Embed Size (px)
Citation preview

EM-1240-LX User’s Manual
Fifth Edition, February 2009
www.moxa.com/product
© 2009 Moxa Inc. All rights reserved. Reproduction without permision is prohibited.

EM-1240-LX User’s Manual The software described in this manual is furnished under a license agreement and may be used only in
accordance with the terms of that agreement.
Copyright Notice
Copyright © 2009 Moxa Inc. All rights reserved.
Reproduction without permission is prohibited.
Trademarks
MOXA is a registered trademark of Moxa Inc. All other trademarks or registered marks in this manual belong to their respective manufacturers.
Disclaimer
Information in this document is subject to change without notice and does not represent a commitment on the part of Moxa.
Moxa provides this document “as is,” without warranty of any kind, either expressed or implied, including, but not limited to, its particular purpose. Moxa reserves the right to make improvements and/or changes to this manual, or to the products and/or the programs described in this manual, at any time.
Information provided in this manual is intended to be accurate and reliable. However, Moxa assumes no responsibility for its use, or for any infringements on the rights of third parties that may result from its use.
This product might include unintentional technical or typographical errors. Changes are periodically made to the information herein to correct such errors, and these changes are incorporated into new editions of the publication.
Technical Support Contact Information www.moxa.com/support
Moxa Americas: Toll-free: 1-888-669-2872 Tel: +1-714-528-6777 Fax: +1-714-528-6778
Moxa China (Shanghai office): Toll-free: 800-820-5036 Tel: +86-21-5258-9955 Fax: +86-10-6872-3958
Moxa Europe: Tel: +49-89-3 70 03 99-0 Fax: +49-89-3 70 03 99-99
Moxa Asia-Pacific: Tel: +886-2-8919-1230 Fax: +886-2-8919-1231

Table of Contents Chapter 1 Introduction ..................................................................................................1-1
Overview.................................................................................................................................. 1-2 Package Checklist .................................................................................................................... 1-2 Product Features ...................................................................................................................... 1-2 Product Specifications ............................................................................................................. 1-3
Hardware Specifications............................................................................................... 1-3 Software Specifications ................................................................................................ 1-4
Hardware Block Diagram ........................................................................................................ 1-5 Appearance .............................................................................................................................. 1-5 Dimensions .............................................................................................................................. 1-7 Installing the EM-1240-LX...................................................................................................... 1-7 LED Indicators......................................................................................................................... 1-8 Wiring Requirements ............................................................................................................... 1-8
Connecting the Power................................................................................................... 1-9 Grounding the EM-1240-LX ........................................................................................ 1-9
Connecting Data Transmission Cables .................................................................................... 1-9 Connecting to the Network........................................................................................... 1-9 Connecting to a Serial Device .................................................................................... 1-10 Serial Console Port ..................................................................................................... 1-10
Internal SD Socket ..................................................................................................................1-11 Additional Functions...............................................................................................................1-11
Reset Button ............................................................................................................... 1-11 Real-time Clock.......................................................................................................... 1-12
Chapter 2 Getting Started .............................................................................................2-1 Powering on the EM-1240-LX ................................................................................................ 2-2 Connecting the EM-1240-LX to a PC...................................................................................... 2-2
Console Port ................................................................................................................. 2-2 Telnet............................................................................................................................ 2-3
Configuring the Ethernet Interface .......................................................................................... 2-4 Installing a Secure Digital (SD) Memory Card........................................................................ 2-6 Developing Your Applications ................................................................................................. 2-6
Installing the EM-1240-LX Tool Chain ....................................................................... 2-7 Compiling Hello.c ........................................................................................................ 2-7 Uploading “Hello” to the EM-1240-LX ....................................................................... 2-8 Running “Hello” on the EM-1240-LX ......................................................................... 2-9 Make File Example Code ........................................................................................... 2-10
Chapter 3 Software Package ........................................................................................3-1 EM-1240-LX Software Architecture ....................................................................................... 3-2
Journaling Flash File System (JFFS2) .......................................................................... 3-3 EM-1240-LX Software Package.............................................................................................. 3-4
Chapter 4 Configuring the EM-1240-LX .......................................................................4-1 Enabling and Disabling Daemons............................................................................................ 4-2 Adding a Web Page.................................................................................................................. 4-3 IPTABLES ............................................................................................................................... 4-3 NAT.......................................................................................................................................... 4-7
NAT Example............................................................................................................... 4-7

Enabling NAT at Bootup .............................................................................................. 4-7 Configuring Dial-in/Dial-out Service ...................................................................................... 4-8
Dial-out Service............................................................................................................ 4-8 Dial-in Service.............................................................................................................. 4-8
Configuring PPPoE.................................................................................................................. 4-8 How to Mount a Remote NFS Server ...................................................................................... 4-9 Dynamic Driver Module Load/Unload .................................................................................... 4-9 Upgrading the Kernel............................................................................................................. 4-10 Upgrading the Root File System & User Directory ................................................................4-11 Loading Factory Defaults ...................................................................................................... 4-12 Autostarting User Applications on Bootup ............................................................................ 4-12 Checking the Kernel and Root File System Versions............................................................. 4-12
Chapter 5 EM-1240-LX Device API ...............................................................................5-1 RTC (Real-time Clock) ............................................................................................................ 5-2 Buzzer ...................................................................................................................................... 5-2 UART Interface........................................................................................................................ 5-2 GPIO........................................................................................................................................ 5-3
Appendix A System Commands..................................................................................... A-1 µClinux normal command utility collection ........................................................................... A-1
File manager ................................................................................................................ A-1 Editor ........................................................................................................................... A-1 Network ....................................................................................................................... A-2 Process......................................................................................................................... A-2 Other ............................................................................................................................ A-2 Moxa Special Utilities ................................................................................................. A-2
Appendix B SNMP Agent with MIB II & RS-232 Like Group ......................................... B-1
Appendix C EM-1240-LX FAQ ......................................................................................... C-1

11 Chapter 1 Introduction
The Moxa EM-1240-LX Series of Mini RISC-based Ready-to-Run Embedded Computer features dual 10/100 Mbps Ethernet ports and four RS-232/422/485 serial ports in a built-in µClinux ARM9 module. In addition, the EM-1240-LX supports an SD memory card for storage expansion, offers high performance communication and unlimited storage in a super compact, palm-sized module. The EM-1240-LX is an ideal solution for embedded applications that use a lot of memory and must be housed in a small physical space without sacrificing performance.
In this chapter we cover the following topics:
Overview Package Checklist Product Features Product Specifications
Hardware Specifications Software Specifications
Hardware Block Diagram Appearance Dimensions Installing the EM-1240-LX LED Indicators Wiring Requirements
Connecting the Power Grounding the EM-1240-LX
Connecting Data Transmission Cables Connecting to the Network Connecting to a Serial Device Serial Console Port
Internal SD Socket Additional Functions
Reset Button Real-time Clock

EM-1240-LX User’s Manual Introduction
Overview The EM-1240-LX Series of mini RISC-based communication platforms are ideal for your embedded applications. The EM-1240-LX comes with 4 RS-232/422/485 serial ports and dual 10/100 Mbps Ethernet LAN ports to provide users with a versatile communication platform.
The EM-1240-LX uses the Moxa ART ARM9 RISC CPU. Unlike the X86 CPU, which uses a CISC design, the ARM9’s RISC design architecture and modern semiconductor technology provide the EM-1240-LX with a powerful computing engine and communication functions, but without generating too much heat. The built-in 8 MB NOR Flash ROM and 16 MB SDRAM give you enough storage capacity and an additional SD socket provides you with flexible storage expansion to run applications. The dual LAN ports built into the ARM9 make the EM-1240-LX an ideal communication platform for simple data acquisition and protocol conversion applications, and the two RS-232/422/485 serial ports allow you to connect a variety of serial devices.
The pre-installed µClinux operating system provides an open software operating system for software program development. Software written for desktop PCs is easily ported to the EM-1240-LX with a GNU cross compiler, so that you will not need to spend time modifying existing software code. The operating system, device drivers, and your own software can all be stored in the EM-1240-LX’s Flash memory.
Package Checklist EM-1240-LX
Mini RISC-based ready-to-run embedded computer with 4 serial ports, dual Ethernet, SD, μClinux OS
EM-1240-LX Series products are shipped with the following items:
1 EM-1240-LX embedded module 1 EM-1240-LX Development Kit (optional) Quick Installation Guide Document & Software CD Cross-over Ethernet cable CBL-RJ45M9-150: 150 cm, 8-pin RJ45 to male DB9 serial port cable CBL-RJ45F9-150: 150 cm, 8-pin RJ45 to female DB9 console port cable Power cord Product Warranty Statement
NOTE: Notify your sales representative if any of the above items are missing or damaged.
Product Features EM-1240-LX Series products have the following features:
MOXA ART ARM9 32-bit 192 MHz communication processor On-board 16 MB RAM, 8 MB Flash ROM 4 software-selectable RS-232/422/485 serial ports 2 10/100 Mbps Ethernet ports RS-232 console, with full signal and PPP support Ready-to-run μCLinux Kernel 2.6.9 communication platform SD signal supported
1-2
EM-1240-LX User’s Manual Introduction
Product Specifications Hardware Specifications
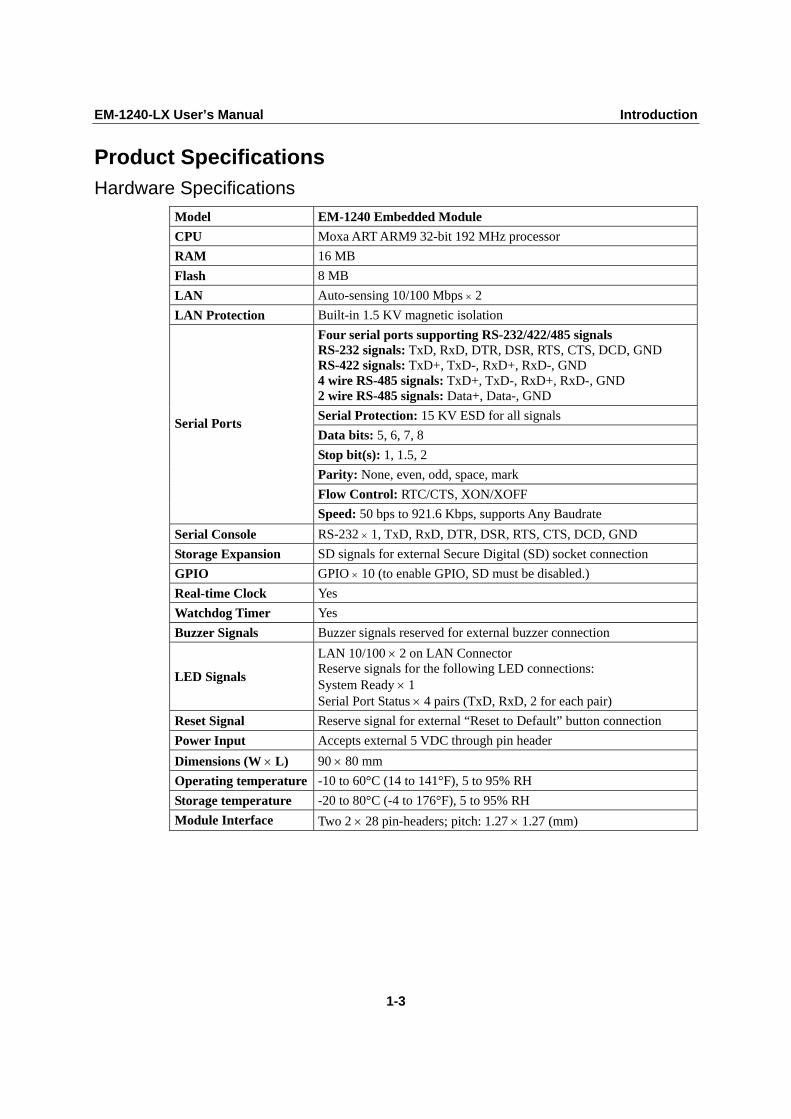
Model EM-1240 Embedded Module CPU Moxa ART ARM9 32-bit 192 MHz processor RAM 16 MB Flash 8 MB LAN Auto-sensing 10/100 Mbps × 2 LAN Protection Built-in 1.5 KV magnetic isolation
Four serial ports supporting RS-232/422/485 signals RS-232 signals: TxD, RxD, DTR, DSR, RTS, CTS, DCD, GND RS-422 signals: TxD+, TxD-, RxD+, RxD-, GND 4 wire RS-485 signals: TxD+, TxD-, RxD+, RxD-, GND 2 wire RS-485 signals: Data+, Data-, GND Serial Protection: 15 KV ESD for all signals Data bits: 5, 6, 7, 8 Stop bit(s): 1, 1.5, 2 Parity: None, even, odd, space, mark Flow Control: RTC/CTS, XON/XOFF
Serial Ports
Speed: 50 bps to 921.6 Kbps, supports Any Baudrate Serial Console RS-232 × 1, TxD, RxD, DTR, DSR, RTS, CTS, DCD, GND Storage Expansion SD signals for external Secure Digital (SD) socket connection GPIO GPIO × 10 (to enable GPIO, SD must be disabled.) Real-time Clock Yes Watchdog Timer Yes Buzzer Signals Buzzer signals reserved for external buzzer connection
LED Signals
LAN 10/100 × 2 on LAN Connector Reserve signals for the following LED connections: System Ready × 1 Serial Port Status × 4 pairs (TxD, RxD, 2 for each pair)
Reset Signal Reserve signal for external “Reset to Default” button connection Power Input Accepts external 5 VDC through pin header Dimensions (W × L) 90 × 80 mm Operating temperature -10 to 60°C (14 to 141°F), 5 to 95% RH Storage temperature -20 to 80°C (-4 to 176°F), 5 to 95% RH Module Interface Two 2 × 28 pin-headers; pitch: 1.27 × 1.27 (mm)
1-3

EM-1240-LX User’s Manual Introduction
Software Specifications Kernel µClinux Kernel 2.6.9
Supports dynamic driver module load / unload Protocol Stack ARP, ICMP, IPV4, TCP, UDP, FTP, Telnet, SNMP V1/V2c, HTTP,
CHAP, PAP, DHCP, NTP, NFS V2/V3, SMTP, Telnet, FTP, PPP, PPPoE
File System JFFS2 for Kernel, Root File System (Read Only) and User Directory (Read / Write)
Msh Minix shell command pppd Dial in/out over serial port daemon PPPoE Point-to-Point over Ethernet daemon snmpd SNMP V1/V2c Agent daemon busybox Linux normal command utility Tinylogin login and user manager utility Telnetd Telnet server daemon telnet Telnet client program inetd TCP server manager program ftpd FTP server program ftp FTP client program boa Web server daemon ntpdate Network Time Protocol client utility
Tool Chain Linux Tool Chain Arm-elf-gcc (V2.95.3): C/C++ PC Cross Compiler
uClibc (V0.9.26): POSIX standard C library
1-4
EM-1240-LX User’s Manual Introduction
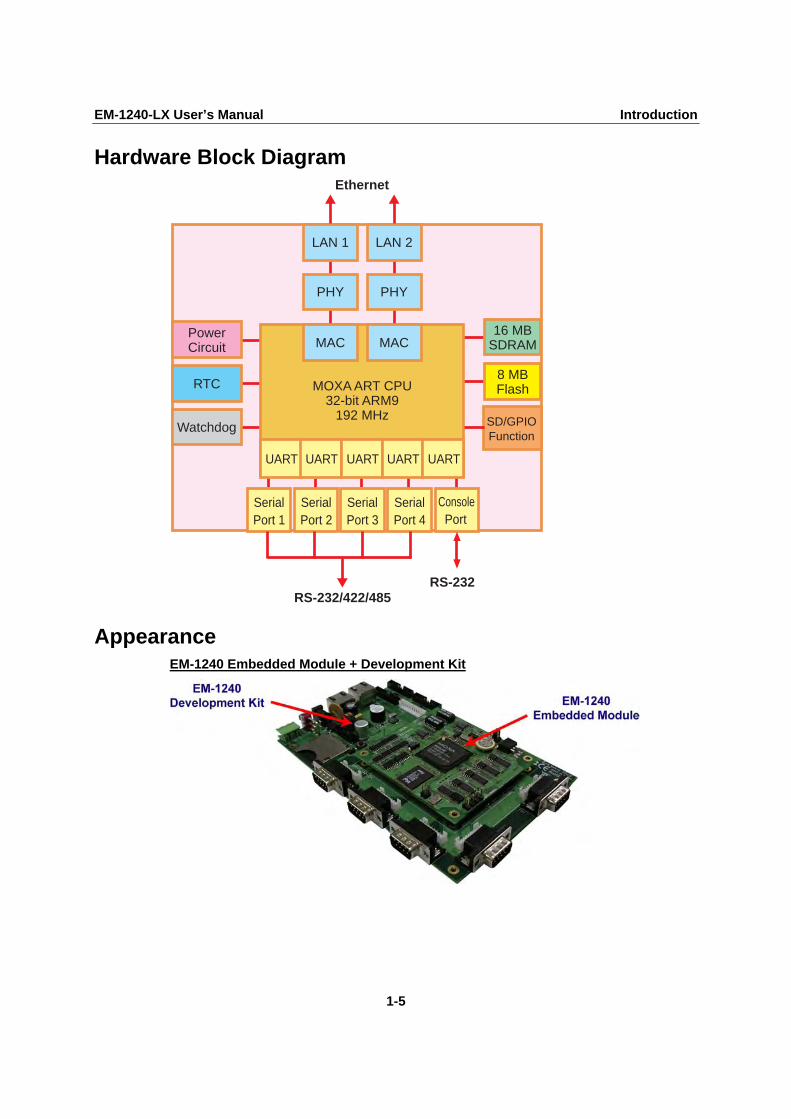
Hardware Block Diagram
RS-232
16 MBSDRAM
MOXA ART CPU32-bit ARM9
192 MHz
LAN 1
PHY
MAC
LAN 2
PHY
MACPowerCircuit
Watchdog
8 MBFlashRTC
SerialPort 2
SerialPort 1
SerialPort 4
SerialPort 3
ConsolePort
UART
RS-232/422/485
UART UART UART UART
SD/GPIOFunction
Ethernet
Appearance EM-1240 Embedded Module + Development Kit
1-5

EM-1240-LX User’s Manual Introduction
EM-1240 Embedded Module
EM-1240 Development Kit
1-6

EM-1240-LX User’s Manual Introduction
Dimensions EM-1240 Embedded Module
EM-1240 Development Kit
Installing the EM-1240-LX If you would like to use the EM-1240 Embedded Module and the EM-1240 Development Kit, insert the EM-1240 Embedded Module vertically onto the Development Kit. Note that the pin marked “JP4” on the Embedded Module must be matched with the pin marked “JP6” on the Development Kit; and the Pin marked “JP3” on the Embedded Module must be matched with the Pin marked “JP4” on the Development Kit. Be careful when inserting the module to avoid damaging the product.
1-7

EM-1240-LX User’s Manual Introduction
LED Indicators The following table explains the function of the five LED indicators located on the EM-1240-LX’s top panel.
LED Name LED Color LED Function Ready Green Power is on and functioning normally.
Green Serial port 1 or 2 is transmitting data. P1/P2 (Tx)
Off Serial port 1 or 2 is not transmitting data. Yellow Serial port 1 or 2 is receiving data.
P1/P2 (Rx) Off Serial port 1 or 2 is not receiving data.
Wiring Requirements This section describes how to connect the EM-1240-LX to serial devices.
You should pay attention to the following common safety precautions before proceeding with the installation of any electronic device:
Use separate paths to route wiring for power and devices. If power wiring and device wiring paths must cross, make sure the wires are perpendicular at the intersection point. NOTE: Do not run signal or communication wiring and power wiring in the same wire conduit. To avoid interference, wires with different signal characteristics should be routed separately.
Use the type of signal transmitted through a wire to determine which wires should be kept separate. The rule of thumb is that wiring that shares similar electrical characteristics can be bundled together.
Keep input wiring and output wiring separate.
It is advisable to label the wiring to all devices in the system.
ATTENTION
Safety First! Be sure to disconnect the power cord before installing and/or wiring your EM-1240-LX. Wiring Caution! Calculate the maximum possible current in each power wire and common wire. Observe all electrical codes dictating the maximum current allowable for each wire size. If the current goes above the maximum ratings, the wiring could overheat, causing serious damage to your equipment. Temperature Caution! Be careful when handling the EM-1240-LX. When plugged in, the EM-1240-LX’s internal components generate heat, and consequently the outer casing may feel hot to the touch.
1-8

EM-1240-LX User’s Manual Introduction
Connecting the Power Connect the “live-wire” end of the 12-48 VDC power adaptor to the EM-1240-LX’s terminal block. If the power is properly supplied, the “Ready” LED will glow a solid green after a 25 to 30 second delay.
Grounding the EM-1240-LX Grounding and wire routing help limit the effects of noise due to electromagnetic interference (EMI). Run the ground wire from the ground screw to the grounding surface prior to connecting devices.
ATTENTION
This product should be mounted to a well-grounded mounting surface such as a metal panel.
V+V-
SG
12-48V
SG: The Shielded Ground (sometimes called Protected Ground) contact is the left most contact of the 3-pin power terminal block connector when viewed from the angle shown here. Connect the SG wire to an appropriate grounded metal surface.
Connecting Data Transmission Cables This section describes how to connect the EM-1240-LX to the network, serial devices, and serial COM terminal.
Connecting to the Network Connect one end of the Ethernet cable to the EM-1240-LX’s 10/100M Ethernet port and the other end of the cable to the Ethernet network. If the cable is properly connected, the EM-1240-LX will indicate a valid connection to the Ethernet in the following ways:
The top-right LED on the connector glows a solid green when connected to a 100 Mbps Ethernet network.
The top-left LED on the connector glows a solid orange when connected to a 10 Mbps Ethernet network.
The LEDs will flash when Ethernet packets are being transmitted or received.
1-9

EM-1240-LX User’s Manual Introduction
The 10/100 Mbps Ethernet LAN 1 and LAN 2 ports use 8-pin RJ45 connectors. Pinouts for these ports are given in the following diagram.
8-pin RJ45
1 8
100 Mbps indicator
10 Mbpsindicator
Pin Signal1 ETx+ 2 ETx- 3 ERx+ 4 --- 5 --- 6 ERx- 7 --- 8 ---
Connecting to a Serial Device Connect the serial cable between the EM-1240-LX and the serial device(s).
Serial ports P1 and P2 use male DB9 connectors, and can be configured for RS-232/422/485 by software. The pin assignments are shown in the following table:
DB9 Male Port RS-232/422/485 Pinouts 1 2 3 4 5
6 7 8 9
Pin RS-232 RS-422 RS-485 (4-wire)
RS-485 (2-wire)
1 DCD TxDA(-) TxDA(-) --- 2 RxD TxDB(+) TxDB(+) --- 3 TxD RxDB(+) RxDB(+) DataB(+) 4 DTR RxDA(-) RxDA(-) DataA(-) 5 GND GND GND GND 6 DSR --- --- --- 7 RTS --- --- --- 8 CTS --- --- ---
Serial Console Port The serial console port is a 4-pin pin-header RS-232 port. It is designed for serial console terminals, which are useful for identifying the EM-1240-LX boot up message.
Serial Console Port & Pinouts Serial Console Cable
4
3
2
1
Pin Signal 1 TxD 2 RxD 3 NC 4 GND
1-10

EM-1240-LX User’s Manual Introduction
Internal SD Socket The EM-1240-LX provides an internal SD socket for storage expansion. It allows users to plug in a Secure Digital (SD) memory card compliant with the SD 1.0 standard for up to 1 GB of additional memory space. To install an additional SD card, you must first remove the EM-1240-LX’s outer cover to access the slot. The internal SD socket is located on the backside of the EM-1240-LX’s bottom board; you can find the SD plug-in slot at the right of the EM-1240-LX, lower than the cover screw. Plug the SD card into the socket directly and remember to press the SD card first if you want to take it out. Please note that the SD function shares the same chipset with the DIO. If you would like to enable the SD function, the DIO must be disabled. If you would like to enable the DIO, the SD function must be disabled.
Additional Functions
Reset Button Press the Reset button on the EM-1240-DK continuously for at least 5 seconds to load the factory default configuration. After the factory default configuration has been loaded, the system will reboot automatically. We recommend that you only use this function if the software is not working properly and you want to load factory default settings. To reset an embedded Linux system, always use the software reboot command />reboot to protect the integrity of data being transmitted or processed. The Reset button is not designed to hard reboot the EM-1240 Development Kit.
ATTENTION
Resetting to factory defaults will not format the user directory and erase all of the user’s data. Loading factory defaults will only load the configuration file. The files in the EM-1240-LX that will be replaced include: a. /etc/boa.conf b. /etc/hosts c. /etc/inittab d. /etc/password e. /etc/ramfs.img f. /etc/resolv.conf g. /etc/version h. /etc/group i. /etc/inetd.conf j. /etc/motd k. /etc/protocols l. /etc/rc m. /etc/services n. /home/httpd/index.html
ATTENTION
This function only takes effect when the user directory is working correctly. If the user directory has crashed, the kernel will automatically load the factory defaults.
1-11
EM-1240-LX User’s Manual Introduction
Real-time Clock The EM-1240-LX’s real time clock is powered by a lithium battery. We strongly recommend that you do not replace the lithium battery without the help of Moxa’s support team. If the battery needs to be changed, contact the Moxa RMA service team for RMA service.
ATTENTION
The battery may explode if replaced by an incorrect type. To avoid this potential danger, always be sure to use the correct type of battery.
1-12

22 Chapter 2 Getting Started
In this chapter, we explain the basic procedure for getting the EM-1240-LX connected and ready for your needs.
In this chapter we cover the following topics:
Powering on the EM-1240-LX Connecting the EM-1240-LX to a PC
Console Port Telnet
Configuring the Ethernet Interface Installing a Secure Digital (SD) Memory Card Developing Your Applications
Installing the EM-1240-LX Tool Chain Compiling Hello.c Uploading “Hello” to the EM-1240-LX Running “Hello” on the EM-1240-LX Make File Example Code

EM-1240-LX User’s Manual Getting Started
Powering on the EM-1240-LX Connect the SG wire to the Shielded Contact located on the upper left corner of the EM-1240-LX, and then power on the EM-1240-LX by connecting the power adaptor. It takes about 16 seconds for the system to boot up. Once the system is ready, the Ready LED will light up.
ATTENTION
After connecting the EM-1240-LX to the power supply, it will take about 16 seconds for the operating system to boot up. The green Ready LED will not turn on until the operating system is ready.
Connecting the EM-1240-LX to a PC There are two ways to connect the EM-1240-LX to a PC.
Console Port The serial console port offers users a convenient means of connecting to the EM-1240-LX. This method is particularly useful when using the EM-1240-LX for the first time. Since the communication is over a direct serial connection, you do not need to know either of the IP addresses in order to make contact.
Use the serial console port settings shown on the right. Once the connection is established, the following window will open.
Serial Console Port Settings
Baudrate 19200 bps
Parity None
Data bits 8
Stop bits 1
Flow Control None
Terminal VT100
2-2

EM-1240-LX User’s Manual Getting Started
Telnet If you know at least one of the two IP addresses and netmasks, then you can use Telnet to connect to the EM-1240-LX’s console.
Default IP Address Default Netmask
LAN 1 192.168.3.127 255.255.255.0
LAN 2 192.168.4.127 255.255.255.0
Telnet can be used locally by using a crossover Ethernet cable to connect your computer to the EM-1240-LX, or over a LAN or the Internet. The default IP addresses and netmasks are shown above. To login, type the Login name and password as requested. The defaults are:
Login: root Password: root
Once you open the “msh command shell” you can proceed to configure the EM-1240-LX’s network settings, as described in the next section.
ATTENTION
Serial Console Reminder: Remember to choose VT100 as the terminal type. Use the CBL-RJ45F9-150 cable that comes with the EM-1240-LX to connect to the serial console port. If you are not able to conect on the first try, unplug and then re-plug the EM-1240-LX’s power cord.
Telnet Reminder: When connecting to the EM-1240-LX over a LAN, you must configure your PC’s Ethernet card to be on the same subnet as the EM-1240-LX you wish to contact.
2-3

EM-1240-LX User’s Manual Getting Started
Configuring the Ethernet Interface In this section, we use the serial console to explain how to modify the EM-1240-LX’s network settings.
1. Change directories by issuing the command cd /etc.
2. Type the command vi rc to use the VI Editor to edit the configuration file. The IP addresses for the EM-1240-LX’s LAN1 and LAN2 are given as
ifconfig eth0 192.168.3.127 ifconfig eth1 192.168.4.127
as shown in the following figure. Edit these two lines to modify the static IP addresses.
2-4

EM-1240-LX User’s Manual Getting Started
3. You may also configure the EM-1240-LX to request IP addresses from a DHCP server. In this case, use the sharp sign (#) to comment out one or both “ifconfig” lines, and then add the setting about the “dhcpcd” into the rc file as below.
dhcpcd -p -a eth0 & dhcpcd -p -a eth1 &
Note that the EM-1240-LX will send out DHCP broadcast packets, and then get the IP addresses from the first DHCP server that responds.
4. Issue the vi “write” command to save the file, and then reboot. Since the EM-1240-LX only reads the “rc” file when booting up, you must reboot (e.g., by issuing the vi reboot command) for the changes to take affect.
ATTENTION
You may reset the IP address immediately by issuing the command
ifconfig eth0 192.168.5.127
(This will change the IP address of LAN1.) Issuing this command will NOT however update the “rc” file in the EM-1240-LX’s flash memory, so the next time you reboot, the IP address will revert to its previous value.
2-5

EM-1240-LX User’s Manual Getting Started
Installing a Secure Digital (SD) Memory Card The EM-1240-LX provides an internal SD socket for storage expansion. To access this socket, perform the following steps to install the SD memory card.
Step 1: Find the exact location of the SD socket. Step 2: Insert the SD card into the socket. Make sure the card is situated correctly. Step 3: Push the SD card inward.
Step 4: Before using the SD card, check the /etc/rc file to ensure that the driver module for the SD card control is loaded. The loading sequence should be as follows:
insmod /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/mmc_core.ko insmod /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/mmc_block.ko insmod /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/moxasd.ko
Step 5: To take out the SD memory card, press the SD card again. The card will pop out part of the way, after which you can pull it out directly.
Developing Your Applications Step 1:
Connect the EM-1240-LX to a Linux PC. Step 2:
Install Tool Chain (GNU Cross Compiler & uClibc). Step 3:
Configure cross compiler and uClibc environment variables.
Step 4: Code & compile your program.
Step 5: Download program to the EM-1240-LX via FTP or NFS.
Step 6: Debug the program. If the program is OK, proceed to Step 7. If the program needs to be modified, go back to Step 4.
Step 7: Back up the user directory, and distribute the code to additional EM-1240-LX units.
68x
CrossCompiler
2-6

EM-1240-LX User’s Manual Getting Started
Installing the EM-1240-LX Tool Chain Linux
The PC must have the Linux Operating System pre-installed to install the EM-1240-LX Linux GNU Tool Chain. Debian 3.0R-Woody, Redhat 7.3/8.0 and compatible versions are recommended. The Tool Chain requires about 100 MB of hard disk space (on your PC). The EM-1240-LX Tool Chain can be found on the EM-1240-LX Document & Software CD. To install the Tool Chain, insert the CD into your PC and then issue the following command:
#mount –t iso9660 /dev/cdrom /mnt/cdrom
Next, run the following script from the root to install the compilers, linkers, and libraries in the /usr/local directory:
#sh /mnt/cdrom/tool-chain/linux/installer/arm-elf-moxa-toolchain-1.1.sh
The Tool Chain installation will take a few minutes to complete.
ATTENTION
The Tool Chain can be downloaded from Moxa’s website. To do this, navigate to the EM-1240-LX product page, click the Documentation & Drivers link, and then click Go under Driver & Software Downloads.
Compiling Hello.c The Tool Chain path is:
PATH=/usr/local/bin:$PATH
The EM-1240-LX CD includes several example programs. We use Hello.c to illustrate how to compile and run applications.
Issue the following commands from your PC to compile Hello.c:
# cd /tmp/ # mkdir example # cp –r /mnt/cdrom/example/* /tmp/example
Go to the Hello subdirectory, and then issue the command #make to compile Hello.c. Finally, execute the program to generate hello and hello.gdb.
2-7

EM-1240-LX User’s Manual Getting Started
Uploading “Hello” to the EM-1240-LX To use FTP to upload hello to the EM-1240-LX, issue the following commands on the PC:
#ftp 192.168.3.127 ftp> cd /home ftp> bin ftp> put ./hello ftp> quit #telnet 192.168.3.127
2-8

EM-1240-LX User’s Manual Getting Started
Running “Hello” on the EM-1240-LX To run the Hello program issue the following commands on the EM-1240-LX:
# chmod 755 hello #./hello The words “hello world” are printed on the screen.
ATTENTION
Be sure to calculate the amount of Flash Memory used by the User File System in the Flash ROM. Use one of the following two commands to determine the amount of memory in use:
# df –k or # df
If the flash memory is full, you will no longer be able to save data to the Flash ROM. To free up some memory, use the console cable to connect to the EM-1240-LX’s serial console terminal, and then delete files from the Flash ROM.
2-9

EM-1240-LX User’s Manual Getting Started
2-10
Make File Example Code The following Make File example codes are copied from the Hello example on the EM-1240-LX’s CD-ROM.
srcdir = . LDFLAGS = -Wl,-elf2flt LIBS = CFLAGS = # Change these if necessary CC = arm-elf-gcc CPP = arm-elf-gcc -E all: hello hello: $(CC) -o $@ $(CFLAGS) $(LDFLAGS) $(LIBS) [email protected] clean: rm -f $(OBJS) hello core *.gdb

33 Chapter 3 Software Package
This chapter includes information about the software that is used with EM-1240-LX Series products.
In this chapter, we cover the following topics:
EM-1240-LX Software Architecture Journaling Flash File System (JFFS2)
EM-1240-LX Software Package
EM-1240-LX User’s Manual Software Package
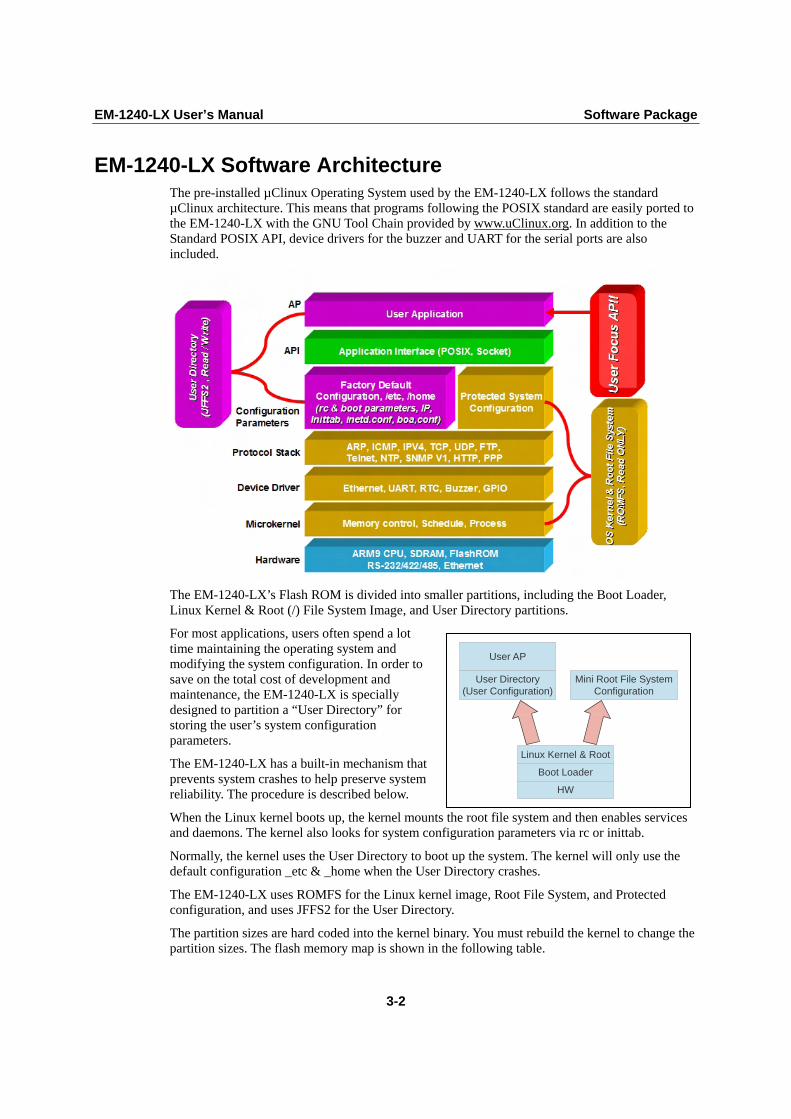
EM-1240-LX Software Architecture The pre-installed µClinux Operating System used by the EM-1240-LX follows the standard µClinux architecture. This means that programs following the POSIX standard are easily ported to the EM-1240-LX with the GNU Tool Chain provided by www.uClinux.org. In addition to the Standard POSIX API, device drivers for the buzzer and UART for the serial ports are also included.
The EM-1240-LX’s Flash ROM is divided into smaller partitions, including the Boot Loader, Linux Kernel & Root (/) File System Image, and User Directory partitions.
For most applications, users often spend a lot time maintaining the operating system and modifying the system configuration. In order to save on the total cost of development and maintenance, the EM-1240-LX is specially designed to partition a “User Directory” for storing the user’s system configuration parameters.
The EM-1240-LX has a built-in mechanism that prevents system crashes to help preserve system reliability. The procedure is described below.
When the Linux kernel boots up, the kernel mounts the root file system and then enables services and daemons. The kernel also looks for system configuration parameters via rc or inittab.
User AP
User Directory(User Configuration)
Mini Root File SystemConfiguration
Linux Kernel & Root
HW
Boot Loader
Normally, the kernel uses the User Directory to boot up the system. The kernel will only use the default configuration _etc & _home when the User Directory crashes.
The EM-1240-LX uses ROMFS for the Linux kernel image, Root File System, and Protected configuration, and uses JFFS2 for the User Directory.
The partition sizes are hard coded into the kernel binary. You must rebuild the kernel to change the partition sizes. The flash memory map is shown in the following table.
3-2

EM-1240-LX User’s Manual Software Package
Flash Context Flash Address Size Access control
Boot loader 0 – 0x3ffff 256 K Read ONLY
Kernet & Root File System
0x40000– 0x3fffff 4 M Read ONLY JFFS2
User Directory 0x400000 – 0x7fffff 4 M – 256 K Read / Write JFFS2
Developers should store their own programs only to partitions /etc, /home, /tmp, and /usr/bin. In addition, executable files should be stored in /usr/bin, as doing so will allow developers to use hotkeys.
In addition to the flash file systems, a RAM based file system is mounted on /var/.
Journaling Flash File System (JFFS2) The flash User Directory is formatted by the Journaling Flash File System (JFFS2), which places a compressed file system on the flash, transparent to the user.
Axis Communications in Sweden developed the Journaling Flash File System (JFFS2).
JFFS2 provides a file system directly on flash, rather than emulating a block device designed for use on flash-ROM chips. It recognizes flash-ROM chips’ special write requirements, does wear-leveling to extend flash life, keeps the flash directory structure in RAM at all times, and implements a log-structured file system that is always consistent—even if the system crashes or unexpectedly powers down. It does not require fsck on boot up.
JFFS2, a later version of JFFS, provides improved wear-leveling and garbage-collection performance, improved RAM footprint and response to system-memory pressure, improved concurrency and support for suspending flash erases, marking of bad sectors with continued use of the remaining good sectors (thus enhancing the write-life of the devices), native data compression inside the file system design; and support for hard links.
Key features of JFFS2 are:
Directly targeted to Flash ROM Robust Consistent across power failure No integrity scan (fsck) is required at boot time after normal or abnormal shutdown Explicit wear leveling Transparent compression
Although JFFS2 is a journaling file system, this does not preclude the loss of data. The file system will remain in a consistent state across power failures, and will always be mountable. However, if the board is powered down during a write, then the incomplete write will be rolled back on the next boot. Any writes that were already completed will not be affected.
Additional information about JFFS2 is available at http://sources.redhat.com/jffs2/jffs2.pdf http://developer.axis.com/software/jffs/ http://www.linux-mtd.infradead.org/
3-3

EM-1240-LX User’s Manual Software Package
3-4
EM-1240-LX Software Package bin dev upkernel passwd -> tinylogin login -> tinylogin tinylogin telnetd snmpd mail sh routed netstat arp chat pppd portmap ntpdate necid eraseall kversion init expand inetd hwclock ftpd ftp mke2fs e2fsck discard dhcpcd cpu busybox boa downramdisk upramdisk
mtdblock1 mtdr1 mtd1 mtdblock0 mtdr0 mtd0 cum1 cum0 ttyM1 ttyM0 urandom random zero ttypf ttype ttypd ttypc ttypb ttypa ttyp9 ttyp8 ttyp7 ttyp6 ttyp5 ttyp4 ttyp3 ttyp2 ttyp1 ttyp0 ttyS0 tty3 tty2 tty1 tty0 rom1 rom0 ptypf ptype ptypd ptypc ptypb ptypa ptyp9 ptyp8 ptyp7 ptyp6 ptyp5 ptyp4 ptyp3 ptyp2 ptyp1

EM-1240-LX User’s Manual Software Package
bin dev ptyp0 ppp pio rtc ram1 ram0 null kmem mem cua0 console tty
3-5

44 Chapter 4 Configuring the EM-1240-LX
In this chapter, we describe how to configure the EM-1240-LX Series products.
The following topics are covered in this chapter:
Enabling and Disabling Daemons Adding a Web Page IPTABLES
Observe and erase chain rules Define policy for chain rules Append or delete rules:
NAT NAT Example Enabling NAT at Bootup
Configuring Dial-in/Dial-out Service Dial-out Service Dial-in Service
Configuring PPPoE How to Mount a Remote NFS Server Dynamic Driver Module Load/Unload Upgrading the Kernel Upgrading the Root File System & User Directory Loading Factory Defaults Autostarting User Applications on Bootup Checking the Kernel and Root File System Versions

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Enabling and Disabling Daemons The following daemons are enabled when the EM-1240-LX boots up for the first time.
SNMP Agent daemon: snmpd Telnet Server / Client daemon: telnetd Internet Daemons: inetd FTP Server / Client daemon: ftpd WWW Server daemon: boa
ATTENTION
How to enable/disable telnet/ftp server a. Edit the file ‘/etc/inetd.conf’
Example (default enable): discard dgram udp wait root /bin/discard discard stream tcp nowait root /bin/discard telnet stream tcp nowait root /bin/telnetd ftp stream tcp nowait root /bin/ftpd -l
b. Disable the daemon by typing ‘#’ in front of the first character of the row.
How to enable/disable /etc/inittab www server a. Edit the file ‘/etc/inittab’ b. Disable the www service by typing “#” in front of the first character of the row.
How to enable Network Time Protocol ntpdate is a time adjusting client utility. The EM-1240-LX plays the role of Time client, and sends requests to the Network Time Server to request the correct time.
Set the time server address for adjusting the system time with the command: />ntpdate ntp_server_ip
Save the system time to the hardware’s real time clock, with the command: />hwclock -w
Visit http://www.ntp/org for a recommended public NTP server list.
How to update the system time periodically with Network Time Protocol 1. Create a shell script file that includes the following description.
#!/bin/sh ntpdate ntp_server_ip hwclock –w sleep 100 The minimum time is 100 ms.
2. Save and make this shell script executable by typing chmod 755 <shell-script_name>
Edit the file ‘/etc/inittab’ by adding the following line: ntp: unknown: /directory/<shell_script_name>
4-2

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Adding a Web Page Default Home Page address:
/home/httpd/index.html
You may change the default home page directory by editing the web server’s configuration file, located at: /etc/boa.conf
Type the following command to edit the boa.conf file:
/etc>vi boa.conf
To add your web page, place your home page in the following directory:
/home/httpd/
IPTABLES IPTABLES is an administrative tool for setting up, maintaining, and inspecting the Linux kernel’s IP packet filter rule tables. Several different tables are defined, with each table containing built-in chains and user-defined chains.
Each chain is a list of rules that apply to a certain type of packet. Each rule specifies the action to be taken with a matching packet. A rule (such as a jump to a user-defined chain in the same table) is called a “target.”
The EM-1240-LX supports three types of IPTABLES tables: Filter tables, NAT tables, and Mangle tables:
A. Filter Table—includes three chains:
INPUT chain OUTPUT chain FORWARD chain
B. NAT Table—includes three chains:
PREROUTING chain—transfers the destination IP address (DNAT) POSTROUTING chain—works after the routing process and before the Ethernet device process to transfer the source IP address (SNAT) OUTPUT chain—produces local packets
sub-tables
4-3

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Source NAT (SNAT)—changes the first source packet IP address Destination NAT (DNAT)—changes the first destination packet IP address MASQUERADE—a special form for SNAT. If one host can connect to the Internet, then other computers that connect to this host can connect to the Internet when the computer does not have an actual IP address. REDIRECT—a special form of DNAT that re-sends packets to a local host independent of the destination IP address.
C. Mangle Table—includes two chains
PREROUTING chain—pre-processes packets before the routing process. OUTPUT chain—processes packets after the routing process. It has three extensions—TTL, MARK, TOS.
The following figure shows the IPTABLES hierarchy.
Incoming Packets
Mangle Table PREROUTING Chain
NAT Table PREROUTING Chain
NAT Table POSTROUTING Chain
Outgoing Packets
Other Host Packets
Mangle Table FORWARD Chain
Filter Table FORWARD Chain
Mangle Table POSTROUTING Chain
Filter Table INPUT Chain
Local Process
Mangle Table OUTPUT Chain
NAT Table OUTPUT Chain
Filter Table OUTPUT Chain
Mangle Table INPUT Chain
Local Host Packets
4-4

EM-1240-LX User’s Manual Configuring the EM-1240-LX
The EM-1240-LX supports the following sub-modules. Be sure to use the module that matches your application. You must load a module before you can use it. Use the insmod command to load a module.
x_tables xt_conntrack xt_helper xt_mark xt_pkttype xt_state xt_tcpudp xt_CLASSIFY xt_dccp xt_length xt_MARK xt_quota xt_statistic xt_comment xt_dscp xt_multiport xt_realm xt_string xt_connbytes xt_esp xt_mac xt_NFQUEUE xt_sctp xt_tcpmss xt_limit arptable_filter ip_nat iptable_raw ipt_hashlimit ipt_owner ipt_time arp_tables ip_nat_snmp_basic ip_tables ipt_iprange ipt_recent ipt_tos arpt_mangle ip_nat_tftp ipt_addrtype ipt_layer7 ipt_REDIRECT ipt_TOS ip_nat_amanda iptable_filter ipt_ah ipt_LOG ipt_REJECT ipt_ttl ip_nat_ftp iptable_mangle ipt_ecn ipt_MASQUERADE ipt_SAME ipt_TTL ip_nat_irc iptable_nat ipt_ECN ipt_NETMAP ipt_TCPMSS ipt_ULONG
NOTE The EM-1240-LX does NOT support IPV6 and ipchains. IPTABLES supports packet filtering or NAT. Take care when setting up the IPTABLES rules. If
the rules are not correct, remote hosts that connect via a LAN or PPP may be denied access. We recommend using the Serial Console to set up IPTABLES. Click on the following links for more information about iptables. http://www.linuxguruz.com/iptables/ http://www.netfilter.org/documentation/HOWTO//packet-filtering-HOWTO.html
Since the IPTABLES command is very complex, to illustrate the IPTABLES syntax we have divided our discussion of the various rules into three categories: Observe and erase chain rules, Define policy rules, and Append or delete rules.
Observe and erase chain rules Usage: # iptables [-t tables] [-L] [-n]
-t tables: Table to manipulate (default: ‘filter’); example: nat or filter. -L [chain]: List List all rules in selected chains. If no chain is selected, all chains are listed. -n: Numeric output of addresses and ports.
# iptables [-t tables] [-FXZ] -F: Flush the selected chain (all the chains in the table if none is listed). -X: Delete the specified user-defined chain. -Z: Set the packet and byte counters in all chains to zero.
4-5

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Examples: # iptables -L -n In this example, since we do not use the -t parameter, the system uses the default ‘filter’ table. Three chains are included: INPUT, OUTPUT, and FORWARD. INPUT chains are accepted automatically, and all connections are accepted without being filtered. #iptables –F #iptables –X #iptables –Z
Define policy for chain rules Usage: # iptables [-t tables] [-P] [INPUT, OUTPUT, FORWARD, PREROUTING, OUTPUT, POSTROUTING] [ACCEPT, DROP] -P: Set the policy for the chain to the given target. INPUT: For packets coming into the EM-1240-LX. OUTPUT: For locally-generated packets. FORWARD: For packets routed out through the EM-1240-LX. PREROUTING: To alter packets as soon as they come in. POSTROUTING: To alter packets as they are about to be sent out.
Examples: #iptables –P INPUT DROP #iptables –P OUTPUT ACCEPT #iptables –P FORWARD ACCEPT #iptables –t nat –P PREROUTING ACCEPT #iptables –t nat –P OUTPUT ACCEPT #iptables -t nat –P POSTROUTING ACCEPT In this example, the policy accepts outgoing packets and denies incoming packets.
Append or delete rules: Usage: # iptables [-t table] [-AI] [INPUT, OUTPUT, FORWARD] [-io interface] [-p tcp, udp, icmp, all] [-s IP/network] [--sport ports] [-d IP/network] [--dport ports] –j [ACCEPT. DROP]
-A: Append one or more rules to the end of the selected chain. -I: Insert one or more rules in the selected chain as the given rule number. -i: Name of an interface via which a packet is going to be received. -o: Name of an interface via which a packet is going to be sent. -p: The protocol of the rule or of the packet to check. -s: Source address (network name, host name, network IP address, or plain IP
address). --sport: Source port number. -d: Destination address. --dport: Destination port number. -j: Jump target. Specifies the target of the rules; i.e., how to handle matched packets.
For example, ACCEPT the packet, DROP the packet, or LOG the packet. Examples: Example 1: Accept all packets from lo interface. # iptables –A INPUT –i lo –j ACCEPT
Example 2: Accept TCP packets from 192.168.0.1. # iptables –A INPUT –i eth0 –p tcp –s 192.168.0.1 –j ACCEPT
Example 3: Accept TCP packets from Class C network 192.168.1.0/24. # iptables –A INPUT –i eth0 –p tcp –s 192.168.1.0/24 –j ACCEPT
4-6

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Example 4: Drop TCP packets from 192.168.1.25. # iptables –A INPUT –i eth0 –p tcp –s 192.168.1.25 –j DROP
Example 5: Drop TCP packets addressed for port 21. # iptables –A INPUT –i eth0 –p tcp --dport 21 –j DROP
Example 6: Accept TCP packets from 192.168.0.24 to the EM-1240-LX’s port 137, 138, 139 # iptables –A INPUT –i eth0 –p tcp –s 192.168.0.24 --dport 137:139 –j ACCEPT
Example 7: Log TCP packets that visit EM-1240-LX’s port 25. # iptables –A INPUT –i eth0 –p all –m mac –-mac-source 01:02:03:04:05:06 –j DROP
Example 8: Drop all packets from MAC address 01:02:03:04:05:06. # iptables –A INPUT –i eth0 –p all –m mac –mac-source 01:02:03:04:05:06 –j DROP
NAT NAT (Network Address Translation) protocol translates IP addresses used on one network into different IP addresses used on another network. One network is designated the inside network and the other is the outside network. Typically, the EM-1240-LX connects several devices on a network and maps local inside network addresses to one or more global outside IP addresses, and remaps the global IP addresses on incoming packets back into local IP addresses.
NOTE Click the following link for more information about iptables and NAT: http://www.netfilter.org/documentation/HOWTO/NAT-HOWTO.html
NAT Example The IP addresses of all packets leaving LAN1 are changed to 192.168.3.127 (you will need to load the module ipt_MASQUERADE):
1. First load the following device drivers: x_tables.ko xt_multiport.ko xt_MARK.ko xt_tcpudp.ko ip_tables.ko ip_nat.ko iptable_nat.ko ipt_MASQUERADE.ko
2. #echo 1 > /proc/sys/net/ipv4/ip_forward 3. #iptables -t nat –A POSTROUTING –o eth0 –j SNAT --to-source 192.168.3.127
or 4. #iptables –t nat –A POSTROUTING –o eth0 –j MASQUERADE
Enabling NAT at Bootup In most real world situations, you should use a simple shell script to enable NAT when the EM-1240-LX boots up, as indicated by the following:
1. setting iptables 2. iptables-save > /home/xxx.file (xxx.file is the user defined file name) 3. vi /etc/rc 4. Append echo 1 > /proc/sys/net/ipv4/ip_forward 5. Append iptables-restore /home/xxx.file (xxx.file is the user defined file name)
4-7

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Configuring Dial-in/Dial-out Service
Dial-out Service Direct cable connection:
Without username and password, use: />pppd connect ‘chat –v’ /dev/ttyM0 38400 crtscts&
With username and password, use: />pppd connect ‘chat –v’ user xxxxx password xxxxx /dev/ttyM0 38400 crtscts&
Connect Using a Modem: Use: />pppd connect ‘chat –v ATDT<phone_number> CONNECT’ user xxxxx password xxxxx /dev/ttyM0 38400 crtscts&
ATTENTION
If dial out fails, the pppd connection will be blocked, and users will need to shut down pppd, and re-dial. Since the return value is always OK (regardless of whether or not the connection is blocked), the API must be set up to check the network status to determine if the connection is complete.
Dial-in Service Direct cable connection:
Use either of the following: />pppd <Local_IP_Address>:<Remote_IP_Address> /dev/ttyM1 38400 local crtscts or />pppd <Local_IP_Address>:<Remote_IP_Address> /dev/ttyM0 38400 local crtscts login auth
Connect Using a Modem: Use: />pppd connect ‘chat –v AT CONNECT’ <local_IP_Address>:<Remote_IP_Address> /dev/ttyM0 38400 crtscts login auth
Configuring PPPoE PPPoE relies on two widely accepted standards: PPP and Ethernet, which permits the use of PPPoE(Point-to-Point Over Ethernet).
PPPoE is a specification for connecting users on an Ethernet to the Internet through a common broadband medium, such as a single DSL line, wireless device or cable modem, used by many ADSL service providers. All users on the Ethernet share a common connection, so the Ethernet principles that support multiple users on a LAN combine with the PPP principles, which apply to serial connections.
Create the Connection: />pppd pty “pppoe -I <ETHERNET_INTERFACE> -m 1412” user <USER_NAME> password <USER_PASSWORD>&
4-8

EM-1240-LX User’s Manual Configuring the EM-1240-LX
<ETHERNET_INTERFACE>: Ethernet card connected to ADSL modem, for example, eth0 <USER_NAME>: User account, for example, [email protected] <USER_PASSWORD>: Password for user account
To check if PPPOE is successfully connected, use the command:
/>ifconfig ppp0
How to Mount a Remote NFS Server Currently, the EM-1240-LX only supports NFS (Network File System) clients. Users can open NFS service on a Linux PC to enable the EM-1240-LX to push data to it. The EM-1240-LX can use NFS to mount a remote disk as a local disk for data or log purposes.
1. First, the NFS server must open an export directory and allow access to the IP address. Edit the file “/etc/exports” on your Linux PC, and then run the NFS daemon. The following example gives one possibility (refer to the NFS-HOWTO document at http://nfs.sourceforge.net/nfs-howto/server.html): /home/usr 192.168.3.1 (rw,no_root_squash,no_all_squash)
2. The EM-1240-LX must run the “portmap” utility. This program is enabled by default in the “/etc/rc” file. Use the following command to mount the remote NFS server: />mount –t nfs <remote-ip>:<remote-export-directory> <local-directory>
Dynamic Driver Module Load/Unload Besides supporting traditional static drivers, the EM-1240-LX also supports the dynamic driver module load / unload mechanism. It allows users to load a special driver into the kernel to enable hardware features for specific applications. To load / unload a dynamic driver module, use the following commands. Load module: />insmod <module-directory>/<module file name> For example, to load the UART driver, type the following command: />insmod /lib/modules/2.6.9-MoXaRt/kernel/drivers/char/mxser.ko Show module list: />lsmod Unload module: />rmmod <module-name listed by lsmod command> For example, to unload the UART driver, type the following command: />rmmod mxser For the EM-1240-LX, the factory default is to load the UART driver mxser.ko. An additional driver module for controlling the SD/MMC memory card is loaded for the EM-1240-LX. The location and file name for these driver modules is given below.
UART: /lib/modules/2.6.9-MoXaRt/kernel/drivers/char/mxser.ko
SD/MMC: /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/mmc_core.ko /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/mmc_block.ko /lib/modules/2.6.9-MoXaRt/kernel/drivers/mmc/moxasd.ko
4-9

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Upgrading the Kernel The EM-1240-LX kernel is em1240-1.x..bin, which can be downloaded from www.moxa.com. You must first download this file to your PC, and then use Console Terminal or Telnet Console to copy the file to the EM-1240-LX.
You can save this file to the EM-1240-LX’s RAM disk, and then upgrade the kernel. The following is a step-by-step example.
To enable the RAM disk, use the following command:
/>upramdisk
As illustrated below, after executing “upramdisk”, you may use “mount” to determine if the new ramdisk was created successfully or not.
Use the following command to navigate to the device node:
/>cd ramdisk
Use the built-in FTP client to download the file em1240-1.x.bin from the PC.
/ramdisk>ftp <destination PC’s IP> Login Name: xxxx Login Password: xxxx ftp> bin ftp> get em1240-1.x.bin
Use the upkernel command to upgrade the kernel and root file system.
/ramdisk>upkernel em1240-1.x.bin /ramdisk>reboot
4-10

EM-1240-LX User’s Manual Configuring the EM-1240-LX
Upgrading the Root File System & User Directory The EM-1240-LX uses JFFS2 for the root file system and user directory. By default, the root file system is pre-set to READ only. The EM-1240-LX provides a read/write user’s directory in the JFFS2 file system. By using this user’s directory, the system configuration file and user’s program can be stored on this disk.
Search the EM-1240-LX’s CD-ROM for the latest user directory file, or download the file from www.moxa.com. The format is em1240-1.x.dsk. You must download this file to a PC first, and then use Console Terminal or Telnet Console to copy the file to the EM-1240-LX.
You can save this file to the EM-1240-LX’s RAM disk, and then upgrade the user directory. The following is a step-by-step example.
To enable the RAM disk, use the following commands.
/>upramdisk />cd ramdisk
Use the built-in FTP client to download the em1240-1.x.dsk file from the PC.
/ramdisk>ftp <destination PC’s IP> Login Name: xxxx Login Password: xxxx ftp> bin ftp> get em1240-1.x.dsk ftp>quit /ramdisk>upkernel /ramdisk/em1240-1.x.dsk /reboot
4-11

EM-1240-LX User’s Manual Configuring the EM-1240-LX
4-12
Loading Factory Defaults The easiest way to “Load Factory Defaults” is with the “Upgrade User directory” operation.
Refer to the previous section, “Upgrading the Root File System & User Directory,” for an introduction.
You may also press the RESET button for more than 5 seconds to load the factory default configuration, or input the command “ldfactory” from the Telnet console to restore the factory defaults.
Autostarting User Applications on Bootup Edit the /etc/rc file by adding your application program. E.g.,
/ap-directory/ap-program &
Checking the Kernel and Root File System Versions Use the following commands to check the version of the kernel and root file system:
To check the kernel version:
/>kversion
To check the root file system (firmware) version of the EM-1240-LX, type:
/>fsversion
You may also check the user directory version of the EM-1240-LX by using the following command:
/>cat /etc/version

55 Chapter 5 EM-1240-LX Device API
In this chapter, we discuss the Device API for the EM-1240-LX Series. We introduce the APIs for the following functions:
RTC (Real-time Clock) Buzzer UART Interface GPIO

EM-1240-LX User’s Manual EM-1240-LX Device API
RTC (Real-time Clock) The device node is located at /dev/rtc. The EM-1240-LX supports µClinux standard simple RTC control. You must include <linux/rtc.h> to use these functions.
1. Function: RTC_RD_TIME int ioctl(fd, RTC_RD_TIME, struct rtc_time *time); Description: Reads time information from RTC.
2. Function: RTC_SET_TIME int ioctl(fd, RTC_SET_TIME, struct rtc_time *time); Description: Sets RTC time.
Buzzer The device node is located at /dev/console. The EM-1240-LX supports µClinux standard buzzer control. The EM-1240-LX’s buzzer runs at a fixed frequency of 100 Hz. You must include <sys/kd.h> to use these functions.
1. Function: KDMKTONE ioctl(fd, KDMKTONE, unsigned int arg); Description: Buzzer will beep, as stipulated by the function arguments.
UART Interface The normal tty device node is located at /dev/ttyM0…ttyM1, and the modem tty device node is located at /dev/com0 … com1. The EM-1240-LX Series supports µClinux standard termios control. The Moxa UART Device API supports configurations ttyM0 to ttyM1, as RS-232/422/485. To use these functions, after the Tool Chain package is installed, include <moxadevice.h> in your application.
#define RS232_MODE 0 #define RS485_2WIRE_MODE 1 #define RS422_MODE 2 #define RS485_4WIRE_MODE 3
1. Function: MOXA_SET_OP_MODE
int mode; mode=which mode you want to set; int ioctl(fd, MOXA_SET_OP_MODE, &mode)
Description: Sets the interface mode.
2. Function: MOXA_GET_OP_MODE
int mode; int ioctl(fd, MOXA_GET_OP_MODE, &mode)
Description: Gets the interface mode.
5-2

EM-1240-LX User’s Manual EM-1240-LX Device API
GPIO GPIO stands for General Purpose I/O. GPIOs are user-programmable, and can be used for either digital input or digital output, since the signals are all in TTL format.
Moxa GPIO API Moxa provides an API library with static link for customers using the EM-1220 or EM-1240 (note that dynamic link is not supported). Users can use source code provided by Moxa so that the ioctl() command can be used by the operating system to communicate with drivers.
API List int get_gpio_mode(unsigned int pio)
--to check if the current GPIO setting is DI or DO.
Input:
unsigned int pio - GPIO port number
Each GPIO point will be regarded as a port. We support from Port 0 to Port 9 for the EM-1240, and from Port 0 to Port 7 for the EM-1220.
Output:
1 represents DI. 0 represents DO.
Return:
< 0 is wrong. = 0 is correct.
int get_gpio_data(unsigned int pio)
--to check the current status of the GPIO, either high or low voltage.
Input:
unsigned int pio - GPIO port number
Each GPIO point will be regarded as a port. We support from Port 0 to Port 9 for the EM-1240, and from Port 0 to Port 7 for the EM-1220.
Output:
1 represents high. 0 represents low.
Return:
< 0 is wrong. = 0 is correct.
5-3

EM-1240-LX User’s Manual EM-1240-LX Device API
int set_gpio_mode(unsigned int pio, int mode)
--to configure GPIO ports to be DI ports or DO ports.
Input:
unsigned int pio - GPIO port number
Each GPIO point will be regarded as a port. We support from Port 0 to Port 9 for the EM-1240, and from Port 0 to Port 7 for the EM-1220.
int mode 1 represents DI. 0 represents DO.
Output:
1 represents high. 0 represents low.
Return:
< 0 is wrong. = 0 is correct.
int set_gpio_data(unsigned int pio, int data)
--to check the current status of the GPIO, either high or low voltage, used when the GPIO points are configured as DO.
Input:
unsigned int pio - GPIO port number
Each GPIO point will be regarded as a port. We support from Port 0 to Port 9 for the EM-1240, and from Port 0 to Port 7 for the EM-1220.
int data 1 represents high. 0 represents low.
Output:
1 represents high. 0 represents low.
Return:
< 0 is wrong. = 0 is correct.
How to use the GPIO 1. The device driver must be loaded.
> insmod gpio.ko
2. The program must include <moxadevice.h> and link to libmoxalib.a. Here is an example: > arm-elf-gcc –wl, -elf2flt –o TestGpioAp TestGpioAp.c –lmoxalib –lpthread
5-4

EM-1240-LX User’s Manual EM-1240-LX Device API
Limits 1. Both the SD card and GPIO share the same signals. To enable the GPIO, the SD card must be
disabled, and vice versa. Drivers will not automatically check if the signal is from the SD or GPIO; users must determine where the signal comes from before using the signal.
2. Both moxadevice.h and libmoxalib.a are supported in Tool Chain v1.6 and newer versions.
GPIO Library Source Code /* * History: * Date Author Comment * 12-06-2005 Victor Yu. Create it. */ #include <stdio.h> #include <stdlib.h> #include <fcntl.h>
// following about GPIO API implement #define GPIO_DEVICE_NODE “/dev/pio”
#define IOCTL_GPIO_GET_MODE 1 #define IOCTL_GPIO_SET_MODE 2 #define IOCTL_GPIO_GET_DATA 3 #define IOCTL_GPIO_SET_DATA 4
#define MAX_GPIO 10 #define GPIO_NO_ERROR -1 // the GPIO number error #define GPIO_MODE_ERROR -2 // the GPIO mode error #define GPIO_DATA_ERROR -3 // the GPIO data error #define GPIO_NODE_ERROR -4 // open GPIO device node error #define GPIO_ERROR -5 // some error, get error number from errno #define GPIO_INPUT 1 // the GPIO mode is input #define GPIO_OUTPUT 0 // the GPIO mode is output #define GPIO_HIGH 1 // the GPIO data is high #define GPIO_LOW 0 // the GPIO data is low #define GPIO_OK 0 // function is OK
#define CHECK_GPIO_NO(p) { \ if ( (p) >= MAX_GPIO ) \ return GPIO_NO_ERROR; \ } #define CHECK_GPIO_MODE(m) { \ if ( (m) != GPIO_INPUT && (m) != GPIO_OUTPUT ) \ return GPIO_MODE_ERROR; \ }
#define CHECK_GPIO_DATA(d) { \ if ( (d) != GPIO_HIGH && (d) != GPIO_LOW ) \ return GPIO_DATA_ERROR; \ }
5-5
EM-1240-LX User’s Manual EM-1240-LX Device API
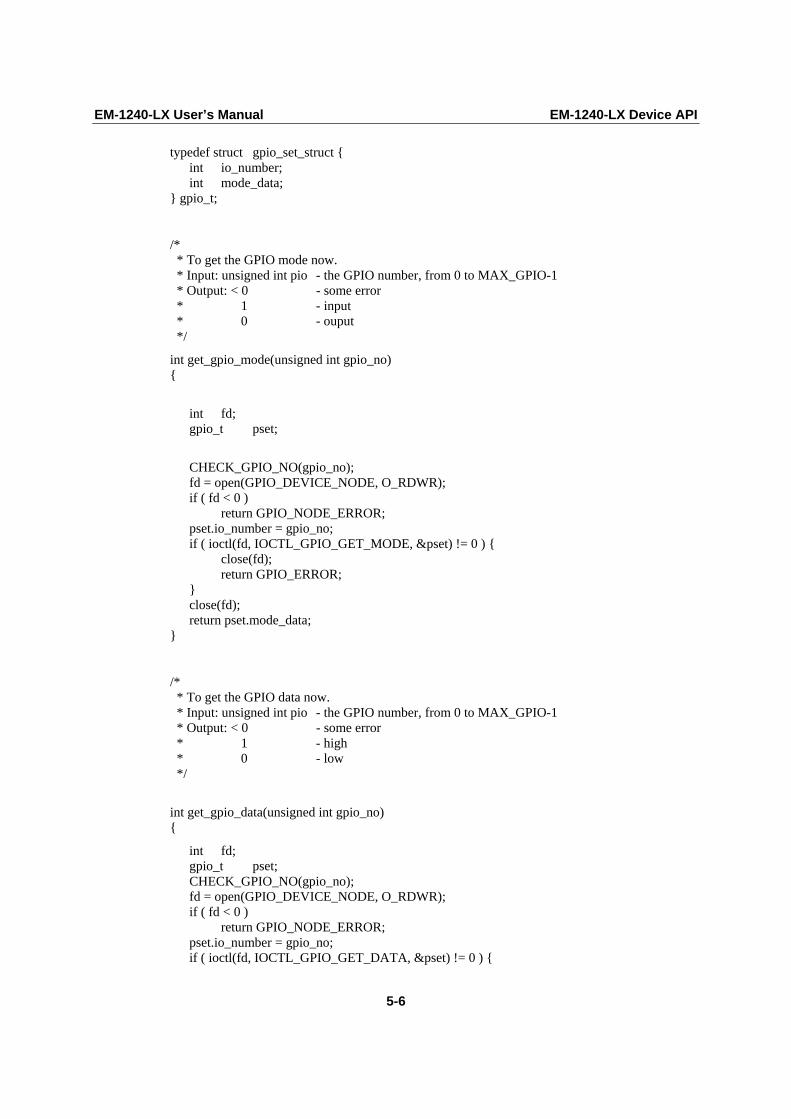
typedef struct gpio_set_struct { int io_number; int mode_data; } gpio_t;
/* * To get the GPIO mode now. * Input: unsigned int pio - the GPIO number, from 0 to MAX_GPIO-1 * Output: < 0 - some error * 1 - input * 0 - ouput */
int get_gpio_mode(unsigned int gpio_no) {
int fd; gpio_t pset;
CHECK_GPIO_NO(gpio_no); fd = open(GPIO_DEVICE_NODE, O_RDWR); if ( fd < 0 ) return GPIO_NODE_ERROR; pset.io_number = gpio_no; if ( ioctl(fd, IOCTL_GPIO_GET_MODE, &pset) != 0 ) { close(fd); return GPIO_ERROR; } close(fd); return pset.mode_data; }
/* * To get the GPIO data now. * Input: unsigned int pio - the GPIO number, from 0 to MAX_GPIO-1 * Output: < 0 - some error * 1 - high * 0 - low */
int get_gpio_data(unsigned int gpio_no) {
int fd; gpio_t pset; CHECK_GPIO_NO(gpio_no); fd = open(GPIO_DEVICE_NODE, O_RDWR); if ( fd < 0 ) return GPIO_NODE_ERROR; pset.io_number = gpio_no; if ( ioctl(fd, IOCTL_GPIO_GET_DATA, &pset) != 0 ) {
5-6

EM-1240-LX User’s Manual EM-1240-LX Device API
close(fd); return GPIO_ERROR; } close(fd); return pset.mode_data; }
/* * To set the GPIO now mode. * Input: unsigned int pio - the GPIO number, from 0 to MAX_GPIO-1 * int mode - want to set mode, 1 for input, 0 for output * Output: < 0 - some error * = 0 - OK */
int set_gpio_mode(unsigned int gpio_no, int mode)
{ int fd; gpio_t pset;
CHECK_GPIO_NO(gpio_no); CHECK_GPIO_MODE(mode); fd = open(GPIO_DEVICE_NODE, O_RDWR); if ( fd < 0 ) return GPIO_NODE_ERROR; pset.io_number = gpio_no; pset.mode_data = mode; if ( ioctl(fd, IOCTL_GPIO_SET_MODE, &pset) != 0 ) { close(fd); return GPIO_ERROR; } close(fd); return GPIO_OK; }
/* * To set the GPIO now data. * Input: unsigned int pio - the GPIO number, from 0 to MAX_GPIO-1 * int data - 1 for high, 0 for low * Output: < 0 - some error * = 0 - OK */
int set_gpio_data(unsigned int gpio_no, int data) { int fd; gpio_t pset;
5-7

EM-1240-LX User’s Manual EM-1240-LX Device API
5-8
CHECK_GPIO_NO(gpio_no); CHECK_GPIO_DATA(data); fd = open(GPIO_DEVICE_NODE, O_RDWR); if ( fd < 0 ) return GPIO_NODE_ERROR; pset.io_number = gpio_no; pset.mode_data = data; if ( ioctl(fd, IOCTL_GPIO_SET_DATA, &pset) != 0 ) { close(fd); return GPIO_ERROR; } close(fd); return GPIO_OK; }
AA Appendix A System Commands
µClinux normal command utility collection
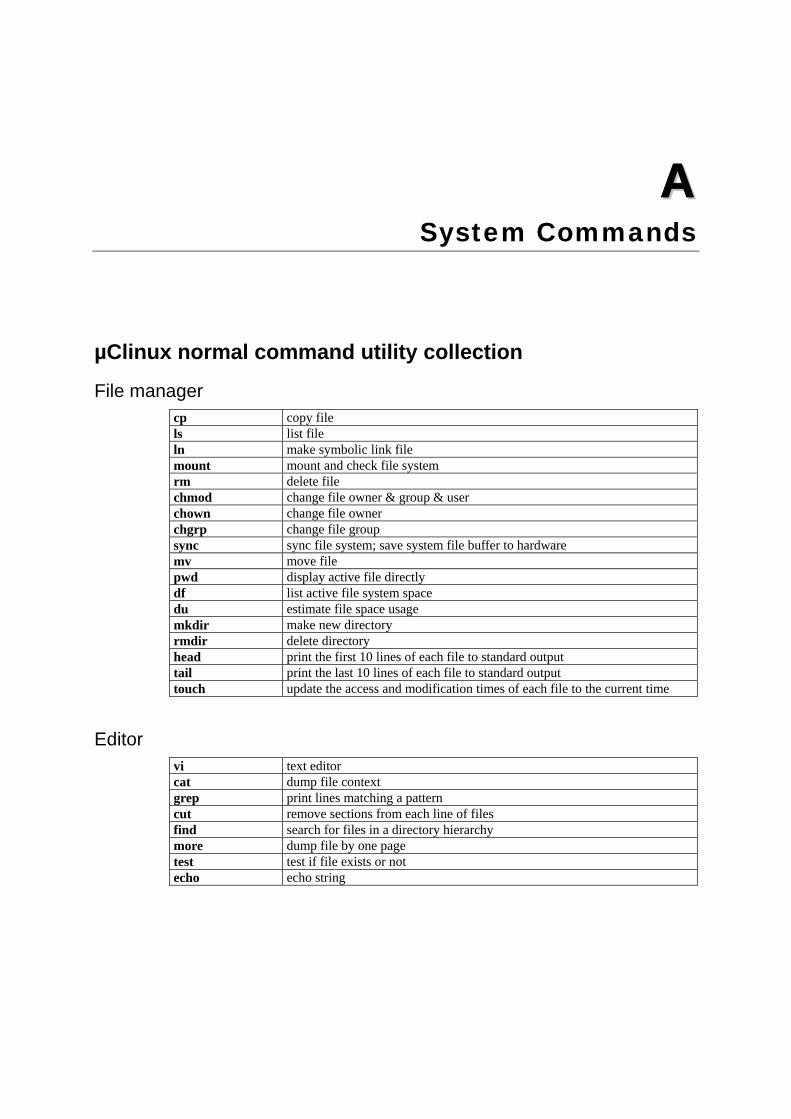
File manager cp copy file ls list file ln make symbolic link file mount mount and check file system rm delete file chmod change file owner & group & user chown change file owner chgrp change file group sync sync file system; save system file buffer to hardware mv move file pwd display active file directly df list active file system space du estimate file space usage mkdir make new directory rmdir delete directory head print the first 10 lines of each file to standard output tail print the last 10 lines of each file to standard output touch update the access and modification times of each file to the current time
Editor vi text editor cat dump file context grep print lines matching a pattern cut remove sections from each line of files find search for files in a directory hierarchy more dump file by one page test test if file exists or not echo echo string

EM-1240-LX User’s Manual System Commands
A-2
Network ping ping to test network route routing table manager netstat display network status ifconfig set network IP address tftp tftp protocol telnet user interface to TELNET protocol ftp file transfer protocol iptables iptables command
Process kill kill process killall kill process by name ps report process status sleep suspend command on time
Other dmesg dump kernel log message stty set serial port mknod make device node free display system memory usage date print or set the system date and time env run a program in a modified environment clear clear the terminal screen reboot reboot / power off/on the server halt halt the server gzip, gunzip, zcat compress or expand files hostname show system’s host name tar tar archiving utility
Moxa Special Utilities cat /etc/version show user directory version upramdisk mount ramdisk downramdisk unmount ramdisk kversion show kernel version setinterface set UART interfaces program

BB Appendix B SNMP Agent with MIB II & RS-232 Like
Group
The EM-1240-LX has a built-in SNMP (Simple Network Management Protocol) agent that supports RFC1317 RS-232 like group and RFC 1213 MIB-II. The following table lists the variable implementation for the EM-1240-LX.
The full SNMP object ID of EM-1240-LX is .iso.3.6.1.4.1.8691.12.7112 and .iso.3.6.1.4.1.8691.12.1240.
Note: The EM-1240-LX does not support SNMP trap.
RFC1213 MIB-II supported SNMP variables:
system MIB interface MIB at MIB icmp MIB sysDescr sysObjectID sysUpTime sysContact sysName sysLocation sysServices
ifNumber ifTable ifIndex ifDescr ifType ifMtu ifSpeed ifPhysAddress ifAdminStatus ifOperStatus ifLastChange ifInOctets ifInUcastPkts ifInNUcastPkts ifInDiscards ifInErrors ifInUnknownProtos ifOutOctets ifOutUcastPkts ifOutNUcastPkts ifOutDiscards ifOutErrors ifOutQLen ifSpecific
atTable atIfIndex atPhysAddress atNetAddress
icmpInMsgs icmpInErrors icmpInDestUnreachs icmpInTimeExcds icmpInParmProbs icmpInSrcQuenchs icmpInRedirects icmpInEchos icmpInEchoReps icmpInTimestamps icmpInAddrMasks icmpInAddrMaskReps icmpOutMsgs icmpOutErrors icmpOutDestUnreachs icmpOutTimeExcds icmpOutParmProbs icmpOutSrcQuenchs icmpOutRedirects icmpOutEchos icmpOutEchoReps icmpOutTimestamps icmpOutAddrMasks icmpOutAddrmaskReps
EM-1240-LX User’s Manual SNMP Agent with MIB II & RS-232 Like Group
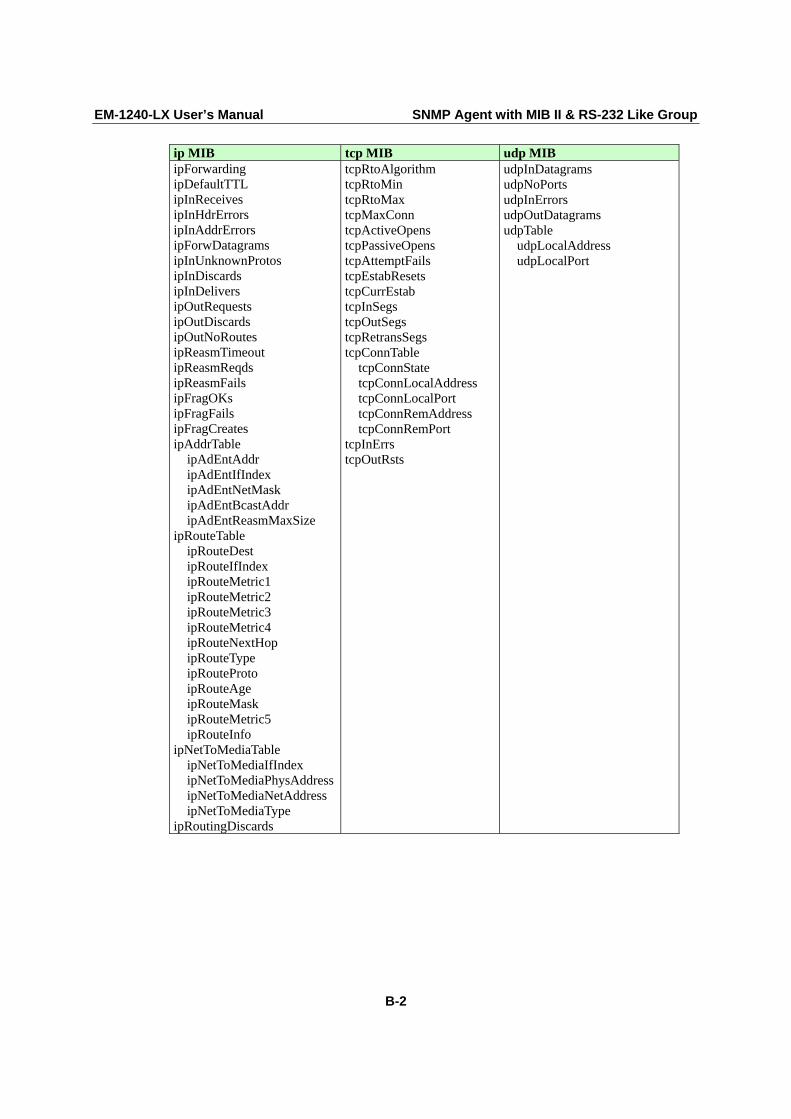
ip MIB tcp MIB udp MIB ipForwarding ipDefaultTTL ipInReceives ipInHdrErrors ipInAddrErrors ipForwDatagrams ipInUnknownProtos ipInDiscards ipInDelivers ipOutRequests ipOutDiscards ipOutNoRoutes ipReasmTimeout ipReasmReqds ipReasmFails ipFragOKs ipFragFails ipFragCreates ipAddrTable ipAdEntAddr ipAdEntIfIndex ipAdEntNetMask ipAdEntBcastAddr ipAdEntReasmMaxSize ipRouteTable ipRouteDest ipRouteIfIndex ipRouteMetric1 ipRouteMetric2 ipRouteMetric3 ipRouteMetric4 ipRouteNextHop ipRouteType ipRouteProto ipRouteAge ipRouteMask ipRouteMetric5 ipRouteInfo ipNetToMediaTable ipNetToMediaIfIndex ipNetToMediaPhysAddress ipNetToMediaNetAddress ipNetToMediaType ipRoutingDiscards
tcpRtoAlgorithm tcpRtoMin tcpRtoMax tcpMaxConn tcpActiveOpens tcpPassiveOpens tcpAttemptFails tcpEstabResets tcpCurrEstab tcpInSegs tcpOutSegs tcpRetransSegs tcpConnTable tcpConnState tcpConnLocalAddress tcpConnLocalPort tcpConnRemAddress tcpConnRemPort tcpInErrs tcpOutRsts
udpInDatagrams udpNoPorts udpInErrors udpOutDatagrams udpTable udpLocalAddress udpLocalPort
B-2

EM-1240-LX User’s Manual SNMP Agent with MIB II & RS-232 Like Group
B-3
snmp MIB snmpInPkts snmpOutPkts snmpInBadVersions snmpInBadCommunityNames snmpInBadCommunityUses snmpInASNParseErrs snmpInTooBigs snmpInNoSuchNames snmpInBadValues snmpInReadOnlys snmpInGenErrs snmpInTotalReqVars snmpInTotalSetVars snmpInGetRequests snmpInGetNexts snmpInSetRequests snmpInGetResponses snmpInTraps snmpOutTooBigs snmpOutNoSuchNames snmpOutBadValues snmpOutGenErrs snmpOutGetRequests snmpOutGetNexts snmpOutSetRequests snmpOutTraps snmpEnableAuthenTraps
RFC1317 RS-232 like group supported variables
rs232 MIB rs232Number rs232PortTable rs232PortIndex rs232PortType rs232PortInSigNumber rs232PortOutSigNumber rs232PortInSpeed rs232PortOutSpeed rs232AsyncPortTable rs232AsyncPortIndex rs232AsyncPortBits rs232AsyncPortStopBits rs232AsyncPortParity rs232InSigTable rs232InSigPortIndex rs232InSigName rs232InSigState rs232OutSigTable rs232OutSigPortIndex rs232OutSigName rs232OutSigState

CC Appendix C EM-1240-LX FAQ
FAQ 1 Why can I only use vfork( ),and am not able to use fork( )?
Answer 1 μClinux only supports vfork( ). It does not support fork( ). Note that when using vfork( ), the parent process will hang until the child process calls an exec group API, or exits.
FAQ 2 When using a pthread group API, why can’t I use SIGUSR1 and SIGUSR2?
Answer 2 Since a pthread group API uses SIGUSR1 and SIGUSR2 to do a pthread control suspend and restart the exit function, we cannot use the SIGUSR1 and SIGUSR2 signals. You will get the same result if you link the pthread. This means that you cannot use -1pthread to add an option to the linker.
FAQ 3 What is the correct format for linking to an API?
Answer 3 arm-elf-gcc –W1, -elf2flt (In this example, the API converts elf format to flat format.)