Embed Size (px)
Citation preview

Embedded System Design and Joint Motion Control of a Quadruped Robot
by
Chonghan Ma
B. Eng., Hubei University of Technology, 2017
A Thesis Submitted in Partial Fulfillment of the
Requirements for the Degree of
MASTER OF APPLIED SCIENCE
in the Department of Mechanical Engineering
c© Chonghan Ma, 2020
University of Victoria
All rights reserved. This thesis may not be reproduced in whole or in part, by
photocopying or other means, without the permission of the author.

ii
Embedded System Design and Joint Motion Control of a Quadruped Robot
by
Chonghan Ma
B. Eng., Hubei University of Technology, 2017
Supervisory Committee
Dr. Yang Shi, Supervisor
(Department of Mechanical Engineering)
Dr. Keivan Ahmadi, Departmental Member
(Department of Mechanical Engineering)

iii
Supervisory Committee
Dr. Yang Shi, Supervisor
(Department of Mechanical Engineering)
Dr. Keivan Ahmadi, Departmental Member
(Department of Mechanical Engineering)
Abstract
In recent decades, mobile robotics have become one of the fastest growing research
fields. Compared with wheeled and tracked robots, legged robots can step over ob-
stacles and traverse unstructured terrains. This thesis focuses on two main tasks for
supporting the development of a quadruped robot, i.e., the robot embedded system
design and the joint motion control.
To develop the robot embedded system fulfilling the technical requirements, a
controller board using an ARM-based STM32 microcontroller is designed. First, we
select the key components properly, according to the practical requirements and the
marketing research. Then the onboard hardware architecture is proposed, and the
circuit schematic diagrams for all the functional modules are designed. The specifi-
cations and a comparison of two versions of PCBs are also presented and analyzed.
Based on the designed embedded system, the actuators and sensors are tested,
and selected to set up the robot experimental platform. Moreover, the firmware
is configured, and the software is developed to control the position and velocity of

iv
the motors. Furthermore, the moving average filter (MAF) based cascaded PID
control algorithm is designed, and is implemented to manipulate the robot joints. The
experimental results demonstrate the effectiveness of the proposed control method.

v
Table of Contents
Supervisory Committee ii
Abstract iii
Table of Contents v
List of Tables viii
List of Figures ix
Acronyms xi
Acknowledgements xii
Dedication xiii
1 Introduction 1
1.1 An Overview on Mobile Robots . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Wheeled and Tracked Robots . . . . . . . . . . . . . . . . . . 2
1.1.2 Legged Robots . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Robot Control System . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.1 Actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.3 Embedded System . . . . . . . . . . . . . . . . . . . . . . . . 11
vi
1.3 Objectives and Contributions . . . . . . . . . . . . . . . . . . . . . . 12
1.3.1 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.2 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 Thesis Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Robot Specifications and Mechanical Structure 16
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Robot Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Robot Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1 Kinematic Structure . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.2 Torso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3.3 Legs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Main Stages of the Robot Development . . . . . . . . . . . . . . . . . 22
2.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Embedded System Hardware Design 24
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Component Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.1 Microcontroller . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.2 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 Circuit Schematic Design . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1 Hardware Architecture . . . . . . . . . . . . . . . . . . . . . . 34
3.3.2 Pin Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3.3 Motor Drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3.4 Voltage Regulation . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3.5 Sensor Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4 PCB Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42

vii
3.4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4.2 Power Distribution . . . . . . . . . . . . . . . . . . . . . . . . 45
3.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4 Joint Motion System Design and Tests 48
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2 Hardware Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2.1 Potentiometer Selection . . . . . . . . . . . . . . . . . . . . . 49
4.2.2 Motor Selection . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3 Software Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.3.1 Firmware Configuration . . . . . . . . . . . . . . . . . . . . . 53
4.3.2 Software Development . . . . . . . . . . . . . . . . . . . . . . 55
4.3.3 MAF Algorithm Design . . . . . . . . . . . . . . . . . . . . . 56
4.3.4 Cascaded PID Controller Design . . . . . . . . . . . . . . . . . 57
4.4 Joint Motion Experiments . . . . . . . . . . . . . . . . . . . . . . . . 59
4.4.1 Knee Joint Test . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.4.2 Hip Joint Test . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.5 Structural Problems and Solutions in Mechanical Design . . . . . . . 61
4.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 Conclusions and Future Work 63
5.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Bibliography 66

viii
List of Tables
Table 1.1 Comparison of three conventional actuator types [36]. . . . . . . 9
Table 1.2 Key specifications of four electric-powered quadruped robots. . . 15
Table 2.1 Key specifications of the designed quadruped robot. . . . . . . . 17
Table 2.2 The weight of the robot components. . . . . . . . . . . . . . . . 18
Table 2.3 Torso components of the quadruped robot. . . . . . . . . . . . . 19
Table 3.1 Specification requirements of the microcontroller. . . . . . . . . 29
Table 3.2 Comparison of specifications of 5 MCUs. . . . . . . . . . . . . . 30
Table 3.3 Comparison of the characteristics of LDO and switching regulators. 32
Table 3.4 Comparison of two version of printed circuit board. . . . . . . . 47
Table 4.1 Taper measurement of the tested potentiometerts. . . . . . . . . 51
Table 4.2 Test and selection results of 18 motors. . . . . . . . . . . . . . . 53
Table 4.3 Parameter settings of the joint motion control system. . . . . . . 58
ix
List of Figures
Figure 1.1 (a) “Toyota monopod” [22] and (b) “Salto-1P” [23, 24]. . . . . 4
Figure 1.2 (a) “REEM-C” [25] and (b) “TALOS” [26]. . . . . . . . . . . . 5
Figure 1.3 (a) “HyQReal” [27] and (b) “Cheetah 3” [28]. . . . . . . . . . . 6
Figure 1.4 (a) “Laikago” [29] and (b) “ANYmal” [30]. . . . . . . . . . . . 7
Figure 1.5 Flow diagram for embedded system [41]. . . . . . . . . . . . . . 11
Figure 2.1 Robot 3D-CAD model with components description. . . . . . . 17
Figure 2.2 Kinematic structure of the robot with hip and knee joints. . . . 18
Figure 2.3 CAD model of the hip joint. . . . . . . . . . . . . . . . . . . . . 20
Figure 2.4 CAD model of the knee joint. . . . . . . . . . . . . . . . . . . . 21
Figure 2.5 Forward and backward movement of the robot. . . . . . . . . . 21
Figure 2.6 Lateral movement of the robot. . . . . . . . . . . . . . . . . . . 22
Figure 3.1 First version of the PCB (left) and second version of the PCB
(right). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 3.2 Block diagram of MCU with required I/Os. . . . . . . . . . . . 27
Figure 3.3 Main processor bit size in 2017 embedded markets study [46]. . 28
Figure 3.4 Power distribution of the quadruped robot. . . . . . . . . . . . 33
Figure 3.5 The hardware block diagram of the embedded system. . . . . . 35
Figure 3.6 Circuit schematic diagram of the MCU. . . . . . . . . . . . . . 37
Figure 3.7 First version of the motor drive design. . . . . . . . . . . . . . . 38
Figure 3.8 Second version of the motor drive design. . . . . . . . . . . . . 39

x
Figure 3.9 First version of the voltage regulation design. . . . . . . . . . . 40
Figure 3.10Second version of the voltage regulation design. . . . . . . . . . 40
Figure 3.11Two versions of the potentiometer interface design. . . . . . . . 41
Figure 3.12Two versions of the IMU interface design. . . . . . . . . . . . . 41
Figure 3.13Layer structure of the designed double-sided PCB. . . . . . . . 42
Figure 3.14Process flow of the PCB design. . . . . . . . . . . . . . . . . . . 44
Figure 3.15First version of the power distribution design. . . . . . . . . . . 45
Figure 3.16Second version of the power distribution design. . . . . . . . . . 46
Figure 4.1 Experimental platform of the quadruped robot. . . . . . . . . . 49
Figure 4.2 Potentiometer schematic representation. . . . . . . . . . . . . . 49
Figure 4.3 Pin configuration of the microcontroller. . . . . . . . . . . . . . 54
Figure 4.4 Clock configuration of the microcontroller. . . . . . . . . . . . . 54
Figure 4.5 Experimental software flowchart. . . . . . . . . . . . . . . . . . 55
Figure 4.6 Control block diagram of the closed-loop joint motion system. . 58
Figure 4.7 Knee joint rotates from position (a) to (b) in handstand status. 59
Figure 4.8 Comparison of filtered and unfiltered joint control. . . . . . . . 59
Figure 4.9 Knee joint rotates from position (a) to (b) in “standing” status. 60
Figure 4.10Keyed joint connection between bevel gear and shaft sleeve. . . 62
Figure 5.1 Leg structure with three active joints and one passive joint [61]. 64

xi
Acronyms
DOF degree of freedomCOG center of gravityCPU central processing unitPC personal computerCAN controller area networkPAs proprioceptive actuatorsSEAs series elastic actuatorsBLDC brushless direct currentIMU inertial measurement unitPID proportional-integral-derivativeOS operation systemCAD computer-aided designUART universal asynchronous receiver/transmitterUSART universal synchronous/asynchronous receiver/transmitterRTOS real time operation systemRAM random access memoryROM read only memoryFPU floating point unitSWD serial wire debugI/O input/outputMCU microprogrammed control unitSPI serial peripheral interfaceDC/DC direct current to direct currentAC/DC alternating current to direct currentLDO low-dropoutIC integrated circuitPWM pulse-width modulationPCB printed circuit boardMOSFET metal–oxide–semiconductor field-effect transistorA/D analog to digitalMAF moving average filterIDE integrated development environmentFPGA field-programmable gate array

xii
Acknowledgements
Firstly, I would like to express my sincere gratitude to my supervisor, Dr. Yang
Shi for providing me with the precious opportunity to work in such an amazing field
during my MASc study at UVic. His immense knowledge and insightful suggestions
always inspire me to move forward. He not only encouraged me with great patience
to promote my academic abilities, but also provided tons of experience on becoming
a responsible and mature person. I have gained an invaluable amount of knowledge
and experience working under his supervision.
I wish to thank the thesis committee members, Dr. xxx and Dr. xxx, for their
constructive suggestions.
Moreover, I am also thankful to all my labmates from Applied Control and Infor-
mation Processing Lab (ACIPL), it is my honor to work with you all. In particular,
I am grateful to Dr. Bingxian Mu for picking me up when I arrived in Victoria, to
Xiang Sheng for providing kindness help on the project. I would also like to thank
Dr. Chao Shen, Dr. Yuanye Chen, Jicheng Chen, Kunwu Zhang, Yuan Yang, Qi Sun,
Qiao Zhang, Changxin Liu, Henglai Wei, Tianyu Tan, Xinxin Shang, Zhang Zhang,
Chen Ma, Huaiyuan Sheng, Zhuo Li, and Tianxiang Lu for the impressive time we
spent together. Thanks also go to my reliable friends Dr. Chunxi Yang, Dr. Liying
Hao, Dr. Fengqiu Xu, Kenan Yong, Hongwei Sun, Xin Jin, Shichang Cui, Chengsi
Shang, Chenglong Du, Meng Li, Dong Wang and Lu Ren for their selfless help.
Finally, I would like to thank my parents for their never-ending love, support and
encouragement during this whole journey.

xiii
To my parents
To my grandfather

Chapter 1
Introduction
1.1 An Overview on Mobile Robots
Autonomous robots can be roughly classified into two categories, stationary robots
and mobile robots. One type of stationary robotic systems is the manipulator, which
places surface-mounted components with extremely high precision [1], i.e., in the
assembly line, a robot arm is able to move with high speed and accuracy to perform
repetitive tasks, such as spot welding [2] and painting [3]. Another important type of
stationary robotic systems is the grasping device [4], which is commonly used to grasp
the desired objects. Nowadays, a variety of robotic hand and finger mechanics have
been developed and have been widely applied in agriculture [5], etc. Unfortunately,
these stationary robots are suffering from the lack of mobility and limited range of
motion.
In contrast, mobile robots are able to move over rough terrains. Due to flexibility
of the mobile robots, they are widely applied in many areas such as planetary ex-
ploration, medical care, and construction, etc. In these application scenarios, mobile
robots can be classified into land-based robots, aerial robots, and underwater robots.
2
Furthermore, according to different mechanical structures, the land-based robots can
be divided into wheeled robots, tracked robots, and legged robots, respectively.
1.1.1 Wheeled and Tracked Robots
As one of the most important systems for robot locomotion, wheeled robots play
significant roles in transportation [6] and logistics [7]. Generally, wheeled robots
move faster and consume less energy than tracked vehicles. Meanwhile, they also
tend to be much cheaper and do not present difficulties in terms of balance issues,
in comparison with their legged counterparts. Therefore, the control strategies for
wheeled robots are less complex than other solutions. Compared to conventional
wheeled robots, tracked robots feature larger ground contact patches and less ground
impact [8]. However, they are less precise in maneuverability and more difficult to
get repaired.
1.1.2 Legged Robots
In nature, there are some specific places, such as planetary surfaces [9, 10, 11], con-
struction [12, 13], and disaster salvation [14, 15], etc. These circumstances are mostly
uneven terrains, which limit the application of wheeled robots and tracked robots.
However, legged robots are more suitable in these situations for locomotion imple-
mentation, by virtue of their terrain adaptation ability. In addition, they can also be
applied in plenty of fields, such as medical applications [16, 17] and education [18].
Therefore, the legged robot has become a hot spot in robotics research, due to their
advantages over wheeled and tracked robots.
Firstly, legged robots present superior mobility in natural terrains. Unlike wheeled
robots, they can avoid small obstacles by making discrete footholds without the neces-
sity of continuous support surface. Moreover, the use of multiple degrees of freedom
3
(DOFs) in the leg joints adjusts the leg extension to position the center of gravity
(COG) of the body, and further varies the body height. Hence, legged robots are able
to move over irregular terrains by adjusting their leg configurations.
The other advantage is that legged robots have redundant legs, and therefore they
can maintain balance and continue walking even with one leg mutilated during static
locomotion, which improves failure tolerance [19, 20]. Additionally, the legs can work
as an active support base to flexibly actuate the robot body when feet are fixed to
the ground [21].
Although legged locomotion is advantageous compared with traditional wheeled
and tracked vehicles, legged robots also have drawbacks. They require complex me-
chanical design and control algorithm. Furthermore, they are heavier and consume
larger energy since a large number of actuators are required to manipulate multiple
DOFs legs. There are many types of walking robots depending on the number of legs.
• Monopod
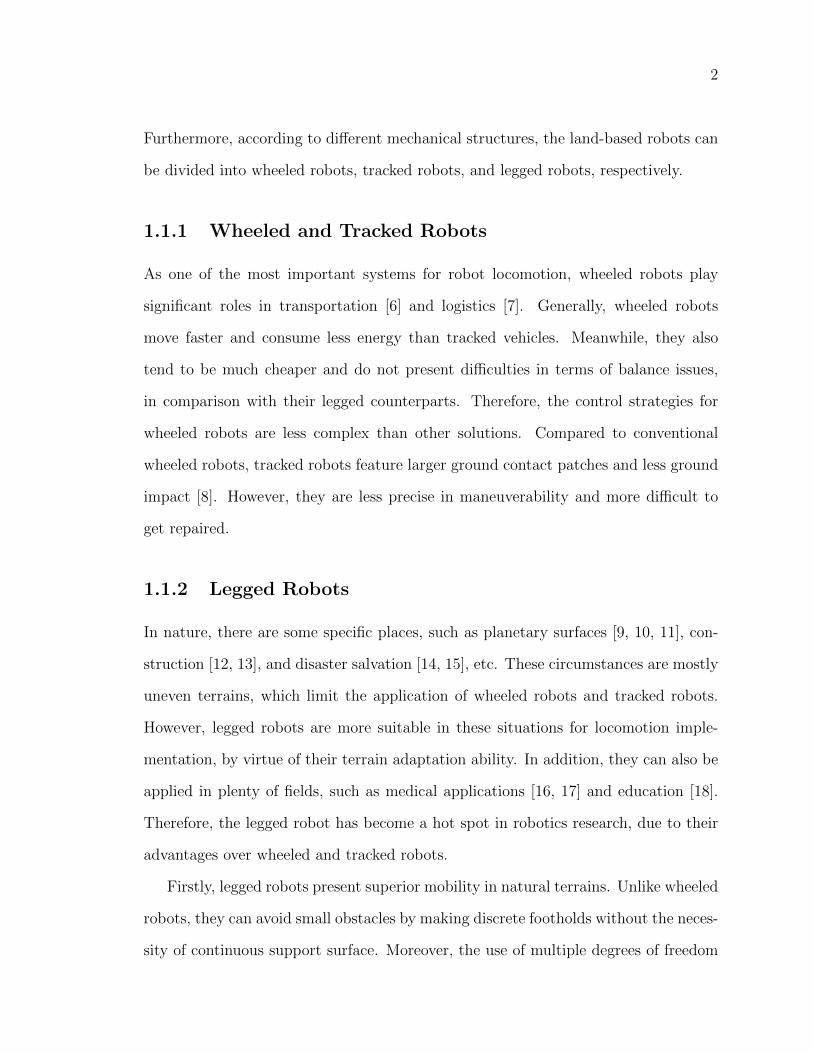
The Monopod robots have only one type of locomotion gait, i.e., hopping, which
represents a highly nonlinear dynamical behavior, consisting of alternating flight and
stance phases. As shown in Figure 1.1(a), a Toyota monopod robot [22] developed
by Tajima and Suga in 2006 has a total of seven DOFs, three at the hip, one at the
knee, two at the ankle, and one at the toe, with one extra DOF for 3D motion. This
redundancy is beneficial for reducing the excessive joint speed when it is hopping.
Another distinctive jumping robot, named as Salto-1p [23, 24], was created by UC
Berkeley’s Biomimetic Millisystems Lab in 2017. It is designed to mimic saltatorial
animals like galago or bushbaby, which has a strong vertical jumping agility, as shown
in Figure 1.1(b).
4
(a) (b)
Figure 1.1: (a) “Toyota monopod” [22] and (b) “Salto-1P” [23, 24].
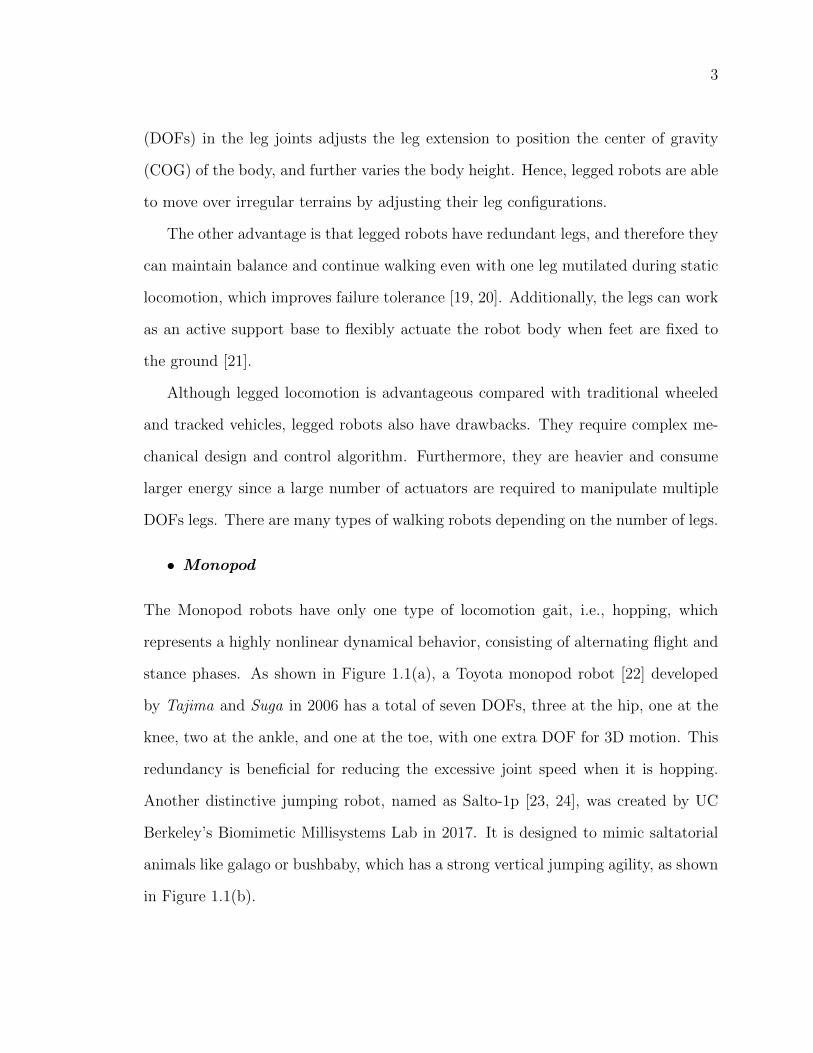
• Bipedal robot
Bipedal robots make use of sensors to reproduce human capabilities, such as going up
and down stairs, jumping, or even doing somersaults. As illustrated in Figure 1.2(a),
the biped “REEM-C” is a 100% ROS-based bipedal robotics platform, which was
launched by PAL Robotics in 2013 [25]. It is controlled by two computers with Intel
Core i7-2710QE CPUs. The sonars and cameras help to map its environment, perform
path planning, and achieve obstacle avoidance. The MTi-30 AHRS sensor provides
the real-time attitude information and improves walking stability. In addition, all
the motors and sensors communicate with the PC via CAN network. In 2017, a new
humanoid robot “TALOS” [26], also launched by PAL Robotics, is mainly used for
artificial intelligence and human-robot interaction, as shown in Figure 1.2(b). It is a
fully electrical actuated and torque-controllable robot, assembled with torque sensors
and EtherCAT communication network to manipulate up to 6 kg payload for each
stretched arm.

5
(a) (b)
Figure 1.2: (a) “REEM-C” [25] and (b) “TALOS” [26].
• Quadruped robot
Quadruped robots have the advantage of being statically stable when they are not
moving. However, dynamic walking control for leg coordination becomes more com-
plicated and high computational speed is required. Moreover, according to different
types of actuators, the application scenarios and control performance are different.
As shown in Figure 1.3(a), the “HyQReal” is developed to support humans in emer-
gency scenarios, presented by IIT (Istituto Italiano di Tecnologia) in 2019 [27]. It is an
electro-hydraulic powered quadruped robot that features high ruggedness, reliability
and energy efficiency. Combined with large output driving force, fast response speed
of the hydraulic actuator and compact structure of the electric motors, it can pull a
small passenger airplane weighing more than 3 tons. Additionally, it is controlled by
two computers on board: One is dedicated to vision and the other is for control.
As pictured in Figure 1.3(b), the “Cheetah 3” is designed to move across rough
terrain and through obstacles without relying on vision, built by MIT in 2018 [28].
It is driven by self-made proprioceptive actuators (PAs), which have high torque
density to improve the load-carrying ability and low-speed efficiency. The actuation

6
system is designed to achieve certain tasks, such as power plant inspection and blind
locomotion, which makes the robot suited for reconnaissance and rescue missions.
The locomotion control and state estimation are handled by an embedded computer
with a second GEN Core i7 CPU, while the leg controller is performed by an ARM-A8
processor.
(a) (b)
Figure 1.3: (a) “HyQReal” [27] and (b) “Cheetah 3” [28].
Laikago [29], released by Unitree Robotics in 2017, is a lightweight quadruped
robot research platform and actuated by 12 Unitree brushless DC motors, as shown
in Figure 1.4(a). It is capable to maintain stability as the terrain changes and adjust
the posture automatically. Therefore, Laikago is applied to perform tasks such as
security patrolling, deliveries or research studies.
ANYmal is designed for autonomous operation in challenging environments, cre-
ated by ETH Zurich and ANYbotics in 2016 [30]. Driven by special compliant and
highly integrated series elastic actuators (SEAs), the robot is capable of wide range
of motion and high-mobile climbing. The robot navigation is achieved by using on-
board thermal cameras, microphones and Lidar scanners. Furthermore, it can open
doors autonomously, walk upstairs in any terrain, and crawl through tight spaces by
changing the leg configurations.

7
(a) (b)
Figure 1.4: (a) “Laikago” [29] and (b) “ANYmal” [30].
The performance of mobile robots can be further improved by using different loco-
motion modes, and thus hybrid locomotion robots have been studied and developed in
recent years [31, 32, 33]. This type of robot structure takes the advantages of various
locomotion modes and switches between different modes according to the practical
requirements and terrain conditions.
1.2 Robot Control System
Essentially, an industrial robot control system consists of three elements: Actuator,
sensor and the embedded system. The actuators are used to produce mechanical
movements in robots or tell what the robot is doing. Moreover, the sensors measure
the physical properties of the surrounding environment to increase the performance
of robot to a large extent. More importantly, the embedded system globally inter-
connects every subsystem and performs different tasks simultaneously. Thus, the
embedded system is the centerpiece of a robot control system.

8
1.2.1 Actuators
There are three types of actuators (electric, hydraulic and pneumatic) which are most
commonly used to actuate the robot joints.
Electric robots are usually driven by permanent magnet servo motors, brushless
motors and stepper motors. Compared with fluid power machines, electric actuation
systems are easily maintained and are suitable for electronic control. However, unless
incorporating direct-drive motors, electrically driven robots have the limitation of
requiring transmission systems. It can not only add cost and weight, but also reduce
precision and efficiency due to gear backlash or undesired friction. Furthermore, if
their maximum permitted torque is exceeded, the gears are increasingly becoming the
weakest element of an electric motor unit [34] with the risk of breaking. Additionally,
electric motors produce low torque relative to their size and weight.
Hydraulically powered robots have very good power-to-weight ratio and hydraulic
force can be applied directly at the desired point without the necessity of a trans-
mission system. In addition, there are no backlash problems, as hydraulic fluid is
incompressible. Because of the sturdy construction, they can withstand higher shock
loads than other robot types. However, they tend to be less reliable than electric
robots due to fluid leaks which contaminates the work areas and causes performance
loss. Moreover, hydraulic robots tend to be much more expensive than their electric
counterparts.
Pneumatic powered robots are the cheapest and least sophisticated type. They are
fast, reliable and easily understood by technicians. Meanwhile, they can also be used
to detect gas leakage [35]. The major weakness of the pneumatic robots is that precise
servo control is not practical due to compressibility of the air, particularly when
moving heavier loads. Thus, pneumatic robots are usually found in light-load and
fixed-speed applications. The most important properties of the electric, pneumatic

9
and hydraulic actuators are listed in Table 1.1.
Table 1.1: Comparison of three conventional actuator types [36].
Property Electric Hydraulic Pneumatic
Working principle electricityhigh quality oil,
synthetic liquids
air, nitrogen,
combustion
Power supply ≤460V 0.4-70MPa 0.04-0.9MPa
Efficiency high low low
Speed fast relatively fast slow
Position accuracy high good good
Energy consumption low high high
Power-to-weight ratio low high relatively high
Noise low relatively high relatively high
Temperature sensitivity insensitive sensitive relatively sensitive
Cost relatively low high low
1.2.2 Sensors
It is vital for an autonomous mobile robot to acquire knowledge about its work
environment. This can be achieved by collecting data via sensors. For instance, the
use of sensors makes it possible to perform robot positioning and localization tasks
[37]. In addition, they are widely used for mapping [38] and object recognition [39].
Generally, the sensors can be grouped into internal and external sensors. Internal
sensors are utilized to measure the parameters of the robot itself, such as the motor
speed, joint angle, etc. External sensors obtain surrounding information, such as the
distance, light intensity, and sound amplitude. The most common sensors used in the
robot control systems are as follows:

10
• Potentiometers are a type of resistive transducers and the output voltage
is proportional to the displacement. They are primarily used to measure the
angular position in the robot control systems, with feedback loops to ensure
that the joints reach the desired positions.
• Force and torque sensors are always mounted in each leg of the robot. They
can detect the ground contact angle and measure the amount of force between
the foot and ground, and further adjust the robot posture.
• Encoders measure the position and speed of the motors, i.e., a rotary shaft
encoder uses a disk which is read by an optical photodetector inside the encoder
to output the digital signal that indicates the angular position of the shaft.
• IMUs usually contain accelerometers and gyroscopes. Accelerometers measure
the acceleration, from which velocity can be obtained by integration. In most
cases, IMU is used to measure angular velocities and orientation.
• Laser range finder uses a laser beam to generate highly precise distance
measurements. The distance between sensor and target is measured by calcu-
lating the speed of light and the time it takes for emitted light to return to the
receiver.
• Vision-based sensors process data from any modality and use the electro-
magnetic spectrum to produce images. The two current technologies for devising
vision sensors are CCD and CMOS [40].
• Depth sensors are used in object detection, scene reconstruction, 3D inspec-
tion, and so on. Two elements must always be present in a depth sensor: An
infrared (IR) projector and an IR camera.

11
1.2.3 Embedded System
Embedded system is a scaled down computer, which is designed to perform specific
tasks. Compared with a computer platform, embedded system is much easier to
design, less expensive and more portable, therefore, it is widely used in the mobile
robot applications. The embedded system interfaces with the robot internal and
external sensors, actuators, and other peripheral components. Thus, it is capable to
handle serial and parallel data transmission at various rates, and carry out A/D and
D/A conversion. The flow diagram of an overall embedded system is illustrated in
Figure 1.5.
Figure 1.5: Flow diagram for embedded system [41].
It can also perform the functions necessarily for the servo control. For example,
in an electric-actuated robot system, the low-voltage control signals are sent out to
the motor drive amplifiers to produce power for the motors. Meanwhile, the internal
sensors measure the actual position of the motors and sent back to the microcontroller.
Additionally, the software development of an embedded system is closely related
to the hardware, which could be tailored to make the system suitable for various
robot applications. Typically, four electric-actuated quadruped robots with key spec-
ifications are presented in Table 1.2.
12
1.3 Objectives and Contributions
1.3.1 Objectives
To develop a dynamic and versatile quadruped robot, powered by electric actuators,
the objectives of the project are summarized as follows:
• Design of a robot experimental platform : Firstly, we intend to develop
the robot embedded system, including the onboard hardware and software co-
design. By integrating the designed embedded system, actuators and sensors,
the robot experimental platform is then constructed.
• Control of joint motion and leg locomotion : Based on the first objective,
we aim to design and apply the control algorithm to test the joint motion and
to further manipulate each leg to complete certain locomotion and gestures.
The goal of present thesis is to make a contribution toward the achievement of
the above objectives. This thesis describes the design and development of an embed-
ded system for joint motion control in details. Moreover, it provides a foundation
for further improvement and implementation of the robot platform and locomotion
control. In addition, it also provides a reference for people conducting research within
the project and its collaborators.
1.3.2 Contributions
The main contributions of the thesis project are listed below:
• The hardware of the robot embedded system is designed to provide the under-
lying platform for motor control.
13
• The software of the robot embedded system is developed in Keil uVision IDE
and programmed into a STM32 microcontroller.
• Based on the designed embedded system, actuators and sensors are then tested
and selected to set up the robot experimental platform.
• The moving average filter based cascaded PID control strategy is designed and
implemented on the closed-loop joint motion system.
• Existing mechanical design problems are analyzed and possible solutions re-
garding motor torque transmission are proposed to further improve the joint
structures.
1.4 Thesis Organization
The remainder of this thesis is organized as follows:
• Chapter 2 introduces the robot system specifications, joint structures, and
the principles of leg motions. In addition, the research development process is
reported based on the predefined objectives.
• Chapter 3 presents the hardware design of the embedded system in details,
with descriptions of robot component selections. Next, the circuit schematic
diagrams and PCBs in two versions are discussed and analyzed with compar-
isons.
• Chapter 4 studies the robot joint motion system, based on the testing of
sensors and actuators, firmware configuration and software development. By
implementing the MAF-based cascaded PID control strategy, experimental re-
sults are shown with respect to the motion performance of both knee and hip
joints.

14
• Chapter 5 summarizes this thesis with the conclusions and future research
directions.

15
Table 1.2: Key specifications of four electric-powered quadruped robots.
Index
TypeLaikago Mini Cheetah Jueying SpotMini
Dimensions
(L×W×H;cm)55×35×60 48×27×30 85×50×65 84 (H)
Weight (kg) 22 9 40 30
DOF 12 18 12 17
Speed (km/h) 2.88 8.8 ≥7 5.76
Actuatorscustomed
BLDC motorselectric motors
customed
PMSM motorsall-electric
SensorsIMU, joint encoders
foot force sensors
IMU
hall-effect encoders
IMU, lidar,camera
foot force sensors
IMU, camera
position/force sensors
Powerlithium-ion
battery
lithium-ion
battery
lithium-ion
battery
lithium-ion
battery
Runtime (h) 3-4 2 2-4 1.5
ComputingARM processors,
extra PC
STM32F4 MCU,
Intel processorIntel Core i7
custom control
computing system
Software Ubuntu Linux OS Linux OS QNXGRPC-based API
Python client library
Application Research, Industrial Research Research, Industrial Research, Industrial
16
Chapter 2
Robot Specifications and
Mechanical Structure
2.1 Introduction
This chapter presents the overall specifications and the mechanical structure of the
quadruped robot. Firstly, the robot specifications in terms of mechanical and elec-
tronic properties are introduced in Section 2.2. Then the robot structure is shown
in 2.3, with focus on the kinematic structure, torso and legs. To further explain two
common walking patterns, principles of the robot leg motion are analyzed based on
the structures of hip and knee joints. Furthermore, a development process of the
thesis project is given in Section 2.4.
2.2 Robot Specifications
The robot mechanical structure is mainly built in a high-strength aluminum alloy
and stainless steel. Each leg features 3 DOFs and has compliance to moderate foot-
ground impact. The joints are fully actuated by 12 Maxon DC motors; each rotation

17
angle is measured by a potentiometer and controlled by a STM32F4 microcontroller.
The 3D-CAD model of the robot with components description is shown in Figure 2.1.
The key specifications of the quadruped robot are summarized in Table 2.1.
Torso
Driver Board Power
Right Hind Leg
Right Front Leg
Left Hind Leg
Left Front Leg
Potentiometer
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.1: Robot 3D-CAD model with components description.
Table 2.1: Key specifications of the designed quadruped robot.
Specification Value
Dimensions (L×W×H;cm) 52×15×10
DOF 12; 3 per leg
Weight (kg) 8.8
Leg spring compliance (N/m) 5250
Joint range of motion () 200
Motor drive L298N
Actuators Swiss Maxon DC motor
Sensors potentiometers, IMU
Computing STM32F407VET6
Software Keil uVision5 with custom C code
18
2.3 Robot Structure
2.3.1 Kinematic Structure
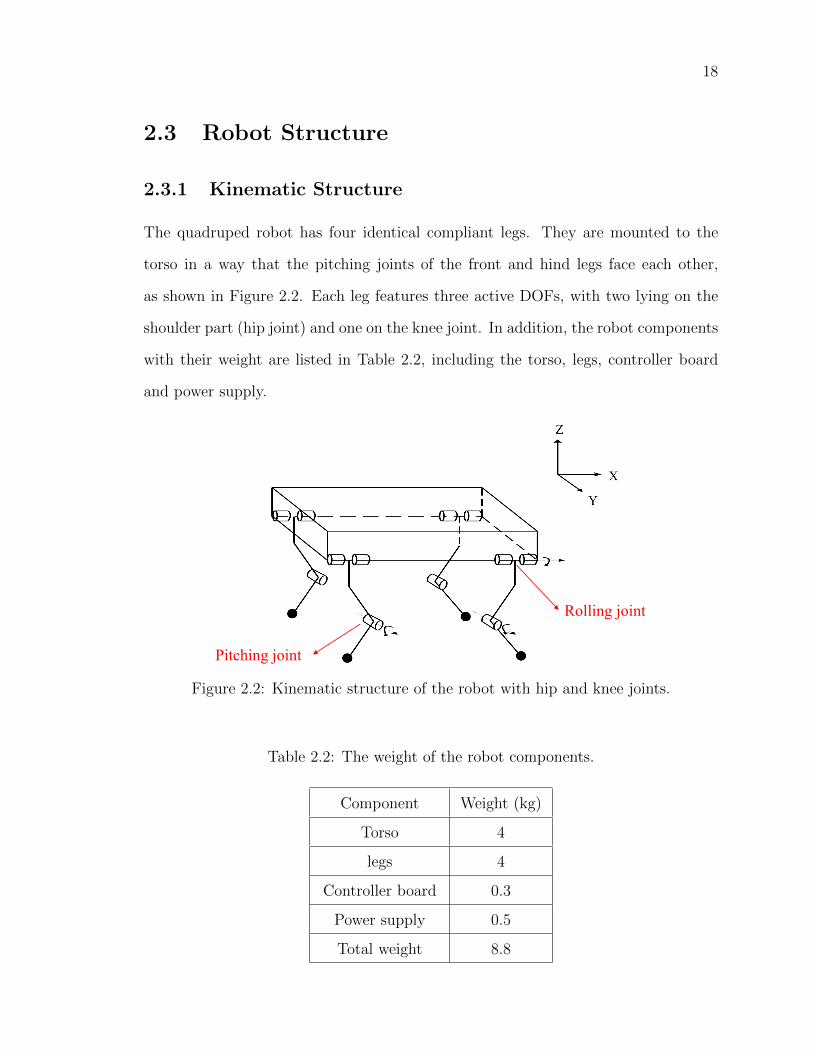
The quadruped robot has four identical compliant legs. They are mounted to the
torso in a way that the pitching joints of the front and hind legs face each other,
as shown in Figure 2.2. Each leg features three active DOFs, with two lying on the
shoulder part (hip joint) and one on the knee joint. In addition, the robot components
with their weight are listed in Table 2.2, including the torso, legs, controller board
and power supply.
Pitching joint
Rolling joint
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.2: Kinematic structure of the robot with hip and knee joints.
Table 2.2: The weight of the robot components.
Component Weight (kg)
Torso 4
legs 4
Controller board 0.3
Power supply 0.5
Total weight 8.8

19
2.3.2 Torso
The torso, is designed not only to carry most of the robot components, but also to
provide a rigid platform for four legs to be easily mounted. In order to achieve weight
reduction and balance of the robot, some lightweight components are utilized and
symmetrically assembled on the main body. To ensure the construction materials
to be strong and impact-resistance, most parts of the robot including the torso, are
constructed by aluminum alloys 6061 that features high strength and toughness. The
main torso components are listed in Table 2.3.
Table 2.3: Torso components of the quadruped robot.
Component Quantity
Swiss Maxon DC motor 41.022.022 8
Sakae 22HP-10 Potentiometer 8
Aluminum plates 6
Timing belt 8
Bevel gear 8
Pulley 16
2.3.3 Legs
Among all components of the robot, legs are the most important parts. The prop-
erties, such as the weight, dimensions and joint actuation, will directly influence the
motion performance of legs and therefore the robot. Each leg consists of a hip joint,
thigh, knee joint, shank and a foot for ground contact.
The brass shaft is fixed along the motor shaft by a set of screw, and expected
to rotate synchronously with the motor. Pulley 1, sleeved on the brass shaft, is
connected to the pulley 2 via a timing belt to transfer the torque from the motor to
the pin joint. Different from the common structure in [42, 43] , three identical bevel
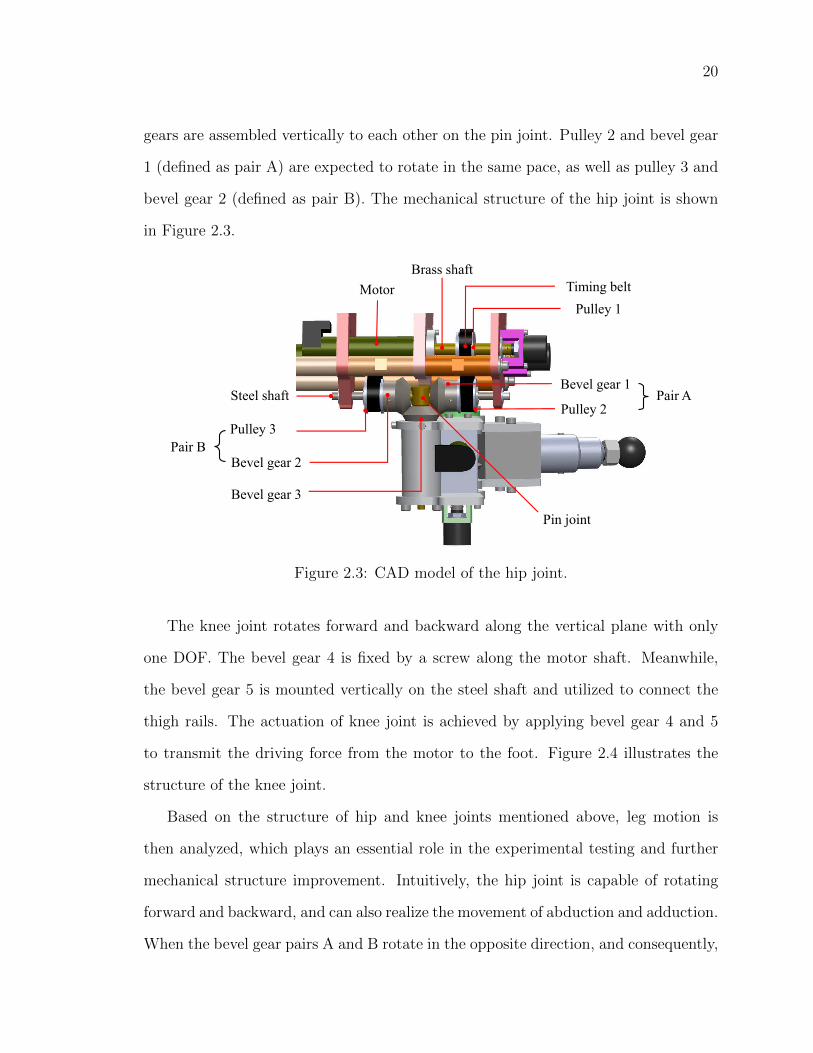
20
gears are assembled vertically to each other on the pin joint. Pulley 2 and bevel gear
1 (defined as pair A) are expected to rotate in the same pace, as well as pulley 3 and
bevel gear 2 (defined as pair B). The mechanical structure of the hip joint is shown
in Figure 2.3.
Pulley 3
Bevel gear 2
Motor
Brass shaft
Timing belt
Pulley 1
Pulley 2
Bevel gear 1
Bevel gear 3
Pin joint
Steel shaft Pair A
Pair B
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.3: CAD model of the hip joint.
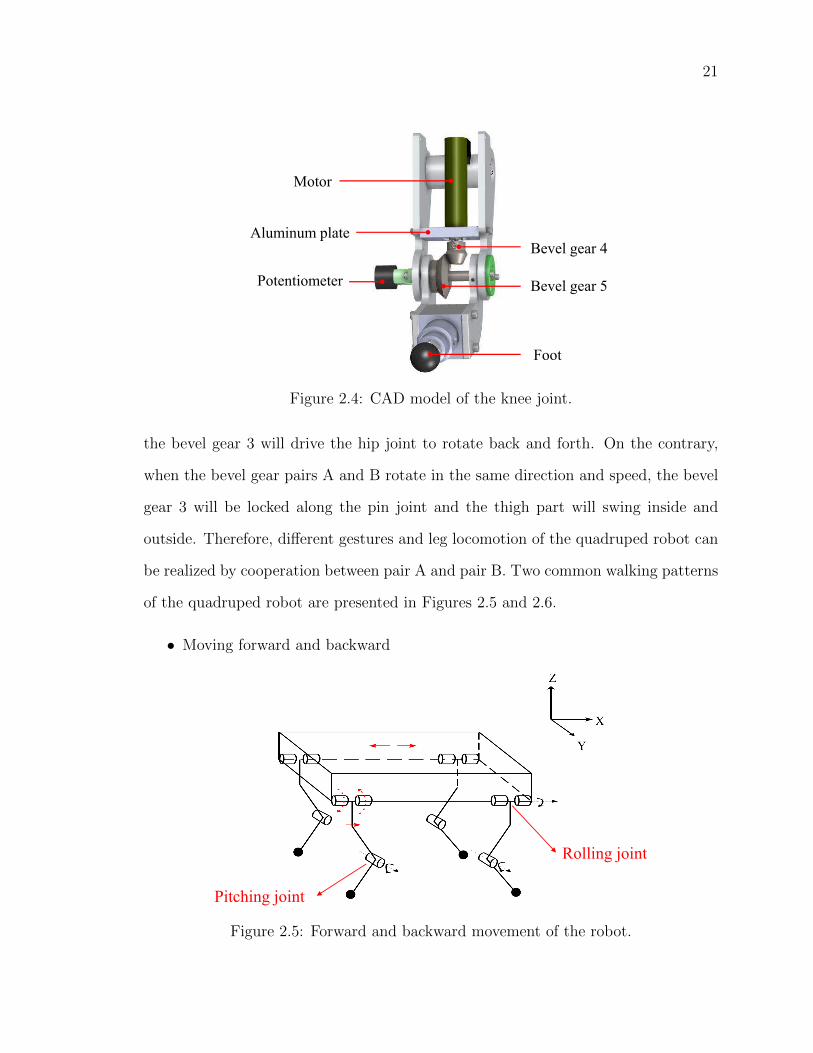
The knee joint rotates forward and backward along the vertical plane with only
one DOF. The bevel gear 4 is fixed by a screw along the motor shaft. Meanwhile,
the bevel gear 5 is mounted vertically on the steel shaft and utilized to connect the
thigh rails. The actuation of knee joint is achieved by applying bevel gear 4 and 5
to transmit the driving force from the motor to the foot. Figure 2.4 illustrates the
structure of the knee joint.
Based on the structure of hip and knee joints mentioned above, leg motion is
then analyzed, which plays an essential role in the experimental testing and further
mechanical structure improvement. Intuitively, the hip joint is capable of rotating
forward and backward, and can also realize the movement of abduction and adduction.
When the bevel gear pairs A and B rotate in the opposite direction, and consequently,
21
Motor
Bevel gear 4
Bevel gear 5Potentiometer
Foot
Aluminum plate
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.4: CAD model of the knee joint.
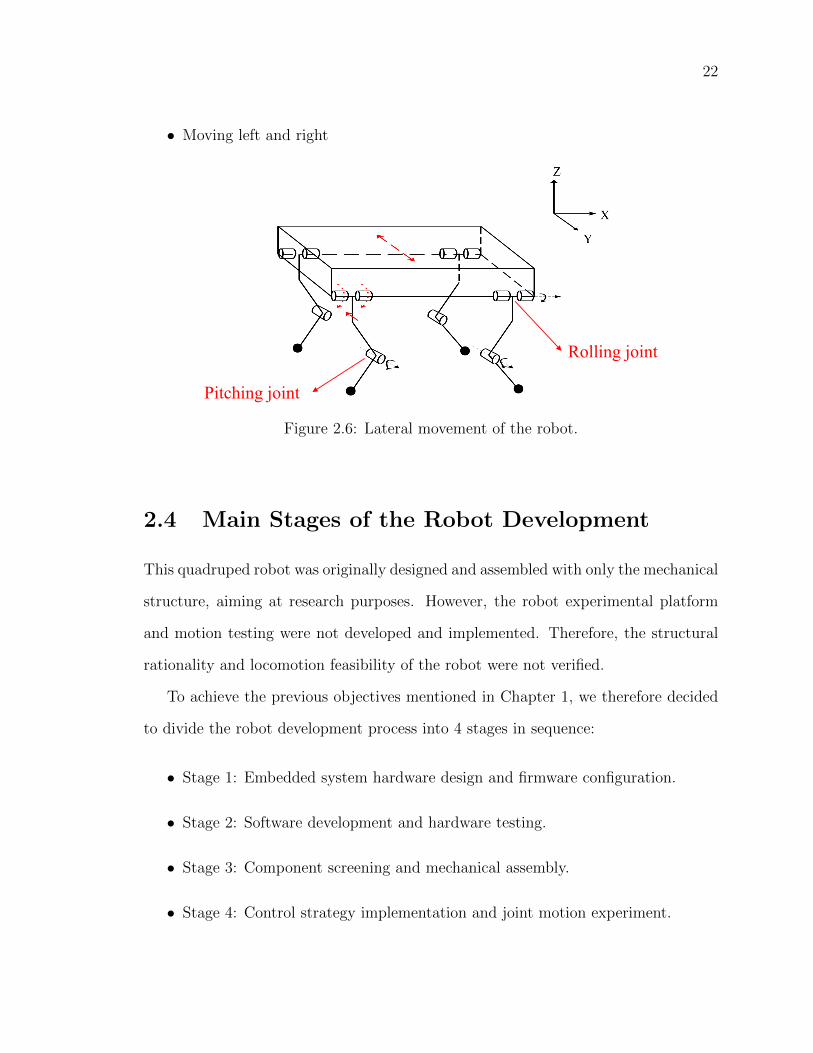
the bevel gear 3 will drive the hip joint to rotate back and forth. On the contrary,
when the bevel gear pairs A and B rotate in the same direction and speed, the bevel
gear 3 will be locked along the pin joint and the thigh part will swing inside and
outside. Therefore, different gestures and leg locomotion of the quadruped robot can
be realized by cooperation between pair A and pair B. Two common walking patterns
of the quadruped robot are presented in Figures 2.5 and 2.6.
• Moving forward and backward
Pitching joint
Rolling joint
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.5: Forward and backward movement of the robot.
22
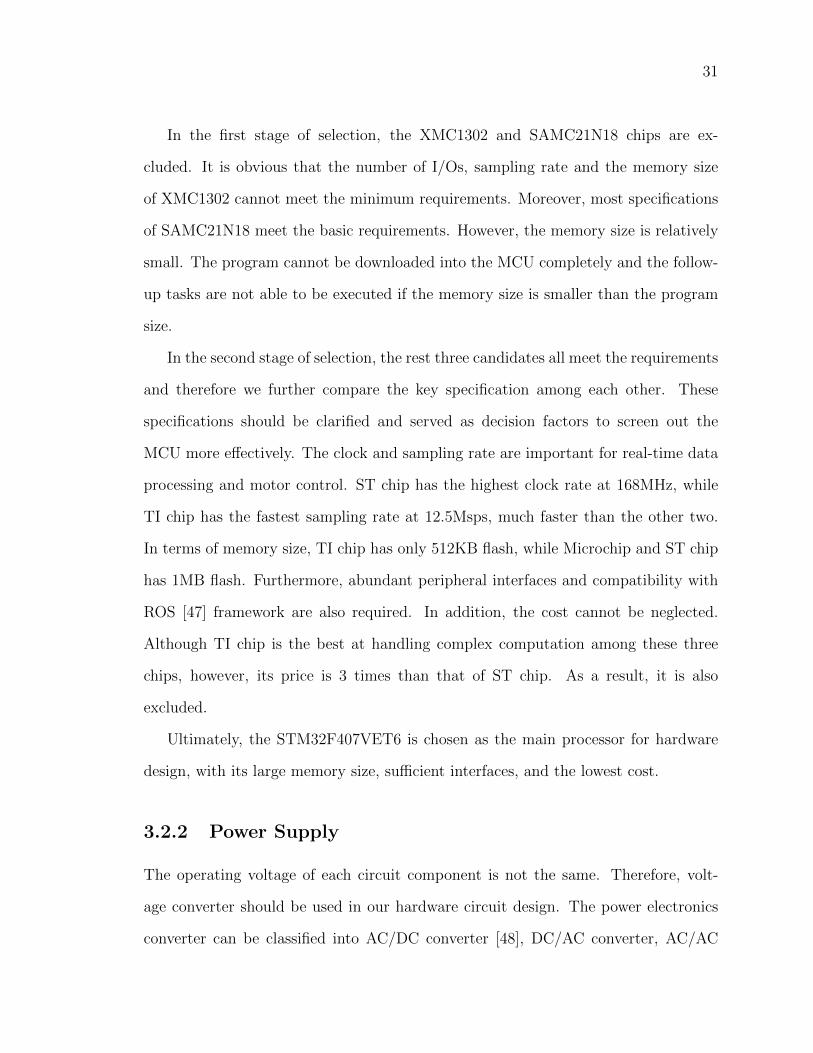
• Moving left and right
Pitching joint
Rolling joint
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 2.6: Lateral movement of the robot.
2.4 Main Stages of the Robot Development
This quadruped robot was originally designed and assembled with only the mechanical
structure, aiming at research purposes. However, the robot experimental platform
and motion testing were not developed and implemented. Therefore, the structural
rationality and locomotion feasibility of the robot were not verified.
To achieve the previous objectives mentioned in Chapter 1, we therefore decided
to divide the robot development process into 4 stages in sequence:
• Stage 1: Embedded system hardware design and firmware configuration.
• Stage 2: Software development and hardware testing.
• Stage 3: Component screening and mechanical assembly.
• Stage 4: Control strategy implementation and joint motion experiment.

23
2.5 Conclusions
The quadruped robot has the following torso dimensions of 52cm×15cm×10cm (L×W
×H) and weighs 8.8kg in total. After a brief system overview, the mechanical struc-
ture of the robot is discussed systemically including the kinematic structure and
descriptions of torso and leg. Next, the geared architecture of hip and knee joints
are discussed to specify the leg motion principles. Each joint is actuated by a Swiss
Maxon DC motor that provides relatively low speed and high driving torque. In
addition, two types of walking patterns are illustrated based on the collaboration of
bevel gears. The chapter ends with a development procedure of the project, which
will be discussed in the following chapters.

24
Chapter 3
Embedded System Hardware
Design
3.1 Introduction
As a typical type of embedded system, the quadruped robot is characterized by strong
correlation between hardware and software. Therefore, during the development of a
robotic embedded system, a methodology of hardware/software co-design is emerged
frequently to meet system demands in an optimized manner. However, without the
basic and essential support of hardware platform, software and experimental tests are
meaningless and cannot be further conducted. Moreover, the onboard hardware is
usually customized for specific applications, which in turn integrates with a number of
heterogeneous components, and thus increases the complexity of the hardware design.
The hardware used to control the quadruped robot went through two versions,
which are both designed in Altium Designer [44]. The first version of the driver
board consists of all the required components with H-bridge circuitry symmetrically
distributed on both sides of the board. Unfortunately, due to the issues brought by

25
the irrational MCU pin allocation, excessive welding elements, and improper bypass
components, the chip was damaged by the unexpected current or voltage in the
experiment.
Chapter 3 introduces the hardware design of the embedded system. Firstly, we
introduce the selection of the main components, including MCU and power supply.
Secondly, after illustrating the hardware architecture, we discuss the circuit schematic
design for each functional module. Finally, we present and compare two versions of
the printed circuit board design. Figure 3.1 shows the appearance of two versions of
the PCB.
Figure 3.1: First version of the PCB (left) and second version of the PCB (right).
3.2 Component Selection
Component selection is an indispensable stage of the embedded system design, which
is usually prior or parallel to the software development. In order to build an embedded
system fulfilling the requirements, it is important to consider hardware properties,
functional requirements and comprehensive marketing research.

26
3.2.1 Microcontroller
A microcontroller is essentially a small computer, running on a single integrated chip.
It incorporates the memory, general input/output interfaces, and other peripherals.
The related most important factors [45] are shown as follows:
• Application
Our objective is to achieve motor speed and position control. To handle compute-
intensive tasks, such as massive A/D conversions and data filtering, which require
strong computing capability, we prefer to choose a floating point unit (FPU) for the
hardware design to better perform operations involving a lot of decimal numbers.
• Clock rate
Generally, motor control applications use a sampling rate of 100ksps or higher. How-
ever, the higher the clock rate is, the more power the system will consume. In
addition, the anti-interference performance is inversely proportional to the MCU op-
erating speed. Therefore, an MCU that features high clock rate with low power
consumption is definitely ideal. For our case, 12 DC motors are controlled in parallel,
which requires the sampling rate to be greater than 1Msps.
• Number of pinout and I/Os
Generally, a hardware block diagram is utilized to enumerate all the external interfaces
supported by the MCU. There are two types of interfaces which are commonly listed.
The first type is the communication interface, which affects the program space of the
MCU, i.e., USB, SWD, UART, etc. The second type is the digital inputs/outputs,
A/D inputs, PWM, etc. The two types of interfaces straightly dictate the number of
I/O pins required by the microcontroller. Figure 3.2 illustrates the hardware block
diagram of the MCU with required I/Os.

27
2 I/O
IC
2 I/O
2 I/O
12 I/O
2 I/O
24 I/O 12 I/O
10 I/O 2 I/O
Reserved
I/OButton
SWD
ADC
Input
USART
Motor
Input
Motor
PWM
Power
LED
Motor
LED
Program
LED
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.2: Block diagram of MCU with required I/Os.
• Memory requirements
There are three different types of memory associated with an MCU: Flash, SRAM
and EEPROM. The required memory depends on the size of the software. However, it
might not be easy to evaluate and instead, the workload of the MCU can be estimated
and predicted. For our case, it is critical to ensure that the program space is enough,
as the amount of code containing real-time applications and data optimization is
relatively large. The MCU with medium or large size memory is relatively suitable
in our hardware design.
• Bit size
Selecting an MCU with proper bit size is another basic requirement. For instance,
using an unsigned integer requires 16-bit of memory due to the data type. However,
the most significant byte may be lost if the data is executed on an 8-bit MCU. For
our case, the bit size of the MCU should be at least 16-bit, thus 32-bit MCU is the

28
most proper choice. Figure 3.2 illustrates the embedded market share of processors
in terms of bit size, researched by global electronics industry magazine “EE Times”.
© 2017 Copyright by AspenCore. All rights reserved.2017 Embedded Markets Study
70
12%9%
63%
13%
3%
9%
13%
68%
8%
3%
11%15%
64%
7%
3%
12%14%
63%
8%
3%
13%16%
63%
7%
2%
8-bit processor 16-bit processor 32-bit processor 64-bit processor Don’t know
2017 (N = 760) 2015 (N = 1,030) 2014 (N = 1,383) 2013 (N = 2,056) 2012 (N = 1,666)
My current embedded project's main processor is a:
Note. 52% of respondents said additional processors (if any) were 32-bit processors, 18% said they added 8-bit
processors, 14% added 16-bit processors, and 11% added 64-bit processors to their current embedded project.
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.3: Main processor bit size in 2017 embedded markets study [46].
• Development tools, cost and compatibility
It is prior to use an MCU with resourceful toolkit, i.e., data sheet, code samples, and
preferably a large online community, which can reduce the development time. Mean-
while, it is necessary to reduce the cost of components and the entire project as much
as possible on the premise of guaranteed performance. In our design, the compati-
bility of MCU is also considered. To realize the hierarchical communication between
high-level and underlying controller, the chip is required to work harmoniously on at
least two development platforms with assistance of compatible firmware.
Furthermore, some general principles of chip selection are listed as follows. Firstly,
to reduce energy consumption and extend the equipment life cycle, we prefer to
use low power MCU. Moreover, the chip with ‘QFP’ package is often adopted for
products with limited size, thereby reducing costs while simultaneously contributing
to electromagnetic compatibility (EMC) design.

29
Based on the above evaluation criteria, the minimum requirements of the ideal
MCU in terms of the performance specifications are summarized in Table 3.1.
Table 3.1: Specification requirements of the microcontroller.
Index Value
Pin count ≥80
I/O count ≥68
ADC pin count ≥12
Clock rate (MHz) ≥48
Bit size (bit) ≥16
Sampling rate (Msps) ≥1
Flash size (KB) ≥512
SRAM size (KB) ≥64
ADC resolution (bit) 12
Supply voltage (V) 1.8-5.5
Cost (USD) ≤10
The MCU is essentially chosen from the various semiconductor manufacturers.
After conducting the MCU marketing research in the field of motor control and real-
time data processing, 5 MCUs were finally taken into consideration, as illustrated in
Table 3.2.
The selection of MCU is conducted according to the following two steps:
• We first pick out the candidates that satisfy the minimum requirements by
comparing each indicator between the product and ideal MCU.
• Among the rest candidates, we estimate and screen out the most suitable MCU,
based on the key specifications, compatibility and the cost.

30
Table 3.2: Comparison of specifications of 5 MCUs.
Index
MCU Infineon
XMC1302
Microchip
SAMC21N18
Microchip
SAMD51N20
STMicroelectronics
STM32F407VET6
Texas Instruments
TMS320F28335
CoreARM
Cortex-M0
ARM
Cortex-M0+
ARM
Cortex-M4F
ARM
Cortex-M4F
DSP
C28x
Pin count 40 100 100 100 176
I/O count 34 84 81 82 88
Clock rate (MHz) 32 48 120 168 150
Sampling rate (Msps) 0.75 1 1 2.4 12.5
Bit size (bit) 32 32 32 32 32
Flash size (KB) 200 128/256 1024 1024 512
SRAM size (KB) 16 16/32 256 192 68
ADC resolution (bit)12×1
16 CHx
12×2
20 CHx
12×2
20 CHx
12×3
16 CHx
12×2
16 CHx
Supply voltage (V) 1.8-5.5 1.6-5.5 1.7-3.6 1.8-3.6 1.8-3.3
Package VQFN-40 TQFP-100 TQFP-100 LQFP-100 LQFP-176
Interface typeSPI, UART
I2C, I2S
SPI, UART
I2C, CAN
SPI, UART
I2C, CAN
SPI, UART/USART
I2C, I2S, SDIO, USB
SPI, UART
I2C, CAN
FPU N/A N/A X X X
Development tools X X X X X
Compatibility X X X X X
Cost (USD) 3.91 3.84 6.17 4.77 14.25
31
In the first stage of selection, the XMC1302 and SAMC21N18 chips are ex-
cluded. It is obvious that the number of I/Os, sampling rate and the memory size
of XMC1302 cannot meet the minimum requirements. Moreover, most specifications
of SAMC21N18 meet the basic requirements. However, the memory size is relatively
small. The program cannot be downloaded into the MCU completely and the follow-
up tasks are not able to be executed if the memory size is smaller than the program
size.
In the second stage of selection, the rest three candidates all meet the requirements
and therefore we further compare the key specification among each other. These
specifications should be clarified and served as decision factors to screen out the
MCU more effectively. The clock and sampling rate are important for real-time data
processing and motor control. ST chip has the highest clock rate at 168MHz, while
TI chip has the fastest sampling rate at 12.5Msps, much faster than the other two.
In terms of memory size, TI chip has only 512KB flash, while Microchip and ST chip
has 1MB flash. Furthermore, abundant peripheral interfaces and compatibility with
ROS [47] framework are also required. In addition, the cost cannot be neglected.
Although TI chip is the best at handling complex computation among these three
chips, however, its price is 3 times than that of ST chip. As a result, it is also
excluded.
Ultimately, the STM32F407VET6 is chosen as the main processor for hardware
design, with its large memory size, sufficient interfaces, and the lowest cost.
3.2.2 Power Supply
The operating voltage of each circuit component is not the same. Therefore, volt-
age converter should be used in our hardware circuit design. The power electronics
converter can be classified into AC/DC converter [48], DC/AC converter, AC/AC

32
converter, DC/DC converter [49]. These converters can be also divided into buck or
boost converters [50]. There are two approaches to regulate the low DC voltage to
the final rail voltage: Utilizing either an LDO [51] or a DC/DC switching converter.
The LDO can be only used in buck applications, while the switching regulator can
either be designed to boost or buck the output, or even do both seamlessly.
When the voltage difference between input and output is very large, the switching
regulator is always the first choice, primarily due to its high efficiency. However, If the
input and output voltages are close, the LDO is often adopted, because its inefficiency
relative to the switcher is often negligible and switching noise is not generated. The
differences between these two types of regulators are shown in Table 3.3.
Table 3.3: Comparison of the characteristics of LDO and switching regulators.
Index
TypeLDO converter Switching regulator
Conversion efficiency Low High
Ripple wave Small Big
Noise Low High
Function Buck Boost/Buck, Buck-Boost
Application scenario
Buck circuit
Power isolation
Filtering
Boost/Buck circuit
Charge pump
Inductive energy storage
Size Small Large
Complexity Low High
Heat generation High Low
Cost Low Relatively high

33
To design the power supply module, we purpose three possible solutions as follows:
• Solution 1: 24V to 5V, 5V to 3.3V LDO regulator.
• Solution 2: 24V to 12V, 12V to 5V, 5V to 3.3V LDO regulator.
• Solution 3: 24V to 5V switching regulator, 5V to 3.3V LDO regulator.
In Solution 1, the 24V/5V LDO is relatively not common. More importantly, there
is a 19V voltage drop during the conversion. When the power supply current reaches
100mA, the dissipation power is 1.9W, which will heat up the MCU severely. In
Solution 2, the cost is much higher and the overall power loss is also large. In Solution
3, the switching regulator has a large voltage regulation range with a small energy
loss. Meanwhile, the LDO is used to drop the voltage from 5V to 3.3V, which can
guarantee the performance with reasonable cost. In conclusion, solution 3 is finally
adopted. Figure 3.4 illustrates the power distribution of the quadruped robot.
AC/DC
Convertor
LM2596S-5
LM1117-3V3
Motor power
supply
L298N motor
drive
MCU/
peripherals
24V
5V
3.3V
110V AC
Voltage input110V
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.4: Power distribution of the quadruped robot.
34
The power supply of the quadruped robot can be divided into three parts: 24V
for actuating 12 brushless DC motor, 5V for driving L298N motor drive and 3.3V
for controlling the MCU and peripheral components, respectively. In consideration
of convenience and durability of the experiment, an 110/220V-24V AC/DC regulated
power supply is adopted, instead of a rechargeable battery.
3.3 Circuit Schematic Design
This section presents the circuit schematic design of the embedded system. After
determining the overall hardware architecture, the circuit diagram for each functional
module is ready to be designed. In order to better illustrate the different design
methods and improvements of the two versions, circuitry regarding each component
will be shown and compared.
3.3.1 Hardware Architecture
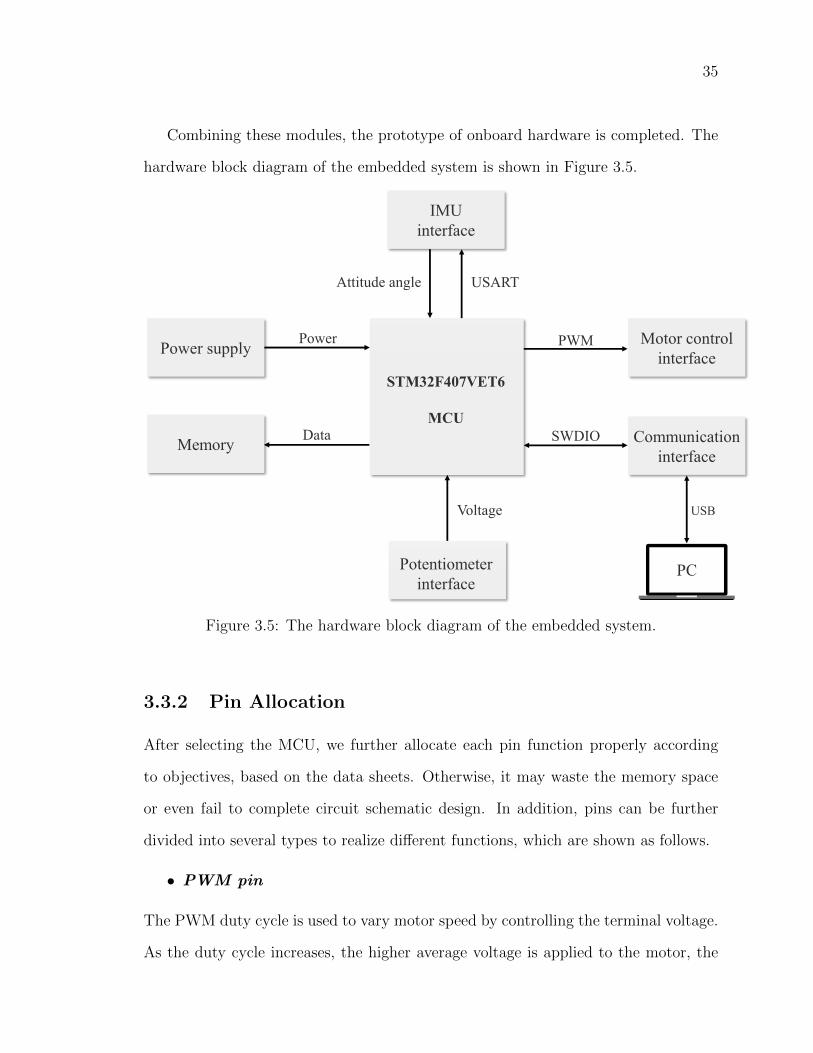
The modular hardware architecture consists of:
• STM32F407VET6 microcontroller.
• IMU: Measures the real-time attitude angle of the robot.
• Memory: Stores the basic firmware and programs of the control tasks.
• Motor control interface: Connects with the L298N motor drive circuitry.
• Potentiometer: Sends back the analog value of the joint position to the MCU.
• Communication interface: Connects with the PC and downloads the programs.
• Power supply: Provides the power to actuate the DC motors and the circuitry.
35
Combining these modules, the prototype of onboard hardware is completed. The
hardware block diagram of the embedded system is shown in Figure 3.5.
IMU
interface
Communication
interface
STM32F407VET6
MCU
Motor control
interfacePower supply
Memory
Potentiometer
interface
PWM
SWDIO
Power
Data
Voltage
Attitude angle USART
PC
USB
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.5: The hardware block diagram of the embedded system.
3.3.2 Pin Allocation
After selecting the MCU, we further allocate each pin function properly according
to objectives, based on the data sheets. Otherwise, it may waste the memory space
or even fail to complete circuit schematic design. In addition, pins can be further
divided into several types to realize different functions, which are shown as follows.
• PWM pin
The PWM duty cycle is used to vary motor speed by controlling the terminal voltage.
As the duty cycle increases, the higher average voltage is applied to the motor, the

36
faster the motor will rotate. In STM32F4 data sheet [52], timer output pins in
compare mode are preferred to generate PWM waveform instead of others.
• Analog/Digital pin
The analog-to-digital pins of MCU are directly connected to the terminal pin of the
potentiometer. Hence, the pins with ADC function can be allocated only. To improve
conversion accuracy, the ADC has an independent power supply that can be filtered
separately, and shielded from noise on the PCB.
• SWD pin
Serial Wire Debug (SWD) provides a debug port for small package MCUs. In order
to communicate with a device via SWD, 2 pins are required to connect with the
processor: SWDIO pin transmits and receives bi-directional data, while SWCLK pin
is used to synchronize the clock signal.
• USART pin
The USART is a microchip that facilitates communication through a computer serial
port using RS-232C protocol. The USART pins send the information of robot attitude
angle gathered from IMU to the microcontroller.
• Power supply/GND pin
The circuit is powered by a stabilized power supply VDD. Meanwhile, the ground pins,
such as VSS and VSSA must always be connected to the external power supply. In
addition, decoupling capacitors should be also considered to filter out high-frequency
noise from the power source.
After assigning each pin functions reasonably, the resource of MCU can be better
utilized, which further increases the efficiency of hardware design. Figure 3.6 shows
the overall circuit schematic diagram of the microcontroller.
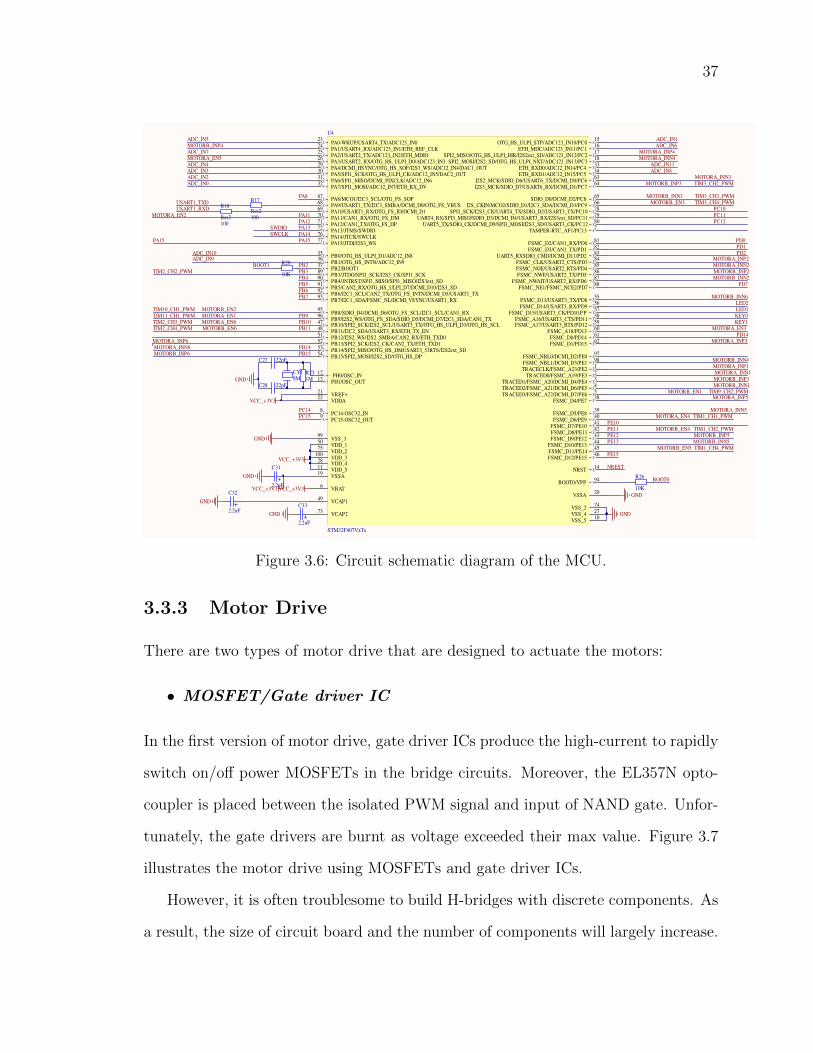
37
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
D D
C C
B B
A A
Title
Number RevisionSize
A1
Date: 2019/9/17 Sheet ofFile: D:\UVIC机器狗\..\ motor_controller.SchDocDrawn By:
FB4
VIN1
ON/OFF5
GND3
TAB6
OUT2
U2
LM2596S-5
101
L1
D13SS34
330uF/35VC11
VCC_+5V
GND
1KR6
LED1
GND
104
C12
VCC_+24VVCC_+5V
VCC_+5V
330uF/35VC43
VIN1
VOUT3
2
GND
U3 LM1117-3V3
100nF
C15
100nF
C13
VCC_+3V3R5
0R
330uF/35VC16
VCC_+5V
BOOT0/VPP94
VCAP273
NRST14
PH0/OSC_IN12
PH1/OSC_OUT13
PA0-WKUP/USART4_TX/ADC123_IN023
PA1/USART4_RX/ADC123_IN1/ETH_REF_CLK24
PA2/USART2_TX/ADC123_IN2/ETH_MDIO25
PA3/USART2_RX/OTG_HS_ULPI_D0/ADC123_IN326
PA4/DCMI_HSYNC/OTG_HS_SOF/I2S3_WS/ADC12_IN4/DAC1_OUT29
PA5/SPI1_SCK/OTG_HS_ULPI_CK/ADC12_IN5/DAC2_OUT30
PA6/SPI1_MISO/DCMI_PIXCLK/ADC12_IN631
PA7/SPI1_MOSI/ADC12_IN7/ETH_RX_DV32
PA8/MCO1/I2C3_SCL/OTG_FS_SOF67
PA9/USART1_TX/I2C3_SMBA/DCMI_D0/OTG_FS_VBUS68
PA10/USART1_RX/OTG_FS_ID/DCMI_D169
PA11/CAN1_RX/OTG_FS_DM70
PA12/CAN1_TX/OTG_FS_DP71
PA13/JTMS/SWDIO72
PA14/JTCK/SWCLK76
PA15/JTDI/I2S3_WS77
PB0/OTG_HS_ULPI_D1/ADC12_IN835
PB1/OTG_HS_INTN/ADC12_IN936
PB2/BOOT137
PB3/JTDO/SPI3_SCK/I2S3_CK/SPI1_SCK89
PB4/JNTRST/SPI3_MISO/SPI1_MISO/I2S3ext_SD90
PB5/CAN2_RX/OTG_HS_ULPI_D7/DCMI_D10/I2S3_SD91
PB6/I2C1_SCL/CAN2_TX/OTG_FS_INTN/DCMI_D5/USART1_TX92
PB7/I2C1_SDA/FSMC_NL/DCMI_VSYNC/USART1_RX93
PB8/SDIO_D4/DCMI_D6/OTG_FS_SCL/I2C1_SCL/CAN1_RX95
PB9/I2S2_WS/OTG_FS_SDA/SDIO_D5/DCMI_D7/I2C1_SDA/CAN1_TX96
PB10/SPI2_SCK/I2S2_SCL/USART3_TX/OTG_HS_ULPI_D3/OTG_HS_SCL47
PB11/I2C2_SDA/USART3_RX/ETH_TX_EN48
PB12/I2S2_WS/I2S2_SMBA/CAN2_RX/ETH_TXD051
PB13/SPI2_SCK/I2S2_CK/CAN2_TX/ETH_TXD152
PB14/SPI2_MISO/OTG_HS_DMUSART3_53RTS/I2S2ext_SD53
PB15/SPI2_MOSI/I2S2_SD/OTG_HS_DP54
OTG_HS_ULPI_STP/ADC123_IN10/PC015
ETH_MDC/ADC123_IN11/PC116
SPI2_MISO/OTG_HS_ULPI_DIR/I2S2ext_SD/ADC123_IN12/PC217
SPI2_MOSI/I2S2_SD/OTG_HS_ULPI_NXT/ADC123_IN13/PC318
ETH_RXD0/ADC12_IN14/PC433
ETH_RXD1/ADC12_IN15/PC534
I2S2_MCK/SDIO_D6/USART6_TX/DCMI_D0/PC663
I2S3_MCK/SDIO_D7/USART6_RX/DCMI_D1/PC764
SDIO_D0/DCMI_D2/PC865
I2S_CKIN/MCO2/SDIO_D1/I2C3_SDA/DCMI_D3/PC966
SPI3_SCK/I2S3_CK/UART4_TX/SDIO_D2/USART3_TX/PC1078
UART4_RX/SPI3_MISO/SDIO_D3/DCMI_D4/USART3_RX/I2S3ext_SD/PC1179
UART5_TX/SDIO_CK/DCMI_D9/SPI3_MOSI/I2S3_SD/USART3_CK/PC1280
TAMPER-RTC_AF1/PC137
PC14-OSC32_IN8
PC15-OSC32_OUT9
FSMC_D2/CAN1_RX/PD081
FSMC_D3/CAN1_TX/PD182
UART5_RXSDIO_CMD/DCMI_D11/PD283
FSMC_CLK/USART2_CTS/PD384
FSMC_NOE/USART2_RTS/PD485
FSMC_NWE/USART2_TX/PD586
FSMC_NWAIT/USART2_RX/PD687
FSMC_NE1/FSMC_NCE2/PD788
FSMC_D13/USART3_TX/PD855
FSMC_D14/USART3_RX/PD956
FSMC_D15/USART3_CK/PD10 P P57
FSMC_A16/USART3_CTS/PD1158
FSMC_A17/USART3_RTS/PD1259
FSMC_A18/PD1360
FSMC_D0/PD1461
FSMC_D1/PD1562
FSMC_NBL0/DCMI_D2/PE097
FSMC_NBL1/DCMI_D3/PE198
TRACECLK/FSMC_A23/PE21
TRACED0/FSMC_A19/PE32
TRACED1/FSMC_A20/DCMI_D4/PE43
TRACED2/FSMC_A21/DCMI_D6/PE54
TRACED3/FSMC_A22/DCMI_D7/PE65
FSMC_D4/PE738
FSMC_D5/PE839
FSMC_D6/PE940
FSMC_D7/PE1041
FSMC_D8/PE1142
FSMC_D9/PE1243
FSMC_D10/PE1344
FSMC_D11/PE1445
FSMC_D12/PE1546
VDD_150
VDD_275
VDD_3100
VDD_428
VDD_511
VDDA22
VSSA20
VREF+21
VCAP149
VSS_274
VSS_399
VSS_427
VSS_510
VSSA19
VBAT6
U4
STM32F407VxTx
PE10PE11PE12PE13
PE15
PA8
PA11PA12PA13PA14PA15
PB3PB4PB5PB6PB7
PB9PB10PB11
PB14PB15
CY18M
C27 22pF
C28 22pF
C33
2.2uF
BOOT0
NREST
R26
10K
R810K
C18100nF
RST1
NREST
SWDIOSWCLK
D14
D15
LED1
LED2
LED1LED2
R20
10K
123
456
P7
Header 3X2A
BOOT1
BOOT1 BOOT0
12345
P1
Header 5
12345
P2
Header 5
12345
P3
Header 5
PC14PC15
R9
1K
R11
1K
KEY0
PB2
C32
2.2uF
R231M
C31
2.2uF
VCC_+5V VCC_+3V3
GND
GND
GND
GND
GND
GND
GND
GND
GND
VCC_+3V3VCC_+3V3
VCC_+3V3
VCC_+3V3
VCC_+3V3 VCC_+3V3
VCC_+3V3
C36100nF
C37100nF
C38100nF
C39100nF
C40100nF
C41100nF
C42100nF
GNDGND
GND
VCC_+3V3
12345
P5
Header 5
NREST
SWDIOSWCLK
VCC_+3V3
SW1
SW2
KEY0
KEY1GND
GND
VCC_+3V3
ADC_IN0
ADC_IN1
ADC_IN2ADC_IN3ADC_IN4
ADC_IN5ADC_IN6
ADC_IN7
ADC_IN8
ADC_IN9ADC_IN10
ADC_IN11
TIM1_CH1_PWM
TIM1_CH2_PWM
TIM1_CH4_PWM
PA15
TIM2_CH2_PWM
TIM2_CH3_PWMTIM2_CH4_PWM
TIM3_CH2_PWM
TIM3_CH3_PWMTIM3_CH4_PWM
123
JK1
22HP-10
100
R17
Res2
100
R18
Res2
USART1_TXDUSART1_RXD
1234
P6
VCC_+3V3
GND
USART1_TXDUSART1_RXD
VCC_+3V3
R12
470R
GND
ADC_IN0
123
JK2
22HP-10
VCC_+3V3
R13
470R
GND
123
JK3
22HP-10
VCC_+3V3
R14
470R
GND
123
JK4
22HP-10
VCC_+3V3
R15
470R
GND
123
JK5
22HP-10
VCC_+3V3
R16
470R
GND
123
JK6
22HP-10
VCC_+3V3
R19
470R
GND
123
JK7
22HP-10
VCC_+3V3
R21
470R
GND
123
JK8
22HP-10
VCC_+3V3
R22
470R
GND
123
JK9
22HP-10
VCC_+3V3
R25
470R
GND
123
JK10
22HP-10
VCC_+3V3
R27
470R
GND
123
JK11
22HP-10
VCC_+3V3
R28
470R
GND
123
JK12
22HP-10
VCC_+3V3
R29
470R
GND
ADC_IN1
ADC_IN2
ADC_IN3
ADC_IN4
ADC_IN5
ADC_IN6
ADC_IN7
ADC_IN8
ADC_IN9
ADC_IN10
ADC_IN11
1K
R7
LED2
GNDVCC_+3V3
1 2 3 4 5
6 7 8 910 P4
Header 5X2A
repeat(MOTORA_INP)
repeat(MOTORA_INN)
repeat(MOTORB_INP)
repeat(MOTORB_INN)
repeat(MOTORA_EN)
repeat(MOTORB_EN)
repeat(MOTOR_OUT_A+)
repeat(MOTOR_OUT_A-)
repeat(MOTOR_OUT_B+)
repeat(MOTOR_OUT_B-)
repeat
(VC
C_+
24
V)
repeat
(VC
C_+
5V
)
repeat
(VC
C_+
3V
3)
repeat
(GN
D)
repeat(DR,1,6)driver.SchDoc
VCC_+3V3
VCC_+5V
VCC_+24V
GND
MOTOR_OUT_A+[1..6]MOTOR_OUT_A+
MOTOR_OUT_A-[1..6]MOTOR_OUT_A-
MOTOR_OUT_B+[1..6]MOTOR_OUT_B+
MOTOR_OUT_B-[1..6]MOTOR_OUT_B-
MOTOR_OUT_A+1
MOTOR_OUT_A+2MOTOR_OUT_A+3MOTOR_OUT_A+4MOTOR_OUT_A+5MOTOR_OUT_A+6
MOTOR_OUT_A-1MOTOR_OUT_A-2MOTOR_OUT_A-3MOTOR_OUT_A-4MOTOR_OUT_A-5MOTOR_OUT_A-6
MOTOR_OUT_B+1MOTOR_OUT_B+2MOTOR_OUT_B+3MOTOR_OUT_B+4MOTOR_OUT_B+5MOTOR_OUT_B+6
MOTOR_OUT_B-1MOTOR_OUT_B-2MOTOR_OUT_B-3MOTOR_OUT_B-4MOTOR_OUT_B-5MOTOR_OUT_B-6
MOTOR_OUT_A+1MOTOR_OUT_A-1
MOTOR_OUT_A+2MOTOR_OUT_A-2
MOTOR_OUT_A+3MOTOR_OUT_A-3
MOTOR_OUT_A+4MOTOR_OUT_A-4
MOTOR_OUT_A+5MOTOR_OUT_A-5
MOTOR_OUT_A+6MOTOR_OUT_A-6
MOTOR_OUT_B+1MOTOR_OUT_B-1
MOTOR_OUT_B+2MOTOR_OUT_B-2
MOTOR_OUT_B+3MOTOR_OUT_B-3
MOTOR_OUT_B+4MOTOR_OUT_B-4
MOTOR_OUT_B+5MOTOR_OUT_B-5
MOTOR_OUT_B+6MOTOR_OUT_B-6
MOTORA_INP
MOTORA_INN
MOTORB_INP
MOTORB_INN
MOTORA_EN
MOTORB_EN
MOTORA_INP[1..6]
MOTORA_INN[1..6]
MOTORB_INP[1..6]
MOTORB_INN[1..6]
MOTORA_EN[1..6]
MOTORB_EN[1..6]
MOTORA_INP1
MOTORA_INP2MOTORA_INP3MOTORA_INP4MOTORA_INP5MOTORA_INP6
MOTORA_INN1
MOTORA_INN2MOTORA_INN3MOTORA_INN4MOTORA_INN5MOTORA_INN6
MOTORB_INP1
MOTORB_INP2MOTORB_INP3MOTORB_INP4MOTORB_INP5MOTORB_INP6
MOTORB_INN1
MOTORB_INN2MOTORB_INN3MOTORB_INN4MOTORB_INN5MOTORB_INN6
MOTORA_EN1
MOTORA_EN2MOTORA_EN3MOTORA_EN4MOTORA_EN5MOTORA_EN6
MOTORB_EN1
MOTORB_EN2MOTORB_EN3MOTORB_EN4MOTORB_EN5MOTORB_EN6
MOTORA_EN1
MOTORA_EN2
MOTORA_EN3
MOTORA_EN4
MOTORA_EN5
MOTORA_EN6
MOTORB_EN1
MOTORB_EN2
MOTORB_EN4
MOTORB_EN5
MOTORB_EN6
MOTORA_INP1
MOTORA_INP2
MOTORA_INP3
MOTORA_INP4
MOTORA_INP5
MOTORA_INP6
MOTORA_INN1
MOTORA_INN2
MOTORA_INN3
MOTORA_INN4
MOTORA_INN5
MOTORA_INN6
MOTORB_INP1
MOTORB_INP2
MOTORB_INP3
MOTORB_INP4
MOTORB_INP5
MOTORB_INP6
MOTORB_INN1
MOTORB_INN2
MOTORB_INN3
MOTORB_INN4
MOTORB_INN5
MOTORB_INN6
电机驱动
电机接口
角位移传感器接口陀螺仪模块接口程序运行指示灯启动方式选择复位程序下载
单片机
退耦
预留IO
电源 预留按键
104
C9
1KR10
100nF
C19
GND
100nF
C20
GND
100nF
C21
GND
100nF
C22
GND
100nF
C23
GND
100nF
C24
GND
100nF
C25
GND
100nF
C26
GND
100nF
C29
GND
100nF
C30
GND
100nF
C34
GND
100nF
C35
GND
100nFC10
GND
12
P30
Header 2
VCC_+24V
GND
GND12345
P31
Header 5
VCC_+24V
12
P8
Header 2
12
P9
Header 2
12
P10
Header 2
12
P11
Header 2
12
P12
Header 2
12
P13
Header 2
12
P14
Header 2
12
P15
Header 2
12
P16
Header 2
12
P17
Header 2
12
P18
Header 2
12
P19
Header 2
C44100nF
TIM9_CH2_PWM
TIM11_CH1_PWMTIM10_CH1_PWM
MOTORB_EN3
KEY1
PD7
PD
7PA
15
PC10
PC
10
PC11PC12
PC
11
PC
12
PD0PD1PD2
PD
0
PD
1
PD
2PA
8
PD14
PD
14
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10 PIC1101
PIC1102 COC11
PIC1201
PIC1202 COC12
PIC1301
PIC1302 COC13
PIC1501
PIC1502 COC15 PIC1601
PIC1602 COC16
PIC1801
PIC1802 COC18
PIC1901 PIC1902
COC19
PIC2001 PIC2002
COC20
PIC2101 PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702 COC27
PIC2801 PIC2802 COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3201 PIC3202
COC32
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601
PIC3602 COC36
PIC3701
PIC3702 COC37
PIC3801
PIC3802 COC38
PIC3901
PIC3902 COC39
PIC4001
PIC4002 COC40
PIC4101
PIC4102 COC41
PIC4201
PIC4202 COC42
PIC4301
PIC4302 COC43
PIC4401
PIC4402 COC44
PICY101
PICY102 COCY1
PID1301
PID1302 COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PIJK101
PIJK102
PIJK103
COJK1
PIJK201
PIJK202
PIJK203
COJK2
PIJK301
PIJK302
PIJK303
COJK3
PIJK401
PIJK402
PIJK403
COJK4
PIJK501
PIJK502
PIJK503
COJK5
PIJK601
PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PILED101
PILED102 COLED1
PILED201 PILED202
COLED2
PIP101
PIP102
PIP103
PIP104
PIP105
COP1
PIP201
PIP202
PIP203
PIP204
PIP205
COP2
PIP301
PIP302
PIP303
PIP304
PIP305
COP3
PIP401 PIP402 PIP403 PIP404 PIP405
PIP406 PIP407 PIP408 PIP409 PIP4010 COP4
PIP501
PIP502
PIP503
PIP504
PIP505
COP5
PIP601
PIP602
PIP603
PIP604
COP6
PIP701
PIP702
PIP703
PIP704
PIP705
PIP706
COP7
PIP801
PIP802
COP8
PIP901
PIP902
COP9
PIP1001
PIP1002
COP10
PIP1101
PIP1102
COP11
PIP1201
PIP1202
COP12
PIP1301
PIP1302
COP13
PIP1401
PIP1402
COP14
PIP1501
PIP1502
COP15
PIP1601
PIP1602
COP16
PIP1701
PIP1702
COP17
PIP1801
PIP1802
COP18
PIP1901
PIP1902
COP19
PIP3001
PIP3002
COP30
PIP3101
PIP3102
PIP3103
PIP3104
PIP3105
COP31
PIR501 PIR502
COR5
PIR601
PIR602 COR6
PIR701 PIR702
COR7
PIR801
PIR802 COR8
PIR901 PIR902
COR9
PIR1001
PIR1002 COR10
PIR1101 PIR1102
COR11
PIR1201 PIR1202
COR12
PIR1301 PIR1302
COR13
PIR1401 PIR1402
COR14
PIR1501 PIR1502
COR15
PIR1601 PIR1602
COR16
PIR1701 PIR1702
COR17
PIR1801 PIR1802
COR18
PIR1901 PIR1902
COR19
PIR2001 PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301
PIR2302
COR23
PIR2501 PIR2502
COR25
PIR2601 PIR2602
COR26 PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28
PIR2901 PIR2902
COR29
PIRST101
PIRST102
CORST1
PISW101 PISW102
COSW1
PISW201 PISW202
COSW2
PIU201 PIU202
PIU203
PIU204 PIU205
PIU206
COU2
PIU301
PIU302
PIU303
COU3
PIU401
PIU402
PIU403
PIU404
PIU405
PIU406
PIU407
PIU408
PIU409
PIU4010
PIU4011
PIU4012
PIU4013
PIU4014
PIU4015
PIU4016
PIU4017
PIU4018
PIU4019
PIU4020
PIU4021
PIU4022
PIU4023
PIU4024
PIU4025
PIU4026
PIU4027
PIU4028
PIU4029
PIU4030
PIU4031
PIU4032
PIU4033
PIU4034
PIU4035
PIU4036
PIU4037
PIU4038
PIU4039
PIU4040
PIU4041
PIU4042
PIU4043
PIU4044
PIU4045
PIU4046
PIU4047
PIU4048
PIU4049
PIU4050
PIU4051
PIU4052
PIU4053
PIU4054
PIU4055
PIU4056
PIU4057
PIU4058
PIU4059
PIU4060
PIU4061
PIU4062
PIU4063
PIU4064
PIU4065
PIU4066
PIU4067
PIU4068
PIU4069
PIU4070
PIU4071
PIU4072
PIU4073
PIU4074
PIU4075
PIU4076
PIU4077
PIU4078
PIU4079
PIU4080
PIU4081
PIU4082
PIU4083
PIU4084
PIU4085
PIU4086
PIU4087
PIU4088
PIU4089
PIU4090
PIU4091
PIU4092
PIU4093
PIU4094
PIU4095
PIU4096
PIU4097
PIU4098
PIU4099
PIU40100
COU4
PIR1202
PIU4032
NLADC0IN0
PIR1302
PIU4015
NLADC0IN1
PIR1402
PIU4031
NLADC0IN2
PIR1502
PIU4030
NLADC0IN3
PIR1602
PIU4029
NLADC0IN4
PIR1902
PIU4023
NLADC0IN5
PIR2102
PIU4016
NLADC0IN6
PIR2202
PIU4025
NLADC0IN7
PIR2502
PIU4034
NLADC0IN8
PIR2702
PIU4036
NLADC0IN9
PIR2802
PIU4035
NLADC0IN10
PIR2902
PIU4033
NLADC0IN11
PIP705
PIR2602
NLBOOT0 PIP702
PIR2001
NLBOOT1
PIC1002
PIC1102 PIC1201 PIC1301 PIC1501 PIC1602
PIC1802 PIC1902
PIC2002
PIC2102
PIC2202
PIC2302
PIC2402
PIC2502
PIC2602
PIC2702
PIC2802
PIC2902
PIC3002
PIC3102
PIC3202
PIC3302
PIC3402
PIC3502
PIC3602 PIC3702 PIC3802 PIC3902 PIC4002 PIC4102 PIC4202
PIC4302
PIC4402
PID1301
PIJK103
PIJK203
PIJK303
PIJK403
PIJK503
PIJK603
PIJK703
PIJK803
PIJK903
PIJK1003
PIJK1103
PIJK1203
PILED102
PILED202
PIP301
PIP302
PIP303
PIP304
PIP305
PIP502 PIP604 PIP703 PIP706
PIP3001
PIR1001
PIRST102
PISW202
PIU203 PIU206 PIU302
PIU4010
PIU4020
PIU4027
PIU4074
PIU4099
PISW101
PIU4058
NLKEY0
PISW201
PIU4059
NLKEY1
PID1402
PIU4057
NLLED1
PID1502
PIU4056
NLLED2
PIC901 PIR1002
PIU205 PIC1601
PIR501 PIU303
PIC2701 PICY102 PIR2301
PIU4012
PIC2801 PICY101 PIR2302
PIU4013
PIC3201 PIU4049
PIC3301 PIU4073
PID1302
PIL101 PIU202
PID1401 PIR902
PID1501 PIR1102
PIJK102 PIR1201
PIJK202 PIR1301
PIJK302 PIR1401
PIJK402 PIR1501
PIJK502 PIR1601
PIJK602 PIR1901
PIJK702 PIR2101
PIJK802 PIR2201
PIJK902 PIR2501
PIJK1002 PIR2701
PIJK1102 PIR2801
PIJK1202 PIR2901
PILED101 PIR601
PILED201 PIR701
PIR1702 PIU4068
PIR1802 PIU4069
PIR2601 PIU4094
PIU407
PIU4051
PIU4097
PIC1801 PIP501
PIR801 PIRST101
PIU4014
NLNREST PIP409
PIU4067
NLPA8
PIU4071
NLPA12
PIP402
PIU4077
NLPA15
PIR2002 PIU4037 NLPB2
PIU4089
NLPB3 NLTIM20CH20PWM
PIU4090 NLPB4
PIU4091 NLPB5
PIU4092
NLPB6
PIU4093 NLPB7
PIP403
PIU4078
NLPC10
PIP406
PIU4079
NLPC11
PIP404
PIU4080
NLPC12
PIU408 NLPC14
PIU409 NLPC15
PIP407
PIU4081
NLPD0
PIP405
PIU4082
NLPD1
PIP408
PIU4083
NLPD2
PIP401
PIU4088
NLPD7
PIP4010
PIU4061
NLPD14
PIU4041
NLPE10
PIU4046 NLPE15
PIP503
PIU4076 NLPA14
NLSWCLK PIP504
PIU4072 NLPA13
NLSWDIO
PIP603
PIR1801
NLUSART10RXD PIP602
PIR1701
NLUSART10TXD PIC1001 PIC1502
PIC1901
PIC2001
PIC2101
PIC2201
PIC2301
PIC2401
PIC2501
PIC2601
PIC2901
PIC3001
PIC3101
PIC3401
PIC3501
PIC3601 PIC3701 PIC3801 PIC3901 PIC4001 PIC4101 PIC4201 PIC4401
PIJK101
PIJK201
PIJK301
PIJK401
PIJK501
PIJK601
PIJK701
PIJK801
PIJK901
PIJK1001
PIJK1101
PIJK1201
PIP201
PIP202
PIP203
PIP204
PIP205
PIP505 PIP601
PIP701 PIP704
PIR502
PIR702
PIR802
PIR901
PIR1101
PISW102
PIU406
PIU4011
PIU4019
PIU4021
PIU4022
PIU4028
PIU4050
PIU4075
PIU40100
PIC1202 PIC1302
PIC4301
PIL102
PIP101
PIP102
PIP103
PIP104
PIP105
PIR602
PIU204
PIU301 PIC902 PIC1101
PIP3002 PIP3101
PIP3102
PIP3103
PIP3104
PIP3105
PIU201
PIP801
NLMOTOR0OUT0A0010060
NLMOTOR0OUT0A01
NLMOTOR0OUT0A0
PIP901
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A02
PIP1001
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A03
PIP1101
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A04
PIP1201
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A05
PIP1301
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A06
PIP802
NLMOTOR0OUT0A0010060
NLMOTOR0OUT0A01
NLMOTOR0OUT0A0
PIP902
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A02
PIP1002
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A03
PIP1102
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A04
PIP1202
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A05
PIP1302
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A06
PIP1401
NLMOTOR0OUT0B0010060
NLMOTOR0OUT0B01
NLMOTOR0OUT0B0
PIP1501
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B02
PIP1601
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B03
PIP1701
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B04
PIP1801
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B05
PIP1901
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B06
PIP1402
NLMOTOR0OUT0B0010060
NLMOTOR0OUT0B01
NLMOTOR0OUT0B0
PIP1502
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B02
PIP1602
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B03
PIP1702
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B04
PIP1802
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B05
PIP1902
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B06
PIU4096
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN1
NLPB9 NLTIM110CH10PWM
PIU4070
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN2
NLPA11
PIU4060
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN3
PIU4040
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN4
NLTIM10CH10PWM
PIU4026
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN5
PIU4047
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN6
NLPB10 NLTIM20CH30PWM
PIU402
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN1
PIU4085
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN2
PIU4063
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN3
PIU4018
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN4
PIU4039
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN5
PIU4053
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN6
NLPB14
PIU401
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP1
PIU4084
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP2
PIU4062
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP3
PIU4017
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP4
PIU4038
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP5
PIU4052
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP6
PIU405
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN1
NLTIM90CH20PWM
PIU4095
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN2 NLTIM100CH10PWM
PIU4066
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN3
NLTIM30CH40PWM
PIU4042
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN4
NLPE11 NLTIM10CH20PWM
PIU4045
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN5
NLTIM10CH40PWM
PIU4048
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN6
NLPB11 NLTIM20CH40PWM
PIU404
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN1
PIU4087
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN2 PIU4065
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN3
NLTIM30CH30PWM
PIU4098
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN4
PIU4044
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN5
NLPE13
PIU4055
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN6
PIU403
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP1
PIU4086
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP2
PIU4064
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP3
NLTIM30CH20PWM
PIU4024
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP4
PIU4043
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP5
NLPE12
PIU4054
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP6
NLPB15
Figure 3.6: Circuit schematic diagram of the MCU.
3.3.3 Motor Drive
There are two types of motor drive that are designed to actuate the motors:
• MOSFET/Gate driver IC
In the first version of motor drive, gate driver ICs produce the high-current to rapidly
switch on/off power MOSFETs in the bridge circuits. Moreover, the EL357N opto-
coupler is placed between the isolated PWM signal and input of NAND gate. Unfor-
tunately, the gate drivers are burnt as voltage exceeded their max value. Figure 3.7
illustrates the motor drive using MOSFETs and gate driver ICs.
However, it is often troublesome to build H-bridges with discrete components. As
a result, the size of circuit board and the number of components will largely increase.

38
机器狗
转 电路
++
存储模块
下载接口
用于接外部指示灯
1
2
3
71
4
U9A
74VHC08MX
自恢复保险丝印字
4
56
U5B
74VHC00MX
+24V
GND3
4
56
U9B
74VHC08MXD10
1N4148
D121N4148
VCC
C26
100nF
DA-1
DA-2
1
23
Q13NCE6075K
1
23
Q11
SUD50P06-15
+24V
R28
1MC24
1nF
1
23
Q8
SUD50P06-15
+24V
1
23
Q16NCE6075K
R29
1MC25
1nF
1
23
714
U5A
74VHC00MX
IN1_T
IN2_T
ENA_24
IN1_24
IN2_24
MOTOR_1_+ MOTOR_1_-
PIC101
PIC102
COC1 PIC201
PIC202
COC2
PIC301
PIC302
COC3 PIC401
PIC402
COC4 PIC501
PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIC801
PIC802
COC8
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10
PIC1101 PIC1102
COC11 PIC1201 PIC1202
COC12 PIC1301 PIC1302 COC13
PIC1401 PIC1402
COC14 PIC1501 PIC1502 COC15
PIC1601 PIC1602 COC16
PIC1701
PIC1702 COC17
PIC1801
PIC1802
COC18
PIC1901
PIC1902
COC19
PIC2001
PIC2002 COC20
PIC2101
PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702
COC27
PIC2801 PIC2802
COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601 PIC3602
COC36
PIC3701 PIC3702
COC37
PIC3801 PIC3802
COC38
PIC3901 PIC3902
COC39
PIC4001 PIC4002
COC40
PIC4101 PIC4102
COC41
PIC4201 PIC4202
COC42
PIC4301 PIC4302
COC43
PIC4401 PIC4402
COC44
PIC4501 PIC4502
COC45
PIC4601 PIC4602
COC46
PIC4701 PIC4702
COC47
PIC4901 PIC4902
COC49
PIC5001 PIC5002
COC50
PIC5101 PIC5102
COC51
PIC5201 PIC5202
COC52
PIC5301 PIC5302
COC53
PICN101 PICN102
PICN103
PICN104
PICN105
PICN106
COCN1
PICV101
PICV102
COCV1 PICV201
PICV202
COCV2
PID101
PID102 COD1
PID201
PID202 COD2
PID301
PID302 COD3
PID401
PID402 COD4
PID501
PID502
COD5
PID601
PID602
COD6
PID701
PID702 COD7
PID801
PID802 COD8
PID901 PID902
COD9
PID1001
PID1002
COD10
PID1101
PID1102
COD11
PID1201
PID1202 COD12
PID1301
PID1302
COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PID1601 PID1602
COD16
PID1701
PID1702
COD17
PID1801
PID1802
COD18
PID1901
PID1902 COD19
PID2001
PID2002 COD20
PID2101 PID2102
COD21
PID2201 PID2202
COD22
PID2301
PID2302
COD23
PID2401
PID2402
COD24
PID2501
PID2502
COD25
PID2601
PID2602 COD26
PID2701 PID2702
COD27
PID2801 PID2802
COD28
PID2901
PID2902
COD29
PID3001
PID3002
COD30
PID3101
PID3102 COD31
PID3201
PID3202 COD32
PID3301 PID3302
COD33
PID3401 PID3402
COD34
PID3501
PID3502
COD35 PID3601
PID3602
COD36
PID3701
PID3702 COD37
PID3801
PID3802 COD38
PID3901 PID3902
COD39
PID4001
PID4002
COD40
PID4101 PID4102
COD41
PID4201
PID4202
COD42
PID4301
PID4302 COD43
PID4401
PID4402 COD44
PID4501 PID4502
COD45
PID4601 PID4602
COD46
PID4701 PID4702
COD47
PID4801 PID4802
COD48
PID4901 PID4902
COD49
PID5001 PID5002
COD50
PID5101 PID5102
COD51
PID5201 PID5202
COD52
PID5301 PID5302
COD53
PID5401 PID5402
COD54
PID5501 PID5502
COD55
PID5601 PID5602
COD56
PIDS101
PIDS102 CODS1
PIF101
PIF102 COF1
PIFB101 PIFB102
COFB1
PIFB201 PIFB202
COFB2
PIJ001 PIJ002
COJ0
PIJ101
PIJ102
COJ1
PIJ201
PIJ202
COJ2
PIJ301
PIJ302
COJ3
PIJ401
PIJ402
COJ4
PIJ501
PIJ502
COJ5
PIJ601
PIJ602
COJ6
PIJ701
PIJ702
COJ7 PIJ801
PIJ802
COJ8
PIJ901
PIJ902
COJ9
PIJ1001
PIJ1002
COJ10
PIJ1101
PIJ1102
COJ11
PIJ1201
PIJ1202
COJ12
PIJ1301
PIJ1302
COJ13
PIJK101 PIJK102
PIJK103
COJK1
PIJK201 PIJK202
PIJK203
COJK2
PIJK301 PIJK302
PIJK303
COJK3
PIJK401 PIJK402
PIJK403
COJK4
PIJK501 PIJK502
PIJK503
COJK5
PIJK601 PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PIP101
PIP102
PIP103
PIP104
COP1
PIP201
PIP202
PIP203 PIP204
COP2
PIQ101
PIQ102
PIQ103 COQ1
PIQ201
PIQ202
PIQ203 COQ2
PIQ301
PIQ302
PIQ303 COQ3
PIQ401
PIQ402
PIQ403 COQ4
PIQ501
PIQ502
PIQ503
COQ5
PIQ601
PIQ602
PIQ603
COQ6
PIQ701
PIQ702
PIQ703 COQ7
PIQ801
PIQ802
PIQ803 COQ8
PIQ901
PIQ902
PIQ903 COQ9
PIQ1001
PIQ1002
PIQ1003 COQ10
PIQ1101
PIQ1102
PIQ1103 COQ11
PIQ1201
PIQ1202
PIQ1203
COQ12
PIQ1301
PIQ1302
PIQ1303
COQ13
PIQ1401
PIQ1402
PIQ1403 COQ14
PIQ1501
PIQ1502
PIQ1503
COQ15
PIQ1601
PIQ1602
PIQ1603
COQ16
PIQ1701
PIQ1702
PIQ1703 COQ17
PIQ1801
PIQ1802
PIQ1803
COQ18
PIQ1901
PIQ1902
PIQ1903 COQ19
PIQ2001
PIQ2002
PIQ2003 COQ20
PIQ2101
PIQ2102
PIQ2103 COQ21
PIQ2201
PIQ2202
PIQ2203 COQ22
PIQ2301
PIQ2302
PIQ2303 COQ23
PIQ2401
PIQ2402
PIQ2403 COQ24
PIQ2501
PIQ2502
PIQ2503 COQ25
PIQ2601
PIQ2602
PIQ2603 COQ26
PIQ2701
PIQ2702
PIQ2703 COQ27
PIQ2801
PIQ2802
PIQ2803 COQ28
PIQ2901
PIQ2902
PIQ2903
COQ29
PIQ3001
PIQ3002
PIQ3003 COQ30
PIQ3101
PIQ3102
PIQ3103
COQ31
PIQ3201
PIQ3202
PIQ3203
COQ32
PIQ3301
PIQ3302
PIQ3303
COQ33
PIQ3401
PIQ3402
PIQ3403
COQ34
PIQ3501
PIQ3502
PIQ3503 COQ35
PIQ3601
PIQ3602
PIQ3603 COQ36
PIQ3701
PIQ3702
PIQ3703 COQ37
PIQ3801
PIQ3802
PIQ3803
COQ38 PIQ3901
PIQ3902
PIQ3903 COQ39
PIQ4001
PIQ4002
PIQ4003 COQ40
PIQ4101
PIQ4102
PIQ4103 COQ41
PIQ4201
PIQ4202
PIQ4203
COQ42
PIQ4301
PIQ4302
PIQ4303
COQ43
PIQ4401
PIQ4402
PIQ4403
COQ44
PIQ4501
PIQ4502
PIQ4503 COQ45
PIQ4601
PIQ4602
PIQ4603
COQ46
PIQ4701
PIQ4702
PIQ4703
COQ47
PIQ4801
PIQ4802
PIQ4803
COQ48
PIQ4901
PIQ4902
PIQ4903 COQ49
PIQ5001
PIQ5002
PIQ5003 COQ50
PIQ5101
PIQ5102
PIQ5103 COQ51
PIQ5201
PIQ5202
PIQ5203 COQ52
PIQ5301
PIQ5302
PIQ5303 COQ53
PIQ5401
PIQ5402
PIQ5403 COQ54
PIQ5501
PIQ5502
PIQ5503
COQ55
PIQ5601
PIQ5602
PIQ5603
COQ56
PIQ5701
PIQ5702
PIQ5703
COQ57
PIQ5801
PIQ5802
PIQ5803 COQ58
PIQ5901
PIQ5902
PIQ5903
COQ59
PIQ6001
PIQ6002
PIQ6003
COQ60
PIQ6101
PIQ6102
PIQ6103
COQ61
PIQ6201
PIQ6202
PIQ6203 COQ62
PIQ6301
PIQ6302
PIQ6303 COQ63
PIQ6401
PIQ6402
PIQ6403 COQ64
PIQ6501
PIQ6502
PIQ6503 COQ65
PIQ6601
PIQ6602
PIQ6603 COQ66
PIQ6701
PIQ6702
PIQ6703 COQ67
PIQ6801
PIQ6802
PIQ6803 COQ68
PIQ6901
PIQ6902
PIQ6903 COQ69
PIQ7001
PIQ7002
PIQ7003 COQ70
PIQ7101
PIQ7102
PIQ7103
COQ71
PIQ7201
PIQ7202
PIQ7203
COQ72
PIQ7301
PIQ7302
PIQ7303
COQ73
PIQ7401
PIQ7402
PIQ7403
COQ74
PIQ7501
PIQ7502
PIQ7503
COQ75
PIQ7601
PIQ7602
PIQ7603 COQ76
PIQ7701
PIQ7702
PIQ7703 COQ77
PIQ7801
PIQ7802
PIQ7803 COQ78
PIQ7901
PIQ7902
PIQ7903 COQ79
PIQ8001
PIQ8002
PIQ8003 COQ80
PIQ8101
PIQ8102
PIQ8103 COQ81
PIQ8201
PIQ8202
PIQ8203 COQ82
PIQ8301
PIQ8302
PIQ8303
COQ83
PIQ8401
PIQ8402
PIQ8403
COQ84
PIQ8501
PIQ8502
PIQ8503
COQ85
PIQ8601
PIQ8602
PIQ8603
COQ86
PIQ8701
PIQ8702
PIQ8703
COQ87
PIQ8801
PIQ8802
PIQ8803
COQ88
PIQ8901
PIQ8902
PIQ8903 COQ89
PIQ9001
PIQ9002
PIQ9003
COQ90
PIR101
PIR102 COR1
PIR201 PIR202
COR2
PIR301 PIR302
COR3
PIR401 PIR402
COR4
PIR501
PIR502
COR5
PIR601
PIR602 COR6
PIR701
PIR702 COR7
PIR801
PIR802 COR8
PIR901
PIR902 COR9
PIR1001
PIR1002 COR10
PIR1101
PIR1102 COR11 PIR1201
PIR1202
COR12
PIR1301
PIR1302 COR13
PIR1401 PIR1402
COR14 PIR1501 PIR1502
COR15 PIR1601 PIR1602
COR16 PIR1701 PIR1702
COR17
PIR1801
PIR1802
COR18
PIR1901
PIR1902 COR19
PIR2001
PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301 PIR2302
COR23
PIR2401 PIR2402
COR24
PIR2501
PIR2502
COR25
PIR2601 PIR2602
COR26 PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28 PIR2901 PIR2902
COR29
PIR3001 PIR3002
COR30 PIR3101 PIR3102
COR31
PIR3201 PIR3202
COR32
PIR3301 PIR3302
COR33
PIR3401
PIR3402 COR34
PIR3501 PIR3502
COR35
PIR3601 PIR3602
COR36
PIR3701 PIR3702
COR37
PIR3801 PIR3802
COR38
PIR3901
PIR3902
COR39
PIR4001 PIR4002
COR40
PIR4101 PIR4102
COR41
PIR4201 PIR4202
COR42
PIR4301 PIR4302
COR43
PIR4401
PIR4402
COR44
PIR4501 PIR4502 COR45
PIR4601 PIR4602 COR46
PIR4701 PIR4702 COR47
PIR4801 PIR4802
COR48
PIR4901
PIR4902 COR49
PIR5001 PIR5002
COR50 PIR5101 PIR5102
COR51
PIR5201 PIR5202
COR52
PIR5301 PIR5302 COR53
PIR5401
PIR5402 COR54
PIR5501 PIR5502
COR55 PIR5601 PIR5602
COR56
PIR5701 PIR5702
COR57
PIR5801 PIR5802
COR58
PIR5901
PIR5902 COR59
PIR6001 PIR6002 COR60
PIR6101 PIR6102 COR61
PIR6201 PIR6202
COR62
PIR6301 PIR6302
COR63
PIR6401
PIR6402
COR64
PIR6501 PIR6502
COR65 PIR6601 PIR6602
COR66
PIR6701 PIR6702
COR67
PIR6801 PIR6802
COR68
PIR6901
PIR6902 COR69
PIR7001 PIR7002
COR70 PIR7101 PIR7102
COR71
PIR7201 PIR7202
COR72
PIR7301 PIR7302 COR73
PIR7401
PIR7402
COR74
PIR7501 PIR7502
COR75 PIR7601 PIR7602
COR76
PIR7701 PIR7702
COR77
PIR7801 PIR7802
COR78 PIR7901 PIR7902
COR79
PIR8001 PIR8002
COR80
PIR8101 PIR8102 COR81 PIR8201 PIR8202 COR82
PIR8301
PIR8302 COR83
PIR8401 PIR8402
COR84
PIR8501 PIR8502
COR85
PIR8601 PIR8602
COR86
PIR8701 PIR8702 COR87
PIR8801
PIR8802
COR88
PIR8901 PIR8902
COR89 PIR9001 PIR9002
COR90
PIR9101 PIR9102
COR91
PIR9201 PIR9202
COR92
PIR9301
PIR9302 COR93
PIR9401 PIR9402 COR94
PIR9501 PIR9502 COR95
PIR9601 PIR9602
COR96
PIR9701 PIR9702
COR97
PIR9801
PIR9802
COR98
PIR9901 PIR9902
COR99 PIR10001 PIR10002
COR100
PIR10101 PIR10102
COR101 PIR10201 PIR10202
COR102
PIR10301 PIR10302
COR103
PIR10401 PIR10402 COR104
PIR10501 PIR10502 COR105
PIR10601 PIR10602
COR106
PIR10701
PIR10702 COR107
PIR10801 PIR10802
COR108 PIR10901 PIR10902
COR109
PIR11001 PIR11002 COR110
PIR11101 PIR11102
COR111
PIR11201
PIR11202 COR112
PIR11301 PIR11302
COR113
PIR11401 PIR11402
COR114
PIR11501 PIR11502
COR115
PIR11601 PIR11602
COR116
PIR11701
PIR11702
COR117
PIR11801 PIR11802
COR118 PIR11901 PIR11902
COR119
PIR12001 PIR12002 COR120
PIR12101 PIR12102
COR121
PIR12201
PIR12202 COR122
PIR12301 PIR12302
COR123 PIR12401 PIR12402
COR124
PIR12501 PIR12502
COR125
PIR12601 PIR12602 COR126
PIR12701
PIR12702 COR127
PIR12801 PIR12802
COR128
PIR12901 PIR12902
COR129
PIR13001 PIR13002
COR130
PIR13101 PIR13102
COR131
PIR13201 PIR13202
COR132
PIR13301 PIR13302
COR133
PIR13401
PIR13402
COR134
PIR13501 PIR13502
COR135 PIR13601 PIR13602
COR136
PIR13701 PIR13702
COR137 PIR13801 PIR13802
COR138
PIR13901 PIR13902 COR139
PIR14001 PIR14002
COR140
PIR14101
PIR14102 COR141
PIR14201 PIR14202
COR142 PIR14301 PIR14302
COR143
PIR14401 PIR14402
COR144
PIR14501 PIR14502 COR145
PIR14601
PIR14602
COR146
PIR14701 PIR14702
COR147 PIR14801 PIR14802
COR148
PIR14901 PIR14902 COR149
PIR15001 PIR15002
COR150
PIR15101
PIR15102 COR151
PIR15201 PIR15202
COR152 PIR15301 PIR15302
COR153
PIR15401 PIR15402
COR154
PIR15501 PIR15502 COR155
PIR15601
PIR15602 COR156
PIR15701 PIR15702
COR157
PIR15801 PIR15802
COR158
PIR15901 PIR15902
COR159
PIR16001 PIR16002
COR160
PIR16101
PIR16102
COR161
PIR16201 PIR16202
COR162 PIR16301 PIR16302
COR163
PIR16401 PIR16402
COR164
PIR16501 PIR16502
COR165
PIR16601
PIR16602 COR166
PIR16701 PIR16702 COR167 PIR16801 PIR16802 COR168
PIR16901 PIR16902
COR169
PIR17001 PIR17002
COR170
PIR17101
PIR17102
COR171
PIR17201 PIR17202 COR172
PIR17301 PIR17302 COR173
PIR17401 PIR17402 COR174
PIR17501 PIR17502 COR175
PIR17601 PIR17602
COR176
PIR17701 PIR17702
COR177
PIR17801 PIR17802
COR178
PIR17901 PIR17902 COR179
PIR18001
PIR18002
COR180
PIR18101 PIR18102
COR181 PIR18201 PIR18202
COR182
PIR18301 PIR18302
COR183
PIR18401 PIR18402
COR184
PIR18501
PIR18502 COR185
PIR18601 PIR18602
COR186 PIR18701 PIR18702
COR187
PIR18801 PIR18802
COR188
PIR18901 PIR18902 COR189
PIR19001
PIR19002 COR190
PIR19101 PIR19102
COR191 PIR19201 PIR19202
COR192
PIR19301 PIR19302
COR193
PIR19401 PIR19402
COR194
PIR19501
PIR19502 COR195
PIR19601 PIR19602
COR196 PIR19701 PIR19702
COR197
PIR19801 PIR19802
COR198
PIR19901 PIR19902
COR199
PIR20001 PIR20002 COR200
PIR20101 PIR20102 COR201
PIR20201 PIR20202 COR202
PIR20301 PIR20302 COR203
PIR20401
PIR20402 COR204
PIR20501 PIR20502
COR205 PIR20601 PIR20602
COR206
PIR20701 PIR20702
COR207
PIR20801 PIR20802
COR208
PIR20901
PIR20902
COR209
PIR21001 PIR21002 COR210 PIR21101 PIR21102 COR211
PIR21201 PIR21202
COR212
PIR21301 PIR21302
COR213
PIR21401
PIR21402
COR214
PIR21501 PIR21502
COR215 PIR21601 PIR21602
COR216
PIR21701 PIR21702
COR217
PIR21801 PIR21802 COR218
PIR21901
PIR21902 COR219
PIR22001 PIR22002 COR220
PIR22101 PIR22102 COR221
PIR22201 PIR22202
COR222
PIR22301 PIR22302
COR223
PIR22401
PIR22402 COR224
PIR22501 PIR22502 COR225
PIR22601 PIR22602
COR226 PIR22701 PIR22702
COR227
PIR22801 PIR22802 COR228 PIR22901
PIR22902
COR229
PIR23001
PIR23002
COR230
PIR23101
PIR23102
COR231
PIR23201
PIR23202 COR232
PIR23301 PIR23302
COR233
PIR23401 PIR23402
COR234 PIR23501 PIR23502
COR235
PIR23601 PIR23602
COR236
PIR23701 PIR23702
COR237
PIR23801 PIR23802 COR238
PIR23901
PIR23902 COR239
PIR24001 PIR24002 COR240 PIR24101 PIR24102 COR241
PIR24201
PIR24202
COR242
PIR24301
PIR24302
COR243
PIR24401
PIR24402
COR244
PIR24501 PIR24502
COR245
PIR24601 PIR24602
COR246
PIR24701 PIR24702
COR247 PIR24801 PIR24802
COR248
PIR24901 PIR24902
COR249
PIR25001 PIR25002 COR250
PIR25101 PIR25102 COR251
PIR25201
PIR25202
COR252
PIR25301 PIR25302
COR253
PIR25401
PIR25402
COR254
PIR25501
PIR25502
COR255
PIR25601
PIR25602 COR256
PIR25701 PIR25702
COR257
PIR25801 PIR25802
COR258
PIR25901 PIR25902
COR259
PIR26001 PIR26002 COR260
PIS101 PIS102
COS1
PIU101 PIU102
PIU103
PIU104 PIU105
PIU106
COU1
PIU2023
PIU2024
PIU2025
PIU2026
PIU2029
PIU2030
PIU2031 PIU2032
PIU2035
PIU2036
PIU2037
PIU2047
PIU2048
PIU2051
PIU2052 PIU2053
PIU2054
PIU2067
PIU2068
PIU2069
PIU2070
PIU2071
PIU2072
PIU2076
PIU2077
PIU2089
PIU2090 PIU2091
PIU2092
PIU2093
PIU2095
PIU2096
COU2A
PIU207
PIU208
PIU209
PIU2015
PIU2016
PIU2017
PIU2018
PIU2033
PIU2034
PIU2055
PIU2056
PIU2057
PIU2058
PIU2059 PIU2060
PIU2061
PIU2062
PIU2063
PIU2064
PIU2065
PIU2066
PIU2078
PIU2079
PIU2080
PIU2081
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
COU2B
PIU201
PIU202
PIU203
PIU204
PIU205 PIU2038
PIU2039
PIU2040
PIU2041
PIU2042
PIU2043
PIU2044
PIU2045
PIU2046
PIU2097
PIU2098
COU2C
PIU2012
PIU2013 PIU2014
PIU2049
PIU2073
PIU2094
COU2D
PIU206
PIU2010
PIU2011
PIU2019
PIU2020
PIU2021
PIU2022
PIU2027
PIU2028
PIU2050
PIU2074 PIU2075
PIU2099 PIU20100
COU2E
PIU301
PIU302
PIU303
PIU304 PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
PIU403 COU4
PIU501
PIU502
PIU503
PIU507
PIU5014 COU5A
PIU504
PIU505
PIU506
COU5B
PIU5011
PIU5012
PIU5013
COU5C
PIU508
PIU509
PIU5010
COU5D
PIU601
PIU602 PIU603
PIU604
COU6
PIU701
PIU702 PIU703
PIU704
COU7
PIU801
PIU802 PIU803
PIU804
COU8
PIU901
PIU902
PIU903
PIU907
PIU9014 COU9A
PIU904
PIU905 PIU906
COU9B
PIU9011
PIU9012
PIU9013
COU9C
PIU908 PIU909
PIU9010
COU9D
PIU1001
PIU1002 PIU1003
PIU1004
COU10
PIU1101
PIU1102 PIU1103
PIU1104
COU11
PIU1201
PIU1202 PIU1203
PIU1204
COU12
PIU1301
PIU1302 PIU1303
PIU1304
COU13
PIU1401
PIU1402 PIU1403
PIU1404
COU14
PIU1501
PIU1502 PIU1503
PIU1504
COU15
PIU1601
PIU1602
PIU1603
PIU1607
PIU16014 COU16A
PIU1604
PIU1605
PIU1606
COU16B
PIU16011
PIU16012
PIU16013
COU16C
PIU1608
PIU1609
PIU16010
COU16D
PIU1701
PIU1702 PIU1703
PIU1704
COU17
PIU1801
PIU1802 PIU1803
PIU1804
COU18
PIU1901
PIU1902 PIU1903
PIU1904
COU19
PIU2001
PIU2002
PIU2003
PIU2007
PIU20014 COU20A
PIU2004
PIU2005
PIU2006
COU20B
PIU20011
PIU20012
PIU20013
COU20C
PIU2008
PIU2009
PIU20010
COU20D
PIU2101
PIU2102 PIU2103
PIU2104
COU21
PIU2201
PIU2202
PIU2203
PIU2207
PIU22014 COU22A
PIU2204
PIU2205
PIU2206
COU22B
PIU22011
PIU22012
PIU22013
COU22C
PIU2208
PIU2209
PIU22010
COU22D
PIU2301
PIU2302 PIU2303
PIU2304
COU23
PIU2401
PIU2402 PIU2403
PIU2404
COU24
PIU2501
PIU2502 PIU2503
PIU2504
COU25
PIU2601
PIU2602
PIU2603
PIU2607
PIU26014 COU26A
PIU2604
PIU2605 PIU2606
COU26B
PIU26011
PIU26012
PIU26013
COU26C
PIU2608
PIU2609
PIU26010
COU26D
PIU2701
PIU2702 PIU2703
PIU2704
COU27
PIU2801
PIU2802 PIU2803
PIU2804
COU28
PIU2901
PIU2902
PIU2903
PIU2907
PIU29014 COU29A
PIU2904
PIU2905
PIU2906
COU29B
PIU29011
PIU29012
PIU29013
COU29C
PIU2908 PIU2909
PIU29010
COU29D
PIU3001
PIU3002 PIU3003
PIU3004
COU30
PIU3101
PIU3102 PIU3103
PIU3104
COU31
PIU3201
PIU3202 PIU3203
PIU3204
COU32
PIU3301
PIU3302
PIU3303
PIU3307
PIU33014 COU33A
PIU3304
PIU3305
PIU3306
COU33B
PIU33011
PIU33012
PIU33013
COU33C
PIU3308
PIU3309
PIU33010
COU33D
PIU3401
PIU3402 PIU3403
PIU3404
COU34
PIU3501
PIU3502 PIU3503
PIU3504
COU35
PIU3601
PIU3602 PIU3603
PIU3604
COU36
PIU3701
PIU3702 PIU3703
PIU3704
COU37
PIU3801
PIU3802 PIU3803
PIU3804
COU38
PIU3901
PIU3902
PIU3903
PIU3907
PIU39014 COU39A
PIU3904
PIU3905
PIU3906
COU39B
PIU39011
PIU39012
PIU39013
COU39C
PIU3908
PIU3909
PIU39010
COU39D
PIU4001
PIU4002 PIU4003
PIU4004
COU40
PIU4101
PIU4102 PIU4103
PIU4104
COU41 PIU4201
PIU4202
PIU4203
PIU4207
PIU42014 COU42A
PIU4204
PIU4205
PIU4206
COU42B
PIU42011
PIU42012
PIU42013
COU42C
PIU4208
PIU4209
PIU42010
COU42D
PIU4301
PIU4302 PIU4303
PIU4304
COU43
PIU4401
PIU4402 PIU4403
PIU4404
COU44
PIU4501
PIU4502 PIU4503
PIU4504
COU45
PIU4601
PIU4602
PIU4603
PIU4607
PIU46014 COU46A
PIU4604
PIU4605
PIU4606
COU46B
PIU46011
PIU46012
PIU46013
COU46C
PIU4608
PIU4609
PIU46010
COU46D
PIU4701
PIU4702 PIU4703
PIU4704
COU47
PIU4801
PIU4802 PIU4803
PIU4804
COU48
PIU4901
PIU4902
PIU4903
PIU4907
PIU49014 COU49A
PIU4904
PIU4905
PIU4906
COU49B
PIU49011
PIU49012
PIU49013
COU49C
PIU4908
PIU4909
PIU49010 COU49D
PIU5001
PIU5002 PIU5003
PIU5004
COU50
PIU5101
PIU5102 PIU5103
PIU5104
COU51
PIU5201
PIU5202 PIU5203
PIU5204
COU52
PIU5301
PIU5302
PIU5303
PIU5307
PIU53014 COU53A
PIU5304
PIU5305
PIU5306
COU53B
PIU53011
PIU53012
PIU53013
COU53C
PIU5308
PIU5309
PIU53010
COU53D
PIU5401
PIU5402
PIU5403
PIU5407
PIU54014 COU54A
PIU5404
PIU5405
PIU5406
COU54B
PIU54011
PIU54012
PIU54013
COU54C
PIU5408
PIU5409
PIU54010
COU54D
PIU5501
PIU5502
PIU5503
PIU5507
PIU55014 COU55A
PIU5504
PIU5505
PIU5506
COU55B
PIU55011
PIU55012
PIU55013
COU55C
PIU5508
PIU5509
PIU55010
COU55D
PIV101
PIV102 PIV103
COV1
PIY101 PIY102
COY1
PIC201
PIC1101 PIC1201 PIC1301 PIC1401 PIC1501 PIC1601
PICN101
PICV201
PIJK101 PIJK201 PIJK301 PIJK401 PIJK501 PIJK601
PIJK701 PIJK801 PIJK901 PIJK1001 PIJK1101 PIJK1201
PIP101
PIP201
PIR102
PIR502
PIR602 PIR702
PIR1201 PIR1302
PIR2301
PIR3201
PIR3701
PIR4201
PIR4701
PIR5201
PIR5701
PIR6201
PIR6701
PIR7201
PIR7701
PIR8601
PIR9101
PIR9601
PIR10301
PIR11001
PIR11501
PIR12001
PIR12501
PIR13001
PIR13901
PIR14401
PIR14901
PIR15401
PIR15901
PIR16401
PIR16901
PIR17801
PIR18301
PIR18801
PIR19301
PIR19801
PIR20701
PIR21201
PIR21701
PIR22201
PIU206
PIU2011
PIU2019
PIU2021
PIU2022
PIU2028
PIU2050
PIU2075
PIU20100
PIU308
PIV102
PIC101
PIC301 PIC401
PICV101
PIL102
PIU104 PIV103
PIC1702 PIC1801
PIC1901
PID302 PID402
PID502 PID602
PIF102
PIJ1301
PIQ703
PIQ803
PIQ903
PIQ1103
PIQ2403 PIQ2503
PIQ2703 PIQ2803
PIQ3603 PIQ3703
PIQ3903 PIQ4003
PIQ4903
PIQ5103 PIQ5203
PIQ5403
PIQ6503 PIQ6603
PIQ6803 PIQ6903
PIQ7703
PIQ7903
PIQ8003
PIQ8103
PIR1801
PIR1902
PIR2102
PIR3002
PIR3502
PIR4002
PIR4502
PIR5002
PIR5502
PIR6002
PIR6502
PIR7002
PIR7502
PIR8402
PIR8902
PIR9402
PIR10102
PIR10802
PIR11302
PIR11802
PIR12302
PIR12802
PIR13702
PIR14202
PIR14702
PIR15202
PIR15702
PIR16202
PIR16702
PIR17602
PIR18102
PIR18602
PIR19102
PIR19602
PIR20502
PIR21002
PIR21502
PIR22002
PIU5014
PIU16014
PIU22014
PIU29014
PIU39014
PIU46014
PIC501 PIJ001
PIU101
PIC2001
PIFB102
PIU403
PIR402 PIU2094 NLBOOT0
PID4601
PIR22602
PIU902
PIU904
PIU5301
PIU5302
NLDA01
PID1002
PID1202
PIR22601 PIR23001
NLDA02
PID4701
PIR22702
PIU9010
PIU9013
PIU5304
PIU5305
NLDB01
PID1102 PID1302
PIR22701 PIR23102
NLDB02
PID4801
PIR22802
PIU2002
PIU2005
PIU53012
PIU53013
NLDC01
PID1702
PID1902
PIR22801
PIR23202
NLDC02
PID4501
PIR22502
PIU2009
PIU20013
PIU5309
PIU53010
NLDD1
PID1802 PID2002
PIR22501 PIR22901
NLDD2
PID5101
PIR24002
PIU2602
PIU2604
PIU5401
PIU5402
NLDE1
PID2502 PID2602
PIR24001
PIR24302
NLDE2
PID5201
PIR24102
PIU26010
PIU26013
PIU5404
PIU5405
NLDF1
PID2302 PID2402
PIR24101
PIR24402
NLDF2
PID5001
PIR23802
PIU3302
PIU3305
PIU54012
PIU54013
NLDG1
PID3002
PID3202
PIR23801
PIR24201
NLDG2
PIC102 PIC202 PIC302 PIC402 PIC502
PIC601
PIC701
PIC801 PIC901 PIC1001
PIC1102 PIC1202 PIC1302 PIC1402 PIC1502 PIC1602
PICN106
PICV102 PICV202 PID101
PID202
PIJ002
PIJK103 PIJK203 PIJK303 PIJK403 PIJK503 PIJK603
PIJK703 PIJK803 PIJK903 PIJK1003 PIJK1103 PIJK1203
PIP104
PIP203
PIQ102 PIQ202 PIQ302 PIQ402
PIR202
PIR301
PIR401
PIS101
PIU103
PIU105
PIU106
PIU2010
PIU2020
PIU2027
PIU2074
PIU2099
PIU301
PIU302
PIU303
PIU304
PIU307
PIV101
PID4901
PIR23702
PIU33010
PIU33013
PIU5409
PIU54010
NLDH1
PID2902 PID3102
PIR23701
PIR23902
NLDH2
PID5601
PIR25302
PIU4202
PIU4205
PIU5501
PIU5502
NLDI1
PID3502 PID3702
PIR25301
PIR25602
NLDI2
PID5401
PIR25002
PIU4209
PIU42013
PIU5504
PIU5505
NLDJ1
PID3602 PID3802
PIR25001 PIR25401
NLDJ2
PID5501
PIR25102
PIU4902
PIU4904
PIU55012
PIU55013
NLDK1
PID4202 PID4402
PIR25101
PIR25502
NLDK2
PID5301
PIR24902
PIU49010
PIU49013
PIU5509
PIU55010
NLDL1
PID4002 PID4302
PIR24901 PIR25202
NLDL2
PIU2051
PIU602
NLENA
PIR2202
PIU502
PIU505
NLENA024
PID902 PIR2402
PIR23401
NLENA0T
PIU2054
PIU1002
NLENB
PIR4102
PIU5010
PIU5013
NLENB024
PID1402 PIR4302
PIR23501
NLENB0T
PIU2057
PIU1302
NLENC
PIR5602
PIU1602
PIU1605
NLENC024
PID1502 PIR5802
PIR23601
NLENC0T
PIU2060
PIU1702
NLEND
PIR7102
PIU1609
PIU16012
NLEND024
PID1602 PIR7302
PIR23301 NLEND0T
PIU2063
PIU2102 NLENE
PIR9002
PIU2201
PIU2204
NLENE024 PID2102 PIR9202
PIR24701
NLENE0T
PIU2066
PIU2502 NLENF
PIR10902
PIU2209
PIU22012
NLENF024
PID2202 PIR11102
PIR24801
NLENF0T
PIU2048
PIU3002 NLENG
PIR12402
PIU2902
PIU2905
NLENG024
PID2702 PIR12602
PIR24601
NLENG0T
PIU2045
PIU3402 NLENH
PIR14302
PIU29010
PIU29013
NLENH024
PID2802 PIR14502
PIR24501
NLENH0T
PIU2042
PIU3702
NLENI
PIR15802
PIU3902
PIU3905
NLENI024
PID3302 PIR16002
PIR26001 NLENI0T
PIU205
PIU4102 NLENJ
PIR17702
PIU3909
PIU39012
NLENJ024
PID3402 PIR17902
PIR25801 NLENJ0T
PIU202
PIU4502 NLENK
PIR19202
PIU4601
PIU4604
NLENK024
PID3902 PIR19402
PIR25901
NLENK0T
PIU2097
PIU5002
NLENL
PIR21102
PIU4609
PIU46012
NLENL024
PID4102 PIR21302
PIR25701 NLENL0T
PIC1902
PIC2102
PIC2202 PIC2302
PIC2402 PIC2502
PIC2601
PIC2702 PIC2802
PIC2902 PIC3002
PIC3101
PIC3302 PIC3402
PIC3502 PIC3602
PIC3701
PIC3802 PIC3902
PIC4002 PIC4102
PIC4201
PIC4302 PIC4402 PIC4502 PIC4602
PIC4701
PIC4902 PIC5002 PIC5102 PIC5202
PIC5301
PID501 PID601
PID701
PID801
PIDS102
PIFB202
PIJ1302
PIQ603
PIQ1002
PIQ1202
PIQ1303 PIQ1402
PIQ1503
PIQ1603
PIQ1702 PIQ1803
PIQ1902
PIQ2002
PIQ2102
PIQ2202
PIQ2302
PIQ2602
PIQ2902
PIQ3002
PIQ3103 PIQ3203
PIQ3303
PIQ3403
PIQ3502
PIQ3802
PIQ4102
PIQ4203
PIQ4302 PIQ4403
PIQ4502
PIQ4603
PIQ4703
PIQ4802
PIQ5002
PIQ5302
PIQ5502
PIQ5603 PIQ5703
PIQ5802
PIQ5903 PIQ6003
PIQ6102
PIQ6202
PIQ6302
PIQ6402
PIQ6702
PIQ7002
PIQ7103 PIQ7203
PIQ7302
PIQ7403 PIQ7503
PIQ7602
PIQ7802
PIQ8202
PIQ8302 PIQ8403
PIQ8503
PIQ8602
PIQ8703
PIQ8803
PIQ8902
PIQ9002
PIR201
PIR2002
PIR2501 PIR2602 PIR2702
PIR2802 PIR2902
PIR3401
PIR3901
PIR4401
PIR4901
PIR5401
PIR5901
PIR6401
PIR6901
PIR7401
PIR7802 PIR7902
PIR8102 PIR8202
PIR8301
PIR8801
PIR9301
PIR9801 PIR9902 PIR10002
PIR10402 PIR10502
PIR10701
PIR11201
PIR11701
PIR12201
PIR12701
PIR13102 PIR13202
PIR13401
PIR13502 PIR13602
PIR14101
PIR14601
PIR15101
PIR15601
PIR16101
PIR16601
PIR17101
PIR17202 PIR17302 PIR17402 PIR17502
PIR18001
PIR18501
PIR19001
PIR19501
PIR20002 PIR20102 PIR20202 PIR20302
PIR20401
PIR20901
PIR21401
PIR21901
PIR22401
PIR22902
PIR23002 PIR23101
PIR23201
PIR23901
PIR24202
PIR24301 PIR24401
PIR25201
PIR25402
PIR25501
PIR25601
PIU907
PIU2007
PIU2607
PIU3307
PIU4207
PIU4907
PIU5307
PIU5407
PIU5507
PIC2002
PIFB201 PIU401
PIC1701 PIC1802
PID401
PIQ602
PIU507
PIU1607
PIU2207
PIU2907
PIU3907
PIU4607
PIU2052
PIU702
NLIN1
PIR3102
PIU501
NLIN1024
PID1201
PIR3302
PIR3402 PIU703
PIU901 NLIN10T
PIU2053
PIU802
NLIN2
PIR3602
PIU504
NLIN2024
PID1001
PIR3802 PIR3902 PIU803
PIU905 NLIN20T
PIU2055
PIU1102
NLIN3
PIR4602
PIU509 NLIN3024
PID1301
PIR4801
PIR4902
PIU909
PIU1103
NLIN30T
PIU2056
PIU1202
NLIN4
PIR5102
PIU5012 NLIN4024
PID1101
PIR5301
PIR5402
PIU9012
PIU1203
NLIN40T
PIU2058
PIU1402
NLIN5
PIR6102
PIU1601
NLIN5024
PID1901
PIR6301 PIR6402 PIU1403
PIU2001 NLIN50T
PIU2059
PIU1502
NLIN6
PIR6602
PIU1604
NLIN6024
PID1701
PIR6801
PIR6902 PIU1503
PIU2004 NLIN60T
PIU2061
PIU1802
NLIN7
PIR7602
PIU16010 NLIN7024
PID2001 PIR8002
PIR8302 PIU1803
PIU20010
NLIN70T
PIU2062
PIU1902
NLIN8
PIR8502
PIU16013 NLIN8024
PID1801
PIR8702 PIR8802
PIU1903
PIU20012 NLIN80T
PIU2064
PIU2302
NLIN9
PIR9502
PIU2202
NLIN9024
PID2601
PIR9701 PIR9802 PIU2303
PIU2601 NLIN90T
PIU2065
PIU2402 NLIN10
PIR10202
PIU2205
NLIN10024
PID2501
PIR10601
PIR10702 PIU2403
PIU2605 NLIN100T
PIU2070
PIU2702
NLIN11
PIR11402
PIU22010 NLIN11024
PID2401
PIR11601 PIR11702
PIU2609
PIU2703
NLIN110T
PIU2071
PIU2802 NLIN12
PIR11902
PIU22013 NLIN12024
PID2301
PIR12101
PIR12202
PIU26012
PIU2803
NLIN120T
PIU2047
PIU3102
NLIN13
PIR12902
PIU2901
NLIN13024
PID3201
PIR13302 PIR13402 PIU3103
PIU3301
NLIN130T
PIU2046
PIU3202
NLIN14
PIR13802
PIU2904
NLIN14024
PID3001
PIR14002
PIR14102 PIU3203
PIU3304
NLIN140T
PIU2044
PIU3502
NLIN15
PIR14802
PIU2909 NLIN15024
PID3101 PIR15001
PIR15102 PIU33012 PIU3503
NLIN150T
PIU2043
PIU3602 NLIN16
PIR15302
PIU29012 NLIN16024
PID2901
PIR15501
PIR15602
PIU3309
PIU3603
NLIN160T
PIU2041
PIU3802 NLIN17
PIR16302
PIU3901 NLIN17024
PID3701
PIR16501
PIR16602 PIU3803
PIU4201 NLIN170T
PIU2040
PIU4002
NLIN18
PIR16802
PIU3904
NLIN18024
PID3501
PIR17001 PIR17102 PIU4003
PIU4204 NLIN180T
PIU204
PIU4302 NLIN19
PIR18202
PIU39010 NLIN19024
PID3801
PIR18402
PIR18502
PIU42010
PIU4303
NLIN190T
PIU203
PIU4402 NLIN20
PIR18702
PIU39013
NLIN20024
PID3601
PIR18902
PIR19002
PIU42012
PIU4403
NLIN200T
PIU201
PIU4702 NLIN21
PIR19702
PIU4602
NLIN21024
PID4401
PIR19901
PIR20402 PIU4703
PIU4901 NLIN210T
PIU2098
PIU4802
NLIN22
PIR20602
PIU4605
NLIN22024
PID4201
PIR20801 PIR20902 PIU4803
PIU4905 NLIN220T
PIU2096
PIU5102 NLIN23
PIR21602
PIU46010 NLIN23024
PID4301
PIR21801 PIR21902
PIU4909
PIU5103
NLIN230T
PIU2095
PIU5202
NLIN24
PIR22102
PIU46013 NLIN24024
PID4001
PIR22301
PIR22402
PIU49012
PIU5203
NLIN240T
PIR1401
PIU2081
NLLED1
PICN102
PIR1002
NLLED10OUT
PIR1501
PIU2080
NLLED2
PICN103
PIR1102
NLLED20OUT
PIR1601
PIU2079
NLLED3 PICN104
PIR802
NLLED30OUT
PIR1701
PIU2078
NLLED4 PICN105
PIR902
NLLED40OUT
PIJK102
PIU2023
NLM1
PIJK202
PIU2024
NLM2
PIJK302
PIU2025
NLM3
PIJK402
PIU2026 NLM4
PIJK502
PIU2029 NLM5
PIJK602
PIU2030
NLM6
PIJK702
PIU2031 NLM7
PIJK802
PIU2032 NLM8
PIJK902
PIU2035 NLM9
PIJK1002
PIU2036 NLM10
PIJK1102
PIU2015
NLM11 PIJK1202
PIU2016
NLM12
PIC2401
PIJ101
PIQ1102
PIQ1302
PIR2801
NLMOTOR0100
PIC2501
PIJ102
PIQ802
PIQ1602
PIR2901
NLMOTOR0100
PIC2201
PIJ201
PIQ902
PIQ1502
PIR2601
NLMOTOR0200
PIC2301
PIJ202
PIQ702
PIQ1802
PIR2701
NLMOTOR0200
PIC2701
PIJ301
PIQ2702
PIQ3102
PIR7801
NLMOTOR0300
PIC2801
PIJ302
PIQ2402
PIQ3302
PIR7901
NLMOTOR0300
PIC2901
PIJ401
PIQ2802
PIQ3202
PIR8101
NLMOTOR0400
PIC3001
PIJ402
PIQ2502
PIQ3402
PIR8201
NLMOTOR0400
PIC3501
PIJ501
PIQ3902
PIQ4402
PIR10401
NLMOTOR0500
PIC3601
PIJ502
PIQ3602
PIQ4702
PIR10501
NLMOTOR0500
PIC3301
PIJ601
PIQ4002
PIQ4202
PIR9901
NLMOTOR0600
PIC3401
PIJ602
PIQ3702
PIQ4602
PIR10001
NLMOTOR0600
PIC4001
PIJ701
PIQ5402
PIQ5702
PIR13501
NLMOTOR0700
PIC4101
PIJ702
PIQ5102
PIQ6002
PIR13601
NLMOTOR0700
PIC3801
PIJ801
PIQ5202
PIQ5602
PIR13101
NLMOTOR0800
PIC3901
PIJ802 PIQ4902
PIQ5902
PIR13201
NLMOTOR0800
PIC4301
PIJ901
PIQ6802
PIQ7102
PIR17201
NLMOTOR0900
PIC4401
PIJ902
PIQ6502
PIQ7402
PIR17301
NLMOTOR0900
PIC4501
PIJ1001
PIQ6902
PIQ7202
PIR17401
NLMOTOR01000
PIC4601
PIJ1002
PIQ6602
PIQ7502
PIR17501
NLMOTOR01000
PIC4901
PIJ1101
PIQ8002
PIQ8502
PIR20001
NLMOTOR01100
PIC5001
PIJ1102
PIQ7702
PIQ8802
PIR20101
NLMOTOR01100
PIC5101
PIJ1201
PIQ8102
PIQ8402
PIR20201
NLMOTOR01200
PIC5201
PIJ1202
PIQ7902
PIQ8702
PIR20301
NLMOTOR01200
PIC602 PIU2049
PIC702 PIU2073
PID102
PIL101 PIU102
PID201 PIR101
PID301
PIQ601 PIR2001
PID702 PIQ501
PIR1901
PID901 PIR2502 PIU603
PID1401 PIR4402 PIU1003
PID1501
PIR5902 PIU1303
PID1601
PIR7402 PIU1703
PID2101
PIR9302 PIU2103
PID2201
PIR11202 PIU2503
PID2701
PIR12702 PIU3003
PID2801 PIR14602
PIU3403
PID3301 PIR16102 PIU3703
PID3401 PIR18002
PIU4103
PID3901
PIR19502 PIU4503
PID4101 PIR21402 PIU5003
PIDS101 PIR1802
PIF101
PIQ502
PIQ101 PIR1402
PIQ103 PIR1001
PIQ201 PIR1502
PIQ203 PIR1101
PIQ301 PIR1602
PIQ303
PIR801
PIQ401 PIR1702
PIQ403
PIR901
PIQ701 PIU508
PIQ801 PIU503
PIQ901 PIU5011
PIQ1001 PIR2401
PIQ1003 PIR2101 PIR2201
PIQ1101 PIU506
PIQ1201 PIR3301
PIQ1203 PIR3001 PIR3101
PIQ1301 PIU906 PIQ1401 PIR3801
PIQ1403 PIR3501 PIR3601
PIQ1601 PIU903
PIQ1701 PIR4301
PIQ1703 PIR4001 PIR4101
PIQ1801 PIU908
PIQ1901 PIR4802
PIQ1903 PIR4501 PIR4601
PIQ2001 PIR5302
PIQ2003 PIR5001 PIR5101
PIQ2101 PIR5801
PIQ2103 PIR5501 PIR5601
PIQ2201 PIR6302
PIQ2203 PIR6001 PIR6101
PIQ2301 PIR6802
PIQ2303 PIR6501 PIR6601
PIQ2401 PIU1603
PIQ2501 PIU1608
PIQ2601 PIR7301
PIQ2603 PIR7001 PIR7101
PIQ2701 PIU1606
PIQ2801 PIU16011
PIQ2901 PIR8001
PIQ2903 PIR7501 PIR7601
PIQ3001 PIR8701
PIQ3003 PIR8401 PIR8501
PIQ3101 PIU2006
PIQ3201 PIU20011
PIQ3301 PIU2003
PIQ3401 PIU2008
PIQ3501 PIR9201
PIQ3503 PIR8901 PIR9001
PIQ3601 PIU2203 PIQ3701 PIU2208
PIQ3801 PIR9702
PIQ3803 PIR9401 PIR9501
PIQ3901 PIU2206 PIQ4001 PIU22011
PIQ4101 PIR10602
PIQ4103 PIR10101 PIR10201
PIQ4201 PIU26011
PIQ4301 PIR11101
PIQ4303 PIR10801 PIR10901
PIQ4401 PIU2606
PIQ4501 PIR11602
PIQ4503 PIR11301 PIR11401
PIQ4601 PIU2608
PIQ4701 PIU2603
PIQ4801 PIR12102
PIQ4803 PIR11801 PIR11901
PIQ4901 PIU2908 PIQ5001 PIR12601
PIQ5003 PIR12301 PIR12401
PIQ5101 PIU2903 PIQ5201 PIU29011
PIQ5301 PIR13301
PIQ5303 PIR12801 PIR12901
PIQ5401 PIU2906
PIQ5501 PIR14001
PIQ5503 PIR13701 PIR13801
PIQ5601 PIU3308
PIQ5701 PIU3306
PIQ5801 PIR14501
PIQ5803 PIR14201 PIR14301
PIQ5901 PIU33011
PIQ6001 PIU3303
PIQ6101 PIR15002
PIQ6103 PIR14701 PIR14801
PIQ6201 PIR15502
PIQ6203 PIR15201 PIR15301
PIQ6301 PIR16001
PIQ6303 PIR15701 PIR15801
PIQ6401 PIR16502
PIQ6403 PIR16201 PIR16301
PIQ6501 PIU3903 PIQ6601 PIU3908
PIQ6701 PIR17002
PIQ6703 PIR16701 PIR16801
PIQ6801 PIU3906 PIQ6901 PIU39011
PIQ7001 PIR17901
PIQ7003 PIR17601 PIR17701
PIQ7101 PIU4206 PIQ7201 PIU42011
PIQ7301 PIR18401
PIQ7303 PIR18101 PIR18201
PIQ7401 PIU4203 PIQ7501 PIU4208
PIQ7601 PIR18901
PIQ7603 PIR18601 PIR18701
PIQ7701 PIU4603
PIQ7801 PIR19401
PIQ7803 PIR19101 PIR19201
PIQ7901 PIU4608
PIQ8001 PIU4606
PIQ8101 PIU46011
PIQ8201 PIR19902
PIQ8203 PIR19601 PIR19701
PIQ8301 PIR20802
PIQ8303 PIR20501 PIR20601
PIQ8401 PIU49011
PIQ8501 PIU4906
PIQ8601 PIR21301
PIQ8603 PIR21001 PIR21101
PIQ8701 PIU4908
PIQ8801 PIU4903
PIQ8901 PIR21802
PIQ8903 PIR21501 PIR21601
PIQ9001 PIR22302
PIQ9003 PIR22001 PIR22101
PIR302 PIU2037
PIR2302 PIU601
PIR3202 PIU701
PIR3702 PIU801
PIR4202 PIU1001
PIR4702 PIU1101
PIR5202 PIU1201
PIR5702 PIU1301
PIR6202 PIU1401
PIR6702 PIU1501
PIR7202 PIU1701
PIR7702 PIU1801
PIR8602 PIU1901
PIR9102 PIU2101
PIR9602 PIU2301
PIR10302 PIU2401
PIR11002 PIU2501
PIR11502 PIU2701
PIR12002 PIU2801
PIR12502 PIU3001
PIR13002 PIU3101
PIR13902 PIU3201
PIR14402 PIU3401
PIR14902 PIU3501
PIR15402 PIU3601
PIR15902 PIU3701
PIR16402 PIU3801
PIR16902 PIU4001
PIR17802 PIU4101
PIR18302 PIU4301
PIR18802 PIU4401
PIR19302 PIU4501
PIR19802 PIU4701
PIR20702 PIU4801
PIR21202 PIU5001
PIR21702 PIU5101
PIR22202 PIU5201
PIR23302 PIU5308
PIR23402 PIU5303 PIR23502 PIU5306
PIR23602 PIU53011
PIR24502 PIU5408
PIR24602 PIU54011
PIR24702 PIU5403 PIR24802 PIU5406
PIR25702 PIU5508
PIR25802 PIU5506
PIR25902 PIU55011
PIR26002 PIU5503
PIU207
PIU2017
PIU2018
PIU2033
PIU2034
PIU2038
PIU2039
PIU2067
PIU2077
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
PIU2089
PIU2090 PIU2091
PIU208
NLOSC320IN
PIU209 NLOSC320OUT
PIC1002
PIU2012
PIY102
NLOSCIN
PIC902
PIU2013 PIY101 NLOSCOUT
PIC802
PIR501 PIS102
PIU2014
NLR\E\S\E\T\
PID4502
PID4602 PID4702
PID4802
PID4902
PID5002
PID5102 PID5202
PID5302
PID5402
PID5502
PID5602
PIU402
PIR1202
PIU2092
PIU306
NLSCL
PIR1301
PIU2093
PIU305
NLSDA
PIP202
PIR601
PIU2076
NLSWD0CLK
PIP204
PIR701
PIU2072 NLSWD0DAT
PIQ1501 PIU9011
NLU3011
PIP103
PIU2069
NLUART0RX
PIP102
PIU2068
NLUART0TX
PIC2101
PIC2602
PIC3102
PIC3702
PIC4202
PIC4702
PIC5302
PID802
PIFB101
PIQ503
PIU604
PIU704
PIU804
PIU9014
PIU1004
PIU1104
PIU1204
PIU1304
PIU1404
PIU1504
PIU1704
PIU1804
PIU1904
PIU20014
PIU2104
PIU2304
PIU2404
PIU2504
PIU26014
PIU2704
PIU2804
PIU3004
PIU3104
PIU3204
PIU33014
PIU3404
PIU3504
PIU3604
PIU3704
PIU3804
PIU4004
PIU4104
PIU42014
PIU4304
PIU4404
PIU4504
PIU4704
PIU4804
PIU49014
PIU5004
PIU5104
PIU5204
PIU53014
PIU54014
PIU55014
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
D D
C C
B B
A A
Title
Number RevisionSize
Orcad E
Date: 2019/10/23 Sheet of
File: D:\UVIC机器狗 \..\STM32F407VET6.SchDocDrawn By:
DGND
330uH
L1
DGND
100uF/50VC5 D1
1N5819330uF/16V
C3
+5V
C4
104
GND3
OUT 2VIN1
FB4
ON/OFF5
GND6
U1
LM2575D2T-5
5V转3. 3 V电路
VIN3
GN
D1
OUT2
V1
AMS1117-3.3V
C1
104
+ CV2
10uF/16V
+ CV1
10uF/16V
C2
104
DGND DGND
+5V
+24VD
1K
R1
D2
DGND
1
2
J0
2EDG508DGND
+24VD
DGND0
R2
SWD_DAT
SWD_CLK
DGND
+3.3V
10K
R4DGND
20pF
C9
20pF
C10
DGND DGND
RESET
104
C8
+3.3V
DGND
SWD_DATSWD_CLK
BOOT0
UART_RXUART_TX
10K
R7
10K
R6
+3.3V
DGND
SCLSDA
10K
R5
存储模块
4.7KR12
4.7KR13
EEPROM +3.3V
DGND
A01
VCC8
VSS4 NC3
SCL6
SDA5
A12
WP7
U3
24C04
DGND
S1
1
23
4
P2
UART_RXUART_TX1
234
P1
+3.3V
PA0-WKUP(PA0)/USART2_CTS/UART4_TX/ETH_MII_CRS/TIM2_CH1_ETR/TIM5_CH1/TIM8_ETR/EVENTOUT/ADC123_IN0/WKUP23
PA1/USART2_RTS/UART4_RX/ETH_RMII_REF_CLK/ETH_MII_RX_CLK/TIM5_CH2/TIM2_CH2/EVENTOUT/ADC123_IN124
PA2/USART2_TX/TIM5_CH3/TIM9_CH1/TIM2_CH3/ETH_MDIO/EVENTOUT/ADC123_IN225
PA3/USART2_RX/TIM5_CH4/TIM9_CH2/TIM2_CH4/OTG_HS_ULPI_D0/ETH_MII_COL/EVENTOUT/ADC123_IN326
PA4/SPI1_NSS/SPI3_NSS/USART2_CK/DCMI_HSYNC/OTG_HS_SOF/I2S3_WS/EVENTOUT/ADC12_IN4/DAC1_OUT29
PA5/SPI1_SCK/OTG_HS_ULPI_CK/TIM2_CH1_ETR/TIM8_CHIN/EVENTOUT/ADC12_IN5/DAC2_OUT30
PA6/SPI1_MISO/TIM8_BKIN/TIM13_CH1/DCMI_PIXCLK/TIM3_CH1/TIM1_BKIN/EVENTOUT/ADC12_IN6 31
PA7/SPI1_MOSI/TIM8_CH1N/TIM14_CH1/TIM3_CH2/ETH_MII_RX_DV/TIM1_CH1N/RMII_CRS_DV/EVENTOUT/ADC12_IN732
PA8/MCO1/USART1_CK/TIM1_CH1/I2C3_SCL/OTG_FS_SOF/EVENTOUT 67
PA9/USART1_TX/TIM1_CH2/I2C3_SMBA/DCMI_D0/EVENTOUT/OTG_FS_VBUS68
PA10/USART1_RX/TIM1_CH3/OTG_FS_ID/DCMI_D1/EVENTOUT 69
PA11/USART1_CTS/CAN1_RX/TIM1_CH4/OTG_FS_DM/EVENTOUT70
PA12/USART1_RTS/CAN1_TX/TIM1_ETR/OTG_FS_DP/EVENTOUT71
PA13(JTMS-SWDIO)/JTMS-SWDIO/EVENTOUT72
PA14(JTCK-SWCLK)/JTCK-SWCLK/EVENTOUT76
PA15(JTDI)/JTDI/SPI3_NSS/I2S3_WS/TIM2_CH1_ETR/SPI1_NSS/EVENTOUT 77
PB0/TIM3_CH3/TIM8_CH2N/OTG_HS_ULPI_D1/ETH_MII_RXD2/TIM1_CH2N/EVENTOUT/ADC12_IN8 35
PB1/TIM3_CH4/TIM8_CH3N/OTG_HS_ULPI_D2/ETH_MII_RXD3/OTG_HS_INTN/TIM1_CH3N/EVENTOUT/ADC12_IN936
PB2-BOOT1(PB2)/EVENTOUT 37
PB3(JTDO/TRACESWO)/JTDO/TRACESWO/SPI3_SCK/I2S3_CK/TIM2_CH2/SPI1_SCK/EVENTOUT89
PB4(NJTRST)/NJTRST/SPI3_MISO/TIM3_CH1/SPI1_MISO/I2S3ext_SD/EVENTOUT90
PB5/I2C1_SMBA/CAN2_RX/OTG_HS_ULPI_D7/ETH_PPS_OUT/TIM3_CH2/SPI1_MOSI/SPI3_MOSI/DCMI_D10/I2S3_SD/EVENTOUT91
PB6/I2C1_SCL/TIM4_CH1/CAN2_TX/DCMI_D5/USART1_TX/EVENTOUT92
PB7/I2C1_SDA/FSMC_NL/DCMI_VSYNC/USART1_RX/TIM4_CH2/EVENTOUT93
PB8/TIM4_CH3/SDIO_D4/TIM10_CH1/DCMI_D6/ETH_MII_TXD3/I2C1_SCL/CAN1_RX/EVENTOUT95
PB9/SPI2_NSS/I2S2_WS/TIM4_CH4/TIM11_CH1/SDIO_D5/DCMI_D7/I2C1_SDA/CAN1_TX/EVENTOUT 96
PB10/SPI2_SCK/I2S2_CK/I2C2_SCL/USART3_TX/OTG_HS_ULPI_D3/ETH_MII_RX_ER/TIM2_CH3/EVENTOUT47
PB11/I2C2_SDA/USART3_RX/OTG_HS_ULPI_D4/ETH_RMII_TX_EN/ETH_MII_TX_EN/TIM2_CH4/EVENTOUT 48
PB12/SPI2_NSS/I2S2_WS/I2C2_SMBA/USART3_CK/TIM1_BKIN/CAN2_RX/OTG_HS_ULPI_D5/ETH_RMII_TXD0/ETH_MII_TXD0/OTG_HS_ID/EVENTOUT51
PB13/SPI2_SCK/I2S2_CK/USART3_CTS/TIM1_CH1N/CAN2_TX/OTG_HS_ULPI_D6/ETH_RMII_TXD1/ETH_MII_TXD1/EVENTOUT/OTG_HS_VBUS52
PB14/SPI2_MISO/TIM1_CH2N/TIM12_CH1/OTG_HS_DM/USART3_RTS/TIM8_CH2N/I2S2ext_SD/EVENTOUT53
PB15/SPI2_MOSI/I2S2_SD/TIM1_CH3N/TIM8_CH3N/TIM12_CH2/OTG_HS_DP/EVENTOUT54
U2A
STM32F407VET6
PC0/OTG_HS_ULPI_STP/EVENTOUT/ADC123_IN1015
PC1/ETH_MDC/EVENTOUT/ADC123_IN1116
PC2/SPI2_MISO/OTG_HS_ULPI_DIR/TH_MII_TXD2/I2S2ext_SD/EVENTOUT/ADC123_IN1217
PC3/SPI2_MOSI/I2S2_SD/OTG_HS_ULPI_NXT/ETH_MII_TX_CLK/EVENTOUT/ADC123_IN1318
PC4/ETH_RMII_RX_D0/ETH_MII_RX_D0/EVENTOUT/ADC12_IN1433
PC5/ETH_RMII_RX_D1/ETH_MII_RX_D1/EVENTOUT/ADC12_IN15 34
PC6/I2S2_MCK/TIM8_CH1/SDIO_D6/USART6_TX/DCMI_D0/TIM3_CH1/EVENTOUT63
PC7/I2S3_MCK/TIM8_CH2/SDIO_D7/USART6_RX/DCMI_D1/TIM3_CH2/EVENTOUT 64
PC8/TIM8_CH3/SDIO_D0/TIM3_CH3/USART6_CK/DCMI_D2/EVENTOUT65
PC9/I2S_CKIN/MCO2/TIM8_CH4/SDIO_D1//I2C3_SDA/DCMI_D3/TIM3_CH4/EVENTOUT 66
PC10/SPI3_SCK/I2S3_CK/UART4_TX/SDIO_D2/DCMI_D8/USART3_TX/EVENTOUT78
PC11/UART4_RX/SPI3_MISO/SDIO_D3/DCMI_D4/USART3_RX/I2S3ext_SD/EVENTOUT79
PC12/UART5_TX/SDIO_CK/DCMI_D9/SPI3_MOSI/I2S3_SD/USART3_CK/EVENTOUT80
PC13/EVENTOUT/RTC_AF17
PC14-OSC32_IN(PC14)/EVENTOUT/OSC32_IN 8
PC15-OSC32_OUT(PC15)/EVENTOUT/OSC32_OUT9
PD0/FSMC_D2/CAN1_RX/EVENTOUT81
PD1/FSMC_D3/CAN1_TX/EVENTOUT 82
PD2/TIM3_ETR/UART5_RX/SDIO_CMD/DCMI_D11/EVENTOUT83
PD3/FSMC_CLK/USART2_CTS/EVENTOUT84
PD4/FSMC_NOE/USART2_RTS/EVENTOUT85
PD5/FSMC_NWE/USART2_TX/EVENTOUT86
PD6/FSMC_NWAIT/USART2_RX/EVENTOUT87
PD7/USART2_CK/FSMC_NE1/FSMC_NCE2/EVENTOUT88
PD8/FSMC_D13/USART3_TX/EVENTOUT 55
PD9/FSMC_D14/USART3_RX/EVENTOUT56
PD10/FSMC_D15/USART3_CK/EVENTOUT 57
PD11/FSMC_CLE/FSMC_A16/USART3_CTS/EVENTOUT58
PD12/FSMC_ALE/FSMC_A17/TIM4_CH1/USART3_RTS/EVENTOUT59
PD13/FSMC_A18/TIM4_CH2/EVENTOUT60
PD14/FSMC_D0/TIM4_CH3/EVENTOUT/EVENTOUT61
PD15/FSMC_D1/TIM4_CH4/EVENTOUT62
U2B
STM32F407VET6
PE0/TIM4_ETR/FSMC_NBL0/DCMI_D2/EVENTOUT97
PE1/FSMC_NBL1/DCMI_D3/EVENTOUT98
PE2/TRACECLK/FSMC_A23/ETH_MII_TXD3/EVENTOUT1
PE3/TRACED0/FSMC_A19/EVENTOUT2
PE4/TRACED1/FSMC_A20/DCMI_D4/EVENTOUT3
PE5/TRACED2/FSMC_A21/TIM9_CH1/DCMI_D6/EVENTOUT4
PE6/TRACED3/FSMC_A22/TIM9_CH2/DCMI_D7/EVENTOUT 5
PE7/FSMC_D4/TIM1_ETR/EVENTOUT38
PE8/FSMC_D5/TIM1_CH1N/EVENTOUT 39
PE9/FSMC_D6/TIM1_CH1/EVENTOUT40
PE10/FSMC_D7/TIM1_CH2N/EVENTOUT 41
PE11/FSMC_D8/TIM1_CH2/EVENTOUT42
PE12/FSMC_D9/TIM1_CH3N/EVENTOUT43
PE13/FSMC_D10/TIM1_CH3/EVENTOUT44
PE14/FSMC_D11/TIM1_CH4/EVENTOUT45
PE15/FSMC_D12/TIM1_BKIN/EVENTOUT 46
U2C
STM32F407VET6
VREF+21
VBAT6
VDD11
VDD19
VDD28
VDD50
VDD75
VDD100
VDDA22
VSS10
VSS 27
VSS74
VSS 99
VSSA20
U2E
STM32F407VET6
PH0-OSC_IN(PH0)/EVENTOUT/OSC_IN12
PH1-OSC_OUT(PH1)/EVENTOUT/OSC_OUT 13BOOT0/VPP
94
NRST14
VCAP_149
VCAP_273
U2D
STM32F407VET6
OSCIN
OSCOUT
C6 2.2uFC7 2.2uF
DGND
+3.3V
DGND
OSC32_INOSC32_OUT
C130.1uF
C140.1uF
C150.1uF
C160.1uF
C120.1uF
C110.1uF
+3.3V
10K
R3DGND
SCLSDA
DGND
+3.3V
下载接口
R81K
R91K
123
45
6
CN1
DGND DGND
DGND
LED3_OUT LED4_OUT
LED1_OUTLED2_OUT
LED3_OUTLED4_OUT 用于接外部指示灯LED4
+3.3V
1
32
Q3
S8050
10K
R16LED3 1
32
Q4
S8050
10K
R17
R101K
R111K
DGND DGND
LED1_OUT
LED1 1
32
Q1
S8050
10K
R14 1
32
Q2
S8050
10K
R15LED2
LED2_OUT
+3.3V
DGND
M11
23
JK1
22HP-10
+3.3V
DGND
M21
23
JK2
22HP-10
+3.3V
DGND
M31
23
JK3
22HP-10
+3.3V
DGND
M41
23
JK4
22HP-10
+3.3V
DGND
M51
23
JK5
22HP-10
+3.3V
DGND
M61
23
JK6
22HP-10
+3.3V
DGND
M71
23
JK7
22HP-10
+3.3V
DGND
M81
23
JK8
22HP-10
+3.3V
DGND
M91
23
JK9
22HP-10
+3.3V
DGND
M101
23
JK10
22HP-10
+3.3V
DGND
M111
23
JK11
22HP-10
+3.3V
DGND
M121
23
JK12
22HP-10
M1M2
M3M4
M5M6
M7M8
M9M10
M11
M12
1 2
8MHZ
Y1
12
D5SMCJ24A
12
D6SMCJ24A
1
32
Q12MMBT3904
1
32
Q14
MMBT3904
1
32
Q19MMBT3904
1
32
Q20MMBT3904
1
32
Q10MMBT3904
1
32
Q6
MMBT2907
11
12
13
U9C
74VHC08MX
1
2
3
71
4
U9A
74VHC08MX
1
2 3
4U6
EL357N
1
2 3
4U7
EL357N
1
2 3
4U11
EL357N
1
2 3
4U8
EL357N
1
2 3
4U12
EL357N
1112
13U5C
74VHC00MX
+24V
GN
D1
Reset#2
VC
C3
U4
IMP809MEUR-T
GND2
FB2
4.7uH
Reset#
4.38V
C20
22uF
FB1
4.7uH
VCC
VCC
VCC
VCC
VCC
VCC
1
23
Q5
2SD1760
R195.6K
D7
ZMM6V2
+24V
VCC
12
D8
SMAJ5.0A
C21
220uF 16V
F1
PPTC自恢复保险丝印字 5X5
D9
1N4148R25510R
ENA_T
R34
4.7K
R494.7K
R394.7K
R54
4.7K
R24
10K
R21
10K
R22
10K+24V
4
56
U5B
74VHC00MX
89
10U5D
74VHC00MX
+24V
GND3
D3
ZMM6V2
R205.6K
+24V
C18
22uF
GND3
R33
10K
R30
10K
R31
10K+24V
R48
10K
R45
10K
R46
10K+24V
R38
10K
R35
10K
R36
10K+24V
R53
10K
R50
10K
R51
10K+24V
ENA
IN1
IN2
IN3
IN4
R23
510R
R32
1K
R47
1K
R37
1K
R52
1K
D111N4148
4
56
U9B
74VHC08MXD10
1N4148
D131N4148
8
9
10
U9D
74VHC08MX
D121N4148
VCC
C26
100nF
DA-1
DA-2
DB-2
DB-1
1
23
Q13NCE6075K
1
23
Q11
SUD50P06-15
+24V
1
23
Q18
NCE6075K
R28
1MC24
1nF
1
23
Q8
SUD50P06-15
+24V
1
23
Q16NCE6075K
+24V
R26
1MC22
1nF
+24V
1
23
Q15NCE6075K
1
23
Q9SUD50P06-15
R27
1MC23
1nF
R29
1MC25
1nF
1
23
Q7SUD50P06-15
D4
ZMM6V2
GND3
R184.7K
C191000uF 35V
C17
100nF
GND3
1
23
714
U5A
74VHC00MX
U3-11
IN1_T
IN3_T
IN1_T
IN3_T
IN2_T
IN4_T
IN2_T
IN4_T
ENA_24
ENA_24
IN1_24
IN1_24
IN2_24
ENB_24
IN3_24
IN3_24
IN4_24
IN4_24
IN2_24
MOTOR_1_+ MOTOR_1_-MOTOR_2_+ MOTOR_2_-
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
DS1
1
32
Q17MMBT3904
1
2 3
4U10
EL357N
VCCD14
1N4148R44510R
R43
10K
R40
10K
R41
10K+24V
ENB
R42
510RENB_T
ENB_24+3.3V
IN1
IN2
ENA
IN3
IN4
ENB
1
23
71
4
U53A
74VHC00MX
4
56
U53B
74VHC00MX
R234
4.7K
R235
4.7K
VCC
D46
1N4148
Reset#
R226
10KR23010K
DA-1
DA-2 DB-2
Reset#
R227
10KR23110K
D47
1N4148
DB-1
ENA_T ENB_T
12
J2
2EDG508
12
J1
2EDG508
MOTOR_1_+
MOTOR_1_-
MOTOR_2_+
MOTOR_2_-
12
J13
2EDG508
+24V
1
32
Q29MMBT3904
1
32
Q30MMBT3904
1
32
Q26MMBT3904
89
10U20D
74VHC08MX
4
5
6
U20B
74VHC08MX
1
2 3
4U17
EL357N
1
2 3
4U18
EL357N
1
2 3
4U19
EL357N
VCC
VCC
VCCD16
1N4148R74
510R
END_T
R834.7K
R88
4.7K
R73
10K
R70
10K
R71
10K+24V
4
5
6U16B
74VHC00MX
8
9
10U16D
74VHC00MX
R80
10K
R75
10K
R76
10K+24V
R87
10K
R84
10K
R85
10K+24V
END
R72
510R
R77
1K
R86
1K
D18
1N4148
D20
1N4148
1
23
Q32
NCE6075K
1
23
Q28
SUD50P06-15
+24V
R81
1MC29
1nF
1
23
Q25
SUD50P06-15
+24V
1
23
Q34NCE6075K
R82
1MC30
1nF
IN7_T
IN8_T
END_24
IN7_24
IN8_24
MOTOR_4_+ MOTOR_4_-
+3.3V
+3.3V
+3.3V
IN8_24
IN7_T
IN8_T
DD1
DD2
1112
13
U20C
74VHC08MX
1
2
3
71
4
U20A
74VHC08MX
1
2
3
714
U16A
74VHC00MX
11
12
13U16C
74VHC00MX
+24V
GND3
D17
1N4148
D191N4148
VCC
C31
100nF
1
23
Q31NCE6075K
1
23
Q27
SUD50P06-15
+24V
R78
1MC27
1nF
1
23
Q24
SUD50P06-15
+24V
1
23
Q33NCE6075K
R79
1MC28
1nF
MOTOR_3_-MOTOR_3_+
DC-2
DC-1
IN5_T
IN6_T
IN5_24
IN6_24
ENC_24 IN7_24
END_24
1
32
Q21MMBT3904
1
2 3
4U13
EL357N
VCCD15
1N4148R59510R
R58
10K
R55
10K
R56
10K+24VR57
510RENC_T
ENC_24
1
32
Q22MMBT3904
1
32
Q23MMBT3904
1
2 3
4U14
EL357N
1
2 3
4U15
EL357N
VCC
VCC
R644.7K
R69
4.7K
R63
10K
R60
10K
R61
10K+24V
R68
10K
R65
10K
R66
10K+24V
R62
1K
R67
1K
IN5_T
IN6_T
IN5_24
IN6_24
ENC
IN5
IN6
+3.3V
+3.3V
+3.3V
IN5
IN6
ENC
IN7
IN8
END
R233
4.7K
D45
1N4148
Reset#
R225
10KR22910K
DD1
DD2
END_T11
12
13U53C
74VHC00MX
89
10U53D
74VHC00MX
R236
4.7K
DC-2
Reset#
R228
10KR23210K
D48
1N4148
DC-1
ENC_T
12
J3
2EDG508
12
J4
2EDG508
MOTOR_3_+MOTOR_3_-
MOTOR_4_+MOTOR_4_-
IN8
IN7
1112
13U26C
74VHC08MX
1
2
3
714
U26A
74VHC08MX
1
23
714
U22A
74VHC00MX
89
10U22D
74VHC00MX
+24V
GND3
D23
1N4148
D241N4148
VCC
C37
100nF
1
23
Q42NCE6075K
1
23
Q40
SUD50P06-15
+24V
R99
1MC33
1nF
1
23
Q37
SUD50P06-15
+24V
1
23
Q46NCE6075K
R100
1MC34
1nFMOTOR_6_-MOTOR_6_+
ENF_24
IN11_24
IN12_24
DF2
DF1
IN11_T
IN12_T
1112
13U22C
74VHC00MX
D251N4148
4
56
U26B
74VHC08MX
D261N4148
89
10
U26D
74VHC08MX
1
23
Q47
NCE6075K
+24V
R104
1MC35
1nF
+24V
1
23
Q44NCE6075K
1
23
Q39
SUD50P06-15
R105
1MC36
1nF
1
23
Q36
SUD50P06-15
4
56
U22B
74VHC00MX
MOTOR_5_+ MOTOR_5_-
ENE_24
IN9_24
IN10_24
IN9_T
IN10_T
DE2
DE1
1
32
Q43MMBT3904
1
2 3
4U25
EL357N
VCCD22
1N4148R112510R
R111
10K
R108
10K
R109
10K+24VR110
510RENF_T
ENF_24
1
32
Q45MMBT3904
1
32
Q48MMBT3904
1
2 3
4U27
EL357N
1
2 3
4U28
EL357N
VCC
VCC
R1174.7K
R122
4.7K
R116
10K
R113
10K
R114
10K+24V
R121
10K
R118
10K
R119
10K+24V
R115
1K
R120
1K
IN11_T
IN12_T
IN11_24
IN12_24
ENF
IN11
IN12
+3.3V
+3.3V
+3.3V
1
32
Q38MMBT3904
1
32
Q41MMBT3904
1
2 3
4U23
EL357N
1
2 3
4U24
EL357N
VCC
VCC
R984.7K
R107
4.7K
R97
10K
R94
10K
R95
10K+24V
R106
10K
R101
10K
R102
10K+24V
IN9
IN10
R96
1K
R103
1K
IN9_T
IN10_T
IN9_24
IN10_24
+3.3V
+3.3V
1
32
Q35
MMBT3904
1
2 3
4U21
EL357N
VCCD21
1N4148R93510R
R92
10K
R89
10K
R90
10K+24V
ENE
R91
510RENE_T
ENE_24+3.3V
IN10
IN11
IN12
ENF
IN9
ENE
4
56
U54B
74VHC00MX
1
23
714
U54A
74VHC00MX
VCC
R247
4.7K
DE2
Reset#
R240
10KR24310K
D51
1N4148
DE1
R248
4.7K
DF2
Reset#
R241
10KR24410K
D52
1N4148
DF1
ENE_T ENF_T
1
2
J5
2EDG508
1
2
J6
2EDG508
MOTOR_5_+MOTOR_5_-
MOTOR_6_+MOTOR_6_-
1
32
Q58
MMBT3904
1
2 3
4U34
EL357N
VCC D28
1N4148R146510R
R145
10K
R142
10K
R143
10K+24V
ENH
R144
510RENH_T
ENH_24+3.3V
1
32
Q61MMBT3904
1
32
Q62
MMBT3904
1
2 3
4U35
EL357N
1
2 3
4U36
EL357N
VCC
VCC
R1514.7K
R156
4.7K
R150
10K
R147
10K
R148
10K+24V
R155
10K
R152
10K
R153
10K+24V
IN15
IN16
R149
1K
R154
1K
IN15_T
IN16_T
IN15_24
IN16_24
+3.3V
+3.3V
1
32
Q53MMBT3904
1
32
Q55MMBT3904
1
2 3
4U31
EL357N
1
2 3
4U32
EL357N
VCC
VCC
R1344.7K
R141
4.7K
R133
10K
R128
10K
R129
10K+24V
R140
10K
R137
10K
R138
10K+24V
IN13
IN14
R130
1K
R139
1K
IN13_T
IN14_T
IN13_24
IN14_24
+3.3V
+3.3V
1
32
Q50MMBT3904
1
2 3
4U30
EL357N
VCCD27
1N4148R127
510R
ENG_T R126
10K
R123
10K
R124
10K+24V
ENG
R125
510R
ENG_24+3.3V
IN13
IN14
ENG
IN15
IN16
ENH8
9
10U33D
74VHC08MX
4
56
U33B
74VHC08MX
4
56
U29B74VHC00MX
89
10U29D
74VHC00MX
+24V
GND3
D301N4148
D321N4148
VCC
C42
100nF
1
23
Q57NCE6075K
1
23
Q54SUD50P06-15
+24V
R135
1MC40
1nF
1
23
Q51SUD50P06-15
+24V
1
23
Q60
NCE6075K
R136
1MC41
1nFMOTOR_7_+ MOTOR_7_-
ENG_24
IN13_24
IN14_24
DG1
DG2
IN13_T
IN14_T
1112
13U29C
74VHC00MX
D291N4148
1
2
3
714
U33A
74VHC08MX
D31
1N4148
11
12
13
U33C
74VHC08MX
1
23
Q59
NCE6075K
+24V
R131
1MC38
1nF
+24V
1
23
Q56NCE6075K
1
23
Q52SUD50P06-15
R132
1MC39
1nF
1
23
Q49SUD50P06-15
1
23
714
U29A
74VHC00MX
MOTOR_8_+ MOTOR_8_-
ENH_24
IN15_24
IN16_24
DH2
DH1
IN15_T
IN16_T
R246
4.7K
D50
1N4148
Reset#
R238
10KR242
10K
DG1
DG2
ENG_T11
12
13U54C
74VHC00MX
1
2
J7
2EDG508
MOTOR_7_+MOTOR_7_-
MOTOR_8_+
MOTOR_8_-12
J8
2EDG508
R245
4.7K
DH2
Reset#
R237
10KR23910K
D49
1N4148
DH1
ENH_T89
10U54D
74VHC00MX
1
32
Q73
MMBT3904
1
32
Q76MMBT3904
1
32
Q70MMBT3904
1
2 3
4U41
EL357N
1
2 3
4U43
EL357N
1
2 3
4U44
EL357N
VCC
VCC
VCCD34
1N4148R180
510R
ENJ_T
R1854.7K
R1904.7K
R179
10K
R176
10K
R177
10K+24V
R184
10K
R181
10K
R182
10K+24V
R189
10K
R186
10K
R187
10K+24V
ENJ
IN19
IN20
R178
510R
R183
1K
R188
1K
IN19_T
IN20_T
ENJ_24
IN19_24
IN20_24
+3.3V
+3.3V
+3.3V
1
32
Q63MMBT3904
1
2 3
4U37
EL357N
VCCD33
1N4148R161
510R
R160
10K
R157
10K
R158
10K+24VR159
510RENI_T
ENI_24
1
32
Q64MMBT3904
1
32
Q67
MMBT3904
1
2 3
4U38
EL357N
1
2 3
4U40
EL357N
VCC
VCC
R166
4.7K
R1714.7K
R165
10K
R162
10K
R163
10K+24V
R170
10K
R167
10K
R168
10K+24V
R164
1K
R169
1K
IN17_T
IN18_T
IN17_24
IN18_24
ENI
IN17
IN18
+3.3V
+3.3V
+3.3V
8
9
10U42D
74VHC08MX
4
56
U42B
74VHC08MX
4
56 U39B
74VHC00MX
89
10U39D
74VHC00MX
D361N4148
D381N4148
1
23
Q72NCE6075K
1
23
Q69SUD50P06-15
+24V
R174
1MC45
1nF
1
23
Q66SUD50P06-15
+24V
1
23
Q75
NCE6075K
R175
1MC46
1nFMOTOR_10_+ MOTOR_10_-
ENJ_24
IN19_24
IN20_24
DJ1
DJ2
IN19_T
IN20_T
11
12
13U42C
74VHC08MX
1
2
3
714
U42A74VHC08MX
1
23
714
U39A
74VHC00MX
1112
13U39C
74VHC00MX
+24V
GND3
D351N4148
D371N4148
VCC
C47
100nF
1
23
Q71NCE6075K
1
23
Q68SUD50P06-15
+24V
R172
1MC43
1nF
1
23
Q65SUD50P06-15
+24V
1
23
Q74
NCE6075K
R173
1MC44
1nFMOTOR_9_-MOTOR_9_+
ENI_24
IN17_24
IN18_24
DI2
DI1
IN17_T
IN18_T
4
56
U55B
74VHC00MX
R258
4.7K
VCC
D54
1N4148
Reset#
R250
10KR25410K
DJ1
DJ2
ENJ_T1
23
714
U55A
74VHC00MX
R260
4.7K
DI2
Reset#
R253
10KR256
10K
D56
1N4148
DI1
ENI_T
12
J10
2EDG508
12
J9
2EDG508
MOTOR_9_+MOTOR_9_-
MOTOR_10_+MOTOR_10_-
1
32
Q86
MMBT3904
1
2 3
4U50
EL357N
VCCD41
1N4148R214
510R
R213
10K
R210
10K
R211
10K+24VR212
510RENL_T
ENL_24
1
32
Q89MMBT3904
1
32
Q90
MMBT3904
1
2 3
4U51
EL357N
1
2 3
4U52
EL357N
VCC
VCC
R219
4.7K
R2244.7K
R218
10K
R215
10K
R216
10K+24V
R223
10K
R220
10K
R221
10K+24V
R217
1K
R222
1K
IN23_T
IN24_T
IN23_24
IN24_24
ENL
IN23
IN24
+3.3V
+3.3V
+3.3V
1
32
Q82
MMBT3904
1
32
Q83MMBT3904
1
2 3
4U47
EL357N
1
2 3
4U48
EL357N
VCC
VCC
R2044.7K
R209
4.7K
R199
10K
R196
10K
R197
10K+24V
R208
10K
R205
10K
R206
10K+24V
IN21
IN22
R198
1K
R207
1K
IN21_T
IN22_T
IN21_24
IN22_24
+3.3V
+3.3V
1
32
Q78
MMBT3904
1
2 3
4U45
EL357N
VCCD39
1N4148R195
510R
R194
10K
R191
10K
R192
10K+24V
ENK
R193
510RENK_T
ENK_24+3.3V
IN21
IN22
ENK
IN23
IN24
ENL
11
12
13U49C
74VHC08MX
1
2
3
714
U49A
74VHC08MX
4
5
6U46B
74VHC00MX
89
10U46D
74VHC00MX
+24V
GND3
D401N4148
D431N4148
VCC
C53
100nF
1
23
Q84NCE6075K
1
23
Q81SUD50P06-15
+24V
R202
1MC51
1nF
1
23
Q79SUD50P06-15
+24V
1
23
Q87
NCE6075K
R203
1MC52
1nFMOTOR_12_-MOTOR_12_+
ENL_24
IN23_24
IN24_24
DL2
DL1
IN23_T
IN24_T
1112
13U46C
74VHC00MX
D421N4148
4
56
U49B
74VHC08MX
D441N4148
8
9
10
U49D
74VHC08MX1
23
Q88
NCE6075K
+24V
R200
1MC49
1nF
+24V
1
23
Q85NCE6075K
1
23
Q80
SUD50P06-15
R201
1MC50
1nF
1
23
Q77
SUD50P06-151
2
3
714
U46A
74VHC00MX
MOTOR_11_+ MOTOR_11_-
ENK_24
IN21_24
IN22_24
DK2
DK1
IN21_T
IN22_T
1112
13U55C
74VHC00MX
R259
4.7K
DK2
Reset#
R251
10KR25510K
D55
1N4148
DK1
ENK_T
R257
4.7K
DL2
Reset#
R249
10KR252
10K
D53
1N4148
DL1
ENL_T8
9
10U55D
74VHC00MX
1
2
J11
2EDG508
1
2
J12
2EDG508
MOTOR_11_+MOTOR_11_- MOTOR_12_-
MOTOR_12_+
+3.3V
LED4LED3
LED1
LED2
ENAIN1
IN2ENB
IN4IN3
ENCIN5IN6
ENDIN7
IN8
ENE
IN9IN10
ENFIN11IN12
ENG
IN13
IN14
ENHIN15
IN16ENIIN17
IN18
ENJ
IN19IN20
ENL
ENK
IN22
IN21
IN23
IN24
PIC101
PIC102
COC1 PIC201
PIC202
COC2
PIC301
PIC302
COC3 PIC401
PIC402
COC4 PIC501
PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIC801
PIC802
COC8
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10
PIC1101 PIC1102
COC11 PIC1201 PIC1202
COC12 PIC1301 PIC1302 COC13
PIC1401 PIC1402
COC14 PIC1501 PIC1502 COC15
PIC1601 PIC1602 COC16
PIC1701
PIC1702 COC17
PIC1801
PIC1802
COC18
PIC1901
PIC1902
COC19
PIC2001
PIC2002 COC20
PIC2101
PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702
COC27
PIC2801 PIC2802
COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601 PIC3602
COC36
PIC3701 PIC3702
COC37
PIC3801 PIC3802
COC38
PIC3901 PIC3902
COC39
PIC4001 PIC4002
COC40
PIC4101 PIC4102
COC41
PIC4201 PIC4202
COC42
PIC4301 PIC4302
COC43
PIC4401 PIC4402
COC44
PIC4501 PIC4502
COC45
PIC4601 PIC4602
COC46
PIC4701 PIC4702
COC47
PIC4901 PIC4902
COC49
PIC5001 PIC5002
COC50
PIC5101 PIC5102
COC51
PIC5201 PIC5202
COC52
PIC5301 PIC5302
COC53
PICN101 PICN102
PICN103
PICN104
PICN105
PICN106
COCN1
PICV101
PICV102
COCV1 PICV201
PICV202
COCV2
PID101
PID102 COD1
PID201
PID202 COD2
PID301
PID302 COD3
PID401
PID402 COD4
PID501
PID502
COD5
PID601
PID602
COD6
PID701
PID702 COD7
PID801
PID802 COD8
PID901 PID902
COD9
PID1001
PID1002
COD10
PID1101
PID1102
COD11
PID1201
PID1202 COD12
PID1301
PID1302
COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PID1601 PID1602
COD16
PID1701
PID1702
COD17
PID1801
PID1802
COD18
PID1901
PID1902 COD19
PID2001
PID2002 COD20
PID2101 PID2102
COD21
PID2201 PID2202
COD22
PID2301
PID2302
COD23
PID2401
PID2402
COD24
PID2501
PID2502
COD25
PID2601
PID2602 COD26
PID2701 PID2702
COD27
PID2801 PID2802
COD28
PID2901
PID2902
COD29
PID3001
PID3002
COD30
PID3101
PID3102 COD31
PID3201
PID3202 COD32
PID3301 PID3302
COD33
PID3401 PID3402
COD34
PID3501
PID3502
COD35 PID3601
PID3602
COD36
PID3701
PID3702 COD37
PID3801
PID3802 COD38
PID3901 PID3902
COD39
PID4001
PID4002
COD40
PID4101 PID4102
COD41
PID4201
PID4202
COD42
PID4301
PID4302 COD43
PID4401
PID4402 COD44
PID4501 PID4502
COD45
PID4601 PID4602
COD46
PID4701 PID4702
COD47
PID4801 PID4802
COD48
PID4901 PID4902
COD49
PID5001 PID5002
COD50
PID5101 PID5102
COD51
PID5201 PID5202
COD52
PID5301 PID5302
COD53
PID5401 PID5402
COD54
PID5501 PID5502
COD55
PID5601 PID5602
COD56
PIDS101
PIDS102 CODS1
PIF101
PIF102 COF1
PIFB101 PIFB102
COFB1
PIFB201 PIFB202
COFB2
PIJ001 PIJ002
COJ0
PIJ101
PIJ102
COJ1
PIJ201
PIJ202
COJ2
PIJ301
PIJ302
COJ3
PIJ401
PIJ402
COJ4
PIJ501
PIJ502
COJ5
PIJ601
PIJ602
COJ6
PIJ701
PIJ702
COJ7 PIJ801
PIJ802
COJ8
PIJ901
PIJ902
COJ9
PIJ1001
PIJ1002
COJ10
PIJ1101
PIJ1102
COJ11
PIJ1201
PIJ1202
COJ12
PIJ1301
PIJ1302
COJ13
PIJK101 PIJK102
PIJK103
COJK1
PIJK201 PIJK202
PIJK203
COJK2
PIJK301 PIJK302
PIJK303
COJK3
PIJK401 PIJK402
PIJK403
COJK4
PIJK501 PIJK502
PIJK503
COJK5
PIJK601 PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PIP101
PIP102
PIP103
PIP104
COP1
PIP201
PIP202
PIP203 PIP204
COP2
PIQ101
PIQ102
PIQ103 COQ1
PIQ201
PIQ202
PIQ203 COQ2
PIQ301
PIQ302
PIQ303 COQ3
PIQ401
PIQ402
PIQ403 COQ4
PIQ501
PIQ502
PIQ503
COQ5
PIQ601
PIQ602
PIQ603
COQ6
PIQ701
PIQ702
PIQ703 COQ7
PIQ801
PIQ802
PIQ803 COQ8
PIQ901
PIQ902
PIQ903 COQ9
PIQ1001
PIQ1002
PIQ1003 COQ10
PIQ1101
PIQ1102
PIQ1103 COQ11
PIQ1201
PIQ1202
PIQ1203
COQ12
PIQ1301
PIQ1302
PIQ1303
COQ13
PIQ1401
PIQ1402
PIQ1403 COQ14
PIQ1501
PIQ1502
PIQ1503
COQ15
PIQ1601
PIQ1602
PIQ1603
COQ16
PIQ1701
PIQ1702
PIQ1703 COQ17
PIQ1801
PIQ1802
PIQ1803
COQ18
PIQ1901
PIQ1902
PIQ1903 COQ19
PIQ2001
PIQ2002
PIQ2003 COQ20
PIQ2101
PIQ2102
PIQ2103 COQ21
PIQ2201
PIQ2202
PIQ2203 COQ22
PIQ2301
PIQ2302
PIQ2303 COQ23
PIQ2401
PIQ2402
PIQ2403 COQ24
PIQ2501
PIQ2502
PIQ2503 COQ25
PIQ2601
PIQ2602
PIQ2603 COQ26
PIQ2701
PIQ2702
PIQ2703 COQ27
PIQ2801
PIQ2802
PIQ2803 COQ28
PIQ2901
PIQ2902
PIQ2903
COQ29
PIQ3001
PIQ3002
PIQ3003 COQ30
PIQ3101
PIQ3102
PIQ3103
COQ31
PIQ3201
PIQ3202
PIQ3203
COQ32
PIQ3301
PIQ3302
PIQ3303
COQ33
PIQ3401
PIQ3402
PIQ3403
COQ34
PIQ3501
PIQ3502
PIQ3503 COQ35
PIQ3601
PIQ3602
PIQ3603 COQ36
PIQ3701
PIQ3702
PIQ3703 COQ37
PIQ3801
PIQ3802
PIQ3803
COQ38 PIQ3901
PIQ3902
PIQ3903 COQ39
PIQ4001
PIQ4002
PIQ4003 COQ40
PIQ4101
PIQ4102
PIQ4103 COQ41
PIQ4201
PIQ4202
PIQ4203
COQ42
PIQ4301
PIQ4302
PIQ4303
COQ43
PIQ4401
PIQ4402
PIQ4403
COQ44
PIQ4501
PIQ4502
PIQ4503 COQ45
PIQ4601
PIQ4602
PIQ4603
COQ46
PIQ4701
PIQ4702
PIQ4703
COQ47
PIQ4801
PIQ4802
PIQ4803
COQ48
PIQ4901
PIQ4902
PIQ4903 COQ49
PIQ5001
PIQ5002
PIQ5003 COQ50
PIQ5101
PIQ5102
PIQ5103 COQ51
PIQ5201
PIQ5202
PIQ5203 COQ52
PIQ5301
PIQ5302
PIQ5303 COQ53
PIQ5401
PIQ5402
PIQ5403 COQ54
PIQ5501
PIQ5502
PIQ5503
COQ55
PIQ5601
PIQ5602
PIQ5603
COQ56
PIQ5701
PIQ5702
PIQ5703
COQ57
PIQ5801
PIQ5802
PIQ5803 COQ58
PIQ5901
PIQ5902
PIQ5903
COQ59
PIQ6001
PIQ6002
PIQ6003
COQ60
PIQ6101
PIQ6102
PIQ6103
COQ61
PIQ6201
PIQ6202
PIQ6203 COQ62
PIQ6301
PIQ6302
PIQ6303 COQ63
PIQ6401
PIQ6402
PIQ6403 COQ64
PIQ6501
PIQ6502
PIQ6503 COQ65
PIQ6601
PIQ6602
PIQ6603 COQ66
PIQ6701
PIQ6702
PIQ6703 COQ67
PIQ6801
PIQ6802
PIQ6803 COQ68
PIQ6901
PIQ6902
PIQ6903 COQ69
PIQ7001
PIQ7002
PIQ7003 COQ70
PIQ7101
PIQ7102
PIQ7103
COQ71
PIQ7201
PIQ7202
PIQ7203
COQ72
PIQ7301
PIQ7302
PIQ7303
COQ73
PIQ7401
PIQ7402
PIQ7403
COQ74
PIQ7501
PIQ7502
PIQ7503
COQ75
PIQ7601
PIQ7602
PIQ7603 COQ76
PIQ7701
PIQ7702
PIQ7703 COQ77
PIQ7801
PIQ7802
PIQ7803 COQ78
PIQ7901
PIQ7902
PIQ7903 COQ79
PIQ8001
PIQ8002
PIQ8003 COQ80
PIQ8101
PIQ8102
PIQ8103 COQ81
PIQ8201
PIQ8202
PIQ8203 COQ82
PIQ8301
PIQ8302
PIQ8303
COQ83
PIQ8401
PIQ8402
PIQ8403
COQ84
PIQ8501
PIQ8502
PIQ8503
COQ85
PIQ8601
PIQ8602
PIQ8603
COQ86
PIQ8701
PIQ8702
PIQ8703
COQ87
PIQ8801
PIQ8802
PIQ8803
COQ88
PIQ8901
PIQ8902
PIQ8903 COQ89
PIQ9001
PIQ9002
PIQ9003
COQ90
PIR101
PIR102 COR1
PIR201 PIR202
COR2
PIR301 PIR302
COR3
PIR401 PIR402
COR4
PIR501
PIR502
COR5
PIR601
PIR602 COR6
PIR701
PIR702 COR7
PIR801
PIR802 COR8
PIR901
PIR902 COR9
PIR1001
PIR1002 COR10
PIR1101
PIR1102 COR11 PIR1201
PIR1202
COR12
PIR1301
PIR1302 COR13
PIR1401 PIR1402
COR14 PIR1501 PIR1502
COR15 PIR1601 PIR1602
COR16 PIR1701 PIR1702
COR17
PIR1801
PIR1802
COR18
PIR1901
PIR1902 COR19
PIR2001
PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301 PIR2302
COR23
PIR2401 PIR2402
COR24
PIR2501
PIR2502
COR25
PIR2601 PIR2602
COR26 PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28 PIR2901 PIR2902
COR29
PIR3001 PIR3002
COR30 PIR3101 PIR3102
COR31
PIR3201 PIR3202
COR32
PIR3301 PIR3302
COR33
PIR3401
PIR3402 COR34
PIR3501 PIR3502
COR35
PIR3601 PIR3602
COR36
PIR3701 PIR3702
COR37
PIR3801 PIR3802
COR38
PIR3901
PIR3902
COR39
PIR4001 PIR4002
COR40
PIR4101 PIR4102
COR41
PIR4201 PIR4202
COR42
PIR4301 PIR4302
COR43
PIR4401
PIR4402
COR44
PIR4501 PIR4502 COR45
PIR4601 PIR4602 COR46
PIR4701 PIR4702 COR47
PIR4801 PIR4802
COR48
PIR4901
PIR4902 COR49
PIR5001 PIR5002
COR50 PIR5101 PIR5102
COR51
PIR5201 PIR5202
COR52
PIR5301 PIR5302 COR53
PIR5401
PIR5402 COR54
PIR5501 PIR5502
COR55 PIR5601 PIR5602
COR56
PIR5701 PIR5702
COR57
PIR5801 PIR5802
COR58
PIR5901
PIR5902 COR59
PIR6001 PIR6002 COR60
PIR6101 PIR6102 COR61
PIR6201 PIR6202
COR62
PIR6301 PIR6302
COR63
PIR6401
PIR6402
COR64
PIR6501 PIR6502
COR65 PIR6601 PIR6602
COR66
PIR6701 PIR6702
COR67
PIR6801 PIR6802
COR68
PIR6901
PIR6902 COR69
PIR7001 PIR7002
COR70 PIR7101 PIR7102
COR71
PIR7201 PIR7202
COR72
PIR7301 PIR7302 COR73
PIR7401
PIR7402
COR74
PIR7501 PIR7502
COR75 PIR7601 PIR7602
COR76
PIR7701 PIR7702
COR77
PIR7801 PIR7802
COR78 PIR7901 PIR7902
COR79
PIR8001 PIR8002
COR80
PIR8101 PIR8102 COR81 PIR8201 PIR8202 COR82
PIR8301
PIR8302 COR83
PIR8401 PIR8402
COR84
PIR8501 PIR8502
COR85
PIR8601 PIR8602
COR86
PIR8701 PIR8702 COR87
PIR8801
PIR8802
COR88
PIR8901 PIR8902
COR89 PIR9001 PIR9002
COR90
PIR9101 PIR9102
COR91
PIR9201 PIR9202
COR92
PIR9301
PIR9302 COR93
PIR9401 PIR9402 COR94
PIR9501 PIR9502 COR95
PIR9601 PIR9602
COR96
PIR9701 PIR9702
COR97
PIR9801
PIR9802
COR98
PIR9901 PIR9902
COR99 PIR10001 PIR10002
COR100
PIR10101 PIR10102
COR101 PIR10201 PIR10202
COR102
PIR10301 PIR10302
COR103
PIR10401 PIR10402 COR104
PIR10501 PIR10502 COR105
PIR10601 PIR10602
COR106
PIR10701
PIR10702 COR107
PIR10801 PIR10802
COR108 PIR10901 PIR10902
COR109
PIR11001 PIR11002 COR110
PIR11101 PIR11102
COR111
PIR11201
PIR11202 COR112
PIR11301 PIR11302
COR113
PIR11401 PIR11402
COR114
PIR11501 PIR11502
COR115
PIR11601 PIR11602
COR116
PIR11701
PIR11702
COR117
PIR11801 PIR11802
COR118 PIR11901 PIR11902
COR119
PIR12001 PIR12002 COR120
PIR12101 PIR12102
COR121
PIR12201
PIR12202 COR122
PIR12301 PIR12302
COR123 PIR12401 PIR12402
COR124
PIR12501 PIR12502
COR125
PIR12601 PIR12602 COR126
PIR12701
PIR12702 COR127
PIR12801 PIR12802
COR128
PIR12901 PIR12902
COR129
PIR13001 PIR13002
COR130
PIR13101 PIR13102
COR131
PIR13201 PIR13202
COR132
PIR13301 PIR13302
COR133
PIR13401
PIR13402
COR134
PIR13501 PIR13502
COR135 PIR13601 PIR13602
COR136
PIR13701 PIR13702
COR137 PIR13801 PIR13802
COR138
PIR13901 PIR13902 COR139
PIR14001 PIR14002
COR140
PIR14101
PIR14102 COR141
PIR14201 PIR14202
COR142 PIR14301 PIR14302
COR143
PIR14401 PIR14402
COR144
PIR14501 PIR14502 COR145
PIR14601
PIR14602
COR146
PIR14701 PIR14702
COR147 PIR14801 PIR14802
COR148
PIR14901 PIR14902 COR149
PIR15001 PIR15002
COR150
PIR15101
PIR15102 COR151
PIR15201 PIR15202
COR152 PIR15301 PIR15302
COR153
PIR15401 PIR15402
COR154
PIR15501 PIR15502 COR155
PIR15601
PIR15602 COR156
PIR15701 PIR15702
COR157
PIR15801 PIR15802
COR158
PIR15901 PIR15902
COR159
PIR16001 PIR16002
COR160
PIR16101
PIR16102
COR161
PIR16201 PIR16202
COR162 PIR16301 PIR16302
COR163
PIR16401 PIR16402
COR164
PIR16501 PIR16502
COR165
PIR16601
PIR16602 COR166
PIR16701 PIR16702 COR167 PIR16801 PIR16802 COR168
PIR16901 PIR16902
COR169
PIR17001 PIR17002
COR170
PIR17101
PIR17102
COR171
PIR17201 PIR17202 COR172
PIR17301 PIR17302 COR173
PIR17401 PIR17402 COR174
PIR17501 PIR17502 COR175
PIR17601 PIR17602
COR176
PIR17701 PIR17702
COR177
PIR17801 PIR17802
COR178
PIR17901 PIR17902 COR179
PIR18001
PIR18002
COR180
PIR18101 PIR18102
COR181 PIR18201 PIR18202
COR182
PIR18301 PIR18302
COR183
PIR18401 PIR18402
COR184
PIR18501
PIR18502 COR185
PIR18601 PIR18602
COR186 PIR18701 PIR18702
COR187
PIR18801 PIR18802
COR188
PIR18901 PIR18902 COR189
PIR19001
PIR19002 COR190
PIR19101 PIR19102
COR191 PIR19201 PIR19202
COR192
PIR19301 PIR19302
COR193
PIR19401 PIR19402
COR194
PIR19501
PIR19502 COR195
PIR19601 PIR19602
COR196 PIR19701 PIR19702
COR197
PIR19801 PIR19802
COR198
PIR19901 PIR19902
COR199
PIR20001 PIR20002 COR200
PIR20101 PIR20102 COR201
PIR20201 PIR20202 COR202
PIR20301 PIR20302 COR203
PIR20401
PIR20402 COR204
PIR20501 PIR20502
COR205 PIR20601 PIR20602
COR206
PIR20701 PIR20702
COR207
PIR20801 PIR20802
COR208
PIR20901
PIR20902
COR209
PIR21001 PIR21002 COR210 PIR21101 PIR21102 COR211
PIR21201 PIR21202
COR212
PIR21301 PIR21302
COR213
PIR21401
PIR21402
COR214
PIR21501 PIR21502
COR215 PIR21601 PIR21602
COR216
PIR21701 PIR21702
COR217
PIR21801 PIR21802 COR218
PIR21901
PIR21902 COR219
PIR22001 PIR22002 COR220
PIR22101 PIR22102 COR221
PIR22201 PIR22202
COR222
PIR22301 PIR22302
COR223
PIR22401
PIR22402 COR224
PIR22501 PIR22502 COR225
PIR22601 PIR22602
COR226 PIR22701 PIR22702
COR227
PIR22801 PIR22802 COR228 PIR22901
PIR22902
COR229
PIR23001
PIR23002
COR230
PIR23101
PIR23102
COR231
PIR23201
PIR23202 COR232
PIR23301 PIR23302
COR233
PIR23401 PIR23402
COR234 PIR23501 PIR23502
COR235
PIR23601 PIR23602
COR236
PIR23701 PIR23702
COR237
PIR23801 PIR23802 COR238
PIR23901
PIR23902 COR239
PIR24001 PIR24002 COR240 PIR24101 PIR24102 COR241
PIR24201
PIR24202
COR242
PIR24301
PIR24302
COR243
PIR24401
PIR24402
COR244
PIR24501 PIR24502
COR245
PIR24601 PIR24602
COR246
PIR24701 PIR24702
COR247 PIR24801 PIR24802
COR248
PIR24901 PIR24902
COR249
PIR25001 PIR25002 COR250
PIR25101 PIR25102 COR251
PIR25201
PIR25202
COR252
PIR25301 PIR25302
COR253
PIR25401
PIR25402
COR254
PIR25501
PIR25502
COR255
PIR25601
PIR25602 COR256
PIR25701 PIR25702
COR257
PIR25801 PIR25802
COR258
PIR25901 PIR25902
COR259
PIR26001 PIR26002 COR260
PIS101 PIS102
COS1
PIU101 PIU102
PIU103
PIU104 PIU105
PIU106
COU1
PIU2023
PIU2024
PIU2025
PIU2026
PIU2029
PIU2030
PIU2031 PIU2032
PIU2035
PIU2036
PIU2037
PIU2047
PIU2048
PIU2051
PIU2052 PIU2053
PIU2054
PIU2067
PIU2068
PIU2069
PIU2070
PIU2071
PIU2072
PIU2076
PIU2077
PIU2089
PIU2090 PIU2091
PIU2092
PIU2093
PIU2095
PIU2096
COU2A
PIU207
PIU208
PIU209
PIU2015
PIU2016
PIU2017
PIU2018
PIU2033
PIU2034
PIU2055
PIU2056
PIU2057
PIU2058
PIU2059 PIU2060
PIU2061
PIU2062
PIU2063
PIU2064
PIU2065
PIU2066
PIU2078
PIU2079
PIU2080
PIU2081
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
COU2B
PIU201
PIU202
PIU203
PIU204
PIU205 PIU2038
PIU2039
PIU2040
PIU2041
PIU2042
PIU2043
PIU2044
PIU2045
PIU2046
PIU2097
PIU2098
COU2C
PIU2012
PIU2013 PIU2014
PIU2049
PIU2073
PIU2094
COU2D
PIU206
PIU2010
PIU2011
PIU2019
PIU2020
PIU2021
PIU2022
PIU2027
PIU2028
PIU2050
PIU2074 PIU2075
PIU2099 PIU20100
COU2E
PIU301
PIU302
PIU303
PIU304 PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
PIU403 COU4
PIU501
PIU502
PIU503
PIU507
PIU5014 COU5A
PIU504
PIU505
PIU506
COU5B
PIU5011
PIU5012
PIU5013
COU5C
PIU508
PIU509
PIU5010
COU5D
PIU601
PIU602 PIU603
PIU604
COU6
PIU701
PIU702 PIU703
PIU704
COU7
PIU801
PIU802 PIU803
PIU804
COU8
PIU901
PIU902
PIU903
PIU907
PIU9014 COU9A
PIU904
PIU905 PIU906
COU9B
PIU9011
PIU9012
PIU9013
COU9C
PIU908 PIU909
PIU9010
COU9D
PIU1001
PIU1002 PIU1003
PIU1004
COU10
PIU1101
PIU1102 PIU1103
PIU1104
COU11
PIU1201
PIU1202 PIU1203
PIU1204
COU12
PIU1301
PIU1302 PIU1303
PIU1304
COU13
PIU1401
PIU1402 PIU1403
PIU1404
COU14
PIU1501
PIU1502 PIU1503
PIU1504
COU15
PIU1601
PIU1602
PIU1603
PIU1607
PIU16014 COU16A
PIU1604
PIU1605
PIU1606
COU16B
PIU16011
PIU16012
PIU16013
COU16C
PIU1608
PIU1609
PIU16010
COU16D
PIU1701
PIU1702 PIU1703
PIU1704
COU17
PIU1801
PIU1802 PIU1803
PIU1804
COU18
PIU1901
PIU1902 PIU1903
PIU1904
COU19
PIU2001
PIU2002
PIU2003
PIU2007
PIU20014 COU20A
PIU2004
PIU2005
PIU2006
COU20B
PIU20011
PIU20012
PIU20013
COU20C
PIU2008
PIU2009
PIU20010
COU20D
PIU2101
PIU2102 PIU2103
PIU2104
COU21
PIU2201
PIU2202
PIU2203
PIU2207
PIU22014 COU22A
PIU2204
PIU2205
PIU2206
COU22B
PIU22011
PIU22012
PIU22013
COU22C
PIU2208
PIU2209
PIU22010
COU22D
PIU2301
PIU2302 PIU2303
PIU2304
COU23
PIU2401
PIU2402 PIU2403
PIU2404
COU24
PIU2501
PIU2502 PIU2503
PIU2504
COU25
PIU2601
PIU2602
PIU2603
PIU2607
PIU26014 COU26A
PIU2604
PIU2605 PIU2606
COU26B
PIU26011
PIU26012
PIU26013
COU26C
PIU2608
PIU2609
PIU26010
COU26D
PIU2701
PIU2702 PIU2703
PIU2704
COU27
PIU2801
PIU2802 PIU2803
PIU2804
COU28
PIU2901
PIU2902
PIU2903
PIU2907
PIU29014 COU29A
PIU2904
PIU2905
PIU2906
COU29B
PIU29011
PIU29012
PIU29013
COU29C
PIU2908 PIU2909
PIU29010
COU29D
PIU3001
PIU3002 PIU3003
PIU3004
COU30
PIU3101
PIU3102 PIU3103
PIU3104
COU31
PIU3201
PIU3202 PIU3203
PIU3204
COU32
PIU3301
PIU3302
PIU3303
PIU3307
PIU33014 COU33A
PIU3304
PIU3305
PIU3306
COU33B
PIU33011
PIU33012
PIU33013
COU33C
PIU3308
PIU3309
PIU33010
COU33D
PIU3401
PIU3402 PIU3403
PIU3404
COU34
PIU3501
PIU3502 PIU3503
PIU3504
COU35
PIU3601
PIU3602 PIU3603
PIU3604
COU36
PIU3701
PIU3702 PIU3703
PIU3704
COU37
PIU3801
PIU3802 PIU3803
PIU3804
COU38
PIU3901
PIU3902
PIU3903
PIU3907
PIU39014 COU39A
PIU3904
PIU3905
PIU3906
COU39B
PIU39011
PIU39012
PIU39013
COU39C
PIU3908
PIU3909
PIU39010
COU39D
PIU4001
PIU4002 PIU4003
PIU4004
COU40
PIU4101
PIU4102 PIU4103
PIU4104
COU41 PIU4201
PIU4202
PIU4203
PIU4207
PIU42014 COU42A
PIU4204
PIU4205
PIU4206
COU42B
PIU42011
PIU42012
PIU42013
COU42C
PIU4208
PIU4209
PIU42010
COU42D
PIU4301
PIU4302 PIU4303
PIU4304
COU43
PIU4401
PIU4402 PIU4403
PIU4404
COU44
PIU4501
PIU4502 PIU4503
PIU4504
COU45
PIU4601
PIU4602
PIU4603
PIU4607
PIU46014 COU46A
PIU4604
PIU4605
PIU4606
COU46B
PIU46011
PIU46012
PIU46013
COU46C
PIU4608
PIU4609
PIU46010
COU46D
PIU4701
PIU4702 PIU4703
PIU4704
COU47
PIU4801
PIU4802 PIU4803
PIU4804
COU48
PIU4901
PIU4902
PIU4903
PIU4907
PIU49014 COU49A
PIU4904
PIU4905
PIU4906
COU49B
PIU49011
PIU49012
PIU49013
COU49C
PIU4908
PIU4909
PIU49010 COU49D
PIU5001
PIU5002 PIU5003
PIU5004
COU50
PIU5101
PIU5102 PIU5103
PIU5104
COU51
PIU5201
PIU5202 PIU5203
PIU5204
COU52
PIU5301
PIU5302
PIU5303
PIU5307
PIU53014 COU53A
PIU5304
PIU5305
PIU5306
COU53B
PIU53011
PIU53012
PIU53013
COU53C
PIU5308
PIU5309
PIU53010
COU53D
PIU5401
PIU5402
PIU5403
PIU5407
PIU54014 COU54A
PIU5404
PIU5405
PIU5406
COU54B
PIU54011
PIU54012
PIU54013
COU54C
PIU5408
PIU5409
PIU54010
COU54D
PIU5501
PIU5502
PIU5503
PIU5507
PIU55014 COU55A
PIU5504
PIU5505
PIU5506
COU55B
PIU55011
PIU55012
PIU55013
COU55C
PIU5508
PIU5509
PIU55010
COU55D
PIV101
PIV102 PIV103
COV1
PIY101 PIY102
COY1
PIC201
PIC1101 PIC1201 PIC1301 PIC1401 PIC1501 PIC1601
PICN101
PICV201
PIJK101 PIJK201 PIJK301 PIJK401 PIJK501 PIJK601
PIJK701 PIJK801 PIJK901 PIJK1001 PIJK1101 PIJK1201
PIP101
PIP201
PIR102
PIR502
PIR602 PIR702
PIR1201 PIR1302
PIR2301
PIR3201
PIR3701
PIR4201
PIR4701
PIR5201
PIR5701
PIR6201
PIR6701
PIR7201
PIR7701
PIR8601
PIR9101
PIR9601
PIR10301
PIR11001
PIR11501
PIR12001
PIR12501
PIR13001
PIR13901
PIR14401
PIR14901
PIR15401
PIR15901
PIR16401
PIR16901
PIR17801
PIR18301
PIR18801
PIR19301
PIR19801
PIR20701
PIR21201
PIR21701
PIR22201
PIU206
PIU2011
PIU2019
PIU2021
PIU2022
PIU2028
PIU2050
PIU2075
PIU20100
PIU308
PIV102
PIC101
PIC301 PIC401
PICV101
PIL102
PIU104 PIV103
PIC1702 PIC1801
PIC1901
PID302 PID402
PID502 PID602
PIF102
PIJ1301
PIQ703
PIQ803
PIQ903
PIQ1103
PIQ2403 PIQ2503
PIQ2703 PIQ2803
PIQ3603 PIQ3703
PIQ3903 PIQ4003
PIQ4903
PIQ5103 PIQ5203
PIQ5403
PIQ6503 PIQ6603
PIQ6803 PIQ6903
PIQ7703
PIQ7903
PIQ8003
PIQ8103
PIR1801
PIR1902
PIR2102
PIR3002
PIR3502
PIR4002
PIR4502
PIR5002
PIR5502
PIR6002
PIR6502
PIR7002
PIR7502
PIR8402
PIR8902
PIR9402
PIR10102
PIR10802
PIR11302
PIR11802
PIR12302
PIR12802
PIR13702
PIR14202
PIR14702
PIR15202
PIR15702
PIR16202
PIR16702
PIR17602
PIR18102
PIR18602
PIR19102
PIR19602
PIR20502
PIR21002
PIR21502
PIR22002
PIU5014
PIU16014
PIU22014
PIU29014
PIU39014
PIU46014
PIC501 PIJ001
PIU101
PIC2001
PIFB102
PIU403
PIR402 PIU2094 NLBOOT0
PID4601
PIR22602
PIU902
PIU904
PIU5301
PIU5302
NLDA01
PID1002
PID1202
PIR22601 PIR23001
NLDA02
PID4701
PIR22702
PIU9010
PIU9013
PIU5304
PIU5305
NLDB01
PID1102 PID1302
PIR22701 PIR23102
NLDB02
PID4801
PIR22802
PIU2002
PIU2005
PIU53012
PIU53013
NLDC01
PID1702
PID1902
PIR22801
PIR23202
NLDC02
PID4501
PIR22502
PIU2009
PIU20013
PIU5309
PIU53010
NLDD1
PID1802 PID2002
PIR22501 PIR22901
NLDD2
PID5101
PIR24002
PIU2602
PIU2604
PIU5401
PIU5402
NLDE1
PID2502 PID2602
PIR24001
PIR24302
NLDE2
PID5201
PIR24102
PIU26010
PIU26013
PIU5404
PIU5405
NLDF1
PID2302 PID2402
PIR24101
PIR24402
NLDF2
PID5001
PIR23802
PIU3302
PIU3305
PIU54012
PIU54013
NLDG1
PID3002
PID3202
PIR23801
PIR24201
NLDG2
PIC102 PIC202 PIC302 PIC402 PIC502
PIC601
PIC701
PIC801 PIC901 PIC1001
PIC1102 PIC1202 PIC1302 PIC1402 PIC1502 PIC1602
PICN106
PICV102 PICV202 PID101
PID202
PIJ002
PIJK103 PIJK203 PIJK303 PIJK403 PIJK503 PIJK603
PIJK703 PIJK803 PIJK903 PIJK1003 PIJK1103 PIJK1203
PIP104
PIP203
PIQ102 PIQ202 PIQ302 PIQ402
PIR202
PIR301
PIR401
PIS101
PIU103
PIU105
PIU106
PIU2010
PIU2020
PIU2027
PIU2074
PIU2099
PIU301
PIU302
PIU303
PIU304
PIU307
PIV101
PID4901
PIR23702
PIU33010
PIU33013
PIU5409
PIU54010
NLDH1
PID2902 PID3102
PIR23701
PIR23902
NLDH2
PID5601
PIR25302
PIU4202
PIU4205
PIU5501
PIU5502
NLDI1
PID3502 PID3702
PIR25301
PIR25602
NLDI2
PID5401
PIR25002
PIU4209
PIU42013
PIU5504
PIU5505
NLDJ1
PID3602 PID3802
PIR25001 PIR25401
NLDJ2
PID5501
PIR25102
PIU4902
PIU4904
PIU55012
PIU55013
NLDK1
PID4202 PID4402
PIR25101
PIR25502
NLDK2
PID5301
PIR24902
PIU49010
PIU49013
PIU5509
PIU55010
NLDL1
PID4002 PID4302
PIR24901 PIR25202
NLDL2
PIU2051
PIU602
NLENA
PIR2202
PIU502
PIU505
NLENA024
PID902 PIR2402
PIR23401
NLENA0T
PIU2054
PIU1002
NLENB
PIR4102
PIU5010
PIU5013
NLENB024
PID1402 PIR4302
PIR23501
NLENB0T
PIU2057
PIU1302
NLENC
PIR5602
PIU1602
PIU1605
NLENC024
PID1502 PIR5802
PIR23601
NLENC0T
PIU2060
PIU1702
NLEND
PIR7102
PIU1609
PIU16012
NLEND024
PID1602 PIR7302
PIR23301 NLEND0T
PIU2063
PIU2102 NLENE
PIR9002
PIU2201
PIU2204
NLENE024 PID2102 PIR9202
PIR24701
NLENE0T
PIU2066
PIU2502 NLENF
PIR10902
PIU2209
PIU22012
NLENF024
PID2202 PIR11102
PIR24801
NLENF0T
PIU2048
PIU3002 NLENG
PIR12402
PIU2902
PIU2905
NLENG024
PID2702 PIR12602
PIR24601
NLENG0T
PIU2045
PIU3402 NLENH
PIR14302
PIU29010
PIU29013
NLENH024
PID2802 PIR14502
PIR24501
NLENH0T
PIU2042
PIU3702
NLENI
PIR15802
PIU3902
PIU3905
NLENI024
PID3302 PIR16002
PIR26001 NLENI0T
PIU205
PIU4102 NLENJ
PIR17702
PIU3909
PIU39012
NLENJ024
PID3402 PIR17902
PIR25801 NLENJ0T
PIU202
PIU4502 NLENK
PIR19202
PIU4601
PIU4604
NLENK024
PID3902 PIR19402
PIR25901
NLENK0T
PIU2097
PIU5002
NLENL
PIR21102
PIU4609
PIU46012
NLENL024
PID4102 PIR21302
PIR25701 NLENL0T
PIC1902
PIC2102
PIC2202 PIC2302
PIC2402 PIC2502
PIC2601
PIC2702 PIC2802
PIC2902 PIC3002
PIC3101
PIC3302 PIC3402
PIC3502 PIC3602
PIC3701
PIC3802 PIC3902
PIC4002 PIC4102
PIC4201
PIC4302 PIC4402 PIC4502 PIC4602
PIC4701
PIC4902 PIC5002 PIC5102 PIC5202
PIC5301
PID501 PID601
PID701
PID801
PIDS102
PIFB202
PIJ1302
PIQ603
PIQ1002
PIQ1202
PIQ1303 PIQ1402
PIQ1503
PIQ1603
PIQ1702 PIQ1803
PIQ1902
PIQ2002
PIQ2102
PIQ2202
PIQ2302
PIQ2602
PIQ2902
PIQ3002
PIQ3103 PIQ3203
PIQ3303
PIQ3403
PIQ3502
PIQ3802
PIQ4102
PIQ4203
PIQ4302 PIQ4403
PIQ4502
PIQ4603
PIQ4703
PIQ4802
PIQ5002
PIQ5302
PIQ5502
PIQ5603 PIQ5703
PIQ5802
PIQ5903 PIQ6003
PIQ6102
PIQ6202
PIQ6302
PIQ6402
PIQ6702
PIQ7002
PIQ7103 PIQ7203
PIQ7302
PIQ7403 PIQ7503
PIQ7602
PIQ7802
PIQ8202
PIQ8302 PIQ8403
PIQ8503
PIQ8602
PIQ8703
PIQ8803
PIQ8902
PIQ9002
PIR201
PIR2002
PIR2501 PIR2602 PIR2702
PIR2802 PIR2902
PIR3401
PIR3901
PIR4401
PIR4901
PIR5401
PIR5901
PIR6401
PIR6901
PIR7401
PIR7802 PIR7902
PIR8102 PIR8202
PIR8301
PIR8801
PIR9301
PIR9801 PIR9902 PIR10002
PIR10402 PIR10502
PIR10701
PIR11201
PIR11701
PIR12201
PIR12701
PIR13102 PIR13202
PIR13401
PIR13502 PIR13602
PIR14101
PIR14601
PIR15101
PIR15601
PIR16101
PIR16601
PIR17101
PIR17202 PIR17302 PIR17402 PIR17502
PIR18001
PIR18501
PIR19001
PIR19501
PIR20002 PIR20102 PIR20202 PIR20302
PIR20401
PIR20901
PIR21401
PIR21901
PIR22401
PIR22902
PIR23002 PIR23101
PIR23201
PIR23901
PIR24202
PIR24301 PIR24401
PIR25201
PIR25402
PIR25501
PIR25601
PIU907
PIU2007
PIU2607
PIU3307
PIU4207
PIU4907
PIU5307
PIU5407
PIU5507
PIC2002
PIFB201 PIU401
PIC1701 PIC1802
PID401
PIQ602
PIU507
PIU1607
PIU2207
PIU2907
PIU3907
PIU4607
PIU2052
PIU702
NLIN1
PIR3102
PIU501
NLIN1024
PID1201
PIR3302
PIR3402 PIU703
PIU901 NLIN10T
PIU2053
PIU802
NLIN2
PIR3602
PIU504
NLIN2024
PID1001
PIR3802 PIR3902 PIU803
PIU905 NLIN20T
PIU2055
PIU1102
NLIN3
PIR4602
PIU509 NLIN3024
PID1301
PIR4801
PIR4902
PIU909
PIU1103
NLIN30T
PIU2056
PIU1202
NLIN4
PIR5102
PIU5012 NLIN4024
PID1101
PIR5301
PIR5402
PIU9012
PIU1203
NLIN40T
PIU2058
PIU1402
NLIN5
PIR6102
PIU1601
NLIN5024
PID1901
PIR6301 PIR6402 PIU1403
PIU2001 NLIN50T
PIU2059
PIU1502
NLIN6
PIR6602
PIU1604
NLIN6024
PID1701
PIR6801
PIR6902 PIU1503
PIU2004 NLIN60T
PIU2061
PIU1802
NLIN7
PIR7602
PIU16010 NLIN7024
PID2001 PIR8002
PIR8302 PIU1803
PIU20010
NLIN70T
PIU2062
PIU1902
NLIN8
PIR8502
PIU16013 NLIN8024
PID1801
PIR8702 PIR8802
PIU1903
PIU20012 NLIN80T
PIU2064
PIU2302
NLIN9
PIR9502
PIU2202
NLIN9024
PID2601
PIR9701 PIR9802 PIU2303
PIU2601 NLIN90T
PIU2065
PIU2402 NLIN10
PIR10202
PIU2205
NLIN10024
PID2501
PIR10601
PIR10702 PIU2403
PIU2605 NLIN100T
PIU2070
PIU2702
NLIN11
PIR11402
PIU22010 NLIN11024
PID2401
PIR11601 PIR11702
PIU2609
PIU2703
NLIN110T
PIU2071
PIU2802 NLIN12
PIR11902
PIU22013 NLIN12024
PID2301
PIR12101
PIR12202
PIU26012
PIU2803
NLIN120T
PIU2047
PIU3102
NLIN13
PIR12902
PIU2901
NLIN13024
PID3201
PIR13302 PIR13402 PIU3103
PIU3301
NLIN130T
PIU2046
PIU3202
NLIN14
PIR13802
PIU2904
NLIN14024
PID3001
PIR14002
PIR14102 PIU3203
PIU3304
NLIN140T
PIU2044
PIU3502
NLIN15
PIR14802
PIU2909 NLIN15024
PID3101 PIR15001
PIR15102 PIU33012 PIU3503
NLIN150T
PIU2043
PIU3602 NLIN16
PIR15302
PIU29012 NLIN16024
PID2901
PIR15501
PIR15602
PIU3309
PIU3603
NLIN160T
PIU2041
PIU3802 NLIN17
PIR16302
PIU3901 NLIN17024
PID3701
PIR16501
PIR16602 PIU3803
PIU4201 NLIN170T
PIU2040
PIU4002
NLIN18
PIR16802
PIU3904
NLIN18024
PID3501
PIR17001 PIR17102 PIU4003
PIU4204 NLIN180T
PIU204
PIU4302 NLIN19
PIR18202
PIU39010 NLIN19024
PID3801
PIR18402
PIR18502
PIU42010
PIU4303
NLIN190T
PIU203
PIU4402 NLIN20
PIR18702
PIU39013
NLIN20024
PID3601
PIR18902
PIR19002
PIU42012
PIU4403
NLIN200T
PIU201
PIU4702 NLIN21
PIR19702
PIU4602
NLIN21024
PID4401
PIR19901
PIR20402 PIU4703
PIU4901 NLIN210T
PIU2098
PIU4802
NLIN22
PIR20602
PIU4605
NLIN22024
PID4201
PIR20801 PIR20902 PIU4803
PIU4905 NLIN220T
PIU2096
PIU5102 NLIN23
PIR21602
PIU46010 NLIN23024
PID4301
PIR21801 PIR21902
PIU4909
PIU5103
NLIN230T
PIU2095
PIU5202
NLIN24
PIR22102
PIU46013 NLIN24024
PID4001
PIR22301
PIR22402
PIU49012
PIU5203
NLIN240T
PIR1401
PIU2081
NLLED1
PICN102
PIR1002
NLLED10OUT
PIR1501
PIU2080
NLLED2
PICN103
PIR1102
NLLED20OUT
PIR1601
PIU2079
NLLED3 PICN104
PIR802
NLLED30OUT
PIR1701
PIU2078
NLLED4 PICN105
PIR902
NLLED40OUT
PIJK102
PIU2023
NLM1
PIJK202
PIU2024
NLM2
PIJK302
PIU2025
NLM3
PIJK402
PIU2026 NLM4
PIJK502
PIU2029 NLM5
PIJK602
PIU2030
NLM6
PIJK702
PIU2031 NLM7
PIJK802
PIU2032 NLM8
PIJK902
PIU2035 NLM9
PIJK1002
PIU2036 NLM10
PIJK1102
PIU2015
NLM11 PIJK1202
PIU2016
NLM12
PIC2401
PIJ101
PIQ1102
PIQ1302
PIR2801
NLMOTOR0100
PIC2501
PIJ102
PIQ802
PIQ1602
PIR2901
NLMOTOR0100
PIC2201
PIJ201
PIQ902
PIQ1502
PIR2601
NLMOTOR0200
PIC2301
PIJ202
PIQ702
PIQ1802
PIR2701
NLMOTOR0200
PIC2701
PIJ301
PIQ2702
PIQ3102
PIR7801
NLMOTOR0300
PIC2801
PIJ302
PIQ2402
PIQ3302
PIR7901
NLMOTOR0300
PIC2901
PIJ401
PIQ2802
PIQ3202
PIR8101
NLMOTOR0400
PIC3001
PIJ402
PIQ2502
PIQ3402
PIR8201
NLMOTOR0400
PIC3501
PIJ501
PIQ3902
PIQ4402
PIR10401
NLMOTOR0500
PIC3601
PIJ502
PIQ3602
PIQ4702
PIR10501
NLMOTOR0500
PIC3301
PIJ601
PIQ4002
PIQ4202
PIR9901
NLMOTOR0600
PIC3401
PIJ602
PIQ3702
PIQ4602
PIR10001
NLMOTOR0600
PIC4001
PIJ701
PIQ5402
PIQ5702
PIR13501
NLMOTOR0700
PIC4101
PIJ702
PIQ5102
PIQ6002
PIR13601
NLMOTOR0700
PIC3801
PIJ801
PIQ5202
PIQ5602
PIR13101
NLMOTOR0800
PIC3901
PIJ802 PIQ4902
PIQ5902
PIR13201
NLMOTOR0800
PIC4301
PIJ901
PIQ6802
PIQ7102
PIR17201
NLMOTOR0900
PIC4401
PIJ902
PIQ6502
PIQ7402
PIR17301
NLMOTOR0900
PIC4501
PIJ1001
PIQ6902
PIQ7202
PIR17401
NLMOTOR01000
PIC4601
PIJ1002
PIQ6602
PIQ7502
PIR17501
NLMOTOR01000
PIC4901
PIJ1101
PIQ8002
PIQ8502
PIR20001
NLMOTOR01100
PIC5001
PIJ1102
PIQ7702
PIQ8802
PIR20101
NLMOTOR01100
PIC5101
PIJ1201
PIQ8102
PIQ8402
PIR20201
NLMOTOR01200
PIC5201
PIJ1202
PIQ7902
PIQ8702
PIR20301
NLMOTOR01200
PIC602 PIU2049
PIC702 PIU2073
PID102
PIL101 PIU102
PID201 PIR101
PID301
PIQ601 PIR2001
PID702 PIQ501
PIR1901
PID901 PIR2502 PIU603
PID1401 PIR4402 PIU1003
PID1501
PIR5902 PIU1303
PID1601
PIR7402 PIU1703
PID2101
PIR9302 PIU2103
PID2201
PIR11202 PIU2503
PID2701
PIR12702 PIU3003
PID2801 PIR14602
PIU3403
PID3301 PIR16102 PIU3703
PID3401 PIR18002
PIU4103
PID3901
PIR19502 PIU4503
PID4101 PIR21402 PIU5003
PIDS101 PIR1802
PIF101
PIQ502
PIQ101 PIR1402
PIQ103 PIR1001
PIQ201 PIR1502
PIQ203 PIR1101
PIQ301 PIR1602
PIQ303
PIR801
PIQ401 PIR1702
PIQ403
PIR901
PIQ701 PIU508
PIQ801 PIU503
PIQ901 PIU5011
PIQ1001 PIR2401
PIQ1003 PIR2101 PIR2201
PIQ1101 PIU506
PIQ1201 PIR3301
PIQ1203 PIR3001 PIR3101
PIQ1301 PIU906 PIQ1401 PIR3801
PIQ1403 PIR3501 PIR3601
PIQ1601 PIU903
PIQ1701 PIR4301
PIQ1703 PIR4001 PIR4101
PIQ1801 PIU908
PIQ1901 PIR4802
PIQ1903 PIR4501 PIR4601
PIQ2001 PIR5302
PIQ2003 PIR5001 PIR5101
PIQ2101 PIR5801
PIQ2103 PIR5501 PIR5601
PIQ2201 PIR6302
PIQ2203 PIR6001 PIR6101
PIQ2301 PIR6802
PIQ2303 PIR6501 PIR6601
PIQ2401 PIU1603
PIQ2501 PIU1608
PIQ2601 PIR7301
PIQ2603 PIR7001 PIR7101
PIQ2701 PIU1606
PIQ2801 PIU16011
PIQ2901 PIR8001
PIQ2903 PIR7501 PIR7601
PIQ3001 PIR8701
PIQ3003 PIR8401 PIR8501
PIQ3101 PIU2006
PIQ3201 PIU20011
PIQ3301 PIU2003
PIQ3401 PIU2008
PIQ3501 PIR9201
PIQ3503 PIR8901 PIR9001
PIQ3601 PIU2203 PIQ3701 PIU2208
PIQ3801 PIR9702
PIQ3803 PIR9401 PIR9501
PIQ3901 PIU2206 PIQ4001 PIU22011
PIQ4101 PIR10602
PIQ4103 PIR10101 PIR10201
PIQ4201 PIU26011
PIQ4301 PIR11101
PIQ4303 PIR10801 PIR10901
PIQ4401 PIU2606
PIQ4501 PIR11602
PIQ4503 PIR11301 PIR11401
PIQ4601 PIU2608
PIQ4701 PIU2603
PIQ4801 PIR12102
PIQ4803 PIR11801 PIR11901
PIQ4901 PIU2908 PIQ5001 PIR12601
PIQ5003 PIR12301 PIR12401
PIQ5101 PIU2903 PIQ5201 PIU29011
PIQ5301 PIR13301
PIQ5303 PIR12801 PIR12901
PIQ5401 PIU2906
PIQ5501 PIR14001
PIQ5503 PIR13701 PIR13801
PIQ5601 PIU3308
PIQ5701 PIU3306
PIQ5801 PIR14501
PIQ5803 PIR14201 PIR14301
PIQ5901 PIU33011
PIQ6001 PIU3303
PIQ6101 PIR15002
PIQ6103 PIR14701 PIR14801
PIQ6201 PIR15502
PIQ6203 PIR15201 PIR15301
PIQ6301 PIR16001
PIQ6303 PIR15701 PIR15801
PIQ6401 PIR16502
PIQ6403 PIR16201 PIR16301
PIQ6501 PIU3903 PIQ6601 PIU3908
PIQ6701 PIR17002
PIQ6703 PIR16701 PIR16801
PIQ6801 PIU3906 PIQ6901 PIU39011
PIQ7001 PIR17901
PIQ7003 PIR17601 PIR17701
PIQ7101 PIU4206 PIQ7201 PIU42011
PIQ7301 PIR18401
PIQ7303 PIR18101 PIR18201
PIQ7401 PIU4203 PIQ7501 PIU4208
PIQ7601 PIR18901
PIQ7603 PIR18601 PIR18701
PIQ7701 PIU4603
PIQ7801 PIR19401
PIQ7803 PIR19101 PIR19201
PIQ7901 PIU4608
PIQ8001 PIU4606
PIQ8101 PIU46011
PIQ8201 PIR19902
PIQ8203 PIR19601 PIR19701
PIQ8301 PIR20802
PIQ8303 PIR20501 PIR20601
PIQ8401 PIU49011
PIQ8501 PIU4906
PIQ8601 PIR21301
PIQ8603 PIR21001 PIR21101
PIQ8701 PIU4908
PIQ8801 PIU4903
PIQ8901 PIR21802
PIQ8903 PIR21501 PIR21601
PIQ9001 PIR22302
PIQ9003 PIR22001 PIR22101
PIR302 PIU2037
PIR2302 PIU601
PIR3202 PIU701
PIR3702 PIU801
PIR4202 PIU1001
PIR4702 PIU1101
PIR5202 PIU1201
PIR5702 PIU1301
PIR6202 PIU1401
PIR6702 PIU1501
PIR7202 PIU1701
PIR7702 PIU1801
PIR8602 PIU1901
PIR9102 PIU2101
PIR9602 PIU2301
PIR10302 PIU2401
PIR11002 PIU2501
PIR11502 PIU2701
PIR12002 PIU2801
PIR12502 PIU3001
PIR13002 PIU3101
PIR13902 PIU3201
PIR14402 PIU3401
PIR14902 PIU3501
PIR15402 PIU3601
PIR15902 PIU3701
PIR16402 PIU3801
PIR16902 PIU4001
PIR17802 PIU4101
PIR18302 PIU4301
PIR18802 PIU4401
PIR19302 PIU4501
PIR19802 PIU4701
PIR20702 PIU4801
PIR21202 PIU5001
PIR21702 PIU5101
PIR22202 PIU5201
PIR23302 PIU5308
PIR23402 PIU5303 PIR23502 PIU5306
PIR23602 PIU53011
PIR24502 PIU5408
PIR24602 PIU54011
PIR24702 PIU5403 PIR24802 PIU5406
PIR25702 PIU5508
PIR25802 PIU5506
PIR25902 PIU55011
PIR26002 PIU5503
PIU207
PIU2017
PIU2018
PIU2033
PIU2034
PIU2038
PIU2039
PIU2067
PIU2077
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
PIU2089
PIU2090 PIU2091
PIU208
NLOSC320IN
PIU209 NLOSC320OUT
PIC1002
PIU2012
PIY102
NLOSCIN
PIC902
PIU2013 PIY101 NLOSCOUT
PIC802
PIR501 PIS102
PIU2014
NLR\E\S\E\T\
PID4502
PID4602 PID4702
PID4802
PID4902
PID5002
PID5102 PID5202
PID5302
PID5402
PID5502
PID5602
PIU402
PIR1202
PIU2092
PIU306
NLSCL
PIR1301
PIU2093
PIU305
NLSDA
PIP202
PIR601
PIU2076
NLSWD0CLK
PIP204
PIR701
PIU2072 NLSWD0DAT
PIQ1501 PIU9011
NLU3011
PIP103
PIU2069
NLUART0RX
PIP102
PIU2068
NLUART0TX
PIC2101
PIC2602
PIC3102
PIC3702
PIC4202
PIC4702
PIC5302
PID802
PIFB101
PIQ503
PIU604
PIU704
PIU804
PIU9014
PIU1004
PIU1104
PIU1204
PIU1304
PIU1404
PIU1504
PIU1704
PIU1804
PIU1904
PIU20014
PIU2104
PIU2304
PIU2404
PIU2504
PIU26014
PIU2704
PIU2804
PIU3004
PIU3104
PIU3204
PIU33014
PIU3404
PIU3504
PIU3604
PIU3704
PIU3804
PIU4004
PIU4104
PIU42014
PIU4304
PIU4404
PIU4504
PIU4704
PIU4804
PIU49014
PIU5004
PIU5104
PIU5204
PIU53014
PIU54014
PIU55014
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
Figure 3.7: First version of the motor drive design.
Considering the fact that the compact motor driver is much more convenient to be
applied with lower cost, we finally select the integrated motor drive chip to improve
the previous design.
• Integrated motor drive chip
The improved motor drive using L298N is illustrated in Figure 3.8. When the power
is off, eight freewheeling protection diodes are set as release paths of self-inductive
energy, to prevent the self-inductive voltage from striking through the switching ele-

39
ment. If the output voltage is greater than 24V, redundant current will flow through
diodes to VCC , and thus will protect the subsequent circuits. These diodes are se-
lected as fast recovery Schottky diodes that feature fast response [53]. When the DC
motor is running, high instantaneous voltage will be generated and the diodes are
expected to protect the chip from damage. Additionally, two 1812 fuses are welded
at the circuitry of motor output and served as overcurrent protection.
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
D D
C C
B B
A A
Title
Number RevisionSize
A1
Date: 2020/2/16 Sheet ofFile: D:\UVIC机器狗\..\ motor_controller.SchDocDrawn By:
FB4
VIN1
ON/OFF5
GND3
TAB6
OUT2
U2
LM2596S-5
101
L1
D13SS34
330uF/35VC11
VCC_+5V
GND
1KR6
LED1
GND
104
C12
VCC_+24VVCC_+5V
VCC_+5V
330uF/35VC43
VIN1
VOUT3
2
GND
U3 LM1117-3V3
100nF
C15
100nF
C13
VCC_+3V3R5
0R
330uF/35VC16
VCC_+5V
BOOT0/VPP94
VCAP273
NRST14
PH0/OSC_IN12
PH1/OSC_OUT13
PA0-WKUP/USART4_TX/ADC123_IN023
PA1/USART4_RX/ADC123_IN1/ETH_REF_CLK24
PA2/USART2_TX/ADC123_IN2/ETH_MDIO25
PA3/USART2_RX/OTG_HS_ULPI_D0/ADC123_IN326
PA4/DCMI_HSYNC/OTG_HS_SOF/I2S3_WS/ADC12_IN4/DAC1_OUT29
PA5/SPI1_SCK/OTG_HS_ULPI_CK/ADC12_IN5/DAC2_OUT30
PA6/SPI1_MISO/DCMI_PIXCLK/ADC12_IN631
PA7/SPI1_MOSI/ADC12_IN7/ETH_RX_DV32
PA8/MCO1/I2C3_SCL/OTG_FS_SOF67
PA9/USART1_TX/I2C3_SMBA/DCMI_D0/OTG_FS_VBUS68
PA10/USART1_RX/OTG_FS_ID/DCMI_D169
PA11/CAN1_RX/OTG_FS_DM70
PA12/CAN1_TX/OTG_FS_DP71
PA13/JTMS/SWDIO72
PA14/JTCK/SWCLK76
PA15/JTDI/I2S3_WS77
PB0/OTG_HS_ULPI_D1/ADC12_IN835
PB1/OTG_HS_INTN/ADC12_IN936
PB2/BOOT137
PB3/JTDO/SPI3_SCK/I2S3_CK/SPI1_SCK89
PB4/JNTRST/SPI3_MISO/SPI1_MISO/I2S3ext_SD90
PB5/CAN2_RX/OTG_HS_ULPI_D7/DCMI_D10/I2S3_SD91
PB6/I2C1_SCL/CAN2_TX/OTG_FS_INTN/DCMI_D5/USART1_TX92
PB7/I2C1_SDA/FSMC_NL/DCMI_VSYNC/USART1_RX93
PB8/SDIO_D4/DCMI_D6/OTG_FS_SCL/I2C1_SCL/CAN1_RX95
PB9/I2S2_WS/OTG_FS_SDA/SDIO_D5/DCMI_D7/I2C1_SDA/CAN1_TX96
PB10/SPI2_SCK/I2S2_SCL/USART3_TX/OTG_HS_ULPI_D3/OTG_HS_SCL47
PB11/I2C2_SDA/USART3_RX/ETH_TX_EN48
PB12/I2S2_WS/I2S2_SMBA/CAN2_RX/ETH_TXD051
PB13/SPI2_SCK/I2S2_CK/CAN2_TX/ETH_TXD152
PB14/SPI2_MISO/OTG_HS_DMUSART3_53RTS/I2S2ext_SD53
PB15/SPI2_MOSI/I2S2_SD/OTG_HS_DP54
OTG_HS_ULPI_STP/ADC123_IN10/PC015
ETH_MDC/ADC123_IN11/PC116
SPI2_MISO/OTG_HS_ULPI_DIR/I2S2ext_SD/ADC123_IN12/PC217
SPI2_MOSI/I2S2_SD/OTG_HS_ULPI_NXT/ADC123_IN13/PC318
ETH_RXD0/ADC12_IN14/PC433
ETH_RXD1/ADC12_IN15/PC534
I2S2_MCK/SDIO_D6/USART6_TX/DCMI_D0/PC663
I2S3_MCK/SDIO_D7/USART6_RX/DCMI_D1/PC764
SDIO_D0/DCMI_D2/PC865
I2S_CKIN/MCO2/SDIO_D1/I2C3_SDA/DCMI_D3/PC966
SPI3_SCK/I2S3_CK/UART4_TX/SDIO_D2/USART3_TX/PC1078
UART4_RX/SPI3_MISO/SDIO_D3/DCMI_D4/USART3_RX/I2S3ext_SD/PC1179
UART5_TX/SDIO_CK/DCMI_D9/SPI3_MOSI/I2S3_SD/USART3_CK/PC1280
TAMPER-RTC_AF1/PC137
PC14-OSC32_IN8
PC15-OSC32_OUT9
FSMC_D2/CAN1_RX/PD081
FSMC_D3/CAN1_TX/PD182
UART5_RXSDIO_CMD/DCMI_D11/PD283
FSMC_CLK/USART2_CTS/PD384
FSMC_NOE/USART2_RTS/PD485
FSMC_NWE/USART2_TX/PD586
FSMC_NWAIT/USART2_RX/PD687
FSMC_NE1/FSMC_NCE2/PD788
FSMC_D13/USART3_TX/PD855
FSMC_D14/USART3_RX/PD956
FSMC_D15/USART3_CK/PD10 P P57
FSMC_A16/USART3_CTS/PD1158
FSMC_A17/USART3_RTS/PD1259
FSMC_A18/PD1360
FSMC_D0/PD1461
FSMC_D1/PD1562
FSMC_NBL0/DCMI_D2/PE097
FSMC_NBL1/DCMI_D3/PE198
TRACECLK/FSMC_A23/PE21
TRACED0/FSMC_A19/PE32
TRACED1/FSMC_A20/DCMI_D4/PE43
TRACED2/FSMC_A21/DCMI_D6/PE54
TRACED3/FSMC_A22/DCMI_D7/PE65
FSMC_D4/PE738
FSMC_D5/PE839
FSMC_D6/PE940
FSMC_D7/PE1041
FSMC_D8/PE1142
FSMC_D9/PE1243
FSMC_D10/PE1344
FSMC_D11/PE1445
FSMC_D12/PE1546
VDD_150
VDD_275
VDD_3100
VDD_428
VDD_511
VDDA22
VSSA20
VREF+21
VCAP149
VSS_274
VSS_399
VSS_427
VSS_510
VSSA19
VBAT6
U4
STM32F407VxTx
PE10PE11PE12PE13
PE15
PA8
PA11PA12PA13PA14PA15
PB3PB4PB5PB6PB7
PB9PB10PB11
PB14PB15
CY18M
C27 22pF
C28 22pF
C33
2.2uF
BOOT0
NREST
R26
10K
R810K
C18100nF
RST1
NREST
SWDIOSWCLK
D14
D15
LED1
LED2
LED1LED2
R20
10K
123
456
P7
Header 3X2A
BOOT1
BOOT1 BOOT0
12345
P1
Header 5
12345
P2
Header 5
12345
P3
Header 5
PC14PC15
R9
1K
R11
1K
KEY0
PB2
C32
2.2uF
R231M
C31
2.2uF
VCC_+5V VCC_+3V3
GND
GND
GND
GND
GND
GND
GND
GND
GND
VCC_+3V3VCC_+3V3
VCC_+3V3
VCC_+3V3
VCC_+3V3 VCC_+3V3
VCC_+3V3
C36100nF
C37100nF
C38100nF
C39100nF
C40100nF
C41100nF
C42100nF
GNDGND
GND
VCC_+3V3
12345
P5
Header 5
NREST
SWDIOSWCLK
VCC_+3V3
SW1
SW2
KEY0
KEY1GND
GND
VCC_+3V3
ADC_IN0
ADC_IN1
ADC_IN2ADC_IN3ADC_IN4
ADC_IN5ADC_IN6
ADC_IN7
ADC_IN8
ADC_IN9ADC_IN10
ADC_IN11
TIM1_CH1_PWM
TIM1_CH2_PWM
TIM1_CH4_PWM
PA15
TIM2_CH2_PWM
TIM2_CH3_PWMTIM2_CH4_PWM
TIM3_CH2_PWM
TIM3_CH3_PWMTIM3_CH4_PWM
123
JK1
22HP-10
100
R17
Res2
100
R18
Res2
USART1_TXDUSART1_RXD
1234
P6
VCC_+3V3
GND
USART1_TXDUSART1_RXD
VCC_+3V3
R12
470R
GND
ADC_IN0
123
JK2
22HP-10
VCC_+3V3
R13
470R
GND
123
JK3
22HP-10
VCC_+3V3
R14
470R
GND
123
JK4
22HP-10
VCC_+3V3
R15
470R
GND
123
JK5
22HP-10
VCC_+3V3
R16
470R
GND
123
JK6
22HP-10
VCC_+3V3
R19
470R
GND
123
JK7
22HP-10
VCC_+3V3
R21
470R
GND
123
JK8
22HP-10
VCC_+3V3
R22
470R
GND
123
JK9
22HP-10
VCC_+3V3
R25
470R
GND
123
JK10
22HP-10
VCC_+3V3
R27
470R
GND
123
JK11
22HP-10
VCC_+3V3
R28
470R
GND
123
JK12
22HP-10
VCC_+3V3
R29
470R
GND
ADC_IN1
ADC_IN2
ADC_IN3
ADC_IN4
ADC_IN5
ADC_IN6
ADC_IN7
ADC_IN8
ADC_IN9
ADC_IN10
ADC_IN11
1K
R7
LED2
GNDVCC_+3V3
1 2 3 4 5
6 7 8 91
0 P4Header 5X2A
repeat(MOTORA_INP)
repeat(MOTORA_INN)
repeat(MOTORB_INP)
repeat(MOTORB_INN)
repeat(MOTORA_EN)
repeat(MOTORB_EN)
repeat(MOTOR_OUT_A+)
repeat(MOTOR_OUT_A-)
repeat(MOTOR_OUT_B+)
repeat(MOTOR_OUT_B-)
rep
eat
(VC
C_+
24
V)
rep
eat
(VC
C_
+5
V)
rep
eat
(VC
C_+
3V
3)
rep
eat
(GN
D)
repeat(DR,1,6)driver.SchDoc
VCC_+3V3
VCC_+5V
VCC_+24V
GND
MOTOR_OUT_A+[1..6]MOTOR_OUT_A+
MOTOR_OUT_A-[1..6]MOTOR_OUT_A-
MOTOR_OUT_B+[1..6]MOTOR_OUT_B+
MOTOR_OUT_B-[1..6]MOTOR_OUT_B-
MOTOR_OUT_A+1
MOTOR_OUT_A+2MOTOR_OUT_A+3MOTOR_OUT_A+4MOTOR_OUT_A+5MOTOR_OUT_A+6
MOTOR_OUT_A-1MOTOR_OUT_A-2MOTOR_OUT_A-3MOTOR_OUT_A-4MOTOR_OUT_A-5MOTOR_OUT_A-6
MOTOR_OUT_B+1MOTOR_OUT_B+2MOTOR_OUT_B+3MOTOR_OUT_B+4MOTOR_OUT_B+5MOTOR_OUT_B+6
MOTOR_OUT_B-1MOTOR_OUT_B-2MOTOR_OUT_B-3MOTOR_OUT_B-4MOTOR_OUT_B-5MOTOR_OUT_B-6
MOTOR_OUT_A+1MOTOR_OUT_A-1
MOTOR_OUT_A+2MOTOR_OUT_A-2
MOTOR_OUT_A+3MOTOR_OUT_A-3
MOTOR_OUT_A+4MOTOR_OUT_A-4
MOTOR_OUT_A+5MOTOR_OUT_A-5
MOTOR_OUT_A+6MOTOR_OUT_A-6
MOTOR_OUT_B+1MOTOR_OUT_B-1
MOTOR_OUT_B+2MOTOR_OUT_B-2
MOTOR_OUT_B+3MOTOR_OUT_B-3
MOTOR_OUT_B+4MOTOR_OUT_B-4
MOTOR_OUT_B+5MOTOR_OUT_B-5
MOTOR_OUT_B+6MOTOR_OUT_B-6
MOTORA_INP
MOTORA_INN
MOTORB_INP
MOTORB_INN
MOTORA_EN
MOTORB_EN
MOTORA_INP[1..6]
MOTORA_INN[1..6]
MOTORB_INP[1..6]
MOTORB_INN[1..6]
MOTORA_EN[1..6]
MOTORB_EN[1..6]
MOTORA_INP1
MOTORA_INP2MOTORA_INP3MOTORA_INP4MOTORA_INP5MOTORA_INP6
MOTORA_INN1
MOTORA_INN2MOTORA_INN3MOTORA_INN4MOTORA_INN5MOTORA_INN6
MOTORB_INP1
MOTORB_INP2MOTORB_INP3MOTORB_INP4MOTORB_INP5MOTORB_INP6
MOTORB_INN1
MOTORB_INN2MOTORB_INN3MOTORB_INN4MOTORB_INN5MOTORB_INN6
MOTORA_EN1
MOTORA_EN2MOTORA_EN3MOTORA_EN4MOTORA_EN5MOTORA_EN6
MOTORB_EN1
MOTORB_EN2MOTORB_EN3MOTORB_EN4MOTORB_EN5MOTORB_EN6
MOTORA_EN1
MOTORA_EN2
MOTORA_EN3
MOTORA_EN4
MOTORA_EN5
MOTORA_EN6
MOTORB_EN1
MOTORB_EN2
MOTORB_EN4
MOTORB_EN5
MOTORB_EN6
MOTORA_INP1
MOTORA_INP2
MOTORA_INP3
MOTORA_INP4
MOTORA_INP5
MOTORA_INP6
MOTORA_INN1
MOTORA_INN2
MOTORA_INN3
MOTORA_INN4
MOTORA_INN5
MOTORA_INN6
MOTORB_INP1
MOTORB_INP2
MOTORB_INP3
MOTORB_INP4
MOTORB_INP5
MOTORB_INP6
MOTORB_INN1
MOTORB_INN2
MOTORB_INN3
MOTORB_INN4
MOTORB_INN5
MOTORB_INN6
电机驱动
电机接口
角位移传感器接口陀螺仪模块接口程序运行指示灯启动方式选择复位程序下载
单片机
退耦
预留IO
电源 预留按键
104
C9
1KR10
100nF
C19
GND
100nF
C20
GND
100nF
C21
GND
100nF
C22
GND
100nF
C23
GND
100nF
C24
GND
100nF
C25
GND
100nF
C26
GND
100nF
C29
GND
100nF
C30
GND
100nF
C34
GND
100nF
C35
GND
100nFC10
GND
12
P30
Header 2
VCC_+24V
GND
GND12345
P31
Header 5
VCC_+24V
12
P8
Header 2
12
P9
Header 2
12
P10
Header 2
12
P11
Header 2
12
P12
Header 2
12
P13
Header 2
12
P14
Header 2
12
P15
Header 2
12
P16
Header 2
12
P17
Header 2
12
P18
Header 2
12
P19
Header 2
C44100nF
TIM9_CH2_PWM
TIM11_CH1_PWMTIM10_CH1_PWM
MOTORB_EN3
KEY1
PD7
PD
7PA
15
PC10
PC
10
PC11PC12
PC
11
PC
12
PD0PD1PD2
PD
0
PD
1
PD
2P
A8
PD14
PD
14
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10 PIC1101
PIC1102 COC11
PIC1201
PIC1202 COC12
PIC1301
PIC1302 COC13
PIC1501
PIC1502 COC15 PIC1601
PIC1602 COC16
PIC1801
PIC1802
COC18
PIC1901 PIC1902
COC19
PIC2001 PIC2002
COC20
PIC2101 PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702 COC27
PIC2801 PIC2802 COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3201 PIC3202
COC32
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601
PIC3602 COC36
PIC3701
PIC3702 COC37
PIC3801
PIC3802 COC38
PIC3901
PIC3902 COC39
PIC4001
PIC4002 COC40
PIC4101
PIC4102 COC41
PIC4201
PIC4202 COC42
PIC4301
PIC4302 COC43
PIC4401
PIC4402 COC44
PICY101
PICY102 COCY1
PID1301
PID1302 COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PIJK101
PIJK102
PIJK103
COJK1
PIJK201
PIJK202
PIJK203
COJK2
PIJK301
PIJK302
PIJK303
COJK3
PIJK401
PIJK402
PIJK403
COJK4
PIJK501
PIJK502
PIJK503
COJK5
PIJK601
PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PILED101
PILED102
COLED1
PILED201 PILED202
COLED2
PIP101
PIP102
PIP103
PIP104
PIP105
COP1
PIP201
PIP202
PIP203
PIP204
PIP205
COP2
PIP301
PIP302
PIP303
PIP304
PIP305
COP3
PIP401 PIP402 PIP403 PIP404 PIP405
PIP406 PIP407 PIP408 PIP409 PIP4010 COP4
PIP501
PIP502
PIP503
PIP504
PIP505
COP5
PIP601
PIP602
PIP603
PIP604
COP6
PIP701
PIP702
PIP703
PIP704
PIP705
PIP706
COP7
PIP801
PIP802
COP8
PIP901
PIP902
COP9
PIP1001
PIP1002
COP10
PIP1101
PIP1102
COP11
PIP1201
PIP1202
COP12
PIP1301
PIP1302
COP13
PIP1401
PIP1402
COP14
PIP1501
PIP1502
COP15
PIP1601
PIP1602
COP16
PIP1701
PIP1702
COP17
PIP1801
PIP1802
COP18
PIP1901
PIP1902
COP19
PIP3001
PIP3002
COP30
PIP3101
PIP3102
PIP3103
PIP3104
PIP3105
COP31
PIR501 PIR502
COR5
PIR601
PIR602 COR6
PIR701 PIR702
COR7
PIR801
PIR802 COR8
PIR901 PIR902
COR9
PIR1001
PIR1002 COR10
PIR1101 PIR1102
COR11
PIR1201 PIR1202
COR12
PIR1301 PIR1302
COR13
PIR1401 PIR1402
COR14
PIR1501 PIR1502
COR15
PIR1601 PIR1602
COR16
PIR1701 PIR1702
COR17
PIR1801 PIR1802
COR18
PIR1901 PIR1902
COR19
PIR2001 PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301
PIR2302
COR23
PIR2501 PIR2502
COR25
PIR2601 PIR2602
COR26
PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28
PIR2901 PIR2902
COR29
PIRST101
PIRST102
CORST1
PISW101 PISW102
COSW1
PISW201 PISW202
COSW2
PIU201 PIU202
PIU203
PIU204 PIU205
PIU206
COU2
PIU301
PIU302
PIU303
COU3
PIU401
PIU402
PIU403
PIU404
PIU405
PIU406
PIU407
PIU408
PIU409
PIU4010
PIU4011
PIU4012
PIU4013
PIU4014
PIU4015
PIU4016
PIU4017
PIU4018
PIU4019
PIU4020
PIU4021
PIU4022
PIU4023
PIU4024
PIU4025
PIU4026
PIU4027
PIU4028
PIU4029
PIU4030
PIU4031
PIU4032
PIU4033
PIU4034
PIU4035
PIU4036
PIU4037
PIU4038
PIU4039
PIU4040
PIU4041
PIU4042
PIU4043
PIU4044
PIU4045
PIU4046
PIU4047
PIU4048
PIU4049
PIU4050
PIU4051
PIU4052
PIU4053
PIU4054
PIU4055
PIU4056
PIU4057
PIU4058
PIU4059
PIU4060
PIU4061
PIU4062
PIU4063
PIU4064
PIU4065
PIU4066
PIU4067
PIU4068
PIU4069
PIU4070
PIU4071
PIU4072
PIU4073
PIU4074
PIU4075
PIU4076
PIU4077
PIU4078
PIU4079
PIU4080
PIU4081
PIU4082
PIU4083
PIU4084
PIU4085
PIU4086
PIU4087
PIU4088
PIU4089
PIU4090
PIU4091
PIU4092
PIU4093
PIU4094
PIU4095
PIU4096
PIU4097
PIU4098
PIU4099
PIU40100
COU4
PIR1202
PIU4032
NLADC0IN0
PIR1302
PIU4015
NLADC0IN1
PIR1402
PIU4031
NLADC0IN2
PIR1502
PIU4030
NLADC0IN3
PIR1602
PIU4029
NLADC0IN4
PIR1902
PIU4023
NLADC0IN5
PIR2102
PIU4016
NLADC0IN6
PIR2202
PIU4025
NLADC0IN7
PIR2502
PIU4034
NLADC0IN8
PIR2702
PIU4036
NLADC0IN9
PIR2802
PIU4035
NLADC0IN10
PIR2902
PIU4033
NLADC0IN11
PIP705
PIR2602
NLBOOT0 PIP702
PIR2001
NLBOOT1
PIC1002
PIC1102 PIC1201 PIC1301 PIC1501 PIC1602
PIC1802 PIC1902
PIC2002
PIC2102
PIC2202
PIC2302
PIC2402
PIC2502
PIC2602
PIC2702
PIC2802
PIC2902
PIC3002
PIC3102
PIC3202
PIC3302
PIC3402
PIC3502
PIC3602 PIC3702 PIC3802 PIC3902 PIC4002 PIC4102 PIC4202
PIC4302
PIC4402
PID1301
PIJK103
PIJK203
PIJK303
PIJK403
PIJK503
PIJK603
PIJK703
PIJK803
PIJK903
PIJK1003
PIJK1103
PIJK1203
PILED102
PILED202
PIP301
PIP302
PIP303
PIP304
PIP305
PIP502 PIP604 PIP703 PIP706
PIP3001
PIR1001
PIRST102
PISW202
PIU203 PIU206 PIU302
PIU4010
PIU4020
PIU4027
PIU4074
PIU4099
PISW101
PIU4058
NLKEY0
PISW201
PIU4059
NLKEY1
PID1402
PIU4057
NLLED1
PID1502
PIU4056
NLLED2
PIC901 PIR1002
PIU205 PIC1601
PIR501 PIU303
PIC2701
PICY102 PIR2301
PIU4012
PIC2801 PICY101 PIR2302
PIU4013
PIC3201 PIU4049
PIC3301 PIU4073
PID1302
PIL101 PIU202
PID1401 PIR902
PID1501 PIR1102
PIJK102 PIR1201
PIJK202 PIR1301
PIJK302 PIR1401
PIJK402 PIR1501
PIJK502 PIR1601
PIJK602 PIR1901
PIJK702 PIR2101
PIJK802 PIR2201
PIJK902 PIR2501
PIJK1002 PIR2701
PIJK1102 PIR2801
PIJK1202 PIR2901
PILED101 PIR601
PILED201 PIR701
PIR1702 PIU4068
PIR1802 PIU4069
PIR2601 PIU4094
PIU407
PIU4051
PIU4097
PIC1801 PIP501
PIR801
PIRST101
PIU4014
NLNREST PIP409
PIU4067
NLPA8
PIU4071
NLPA12
PIP402
PIU4077
NLPA15
PIR2002 PIU4037 NLPB2
PIU4089
NLPB3 NLTIM20CH20PWM
PIU4090 NLPB4
PIU4091 NLPB5
PIU4092
NLPB6
PIU4093 NLPB7
PIP403
PIU4078
NLPC10
PIP406
PIU4079
NLPC11
PIP404
PIU4080
NLPC12
PIU408 NLPC14
PIU409 NLPC15
PIP407
PIU4081
NLPD0
PIP405
PIU4082
NLPD1
PIP408
PIU4083
NLPD2
PIP401
PIU4088
NLPD7
PIP4010
PIU4061
NLPD14
PIU4041
NLPE10
PIU4046 NLPE15
PIP503
PIU4076 NLPA14
NLSWCLK PIP504
PIU4072 NLPA13
NLSWDIO
PIP603
PIR1801
NLUSART10RXD PIP602
PIR1701
NLUSART10TXD PIC1001 PIC1502
PIC1901
PIC2001
PIC2101
PIC2201
PIC2301
PIC2401
PIC2501
PIC2601
PIC2901
PIC3001
PIC3101
PIC3401
PIC3501
PIC3601 PIC3701 PIC3801 PIC3901 PIC4001 PIC4101 PIC4201 PIC4401
PIJK101
PIJK201
PIJK301
PIJK401
PIJK501
PIJK601
PIJK701
PIJK801
PIJK901
PIJK1001
PIJK1101
PIJK1201
PIP201
PIP202
PIP203
PIP204
PIP205
PIP505 PIP601
PIP701 PIP704
PIR502
PIR702
PIR802
PIR901
PIR1101
PISW102
PIU406
PIU4011
PIU4019
PIU4021
PIU4022
PIU4028
PIU4050
PIU4075
PIU40100
PIC1202
PIC1302 PIC4301
PIL102
PIP101
PIP102
PIP103
PIP104
PIP105
PIR602
PIU204
PIU301 PIC902 PIC1101
PIP3002 PIP3101
PIP3102
PIP3103
PIP3104
PIP3105
PIU201
PIP801
NLMOTOR0OUT0A0010060
NLMOTOR0OUT0A01
NLMOTOR0OUT0A0
PIP901
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A02
PIP1001
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A03
PIP1101
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A04
PIP1201
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A05
PIP1301
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A06
PIP802
NLMOTOR0OUT0A0010060
NLMOTOR0OUT0A01
NLMOTOR0OUT0A0
PIP902
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A02
PIP1002
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A03
PIP1102
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A04
PIP1202
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A05
PIP1302
NLMOTOR0OUT0A0010060 NLMOTOR0OUT0A0
NLMOTOR0OUT0A06
PIP1401
NLMOTOR0OUT0B0010060
NLMOTOR0OUT0B01
NLMOTOR0OUT0B0
PIP1501
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B02
PIP1601
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B03
PIP1701
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B04
PIP1801
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B05
PIP1901
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B06
PIP1402
NLMOTOR0OUT0B0010060
NLMOTOR0OUT0B01
NLMOTOR0OUT0B0
PIP1502
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B02
PIP1602
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B03
PIP1702
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B04
PIP1802
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B05
PIP1902
NLMOTOR0OUT0B0010060 NLMOTOR0OUT0B0
NLMOTOR0OUT0B06
PIU4096
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN1
NLPB9 NLTIM110CH10PWM
PIU4070
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN2
NLPA11
PIU4060
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN3
PIU4040
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN4
NLTIM10CH10PWM
PIU4026
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN5
PIU4047
NLMOTORA0EN010060 NLMOTORA0EN
NLMOTORA0EN6
NLPB10 NLTIM20CH30PWM
PIU402
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN1
PIU4085
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN2
PIU4063
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN3
PIU4018
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN4
PIU4039
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN5
PIU4053
NLMOTORA0INN010060 NLMOTORA0INN
NLMOTORA0INN6
NLPB14
PIU401
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP1
PIU4084
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP2
PIU4062
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP3
PIU4017
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP4
PIU4038
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP5
PIU4052
NLMOTORA0INP010060 NLMOTORA0INP
NLMOTORA0INP6
PIU405
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN1
NLTIM90CH20PWM
PIU4095
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN2 NLTIM100CH10PWM
PIU4066
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN3
NLTIM30CH40PWM
PIU4042
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN4
NLPE11 NLTIM10CH20PWM
PIU4045
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN5
NLTIM10CH40PWM
PIU4048
NLMOTORB0EN010060 NLMOTORB0EN
NLMOTORB0EN6
NLPB11 NLTIM20CH40PWM
PIU404
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN1
PIU4087
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN2
PIU4065
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN3
NLTIM30CH30PWM
PIU4098
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN4
PIU4044
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN5
NLPE13
PIU4055
NLMOTORB0INN010060 NLMOTORB0INN
NLMOTORB0INN6
PIU403
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP1
PIU4086
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP2
PIU4064
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP3
NLTIM30CH20PWM
PIU4024
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP4
PIU4043
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP5
NLPE12
PIU4054
NLMOTORB0INP010060 NLMOTORB0INP
NLMOTORB0INP6
NLPB15
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title
Number RevisionSize
A4
Date: 2020/2/16 Sheet ofFile: D:\UVIC机器狗\..\driver.SchDoc Drawn By:
IN15
IN27
IN310
IN412
EA6
EB11
GND8
VS4
LOG9
OUT12
OUT23
OUT313
OUT414
SEA1
SEB15
U1
L298
IN1IN2IN3IN4
D6 D7
D9
D8
D12
D5
D10 D11
GND
GND
GND
VCC_+24V
VCC_+24VGND
VCC_+5V16v22uf 1210C8
MOTORA_ENMOTORB_EN
MOTORA_INPMOTORA_INN
MOTOR_OUT_A+MOTOR_OUT_A-MOTOR_OUT_B+
MOTOR_OUT_B-
VCC_+3V3
GND
GND
VCC_+5V
VCC_+5V
VCC_+24V
VCC_+24V
VCC_+3V3
MOTORB_INPMOTORB_INN
100nF
C1
100nFC7 1uF
C31uFC4
1uFC5
1uFC6
GND
每个半桥上分配一个电容
D1
1K
R1
D2
1K
R2
D4
1K
R3
D3
1K
R4
VCC_+3V3
IN1
IN2
IN3
IN4
330uF/35V
C2
1KR30
1KR31
F1
FUSE1 1A 1812F2
FUSE1 1A 1812
D17
20kR32
D16
D19
D18 20kR33
PIC101 PIC102
COC1
PIC201 PIC202
COC2
PIC301
PIC302
COC3
PIC401
PIC402
COC4
PIC501
PIC502
COC5
PIC601
PIC602
COC6 PIC701
PIC702
COC7
PIC801
PIC802 COC8
PID101 PID102
COD1
PID201 PID202
COD2
PID301 PID302
COD3
PID401 PID402
COD4
PID501
PID502 COD5
PID601
PID602 COD6
PID701
PID702 COD7
PID801
PID802 COD8
PID901
PID902 COD9
PID1001
PID1002 COD10
PID1101
PID1102 COD11
PID1201
PID1202
COD12
PID1601 PID1602
COD16
PID1701 PID1702
COD17
PID1801 PID1802
COD18
PID1901 PID1902
COD19
PIF101 PIF102
COF1
PIF201 PIF202
COF2
PIR101 PIR102
COR1
PIR201 PIR202
COR2
PIR301 PIR302
COR3
PIR401 PIR402
COR4
PIR3001
PIR3002
COR30
PIR3101
PIR3102
COR31
PIR3201
PIR3202
COR32
PIR3301
PIR3302
COR33
PIU101
PIU102
PIU103
PIU104 PIU105
PIU106
PIU107
PIU108
PIU109
PIU1010
PIU1011
PIU1012
PIU1013
PIU1014
PIU1015
COU1
PIC102
PIC202
PIC302 PIC402 PIC502 PIC602 PIC701 PIC802
PID901 PID1001 PID1101 PID1201 PIR3002 PIR3102
PIU101
PIU108 PIU1015
PID102
PIU105
NLIN1
POMOTORA0INP
PID202
PIU107
NLIN2
POMOTORA0INN
PID402
PIU1010
NLIN3
POMOTORB0INP
PID302
PIU1012
NLIN4
POMOTORB0INN
POGND
PID101 PIR102
PID201 PIR202
PID301 PIR402
PID401 PIR302
PID501
PID1002
PIU1013 POMOTOR0OUT0B0
PID601
PID1202
PID1601
PID1702
PIF101 PIU102
PID701
PID902
PIU103 POMOTOR0OUT0A0
PID801
PID1102
PID1801
PID1902
PIF201 PIU1014
PID1602
PID1701
PIR3201
PID1802
PID1901
PIR3302
PIF102
PIR3202
POMOTOR0OUT0A0
PIF202
PIR3301
POMOTOR0OUT0B0
PIR3001
PIU1011 POMOTORB0EN
PIR3101
PIU106 POMOTORA0EN
PIR101
PIR201
PIR301
PIR401 POVCC003V3
PIC702 PIC801 PIU109
POVCC005V
PIC101
PIC201
PIC301 PIC401 PIC501 PIC601 PID502 PID602 PID702 PID802 PIU104
POVCC0024V
POGND
POMOTOR0OUT0A0
POMOTOR0OUT0B0 POMOTORA0EN
POMOTORA0INN
POMOTORA0INP
POMOTORB0EN
POMOTORB0INN
POMOTORB0INP
POVCC003V3
POVCC005V
POVCC0024V
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.8: Second version of the motor drive design.

40
3.3.4 Voltage Regulation
Originally, the LM2575D2T switching regulator and AMS1117 LDO are utilized. In
the experiment testing, however, the regulated output voltages, supposed to be around
5V and 3.3V, are measured about 4.2V and 2.9V with obvious oscillation, which came
from the high frequency switching noise. The first version of voltage regulation design
is shown in Figure 3.9.
机器狗
DGND
330uH
L1
DGND
100uF/50VC5 D1
1N5819330uF/16V
C3
+5V
C4
104
GND3
OUT 2VIN1
FB4
ON/OFF5
GND6
U1
LM2575D2T-5
转 电路
++
+24VD
存储模块
下载接口
用于接外部指示灯
自恢复保险丝印字
PIC101
PIC102
COC1 PIC201
PIC202
COC2
PIC301
PIC302
COC3 PIC401
PIC402
COC4 PIC501
PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIC801
PIC802
COC8
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10
PIC1101 PIC1102
COC11 PIC1201 PIC1202
COC12 PIC1301 PIC1302 COC13
PIC1401 PIC1402
COC14 PIC1501 PIC1502 COC15
PIC1601 PIC1602 COC16
PIC1701
PIC1702 COC17
PIC1801
PIC1802
COC18
PIC1901
PIC1902
COC19
PIC2001
PIC2002 COC20
PIC2101
PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702
COC27
PIC2801 PIC2802
COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601 PIC3602
COC36
PIC3701 PIC3702
COC37
PIC3801 PIC3802
COC38
PIC3901 PIC3902
COC39
PIC4001 PIC4002
COC40
PIC4101 PIC4102
COC41
PIC4201 PIC4202
COC42
PIC4301 PIC4302
COC43
PIC4401 PIC4402
COC44
PIC4501 PIC4502
COC45
PIC4601 PIC4602
COC46
PIC4701 PIC4702
COC47
PIC4901 PIC4902
COC49
PIC5001 PIC5002
COC50
PIC5101 PIC5102
COC51
PIC5201 PIC5202
COC52
PIC5301 PIC5302
COC53
PICN101 PICN102
PICN103
PICN104
PICN105
PICN106
COCN1
PICV101
PICV102
COCV1 PICV201
PICV202
COCV2
PID101
PID102 COD1
PID201
PID202 COD2
PID301
PID302 COD3
PID401
PID402 COD4
PID501
PID502
COD5
PID601
PID602
COD6
PID701
PID702 COD7
PID801
PID802 COD8
PID901 PID902
COD9
PID1001
PID1002
COD10
PID1101
PID1102
COD11
PID1201
PID1202 COD12
PID1301
PID1302
COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PID1601 PID1602
COD16
PID1701
PID1702
COD17
PID1801
PID1802
COD18
PID1901
PID1902 COD19
PID2001
PID2002 COD20
PID2101 PID2102
COD21
PID2201 PID2202
COD22
PID2301
PID2302
COD23
PID2401
PID2402
COD24
PID2501
PID2502
COD25
PID2601
PID2602 COD26
PID2701 PID2702
COD27
PID2801 PID2802
COD28
PID2901
PID2902
COD29
PID3001
PID3002
COD30
PID3101
PID3102 COD31
PID3201
PID3202 COD32
PID3301 PID3302
COD33
PID3401 PID3402
COD34
PID3501
PID3502
COD35 PID3601
PID3602
COD36
PID3701
PID3702 COD37
PID3801
PID3802 COD38
PID3901 PID3902
COD39
PID4001
PID4002
COD40
PID4101 PID4102
COD41
PID4201
PID4202
COD42
PID4301
PID4302 COD43
PID4401
PID4402 COD44
PID4501 PID4502
COD45
PID4601 PID4602
COD46
PID4701 PID4702
COD47
PID4801 PID4802
COD48
PID4901 PID4902
COD49
PID5001 PID5002
COD50
PID5101 PID5102
COD51
PID5201 PID5202
COD52
PID5301 PID5302
COD53
PID5401 PID5402
COD54
PID5501 PID5502
COD55
PID5601 PID5602
COD56
PIDS101
PIDS102 CODS1
PIF101
PIF102 COF1
PIFB101 PIFB102
COFB1
PIFB201 PIFB202
COFB2
PIJ001 PIJ002
COJ0
PIJ101
PIJ102
COJ1
PIJ201
PIJ202
COJ2
PIJ301
PIJ302
COJ3
PIJ401
PIJ402
COJ4
PIJ501
PIJ502
COJ5
PIJ601
PIJ602
COJ6
PIJ701
PIJ702
COJ7 PIJ801
PIJ802
COJ8
PIJ901
PIJ902
COJ9
PIJ1001
PIJ1002
COJ10
PIJ1101
PIJ1102
COJ11
PIJ1201
PIJ1202
COJ12
PIJ1301
PIJ1302
COJ13
PIJK101 PIJK102
PIJK103
COJK1
PIJK201 PIJK202
PIJK203
COJK2
PIJK301 PIJK302
PIJK303
COJK3
PIJK401 PIJK402
PIJK403
COJK4
PIJK501 PIJK502
PIJK503
COJK5
PIJK601 PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PIP101
PIP102
PIP103
PIP104
COP1
PIP201
PIP202
PIP203 PIP204
COP2
PIQ101
PIQ102
PIQ103 COQ1
PIQ201
PIQ202
PIQ203 COQ2
PIQ301
PIQ302
PIQ303 COQ3
PIQ401
PIQ402
PIQ403 COQ4
PIQ501
PIQ502
PIQ503
COQ5
PIQ601
PIQ602
PIQ603
COQ6
PIQ701
PIQ702
PIQ703 COQ7
PIQ801
PIQ802
PIQ803 COQ8
PIQ901
PIQ902
PIQ903 COQ9
PIQ1001
PIQ1002
PIQ1003 COQ10
PIQ1101
PIQ1102
PIQ1103 COQ11
PIQ1201
PIQ1202
PIQ1203
COQ12
PIQ1301
PIQ1302
PIQ1303
COQ13
PIQ1401
PIQ1402
PIQ1403 COQ14
PIQ1501
PIQ1502
PIQ1503
COQ15
PIQ1601
PIQ1602
PIQ1603
COQ16
PIQ1701
PIQ1702
PIQ1703 COQ17
PIQ1801
PIQ1802
PIQ1803
COQ18
PIQ1901
PIQ1902
PIQ1903 COQ19
PIQ2001
PIQ2002
PIQ2003 COQ20
PIQ2101
PIQ2102
PIQ2103 COQ21
PIQ2201
PIQ2202
PIQ2203 COQ22
PIQ2301
PIQ2302
PIQ2303 COQ23
PIQ2401
PIQ2402
PIQ2403 COQ24
PIQ2501
PIQ2502
PIQ2503 COQ25
PIQ2601
PIQ2602
PIQ2603 COQ26
PIQ2701
PIQ2702
PIQ2703 COQ27
PIQ2801
PIQ2802
PIQ2803 COQ28
PIQ2901
PIQ2902
PIQ2903
COQ29
PIQ3001
PIQ3002
PIQ3003 COQ30
PIQ3101
PIQ3102
PIQ3103
COQ31
PIQ3201
PIQ3202
PIQ3203
COQ32
PIQ3301
PIQ3302
PIQ3303
COQ33
PIQ3401
PIQ3402
PIQ3403
COQ34
PIQ3501
PIQ3502
PIQ3503 COQ35
PIQ3601
PIQ3602
PIQ3603 COQ36
PIQ3701
PIQ3702
PIQ3703 COQ37
PIQ3801
PIQ3802
PIQ3803
COQ38 PIQ3901
PIQ3902
PIQ3903 COQ39
PIQ4001
PIQ4002
PIQ4003 COQ40
PIQ4101
PIQ4102
PIQ4103 COQ41
PIQ4201
PIQ4202
PIQ4203
COQ42
PIQ4301
PIQ4302
PIQ4303
COQ43
PIQ4401
PIQ4402
PIQ4403
COQ44
PIQ4501
PIQ4502
PIQ4503 COQ45
PIQ4601
PIQ4602
PIQ4603
COQ46
PIQ4701
PIQ4702
PIQ4703
COQ47
PIQ4801
PIQ4802
PIQ4803
COQ48
PIQ4901
PIQ4902
PIQ4903 COQ49
PIQ5001
PIQ5002
PIQ5003 COQ50
PIQ5101
PIQ5102
PIQ5103 COQ51
PIQ5201
PIQ5202
PIQ5203 COQ52
PIQ5301
PIQ5302
PIQ5303 COQ53
PIQ5401
PIQ5402
PIQ5403 COQ54
PIQ5501
PIQ5502
PIQ5503
COQ55
PIQ5601
PIQ5602
PIQ5603
COQ56
PIQ5701
PIQ5702
PIQ5703
COQ57
PIQ5801
PIQ5802
PIQ5803 COQ58
PIQ5901
PIQ5902
PIQ5903
COQ59
PIQ6001
PIQ6002
PIQ6003
COQ60
PIQ6101
PIQ6102
PIQ6103
COQ61
PIQ6201
PIQ6202
PIQ6203 COQ62
PIQ6301
PIQ6302
PIQ6303 COQ63
PIQ6401
PIQ6402
PIQ6403 COQ64
PIQ6501
PIQ6502
PIQ6503 COQ65
PIQ6601
PIQ6602
PIQ6603 COQ66
PIQ6701
PIQ6702
PIQ6703 COQ67
PIQ6801
PIQ6802
PIQ6803 COQ68
PIQ6901
PIQ6902
PIQ6903 COQ69
PIQ7001
PIQ7002
PIQ7003 COQ70
PIQ7101
PIQ7102
PIQ7103
COQ71
PIQ7201
PIQ7202
PIQ7203
COQ72
PIQ7301
PIQ7302
PIQ7303
COQ73
PIQ7401
PIQ7402
PIQ7403
COQ74
PIQ7501
PIQ7502
PIQ7503
COQ75
PIQ7601
PIQ7602
PIQ7603 COQ76
PIQ7701
PIQ7702
PIQ7703 COQ77
PIQ7801
PIQ7802
PIQ7803 COQ78
PIQ7901
PIQ7902
PIQ7903 COQ79
PIQ8001
PIQ8002
PIQ8003 COQ80
PIQ8101
PIQ8102
PIQ8103 COQ81
PIQ8201
PIQ8202
PIQ8203 COQ82
PIQ8301
PIQ8302
PIQ8303
COQ83
PIQ8401
PIQ8402
PIQ8403
COQ84
PIQ8501
PIQ8502
PIQ8503
COQ85
PIQ8601
PIQ8602
PIQ8603
COQ86
PIQ8701
PIQ8702
PIQ8703
COQ87
PIQ8801
PIQ8802
PIQ8803
COQ88
PIQ8901
PIQ8902
PIQ8903 COQ89
PIQ9001
PIQ9002
PIQ9003
COQ90
PIR101
PIR102 COR1
PIR201 PIR202
COR2
PIR301 PIR302
COR3
PIR401 PIR402
COR4
PIR501
PIR502
COR5
PIR601
PIR602 COR6
PIR701
PIR702 COR7
PIR801
PIR802 COR8
PIR901
PIR902 COR9
PIR1001
PIR1002 COR10
PIR1101
PIR1102 COR11 PIR1201
PIR1202
COR12
PIR1301
PIR1302 COR13
PIR1401 PIR1402
COR14 PIR1501 PIR1502
COR15 PIR1601 PIR1602
COR16 PIR1701 PIR1702
COR17
PIR1801
PIR1802
COR18
PIR1901
PIR1902 COR19
PIR2001
PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301 PIR2302
COR23
PIR2401 PIR2402
COR24
PIR2501
PIR2502
COR25
PIR2601 PIR2602
COR26 PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28 PIR2901 PIR2902
COR29
PIR3001 PIR3002
COR30 PIR3101 PIR3102
COR31
PIR3201 PIR3202
COR32
PIR3301 PIR3302
COR33
PIR3401
PIR3402 COR34
PIR3501 PIR3502
COR35
PIR3601 PIR3602
COR36
PIR3701 PIR3702
COR37
PIR3801 PIR3802
COR38
PIR3901
PIR3902
COR39
PIR4001 PIR4002
COR40
PIR4101 PIR4102
COR41
PIR4201 PIR4202
COR42
PIR4301 PIR4302
COR43
PIR4401
PIR4402
COR44
PIR4501 PIR4502 COR45
PIR4601 PIR4602 COR46
PIR4701 PIR4702 COR47
PIR4801 PIR4802
COR48
PIR4901
PIR4902 COR49
PIR5001 PIR5002
COR50 PIR5101 PIR5102
COR51
PIR5201 PIR5202
COR52
PIR5301 PIR5302 COR53
PIR5401
PIR5402 COR54
PIR5501 PIR5502
COR55 PIR5601 PIR5602
COR56
PIR5701 PIR5702
COR57
PIR5801 PIR5802
COR58
PIR5901
PIR5902 COR59
PIR6001 PIR6002 COR60
PIR6101 PIR6102 COR61
PIR6201 PIR6202
COR62
PIR6301 PIR6302
COR63
PIR6401
PIR6402
COR64
PIR6501 PIR6502
COR65 PIR6601 PIR6602
COR66
PIR6701 PIR6702
COR67
PIR6801 PIR6802
COR68
PIR6901
PIR6902 COR69
PIR7001 PIR7002
COR70 PIR7101 PIR7102
COR71
PIR7201 PIR7202
COR72
PIR7301 PIR7302 COR73
PIR7401
PIR7402
COR74
PIR7501 PIR7502
COR75 PIR7601 PIR7602
COR76
PIR7701 PIR7702
COR77
PIR7801 PIR7802
COR78 PIR7901 PIR7902
COR79
PIR8001 PIR8002
COR80
PIR8101 PIR8102 COR81 PIR8201 PIR8202 COR82
PIR8301
PIR8302 COR83
PIR8401 PIR8402
COR84
PIR8501 PIR8502
COR85
PIR8601 PIR8602
COR86
PIR8701 PIR8702 COR87
PIR8801
PIR8802
COR88
PIR8901 PIR8902
COR89 PIR9001 PIR9002
COR90
PIR9101 PIR9102
COR91
PIR9201 PIR9202
COR92
PIR9301
PIR9302 COR93
PIR9401 PIR9402 COR94
PIR9501 PIR9502 COR95
PIR9601 PIR9602
COR96
PIR9701 PIR9702
COR97
PIR9801
PIR9802
COR98
PIR9901 PIR9902
COR99 PIR10001 PIR10002
COR100
PIR10101 PIR10102
COR101 PIR10201 PIR10202
COR102
PIR10301 PIR10302
COR103
PIR10401 PIR10402 COR104
PIR10501 PIR10502 COR105
PIR10601 PIR10602
COR106
PIR10701
PIR10702 COR107
PIR10801 PIR10802
COR108 PIR10901 PIR10902
COR109
PIR11001 PIR11002 COR110
PIR11101 PIR11102
COR111
PIR11201
PIR11202 COR112
PIR11301 PIR11302
COR113
PIR11401 PIR11402
COR114
PIR11501 PIR11502
COR115
PIR11601 PIR11602
COR116
PIR11701
PIR11702
COR117
PIR11801 PIR11802
COR118 PIR11901 PIR11902
COR119
PIR12001 PIR12002 COR120
PIR12101 PIR12102
COR121
PIR12201
PIR12202 COR122
PIR12301 PIR12302
COR123 PIR12401 PIR12402
COR124
PIR12501 PIR12502
COR125
PIR12601 PIR12602 COR126
PIR12701
PIR12702 COR127
PIR12801 PIR12802
COR128
PIR12901 PIR12902
COR129
PIR13001 PIR13002
COR130
PIR13101 PIR13102
COR131
PIR13201 PIR13202
COR132
PIR13301 PIR13302
COR133
PIR13401
PIR13402
COR134
PIR13501 PIR13502
COR135 PIR13601 PIR13602
COR136
PIR13701 PIR13702
COR137 PIR13801 PIR13802
COR138
PIR13901 PIR13902 COR139
PIR14001 PIR14002
COR140
PIR14101
PIR14102 COR141
PIR14201 PIR14202
COR142 PIR14301 PIR14302
COR143
PIR14401 PIR14402
COR144
PIR14501 PIR14502 COR145
PIR14601
PIR14602
COR146
PIR14701 PIR14702
COR147 PIR14801 PIR14802
COR148
PIR14901 PIR14902 COR149
PIR15001 PIR15002
COR150
PIR15101
PIR15102 COR151
PIR15201 PIR15202
COR152 PIR15301 PIR15302
COR153
PIR15401 PIR15402
COR154
PIR15501 PIR15502 COR155
PIR15601
PIR15602 COR156
PIR15701 PIR15702
COR157
PIR15801 PIR15802
COR158
PIR15901 PIR15902
COR159
PIR16001 PIR16002
COR160
PIR16101
PIR16102
COR161
PIR16201 PIR16202
COR162 PIR16301 PIR16302
COR163
PIR16401 PIR16402
COR164
PIR16501 PIR16502
COR165
PIR16601
PIR16602 COR166
PIR16701 PIR16702 COR167 PIR16801 PIR16802 COR168
PIR16901 PIR16902
COR169
PIR17001 PIR17002
COR170
PIR17101
PIR17102
COR171
PIR17201 PIR17202 COR172
PIR17301 PIR17302 COR173
PIR17401 PIR17402 COR174
PIR17501 PIR17502 COR175
PIR17601 PIR17602
COR176
PIR17701 PIR17702
COR177
PIR17801 PIR17802
COR178
PIR17901 PIR17902 COR179
PIR18001
PIR18002
COR180
PIR18101 PIR18102
COR181 PIR18201 PIR18202
COR182
PIR18301 PIR18302
COR183
PIR18401 PIR18402
COR184
PIR18501
PIR18502 COR185
PIR18601 PIR18602
COR186 PIR18701 PIR18702
COR187
PIR18801 PIR18802
COR188
PIR18901 PIR18902 COR189
PIR19001
PIR19002 COR190
PIR19101 PIR19102
COR191 PIR19201 PIR19202
COR192
PIR19301 PIR19302
COR193
PIR19401 PIR19402
COR194
PIR19501
PIR19502 COR195
PIR19601 PIR19602
COR196 PIR19701 PIR19702
COR197
PIR19801 PIR19802
COR198
PIR19901 PIR19902
COR199
PIR20001 PIR20002 COR200
PIR20101 PIR20102 COR201
PIR20201 PIR20202 COR202
PIR20301 PIR20302 COR203
PIR20401
PIR20402 COR204
PIR20501 PIR20502
COR205 PIR20601 PIR20602
COR206
PIR20701 PIR20702
COR207
PIR20801 PIR20802
COR208
PIR20901
PIR20902
COR209
PIR21001 PIR21002 COR210 PIR21101 PIR21102 COR211
PIR21201 PIR21202
COR212
PIR21301 PIR21302
COR213
PIR21401
PIR21402
COR214
PIR21501 PIR21502
COR215 PIR21601 PIR21602
COR216
PIR21701 PIR21702
COR217
PIR21801 PIR21802 COR218
PIR21901
PIR21902 COR219
PIR22001 PIR22002 COR220
PIR22101 PIR22102 COR221
PIR22201 PIR22202
COR222
PIR22301 PIR22302
COR223
PIR22401
PIR22402 COR224
PIR22501 PIR22502 COR225
PIR22601 PIR22602
COR226 PIR22701 PIR22702
COR227
PIR22801 PIR22802 COR228 PIR22901
PIR22902
COR229
PIR23001
PIR23002
COR230
PIR23101
PIR23102
COR231
PIR23201
PIR23202 COR232
PIR23301 PIR23302
COR233
PIR23401 PIR23402
COR234 PIR23501 PIR23502
COR235
PIR23601 PIR23602
COR236
PIR23701 PIR23702
COR237
PIR23801 PIR23802 COR238
PIR23901
PIR23902 COR239
PIR24001 PIR24002 COR240 PIR24101 PIR24102 COR241
PIR24201
PIR24202
COR242
PIR24301
PIR24302
COR243
PIR24401
PIR24402
COR244
PIR24501 PIR24502
COR245
PIR24601 PIR24602
COR246
PIR24701 PIR24702
COR247 PIR24801 PIR24802
COR248
PIR24901 PIR24902
COR249
PIR25001 PIR25002 COR250
PIR25101 PIR25102 COR251
PIR25201
PIR25202
COR252
PIR25301 PIR25302
COR253
PIR25401
PIR25402
COR254
PIR25501
PIR25502
COR255
PIR25601
PIR25602 COR256
PIR25701 PIR25702
COR257
PIR25801 PIR25802
COR258
PIR25901 PIR25902
COR259
PIR26001 PIR26002 COR260
PIS101 PIS102
COS1
PIU101 PIU102
PIU103
PIU104 PIU105
PIU106
COU1
PIU2023
PIU2024
PIU2025
PIU2026
PIU2029
PIU2030
PIU2031 PIU2032
PIU2035
PIU2036
PIU2037
PIU2047
PIU2048
PIU2051
PIU2052 PIU2053
PIU2054
PIU2067
PIU2068
PIU2069
PIU2070
PIU2071
PIU2072
PIU2076
PIU2077
PIU2089
PIU2090 PIU2091
PIU2092
PIU2093
PIU2095
PIU2096
COU2A
PIU207
PIU208
PIU209
PIU2015
PIU2016
PIU2017
PIU2018
PIU2033
PIU2034
PIU2055
PIU2056
PIU2057
PIU2058
PIU2059 PIU2060
PIU2061
PIU2062
PIU2063
PIU2064
PIU2065
PIU2066
PIU2078
PIU2079
PIU2080
PIU2081
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
COU2B
PIU201
PIU202
PIU203
PIU204
PIU205 PIU2038
PIU2039
PIU2040
PIU2041
PIU2042
PIU2043
PIU2044
PIU2045
PIU2046
PIU2097
PIU2098
COU2C
PIU2012
PIU2013 PIU2014
PIU2049
PIU2073
PIU2094
COU2D
PIU206
PIU2010
PIU2011
PIU2019
PIU2020
PIU2021
PIU2022
PIU2027
PIU2028
PIU2050
PIU2074 PIU2075
PIU2099 PIU20100
COU2E
PIU301
PIU302
PIU303
PIU304 PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
PIU403 COU4
PIU501
PIU502
PIU503
PIU507
PIU5014 COU5A
PIU504
PIU505
PIU506
COU5B
PIU5011
PIU5012
PIU5013
COU5C
PIU508
PIU509
PIU5010
COU5D
PIU601
PIU602 PIU603
PIU604
COU6
PIU701
PIU702 PIU703
PIU704
COU7
PIU801
PIU802 PIU803
PIU804
COU8
PIU901
PIU902
PIU903
PIU907
PIU9014 COU9A
PIU904
PIU905 PIU906
COU9B
PIU9011
PIU9012
PIU9013
COU9C
PIU908 PIU909
PIU9010
COU9D
PIU1001
PIU1002 PIU1003
PIU1004
COU10
PIU1101
PIU1102 PIU1103
PIU1104
COU11
PIU1201
PIU1202 PIU1203
PIU1204
COU12
PIU1301
PIU1302 PIU1303
PIU1304
COU13
PIU1401
PIU1402 PIU1403
PIU1404
COU14
PIU1501
PIU1502 PIU1503
PIU1504
COU15
PIU1601
PIU1602
PIU1603
PIU1607
PIU16014 COU16A
PIU1604
PIU1605
PIU1606
COU16B
PIU16011
PIU16012
PIU16013
COU16C
PIU1608
PIU1609
PIU16010
COU16D
PIU1701
PIU1702 PIU1703
PIU1704
COU17
PIU1801
PIU1802 PIU1803
PIU1804
COU18
PIU1901
PIU1902 PIU1903
PIU1904
COU19
PIU2001
PIU2002
PIU2003
PIU2007
PIU20014 COU20A
PIU2004
PIU2005
PIU2006
COU20B
PIU20011
PIU20012
PIU20013
COU20C
PIU2008
PIU2009
PIU20010
COU20D
PIU2101
PIU2102 PIU2103
PIU2104
COU21
PIU2201
PIU2202
PIU2203
PIU2207
PIU22014 COU22A
PIU2204
PIU2205
PIU2206
COU22B
PIU22011
PIU22012
PIU22013
COU22C
PIU2208
PIU2209
PIU22010
COU22D
PIU2301
PIU2302 PIU2303
PIU2304
COU23
PIU2401
PIU2402 PIU2403
PIU2404
COU24
PIU2501
PIU2502 PIU2503
PIU2504
COU25
PIU2601
PIU2602
PIU2603
PIU2607
PIU26014 COU26A
PIU2604
PIU2605 PIU2606
COU26B
PIU26011
PIU26012
PIU26013
COU26C
PIU2608
PIU2609
PIU26010
COU26D
PIU2701
PIU2702 PIU2703
PIU2704
COU27
PIU2801
PIU2802 PIU2803
PIU2804
COU28
PIU2901
PIU2902
PIU2903
PIU2907
PIU29014 COU29A
PIU2904
PIU2905
PIU2906
COU29B
PIU29011
PIU29012
PIU29013
COU29C
PIU2908 PIU2909
PIU29010
COU29D
PIU3001
PIU3002 PIU3003
PIU3004
COU30
PIU3101
PIU3102 PIU3103
PIU3104
COU31
PIU3201
PIU3202 PIU3203
PIU3204
COU32
PIU3301
PIU3302
PIU3303
PIU3307
PIU33014 COU33A
PIU3304
PIU3305
PIU3306
COU33B
PIU33011
PIU33012
PIU33013
COU33C
PIU3308
PIU3309
PIU33010
COU33D
PIU3401
PIU3402 PIU3403
PIU3404
COU34
PIU3501
PIU3502 PIU3503
PIU3504
COU35
PIU3601
PIU3602 PIU3603
PIU3604
COU36
PIU3701
PIU3702 PIU3703
PIU3704
COU37
PIU3801
PIU3802 PIU3803
PIU3804
COU38
PIU3901
PIU3902
PIU3903
PIU3907
PIU39014 COU39A
PIU3904
PIU3905
PIU3906
COU39B
PIU39011
PIU39012
PIU39013
COU39C
PIU3908
PIU3909
PIU39010
COU39D
PIU4001
PIU4002 PIU4003
PIU4004
COU40
PIU4101
PIU4102 PIU4103
PIU4104
COU41 PIU4201
PIU4202
PIU4203
PIU4207
PIU42014 COU42A
PIU4204
PIU4205
PIU4206
COU42B
PIU42011
PIU42012
PIU42013
COU42C
PIU4208
PIU4209
PIU42010
COU42D
PIU4301
PIU4302 PIU4303
PIU4304
COU43
PIU4401
PIU4402 PIU4403
PIU4404
COU44
PIU4501
PIU4502 PIU4503
PIU4504
COU45
PIU4601
PIU4602
PIU4603
PIU4607
PIU46014 COU46A
PIU4604
PIU4605
PIU4606
COU46B
PIU46011
PIU46012
PIU46013
COU46C
PIU4608
PIU4609
PIU46010
COU46D
PIU4701
PIU4702 PIU4703
PIU4704
COU47
PIU4801
PIU4802 PIU4803
PIU4804
COU48
PIU4901
PIU4902
PIU4903
PIU4907
PIU49014 COU49A
PIU4904
PIU4905
PIU4906
COU49B
PIU49011
PIU49012
PIU49013
COU49C
PIU4908
PIU4909
PIU49010 COU49D
PIU5001
PIU5002 PIU5003
PIU5004
COU50
PIU5101
PIU5102 PIU5103
PIU5104
COU51
PIU5201
PIU5202 PIU5203
PIU5204
COU52
PIU5301
PIU5302
PIU5303
PIU5307
PIU53014 COU53A
PIU5304
PIU5305
PIU5306
COU53B
PIU53011
PIU53012
PIU53013
COU53C
PIU5308
PIU5309
PIU53010
COU53D
PIU5401
PIU5402
PIU5403
PIU5407
PIU54014 COU54A
PIU5404
PIU5405
PIU5406
COU54B
PIU54011
PIU54012
PIU54013
COU54C
PIU5408
PIU5409
PIU54010
COU54D
PIU5501
PIU5502
PIU5503
PIU5507
PIU55014 COU55A
PIU5504
PIU5505
PIU5506
COU55B
PIU55011
PIU55012
PIU55013
COU55C
PIU5508
PIU5509
PIU55010
COU55D
PIV101
PIV102 PIV103
COV1
PIY101 PIY102
COY1
PIC201
PIC1101 PIC1201 PIC1301 PIC1401 PIC1501 PIC1601
PICN101
PICV201
PIJK101 PIJK201 PIJK301 PIJK401 PIJK501 PIJK601
PIJK701 PIJK801 PIJK901 PIJK1001 PIJK1101 PIJK1201
PIP101
PIP201
PIR102
PIR502
PIR602 PIR702
PIR1201 PIR1302
PIR2301
PIR3201
PIR3701
PIR4201
PIR4701
PIR5201
PIR5701
PIR6201
PIR6701
PIR7201
PIR7701
PIR8601
PIR9101
PIR9601
PIR10301
PIR11001
PIR11501
PIR12001
PIR12501
PIR13001
PIR13901
PIR14401
PIR14901
PIR15401
PIR15901
PIR16401
PIR16901
PIR17801
PIR18301
PIR18801
PIR19301
PIR19801
PIR20701
PIR21201
PIR21701
PIR22201
PIU206
PIU2011
PIU2019
PIU2021
PIU2022
PIU2028
PIU2050
PIU2075
PIU20100
PIU308
PIV102
PIC101
PIC301 PIC401
PICV101
PIL102
PIU104 PIV103
PIC1702 PIC1801
PIC1901
PID302 PID402
PID502 PID602
PIF102
PIJ1301
PIQ703
PIQ803
PIQ903
PIQ1103
PIQ2403 PIQ2503
PIQ2703 PIQ2803
PIQ3603 PIQ3703
PIQ3903 PIQ4003
PIQ4903
PIQ5103 PIQ5203
PIQ5403
PIQ6503 PIQ6603
PIQ6803 PIQ6903
PIQ7703
PIQ7903
PIQ8003
PIQ8103
PIR1801
PIR1902
PIR2102
PIR3002
PIR3502
PIR4002
PIR4502
PIR5002
PIR5502
PIR6002
PIR6502
PIR7002
PIR7502
PIR8402
PIR8902
PIR9402
PIR10102
PIR10802
PIR11302
PIR11802
PIR12302
PIR12802
PIR13702
PIR14202
PIR14702
PIR15202
PIR15702
PIR16202
PIR16702
PIR17602
PIR18102
PIR18602
PIR19102
PIR19602
PIR20502
PIR21002
PIR21502
PIR22002
PIU5014
PIU16014
PIU22014
PIU29014
PIU39014
PIU46014
PIC501 PIJ001
PIU101
PIC2001
PIFB102
PIU403
PIR402 PIU2094 NLBOOT0
PID4601
PIR22602
PIU902
PIU904
PIU5301
PIU5302
NLDA01
PID1002
PID1202
PIR22601 PIR23001
NLDA02
PID4701
PIR22702
PIU9010
PIU9013
PIU5304
PIU5305
NLDB01
PID1102 PID1302
PIR22701 PIR23102
NLDB02
PID4801
PIR22802
PIU2002
PIU2005
PIU53012
PIU53013
NLDC01
PID1702
PID1902
PIR22801
PIR23202
NLDC02
PID4501
PIR22502
PIU2009
PIU20013
PIU5309
PIU53010
NLDD1
PID1802 PID2002
PIR22501 PIR22901
NLDD2
PID5101
PIR24002
PIU2602
PIU2604
PIU5401
PIU5402
NLDE1
PID2502 PID2602
PIR24001
PIR24302
NLDE2
PID5201
PIR24102
PIU26010
PIU26013
PIU5404
PIU5405
NLDF1
PID2302 PID2402
PIR24101
PIR24402
NLDF2
PID5001
PIR23802
PIU3302
PIU3305
PIU54012
PIU54013
NLDG1
PID3002
PID3202
PIR23801
PIR24201
NLDG2
PIC102 PIC202 PIC302 PIC402 PIC502
PIC601
PIC701
PIC801 PIC901 PIC1001
PIC1102 PIC1202 PIC1302 PIC1402 PIC1502 PIC1602
PICN106
PICV102 PICV202 PID101
PID202
PIJ002
PIJK103 PIJK203 PIJK303 PIJK403 PIJK503 PIJK603
PIJK703 PIJK803 PIJK903 PIJK1003 PIJK1103 PIJK1203
PIP104
PIP203
PIQ102 PIQ202 PIQ302 PIQ402
PIR202
PIR301
PIR401
PIS101
PIU103
PIU105
PIU106
PIU2010
PIU2020
PIU2027
PIU2074
PIU2099
PIU301
PIU302
PIU303
PIU304
PIU307
PIV101
PID4901
PIR23702
PIU33010
PIU33013
PIU5409
PIU54010
NLDH1
PID2902 PID3102
PIR23701
PIR23902
NLDH2
PID5601
PIR25302
PIU4202
PIU4205
PIU5501
PIU5502
NLDI1
PID3502 PID3702
PIR25301
PIR25602
NLDI2
PID5401
PIR25002
PIU4209
PIU42013
PIU5504
PIU5505
NLDJ1
PID3602 PID3802
PIR25001 PIR25401
NLDJ2
PID5501
PIR25102
PIU4902
PIU4904
PIU55012
PIU55013
NLDK1
PID4202 PID4402
PIR25101
PIR25502
NLDK2
PID5301
PIR24902
PIU49010
PIU49013
PIU5509
PIU55010
NLDL1
PID4002 PID4302
PIR24901 PIR25202
NLDL2
PIU2051
PIU602
NLENA
PIR2202
PIU502
PIU505
NLENA024
PID902 PIR2402
PIR23401
NLENA0T
PIU2054
PIU1002
NLENB
PIR4102
PIU5010
PIU5013
NLENB024
PID1402 PIR4302
PIR23501
NLENB0T
PIU2057
PIU1302
NLENC
PIR5602
PIU1602
PIU1605
NLENC024
PID1502 PIR5802
PIR23601
NLENC0T
PIU2060
PIU1702
NLEND
PIR7102
PIU1609
PIU16012
NLEND024
PID1602 PIR7302
PIR23301 NLEND0T
PIU2063
PIU2102 NLENE
PIR9002
PIU2201
PIU2204
NLENE024 PID2102 PIR9202
PIR24701
NLENE0T
PIU2066
PIU2502 NLENF
PIR10902
PIU2209
PIU22012
NLENF024
PID2202 PIR11102
PIR24801
NLENF0T
PIU2048
PIU3002 NLENG
PIR12402
PIU2902
PIU2905
NLENG024
PID2702 PIR12602
PIR24601
NLENG0T
PIU2045
PIU3402 NLENH
PIR14302
PIU29010
PIU29013
NLENH024
PID2802 PIR14502
PIR24501
NLENH0T
PIU2042
PIU3702
NLENI
PIR15802
PIU3902
PIU3905
NLENI024
PID3302 PIR16002
PIR26001 NLENI0T
PIU205
PIU4102 NLENJ
PIR17702
PIU3909
PIU39012
NLENJ024
PID3402 PIR17902
PIR25801 NLENJ0T
PIU202
PIU4502 NLENK
PIR19202
PIU4601
PIU4604
NLENK024
PID3902 PIR19402
PIR25901
NLENK0T
PIU2097
PIU5002
NLENL
PIR21102
PIU4609
PIU46012
NLENL024
PID4102 PIR21302
PIR25701 NLENL0T
PIC1902
PIC2102
PIC2202 PIC2302
PIC2402 PIC2502
PIC2601
PIC2702 PIC2802
PIC2902 PIC3002
PIC3101
PIC3302 PIC3402
PIC3502 PIC3602
PIC3701
PIC3802 PIC3902
PIC4002 PIC4102
PIC4201
PIC4302 PIC4402 PIC4502 PIC4602
PIC4701
PIC4902 PIC5002 PIC5102 PIC5202
PIC5301
PID501 PID601
PID701
PID801
PIDS102
PIFB202
PIJ1302
PIQ603
PIQ1002
PIQ1202
PIQ1303 PIQ1402
PIQ1503
PIQ1603
PIQ1702 PIQ1803
PIQ1902
PIQ2002
PIQ2102
PIQ2202
PIQ2302
PIQ2602
PIQ2902
PIQ3002
PIQ3103 PIQ3203
PIQ3303
PIQ3403
PIQ3502
PIQ3802
PIQ4102
PIQ4203
PIQ4302 PIQ4403
PIQ4502
PIQ4603
PIQ4703
PIQ4802
PIQ5002
PIQ5302
PIQ5502
PIQ5603 PIQ5703
PIQ5802
PIQ5903 PIQ6003
PIQ6102
PIQ6202
PIQ6302
PIQ6402
PIQ6702
PIQ7002
PIQ7103 PIQ7203
PIQ7302
PIQ7403 PIQ7503
PIQ7602
PIQ7802
PIQ8202
PIQ8302 PIQ8403
PIQ8503
PIQ8602
PIQ8703
PIQ8803
PIQ8902
PIQ9002
PIR201
PIR2002
PIR2501 PIR2602 PIR2702
PIR2802 PIR2902
PIR3401
PIR3901
PIR4401
PIR4901
PIR5401
PIR5901
PIR6401
PIR6901
PIR7401
PIR7802 PIR7902
PIR8102 PIR8202
PIR8301
PIR8801
PIR9301
PIR9801 PIR9902 PIR10002
PIR10402 PIR10502
PIR10701
PIR11201
PIR11701
PIR12201
PIR12701
PIR13102 PIR13202
PIR13401
PIR13502 PIR13602
PIR14101
PIR14601
PIR15101
PIR15601
PIR16101
PIR16601
PIR17101
PIR17202 PIR17302 PIR17402 PIR17502
PIR18001
PIR18501
PIR19001
PIR19501
PIR20002 PIR20102 PIR20202 PIR20302
PIR20401
PIR20901
PIR21401
PIR21901
PIR22401
PIR22902
PIR23002 PIR23101
PIR23201
PIR23901
PIR24202
PIR24301 PIR24401
PIR25201
PIR25402
PIR25501
PIR25601
PIU907
PIU2007
PIU2607
PIU3307
PIU4207
PIU4907
PIU5307
PIU5407
PIU5507
PIC2002
PIFB201 PIU401
PIC1701 PIC1802
PID401
PIQ602
PIU507
PIU1607
PIU2207
PIU2907
PIU3907
PIU4607
PIU2052
PIU702
NLIN1
PIR3102
PIU501
NLIN1024
PID1201
PIR3302
PIR3402 PIU703
PIU901 NLIN10T
PIU2053
PIU802
NLIN2
PIR3602
PIU504
NLIN2024
PID1001
PIR3802 PIR3902 PIU803
PIU905 NLIN20T
PIU2055
PIU1102
NLIN3
PIR4602
PIU509 NLIN3024
PID1301
PIR4801
PIR4902
PIU909
PIU1103
NLIN30T
PIU2056
PIU1202
NLIN4
PIR5102
PIU5012 NLIN4024
PID1101
PIR5301
PIR5402
PIU9012
PIU1203
NLIN40T
PIU2058
PIU1402
NLIN5
PIR6102
PIU1601
NLIN5024
PID1901
PIR6301 PIR6402 PIU1403
PIU2001 NLIN50T
PIU2059
PIU1502
NLIN6
PIR6602
PIU1604
NLIN6024
PID1701
PIR6801
PIR6902 PIU1503
PIU2004 NLIN60T
PIU2061
PIU1802
NLIN7
PIR7602
PIU16010 NLIN7024
PID2001 PIR8002
PIR8302 PIU1803
PIU20010
NLIN70T
PIU2062
PIU1902
NLIN8
PIR8502
PIU16013 NLIN8024
PID1801
PIR8702 PIR8802
PIU1903
PIU20012 NLIN80T
PIU2064
PIU2302
NLIN9
PIR9502
PIU2202
NLIN9024
PID2601
PIR9701 PIR9802 PIU2303
PIU2601 NLIN90T
PIU2065
PIU2402 NLIN10
PIR10202
PIU2205
NLIN10024
PID2501
PIR10601
PIR10702 PIU2403
PIU2605 NLIN100T
PIU2070
PIU2702
NLIN11
PIR11402
PIU22010 NLIN11024
PID2401
PIR11601 PIR11702
PIU2609
PIU2703
NLIN110T
PIU2071
PIU2802 NLIN12
PIR11902
PIU22013 NLIN12024
PID2301
PIR12101
PIR12202
PIU26012
PIU2803
NLIN120T
PIU2047
PIU3102
NLIN13
PIR12902
PIU2901
NLIN13024
PID3201
PIR13302 PIR13402 PIU3103
PIU3301
NLIN130T
PIU2046
PIU3202
NLIN14
PIR13802
PIU2904
NLIN14024
PID3001
PIR14002
PIR14102 PIU3203
PIU3304
NLIN140T
PIU2044
PIU3502
NLIN15
PIR14802
PIU2909 NLIN15024
PID3101 PIR15001
PIR15102 PIU33012 PIU3503
NLIN150T
PIU2043
PIU3602 NLIN16
PIR15302
PIU29012 NLIN16024
PID2901
PIR15501
PIR15602
PIU3309
PIU3603
NLIN160T
PIU2041
PIU3802 NLIN17
PIR16302
PIU3901 NLIN17024
PID3701
PIR16501
PIR16602 PIU3803
PIU4201 NLIN170T
PIU2040
PIU4002
NLIN18
PIR16802
PIU3904
NLIN18024
PID3501
PIR17001 PIR17102 PIU4003
PIU4204 NLIN180T
PIU204
PIU4302 NLIN19
PIR18202
PIU39010 NLIN19024
PID3801
PIR18402
PIR18502
PIU42010
PIU4303
NLIN190T
PIU203
PIU4402 NLIN20
PIR18702
PIU39013
NLIN20024
PID3601
PIR18902
PIR19002
PIU42012
PIU4403
NLIN200T
PIU201
PIU4702 NLIN21
PIR19702
PIU4602
NLIN21024
PID4401
PIR19901
PIR20402 PIU4703
PIU4901 NLIN210T
PIU2098
PIU4802
NLIN22
PIR20602
PIU4605
NLIN22024
PID4201
PIR20801 PIR20902 PIU4803
PIU4905 NLIN220T
PIU2096
PIU5102 NLIN23
PIR21602
PIU46010 NLIN23024
PID4301
PIR21801 PIR21902
PIU4909
PIU5103
NLIN230T
PIU2095
PIU5202
NLIN24
PIR22102
PIU46013 NLIN24024
PID4001
PIR22301
PIR22402
PIU49012
PIU5203
NLIN240T
PIR1401
PIU2081
NLLED1
PICN102
PIR1002
NLLED10OUT
PIR1501
PIU2080
NLLED2
PICN103
PIR1102
NLLED20OUT
PIR1601
PIU2079
NLLED3 PICN104
PIR802
NLLED30OUT
PIR1701
PIU2078
NLLED4 PICN105
PIR902
NLLED40OUT
PIJK102
PIU2023
NLM1
PIJK202
PIU2024
NLM2
PIJK302
PIU2025
NLM3
PIJK402
PIU2026 NLM4
PIJK502
PIU2029 NLM5
PIJK602
PIU2030
NLM6
PIJK702
PIU2031 NLM7
PIJK802
PIU2032 NLM8
PIJK902
PIU2035 NLM9
PIJK1002
PIU2036 NLM10
PIJK1102
PIU2015
NLM11 PIJK1202
PIU2016
NLM12
PIC2401
PIJ101
PIQ1102
PIQ1302
PIR2801
NLMOTOR0100
PIC2501
PIJ102
PIQ802
PIQ1602
PIR2901
NLMOTOR0100
PIC2201
PIJ201
PIQ902
PIQ1502
PIR2601
NLMOTOR0200
PIC2301
PIJ202
PIQ702
PIQ1802
PIR2701
NLMOTOR0200
PIC2701
PIJ301
PIQ2702
PIQ3102
PIR7801
NLMOTOR0300
PIC2801
PIJ302
PIQ2402
PIQ3302
PIR7901
NLMOTOR0300
PIC2901
PIJ401
PIQ2802
PIQ3202
PIR8101
NLMOTOR0400
PIC3001
PIJ402
PIQ2502
PIQ3402
PIR8201
NLMOTOR0400
PIC3501
PIJ501
PIQ3902
PIQ4402
PIR10401
NLMOTOR0500
PIC3601
PIJ502
PIQ3602
PIQ4702
PIR10501
NLMOTOR0500
PIC3301
PIJ601
PIQ4002
PIQ4202
PIR9901
NLMOTOR0600
PIC3401
PIJ602
PIQ3702
PIQ4602
PIR10001
NLMOTOR0600
PIC4001
PIJ701
PIQ5402
PIQ5702
PIR13501
NLMOTOR0700
PIC4101
PIJ702
PIQ5102
PIQ6002
PIR13601
NLMOTOR0700
PIC3801
PIJ801
PIQ5202
PIQ5602
PIR13101
NLMOTOR0800
PIC3901
PIJ802 PIQ4902
PIQ5902
PIR13201
NLMOTOR0800
PIC4301
PIJ901
PIQ6802
PIQ7102
PIR17201
NLMOTOR0900
PIC4401
PIJ902
PIQ6502
PIQ7402
PIR17301
NLMOTOR0900
PIC4501
PIJ1001
PIQ6902
PIQ7202
PIR17401
NLMOTOR01000
PIC4601
PIJ1002
PIQ6602
PIQ7502
PIR17501
NLMOTOR01000
PIC4901
PIJ1101
PIQ8002
PIQ8502
PIR20001
NLMOTOR01100
PIC5001
PIJ1102
PIQ7702
PIQ8802
PIR20101
NLMOTOR01100
PIC5101
PIJ1201
PIQ8102
PIQ8402
PIR20201
NLMOTOR01200
PIC5201
PIJ1202
PIQ7902
PIQ8702
PIR20301
NLMOTOR01200
PIC602 PIU2049
PIC702 PIU2073
PID102
PIL101 PIU102
PID201 PIR101
PID301
PIQ601 PIR2001
PID702 PIQ501
PIR1901
PID901 PIR2502 PIU603
PID1401 PIR4402 PIU1003
PID1501
PIR5902 PIU1303
PID1601
PIR7402 PIU1703
PID2101
PIR9302 PIU2103
PID2201
PIR11202 PIU2503
PID2701
PIR12702 PIU3003
PID2801 PIR14602
PIU3403
PID3301 PIR16102 PIU3703
PID3401 PIR18002
PIU4103
PID3901
PIR19502 PIU4503
PID4101 PIR21402 PIU5003
PIDS101 PIR1802
PIF101
PIQ502
PIQ101 PIR1402
PIQ103 PIR1001
PIQ201 PIR1502
PIQ203 PIR1101
PIQ301 PIR1602
PIQ303
PIR801
PIQ401 PIR1702
PIQ403
PIR901
PIQ701 PIU508
PIQ801 PIU503
PIQ901 PIU5011
PIQ1001 PIR2401
PIQ1003 PIR2101 PIR2201
PIQ1101 PIU506
PIQ1201 PIR3301
PIQ1203 PIR3001 PIR3101
PIQ1301 PIU906 PIQ1401 PIR3801
PIQ1403 PIR3501 PIR3601
PIQ1601 PIU903
PIQ1701 PIR4301
PIQ1703 PIR4001 PIR4101
PIQ1801 PIU908
PIQ1901 PIR4802
PIQ1903 PIR4501 PIR4601
PIQ2001 PIR5302
PIQ2003 PIR5001 PIR5101
PIQ2101 PIR5801
PIQ2103 PIR5501 PIR5601
PIQ2201 PIR6302
PIQ2203 PIR6001 PIR6101
PIQ2301 PIR6802
PIQ2303 PIR6501 PIR6601
PIQ2401 PIU1603
PIQ2501 PIU1608
PIQ2601 PIR7301
PIQ2603 PIR7001 PIR7101
PIQ2701 PIU1606
PIQ2801 PIU16011
PIQ2901 PIR8001
PIQ2903 PIR7501 PIR7601
PIQ3001 PIR8701
PIQ3003 PIR8401 PIR8501
PIQ3101 PIU2006
PIQ3201 PIU20011
PIQ3301 PIU2003
PIQ3401 PIU2008
PIQ3501 PIR9201
PIQ3503 PIR8901 PIR9001
PIQ3601 PIU2203 PIQ3701 PIU2208
PIQ3801 PIR9702
PIQ3803 PIR9401 PIR9501
PIQ3901 PIU2206 PIQ4001 PIU22011
PIQ4101 PIR10602
PIQ4103 PIR10101 PIR10201
PIQ4201 PIU26011
PIQ4301 PIR11101
PIQ4303 PIR10801 PIR10901
PIQ4401 PIU2606
PIQ4501 PIR11602
PIQ4503 PIR11301 PIR11401
PIQ4601 PIU2608
PIQ4701 PIU2603
PIQ4801 PIR12102
PIQ4803 PIR11801 PIR11901
PIQ4901 PIU2908 PIQ5001 PIR12601
PIQ5003 PIR12301 PIR12401
PIQ5101 PIU2903 PIQ5201 PIU29011
PIQ5301 PIR13301
PIQ5303 PIR12801 PIR12901
PIQ5401 PIU2906
PIQ5501 PIR14001
PIQ5503 PIR13701 PIR13801
PIQ5601 PIU3308
PIQ5701 PIU3306
PIQ5801 PIR14501
PIQ5803 PIR14201 PIR14301
PIQ5901 PIU33011
PIQ6001 PIU3303
PIQ6101 PIR15002
PIQ6103 PIR14701 PIR14801
PIQ6201 PIR15502
PIQ6203 PIR15201 PIR15301
PIQ6301 PIR16001
PIQ6303 PIR15701 PIR15801
PIQ6401 PIR16502
PIQ6403 PIR16201 PIR16301
PIQ6501 PIU3903 PIQ6601 PIU3908
PIQ6701 PIR17002
PIQ6703 PIR16701 PIR16801
PIQ6801 PIU3906 PIQ6901 PIU39011
PIQ7001 PIR17901
PIQ7003 PIR17601 PIR17701
PIQ7101 PIU4206 PIQ7201 PIU42011
PIQ7301 PIR18401
PIQ7303 PIR18101 PIR18201
PIQ7401 PIU4203 PIQ7501 PIU4208
PIQ7601 PIR18901
PIQ7603 PIR18601 PIR18701
PIQ7701 PIU4603
PIQ7801 PIR19401
PIQ7803 PIR19101 PIR19201
PIQ7901 PIU4608
PIQ8001 PIU4606
PIQ8101 PIU46011
PIQ8201 PIR19902
PIQ8203 PIR19601 PIR19701
PIQ8301 PIR20802
PIQ8303 PIR20501 PIR20601
PIQ8401 PIU49011
PIQ8501 PIU4906
PIQ8601 PIR21301
PIQ8603 PIR21001 PIR21101
PIQ8701 PIU4908
PIQ8801 PIU4903
PIQ8901 PIR21802
PIQ8903 PIR21501 PIR21601
PIQ9001 PIR22302
PIQ9003 PIR22001 PIR22101
PIR302 PIU2037
PIR2302 PIU601
PIR3202 PIU701
PIR3702 PIU801
PIR4202 PIU1001
PIR4702 PIU1101
PIR5202 PIU1201
PIR5702 PIU1301
PIR6202 PIU1401
PIR6702 PIU1501
PIR7202 PIU1701
PIR7702 PIU1801
PIR8602 PIU1901
PIR9102 PIU2101
PIR9602 PIU2301
PIR10302 PIU2401
PIR11002 PIU2501
PIR11502 PIU2701
PIR12002 PIU2801
PIR12502 PIU3001
PIR13002 PIU3101
PIR13902 PIU3201
PIR14402 PIU3401
PIR14902 PIU3501
PIR15402 PIU3601
PIR15902 PIU3701
PIR16402 PIU3801
PIR16902 PIU4001
PIR17802 PIU4101
PIR18302 PIU4301
PIR18802 PIU4401
PIR19302 PIU4501
PIR19802 PIU4701
PIR20702 PIU4801
PIR21202 PIU5001
PIR21702 PIU5101
PIR22202 PIU5201
PIR23302 PIU5308
PIR23402 PIU5303 PIR23502 PIU5306
PIR23602 PIU53011
PIR24502 PIU5408
PIR24602 PIU54011
PIR24702 PIU5403 PIR24802 PIU5406
PIR25702 PIU5508
PIR25802 PIU5506
PIR25902 PIU55011
PIR26002 PIU5503
PIU207
PIU2017
PIU2018
PIU2033
PIU2034
PIU2038
PIU2039
PIU2067
PIU2077
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
PIU2089
PIU2090 PIU2091
PIU208
NLOSC320IN
PIU209 NLOSC320OUT
PIC1002
PIU2012
PIY102
NLOSCIN
PIC902
PIU2013 PIY101 NLOSCOUT
PIC802
PIR501 PIS102
PIU2014
NLR\E\S\E\T\
PID4502
PID4602 PID4702
PID4802
PID4902
PID5002
PID5102 PID5202
PID5302
PID5402
PID5502
PID5602
PIU402
PIR1202
PIU2092
PIU306
NLSCL
PIR1301
PIU2093
PIU305
NLSDA
PIP202
PIR601
PIU2076
NLSWD0CLK
PIP204
PIR701
PIU2072 NLSWD0DAT
PIQ1501 PIU9011
NLU3011
PIP103
PIU2069
NLUART0RX
PIP102
PIU2068
NLUART0TX
PIC2101
PIC2602
PIC3102
PIC3702
PIC4202
PIC4702
PIC5302
PID802
PIFB101
PIQ503
PIU604
PIU704
PIU804
PIU9014
PIU1004
PIU1104
PIU1204
PIU1304
PIU1404
PIU1504
PIU1704
PIU1804
PIU1904
PIU20014
PIU2104
PIU2304
PIU2404
PIU2504
PIU26014
PIU2704
PIU2804
PIU3004
PIU3104
PIU3204
PIU33014
PIU3404
PIU3504
PIU3604
PIU3704
PIU3804
PIU4004
PIU4104
PIU42014
PIU4304
PIU4404
PIU4504
PIU4704
PIU4804
PIU49014
PIU5004
PIU5104
PIU5204
PIU53014
PIU54014
PIU55014
Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
(a) 24-5V regulator LM2575D2T-5.
机器狗
转 电路
VIN3
GN
D1
OUT2
V1
AMS1117-3.3V
C1
104
+ CV2
10uF/16V
+ CV1
10uF/16V
C2
104
DGND DGND
+5V
1K
R1
D2
DGND
存储模块
下载接口
用于接外部指示灯
自恢复保险丝印字
+3.3V
PIC101
PIC102
COC1 PIC201
PIC202
COC2
PIC301
PIC302
COC3 PIC401
PIC402
COC4 PIC501
PIC502
COC5
PIC601 PIC602
COC6
PIC701 PIC702
COC7
PIC801
PIC802
COC8
PIC901
PIC902 COC9
PIC1001
PIC1002 COC10
PIC1101 PIC1102
COC11 PIC1201 PIC1202
COC12 PIC1301 PIC1302 COC13
PIC1401 PIC1402
COC14 PIC1501 PIC1502 COC15
PIC1601 PIC1602 COC16
PIC1701
PIC1702 COC17
PIC1801
PIC1802
COC18
PIC1901
PIC1902
COC19
PIC2001
PIC2002 COC20
PIC2101
PIC2102
COC21
PIC2201 PIC2202
COC22
PIC2301 PIC2302
COC23
PIC2401 PIC2402
COC24
PIC2501 PIC2502
COC25
PIC2601 PIC2602
COC26
PIC2701 PIC2702
COC27
PIC2801 PIC2802
COC28
PIC2901 PIC2902
COC29
PIC3001 PIC3002
COC30
PIC3101 PIC3102
COC31
PIC3301 PIC3302
COC33
PIC3401 PIC3402
COC34
PIC3501 PIC3502
COC35
PIC3601 PIC3602
COC36
PIC3701 PIC3702
COC37
PIC3801 PIC3802
COC38
PIC3901 PIC3902
COC39
PIC4001 PIC4002
COC40
PIC4101 PIC4102
COC41
PIC4201 PIC4202
COC42
PIC4301 PIC4302
COC43
PIC4401 PIC4402
COC44
PIC4501 PIC4502
COC45
PIC4601 PIC4602
COC46
PIC4701 PIC4702
COC47
PIC4901 PIC4902
COC49
PIC5001 PIC5002
COC50
PIC5101 PIC5102
COC51
PIC5201 PIC5202
COC52
PIC5301 PIC5302
COC53
PICN101 PICN102
PICN103
PICN104
PICN105
PICN106
COCN1
PICV101
PICV102
COCV1 PICV201
PICV202
COCV2
PID101
PID102 COD1
PID201
PID202 COD2
PID301
PID302 COD3
PID401
PID402 COD4
PID501
PID502
COD5
PID601
PID602
COD6
PID701
PID702 COD7
PID801
PID802 COD8
PID901 PID902
COD9
PID1001
PID1002
COD10
PID1101
PID1102
COD11
PID1201
PID1202 COD12
PID1301
PID1302
COD13
PID1401 PID1402
COD14
PID1501 PID1502
COD15
PID1601 PID1602
COD16
PID1701
PID1702
COD17
PID1801
PID1802
COD18
PID1901
PID1902 COD19
PID2001
PID2002 COD20
PID2101 PID2102
COD21
PID2201 PID2202
COD22
PID2301
PID2302
COD23
PID2401
PID2402
COD24
PID2501
PID2502
COD25
PID2601
PID2602 COD26
PID2701 PID2702
COD27
PID2801 PID2802
COD28
PID2901
PID2902
COD29
PID3001
PID3002
COD30
PID3101
PID3102 COD31
PID3201
PID3202 COD32
PID3301 PID3302
COD33
PID3401 PID3402
COD34
PID3501
PID3502
COD35 PID3601
PID3602
COD36
PID3701
PID3702 COD37
PID3801
PID3802 COD38
PID3901 PID3902
COD39
PID4001
PID4002
COD40
PID4101 PID4102
COD41
PID4201
PID4202
COD42
PID4301
PID4302 COD43
PID4401
PID4402 COD44
PID4501 PID4502
COD45
PID4601 PID4602
COD46
PID4701 PID4702
COD47
PID4801 PID4802
COD48
PID4901 PID4902
COD49
PID5001 PID5002
COD50
PID5101 PID5102
COD51
PID5201 PID5202
COD52
PID5301 PID5302
COD53
PID5401 PID5402
COD54
PID5501 PID5502
COD55
PID5601 PID5602
COD56
PIDS101
PIDS102 CODS1
PIF101
PIF102 COF1
PIFB101 PIFB102
COFB1
PIFB201 PIFB202
COFB2
PIJ001 PIJ002
COJ0
PIJ101
PIJ102
COJ1
PIJ201
PIJ202
COJ2
PIJ301
PIJ302
COJ3
PIJ401
PIJ402
COJ4
PIJ501
PIJ502
COJ5
PIJ601
PIJ602
COJ6
PIJ701
PIJ702
COJ7 PIJ801
PIJ802
COJ8
PIJ901
PIJ902
COJ9
PIJ1001
PIJ1002
COJ10
PIJ1101
PIJ1102
COJ11
PIJ1201
PIJ1202
COJ12
PIJ1301
PIJ1302
COJ13
PIJK101 PIJK102
PIJK103
COJK1
PIJK201 PIJK202
PIJK203
COJK2
PIJK301 PIJK302
PIJK303
COJK3
PIJK401 PIJK402
PIJK403
COJK4
PIJK501 PIJK502
PIJK503
COJK5
PIJK601 PIJK602
PIJK603
COJK6
PIJK701
PIJK702
PIJK703
COJK7
PIJK801
PIJK802
PIJK803
COJK8
PIJK901
PIJK902
PIJK903
COJK9
PIJK1001
PIJK1002
PIJK1003
COJK10
PIJK1101
PIJK1102
PIJK1103
COJK11
PIJK1201
PIJK1202
PIJK1203
COJK12
PIL101 PIL102
COL1
PIP101
PIP102
PIP103
PIP104
COP1
PIP201
PIP202
PIP203 PIP204
COP2
PIQ101
PIQ102
PIQ103 COQ1
PIQ201
PIQ202
PIQ203 COQ2
PIQ301
PIQ302
PIQ303 COQ3
PIQ401
PIQ402
PIQ403 COQ4
PIQ501
PIQ502
PIQ503
COQ5
PIQ601
PIQ602
PIQ603
COQ6
PIQ701
PIQ702
PIQ703 COQ7
PIQ801
PIQ802
PIQ803 COQ8
PIQ901
PIQ902
PIQ903 COQ9
PIQ1001
PIQ1002
PIQ1003 COQ10
PIQ1101
PIQ1102
PIQ1103 COQ11
PIQ1201
PIQ1202
PIQ1203
COQ12
PIQ1301
PIQ1302
PIQ1303
COQ13
PIQ1401
PIQ1402
PIQ1403 COQ14
PIQ1501
PIQ1502
PIQ1503
COQ15
PIQ1601
PIQ1602
PIQ1603
COQ16
PIQ1701
PIQ1702
PIQ1703 COQ17
PIQ1801
PIQ1802
PIQ1803
COQ18
PIQ1901
PIQ1902
PIQ1903 COQ19
PIQ2001
PIQ2002
PIQ2003 COQ20
PIQ2101
PIQ2102
PIQ2103 COQ21
PIQ2201
PIQ2202
PIQ2203 COQ22
PIQ2301
PIQ2302
PIQ2303 COQ23
PIQ2401
PIQ2402
PIQ2403 COQ24
PIQ2501
PIQ2502
PIQ2503 COQ25
PIQ2601
PIQ2602
PIQ2603 COQ26
PIQ2701
PIQ2702
PIQ2703 COQ27
PIQ2801
PIQ2802
PIQ2803 COQ28
PIQ2901
PIQ2902
PIQ2903
COQ29
PIQ3001
PIQ3002
PIQ3003 COQ30
PIQ3101
PIQ3102
PIQ3103
COQ31
PIQ3201
PIQ3202
PIQ3203
COQ32
PIQ3301
PIQ3302
PIQ3303
COQ33
PIQ3401
PIQ3402
PIQ3403
COQ34
PIQ3501
PIQ3502
PIQ3503 COQ35
PIQ3601
PIQ3602
PIQ3603 COQ36
PIQ3701
PIQ3702
PIQ3703 COQ37
PIQ3801
PIQ3802
PIQ3803
COQ38 PIQ3901
PIQ3902
PIQ3903 COQ39
PIQ4001
PIQ4002
PIQ4003 COQ40
PIQ4101
PIQ4102
PIQ4103 COQ41
PIQ4201
PIQ4202
PIQ4203
COQ42
PIQ4301
PIQ4302
PIQ4303
COQ43
PIQ4401
PIQ4402
PIQ4403
COQ44
PIQ4501
PIQ4502
PIQ4503 COQ45
PIQ4601
PIQ4602
PIQ4603
COQ46
PIQ4701
PIQ4702
PIQ4703
COQ47
PIQ4801
PIQ4802
PIQ4803
COQ48
PIQ4901
PIQ4902
PIQ4903 COQ49
PIQ5001
PIQ5002
PIQ5003 COQ50
PIQ5101
PIQ5102
PIQ5103 COQ51
PIQ5201
PIQ5202
PIQ5203 COQ52
PIQ5301
PIQ5302
PIQ5303 COQ53
PIQ5401
PIQ5402
PIQ5403 COQ54
PIQ5501
PIQ5502
PIQ5503
COQ55
PIQ5601
PIQ5602
PIQ5603
COQ56
PIQ5701
PIQ5702
PIQ5703
COQ57
PIQ5801
PIQ5802
PIQ5803 COQ58
PIQ5901
PIQ5902
PIQ5903
COQ59
PIQ6001
PIQ6002
PIQ6003
COQ60
PIQ6101
PIQ6102
PIQ6103
COQ61
PIQ6201
PIQ6202
PIQ6203 COQ62
PIQ6301
PIQ6302
PIQ6303 COQ63
PIQ6401
PIQ6402
PIQ6403 COQ64
PIQ6501
PIQ6502
PIQ6503 COQ65
PIQ6601
PIQ6602
PIQ6603 COQ66
PIQ6701
PIQ6702
PIQ6703 COQ67
PIQ6801
PIQ6802
PIQ6803 COQ68
PIQ6901
PIQ6902
PIQ6903 COQ69
PIQ7001
PIQ7002
PIQ7003 COQ70
PIQ7101
PIQ7102
PIQ7103
COQ71
PIQ7201
PIQ7202
PIQ7203
COQ72
PIQ7301
PIQ7302
PIQ7303
COQ73
PIQ7401
PIQ7402
PIQ7403
COQ74
PIQ7501
PIQ7502
PIQ7503
COQ75
PIQ7601
PIQ7602
PIQ7603 COQ76
PIQ7701
PIQ7702
PIQ7703 COQ77
PIQ7801
PIQ7802
PIQ7803 COQ78
PIQ7901
PIQ7902
PIQ7903 COQ79
PIQ8001
PIQ8002
PIQ8003 COQ80
PIQ8101
PIQ8102
PIQ8103 COQ81
PIQ8201
PIQ8202
PIQ8203 COQ82
PIQ8301
PIQ8302
PIQ8303
COQ83
PIQ8401
PIQ8402
PIQ8403
COQ84
PIQ8501
PIQ8502
PIQ8503
COQ85
PIQ8601
PIQ8602
PIQ8603
COQ86
PIQ8701
PIQ8702
PIQ8703
COQ87
PIQ8801
PIQ8802
PIQ8803
COQ88
PIQ8901
PIQ8902
PIQ8903 COQ89
PIQ9001
PIQ9002
PIQ9003
COQ90
PIR101
PIR102 COR1
PIR201 PIR202
COR2
PIR301 PIR302
COR3
PIR401 PIR402
COR4
PIR501
PIR502
COR5
PIR601
PIR602 COR6
PIR701
PIR702 COR7
PIR801
PIR802 COR8
PIR901
PIR902 COR9
PIR1001
PIR1002 COR10
PIR1101
PIR1102 COR11 PIR1201
PIR1202
COR12
PIR1301
PIR1302 COR13
PIR1401 PIR1402
COR14 PIR1501 PIR1502
COR15 PIR1601 PIR1602
COR16 PIR1701 PIR1702
COR17
PIR1801
PIR1802
COR18
PIR1901
PIR1902 COR19
PIR2001
PIR2002
COR20
PIR2101 PIR2102
COR21
PIR2201 PIR2202
COR22
PIR2301 PIR2302
COR23
PIR2401 PIR2402
COR24
PIR2501
PIR2502
COR25
PIR2601 PIR2602
COR26 PIR2701 PIR2702
COR27
PIR2801 PIR2802
COR28 PIR2901 PIR2902
COR29
PIR3001 PIR3002
COR30 PIR3101 PIR3102
COR31
PIR3201 PIR3202
COR32
PIR3301 PIR3302
COR33
PIR3401
PIR3402 COR34
PIR3501 PIR3502
COR35
PIR3601 PIR3602
COR36
PIR3701 PIR3702
COR37
PIR3801 PIR3802
COR38
PIR3901
PIR3902
COR39
PIR4001 PIR4002
COR40
PIR4101 PIR4102
COR41
PIR4201 PIR4202
COR42
PIR4301 PIR4302
COR43
PIR4401
PIR4402
COR44
PIR4501 PIR4502 COR45
PIR4601 PIR4602 COR46
PIR4701 PIR4702 COR47
PIR4801 PIR4802
COR48
PIR4901
PIR4902 COR49
PIR5001 PIR5002
COR50 PIR5101 PIR5102
COR51
PIR5201 PIR5202
COR52
PIR5301 PIR5302 COR53
PIR5401
PIR5402 COR54
PIR5501 PIR5502
COR55 PIR5601 PIR5602
COR56
PIR5701 PIR5702
COR57
PIR5801 PIR5802
COR58
PIR5901
PIR5902 COR59
PIR6001 PIR6002 COR60
PIR6101 PIR6102 COR61
PIR6201 PIR6202
COR62
PIR6301 PIR6302
COR63
PIR6401
PIR6402
COR64
PIR6501 PIR6502
COR65 PIR6601 PIR6602
COR66
PIR6701 PIR6702
COR67
PIR6801 PIR6802
COR68
PIR6901
PIR6902 COR69
PIR7001 PIR7002
COR70 PIR7101 PIR7102
COR71
PIR7201 PIR7202
COR72
PIR7301 PIR7302 COR73
PIR7401
PIR7402
COR74
PIR7501 PIR7502
COR75 PIR7601 PIR7602
COR76
PIR7701 PIR7702
COR77
PIR7801 PIR7802
COR78 PIR7901 PIR7902
COR79
PIR8001 PIR8002
COR80
PIR8101 PIR8102 COR81 PIR8201 PIR8202 COR82
PIR8301
PIR8302 COR83
PIR8401 PIR8402
COR84
PIR8501 PIR8502
COR85
PIR8601 PIR8602
COR86
PIR8701 PIR8702 COR87
PIR8801
PIR8802
COR88
PIR8901 PIR8902
COR89 PIR9001 PIR9002
COR90
PIR9101 PIR9102
COR91
PIR9201 PIR9202
COR92
PIR9301
PIR9302 COR93
PIR9401 PIR9402 COR94
PIR9501 PIR9502 COR95
PIR9601 PIR9602
COR96
PIR9701 PIR9702
COR97
PIR9801
PIR9802
COR98
PIR9901 PIR9902
COR99 PIR10001 PIR10002
COR100
PIR10101 PIR10102
COR101 PIR10201 PIR10202
COR102
PIR10301 PIR10302
COR103
PIR10401 PIR10402 COR104
PIR10501 PIR10502 COR105
PIR10601 PIR10602
COR106
PIR10701
PIR10702 COR107
PIR10801 PIR10802
COR108 PIR10901 PIR10902
COR109
PIR11001 PIR11002 COR110
PIR11101 PIR11102
COR111
PIR11201
PIR11202 COR112
PIR11301 PIR11302
COR113
PIR11401 PIR11402
COR114
PIR11501 PIR11502
COR115
PIR11601 PIR11602
COR116
PIR11701
PIR11702
COR117
PIR11801 PIR11802
COR118 PIR11901 PIR11902
COR119
PIR12001 PIR12002 COR120
PIR12101 PIR12102
COR121
PIR12201
PIR12202 COR122
PIR12301 PIR12302
COR123 PIR12401 PIR12402
COR124
PIR12501 PIR12502
COR125
PIR12601 PIR12602 COR126
PIR12701
PIR12702 COR127
PIR12801 PIR12802
COR128
PIR12901 PIR12902
COR129
PIR13001 PIR13002
COR130
PIR13101 PIR13102
COR131
PIR13201 PIR13202
COR132
PIR13301 PIR13302
COR133
PIR13401
PIR13402
COR134
PIR13501 PIR13502
COR135 PIR13601 PIR13602
COR136
PIR13701 PIR13702
COR137 PIR13801 PIR13802
COR138
PIR13901 PIR13902 COR139
PIR14001 PIR14002
COR140
PIR14101
PIR14102 COR141
PIR14201 PIR14202
COR142 PIR14301 PIR14302
COR143
PIR14401 PIR14402
COR144
PIR14501 PIR14502 COR145
PIR14601
PIR14602
COR146
PIR14701 PIR14702
COR147 PIR14801 PIR14802
COR148
PIR14901 PIR14902 COR149
PIR15001 PIR15002
COR150
PIR15101
PIR15102 COR151
PIR15201 PIR15202
COR152 PIR15301 PIR15302
COR153
PIR15401 PIR15402
COR154
PIR15501 PIR15502 COR155
PIR15601
PIR15602 COR156
PIR15701 PIR15702
COR157
PIR15801 PIR15802
COR158
PIR15901 PIR15902
COR159
PIR16001 PIR16002
COR160
PIR16101
PIR16102
COR161
PIR16201 PIR16202
COR162 PIR16301 PIR16302
COR163
PIR16401 PIR16402
COR164
PIR16501 PIR16502
COR165
PIR16601
PIR16602 COR166
PIR16701 PIR16702 COR167 PIR16801 PIR16802 COR168
PIR16901 PIR16902
COR169
PIR17001 PIR17002
COR170
PIR17101
PIR17102
COR171
PIR17201 PIR17202 COR172
PIR17301 PIR17302 COR173
PIR17401 PIR17402 COR174
PIR17501 PIR17502 COR175
PIR17601 PIR17602
COR176
PIR17701 PIR17702
COR177
PIR17801 PIR17802
COR178
PIR17901 PIR17902 COR179
PIR18001
PIR18002
COR180
PIR18101 PIR18102
COR181 PIR18201 PIR18202
COR182
PIR18301 PIR18302
COR183
PIR18401 PIR18402
COR184
PIR18501
PIR18502 COR185
PIR18601 PIR18602
COR186 PIR18701 PIR18702
COR187
PIR18801 PIR18802
COR188
PIR18901 PIR18902 COR189
PIR19001
PIR19002 COR190
PIR19101 PIR19102
COR191 PIR19201 PIR19202
COR192
PIR19301 PIR19302
COR193
PIR19401 PIR19402
COR194
PIR19501
PIR19502 COR195
PIR19601 PIR19602
COR196 PIR19701 PIR19702
COR197
PIR19801 PIR19802
COR198
PIR19901 PIR19902
COR199
PIR20001 PIR20002 COR200
PIR20101 PIR20102 COR201
PIR20201 PIR20202 COR202
PIR20301 PIR20302 COR203
PIR20401
PIR20402 COR204
PIR20501 PIR20502
COR205 PIR20601 PIR20602
COR206
PIR20701 PIR20702
COR207
PIR20801 PIR20802
COR208
PIR20901
PIR20902
COR209
PIR21001 PIR21002 COR210 PIR21101 PIR21102 COR211
PIR21201 PIR21202
COR212
PIR21301 PIR21302
COR213
PIR21401
PIR21402
COR214
PIR21501 PIR21502
COR215 PIR21601 PIR21602
COR216
PIR21701 PIR21702
COR217
PIR21801 PIR21802 COR218
PIR21901
PIR21902 COR219
PIR22001 PIR22002 COR220
PIR22101 PIR22102 COR221
PIR22201 PIR22202
COR222
PIR22301 PIR22302
COR223
PIR22401
PIR22402 COR224
PIR22501 PIR22502 COR225
PIR22601 PIR22602
COR226 PIR22701 PIR22702
COR227
PIR22801 PIR22802 COR228 PIR22901
PIR22902
COR229
PIR23001
PIR23002
COR230
PIR23101
PIR23102
COR231
PIR23201
PIR23202 COR232
PIR23301 PIR23302
COR233
PIR23401 PIR23402
COR234 PIR23501 PIR23502
COR235
PIR23601 PIR23602
COR236
PIR23701 PIR23702
COR237
PIR23801 PIR23802 COR238
PIR23901
PIR23902 COR239
PIR24001 PIR24002 COR240 PIR24101 PIR24102 COR241
PIR24201
PIR24202
COR242
PIR24301
PIR24302
COR243
PIR24401
PIR24402
COR244
PIR24501 PIR24502
COR245
PIR24601 PIR24602
COR246
PIR24701 PIR24702
COR247 PIR24801 PIR24802
COR248
PIR24901 PIR24902
COR249
PIR25001 PIR25002 COR250
PIR25101 PIR25102 COR251
PIR25201
PIR25202
COR252
PIR25301 PIR25302
COR253
PIR25401
PIR25402
COR254
PIR25501
PIR25502
COR255
PIR25601
PIR25602 COR256
PIR25701 PIR25702
COR257
PIR25801 PIR25802
COR258
PIR25901 PIR25902
COR259
PIR26001 PIR26002 COR260
PIS101 PIS102
COS1
PIU101 PIU102
PIU103
PIU104 PIU105
PIU106
COU1
PIU2023
PIU2024
PIU2025
PIU2026
PIU2029
PIU2030
PIU2031 PIU2032
PIU2035
PIU2036
PIU2037
PIU2047
PIU2048
PIU2051
PIU2052 PIU2053
PIU2054
PIU2067
PIU2068
PIU2069
PIU2070
PIU2071
PIU2072
PIU2076
PIU2077
PIU2089
PIU2090 PIU2091
PIU2092
PIU2093
PIU2095
PIU2096
COU2A
PIU207
PIU208
PIU209
PIU2015
PIU2016
PIU2017
PIU2018
PIU2033
PIU2034
PIU2055
PIU2056
PIU2057
PIU2058
PIU2059 PIU2060
PIU2061
PIU2062
PIU2063
PIU2064
PIU2065
PIU2066
PIU2078
PIU2079
PIU2080
PIU2081
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
COU2B
PIU201
PIU202
PIU203
PIU204
PIU205 PIU2038
PIU2039
PIU2040
PIU2041
PIU2042
PIU2043
PIU2044
PIU2045
PIU2046
PIU2097
PIU2098
COU2C
PIU2012
PIU2013 PIU2014
PIU2049
PIU2073
PIU2094
COU2D
PIU206
PIU2010
PIU2011
PIU2019
PIU2020
PIU2021
PIU2022
PIU2027
PIU2028
PIU2050
PIU2074 PIU2075
PIU2099 PIU20100
COU2E
PIU301
PIU302
PIU303
PIU304 PIU305
PIU306
PIU307
PIU308
COU3
PIU401
PIU402
PIU403 COU4
PIU501
PIU502
PIU503
PIU507
PIU5014 COU5A
PIU504
PIU505
PIU506
COU5B
PIU5011
PIU5012
PIU5013
COU5C
PIU508
PIU509
PIU5010
COU5D
PIU601
PIU602 PIU603
PIU604
COU6
PIU701
PIU702 PIU703
PIU704
COU7
PIU801
PIU802 PIU803
PIU804
COU8
PIU901
PIU902
PIU903
PIU907
PIU9014 COU9A
PIU904
PIU905 PIU906
COU9B
PIU9011
PIU9012
PIU9013
COU9C
PIU908 PIU909
PIU9010
COU9D
PIU1001
PIU1002 PIU1003
PIU1004
COU10
PIU1101
PIU1102 PIU1103
PIU1104
COU11
PIU1201
PIU1202 PIU1203
PIU1204
COU12
PIU1301
PIU1302 PIU1303
PIU1304
COU13
PIU1401
PIU1402 PIU1403
PIU1404
COU14
PIU1501
PIU1502 PIU1503
PIU1504
COU15
PIU1601
PIU1602
PIU1603
PIU1607
PIU16014 COU16A
PIU1604
PIU1605
PIU1606
COU16B
PIU16011
PIU16012
PIU16013
COU16C
PIU1608
PIU1609
PIU16010
COU16D
PIU1701
PIU1702 PIU1703
PIU1704
COU17
PIU1801
PIU1802 PIU1803
PIU1804
COU18
PIU1901
PIU1902 PIU1903
PIU1904
COU19
PIU2001
PIU2002
PIU2003
PIU2007
PIU20014 COU20A
PIU2004
PIU2005
PIU2006
COU20B
PIU20011
PIU20012
PIU20013
COU20C
PIU2008
PIU2009
PIU20010
COU20D
PIU2101
PIU2102 PIU2103
PIU2104
COU21
PIU2201
PIU2202
PIU2203
PIU2207
PIU22014 COU22A
PIU2204
PIU2205
PIU2206
COU22B
PIU22011
PIU22012
PIU22013
COU22C
PIU2208
PIU2209
PIU22010
COU22D
PIU2301
PIU2302 PIU2303
PIU2304
COU23
PIU2401
PIU2402 PIU2403
PIU2404
COU24
PIU2501
PIU2502 PIU2503
PIU2504
COU25
PIU2601
PIU2602
PIU2603
PIU2607
PIU26014 COU26A
PIU2604
PIU2605 PIU2606
COU26B
PIU26011
PIU26012
PIU26013
COU26C
PIU2608
PIU2609
PIU26010
COU26D
PIU2701
PIU2702 PIU2703
PIU2704
COU27
PIU2801
PIU2802 PIU2803
PIU2804
COU28
PIU2901
PIU2902
PIU2903
PIU2907
PIU29014 COU29A
PIU2904
PIU2905
PIU2906
COU29B
PIU29011
PIU29012
PIU29013
COU29C
PIU2908 PIU2909
PIU29010
COU29D
PIU3001
PIU3002 PIU3003
PIU3004
COU30
PIU3101
PIU3102 PIU3103
PIU3104
COU31
PIU3201
PIU3202 PIU3203
PIU3204
COU32
PIU3301
PIU3302
PIU3303
PIU3307
PIU33014 COU33A
PIU3304
PIU3305
PIU3306
COU33B
PIU33011
PIU33012
PIU33013
COU33C
PIU3308
PIU3309
PIU33010
COU33D
PIU3401
PIU3402 PIU3403
PIU3404
COU34
PIU3501
PIU3502 PIU3503
PIU3504
COU35
PIU3601
PIU3602 PIU3603
PIU3604
COU36
PIU3701
PIU3702 PIU3703
PIU3704
COU37
PIU3801
PIU3802 PIU3803
PIU3804
COU38
PIU3901
PIU3902
PIU3903
PIU3907
PIU39014 COU39A
PIU3904
PIU3905
PIU3906
COU39B
PIU39011
PIU39012
PIU39013
COU39C
PIU3908
PIU3909
PIU39010
COU39D
PIU4001
PIU4002 PIU4003
PIU4004
COU40
PIU4101
PIU4102 PIU4103
PIU4104
COU41 PIU4201
PIU4202
PIU4203
PIU4207
PIU42014 COU42A
PIU4204
PIU4205
PIU4206
COU42B
PIU42011
PIU42012
PIU42013
COU42C
PIU4208
PIU4209
PIU42010
COU42D
PIU4301
PIU4302 PIU4303
PIU4304
COU43
PIU4401
PIU4402 PIU4403
PIU4404
COU44
PIU4501
PIU4502 PIU4503
PIU4504
COU45
PIU4601
PIU4602
PIU4603
PIU4607
PIU46014 COU46A
PIU4604
PIU4605
PIU4606
COU46B
PIU46011
PIU46012
PIU46013
COU46C
PIU4608
PIU4609
PIU46010
COU46D
PIU4701
PIU4702 PIU4703
PIU4704
COU47
PIU4801
PIU4802 PIU4803
PIU4804
COU48
PIU4901
PIU4902
PIU4903
PIU4907
PIU49014 COU49A
PIU4904
PIU4905
PIU4906
COU49B
PIU49011
PIU49012
PIU49013
COU49C
PIU4908
PIU4909
PIU49010 COU49D
PIU5001
PIU5002 PIU5003
PIU5004
COU50
PIU5101
PIU5102 PIU5103
PIU5104
COU51
PIU5201
PIU5202 PIU5203
PIU5204
COU52
PIU5301
PIU5302
PIU5303
PIU5307
PIU53014 COU53A
PIU5304
PIU5305
PIU5306
COU53B
PIU53011
PIU53012
PIU53013
COU53C
PIU5308
PIU5309
PIU53010
COU53D
PIU5401
PIU5402
PIU5403
PIU5407
PIU54014 COU54A
PIU5404
PIU5405
PIU5406
COU54B
PIU54011
PIU54012
PIU54013
COU54C
PIU5408
PIU5409
PIU54010
COU54D
PIU5501
PIU5502
PIU5503
PIU5507
PIU55014 COU55A
PIU5504
PIU5505
PIU5506
COU55B
PIU55011
PIU55012
PIU55013
COU55C
PIU5508
PIU5509
PIU55010
COU55D
PIV101
PIV102 PIV103
COV1
PIY101 PIY102
COY1
PIC201
PIC1101 PIC1201 PIC1301 PIC1401 PIC1501 PIC1601
PICN101
PICV201
PIJK101 PIJK201 PIJK301 PIJK401 PIJK501 PIJK601
PIJK701 PIJK801 PIJK901 PIJK1001 PIJK1101 PIJK1201
PIP101
PIP201
PIR102
PIR502
PIR602 PIR702
PIR1201 PIR1302
PIR2301
PIR3201
PIR3701
PIR4201
PIR4701
PIR5201
PIR5701
PIR6201
PIR6701
PIR7201
PIR7701
PIR8601
PIR9101
PIR9601
PIR10301
PIR11001
PIR11501
PIR12001
PIR12501
PIR13001
PIR13901
PIR14401
PIR14901
PIR15401
PIR15901
PIR16401
PIR16901
PIR17801
PIR18301
PIR18801
PIR19301
PIR19801
PIR20701
PIR21201
PIR21701
PIR22201
PIU206
PIU2011
PIU2019
PIU2021
PIU2022
PIU2028
PIU2050
PIU2075
PIU20100
PIU308
PIV102
PIC101
PIC301 PIC401
PICV101
PIL102
PIU104 PIV103
PIC1702 PIC1801
PIC1901
PID302 PID402
PID502 PID602
PIF102
PIJ1301
PIQ703
PIQ803
PIQ903
PIQ1103
PIQ2403 PIQ2503
PIQ2703 PIQ2803
PIQ3603 PIQ3703
PIQ3903 PIQ4003
PIQ4903
PIQ5103 PIQ5203
PIQ5403
PIQ6503 PIQ6603
PIQ6803 PIQ6903
PIQ7703
PIQ7903
PIQ8003
PIQ8103
PIR1801
PIR1902
PIR2102
PIR3002
PIR3502
PIR4002
PIR4502
PIR5002
PIR5502
PIR6002
PIR6502
PIR7002
PIR7502
PIR8402
PIR8902
PIR9402
PIR10102
PIR10802
PIR11302
PIR11802
PIR12302
PIR12802
PIR13702
PIR14202
PIR14702
PIR15202
PIR15702
PIR16202
PIR16702
PIR17602
PIR18102
PIR18602
PIR19102
PIR19602
PIR20502
PIR21002
PIR21502
PIR22002
PIU5014
PIU16014
PIU22014
PIU29014
PIU39014
PIU46014
PIC501 PIJ001
PIU101
PIC2001
PIFB102
PIU403
PIR402 PIU2094 NLBOOT0
PID4601
PIR22602
PIU902
PIU904
PIU5301
PIU5302
NLDA01
PID1002
PID1202
PIR22601 PIR23001
NLDA02
PID4701
PIR22702
PIU9010
PIU9013
PIU5304
PIU5305
NLDB01
PID1102 PID1302
PIR22701 PIR23102
NLDB02
PID4801
PIR22802
PIU2002
PIU2005
PIU53012
PIU53013
NLDC01
PID1702
PID1902
PIR22801
PIR23202
NLDC02
PID4501
PIR22502
PIU2009
PIU20013
PIU5309
PIU53010
NLDD1
PID1802 PID2002
PIR22501 PIR22901
NLDD2
PID5101
PIR24002
PIU2602
PIU2604
PIU5401
PIU5402
NLDE1
PID2502 PID2602
PIR24001
PIR24302
NLDE2
PID5201
PIR24102
PIU26010
PIU26013
PIU5404
PIU5405
NLDF1
PID2302 PID2402
PIR24101
PIR24402
NLDF2
PID5001
PIR23802
PIU3302
PIU3305
PIU54012
PIU54013
NLDG1
PID3002
PID3202
PIR23801
PIR24201
NLDG2
PIC102 PIC202 PIC302 PIC402 PIC502
PIC601
PIC701
PIC801 PIC901 PIC1001
PIC1102 PIC1202 PIC1302 PIC1402 PIC1502 PIC1602
PICN106
PICV102 PICV202 PID101
PID202
PIJ002
PIJK103 PIJK203 PIJK303 PIJK403 PIJK503 PIJK603
PIJK703 PIJK803 PIJK903 PIJK1003 PIJK1103 PIJK1203
PIP104
PIP203
PIQ102 PIQ202 PIQ302 PIQ402
PIR202
PIR301
PIR401
PIS101
PIU103
PIU105
PIU106
PIU2010
PIU2020
PIU2027
PIU2074
PIU2099
PIU301
PIU302
PIU303
PIU304
PIU307
PIV101
PID4901
PIR23702
PIU33010
PIU33013
PIU5409
PIU54010
NLDH1
PID2902 PID3102
PIR23701
PIR23902
NLDH2
PID5601
PIR25302
PIU4202
PIU4205
PIU5501
PIU5502
NLDI1
PID3502 PID3702
PIR25301
PIR25602
NLDI2
PID5401
PIR25002
PIU4209
PIU42013
PIU5504
PIU5505
NLDJ1
PID3602 PID3802
PIR25001 PIR25401
NLDJ2
PID5501
PIR25102
PIU4902
PIU4904
PIU55012
PIU55013
NLDK1
PID4202 PID4402
PIR25101
PIR25502
NLDK2
PID5301
PIR24902
PIU49010
PIU49013
PIU5509
PIU55010
NLDL1
PID4002 PID4302
PIR24901 PIR25202
NLDL2
PIU2051
PIU602
NLENA
PIR2202
PIU502
PIU505
NLENA024
PID902 PIR2402
PIR23401
NLENA0T
PIU2054
PIU1002
NLENB
PIR4102
PIU5010
PIU5013
NLENB024
PID1402 PIR4302
PIR23501
NLENB0T
PIU2057
PIU1302
NLENC
PIR5602
PIU1602
PIU1605
NLENC024
PID1502 PIR5802
PIR23601
NLENC0T
PIU2060
PIU1702
NLEND
PIR7102
PIU1609
PIU16012
NLEND024
PID1602 PIR7302
PIR23301 NLEND0T
PIU2063
PIU2102 NLENE
PIR9002
PIU2201
PIU2204
NLENE024 PID2102 PIR9202
PIR24701
NLENE0T
PIU2066
PIU2502 NLENF
PIR10902
PIU2209
PIU22012
NLENF024
PID2202 PIR11102
PIR24801
NLENF0T
PIU2048
PIU3002 NLENG
PIR12402
PIU2902
PIU2905
NLENG024
PID2702 PIR12602
PIR24601
NLENG0T
PIU2045
PIU3402 NLENH
PIR14302
PIU29010
PIU29013
NLENH024
PID2802 PIR14502
PIR24501
NLENH0T
PIU2042
PIU3702
NLENI
PIR15802
PIU3902
PIU3905
NLENI024
PID3302 PIR16002
PIR26001 NLENI0T
PIU205
PIU4102 NLENJ
PIR17702
PIU3909
PIU39012
NLENJ024
PID3402 PIR17902
PIR25801 NLENJ0T
PIU202
PIU4502 NLENK
PIR19202
PIU4601
PIU4604
NLENK024
PID3902 PIR19402
PIR25901
NLENK0T
PIU2097
PIU5002
NLENL
PIR21102
PIU4609
PIU46012
NLENL024
PID4102 PIR21302
PIR25701 NLENL0T
PIC1902
PIC2102
PIC2202 PIC2302
PIC2402 PIC2502
PIC2601
PIC2702 PIC2802
PIC2902 PIC3002
PIC3101
PIC3302 PIC3402
PIC3502 PIC3602
PIC3701
PIC3802 PIC3902
PIC4002 PIC4102
PIC4201
PIC4302 PIC4402 PIC4502 PIC4602
PIC4701
PIC4902 PIC5002 PIC5102 PIC5202
PIC5301
PID501 PID601
PID701
PID801
PIDS102
PIFB202
PIJ1302
PIQ603
PIQ1002
PIQ1202
PIQ1303 PIQ1402
PIQ1503
PIQ1603
PIQ1702 PIQ1803
PIQ1902
PIQ2002
PIQ2102
PIQ2202
PIQ2302
PIQ2602
PIQ2902
PIQ3002
PIQ3103 PIQ3203
PIQ3303
PIQ3403
PIQ3502
PIQ3802
PIQ4102
PIQ4203
PIQ4302 PIQ4403
PIQ4502
PIQ4603
PIQ4703
PIQ4802
PIQ5002
PIQ5302
PIQ5502
PIQ5603 PIQ5703
PIQ5802
PIQ5903 PIQ6003
PIQ6102
PIQ6202
PIQ6302
PIQ6402
PIQ6702
PIQ7002
PIQ7103 PIQ7203
PIQ7302
PIQ7403 PIQ7503
PIQ7602
PIQ7802
PIQ8202
PIQ8302 PIQ8403
PIQ8503
PIQ8602
PIQ8703
PIQ8803
PIQ8902
PIQ9002
PIR201
PIR2002
PIR2501 PIR2602 PIR2702
PIR2802 PIR2902
PIR3401
PIR3901
PIR4401
PIR4901
PIR5401
PIR5901
PIR6401
PIR6901
PIR7401
PIR7802 PIR7902
PIR8102 PIR8202
PIR8301
PIR8801
PIR9301
PIR9801 PIR9902 PIR10002
PIR10402 PIR10502
PIR10701
PIR11201
PIR11701
PIR12201
PIR12701
PIR13102 PIR13202
PIR13401
PIR13502 PIR13602
PIR14101
PIR14601
PIR15101
PIR15601
PIR16101
PIR16601
PIR17101
PIR17202 PIR17302 PIR17402 PIR17502
PIR18001
PIR18501
PIR19001
PIR19501
PIR20002 PIR20102 PIR20202 PIR20302
PIR20401
PIR20901
PIR21401
PIR21901
PIR22401
PIR22902
PIR23002 PIR23101
PIR23201
PIR23901
PIR24202
PIR24301 PIR24401
PIR25201
PIR25402
PIR25501
PIR25601
PIU907
PIU2007
PIU2607
PIU3307
PIU4207
PIU4907
PIU5307
PIU5407
PIU5507
PIC2002
PIFB201 PIU401
PIC1701 PIC1802
PID401
PIQ602
PIU507
PIU1607
PIU2207
PIU2907
PIU3907
PIU4607
PIU2052
PIU702
NLIN1
PIR3102
PIU501
NLIN1024
PID1201
PIR3302
PIR3402 PIU703
PIU901 NLIN10T
PIU2053
PIU802
NLIN2
PIR3602
PIU504
NLIN2024
PID1001
PIR3802 PIR3902 PIU803
PIU905 NLIN20T
PIU2055
PIU1102
NLIN3
PIR4602
PIU509 NLIN3024
PID1301
PIR4801
PIR4902
PIU909
PIU1103
NLIN30T
PIU2056
PIU1202
NLIN4
PIR5102
PIU5012 NLIN4024
PID1101
PIR5301
PIR5402
PIU9012
PIU1203
NLIN40T
PIU2058
PIU1402
NLIN5
PIR6102
PIU1601
NLIN5024
PID1901
PIR6301 PIR6402 PIU1403
PIU2001 NLIN50T
PIU2059
PIU1502
NLIN6
PIR6602
PIU1604
NLIN6024
PID1701
PIR6801
PIR6902 PIU1503
PIU2004 NLIN60T
PIU2061
PIU1802
NLIN7
PIR7602
PIU16010 NLIN7024
PID2001 PIR8002
PIR8302 PIU1803
PIU20010
NLIN70T
PIU2062
PIU1902
NLIN8
PIR8502
PIU16013 NLIN8024
PID1801
PIR8702 PIR8802
PIU1903
PIU20012 NLIN80T
PIU2064
PIU2302
NLIN9
PIR9502
PIU2202
NLIN9024
PID2601
PIR9701 PIR9802 PIU2303
PIU2601 NLIN90T
PIU2065
PIU2402 NLIN10
PIR10202
PIU2205
NLIN10024
PID2501
PIR10601
PIR10702 PIU2403
PIU2605 NLIN100T
PIU2070
PIU2702
NLIN11
PIR11402
PIU22010 NLIN11024
PID2401
PIR11601 PIR11702
PIU2609
PIU2703
NLIN110T
PIU2071
PIU2802 NLIN12
PIR11902
PIU22013 NLIN12024
PID2301
PIR12101
PIR12202
PIU26012
PIU2803
NLIN120T
PIU2047
PIU3102
NLIN13
PIR12902
PIU2901
NLIN13024
PID3201
PIR13302 PIR13402 PIU3103
PIU3301
NLIN130T
PIU2046
PIU3202
NLIN14
PIR13802
PIU2904
NLIN14024
PID3001
PIR14002
PIR14102 PIU3203
PIU3304
NLIN140T
PIU2044
PIU3502
NLIN15
PIR14802
PIU2909 NLIN15024
PID3101 PIR15001
PIR15102 PIU33012 PIU3503
NLIN150T
PIU2043
PIU3602 NLIN16
PIR15302
PIU29012 NLIN16024
PID2901
PIR15501
PIR15602
PIU3309
PIU3603
NLIN160T
PIU2041
PIU3802 NLIN17
PIR16302
PIU3901 NLIN17024
PID3701
PIR16501
PIR16602 PIU3803
PIU4201 NLIN170T
PIU2040
PIU4002
NLIN18
PIR16802
PIU3904
NLIN18024
PID3501
PIR17001 PIR17102 PIU4003
PIU4204 NLIN180T
PIU204
PIU4302 NLIN19
PIR18202
PIU39010 NLIN19024
PID3801
PIR18402
PIR18502
PIU42010
PIU4303
NLIN190T
PIU203
PIU4402 NLIN20
PIR18702
PIU39013
NLIN20024
PID3601
PIR18902
PIR19002
PIU42012
PIU4403
NLIN200T
PIU201
PIU4702 NLIN21
PIR19702
PIU4602
NLIN21024
PID4401
PIR19901
PIR20402 PIU4703
PIU4901 NLIN210T
PIU2098
PIU4802
NLIN22
PIR20602
PIU4605
NLIN22024
PID4201
PIR20801 PIR20902 PIU4803
PIU4905 NLIN220T
PIU2096
PIU5102 NLIN23
PIR21602
PIU46010 NLIN23024
PID4301
PIR21801 PIR21902
PIU4909
PIU5103
NLIN230T
PIU2095
PIU5202
NLIN24
PIR22102
PIU46013 NLIN24024
PID4001
PIR22301
PIR22402
PIU49012
PIU5203
NLIN240T
PIR1401
PIU2081
NLLED1
PICN102
PIR1002
NLLED10OUT
PIR1501
PIU2080
NLLED2
PICN103
PIR1102
NLLED20OUT
PIR1601
PIU2079
NLLED3 PICN104
PIR802
NLLED30OUT
PIR1701
PIU2078
NLLED4 PICN105
PIR902
NLLED40OUT
PIJK102
PIU2023
NLM1
PIJK202
PIU2024
NLM2
PIJK302
PIU2025
NLM3
PIJK402
PIU2026 NLM4
PIJK502
PIU2029 NLM5
PIJK602
PIU2030
NLM6
PIJK702
PIU2031 NLM7
PIJK802
PIU2032 NLM8
PIJK902
PIU2035 NLM9
PIJK1002
PIU2036 NLM10
PIJK1102
PIU2015
NLM11 PIJK1202
PIU2016
NLM12
PIC2401
PIJ101
PIQ1102
PIQ1302
PIR2801
NLMOTOR0100
PIC2501
PIJ102
PIQ802
PIQ1602
PIR2901
NLMOTOR0100
PIC2201
PIJ201
PIQ902
PIQ1502
PIR2601
NLMOTOR0200
PIC2301
PIJ202
PIQ702
PIQ1802
PIR2701
NLMOTOR0200
PIC2701
PIJ301
PIQ2702
PIQ3102
PIR7801
NLMOTOR0300
PIC2801
PIJ302
PIQ2402
PIQ3302
PIR7901
NLMOTOR0300
PIC2901
PIJ401
PIQ2802
PIQ3202
PIR8101
NLMOTOR0400
PIC3001
PIJ402
PIQ2502
PIQ3402
PIR8201
NLMOTOR0400
PIC3501
PIJ501
PIQ3902
PIQ4402
PIR10401
NLMOTOR0500
PIC3601
PIJ502
PIQ3602
PIQ4702
PIR10501
NLMOTOR0500
PIC3301
PIJ601
PIQ4002
PIQ4202
PIR9901
NLMOTOR0600
PIC3401
PIJ602
PIQ3702
PIQ4602
PIR10001
NLMOTOR0600
PIC4001
PIJ701
PIQ5402
PIQ5702
PIR13501
NLMOTOR0700
PIC4101
PIJ702
PIQ5102
PIQ6002
PIR13601
NLMOTOR0700
PIC3801
PIJ801
PIQ5202
PIQ5602
PIR13101
NLMOTOR0800
PIC3901
PIJ802 PIQ4902
PIQ5902
PIR13201
NLMOTOR0800
PIC4301
PIJ901
PIQ6802
PIQ7102
PIR17201
NLMOTOR0900
PIC4401
PIJ902
PIQ6502
PIQ7402
PIR17301
NLMOTOR0900
PIC4501
PIJ1001
PIQ6902
PIQ7202
PIR17401
NLMOTOR01000
PIC4601
PIJ1002
PIQ6602
PIQ7502
PIR17501
NLMOTOR01000
PIC4901
PIJ1101
PIQ8002
PIQ8502
PIR20001
NLMOTOR01100
PIC5001
PIJ1102
PIQ7702
PIQ8802
PIR20101
NLMOTOR01100
PIC5101
PIJ1201
PIQ8102
PIQ8402
PIR20201
NLMOTOR01200
PIC5201
PIJ1202
PIQ7902
PIQ8702
PIR20301
NLMOTOR01200
PIC602 PIU2049
PIC702 PIU2073
PID102
PIL101 PIU102
PID201 PIR101
PID301
PIQ601 PIR2001
PID702 PIQ501
PIR1901
PID901 PIR2502 PIU603
PID1401 PIR4402 PIU1003
PID1501
PIR5902 PIU1303
PID1601
PIR7402 PIU1703
PID2101
PIR9302 PIU2103
PID2201
PIR11202 PIU2503
PID2701
PIR12702 PIU3003
PID2801 PIR14602
PIU3403
PID3301 PIR16102 PIU3703
PID3401 PIR18002
PIU4103
PID3901
PIR19502 PIU4503
PID4101 PIR21402 PIU5003
PIDS101 PIR1802
PIF101
PIQ502
PIQ101 PIR1402
PIQ103 PIR1001
PIQ201 PIR1502
PIQ203 PIR1101
PIQ301 PIR1602
PIQ303
PIR801
PIQ401 PIR1702
PIQ403
PIR901
PIQ701 PIU508
PIQ801 PIU503
PIQ901 PIU5011
PIQ1001 PIR2401
PIQ1003 PIR2101 PIR2201
PIQ1101 PIU506
PIQ1201 PIR3301
PIQ1203 PIR3001 PIR3101
PIQ1301 PIU906 PIQ1401 PIR3801
PIQ1403 PIR3501 PIR3601
PIQ1601 PIU903
PIQ1701 PIR4301
PIQ1703 PIR4001 PIR4101
PIQ1801 PIU908
PIQ1901 PIR4802
PIQ1903 PIR4501 PIR4601
PIQ2001 PIR5302
PIQ2003 PIR5001 PIR5101
PIQ2101 PIR5801
PIQ2103 PIR5501 PIR5601
PIQ2201 PIR6302
PIQ2203 PIR6001 PIR6101
PIQ2301 PIR6802
PIQ2303 PIR6501 PIR6601
PIQ2401 PIU1603
PIQ2501 PIU1608
PIQ2601 PIR7301
PIQ2603 PIR7001 PIR7101
PIQ2701 PIU1606
PIQ2801 PIU16011
PIQ2901 PIR8001
PIQ2903 PIR7501 PIR7601
PIQ3001 PIR8701
PIQ3003 PIR8401 PIR8501
PIQ3101 PIU2006
PIQ3201 PIU20011
PIQ3301 PIU2003
PIQ3401 PIU2008
PIQ3501 PIR9201
PIQ3503 PIR8901 PIR9001
PIQ3601 PIU2203 PIQ3701 PIU2208
PIQ3801 PIR9702
PIQ3803 PIR9401 PIR9501
PIQ3901 PIU2206 PIQ4001 PIU22011
PIQ4101 PIR10602
PIQ4103 PIR10101 PIR10201
PIQ4201 PIU26011
PIQ4301 PIR11101
PIQ4303 PIR10801 PIR10901
PIQ4401 PIU2606
PIQ4501 PIR11602
PIQ4503 PIR11301 PIR11401
PIQ4601 PIU2608
PIQ4701 PIU2603
PIQ4801 PIR12102
PIQ4803 PIR11801 PIR11901
PIQ4901 PIU2908 PIQ5001 PIR12601
PIQ5003 PIR12301 PIR12401
PIQ5101 PIU2903 PIQ5201 PIU29011
PIQ5301 PIR13301
PIQ5303 PIR12801 PIR12901
PIQ5401 PIU2906
PIQ5501 PIR14001
PIQ5503 PIR13701 PIR13801
PIQ5601 PIU3308
PIQ5701 PIU3306
PIQ5801 PIR14501
PIQ5803 PIR14201 PIR14301
PIQ5901 PIU33011
PIQ6001 PIU3303
PIQ6101 PIR15002
PIQ6103 PIR14701 PIR14801
PIQ6201 PIR15502
PIQ6203 PIR15201 PIR15301
PIQ6301 PIR16001
PIQ6303 PIR15701 PIR15801
PIQ6401 PIR16502
PIQ6403 PIR16201 PIR16301
PIQ6501 PIU3903 PIQ6601 PIU3908
PIQ6701 PIR17002
PIQ6703 PIR16701 PIR16801
PIQ6801 PIU3906 PIQ6901 PIU39011
PIQ7001 PIR17901
PIQ7003 PIR17601 PIR17701
PIQ7101 PIU4206 PIQ7201 PIU42011
PIQ7301 PIR18401
PIQ7303 PIR18101 PIR18201
PIQ7401 PIU4203 PIQ7501 PIU4208
PIQ7601 PIR18901
PIQ7603 PIR18601 PIR18701
PIQ7701 PIU4603
PIQ7801 PIR19401
PIQ7803 PIR19101 PIR19201
PIQ7901 PIU4608
PIQ8001 PIU4606
PIQ8101 PIU46011
PIQ8201 PIR19902
PIQ8203 PIR19601 PIR19701
PIQ8301 PIR20802
PIQ8303 PIR20501 PIR20601
PIQ8401 PIU49011
PIQ8501 PIU4906
PIQ8601 PIR21301
PIQ8603 PIR21001 PIR21101
PIQ8701 PIU4908
PIQ8801 PIU4903
PIQ8901 PIR21802
PIQ8903 PIR21501 PIR21601
PIQ9001 PIR22302
PIQ9003 PIR22001 PIR22101
PIR302 PIU2037
PIR2302 PIU601
PIR3202 PIU701
PIR3702 PIU801
PIR4202 PIU1001
PIR4702 PIU1101
PIR5202 PIU1201
PIR5702 PIU1301
PIR6202 PIU1401
PIR6702 PIU1501
PIR7202 PIU1701
PIR7702 PIU1801
PIR8602 PIU1901
PIR9102 PIU2101
PIR9602 PIU2301
PIR10302 PIU2401
PIR11002 PIU2501
PIR11502 PIU2701
PIR12002 PIU2801
PIR12502 PIU3001
PIR13002 PIU3101
PIR13902 PIU3201
PIR14402 PIU3401
PIR14902 PIU3501
PIR15402 PIU3601
PIR15902 PIU3701
PIR16402 PIU3801
PIR16902 PIU4001
PIR17802 PIU4101
PIR18302 PIU4301
PIR18802 PIU4401
PIR19302 PIU4501
PIR19802 PIU4701
PIR20702 PIU4801
PIR21202 PIU5001
PIR21702 PIU5101
PIR22202 PIU5201
PIR23302 PIU5308
PIR23402 PIU5303 PIR23502 PIU5306
PIR23602 PIU53011
PIR24502 PIU5408
PIR24602 PIU54011
PIR24702 PIU5403 PIR24802 PIU5406
PIR25702 PIU5508
PIR25802 PIU5506
PIR25902 PIU55011
PIR26002 PIU5503
PIU207
PIU2017
PIU2018
PIU2033
PIU2034
PIU2038
PIU2039
PIU2067
PIU2077
PIU2082
PIU2083
PIU2084 PIU2085
PIU2086
PIU2087
PIU2088
PIU2089
PIU2090 PIU2091
PIU208
NLOSC320IN
PIU209 NLOSC320OUT
PIC1002
PIU2012
PIY102
NLOSCIN
PIC902
PIU2013 PIY101 NLOSCOUT
PIC802
PIR501 PIS102
PIU2014
NLR\E\S\E\T\
PID4502
PID4602 PID4702
PID4802
PID4902
PID5002
PID5102 PID5202
PID5302
PID5402
PID5502
PID5602
PIU402
PIR1202
PIU2092
PIU306
NLSCL
PIR1301
PIU2093
PIU305
NLSDA
PIP202
PIR601
PIU2076
NLSWD0CLK
PIP204
PIR701
PIU2072 NLSWD0DAT
PIQ1501 PIU9011
NLU3011
PIP103
PIU2069
NLUART0RX
PIP102
PIU2068
NLUART0TX
PIC2101
PIC2602
PIC3102
PIC3702
PIC4202
PIC4702
PIC5302
PID802
PIFB101
PIQ503
PIU604
PIU704
PIU804
PIU9014
PIU1004
PIU1104
PIU1204
PIU1304
PIU1404
PIU1504
PIU1704
PIU1804
PIU1904
PIU20014
PIU2104
PIU2304
PIU2404
PIU2504
PIU26014
PIU2704
PIU2804
PIU3004
PIU3104
PIU3204
PIU33014
PIU3404
PIU3504
PIU3604
PIU3704
PIU3804
PIU4004
PIU4104
PIU42014
PIU4304
PIU4404
PIU4504
PIU4704
PIU4804
PIU49014
PIU5004
PIU5104
PIU5204
PIU53014
PIU54014
PIU55014
Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
(b) 5-3.3V regulator AMS1117-3V3.
Figure 3.9: First version of the voltage regulation design.
To improve the performance of regulation, the buck switching regulator LM2596S
(24V-5V) and LDO LM1117 (5V-3.3V) are finally adopted. They have higher fre-
quency internal oscillator and conversion efficiency, and provide larger current. More
importantly, bypass and polar capacitors are added to filter the signal interference and
protect the power supply module. Figure 3.10 details the second version of voltage
regulation design.
(a) 24V-5V regulator LM2596S-5. (b) 5V-3.3V regulator LM1117-3V3.
Figure 3.10: Second version of the voltage regulation design.
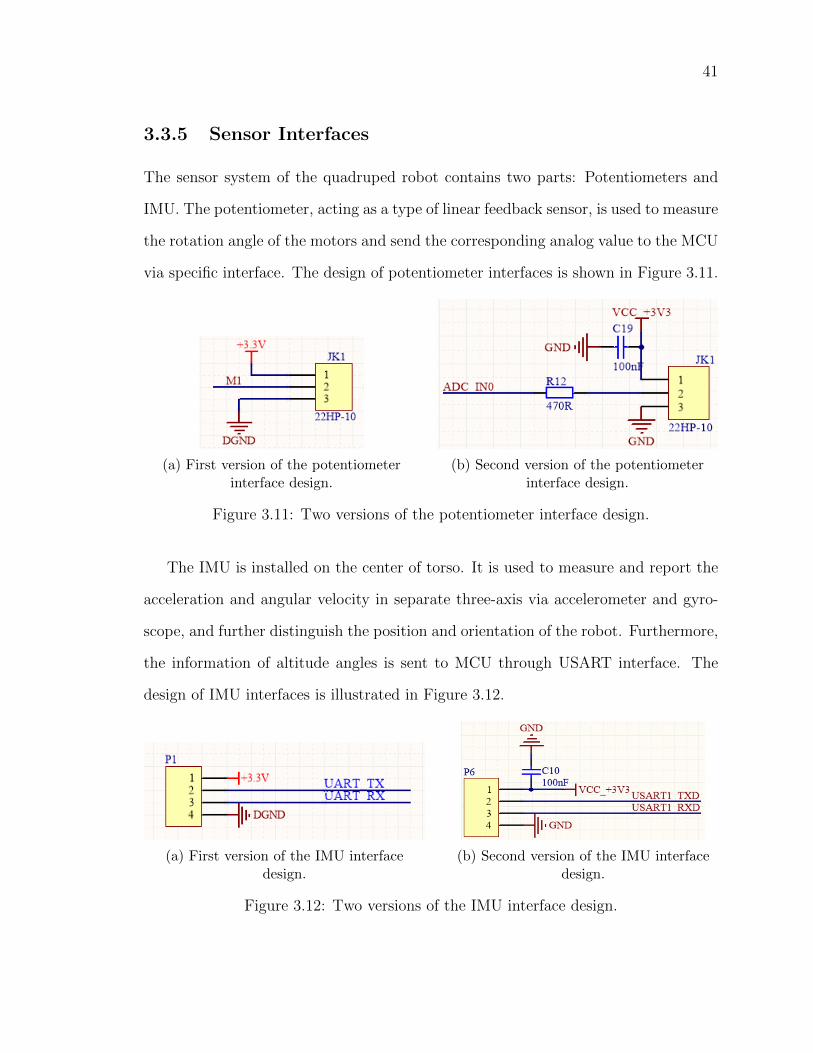
41
3.3.5 Sensor Interfaces
The sensor system of the quadruped robot contains two parts: Potentiometers and
IMU. The potentiometer, acting as a type of linear feedback sensor, is used to measure
the rotation angle of the motors and send the corresponding analog value to the MCU
via specific interface. The design of potentiometer interfaces is shown in Figure 3.11.
(a) First version of the potentiometerinterface design.
(b) Second version of the potentiometerinterface design.
Figure 3.11: Two versions of the potentiometer interface design.
The IMU is installed on the center of torso. It is used to measure and report the
acceleration and angular velocity in separate three-axis via accelerometer and gyro-
scope, and further distinguish the position and orientation of the robot. Furthermore,
the information of altitude angles is sent to MCU through USART interface. The
design of IMU interfaces is illustrated in Figure 3.12.
(a) First version of the IMU interfacedesign.
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
(b) Second version of the IMU interfacedesign.
Figure 3.12: Two versions of the IMU interface design.

42
3.4 PCB Design
3.4.1 Overview
The printed circuit board [54] helps to connect the electronics components with pads,
tracks and lines incorporated on a laminated copper sheet. The PCB process converts
the electronic circuit schematic diagram into a physical circuit board layout, which
is widely used in the advanced electronics and automatic control systems. There are
mainly three types of PCBs: Single-sided, double-sided and multi-layer PCB, depend-
ing on the number of layers used in the boards as well as the practical requirements.
PCB is composed of different layers that are joined together with the help of heat and
adhesive. The layer structure with thickness descriptions of the designed double-sided
PCB is illustrated in Figure 3.13.
Silkscreen
Solder mask
0.4mmSignal
1.4mm
Substrate
12.6mm
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 3.13: Layer structure of the designed double-sided PCB.
• Substrate layer
The substrate layer is composed of fiber glass. In our design, a composite material
“FR4” [55], instead of the phenolic resin, is adopted to build a solid substrate, which
provides good insulation and rigidity to the PCB.

43
• Signal (Copper) layer
The signal layer includes top and bottom layers, which is primarily used for placement
of components (top and bottom) and routing. The wires or other objects placed on
the surface are in the areas covered with copper foil. For double-sided PCB, there
are two copper layers, which is applied to both sides of the substrate.
• Solder mask layer
Solder mask contains top and bottom solders, which is most commonly in green. It
is overlaid onto the copper layer to insulate the traces from accidental contact with
other conductive components. Apart from this, solder mask is also able to prevent
copper traces from corrosion, oxidation and dirt.
• Silkscreen layer
Silkscreen is a layer of ink traces that is often applied on top of the solder mask
layer. Its main responsibility is to draw letters and identify components, or other
text information for easier assembly as well as indicators for better understanding
the board.
• Mechanical layer
The mechanical layer defines the appearance of the entire PCB board. It is generally
used to set the board’s physical dimensions, data markings, assembly instructions,
and other mechanical information.
The circuit schematic diagram and PCB layer structures are all designed in Altium
Designer. The process flow of PCB design is shown in Figure 3.14.

44
SCH/PCB
Component libraryStart Create schematic
SCH compile &
Footprint checking
Create PCB
dimensions
Create PCB
layer structure
Join SCH netlist
with PCB
Route tracesDesign rules for
routing
Place componentsDesign rules for
parts placement
Rule
check
Rule
check
Design rules for
copper poursCopper pours
Rule
check
Design rules for
DRC checking
Design rules for
DRC checking
Rule
check
Manufacturing Finish
fail
fail
fail
fail
pass
pass
pass
pass
Powered by TCPDF (www.tcpdf.org) Powered by TCPDF (www.tcpdf.org)Powered by TCPDF (www.tcpdf.org)
Figure 3.14: Process flow of the PCB design.

45
3.4.2 Power Distribution
In the first version, the MCU is powered by 3.3V and is placed in the center of PCB.
To actuate the motor drive, gate driver ICs are driven by the 5V regulated power.
The 24V power tracks are routed on the edge of the printed circuit board for actuating
12 DC motors. The original design of the power distribution is shown in Figure 3.15.
(a) 3.3V for MCU v1.
(b) 5V for motor drive v1.
(c) 24V for motor v1.
Figure 3.15: First version of the power distribution design.
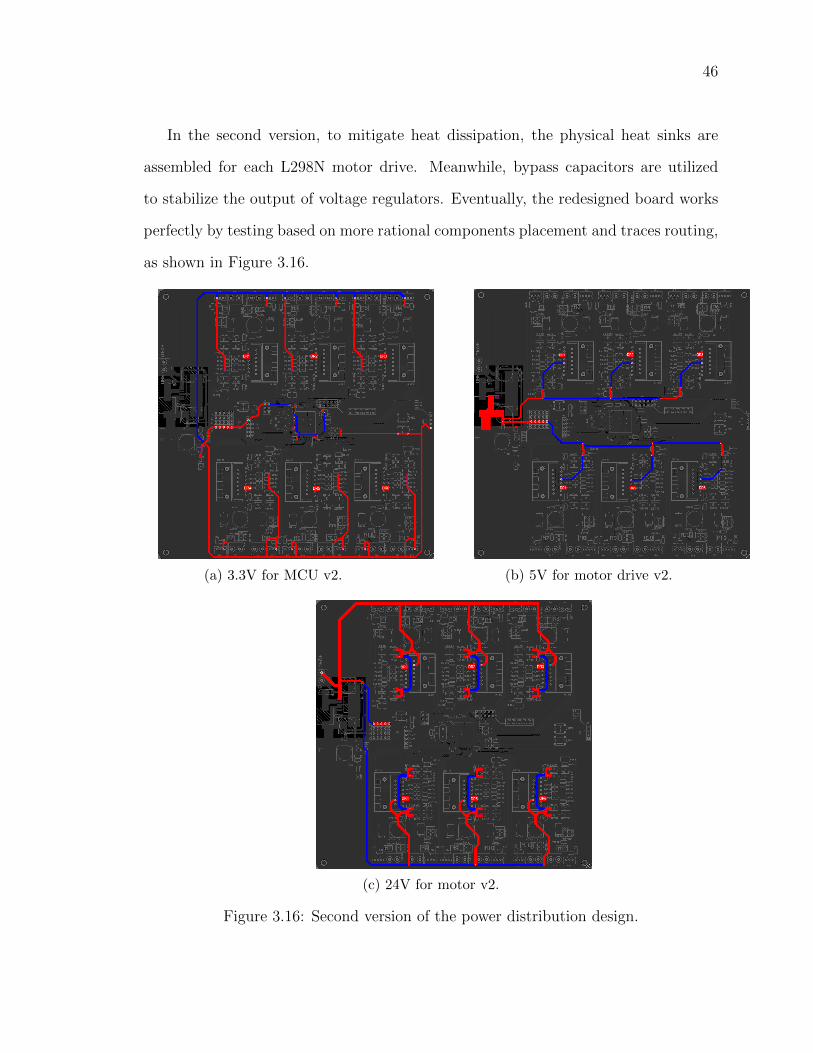
46
In the second version, to mitigate heat dissipation, the physical heat sinks are
assembled for each L298N motor drive. Meanwhile, bypass capacitors are utilized
to stabilize the output of voltage regulators. Eventually, the redesigned board works
perfectly by testing based on more rational components placement and traces routing,
as shown in Figure 3.16.
(a) 3.3V for MCU v2. (b) 5V for motor drive v2.
(c) 24V for motor v2.
Figure 3.16: Second version of the power distribution design.
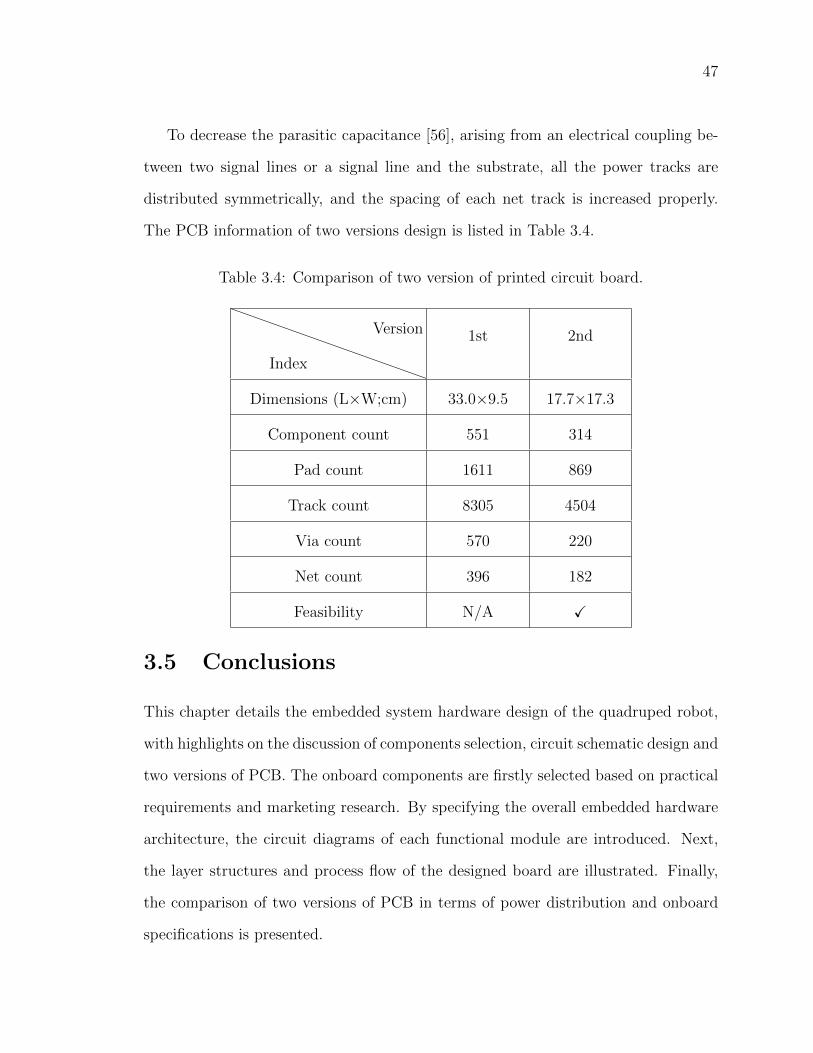
47
To decrease the parasitic capacitance [56], arising from an electrical coupling be-
tween two signal lines or a signal line and the substrate, all the power tracks are
distributed symmetrically, and the spacing of each net track is increased properly.
The PCB information of two versions design is listed in Table 3.4.
Table 3.4: Comparison of two version of printed circuit board.
Index
Version 1st 2nd
Dimensions (L×W;cm) 33.0×9.5 17.7×17.3
Component count 551 314
Pad count 1611 869
Track count 8305 4504
Via count 570 220
Net count 396 182
Feasibility N/A X
3.5 Conclusions
This chapter details the embedded system hardware design of the quadruped robot,
with highlights on the discussion of components selection, circuit schematic design and
two versions of PCB. The onboard components are firstly selected based on practical
requirements and marketing research. By specifying the overall embedded hardware
architecture, the circuit diagrams of each functional module are introduced. Next,
the layer structures and process flow of the designed board are illustrated. Finally,
the comparison of two versions of PCB in terms of power distribution and onboard
specifications is presented.

48
Chapter 4
Joint Motion System Design and
Tests
4.1 Introduction
This chapter presents the experimental studies that have been conducted during the
development process of the robot joint motion system. These studies are centered on
the hardware testing, software design and joint motion experiments in Section 4.2,
4.3 and 4.4, respectively. Since the hip joints are not yet fully operational, mechanical
structural problems and solutions are given in Section 4.5.
In the first study, the potentiometers and motors are tested and used to setup
the system experimental platform. In the second study, the moving average filter
based cascaded PID control strategy is designed, aiming to control the motor position
and speed, meanwhile, smooth out the random noise in the process of sensor data
acquisition. Finally, the designed control algorithm is implemented on two types
of joints and the corresponding control performance is tested. The experimental
platform of the quadruped robot is shown in Figure 4.1.

49
Figure 4.1: Experimental platform of the quadruped robot.
4.2 Hardware Tests
In addition to the designed embedded system, as mentioned in Chapter 3, the po-
tentiometers and motors are essential devices that are further tested and selected to
constitute the robot experimental platform.
4.2.1 Potentiometer Selection
1
2
3
Ω , Ω ,
Ω ,
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
(a) (b)
Figure 4.2: Potentiometer schematic representation.

50
• Modeling
The rotational potentiometer is used to measure the angular position of the motor
and further transmit the corresponding analog value to the microcontroller. As shown
in Figure 4.2, terminal 1 and 3 are connected to a resistor element and terminal 2 is
connected to an adjustable wiper. Commonly, we have
Ω1,3 = Ω1,2 + Ω2,3. (4.1)
where Ω1,3, Ω1,2 and Ω2,3 are the resistance between terminal 1 and 3, terminal 1
and 2 and terminal 2 and 3, respectively. More importantly, Ω2,3 should satisfy the
resistance taper [57] as follows:
Ω2,3 = kiθ. (4.2)
where k, i, θ denote the taper gradient, the number of potentiometer and the knob
position, respectively.
• Selection criteria
To select the proper potentiometers, the resistance taper must be linear and satisfies
Equation (4.2). Meanwhile, ki is computed and expected to be approximately equal
to the nominal gradient kn with linearity tolerance of 0.25% [58]. That is, the taper
gradient ki should satisfy
ki > 0, (4.3)
ki ∈ [99.75%kn, 100.25%kn]. (4.4)
• Test procedure
The resistance taper of the potentiometer is tested as follows. Firstly, we measure
the maximum resistance Ω1,3 by putting the probes of ohmmeter on the terminal 1
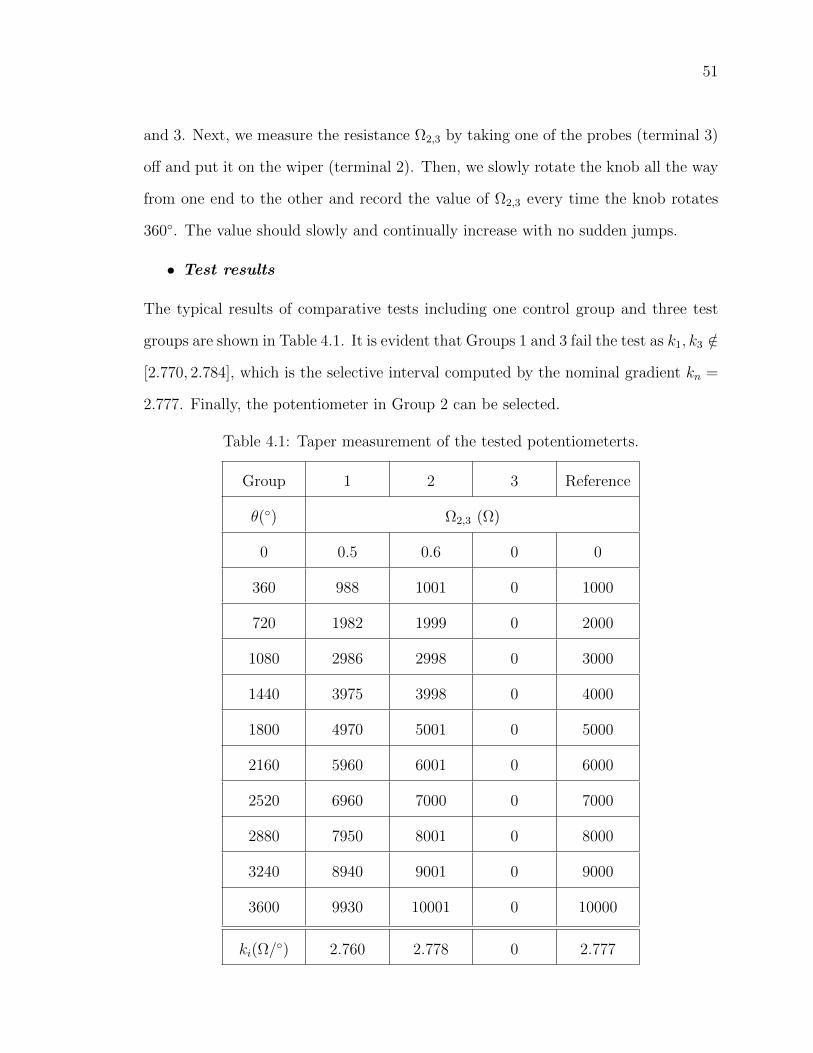
51
and 3. Next, we measure the resistance Ω2,3 by taking one of the probes (terminal 3)
off and put it on the wiper (terminal 2). Then, we slowly rotate the knob all the way
from one end to the other and record the value of Ω2,3 every time the knob rotates
360. The value should slowly and continually increase with no sudden jumps.
• Test results
The typical results of comparative tests including one control group and three test
groups are shown in Table 4.1. It is evident that Groups 1 and 3 fail the test as k1, k3 /∈
[2.770, 2.784], which is the selective interval computed by the nominal gradient kn =
2.777. Finally, the potentiometer in Group 2 can be selected.
Table 4.1: Taper measurement of the tested potentiometerts.
Group 1 2 3 Reference
θ() Ω2,3 (Ω)
0 0.5 0.6 0 0
360 988 1001 0 1000
720 1982 1999 0 2000
1080 2986 2998 0 3000
1440 3975 3998 0 4000
1800 4970 5001 0 5000
2160 5960 6001 0 6000
2520 6960 7000 0 7000
2880 7950 8001 0 8000
3240 8940 9001 0 9000
3600 9930 10001 0 10000
ki(Ω/) 2.760 2.778 0 2.777

52
4.2.2 Motor Selection
Considering the limitation of resolution and bounded measurement range of the poten-
tiometer, an estimation method is used to select the motors with similar performance.
That is, we aim to test the rotational speed for each motor under the same condition
by setting the PWM duty cycle at 100% and transmitting the measured data via the
same motor interface. The test procedure is shown as follows:
• Step 1: Set starting position
We first set the motor starting position, where is close but not strictly equal to the
maximum rotation angle (3600) of the potentiometer, such that the first sampled
data is located in the measurement range with linear taper. Meanwhile, we take 3
test groups for each motor with different starting positions.
• Step 2: Compute rotational speed for each test group
For each test group, the valid data is extracted by discarding the first sampled element.
The rotational speed of the j th (j =1, 2, 3) test group for the ith (i=1, 2,...18) motor,
denoted by Vij, is calculated by the rotation angle per second.
• Step 3: Compute average rotational speed for each motor
Based on the previous step, the average rotation speed of the ith motor, denoted by
Vi, is computed as
Vi =1
j
3∑j=1
Vij (4.5)
• Step 4: Select the motors
We further compute Vi for all the motors and select 12 of those that feature the
similar rotational speed, which help reduce the development time. The test results of
the computed rotational speed for 18 motors are listed in Table 4.2.

53
Table 4.2: Test and selection results of 18 motors.
Motor No. 1 2 3 4 5 6 7 8 9
Vi(/s) 615.8 675.5 412.4 512.8 692.8 667.1 649.6 628.2 656.5
Selection X X X X X
Motor No. 10 11 12 13 14 15 16 17 18
Vi(/s) 645.8 629.6 705.7 614.0 654.5 636.2 588.9 634.6 673.0
Selection X X X X X X X
4.3 Software Design
4.3.1 Firmware Configuration
Firmware is programmed to provide permanent instructions to communicate with
other devices and perform basic input/output tasks. It is a packaged program that
resides in the microcontroller. To provide a standardized operating environment for
the software, the firmware is configured in advance.
In our design, the firmware is configured in STM32CubeMX, which is a graphical
configuration and low level code generation tool for STM32 ARM Cortex-M microcon-
troller. We first select the peripherals to be used by assigning pins to their inputs and
outputs. Meanwhile, independent GPIOs are also configured. Next, the system clock
is inspected and configured. The “Clock Configuration” tab provides a schematic
overview of the clock path, along with the clock sources. After all the embedded
software components have been configured and validated, we finally generate the ini-
tialization code in C. This code can be used in various development environments,
i.e., Keil MDK, GCC, IAR, etc. The pinout and clock configuration are illustrated
in Figure 4.3 and 4.4, respectively.

54
Figure 4.3: Pin configuration of the microcontroller.
Figure 4.4: Clock configuration of the microcontroller.
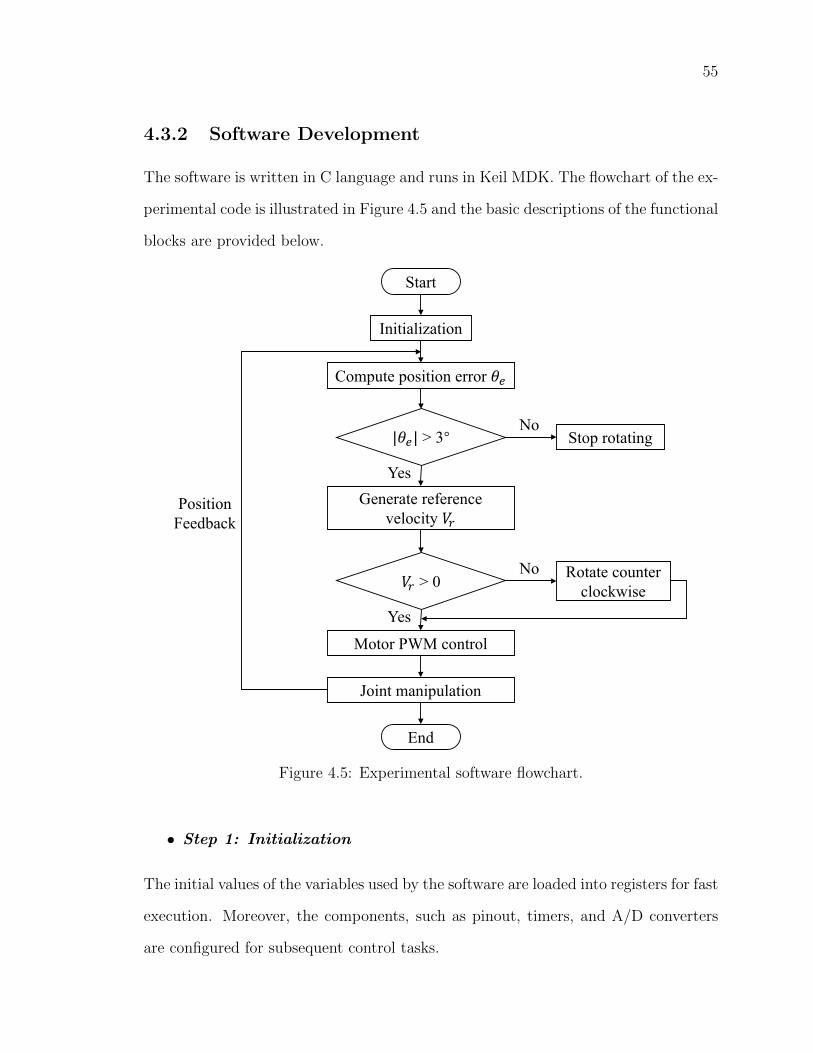
55
4.3.2 Software Development
The software is written in C language and runs in Keil MDK. The flowchart of the ex-
perimental code is illustrated in Figure 4.5 and the basic descriptions of the functional
blocks are provided below.
Initialization
Compute position error 𝜃𝜃𝑒𝑒|𝜃𝜃𝑒𝑒| > 3° Stop rotating
Generate reference
velocity 𝑉𝑉𝑟𝑟𝑉𝑉𝑟𝑟 > 0
Rotate counter
clockwise
Motor PWM control
Joint manipulation
No
No
Yes
Yes
Position
Feedback
Start
EndPowered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 4.5: Experimental software flowchart.
• Step 1: Initialization
The initial values of the variables used by the software are loaded into registers for fast
execution. Moreover, the components, such as pinout, timers, and A/D converters
are configured for subsequent control tasks.

56
• Step 2: Compute position error
Given the desired position θr, the analog value of the actual position is measured by
the potentiometer and sent to the A/D converter while further converted into the
actual position θa. The position error θe is calculated as
θe = θr − θa. (4.6)
• Step 3: Generate reference velocity
The position error θe is then compared with a preset dead zone, specified as 3. If
θe < 3, the motor would brake and stop rotating. Otherwise, the reference velocity
Vr is generated by the position controller.
• Step 4: Motor PWM control
The reference velocity serves as the input of the velocity controller to output the
corresponding PWM signal, which controls the motor speed and therefore, the angular
position θa.
• Step 5: Joint manipulation
The robot joints are manipulated by the mounted motors. Meanwhile, the program
completes one execution cycle and returns to Step 2.
4.3.3 MAF Algorithm Design
The potentiometer rotates at the same angular velocity along with the corresponding
motor and outputs the analog signal, which is proportional to the rotation angle.
During the experiment, however, measurement errors are existed, therefore, we first
test the taper of the potentiometers to eliminate the systematic error coming from
the sensors.
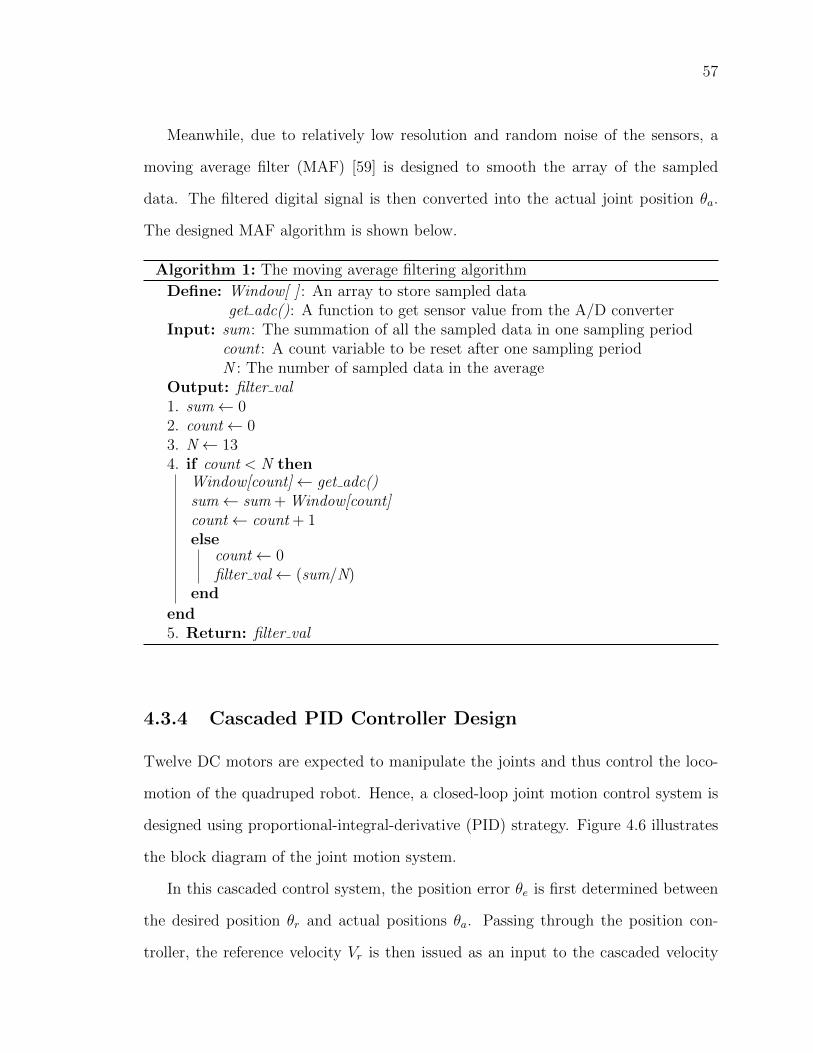
57
Meanwhile, due to relatively low resolution and random noise of the sensors, a
moving average filter (MAF) [59] is designed to smooth the array of the sampled
data. The filtered digital signal is then converted into the actual joint position θa.
The designed MAF algorithm is shown below.
Algorithm 1: The moving average filtering algorithm
Define: Window[ ] : An array to store sampled dataget adc(): A function to get sensor value from the A/D converter
Input: sum: The summation of all the sampled data in one sampling periodcount : A count variable to be reset after one sampling periodN : The number of sampled data in the average
Output: filter val1. sum← 02. count← 03. N← 134. if count < N then
Window[count]← get adc()sum← sum + Window[count]count← count + 1else
count← 0filter val← (sum/N)
end
end5. Return: filter val
4.3.4 Cascaded PID Controller Design
Twelve DC motors are expected to manipulate the joints and thus control the loco-
motion of the quadruped robot. Hence, a closed-loop joint motion control system is
designed using proportional-integral-derivative (PID) strategy. Figure 4.6 illustrates
the block diagram of the joint motion system.
In this cascaded control system, the position error θe is first determined between
the desired position θr and actual positions θa. Passing through the position con-
troller, the reference velocity Vr is then issued as an input to the cascaded velocity
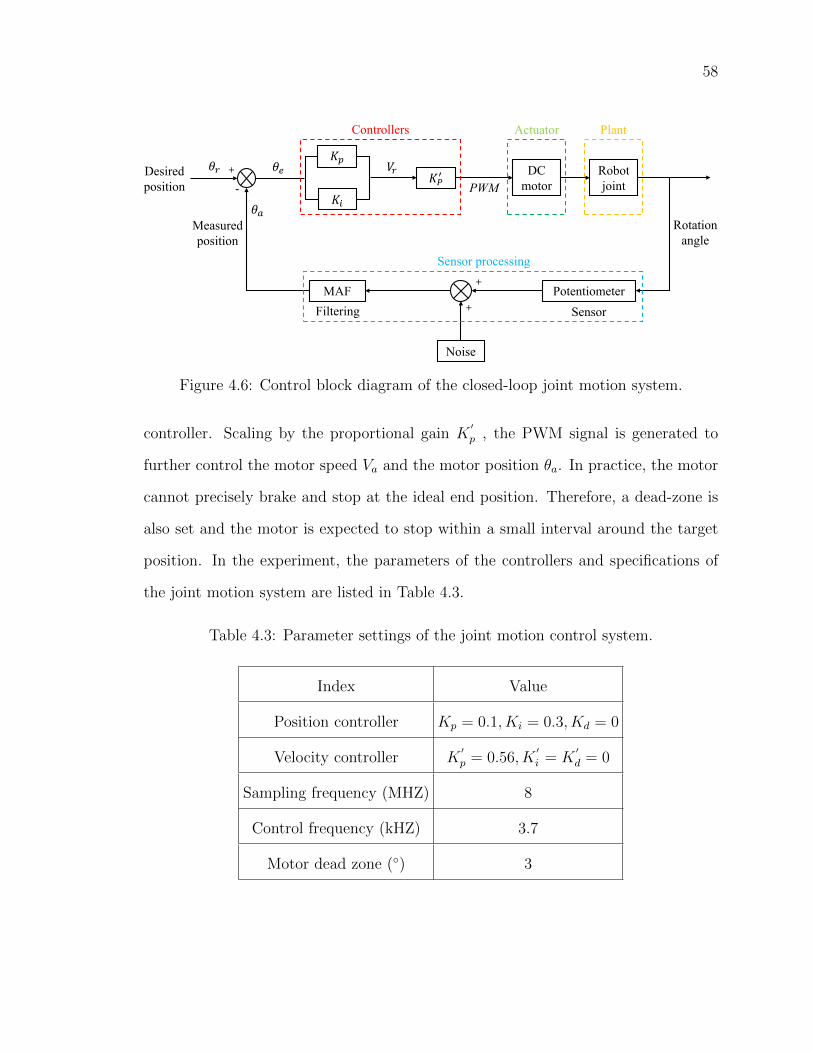
58
Desired
position
Controllers
+
-
+
+
Measured
position
Sensor
Noise
Filtering
𝐾𝐾𝑝𝑝𝐾𝐾𝑖𝑖 𝐾𝐾𝑃𝑃′ DC
motor
Robot
joint
Actuator
PotentiometerMAF
Sensor processing
Plant
PWM
𝑉𝑉𝑟𝑟𝜃𝜃𝑒𝑒𝜃𝜃𝑟𝑟𝜃𝜃𝑎𝑎
Rotation
angle
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 4.6: Control block diagram of the closed-loop joint motion system.
controller. Scaling by the proportional gain K′p , the PWM signal is generated to
further control the motor speed Va and the motor position θa. In practice, the motor
cannot precisely brake and stop at the ideal end position. Therefore, a dead-zone is
also set and the motor is expected to stop within a small interval around the target
position. In the experiment, the parameters of the controllers and specifications of
the joint motion system are listed in Table 4.3.
Table 4.3: Parameter settings of the joint motion control system.
Index Value
Position controller Kp = 0.1, Ki = 0.3, Kd = 0
Velocity controller K′p = 0.56, K
′i = K
′
d = 0
Sampling frequency (MHZ) 8
Control frequency (kHZ) 3.7
Motor dead zone () 3

59
4.4 Joint Motion Experiments
4.4.1 Knee Joint Test
For convenience, the robot is firstly turned over, as illustrated in Figure 4.7. We aim
to manipulate the knee joint into rotating from the actual position θa = 1980 to
the desired position θr = 1780. Meanwhile, the angular velocity is required to be
decreasing when approaching to the destination. Moreover, the performance of the
joints motion in filtered and unfiltered case is tested and the results are shown in
Figure 4.8.
(a) (b)
Figure 4.7: Knee joint rotates from position (a) to (b) in handstand status.
1750
1800
1850
1900
1950
2000
0 1 2 3 4 5 6 7 8 9 10 11 12
Join
t posi
tion
(°)
Time (sec)
Filtered Unfiltered
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 4.8: Comparison of filtered and unfiltered joint control.

60
Originally, the objective cannot be achieved when applying the designed control
strategy without filtering. As a matter of fact, the motor rotates back and forth
around the target position. In addition, the fluctuation range is measured around
26.4, which is greatly larger than the preset dead-zone, as shown by the red curve.
However, after adding the designed MAF and tuning the controller parameters, the
joint vibration issue is finally addressed, and all the motor can brake and stop within
the preset dead-zone, as illustrated by the blue curve. Thus, the angular position of
the knee joint can be controlled.
Next, we recover the robot in standing posture with four legs hanging in the air,
and repeat the same test on the knee joint, as pictured in Figure 4.9 (a). The results
show that the knee joint can stop at the desired position in Figure 4.9 (b) and verify
the feasibility of the proposed joint motion control algorithm.
(a) (b)
Figure 4.9: Knee joint rotates from position (a) to (b) in “standing” status.
4.4.2 Hip Joint Test
The test of hip joint is not exactly the same as knee joint because of the different
mechanical structure and degrees of freedom. Two motors are coupled to be controlled
simultaneously, and to complete the motion with cooperation, which increases the
complexity of parameter tuning.

61
In handstand status, the hip joint can somehow reach the set position only if the
leg rotates in vertical plane ideally. However, it fails in most cases. The screws used
to set the joint mechanical structure become loose when the motor is rotating, and
consequently, the torque cannot be transmitted from the motor to the hip joint. In
“standing” status, test also fails due to the same reasons. Therefore, the mechanism
of the hip joint needs to be further revised or redesigned.
4.5 Structural Problems and Solutions in Mechan-
ical Design
During the experiment, the mechanical structure of the hip joint is found unreli-
able and has negative influence on the motion performance. Moreover, solutions are
required to eliminate the problems of loose screws.
• Motor and brass shaft
A screw assembled to fix the motor shaft and brass shaft will loose when rotating. As
a result, the torque cannot be transmitted from the motor to the brass shaft. Instead
of screw fixation, the keyed joint structure [60] is preferable, which can effectively
protect the motor shaft, and meanwhile extend its service life.
• Bevel gear and pulley
Similarly, the screws used to fix bevel gear 1 and pulley 2 on the shaft sleeve are always
loose, which leads to asynchronous rotation between these two components. To solve
this, a keyway is firstly machined on the shaft sleeve and a proper standard key is
then selected. The keyed joint restricts the relative rotational movement between the
shaft and rotation element, and guarantees torque transmission. The same structural
solution is applicable to the bevel gear 2 and pulley 3, as illustrated in Figure 4.10.

62
Rotation element
Key
Keyway
Shaft sleeve
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 4.10: Keyed joint connection between bevel gear and shaft sleeve.
4.6 Conclusions
Software and hardware are indispensable parts to set up the experiment platform.
In our design, the hardware including motors and sensors is firstly tested and picked
out for the experiment. In addition, firmware is configured in STM32CubeMX and
software is then developed specifically for motor control.
Next, a closed-loop joint motion control system is presented. The cascaded PID
control law is designed and is implemented to control the position and velocity of the
motors. To reduce random noise, the MAF is also designed for sensor processing.
In addition, the joint motion experiments are conducted. The results show that
the knee joint is able to rotate at different speed and finally stop at the desired
position. Meanwhile, feasibility of the designed joint motion control algorithm is
verified.

63
Chapter 5
Conclusions and Future Work
5.1 Conclusions
In this thesis, the embedded system design and joint motion control of a quadruped
robot have been presented.
The overall structures and specifications of the quadruped robot have been intro-
duced in Chapter 2. By analyzing the joint structures, the motion mechanism of
the robot legs and two walking patterns have been illustrated. Moreover, the detailed
development procedures of this project have been discussed.
The embedded system hardware design of the quadruped robot has been presented
in Chapter 3. According to the functional requirements and marketing research, the
onboard components of the embedded system have been selected. By illustrating the
hardware architecture, the circuit schematic diagrams for all functional modules have
been introduced. The PCB information and comparison of two versions design have
been provided.
The MAF-based cascaded PID control strategy for dealing with the robot joint
motion system has been proposed in Chapter 4. With the combination of hardware

64
testing, firmware configuration, and software development, the robot experimental
platform has been setup. To control the motor position and velocity, cascaded PID
controllers have been designed and implemented on two types of joints. In addition,
the moving average filter has been added to reduce the noise and obtain reliable
sampled data. Finally, the experimental tests have been conducted to verify the
effectiveness of the proposed control algorithm.
5.2 Future Work
The results of this work open a variety of interesting areas and the quadruped robot
can be further developed from the following aspects.
• Improvement of the robot leg structure
The existing leg structure can be redesigned to effectively transmit the actuator torque
to the operational joints. Two DOFs of the hip joint can be designed separately to
decrease the difficulty of assembly and control strategy implementation. Moreover,
an additional passive ankle joint is considered for rough terrain mobility, as shown in
Figure 5.1.
Hip pitch
Hip yaw
Ankle pitch (passive)
Knee pitch
yaw
rollpitch
Powered by TCPDF (www.tcpdf.org)
Powered by TCPDF (www.tcpdf.org)
Figure 5.1: Leg structure with three active joints and one passive joint [61].
65
• Selection of actuator and sensor
The actuators and sensors can be more appropriately selected. The motor with high
reduction ratio can be utilized not only to enlarge the output torque, but also to
reduce the moment of inertia for quick motion and response. To increase environment
perception of the robot, different types of sensors can be used to complete certain
tasks.
• Hierarchical network communication
Similar to the PCB structure, the robotic control consists of different layers, which
contain either singular or multiple parallel processes. By using hybrid control [62], the
robot behavior can be governed. Typically, the structure of hybrid control includes
low level, mid level, and high level.
To further control the robot locomotion, we should develop the hierarchical struc-
ture of the robot, and embed it in the practical control system. The online vision-
based system can be applied to conduct image processing using FPGA. Based on
the feedback data, local maps and walking patterns are generated by the high-level
controller. Additionally, the torque and position commands will be sent to the motor
for further control on the joint motion and robot locomotion.

66
Bibliography
[1] G. Piras, W. L. Cleghorn, and J. K. Mills, “Dynamic finite-element analysis
of a planar high-speed, high-precision parallel manipulator with flexible links,”
Mechanism and Machine Theory, vol. 40, no. 7, pp. 849–862, Jul. 2005.
[2] Z. Li, Z. Huang, and Y. Huang, “Design of spot welding robot,” TELKOMNIKA
Indonesian Journal of Electrical Engineering, vol. 11, no. 11, pp. 6267–6273, Nov.
2013.
[3] S. Kudoh, K. Ogawara, M. Ruchanurucks, and K. Ikeuchi, “Painting robot with
multi-fingered hands and stereo vision,” Robotics and Autonomous Systems, vol.
57, no. 3, pp. 279–288, Mar. 2009.
[4] P. McGuire, J. Fritsch, J. J. Steil, F. Rothling, G. A. Fink, S. Wachsmuth,
G. Sagerer, and H. Ritter, “Multi-modal human-machine communication for
instructing robot grasping tasks,” in Proceedings of IEEE/RSJ International
Conference on Intelligent Robots and Systems, vol. 2, pp. 1082–1088, Aug. 2002.
[5] A. Bechar and C. Vigneault, “Agricultural robots for field operations. Part 2:
Operations and systems,” Biosystems Engineering, vol. 153, pp. 110–128, Jan.
2017.

67
[6] M. Takahashi, T. Suzuki, H. Shitamoto, T. Moriguchi, and K. Yoshida, “Devel-
oping a mobile robot for transport applications in the hospital domain,” Robotics
and Autonomous Systems, vol. 58, no. 7, pp. 889–899, Jul. 2010.
[7] C. Wang and D. Du, “Research on logistics autonomous mobile robot system,” in
Proceedings of IEEE International Conference on Mechatronics and Automation,
pp. 275–280, Aug. 2016.
[8] C. H. Lee, S. H. Kim, S. C. Kang, M. S. Kim, and Y. K. Kwak, “Double-track
mobile robot for hazardous environment applications,” Advanced Robotics, vol.
17, no. 5, pp. 447–459, Jan. 2003.
[9] A. Preumont, P. Alexandre, I. Doroftei and F. Goffin, “A conceptual walking
vehicle for planetary exploration,” Mechatronics, vol. 7, no. 3, pp. 287–296, Apr.
1997.
[10] P. Fiorini, “Ground mobility systems for planetary exploration,” in Proceedings
of IEEE International Conference on Robotics and Automation, vol. 1, pp. 908-
913, Apr. 2000.
[11] T. Huntsberger, A. Stroupe, and B. Kennedy, “System of systems for space
construction,” in Proceedings of IEEE International Conference on Systems, Man
and Cybernetics, vol. 4, pp. 3173–3178, Oct. 2005.
[12] H. Hasunuma, K. Nakashima, M. Kobayashi, F. Mifune, Y. Yanagihara, T. Ueno,
K. Ohya, and K. Yokoi, “A tele-operated humanoid robot drives a backhoe,” in
Proceedings of IEEE International Conference on Robotics and Automation, vol.
3, pp. 2998–3004, Sep. 2003.

68
[13] M. A. Armada, M. Tavakoli, M. R. Zakerzadeh, G. R. Vossoughi, and S. Bagheri,
“A hybrid pole climbing and manipulating robot with minimum DOFs for con-
struction and service applications,” Industrial Robot: An International Journal,
vol. 32, pp. 171–178, Apr. 2005.
[14] Y. Mae, A. Yoshida, T. Arai, K. Inoue, K. Miyawaki, and H. Adachi, “Applica-
tion of locomotive robot to rescue tasks,” in Proceedings of IEEE International
Conference on Intelligent Robots and Systems, vol. 3, pp. 2083–2088, Nov. 2000.
[15] Y. Iwano, K. Osuka and H. Amano, “Development of stretcher component
robots for rescue activity,” in Proceedings of IEEE International Conference on
Robotics, Automation and Mechatronics, vol. 2, pp. 915–920, Dec. 2004.
[16] Y. Ogura, H. Aikawa, K. Shimomura, H. Kondo, A. Morishima, H. O. Lim, and
A. Takanishi, “Development of a new humanoid robot WABIAN-2,” in Proceed-
ings of IEEE International Conference on Robotics and Automation, pp. 76–81,
May. 2006.
[17] H. Lim, Y. Sugahara, and A. Takanishi, “Development of a biped locomotor
applicable to medical and welfare fields,” in Proceedings of IEEE/ASME In-
ternational Conference on Advanced Intelligent Mechatronics, pp. 950–955, Jul.
2003.
[18] J. M. Conrad, “Stiquito for robotics and embedded systems education,” Com-
puter, vol. 38, no. 6, pp. 77–81, Jun. 2005.
[19] Y. J. Lee, and S. Hirose, “Three-legged walking for fault tolerant locomotion of
a quadruped robot with demining mission,” in Proceedings of IEEE/RSJ Inter-
national Conference on Intelligent Robots and Systems, vol. 2, pp. 973–978, Oct.
2000.
69
[20] D. Spenneberg, K. McCullough, and F. Kirchner, “Stability of walking in a multi-
legged robot suffering leg loss,” in Proceedings of IEEE International Conference
on Robotics and Automation, vol. 3, pp. 2159–2164, Apr. 2004.
[21] P. G. Santos, J. A. Galvez, J. Estremera, and E. Garcia, “SIL04: A true walking
robot for the comparative study of walking machine techniques,” IEEE Robotics
and Automation Magazine, vol. 10, no. 4, pp. 23–32, Dec. 2003.
[22] R. Tajima and K. Suga, “Motion having a flight phase: Experiments involving
a one-legged robot,” in Proceedings of IEEE/RSJ International Conference on
Intelligent Robots and Systems, pp. 1726–1731, Oct. 2006.
[23] D. W. Haldane, J. K. Yim, and R. S. Fearing, “Repetitive extreme-acceleration
(14-g) spatial jumping with Salto-1P,” in Proceedings of IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp. 3345–3351, Sep. 2017.
[24] J. K. Yim , E. K. Wang, and R. S. Fearing, “Drift-free roll and pitch estimation
for high-acceleration hopping,” in Proceedings of IEEE International Conference
on Robotics and Automation, pp. 8986–8992, May. 2019.
[25] Reem-C Technical Specifications [Online].
Avaliable: http://pal-robotics.com/robots/reem-c
[26] O. Stasse, T. Flayols, R. Budhiraja, K. Giraud-Esclasse, J. Carpentier, J.
Mirabel, A. Del Prete, P. Soueres, N. Mansard, F. Lamiraux, and J. P. Lau-
mond, “TALOS: A new humanoid research platform targeted for industrial ap-
plications,” in Proceedings of IEEE-RAS International Conference on Humanoid
Robotics, pp. 689–695, Nov. 2017.
[27] C. Semini, V. Barasuol, M. Focchi, C. Boelens, M. Emara, S. Casella, O. Vil-
larreal, R. Orsolino, G. Fink, S. Fahmi, G. Medrano-Cerda, and D. G. Caldwell,

70
“Brief introduction to the quadruped robot hyqreal,” in Istituto di Robotica e
Macchine Intelligenti (I-RIM), 2019.
[28] G. Bledt, M. J. Powell, B. Katz, J. Di Carlo, P. M. Wensing, and S. Kim,
“MIT Cheetah 3: Design and control of a robust, dynamic quadruped robot,”
in Proceedings of IEEE/RSJ International Conference on Intelligent Robots and
Systems, pp. 2245–2252, Oct. 2018.
[29] Unitree Laikago [Online]. Avaliable: http://www.unitree.cc
[30] M. Hutter, C. Gehring, D. Jud, A. Lauber, C. D. Bellicoso, V. Tsounis, J.
Hwangbo, K. Bodie, P. Fankhauser, M. Bloesch, and R. Diethelm, “Anymal-a
highly mobile and dynamic quadrupedal robot,” in Proceedings of IEEE/RSJ
International Conference on Intelligent Robots and Systems, pp. 38–44, Oct.
2016.
[31] P. Ben-Tzvi, A. A. Goldenberg, and J. W. Zu, “Design, simulations and op-
timization of a tracked mobile robot manipulator with hybrid locomotion and
manipulation capabilities,” in Proceedings of IEEE International Conference on
Robotics and Automation, pp. 2307–2312, May. 2008.
[32] M. Simi, P. Valdastri, C. Quaglia, A. Menciassi, and P. Dario, “Design, fabrica-
tion, and testing of a capsule with hybrid locomotion for gastrointestinal tract
exploration,” IEEE/ASME Transactions on Mechatronics, vol. 15, no. 2, pp.
170–180, Feb. 2010.
[33] M. Schwarz, T. Rodehutskors, M. Schreiber, and S. Behnke, “Hybrid driving-
stepping locomotion with the wheeled-legged robot Momaro,” in Proceedings
of IEEE International Conference on Robotics and Automation, pp. 5589–5595,
May. 2016.

71
[34] N. G. Tsagarakis, G. Metta, G. Sandini, D. Vernon, R. Beira, F. Becchi, L.
Righetti, J. Santos-Victor, A. J. Ijspeert, M. C. Carrozza, and D. G. Caldwell,
“iCub: The design and realization of an open humanoid platform for cognitive
and neuroscience research,” Advanced Robotics, vol. 21, no. 10, pp. 1151–1175,
Jan. 2007.
[35] A. Kroll, W. Baetz, and D. Peretzki, “On autonomous detection of pressured air
and gas leaks using passive IR-thermography for mobile robot application,” in
Proceedings of IEEE International Conference on Robotics and Automation, pp.
921–926, May. 2009.
[36] Y. Tanaka, S. Sakama, K. Nakano, H. Kosodo, “Comparative study on dynamic
characteristics of hydraulic, pneumatic and electric motors,” in ASME/BATH
Symposium on Fluid Power and Motion Control, Oct. 2013.
[37] J. S. Chiang, C. H. Hsia, S. H. Chang, W. H. Chang, H. W. Hsu, Y. C. Tai,
C. Y. Li, and M. H. Ho, “An efficient object recognition and self-localization
system for humanoid soccer robot,” in Proceedings of SICE Annual Conference,
pp. 2269–2278, Aug. 2010.
[38] D. F. Wolf and G. S. Sukhatme, “Semantic mapping using mobile robots,” IEEE
Transactions on Robotics, vol. 24, no. 2, pp. 245–258, Apr. 2008.
[39] J. P. Cruz, M. L. Dimaala, L. G. Francisco, E. J. Franco, A. A. Bandala, and E.
P. Dadios, “Object recognition and detection by shape and color pattern recogni-
tion utilizing Artificial Neural Networks,” in Proceedings of IEEE International
Conference of Information and Communication Technology, pp. 140–144, Mar.
2013.
72
[40] J. G. Velasquez-Aguilar, M. Granados-Contreras, A. Ramirez-Agundis, and F.
Aquino-Roblero, “Hybrid object detection vision-based applied on mobile robot
navigation,” in Proceedings of IEEE International Conference on Mechatronics,
Electronics and Automotive Engineering, pp. 51–56, Nov. 2015.
[41] Embedded system & robotics [Online].
Avaliable: https://www.slideshare.net/rynraj27/embedded-system-robotics
[42] K. Berns, W. Ilg, M. Deck, J. Albiez, and R. Dillmann, “Mechanical construc-
tion and computer architecture of the four-legged walking machine BISAM,”
IEEE/ASME Transactions on Mechatronics, vol. 4, no. 1, pp. 32–38, Mar. 1999.
[43] H. Kimura, Y. Fukuoka, and H. Katabuti, “Mechanical design of a quadruped
“Tekken3&4”and navigation system using laser range sensor,” in International
Symposium on Robotics, vol. 36, no. 1, Nov. 2005.
[44] Altium: PCB Design Software and Tools [Online].
Avaliable: https://www.altium.com
[45] 10 Steps to Selecting a Microcontroller [Online]. Avaliable:
https://community.arm.com/developer/ip-products/system/b/embedded-
blog/posts/10-steps-to-selecting-a-microcontroller
[46] 2017 Embedded Markets Study [Online].
Avaliable: https://m.eet.com/media/1246048/2017-embedded-market-study.pdf
[47] Robot operating system [Online]. Avaliable: https://www.ros.org
[48] J. Caxias, F. A. Silva, J. Sequeira, “Transmission line inspection robots: Design
of the power supply system,” in Proceedings of IEEE International Conference
on Applied Robotics for the Power Industry, pp. 1–6, Oct. 2010.

73
[49] J. H. Lever, A. Streeter, and L. R. Ray, “Performance of a solar-powered robot
for polar instrument networks,” in Proceedings of IEEE International Conference
on Robotics and Automation, pp. 4252–4257, May. 2006.
[50] F. Caricchi, F. Crescimbini, F. Capponi, and L. Solero, “Study of bi-directional
buck-boost converter topologies for application in electrical vehicle motor drives,”
in APEC’98 Thirteenth Annual Applied Power Electronics Conference and Ex-
position, vol. 1, pp. 287–293, Feb. 1998.
[51] D. Peng, J. Zhang, and L. Wang, “Experimental result on wireless power manage-
ment microsystem for endoscopic capsule robot,” in Proceedings of IEEE-EMBS
International Conference on Biomedical and Health Informatics, pp. 810–813,
Jan. 2012.
[52] STM32F405xx/407xx data sheet - production data [Online].
Avaliable: https://www.st.com/resource/en/datasheet/stm32f405rg.pdf
[53] V. D. Blank, V. S. Bormashov, S. A. Tarelkin, S. G. Buga, M. S. Kuznetsov, D. V.
Teteruk, N. V. Kornilov, S. A. Terentiev, and A. P. Volkov, “Power high-voltage
and fast response Schottky barrier diamond diodes,” Diamond and Related Ma-
terials, vol. 57, pp. 32–36, Aug. 2015.
[54] S. Muralikrishna and S. Sathyamurthy, “An overview of digital circuit design
and PCB design guidelines - An EMC perspective,” in Proceedings of IEEE
International Conference on Electromagnetic Interference & Compatibility, pp.
567–573, Nov. 2008.
[55] M. R. Islam and T. A. Rahman, “Novel and simple design of multi layer radial
line slot array (RLSA) antenna using FR-4 substrate,” in Proceedings of IEEE
74
International Conference on Electromagnetic Compatibility, pp. 843–846, May.
2008.
[56] M. Shinagawa, J. Katsuyama, K. Matsumoto, S. Hasegawa, R. Sugiyama, and
Y. Kado, “Noise analysis for intra-body communication based on parasitic ca-
pacitance measurement,” Measurement, vol. 51, pp. 206–213, May. 2014.
[57] Potentiometer taper [Online].
Avaliable: http://www.resistorguide.com/potentiometer-taper
[58] Independent linearity tolerance [Online].
Avaliable: http://sakae-tsushin.co.jp/eng page/pdf/pot/e 22HP.pdf
[59] S. Golestan, M. Ramezani, J. M. Guerrero, F. D. Freijedo, and M. Monfared,
“Moving average filter based phase-locked loops: Performance analysis and de-
sign guidelines,” IEEE Transactions on Power Electronics, vol. 29, no. 6, pp.
2750–2763, Jul. 2013.
[60] D. Zanotto, P. Stegall, S. K. Agrawal, “ALEX III: A novel robotic platform
with 12 DOFs for human gait training,” in Proceedings of IEEE International
Conference on Robotics and Automation, pp. 3914–3919, May. 2013.
[61] H. Kimura, Y. Fukuoka, and A. H. Cohen, “Adaptive dynamic walking of a
quadruped robot on natural ground based on biological concepts,” The Interna-
tional Journal of Robotics Research, vol. 26, no. 5, pp. 475–490, May. 2007.
[62] J. Malmborg, “Analysis and Design of Hybrid Control Systems,” Department of
Automatic Control Lund Institute of Technology, Sweden, May. 1998.
![Group #2 / Embedded Motion Control [5HC99] Embedded Visual Control 1 Group #5 / Embedded Visual Control Self-Balancing Robot Navigation Paul Padila Vivian](https://img.pdfslide.us/doc/110x75/56649e685503460f94b6469a/group-2-embedded-motion-control-5hc99-embedded-visual-control-1-group.jpg)