable at least once, to configure the memory.
Typically, they are implemented usingFLASH technology, allowing
multiple write cycles using proper programming equipment.9 RAM is
the acronym for Random Access Memory, which is a misnomer as all
addressable memory is
random access by definition. It traditionally refers to memory
that looses all data when the power is off,
and is typically of a static or dynamic nature.10 A register is
a fixed width, volatile memory element, used to store intermediate
information. This
information may be the next address to execute, or the flag bits
used to configure the built in A/D
converter.
ECE4551 Page 5 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
6/31
The next module important to the operation of the computer is
known as the
Arithmetic-Logic Unit or ALU. It is responsible for performing
various arithmetic
operations on the data, like addition or subtraction as well as
various logic operationslike AND, OR, and NOT. In more
sophisticated microcontrollers, the ALU may also
include a perfect exchange register, where word-oriented
operations can be carried
out, like swap bytes, swapping the upper and lower bytes of the
word, or swapnibbles; single cycle operations11 that make short
work of bit intensive operations. The
ALU can also test data for various states for the control unit
to record. All ALU
operations are directed by the control unit, which is in turn
directed by the instructionsfound in the program memory.
The following structures are the building blocks of all embedded
computer systems:
Program memory read mostly, stores instructions and constant
data (data
that does not change over time). Non-Volatile, data is retained
after the power
is turned off. Typically it is organized as an addressable
matrix of x bytes,
where is the memory address width and represents 2
locations, and represents 1 or 2 bytes of memory width.
Data memory read/write; stores the results of instructions and
stateinteractions. Volatile, looses all data when power is turned
off. Typically it is
organized as an addressable matrix of x bytes, where is the
memory
address width and represents 2 locations, and represents 1 or 2
bytes ofmemory width.
Program counter a special purpose volatile memory element
(usually a
dedicated register) that holds the address of where the
processor is in itsinstruction sequence, usually the address of the
next instruction to be
fetched12 executed. The width of the PC corresponds to the
maximum number
of instructions the computer can hold. Control unit A dedicated
Finite State Machine (FSM) that takes as its inputs
the instruction from the program memory, translating the bit
pattern into actions
manifested as synchronized control signals and states to the
other modules in
the computer.
Arithmetic-Logic-Unit A dedicated FSM that takes as inputs
control signals
and chunks of data13 (usually whole bytes or words14) and gives
as outputs the
results of the operation, in similar chunks of data.
11 It will be seen that embedded processors are theme oriented,
that is as a motor controller, or
communications controller or a sensor controller, and the
architecture correspondingly includes specialfunctionality (read
dedicated registers/operations) that make those features efficient
compared to doing
it manually in software.12 The term fetch normally associated
with a ball and the family dog is a good analogy in this
context
as the verb describing the action of retrieving the instruction
from program memory. It involves looking
it up, getting it physically and bringing it back.13
Historically, the term data word is the fundamental width of the
registers and program memory
native to the microprocessor. In the domain of processors we are
outlining, it dependent on the
architecture. Wikkipedia:
http://en.wikipedia.org/wiki/Word_%28computing%2914
ECE4551 Page 6 of 31 03/12/2009 03:10:58
http://en.wikipedia.org/wiki/Word_(computing)http://en.wikipedia.org/wiki/Word_(computing)
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
7/31
The anatomy of any embedded processor is made up of these five
modules. It is the
way in which these elements are arranged that ultimately
describe the behaviour or
how a specific controller actually executes a program of
instructions. The next sectionexplores the fundamental physiology
or how it actually works, of an embedded
processor.
Putting it all together, the big picture:
All embedded processors we encounter have various combinations
of RAM, ROM and
register resources. Typically, for the domain of embedded
processors we are exploring,
this memory will reside physically on the silicon from which the
chip15 is
constructed.
Figure 1 photomicrograph of physical microcontroller elements on
silicon die.16
Other types of embedded processors have enough pins to support
accessing memoryoff chip. Starting out, we will address those
topologies that have memory built into the
chip. The following figures illustrate three different embedded
processors, the ARM-7,
the Atmel 89C2051 and the Microchip PIC18F1330 8-bit
microcontrollers. Starting out
lets look at the anatomy of these processors.
In Figure 4, the PIC18 processor, it is easy to identify the
modules we have described
so far, ALU, Program Counter, Control Unit Instruction Decode
and Control,Program Memory and Data Memory. You will also notice
there are many other
modules in the processor we havent discussed yet but may be able
to guess at the
15 The word chip is loosely used to mean those devices built
from chips of silicon wafer, mounted
onto a leaded carrier, providing the pins that allow connection
to the circuit.16 Image copyright 2009 Micro Control Journal. All
rights reserved.
(http://www.mcjournal.com/articles/arc105/arc105.htm)
ECE4551 Page 7 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
8/31
functionality. Suffice it to say they all support the movement
and modification of data,
which ultimately is the only purpose of any processor, embedded
or not.
The other processor illustrations are not so straightforward to
interpret. In Figure 2, it isclear what the data and program memory
is, the ALU and program counter as well but
where is the Control Unit? It is there, just split into several
blocks, each illustrating a
function the control unit must accomplish, like PC incrementer,
program addressregister and stack pointer. As long as you
understand these functions are common
to all embedded processors, it is not difficult to interpret the
block diagram of any
microcontroller.
Figure 2: Atmel 89C2051 Architecture17
The diagram in Figure 3 stretch the simple block diagram
concept, but with some
digging it is possible to catch the islands of functionality18.
In the CPU diagram, itlays out a stylized arrangement of registers,
implying interconnection and the existence
of a control unit connecting them all. As this is a model of the
CPU core, the memory
is not illustrated. The memory is laid out a little differently,
both the program and datamemory share the same address, but the
program counter and flag register are clearly
there along with many other, yet to be understood specialized
registers. We will get to
those later; for now the important idea here to grasp is
although it may seem like these
17 Image 2009, Atmel,
http://www.atmel.com/dyn/products/product_card.asp?part_id=193818
Islands of Functionality refer to isolated group of registers, FSM
and other structures that perform a
single job, like the ALU, a timer, or an A/D controller
module.
ECE4551 Page 8 of 31 03/12/2009 03:10:58
http://www.atmel.com/dyn/products/product_card.asp?part_id=1938http://www.atmel.com/dyn/products/product_card.asp?part_id=1938
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
9/31
three processors are dramatically different, they actually
differ only by the specifics of
how the various modules interact, and not so much by the modules
they have.
Figure 3: The ARM-7 core architecture
ECE4551 Page 9 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
10/31
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
11/31
Fundamental Physiology of an Embedded Processor Now that we have
outlined the structure of the building blocks of an
embeddedprocessor, (memory, ALU, Control Unit, PC) and briefly
illustrated some real
processors, it is time to describe their inner workings, i.e.
how they behave with one
another. Once the general ideas of structure (anatomy) and
function (physiology) are
understood we can proceed to take a comparative look at how
examples of actualembedded processors work performing similar
tasks.
The computer program: a recipe for functionality.
Although trivial in concept, it bears repeating. A computer
follows a list of
instructions, starting at the beginning and executing each
instruction until theend of the recipe or program. From our
previous glimpse into the anatomy of an
embedded processor, we know the program memory (ROM) stores the
program
instructions in an addressable matrix of bytes or words. The
Program Counter (PC) hasthe vague job of knowing which instruction
to execute. It is the job of the control
unit to know where to start the program (the beginning), fetch,
decode and execute the
instruction and as long as it isnt the last instruction (the end
of the program), advanceto the next instruction, execute it and so
on
The Program Counter: more than meets the eye.
In Figure 5 we see our first look at a generic computer,
complete with program
memory, control unit and program counter. The program counter is
connected to theprogram memory via the program memory address bus.
The output of the program
memory goes directly into the control unit. The program counter
is also connected to
the control unit. At any one moment in time, any computer is in
the middle of a finiteset of cycles, performing mundane tasks
like:
Calculate the address of the next instruction
Load the address of the next instruction in the program
counter
Enable the program memory to use the address the PC is
presenting
Get the value of the memory location (Fetch the instruction)
For the time being we will focus on these simple but vital
tasks. Somehow, the control
unit is smart enough to know what the next address is to fetch
the next instruction.
The key to understanding how something works is to walk a mile
in its shoes as it
were, to follow it step by step as it does its job. Lets
consider a simple scenario withtwo questions. What actually happens
when an embedded processor20 is powered upand how does the control
unit orchestrate these events?
As we are dealing with events that take place in time, it is
traditional to illustrate theseevent relationships that happen in
time or in synchrony with a waveform chart. A
20 From this point forward, the term processor or embedded
processor or computer will all refer to
the same thing.
ECE4551 Page 11 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
12/31
well-organized chart can illustrate in a single picture what
would take pages of text to
describe.
The following is a generic power up sequence that could apply to
almost any embedded
processor. It is organized as several rows, each representing a
particular signal as it
changes in the time domain. The signal may represent an actual
voltage, or a logicalstate, for example 0V to 3.3V, or asserted or
not asserted21. The row images of the
waveform are linked in time, that is they all start at the same
time, and important events
are usually labelled. In this example, the first row represents
a logic condition of powerbeing applied, (the lower line
illustrates the zero or off condition, and the upper line
represents the high or on condition) rather than its actual
voltage value(s). Important
here is the idea that not all signals are valid at all
times.
The first few hundred microseconds of life: the power up
timingwaveform.
POWER power stableRESET Reset StartCLOCK clock stableADDRESS
INST DATA FETCH Cont
Fetch 1st Instructionf
Power on sequence:
1. Power is applied to the chip (The beginning of time as the
chip sees it)
2. The reset signal is asserted, holding the chip in a reset
state.
3. In the reset state, nothing happens within the computer, but
the computer cycleclocks start oscillating and everything is
poised, just waiting for the reset to be
released. This is one of the most important times for a
computer, without it, the
control unit and program counter would be in unknown states22,
and could cause thecomputer to go haywire, not knowing what state
it is in, or where to go next.
21 It is more accurate to use the term asserted/not asserted to
indicate the value of a particular state. 1or 0, or true or false
can all imply an implementation of a state. A logic 0 may be
represented by
anything less than 0.9 VDC in a 3.3V system, and represents the
assertedorenabledstate of a processor
reset signal, which would be logically true for its value.22 By
unknown state, consider what is physically happening in time when
power is first applied to a
transistor circuit. This all happens on the time scale of pico
and nanoseconds, but when dozens of
transistors are linked together, it can take hundreds or
thousands of nanoseconds to settle down into a
known state
ECE4551 Page 12 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
13/31
Putting the computer in the reset condition gives the processor
the time it needs to
turn on and set up the physical transistors that make up the
hardware to known
conditions, subsequently initializing the control unit to a
known state.4. Some time after the power is applied and stable
(that is, within the operating range
of the processor), the system clock(s) have started and are
stable, the reset signal is
released, and the control unit starts from its initial state.
All this happens in a shortperiod of time to us (2 5 milliseconds),
a lifetime to a processor that can execute a
half a million instructions in a second.
5. The control unit loads a pre-defined address (processor
dependent) into theprogram counter andfetches the first instruction
from program memory. The word
fetch12 is often used to describe this control unit cycle, and
can be summarized
with the following steps:
a. Start the fetch cycle:b. Using a FSM, assemble the pieces
that will make up the next instruction
address. In the case of the first instruction location, no
calculation is
necessary, it is a fixed location, just use that address.
c. On the appropriate system clock edge
23
, logic OR the address pieces
24
together and load the assembled new address into the program
counter.
d. Enable the new instruction address from the program counter
onto theprogram memory address bus.
e. Synchronized with the appropriate clock, and after there has
been enough
time for the address to be stable and valid, (the last thing you
want is the
address changing while you are trying to read an instruction
from programmemory) enable the program memory output onto the
instruction bus.
f. Synchronized with the appropriate system clock, read the
instruction into a
holding register within the control unit.g. Set the increment
next instruction address increment value to be added to
the current instruction address when the next fetch cycle
starts.
h. Fetch cycle complete, the control unit now has fetched the
instruction fromthe program memory.
6. The control unit is ready to decode the instruction fetched,
execute it and start the
fetch cycle all over again.
23 For this overview, we are playing fast and loose with the
necessity of system synchronism. Assume on
faith that every processor cycle that is executed is done in
time and in sync with a clock, or clocks, or
portions of a clock to insure the data is taken or arrives where
it belongs when it is valid to do so.24 The pieces referred to will
be described in detail later, suffice it for now the pieces may be
an offset
from the current location and the previous location, along with
any increment pending.
ECE4551 Page 13 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
14/31
DataMemoryProgram
MemoryPC
ALU
I/O
Port
CU
Buses
Figure 5 Control Interconnections
As you can see, there is more to the program counter than meets
the eye; it is thesignpost the entire computer uses to keep track
of where it is in the instructionsequence. It is a lot more than
just a simple placeholder; it is an integral player in the
instruction fetch cycle as well as an essential element for
proper program execution.
The Control Unit: Conductor, logic wizard and traffic Cop:
Up to this point we have glossed over many inner workings of the
computer, limiting
our focus on just how does the computer know what instruction to
do next. Do notloose sight of the big picture:
There is a program stored in instruction memory (ROM)
This ROM holds the instruction sequence that is the program to
be executed,
whatever that means. The control unit is stuffing the program
counter with addresses, fetching
instructions and doing something with them.
The next part of our discussion of embedded processor physiology
is how the control
unit knows what to do with the instruction it fetched from the
program memory.
The Control Unit is the very heart of any embedded processor.
Ultimately it is
responsible for knowing what instruction to fetch next, how to
fetch it, set up for the
next instruction, decode and execute the instruction just
fetched. It is a relativelycomplex FSM designed specifically to
control the inner workings of the computer
according to basic cycle specifications like the fetch cycle
mentioned previously, or inreal time by decoding the cycle
information contained with the instruction.
110001110011: I dig Computer Baby Talk!
So far, this tutorial has been pretty fast with the information;
it is kind of like trying to
drink water from a fire hose, possible, but a lot will spill
out! So far, what do we know
about the inner workings of a computer?
ECE4551 Page 14 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
15/31
The computer works by executing instructions in sequence.
The program memory stores the instructions to be executed.
The control unit, in conjunction with the program counter can
fetch instructions
from program memory, decode and execute them, whatever that
means.
So far so good, before we continue, lets do a little Boolean
algebra review. Recall that
the number of permutations a particular binary number has is
equal to 2n where n is the
number of bits in the binary number. For example, if we had a 4
digit binary number ithas 24 or 16 possible combinations. An 8-bit
byte has 28 or 256 possible combinations.
This organization is used extensively in computers to allow us
to select one from many,
or address one memory location from the tens of thousands of
memory locationsavailable to us. Like the ubiquitous Apartment
Number analogy, for every memory
location, there is a unique address, just as there is a unique
physical address or number
for every apartment.
Making Bits Work:Remember the alarm example, where the finite
state machine modelled the windowsand doors of the house as bit
locations to encode the physical world into a digital
representation of that world? The dedicated finite state machine
circuits decode the
binary bit locations to determine what door or window was
opened.
This is what is being done with the so-called instructions, bit
patterns are being used
to represent places and actions we wish the computer to access
or execute. Now we cansay it; when a computer executes an
instruction, it means that particular instruction
has a physical meaning associated to its unique bit pattern.
That meaning is used to
enable the sequence of events that is required to execute the
meaning or command.
Instruction Encoding; how many bits do we need?
This is exactly how the control unit knows what to do with the
instruction it fetchedpreviously. Each instruction contains an
encoded portion indicating what to do, who to
do it to and what to do it with. This is a lot to ask a few bits
to do. As we will see later
when we compare processors, some only have enough bits to encode
64 instructions or6 bits (what to do) and 8 bits of location or
actual data information (what/who to do it
with/to). That adds up to an instruction word that is 14 bits
wide, implying the program
data memory better be at least 14 bits wide.
Time for a real example; lets say our embedded processor has an
instruction called
Add. Its function is to cause the contents of some register
(lets call it a) to beadded with the fixed value 0x14 and the
results stored back in registera, wherever
that is. The operation code (opcode25) for this instruction
could be 110001 in
binary, and the fixed (immediate) value might be 0x1426,
00010100. The entire
25 See definition:http://en.wikipedia.org/wiki/Opcode26 The
traditional prefix for a hexadecimal number is the two character
pair 0x. Each hexadecimal digit
is four bits wide, thus having 16 values, from 0 (0000) to F
(1111).
http://en.wikipedia.org/wiki/Hexadecimal
ECE4551 Page 15 of 31 03/12/2009 03:10:58
http://en.wikipedia.org/wiki/Opcodehttp://en.wikipedia.org/wiki/Opcodehttp://en.wikipedia.org/wiki/Hexadecimalhttp://en.wikipedia.org/wiki/Opcodehttp://en.wikipedia.org/wiki/Hexadecimal
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
16/31
instruction data would be the concatenation (joining together)
of the opcode and the
immediate data, for a complete instruction word of:
11000100010100. The
control unit is expert at this kind of binary computer baby talk
and decodes the first
six digits as the action to add the number represented by the
last 8 digits to someregister called a, wherever that is.
Unfortunately, for most of us humans, it is tedious
to impossible to manage lists of binary strings representing
instructions and data. Somesort of help was needed for our simple
minds to handle binary instructions.
Looking Forward: Tools for us Humans:
The time has come to peek ahead and introduce the concept of
mnemonics, the
mapping of a human understandable memory aid onto literal
computer constructs27.The trick is to come up with a pseudo
language of sorts, with descriptive verbs and
nouns representing the operations we would like to perform.
Which of the following
identical statements is easier to understand?
11000100010100 - or - add a,#0x14
The first string28 of binary digits is traditionally called
machine language (computer
baby talk) and the second statement is called assembly language,
a pseudo Englishpatois of suggestive verbs and nouns loosely
cobbled together to garner meaning.
Here is the beginning of what is called the Tool Chain, a very
important concept inunderstanding how computers work. There are
tools (actually applications that run on a
separate development computer system) that help us translate
language a human can
understand into machine language a computer can execute; the
actual, physical binarypattern stored in program memory.
In this simple example, we would create a program using a stand
alone text editor or aneditor within an IDE29 containing among
other things the add statement above anduse that human readable
text file as the input to an application called an assembler.
The assembler interprets the assembly language source code into
the appropriate bitpattern. To complete the chain, that bit pattern
is then combined with other bit patterns
to form an executable bit image. This bit image is then
programmed or burned30
into the computer program memory ROM. We will be discussing the
tool chainconcept in more detail later. At this point in our
tutorial accept it on faith that there is
indeed a way that humans can create programs that ultimately
physically are
manifested as bit patterns or instructions inside the processor,
ready to execute when
the power is turned on.
27 Derived from Wikipedia definition:
http://en.wikipedia.org/wiki/Mnemonic28 Be careful, this is not a
binary number; it is a composite representation of opcode and
data.29 Integrated Development Environment, a computer application
that streamlines the creation of
computer programs by integrating the editor, compiler, assembler
and linker into a single user interface.30 Burning a ROM is a throw
back to when physical metal fuses integral to the memory were
burned
away using a high current pulse, permanently setting the state
for that memory location. The specific
mechanisms for memory is beyond the scope of this paper; See
http://www.howstuffworks.com/rom.htm/printable for more
details.
ECE4551 Page 16 of 31 03/12/2009 03:10:58
http://en.wikipedia.org/wiki/Mnemonichttp://www.howstuffworks.com/rom.htm/printablehttp://en.wikipedia.org/wiki/Mnemonichttp://www.howstuffworks.com/rom.htm/printable
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
17/31
Figure 6 Simple Tool Chain, Assembly to Bits in Computer
Temporary storage: Data Memory.
So far we have explored how the control unit fetches an
instruction from program
memory and decodes it to perform some task. What is missing is,
where does the
control unit store temporary data? (Remember register a?) Not
everything is known
when the program is compiled into machine language, for example,
if the embeddedsystem was a thermostat, or an alarm controller,
where does the computer store the
current temperature? Where does the computer store what doors
are closed? This is the
job for Data Memory, a read/write volatile memory that the
control unit can use to save
intermediate results, or just about anything that can and does
change with time. In thestrictest sense, the program counter is an
example of this type of memory; when the
power goes away, the data is lost. Other modules rely on this
kind of memory; the
ALU uses temporary storage as scratch pad memory to hold
intermediate results. Thecontrol unit relies on temporary data
storage to keep track of the current state of the
computer. Data memory is an integral part of the computer
architecture, and it is
necessary to understand how it interacts with the other modules
we have seen so far.
Data
MemoryProgramMemory PC
ALU
I/OPort
CU
Buses
As you can see from the illustration above, most computer
architectures have at leastsome sort of program memory, data
memory, program counter and control unit. We are
almost ready to start looking at particular embedded processors.
It is first necessary to
understand the relationship between the program memory, data
memory and dedicated
volatile memory elements or registers.
ECE4551 Page 17 of 31 03/12/2009 03:10:58
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
18/31
Before continuing, lets review the concept of a register. It is
nothing more or less
than an ordered set of bit(s), not unlike a memory location,
that can hold a bit
pattern. A register may be 1 or 256 bits wide. It might hold a
single bit from theoverflow of a binary addition, or the four bit
value that points to a portion of memory
called a file. Whatever it holds, and however wide it is, it is
a volatile memory
element, usually controlled (set, reset, read) by the control
unit.
Some embedded processors for example, have a special dedicated
register for
everything. This is where the uniqueness of a processor
manifests itself; how thefunctions and data are organized
physically on the processor. Registers may be general-
purpose scratch pad to hold any value (say the intermediate
result of a logic operation)
or a special function register to hold a binary value that
corresponds to the artefacts of
the last instruction31.
As embedded processors contain more and more functionality
(timers, serial ports, A/D
converters) it is necessary to have volatile memory elements to
keep track of all their
settings and status. In some processors, there are over
two-dozen separate specialfunction registers just for this purpose.
Here is where the similarities end and
individual architectures begin to diverge from the generic
model. How does thecomputer organize the needs of program memory,
data memory and special function
registers? Keep that question close to mind as we continue our
exploration of the
computers last generic element, the ALU.
The Arithmetic Logic Unit: Workhorse of the Embedded
Processor.
Up to this point we have hinted that there is a module that is
used to do math and logic
operations managed by the control unit. Indeed, inside every
embedded processor is an
ALU that can take two or more operands, perform an operation on
them (addition,subtraction, multiplication, AND/OR/NOT) storing the
result in data memory or a
purpose built register, updating the artefacts associated with
that operation; negative,
zero, overflow, underflow, divide by zero)
Figure 7 Simple ALU
31 An artefact is a processor state that may change when an
operation is performed. For example, if the
result of a math operation is negative, a bit or flag could be
set as an artefact of that operation. There
are various flags or artefacts that are updated after each
instruction by the control unit.
ECE4551 Page 18 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
19/31
The ALU itself is a special purpose finite state machine
designed to take control signals
and operands and perform the function called out by the control
unit. Its featuresinclude the operations it can perform, the size
of the operations it can handle and the
size of the results it can produce.
Consider the addition of two 8-bit numbers. The sum could be
larger than an 8-bit
number can handle so the ALU must be able to accommodate that
possibility. The
ALU must also be able to provide some sort of floating point
functionality (or at leastmechanisms to support such operations),
usually incorporated as partially hardware,
partially custom math libraries for that processor.32 The full
complement of math
operations take up a lot of processor real estate and
compromises need to be made to
get the maximum functionality in the minimum space with the best
performance possible. It is possible to multiply or divide any two
numbers using successive
additions (or subtractions) but that would take a long time.
Time then would be the
compromise over the real estate33 needed to have a hardware
multiplier integral to the
ALU.
Memory Organization and Program Memory:
However youslice it34, every embedded controller operates on two
types of memory;
the memory that stores instructions (program memory) and the
memory thattemporarily hold values (data memory). In the previous
real chip examples, we can see
the PIC18 and AT89 both have separate, distinct memory areas,
with separate data and
address lines as opposed to the R8C architecture, where the
program and data memoryis logically one monolithic block, with one
common address and one common data bus.
It is not the intention of this paper to compare and contrast
the ramifications of this
level of architectural choices35
; we will however explore what they are and how theyare
used.
Recall that it is the control unit that calculates the address
for the next instruction tofetch. In the case of the PIC18, this is
an address that can accommodate a maximum of
8192 memory locations. As a review, how many bits are needed
(the minimum
32 It is mathematically possible to do any math operation just
using two bits and a lot of RAM, it would
just tale a lot of instructions to orchestrate even a simple 16
bit integer addition. On the other hand, you
could dedicate three separate registers, two 16 bit and one 32
bit register to hold the operands and the
sum respectfully. Controller architecture is a balance of what
space you physically have and what
operations can be done in software.33 It physically takes space
in silicon to do anything, store a bit or make a control unit. Each
processor
designer is faced with the problem of trying to find space for
everything the marketing people want inthe new version. Compromises
are made in performance or size (and power) when design
decisions
(architectures) are made.34 Off-hand homage to the so-called
bit-slicers of old.35 As is often the case, the choice of one
particular architecture over another has religious
implications,
with each ideology having its priests, each believing in their
brand of the truth. More often than not,
the choice of processor is cost, or number of pins, or what chip
did we use last? or how much do the
tools cost? and not some idealized architecture philosophy.
ECE4551 Page 19 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
20/31
number) to uniquely address every location in the program
memory?36 As it turns out,
the internal modules in the PIC18 family of processors are
almost identical, and while
the PIC18F1330 may have a program memory depth of 8192
locations, each 16 bitswide, the flagship of the PIC18 family, the
PIC18F8722 has up to 128 kBytes (64k
words) of program memory.
This common control structure is not by accident. It is to
insure instructions written for
the least capable member of the family will work on the most
capable member. In fact,
the address latch for the program memory is a full 20-bits wide,
allowing up to 220 orone million memory locations (can we expect
future versions of the PIC18 family with
more program memory?). For our PIC18 however, we have more than
enough address
bits to accommodate the 8192 locations (16 kBytes) of
instructions and constants 37.
As we mentioned earlier, the Program counter is much more than a
simple register, in
this example it is almost a mini ALU in the operations it can
perform to assemble the
correct address for the next instruction. Keeping with the
program memory theme, look
at the Atmel 89C2051 memory. Although difficult to read from the
simple blockdiagram, the literature specifies the program memory to
be byte wide, with 16 address
bits for a maximum of 65532 locations, (64 k, 1k = 1024
locations) With our variant,the 89C2015 has 2k of program memory or
2048 locations, each one byte wide.
Consider this simple fact for a moment. Each program memory
access of a
PIC18F1330 processor returns 16 bits. Each program memory access
of the 89C2015returns half as much data. If both processors are
running at the same speed, which one
moves more data per unit time? We cant answer that right now,
but keep it in mind
when we compare performance between our three embedded
processors.
To complete the program memory tour, the ARM-7 processor
addresses 32-bit wide
program memory, unlike the PIC18, which uses a 16-bit address.
Very similarprocessors, but different approaches to how the program
instructions are addressed.
36 2n = 8192, log2(8192) = n = 13 bits
37 We include and constants on purpose when describing program
memory as it is the ideal place to
store values that are known when the code is assembled, and
would overwhelm the limited data memory
space. This convenience however comes at a cost, as we will soon
see.
ECE4551 Page 20 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
21/31
Figure 8: Microchip PIC18F8722
Memory Organization and Data Memory:
Previously we explored the anatomy of controllers, describing
the blocks or modules
that made up the controller. These blocks are indeed islands of
functionality, for themost part independent of each other. That
means while the control unit is fetching
the next instruction, the ALU can be logically ORing two values,
sending the results
into a register, and the timer module (described later) can be
counting down; all at the
same time, all on the same chip of silicon.
This ability begs to be used in a parallel fashion, and not
simply in the serial follow
the recipe concept of a computer program. The tricky part is,
how does the computerkeep track of all these independent
operations? More on that later.
Going back to our real life examples, consider the monolithic
memory architecture ofthe ARM-7. To fetch an instruction, the
control unit updates the program counter, then
ECE4551 Page 21 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
22/31
places that address on the address bus. Some time later it reads
the instruction from the
ROM then executes it. If there are data values to be stored, it
places the destination
address on the same memory bus, and some time later writes it
into the RAM.
In this simple example, there is some dead time, that time
between subsequent
operations that could have been used doing things in
parallel.
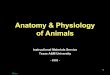
Figure 9 "Princeton" (Von Neumann's) Architecture
Figure 10 "Harvard" Architecture
Look at the Figure 4, on the PIC18 architecture; the program
memory has its own
address and data busses, distinct and separate from the data
memory. This means thecontrol unit can be building the next
instruction to be fetched while it is decoding thecurrent
instruction, and at the same time writing the results of the last
ALU operation
into the data memory. The level of parallelism is common to
architectures that have
separate program and data memory spaces. The figures above
illustrate the basicmemory architecture differences, the main idea
to keep in mind is in the Princeton
architecture, there is one Program/Data memory address and data
bus, tying the
program and data memory logically together. In the Harvard
architecture (hmmm, I
ECE4551 Page 22 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
23/31
wonder where they were invented) the program and data memory are
separate and
distinct, each with its own address and data busses.
Is one architecture better than another? It is a difficult
question to answer without
knowing the actual application. In a simple case when the
computer is reading a
thermostat, checking it against a pre-set temperature and
deciding if the heat should beturned on, it doesnt take many cycles
to accomplish, and a monolithic memory may be
just fine. If more performance were required, a faster processor
could be used. If
however, many functions were being handled at the same time,
like reading the buttonson a USB Nintendo controller, processing 8
buttons as well as the angles of the
left/right joysticks and sending the information back to the
Play station in time to keep
from being sliced in half by the Org you are battling, it may be
better to have a
microcontroller that can do as much as possible at the same
time.
The organization or architecture of the computer includes how
the various volatile
memory elements: registers: are organized and controlled. Some
architectures use
individual, separate registers for everything: see Figure 11. An
alternative to havingseparate physical registers is the model used
by the RC8 and PIC18, the registers for
the whole computer are contained in data memory as a set of
registers, addressed likeany other memory element and often
organized as files or blocks of memory.
This significantly reduces the complexity of the control unit
while maintaining the
flexibility of added functionality. For example, consider two
processors from the samefamily; the PIC18F8722 and the PIC18F1330.
Using the same register file,
architecture, it is possible to accommodate the five timers and
12 A/D modules using
the same control unit that the PIC18F1330 uses to maintain 2
timers and 5 A/Dmodules.
ECE4551 Page 23 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
24/31
Figure 11 PPC 405 Core Programmers model copyright 2006, IBM
The other fiddly bits: Input Output and additionalprocessor
functionality.
To round out the inner workings of the data memory, it is
important to consider how
our computer actually moves data into and out of the processor
chip. In most
architecture, an I/O pin is a simple RAM element, usually
organized as a register ofindividually accessible bits that is on
the data memory bus. To perform an output
operation, the control unit asserts the direction control so the
pin will be electrically an
output pin. Figure 12 illustrates one bit of the I/O port for
the PIC18. The simple portpicture illustrated in Figure 4 glosses
over the real work the control unit does in
orchestrating an I/O operation. This is further complicated when
the I/O pin can be an
analogue input pin as well as a digital I/O pin.
ECE4551 Page 24 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
25/31
Figure 12 Generic PIC18 I/O pin Figure 13 Digital & Analogue
I/O pin
In addition to input and output functionality, most
microcontrollers these days havesome sort of built in timer
capability. These timer modules operate independently once
set and started, and provide a much-needed function to count
events or time to be used
in an embedded application. Again, there is a trade off between
chip real-estate andsoftware overhead. Any timer function can be
implemented in software using loops and
tests, at the cost of having to execute in linear time with the
program. No matter howfast a program is it can only be doing one
thing at a time. Implementing a timer in
hardware however, relieves the burden of maintaining a
count.
ECE4551 Page 25 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
26/31
Real world timers do more than just count; here the ARM-7 has
two, 32-bit timers38,
with selectable input count frequencies (multiples of the master
clock) as well as input
from I/O pins (to count events happening on a pin). It is a
simple matter to preload a16-bit timer39 and count from 0x0000 to
0xffff. If the master 32 MHz clock was used as
the count input then the timer would roll over or overflow 40
every 2 or so milliseconds.
If the fc32 divider is used, then it would overflow every 64
milliseconds.
Timers, I/O ports, A/D modules, indeed most if not all computer
special function
modules need registers to hold configuration parameters (in the
case of the timer it maybe the flag bit that controls if the timer
restarts after an overflow). As we saw in the
PIC18, these registers are part of the computer data memory
area. In the case of the
PPC405, they are individual registers, peppered all over the
die. Figure 15 illustrates
what is arguably the quintessence of microcontroller technology
to date, the PhilipsLPC2114.
Using what we have learned, lets examine this animal closely.
The key to evaluating
a microcontroller is in answering fundamental structure
(anatomy) questions first, andthen if the structure is appropriate
to the task, then take a closer look at the
functionality (physiology) of the beast.
First the bones; how is the Program counter, Control Unit and
ALU arranged? How
does the chip get/put data to the outside world? What other
goodies are available
(timers, USARTS, A/D)?
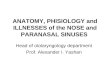
At first blush, the block diagram of the LPC2114 seems to be
missing many essential
elements. They are there; it just takes a little digging. This
chip represents a new trendin embedded processors, that is a common
core of functionality, surrounded by the I/O
that makes that particular processor special. Here the core is
illustrated in the block
named ARM7-DTMI. The actual guts of the core is illustrated in
Figure 14. TheProgram Counter is implemented by two elements, the
Address Incrementer and the
Address Register, which makes sense considering how the program
counter normally
functions. The other basic processor elements are present, The
ALU, the Control Unit,and a data register. Some interesting
additions are a 32 x 8 hardware multiplier, and a
barrel shifter interfaced with the ALU. These could help
floating point operations by
speeding up in hardware common math tasks. (Remember the
real-estate
performance trade-off discussion? Clearly, this chip is built
with the building blocks ofspeed.) Another interesting element is
the 31 x 32 bit register bank, a good place to
hold intermediate results, or condition flags; at this point in
the investigation it is not
clear, but should not come as a surprise when looking at the
physiology of this beastto discover there are such register
locations in the bank.
38 Philips LPC2124 Datasheet.39 Timers are characterized by how
many bits are used to count with.40 A timer typically starts at
some preloaded value and count up, one bit at a time until the
maximum
value is reached. Then, depending on the mode used, a overflow
flag is set, the initial value reloaded
and the cycle started all over again.
ECE4551 Page 26 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
27/31
This cursory look at the ARM-7 core should convince you that it
has the infrastructure
to be a hot, 32 bit processor. Now, lets have a look at the
I/O.
Figure 14 ARM-7 Core
Looking at Figure 15, we can now see where the program and data
memory live, it is a
monolithic block, with a single address and data bus. The I/O
however, has their own
address/data bus, an interesting combination, and should make
the I/O modulessomewhat independent of the ARM-7core.
In this initial look, it is clear this chip has been designed to
accommodate almost any
I/O scenario you would encounter with an embedded processor.
ECE4551 Page 27 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
28/31
Figure 15 ARM-7 (Philips LPC2114) Block Diagram
Summary.In this paper we have explored how any embedded
processor is made up of the sameelements, and each individual
element has basically the same behaviour. These
elements are mixed and matched to create the animal known as an
embedded
processor, and along with the software applications in the tool
chain, make up a
development environment the designer can use to solve real world
problems usingembedded processors.
The heart of the embedded processor is the concept of an
infinite state machine, thatI, dedicated hardware that can
reconfigure functionality by following a set of
instructions. This innovation has enabled designers to move away
from the directhardware manipulating bits to looking at problems
from a modular perspective.
As important as the hardware advances is the tool chain used to
design the control
software, the ultimate arbiter of any embedded system.
ECE4551 Page 28 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
29/31
Embedded Processor questions to test forunderstanding:
1. What is the difference between a Finite State Machine and an
embedded
processor doing the same task?
2. How do you physically get the program into the embedded
processor?3. What is the first thing the embedded processor does
when the power is turned
on?
4. What is the difference between an 8-bit processor and a
32-bit processor?5. What are the steps needed to translate the
following text into machine code?
int a = 5;
int b = 3;
if(a > b)
a = a+b;
else
a = b;
ECE4551 Page 29 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
30/31
Answers
1. The FSM has one task it is designed to perform; the embedded
processor can be
programmed to do an infinite number of tasks.
2. The embedded processor is connected to a chip programmer,
either in the
circuit (so called in circuit programming) or as individual
chips. The machinecode file is used by the programmer to change the
instruction memory on the
chip.3. At the beginning of time, all embedded processors are
held in a reset state,
allowing all the internal circuitry a chance to start in a known
state.
4. Generally, the difference is in the internal representation
of data. In an 8-bit
machine, data is moved one byte at a time. In a 32-bot machine,
data is moved(in the same time frame) 4 bytes at a time.
5. The text is input to a compiler that translates the Human
readable code (in this
case C) The result of the compiler is assembly code, the
processor specifichuman readable version. Finally, that assembly
code is fed into an assembler
linker tool that produces machine readable code, specific to
that individualprocessor.
ECE4551 Page 30 of 31 03/12/2009 03:10:59
-
8/14/2019 Embedded Systems - Comparative Anatomy and
Phisiology
31/31
i Fundamentals of FPGAs:
http://www.techonline.com/learning/course/210605004